Embed Size (px)
Citation preview

Navigation with Cellular CDMA SignalsJOE KHALIFE, KIMIA SHAMAEI, AND ZAK KASSAS
MOTIVATION
Global navigation satellite system (GNSS) is at theheart of autonomous vehicles navigation systems.However, GNSS signals are unreliable due to:
• Severe attenuation in deep urban canyons
• Intentional and/or unintentional jamming
• Spoofing!
APPROACH: EXPLOIT SOPS
Ambient signals of opportunity (SOPs) may en-hance and assist conventional navigation tech-niques.
CHALLENGES
• Unavailability of SOP models for naviga-tion purposes
• Unavailability of receiver architectures fornavigation observables extraction
• Unknown SOP emitters’ states (position andclock)
• Less stable clocks than GNSS satellite vehicles
CELLULAR CDMA AS SOPS
• Uses code division multiple access (CDMA),which is suitable for ranging
• Abundant and free to use
• Higher received power and bandwidth thanGNSS
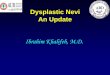
CELLULAR CDMA NAVIGATION SOFTWARE-DEFINED RECEIVER
We implemented a cellular CDMA software-defined radio in LabVIEW to optimally extract relevanttiming and positioning information. Although these signals were intended for communications, we wereable to model them in terms of navigation observables. The receiver has three stages:
(a) Acquisition: Signals from different BTSs are identified and a coarse estimate of their correspondingcode delay and Doppler frequency is obtained.(b) Tracking: These estimates are maintained and refined via tracking loops.(c) Decoding: The message transmitted by the BTS is decoded and relevant information is extracted.
(a) (b)
(c)
(a) (b) (c)
LabVIEW Virtual Instruments
NAVIGATION FRAMEWORK
The pseudorange measurement ρ is given by
ρ = ||rr − rBTS ||2 + c · (δtr − δtBTS) + v,
rr: receiver position rBTS : BTS position
δtr: receiver clock bias δtBTS : BTS clock bias
v: measurement noise c: speed-of-light
Central
Navigating
Mapping
Receiver
BTSi
Receiver
Database
BTS2
BTS1
rBTS
δtBTS
EXPERIMENTAL DEMO
GRID
1
2 3 4
5 6
7
Estimated Estimated
BTS3
BTS1BTS2
Mapping
Receiver
Navigating
Receiver
Trajectory Trajectory
Cellular CDMAGPS
Mean Error: 5.51 m Standard Deviation: 4.01 m
ACKNOWLEDGEMENT
This work was supported in part by the Office of Naval Re-
search (ONR) under Grant N00014-16-1-2305, and part by a grant
from the National Center for Sustainable Transportation (NCST),
supported by the U.S. Department of Transportation (USDOT)
through the University Transportation Centers Program.
REFERENCES
[1] J. J. Khalife, K. Shamaei, Z. M. Kassas. “A Software-DefinedReceiver Architecture for Cellular CDMA-Based Naviga-tion,” IEEE/ION PLANS 2016, April 2016.Best student paper award.












![Contribution to the Eco-Palynological Studies of Wadi El ...Appelgren [6] vegetation has been widely used to describe habitat characteristics [7]. Kassas Stated that, in Egypt, desert](https://img.pdfslide.us/doc/110x75/5f1772a30a1c2d16234db59a/contribution-to-the-eco-palynological-studies-of-wadi-el-appelgren-6-vegetation.jpg)