Embed Size (px)
Citation preview

Introduction to Stochastic OptimizationPart 2: Formulation of single-stage portfolio
optimization problems
Georg Ch. Pflug
April 23, 2009
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Acceptability, risk and deviation risk functionals
Definition: Acceptability functionals. A real valued mapping Adefined on a linear space Y of random variables on (Ω,F , P) iscalled acceptability functional, if the following properties (A1) –(A3) are true for all Y ∈ Y.
(A1) Translation equivariance.
A(Y + c) = A(Y ) + c
for all constants c .
(A2) Concavity.
A(λY (1) + (1− λ)Y (2)) ≥ λA(Y (1)) + (1− λ)A(Y (2))
for 0 ≤ λ ≤ 1 .
(A3) Monotonicity.
Y (1) ≤ Y (2) a.s. implies that A(Y (1)) ≤ A(Y (2)).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Definition: Isotonicity w.r.t. stochastic ordering.A version-independent acceptability functional is called isotonicw.r.t. first order stochastic dominance, if
(A3.1) Y (1) ≺FSD Y (2) implies A(Y (1)) ≤ A(Y (2)).
A version-independent acceptability functional is called isotonicw.r.t. second order stochastic dominance, if
(A3.2) Y (1) ≺SSD Y (2) implies A(Y (1)) ≤ A(Y (2)).
(A3.2) is stronger than (A3.1).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Definition: Positive homogeneity. An acceptability functional iscalled positively homogeneous, if it satisfies
(A4) A(λY ) = λA(Y )for λ ≥ 0 .
Definition: Strictness. An acceptability functional A is calledstrict, if it satisfies
(A5) A(Y ) ≤ E(Y ).
Remark. ρ(Y ) := −A(Y ) is called risk functional (coherent riskfunctionals were introduced by Artzner, Delbaen, Eber, Heath,(1999), convex risk functionals by Foellmer and Schied (2002)).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Definition: Deviation risk functionals. A real valued mapping Ddefined on a linear space Y of random variables on (Ω,F , P) iscalled deviation risk functional, if it exhibits for all Y ∈ Y thefollowing properties (D1) – (D3).
(D1) Translation invariance.
D(Y + c) = D(Y )
for constant c.
(D2) Convexity.
D(λY (1) + (1− λ)Y (2)) ≤ λD(Y (1)) + (1− λ)D(Y (2))
for 0 ≤ λ ≤ 1.
(D3) Monotonicity.
X ≤ Y implies that E(X )−D(X ) ≤ E(Y )−D(Y ).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Definition: Positive homogeneity. A deviation risk functional Dis called positively homogeneous, if it satisfies
(D4) D(λY ) = λD(Y ) for λ ≥ 0.
Definition: Strictness. A deviation risk functional D is calledstrict, if it satisfies
(D5) D(Y ) ≥ 0.
Notice that D satisfies (Di) if and only if A(Y ) = E(Y )−D(Y )satisfies (Ai), where i = 1, 2, 3, 3.1, 3.2, 4, 5. In particular, D is adeviation risk functional if and only if A(Y ) = E(Y )−D(Y ) is anacceptability functional.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Summary
A = E−D D = E−Atranslation equivariant translation invariantdominated by expectation nonnegativeconcave convexpositively homogeneous positively homogeneousmonotonic w.r.t FSDmonotonic w.r.t. SSD
monotonic w.r.t. CXD (convex dominance)information monotonicity information antimonotonicity
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The primal and the dual view
I The primal view relates a risk functional to a decision problem
I The dual view relates the risk functional to a valuationproblem
If A is concave, then it has the representation using the concaveconjugate A+
A(Y ) = infE(Y Z )−A+(Z ) : Z ∈ Z.
If D is convex, then it has the representation using the convexconjugate D∗
D(Y ) = supE(Y Z )−D∗(Z ) : Z ∈ Z.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Superdifferentials for concave functionals
Fenchel’s inequality gives
A(Y ) +A+(Z ) ≤ E(Y Z ).
If, for some fixed Y , we find some Z , such that
A(Y ) +A+(Z ) = E(Y Z ),
we say that Z is a supergradient of A at Y . The set of allsupergradients is denoted by ∂A(Y ). It is a convex set. IfZ ∈ ∂A(Y ), then for all Y ′
A(Y ′) ≤ A(Y ) + E[(Y ′ − Y ) Z ].
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Subdifferentials for convex functionals
Fenchel’s inequality gives
D(Y ) +D+(Z ) ≥ E(Y Z ).
If, for some fixed Y , we find some Z , such that
D(Y ) +D+(Z ) = E(Y Z ),
we say that Z is a subgradient of D at Y . The set of allsubgradients is denoted by ∂D(Y ). It is a convex set. IfZ ∈ ∂D(Y ), then for all Y ′
D(Y ′) ≥ D(Y ) + E[(Y ′ − Y ) Z ].
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Portfolio optimization
Financial decisions have two dimensions: A value dimension, whichis measured by a location parameter of the profit distribution and arisk dimension, which is measured by a risk parameter. Typicallythe value dimension is expressed by the expectation E of the return.The risk dimension is measured by a translation-invariant deviationrisk functional D. Since there are many different deviation riskfunctionals, there are many ways of quantifying the risk dimension.The separation of the value dimension and the risk dimension leadsto a bi-objective decision problem. The goal is to find a decisionwhich leads to high value and small risk. However, one cannotmaximize return and minimize risk at the same time and somecompromise between the two goals has to be found. The relativeimportance of two goals for the decision maker is called the riskaversion. A typical risk averse decision maker wants to sacrificevalue for less risk, a risk neutral decision maker concentrates onvalue maximization and ignores risk.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Assume that the profit function is H(x , ξ), where x denotes thedecision and ξ denotes the random variables which influence theprofit. The decision x must belong to some decision space X .The general form of acceptability maximization
maxA[H(x , ξ)] : x ∈ X
does not allow to separate the value and the risk dimension and tointroduce the risk aversion parameter in an explicit way.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

If however D = E−A is considered as deviation functional, such aseparation can be achieved by considering both characteristics, Eand D separately. In principle there are three possible ways to dealwith these two contradicting objectives:
[I ] Maximize a risk-corrected expected return, i.e.maximize E− δD,
[II ] Minimize risk, given a lower limit for expected return,[III ] Maximize expectation, given an upper limit for the risk.
Notice that for a deviation functional, which was defined asD = E−A, the objective E− δD equals
(1− δ)E+ δA.
Here, δ is considered as a risk aversion parameter.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Thus risk aversion can be introduced by replacing the objective Aby the new objective (1− δ)E+ δA. Choosing δ < 1 will lead toriskier decisions and δ > 1 to safer decisions. It is just a matter oftaste, whether one starts with choosing the deviation riskfunctional D right away and looks at E− δD or if one defines theacceptability functional A first and looks at (1− δ)E+ δA. Ifδ = 0, only expectation maximization takes place. One could inprinciple also choose δ < 0, modeling risk seekers. For practicaldecision problems however, a positive risk aversion, i.e. δ > 0 istypical.Following the objective [I ], we formulate a class [I ]δ of problemsindexed by the risk aversion parameter δ ≥ 0.
[I ]δ
∥∥∥∥Maximize E[H(x , ξ)]− δD[H(x , ξ)]x ∈ X (1)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The family of problems (1) is closely related to the family ofproblems of type [II ]
[II ]µ
∥∥∥∥∥∥∥∥
Minimize D[H(x , ξ)]subject toE[H(x , ξ)] ≥ µx ∈ X
(2)
and of type [III ]
[III ]q
∥∥∥∥∥∥∥∥
Maximize E[H(x , ξ)]subject toD[H(x , ξ)] ≤ qx ∈ X .
(3)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Since the problems [II ] and [III ] are just mirror images of eachother, we will elaborate the relations between [I ] and [II ] only.Before doing so, let us show under which conditions theseproblems are concave resp. convex.Proposition. If either one of the following conditions is fulfilled
(A) A is concave and H is affine-linear in x , i.e.H(x , ξ) = x>ξ(1) + ξ(2),
(B) A is concave and isotonic w.r.t. ≺FSD and H is concave in x ,
then the objective A[H(x , ξ)] of [I ] is concave in x . Likewise, ifone of the following conditions are fulfilled
(A′) D is convex and H is affine-linear in x ,
(B ′) D is convex and antitonic w.r.t. ≺FSD and H is concave in x ,
then the objective D[H(x , ξ)] of [II ] is convex in x .
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Proposition. Assume that either condition (A) or (B) (orequivalently either (A′) or (B ′)) is fulfilled.
(i) Let δ > 0. If x∗δ is a solution of [I ]δ and µ = E[H(x∗δ , ξ)], thenx∗δ is a solution of [II ]µ.
(ii) Conversely, assume x∗µ is a solution of [II ]µ, but not a solutionof any [II ]µ′ , for µ′ < µ. Then there exists a δ > 0 such thatx∗µ is also a solution of [I ]δ.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Solving the problem [II ]µ for an appropriate range of µ leads to theefficient frontier function F
µ 7→ F (µ) = minD[H(x , ξ)] : E[H(x , ξ)] ≥ µ, x ∈ X, (4)
for the chosen risk deviation functional D. The efficient frontiervisualizes the possible optimal combinations of risk and expectedreturns for all risk aversion levels. If the function F is concave,then the marginal increase in expected return versus the marginalincrease in risk gets smaller for larger risk.Proposition. Suppose that the feasible set X is convex. Underthe assumption (A′) or (B ′), the efficient frontier function F isconcave.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Single-stage portfolio optimization
Suppose that M different investment possibilities are given. Letξ = (ξ(1), . . . , ξ(M))> be the vector of random returns per unit ofprice of these investments within some holding period. Letx = (x1, . . . , xM)> be the vector of holdings. The random value ofthe portfolio at the end of the holding period is a linear function ofx
Yx = H(x , ξ) = x> · ξ.Therefore the expected return is also linear in x
E(Yx) = (Eξ)> · x ≥ µ.
Also the budget constraint is linear in x ,
x1 + · · ·+ xM = 1l>M · x ≤ B.
Here the vector 1lM denotes the column vector of M entries withvalue 1. The asset holdings x may be non-negative or notconstrained in sign depending whether selling short is forbidden ornot. The budget B may be set to 1 without loss of generality.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The efficient frontier problem for single-stage portfoliooptimization is
[II ]µ
∥∥∥∥∥∥∥∥∥∥
Minimize D(x>ξ)(Eξ)> · x ≥ µ minimal expected return1l>M · x ≤ 1 budget constraint(x ≥ 0) shortselling constraint
(may be present or not)
(5)
A portfolio composition x is called efficient, if it is the solution of(5) for some µ.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Let the expected returns be rm = Eξ(m), m = 1, . . . , M. In additionto these risky investments, there is a risk-free asset (a bond orbank account) available, which has return r0. Denoting the weightsby x0 (for the risk-free asset) resp. x1, . . . , xM (for the otherassets), the random portfolio return is
Yx = x0r0 +M∑
m=1
xmξ(m) = x0r0 + Yx .
We form the vectors of expected returns
r =
r1...
rM
and r =
r0
r
=
r0r1...
rM
and the weight vectors
x =
x1...
xM
and x =
x0
x
=
x0
x1...
xM
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Risk is measured by a deviation functional D, which istranslation-invariant (D1), convex (D2) and positivelyhomogeneous (D4). By translation invariance, we have that
D(Yx) = D(x0r0 +M∑
m=1
xmξ(m)) = D(M∑
m=1
xmξ(m)) = D(Yx), (6)
i.e. the risk-free component x0 is ignored in the objective.The basic optimization model is
∥∥∥∥∥∥∥∥
Minimize D(Yx)subject tox0r0 + x>r = µ required expected return µx0 + x>1l = 1 budget constraint
(7)
where 1l is the column vector with entries 1 of length M. We knowthat this is a convex optimization problem under linear equalityconstraints.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Let D(x) = ∂xD(Yx) be the subdifferential set of D(Yx) w.r.t. x .Notice that because of the positive homogeneity of D
D(κx) = D(x) for κ > 0. (8)
To put it differently, the subgradient is constant on all raysoriginating from zero. Introducing the dual variables λ resp. γ forthe required expected return and the budget constraintrespectively, one obtains the necessary conditions for optimality
λr + γ1l ∈ D(x),
λr0 + γ = 0, x0r0 + x>r = µ, x0 + x>1l = 1.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Suppose that z ∈ RM is chosen in such a way that for some λ 6= 0,
λ(r − r01l) ∈ D(z). (9)
Then, denoting a solution of (7) by x∗(µ), one sees that therelation
x∗(µ) = κ(µ)z ,
must hold. Using the return equation
r0(1− κ(µ)1l>z) + κ(µ)r>z = µ
one finds κ(µ) and the final solution x∗ and the risk-freecomponent as
x∗(µ) =µ− r0
(r − r01l)>zz (10a)
x∗0 (µ) = 1− 1l>x∗(µ) =(r − µ1l)>z
(r − r01l)>z. (10b)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The structure of all efficient portfolios
Theorem: Two Fund Theorem. Let D be atranslation-invariant, convex, positive homogeneous deviationfunctional. If x (1)∗ and x (2)∗ are two different efficient portfolios inthe efficiency problem (7), then all other efficient portfolios can beobtained as affine combinations of these two.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

While any two different portfolios span the whole solution set ofefficient portfolios, there are two specific portfolios in this setwhich deserve more attention. The first is the risk-free portfolio(everything is invested in the risk-free asset), the second is themarket portfolio, where nothing is invested in the risk-free asset.Theorem: One Fund Theorem. For efficient portfolios in themodel (7), the following holds true: There is one portfolio x+,which contains no risk-free assets (called the market portfolio)such that all efficient portfolios are affine combinations of thisportfolio and the portfolio which consists of investing in therisk-free asset only.The efficient frontier for µ ≥ r0 can be calculated as follows: By
D(x∗(µ)) = D(µ− r0µ+ − r0
x+) =µ− r0µ+ − r0
D(x+),
the efficient frontier is a straight line connecting the points (0, r0)and (D(x+), µ+). Here µ+ is the expected return of the marketportfolio.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Discrete approximations
For numerical examples and practical solutions we work withdiscrete models, i.e. random variables which take only finitelymany possible values. Suppose that the probability vector(ξ(1), ξ(2), . . . , ξ(M))> takes values
ξs = (ξ(1)s , ξ
(2)s , . . . , ξ
(M)s )> with probability ps for s = 1, . . . , S .
S is the finite number of scenarios.Arrange the data in a [S ×M] matrix Ξ, where
Ξs,m = ξ(m)s , s = 1, . . . , S m = 1, . . . , M, (11)
and form the column vector p = (p1, . . . , pS)> of probabilities.The vector of expected returns r = Eξ is
r = Ξ> · p (12)
and the [M ×M] covariance matrix C = Cov(ξ) of the randomvector ξ is
C = Ξ> · diag(p) · Ξ− r · r>.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

If the scenarios come from random sampling or historic data, thenps = 1/S , for all s and therefore the above formulas reduce to
r = Eξ =1
SΞ>1lS ; C = Cov(ξ) =
1
SΞ> · Ξ− r · r>.
In the following, we will specify the choice of the deviation riskfunctional to
I the standard deviation
I the lower semi-standard deviation
I the mean absolute deviation
I the average value-at-risk deviation
I the value-at-risk deviation
I the distortion functional
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The standard deviation as a deviation risk functional
Std(Y ) =√E[(Y − EY )2].
The standard deviation is a convex and positively homogeneousdeviation risk functional, which has the dual representation
Std(Y ) = ‖Y − EY ‖2 = supE(Y Z ) : E(Z ) = 0,E(Z 2) ≤ 1
.
(13)The standard deviation is monotonic w.r.t. ≺CXD . However,mean-standard deviation models are not compatible with ≺FSD :For every δ > 0 one can find random variables Y (1), Y (2) such thatY (1) ≺FSD Y (2), but EY (1) − δStd(Y (1)) > EY (2) − δStd(Y (2)).Here is the construction: Let Y (1) take the values 0 and a > 0with probabilities 1− ε and ε respectively. Likewise let Y (2) takethe values 0 and b > a with probabilities 1− ε and ε respectively.Then Y (1) ≺FSD Y (2), butE[Y (1)]− δStd[Y (1)]− (E[Y (2)]− δStd[Y (2)]) =(a− b)ε− δ
√(a2 − b2)
√ε− ε2 > 0, if ε/(1− ε) < δ.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Standard deviation efficiency
Since the standard deviation is the square root of the variance, itdoes not matter, whether the variance or the standard deviation isconsidered as the objective function. In the following, the varianceis minimized, but the standard deviation is shown in the risk-returndiagrams.Recall that the variance resp. standard deviation criterion is notcompatible with ≺FSD and therefore ≺SSD . Thus optimizingportfolios with this criterion conflicts with utility theory and thismakes the standard deviation efficiency model questionable.Let Yx =
∑Mm=1 xmξ(m) denote the portfolio return. For the
moment, we assume that no risk-free asset is available. Thevariance of Yx is
Var(Yx) = x>Cx ,
where C is the M ×M covariance matrix of ξ.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The variance (standard deviation) minimization leads to the wellknown Markowitz model:
∥∥∥∥∥∥∥∥∥∥
Minimize x>Cxsubject tor>x ≥ µ minimal expected return µ1l>x ≤ 1 budget constraint(x ≥ 0) shortselling allowed/not allowed
(14)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

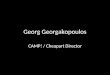
This is a quadratic program with linear constraints. The Markowitzmodel has become very popular, mostly due to the fact that it issimple and its complexity does not increase with the number ofscenarios. In fact, both for theoretical models and for discrete orsampled models, all one has to do is to calculate the covariancematrix and the mean returns first and use these parameters in theoptimization model.The figure on the next slide shows the standard deviation efficientfrontier in the upper part of the picture. The standard deviation asthe deviation risk functional is shown in the x-axis and return inthe y -axis. The lower part shows the composition of the optimalportfolios in the same risk scale as the efficient frontier above.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
1.001
1.002
1.003
1BO
2IT3UT
4FI
5RE
6CO
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.0450
0.2
0.4
0.6
0.8
1
1
6
Figure: The standard deviation efficient frontier. Portfolio weights areconstrained to be non-negative, i.e. selling short is not allowed.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

If the non-negativity constraints are dropped and all inequalitiesare changed to equalities in (14), we arrive at the famous capitalasset pricing model (CAPM), which is a special case of (7).
∥∥∥∥∥∥∥∥
Minimize x>Cxsubject tor>x = µ required expected return µ1l>x = 1 budget constraint.
(15)
For this model, an explicit solution can be found.Proposition. Assume that C is invertible and that r is not amultiple of 1l. Then the solution x∗(µ) of (15) is affine-linear in µand given by
x∗(µ) = µ[c
dC−1r − b
dC−11l] + [
a
dC−11l− b
dC−1r ], (16)
where
a = r>C−1r , b = r>C−11l,
c = 1l>C−11l, d = ac − b2. (17)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

In particular, the Two Fund Theorem holds. The characteristics ofthe efficient random return Yµ := x∗(µ)>ξ for a given requiredminimal return µ are
E(Yµ) = µ (by construction)
Var(Yµ) =µ2c − 2µb + a
d,
i.e. Var(Yµ) is a quadratic function in µ. The graph of theefficient frontier is a parabola.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0 2 4 6 8 10 12 14 16 18
x 10−4
1.0005
1.001
1.0015
1.002
1.0025
1.003
1.0035
1.004
1.0045
1BO
2IT
3UT
4FI
5RE
6CO
Variance
Figure: The variance efficient frontier. Portfolio weights may fallnegative. The efficient frontier function is a parabola.
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
1.001
1.002
1.003
1.004
1BO2IT
3UT4FI
5RE
6CO
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045−1
0
1
2
1
6
Std
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
1.001
1.002
1.003
1BO
2IT3UT
4FI
5RE
6CO
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.0450
0.2
0.4
0.6
0.8
1
1
6
Figure: The standard deviation efficient frontier. Left: Short positionsallowed. Right: Short positions not allowed. The efficient frontier is onlypiecewise parabolic.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Introducing a risk-free asset
If a risk-free asset is included in the set of possible investments,special cases of the Two Fund Theorem and the One FundTheorem will hold. The return r0 of the risk free is a constant, i.e.has variance 0.The extended vector of returns is
ξ =
r0ξ1...
ξM
.
We will characterize the risky part by a tilde, i.e.ξ = (ξ1, . . . , ξM)>. The return and covariance of the risky part isdenoted by r and C .The extended covariance matrix of ξ is
C =
0 0 · · · 00...0
C
and the extended vector of expected returns is
r =
(r0r
).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The CAPM decision problem including a risk-free asset is
∥∥∥∥∥∥∥∥
Minimize 12 x>C x
subject tor>x + r0x0 = µ1l>M x + x0 = 1
(18)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Proposition. For the model (18), the optimal solution is
x∗(µ) =1
q
((r − µ1l)>C−1(r − r01l)
(µ− r0)C−1(r − r01l)
),
whereq = (r − r01l)
>C−1(r − r01l).
All efficient portfolios are affine combinations of the risk-freeportfolio
10...0
and the market portfolio x+, where
x+ =
(0
C−1(r−r01l)
1l>C−1(r−r01l)
).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The expected return E(Yµ) of the optimal portfolio x∗(µ) is ofcourse equal to µ, its variance is
Var(Yµ) = x∗(µ)>Cx∗µ =(µ− r0)
2
(r − r01l)>C−1(r − r01l).
The standard deviation is a linear function in µ:
Std(Yµ) =√
x∗(µ)>Cx∗(µ) =µ− r0√
(r − r01l)>C−1(r − r01l).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Denote by Y+ = x>+ · ξ the return of the market portfolio. It hasexpectation
µ+ := E(Y+) = r>x+ =r>C−1(r − r01l)
1l>C−1(r − r01l).
Its variance is
σ2+ := Var(Y+) =
(r − r01l)>C−1(r − r01l)
[1l>C−1(r − r01l)]2.
If x is any portfolio, then
Cov(Yx , Y+) = x>Cx+ = x>(
0(r−r01l)
1l>C−1(r−r01l)
)=
x>(r − r01l)
1l>C−1(r − r01l).
Thus Cov(Yx , Y+) is a linear function in x . Using the fact thatE(Yx) = x> · r = x0r0 + x> · r , i.e.x>(r − r01lM) = E(Yx)− x0r0 − r0(1− x0) one gets an affine-linearrelation between Cov(Yx ,Y+) and E(Yx)
Cov(Yx ,Y+) =x>(r − r01l)
1l>C−1(r − r01l)=E(Yx)− x0r0 − (1− x0)r0
1l>C−1(r − r01l)
=E(Yx)− r0
1l>C−1(r − r01l).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Now, using the fact that
µ+ − r0σ2
+
=r>C−1(r − r01l)− r01l
>C−1(r − r01l)
1l>C−1(r − r01l)
1l>C−1(r − r01l)2
(r − r01l)>C−1(r − r01l)
= 1l>C−1(r − r01l),
we get the relation
E(Yx) = r0 +µ+ − r0
σ2+
Cov(Yx , Y+), (19)
or, denoting by β(x) := Cov(Yx , Y+)/σ2+ the regression coefficient
of the return of Yx w.r.t. the return Y+ of the market portfolio,one gets the fundamental equation
E(Yx) = r0 + β(x) · (µ+ − r0). (20)
The quantity β(x) is called the beta coefficient of the portfolio x .
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The CAPM model has the following properties.Proposition. For any portfolio x
(i) E(Yx) = r0 + β(x) · (µ+ − r0) withβ(x) = Cov(Yx , Y+)/Var(Y+).
(ii) Var(Yx) ≥(E(Yx )−r0
µ+−r0
)2σ2
+. Equality holds if and only if the
correlation Corr(Yx ,Y+) is 1, i.e. if the portfolio is efficient.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
1
1.001
1.002
1.003
1BO2IT
3UT4FI
5RE
7RF
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
−1
0
1
2
1
7
Std
market portfolio
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045
1
1.001
1.002
1.003
1BO2IT
3UT4FI
5RE
6CO
7RF
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.0450
0.2
0.4
0.6
0.8
1
1
7
Std
Figure: The standard deviation efficient frontier, a risk free asset isincluded. Left: Short positions allowed. Right: Short positions notallowed. The dotted line shows the efficient frontier, if the risk free assetis excluded. The star shows risk and return of the market portfolio.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The lower semi-standard deviation
The lower semi-standard deviation is
Std−(Y ) = ‖[Y − EY ]−‖2.
It was first introduced in risk management by Bawa (1975).The lower semi-standard deviation is a convex, pos. homogeneoustranslation invariant deviation risk measure. It has the conjugaterepresentation
Std−(Y ) = supE (YZ ) : Z = E(V )− V ,EV 2 ≤ 1,V ≥ 0.
The lower semi-standard deviation Std− has an importantadvantage over the semi-standard deviation: E− Std− iscompatible with ≺SSD : If Y ≺SSD Y ′, then
E(Y )− Std−(Y ) ≤ E(Y ′)− Std−(Y ′).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Lower standard deviation efficiency
The Std− efficient frontier is the solution of the followingparametric program∥∥∥∥∥∥∥∥∥∥
Minimize (in x) : E[([x>ξ − E(x>ξ)]−)2]subject to(Eξ)>x ≥ µ1l>Mx ≤ 1(x ≥ 0)
(21)
The discrete version of (21) is a quadratic program with linearconstraints ∥∥∥∥∥∥∥∥∥∥∥∥∥∥
Minimize (in x and z)∑S
s=1 psz2s
subject tozs ≥ x>r − x>ξs s = 1, . . . ,Sr>x ≥ µ1l>Mx ≤ 1z ≥ 0x ≥ 0
(22)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0.01 0.02 0.03 0.04 0.05 0.061
1.005
1.01
1BO
2IT
3UT4FI
5RE
6CO
0.01 0.02 0.03 0.04 0.05 0.06
0
0.5
1
1
6
0.01 0.02 0.03 0.04 0.05 0.061
1.005
1.01
1.015
1BO
2IT
3UT4FI
5RE
6CO
0.01 0.02 0.03 0.04 0.05 0.060
0.2
0.4
0.6
0.8
1
1
6
Figure: The efficient frontier and the composition of the Std− efficientportfolios. Left: short positions allowed. Right: Short positions notallowed.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The mean absolute deviation
Mad(Y ) = E[|Y − EY |].It was introduced in risk management by Konno and Yamazaki(1991). The mean absolute deviation is a convex, positivehomogeneous deviation risk functional.
Mad(Y ) = sup E[Y (V − EV )] : ‖V ‖∞ ≤ 1= supE(Y Z ) : EZ = 0;∃a s.t. ‖Z − a‖∞ ≤ 1
and,
E(Y )− δMad(Y ) = infE(Y Z ) : EZ = 1;∃a s.t. ‖Z − a‖∞ ≤ δ= infE(Y Z ) : EZ = 1;∃a, 1− 2δ ≤ a ≤ 1 s.t. a ≤ Z ≤ a + 2δ.(23)
For 0 ≤ δ ≤ 1/2, E(Y )− δMad(Y ) is monotonic w.r.t. ≺FSD .Notice that Mad(Y ) = E|Y − EY | = 2E([Y − EY ]−).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Mean absolute deviation efficiency
For Mad(Y ) = E|Y − EY | = 2E([Y − EY ]−), the efficientfrontier is found by∥∥∥∥∥∥∥∥∥∥
Minimize (in x) : 2E([x>ξ − E(x>ξ)]−)subject to(Eξ)>x ≥ µ1l>Mx ≤ 1(x ≥ 0).
(24)
The discrete equivalent version of (24) is∥∥∥∥∥∥∥∥∥∥∥∥∥∥
Minimize (in x and z) : 2p>zsubject tozs ≥ x>r − x>ξs s = 1, . . . ,Sr>x ≥ µ1l>Mx ≤ 1z ≥ 0(x ≥ 0)
(25)
This is a linear program with M + S variables and S + 2 linearconstraints, plus the nonnegativity constraints.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0.005 0.01 0.015 0.02 0.025 0.03
1.001
1.002
1.003
1.004
1BO2IT
3UT4FI
5RE
6CO
0.005 0.01 0.015 0.02 0.025 0.03
−1
0
1
2
1
6
Mad
0.005 0.01 0.015 0.02 0.025 0.03
1.001
1.002
1.003
1BO
2IT3UT
4FI
5RE
6CO
0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1
6
Mad
Figure: The efficient frontier and the composition of the Mad efficientportfolios. Left: Short positions allowed. Right: Short positions notallowed.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The average value-at-risk
Definition: The average value-at-risk. The averagevalue-at-risk at level α, 0 < α ≤ 1 of Y is defined as
AV@Rα(Y ) = AV@RαG =1
α
∫ α
0G−1(u) du (26)
= −∫ 0
−∞min(G (u)/α, 1) du +
∫ ∞
0max(1− G (u)/α, 0) du,
where G is the distribution function of Y . The averagevalue-at-risk deviation is
AV@RDα(Y ) = EY − AV@Rα(Y ). (27)
The average value-at-risk is also known under the names ofconditional value-at-risk (CVaR), tail value-at-risk (TVaR) andexpected shortfall.Notice that
AV@R1(Y ) =
∫ 1
0G−1(u) du = EY
and that for α ∈ (0, 1)
EY = αAV@Rα(Y )− (1− α)AV@R1−α(−Y ). (28)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Alternate representations of AV@R
Theorem.
(i) The average value-at-risk may be represented as the optimalvalue of the following optimization problem
AV@Rα(Y ) = maxx − 1
αE([Y − x ]−) : x ∈ R (29)
(see Rockafellar and Uryasev (2000)). The maximum in (29)is attained.
(ii) The dual representation of AV@Rα(Y ) is
AV@Rα(Y ) = minE(Y Z ) : EZ = 1, 0 ≤ Z ≤ 1/α. (30)
The minimum in (30) is attained. Thus AV@Rα is a concaveu.s.c. functional.
(iii) Another representation is
AV@Rα(Y ) = G−1(α)− 1
αE([Y − G−1(α)]−) (31)
= G−1(α)− 1
α
∫ G−1(α)
∞(G−1(α)− u) dG (u).
(iv) A conditional tail expectation representation is
AV@Rα(Y ) =α−GαE[Y |Y < G−1(α)]+
α− α−Gα
G−1(α). (32)
(v) Another conditional tail expectation representation is
AV@Rα(Y ) =α+
G
αE[Y |Y ≤ G−1(α)]−α+
G − α
αG−1(α). (33)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The average value-at-risk enjoys the following important properties.Proposition.The average value-at-risk AV@Rα, 0 < α ≤ 1 is
(i) translation-equivariant (A1),
(ii) concave (A2),
(iii) isotonic w.r.t. SSD (A3.2)
(iv) positively homogenous (A4),
(v) strict (A5), i.e. the average value-at-risk deviation AV@RDα
is non-negative.
(vi) Lipschitz continuous on L1,
(vii) comonotone additive.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The property (iii) can be inverted.Proposition. The relation Y (1) ≺SSD Y (2) holds if and only if
AV@Rα(Y (1)) ≤ AV@Rα(Y (2))
for all 0 < α ≤ 1.It makes sense, to extend the definition of the AV@Rα to the caseα = 0. The ”correct” extension is
AV@R0(Y ) := ess inf Y = infx : GY (x) > 0 = limp↓0
G−1Y (p),
(34)since the following proposition holds.Proposition. Let Y be integrable and nonconstant. The mappingα 7→ AV@Rα(Y ), α ∈ (0, 1] is continuous and monotonicallyincreasing. Moreover,
AV@R0(Y ) = ess inf Y = limα↓0AV@Rα(Y ). (35)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Average value-at-risk deviation efficiency
Let the deviation risk functional be the AV@RDα = E− AV@Rα.Since
AV@Rα(Y ) = maxa− 1
αE([Y − a]−) : a ∈ R
the corresponding efficient frontier is calculated with the followingprogram∥∥∥∥∥∥∥∥∥∥
Minimize (in x and a) : E(x>ξ)− a + 1αE([x>ξ − a]−)
subject to(Eξ)>x ≥ µ1l>Mx ≤ 1(x ≥ 0)
(36)The discrete version is a linear program
∥∥∥∥∥∥∥∥∥∥∥∥
Minimize (in x , a and z) x>r − a + 1αp>z
subject to−a + x>ξs + zs ≥ 0 s = 1, . . . ,Sr>x ≥ µ1l>Mx ≤ 1z ≥ 0, (x ≥ 0)
(37)Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
1.001
1.002
1.003
1.004
1BO2IT
3UT4FI
5RE
6CO
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08−1
0
1
2
1
6
AVaRD0.1
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
1.001
1.002
1.003
1BO2IT
3UT4FI
5RE
6CO
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.080
0.5
1
1
6
AVaRD0.1
Figure: The efficient frontier and the composition of the [email protected]
efficient portfolios. Left: Short positions allowed. Right: Short positionsnot allowed.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

The value-at-risk and the value-at-risk deviation
V@Rα(Y ) = G−1Y (α) is related to the average value-at-risk by the
relationship (??) and by
V@Rα(Y ) = G−1(α) ≥ 1
α
∫ α
−∞G−1(p) dp = AV@Rα(Y ) (38)
for all α ∈ (0, 1). Moreover, it has the following properties.Proposition. The value-at-risk V@Rα is
(i) translation-equivariant (A1),
(ii) isotonic w.r.t. FSD (A3.1),
(iii) positively homogenous (A4),
(iv) comonotone additive,
(v) not isotonic w.r.t. SSD
(vi) not concave.
The value-at-risk deviation is defined as
V@RDα(Y ) = EY − V@Rα(Y ).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Value-at-risk deviation efficiency
The V@RD-optimization problem is∥∥∥∥∥∥∥∥∥∥
Minimize (in x) : x>E(ξ)− V@Rα(x>ξ)subject to(Eξ)>x ≥ µ1l>Mx = 1(x ≥ 0).
(39)
In general, this is a nonconvex and therefore hard optimizationproblem. The discrete version of the V@RD problem reads
∥∥∥∥∥∥∥∥∥∥∥∥
Minimize (in x and t) : x>r − tsubject tor>x ≥ µ
t ≤ x>ξ(s) for at least dαSe indices s ∈ 1, 2, . . . ,S1l>Mx ≤ 1(x ≥ 0)
(40)which is a mixed-integer linear program. Its complexity increasesrapidly with the number S of scenarios and can therefore be solvedonly for small S . Alternate solution methods are based onapproximations, including smoothing and DC approximation. Ourfigure is based on a new unpublished iterative algorithm based onlocal concave approximations of the V@RD function. Notice thatbecause the assumptions for concavity are not fulfilled, the efficientfrontier is nonconcave. But it is still monotonic.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0.04 0.06 0.08 0.1 0.12 0.14 0.16
1
1.005
1.01
1.015
1.02
1.025
1BO2IT
3UT 4FI
5RE
6CO
0.04 0.06 0.08 0.1 0.12 0.14 0.16−2
−1
0
1
2
3
1
6
0.04 0.06 0.08 0.1 0.12 0.14 0.161
1.005
1.01
1.015
1BO
2IT
3UT4FI
5RE
6CO
0.04 0.06 0.08 0.1 0.12 0.14 0.160
0.2
0.4
0.6
0.8
1
1
6
Figure: The efficient frontier and the composition of the [email protected] efficientportfolios. Left: Short positions allowed. Right: Short positions notallowed.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Distortion acceptability functionals
Let G be the distribution function of Y andG−1(p) = supu : G (u) ≤ p. Let J be monotonic on [0, 1].The distortion acceptability functional is defined as
AJG =
∫ 1
0G−1(p) dJ(p).
AJ is concave, if J is concave. Special cases are:I The expectation. E(Y ) =
∫ 10 G−1 dp
I The value-at-risk V@Rα(Y ) = G−1(α) (is not concave)I The average value-at-risk (conditional value-at-risk, tail
value at risk, expected shortfall)
AV@Rα(Y ) =1
α
∫ α
0G−1(p) dp
I Power distortion. J(p) = pr 0 < r < 1I Wang distortion. J(p) = Φ(Φ−1(p + λ)) λ > 0
Concave functionals can be represented as infima of distortionfunctionals (Kusuoka, 2001).
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

History of distortion functionals: Deneberg(1965), Yaari (1987),Wang (2000), Acerbi (2002), Cerny (2006).
0 10
1
J
G(0) −3 −2 −1 0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
(original df.)(distorted df.)
0
G
H(G)
Left: a distortion function J. Right: a distorted distribution function
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

Distortion efficiency
Let AJ(Y ) =∫ 10 G−1(u) dJ(u), where J(p) =
∫ p0 j(q) dq for a
monotonically decreasing j , i.e. a concave j . The pertainingdeviation functional is DJ(Y ) = E(Y )−AJ(Y ). If J(1) = 1, thenDJ is non-negative.Let Yx = ξ>x . The efficient frontier for the risk functional DJ canbe found by solving the following optimization problem for all q,for which the solution is nonempty.
∥∥∥∥∥∥∥∥∥∥
Maximize (in x) : (Eξ)>xsubject toAJ [Yx ] ≥ q1l>Mx ≤ 1(x ≥ 0).
(41)
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems

0.02 0.04 0.06 0.08 0.1 0.12 0.14
1
1.01
1.02
1.03
1BO2IT3UT
4FI
5RE
6CO
0.02 0.04 0.06 0.08 0.1 0.12 0.14
−2
−1
0
1
2
3
1
6
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.111
1.005
1.01
1.015
1BO
2IT
3UT4FI
5RE
6CO
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 0.110
0.2
0.4
0.6
0.8
1
1
6
Figure: The efficient frontier and the composition of the efficientportfolios for the distortion risk deviation DJ = E−AJ , whereJ(u) = u0.1. Left: Short positions allowed. Right: Short positions notallowed.
Georg Ch. Pflug Introduction to Stochastic Optimization Part 2: Formulation of single-stage portfolio optimization problems