Embed Size (px)
Citation preview

i
ESTUDIO TEORICO Y EXPERIMENTAL DE LOS DRIVES UTILIZADOS
PARA EL CONTROL DE MOTORES DE CORRIENTE CONTINUA DE
EXCITACION SEPARADA Y MOTORES DE INDUCCION
MILTON RUBEN ASPRILLA QUINTERO
HELBERT ALEXIS MORENO RODRIGUEZ
CORPORACION UNIVERSITARIA AUTONOMA DE OCCIDENTE
DIVISION DE INGENIERIAS
INGENIERIA ELECTRICA
SANTIAGO DE CALI
1999
ii
ESTUDIO TEORICO Y EXPERIMENTAL DE LOS DRIVES UTILIZADOS
PARA EL CONTROL DE MOTORES DE CORRIENTE CONTINUA DE
EXCITACION SEPARADA Y MOTORES DE INDUCCION
MILTON RUBEN ASPRILLA QUINTERO
HELBERT ALEXIS MORENO RODRIGUEZ
DIRECTOR
ENRIQUE CIRO QUISPE OQUENA
INGENIERO ELECTRICISTA.
CORPORACION UNIVERSITARIA AUTONOMA DE OCCIDENTE
DIVISION DE INGENIERIAS
INGENIERIA ELECTRICA
SANTIAGO DE CALI
1999
TESIS DE GRADO PRESENTADA COMO
REQUISITO PARA OPTAR EL TITULO DE
INGENIEROS ELECTRICISTAS.
iii
ACEPTACION
Cali 10 de Diciembre de 1999
Aprobado por el comité de trabajo de grado
en cumplimiento de los requisitos exigidos
por la Corporación Universitaria
Autónoma de Occidente para optar al
titulo de Ingenieros Electricistas.
Ing. Hebert González
Jurado Ing. Rosaura Castrillón
Jurado
iv
AGRADECIMIENTOS
Ha sido para nosotros satisfactorio contar en el desarrollo de este proyecto
con el apoyo profesional de las siguientes personas:
ENRIQUE CIRO QUISPE OQUEÑA, Ingeniero Electricista y jefe del área de
maquinas eléctricas de la Corporación Autónoma de Occidente.
YURI ULIANOV LOPEZ CASTRILLON, Ingeniero Electricista, docente de
circuitos eléctricos y coordinador de la rama estudiantil IEEE en la
Corporación Universitaria Autónoma de Occidente.
ARLEY PALACIOS, Operador de red de sistemas en la Corporación
Universitaria Autónoma de Occidente.
DIEGO SMITH, Arquitecto de la Universidad San Buenaventura y operador
de red de sistemas Corporación Universitaria Autónoma de Occidente.
v
DEDICATORIA
Esta tesis va dedicada a la memoria de mi abuela CLARISA BELTRAN quien
con su amor ha sido la persona más importante en mi formación personal.
A mi madre GUIOMAR QUINTERO quien con su esfuerzo, amor y entereza
ha sustentado y ha hecho posible la realización de mi carrera profesional.
A mi hermana KAREN LIZETH quien es mi consentida y es la dueña de todo
mi cariño. De ella espero que siga mis pasos y que ojalá sea mucho mejor
que yo. También merecen mi más especial dedicación mi padre LIBARDO
ASPRILLA y mi abuela ARACELLY HINESTROZA, y el resto de familia que
han esperado mucho de mí. Debo mencionar en esta dedicatoria a mi novia
LILIANA quien ha estado muy cerca a mí de manera sentimental, a mi
compañero de tesis ALEXIS MORENO a quien admiro profundamente y
además es mi mejor amigo.
MILTON R.ASPRILLA Q.
vi
DEDICATORIA
A mis padres ELBERT y NELLY quienes llevaron por amor a limites extremos
su paciencia compresión y apoyo no solo en los momentos que dedique a la
culminación de este trabajo, sino durante toda mi vida.
A ALEXANDRA y TATI a quienes debo el cariño aprecio y ternura de
hermanas.
A mis amigos Milton, Fanny, Edith, Albita, Beatriz, Henry, Yuri, Jaime,
Enrique. A la Rama Estudiantil de IEEE de la Corporación Universitaria
Autónoma de Occidente, al EPJ XXIV y a los que fueron mis profesores de
Ingenieria Eléctrica.
A la familia GUZMAN BITAR, quienes me enseñaron el verdadero amor del
PADRE.
vii
Especialmente dedicado a NATALIA:
No ha sido necesario un juramento de amor para guardar la promesa.....
No ha sido necesario tenerle de nuevo a mi lado, para llevar conmigo
siempre su presencia.....
ALEXIS MORENO RODRIGUEZ
viii
CONTENIDO
Pág.
INTRODUCCIÓN 1
1. MODELAMIENTO DE SISTEMAS MECÁNICOS 4
1.1 INTRODUCCIÓN 4
1.2 PRINCIPIOS DE MECÁNICA 6
1.3 CARACTERÍSTICAS MECÁNICAS DE LAS CARGAS Y LOS
MOTORES 12
1.3.1 Clasificación de las cargas de acuerdo a sus características 14
1.3.1.1 Característica mecánica independiente de la velocidad 14
1.3.1.2 Característica mecánica linealmente dependiente de
la velocidad 15
1.3.1.3 Característica con dependencia no lineal de la velocidad 15
1.3.1.4 Característica con dependencia descendente de la velocidad
de acuerdo a sus características 16
1.3.2 Clasificación de los motores de acuerdo a sus características 21
ix
1.3.2.1 Característica absolutamente rígida 21
1.3.2.2 Característica rígida 22
1.3.2.3 Característica suave 22
1.4 ESTABILIDAD Y PUNTOS DE OPERACIÓN 23
1.5 POTENCIA Y ENERGÍA 28
1.6 CUADRANTES DE OPERACIÓN 32
1.6.1 Régimen de frenado recuperativo 36
1.6.2 Régimen de frenado a contracorriente 36
1.6.3 Régimen de frenado dinámico 37
2. MODELAMIENTO DE MOTORES DE CORRIENTE CONTINUA DE
EXCITACION SEPARADA 39
2.1 INTRODUCCIÓN 39
2.2 CIRCUITO MAGNÉTICO DE UNA MAQUINA D.C 40
2.3 GENERACIÓN DE TORQUE Y VOLTAJE 49
2.4 CIRCUITO EQUIVALENTE DE UN MOTOR D.C
DE EXCITACIÓN SEPARADA 54
2.5 REGÍMENES ENERGÉTICOS 64
2.5.1 Régimen de frenado recuperativo 65
2.5.2 Régimen de frenado a contracorriente 67
2.5.3 Régimen de frenado dinámico 70
3. MODELAMIENTO DE MOTORES DE INDUCCION 73
3.1 INTRODUCCIÓN 73
3.2 CAMPO MAGNÉTICO GIRATORIO 74
x
3.3 DEVANADOS DISTRIBUIDOS Y FUERZA MAGNETOMOTRIZ 80
3.4 DEMOSTRACIÓN ANALÍTICA DEL CAMPO MAGNÉTICO
GIRATORIO 93
3.5 COMPORTAMIENTO MAGNÉTICO DE LA MAQUINA DE
INDUCCIÓN 100
3.6 CIRCUITO EQUIVALENTE DE UN MOTOR DE INDUCCIÓN 107
3.6.1 Condiciones de vacío y carga 114
3.6.2 Descripción de las características mecánicas 117
3.7 ACERCAMIENTO AL COMPORTAMIENTO DEL MOTOR
DE INDUCCIÓN DESPRECIANDO LA IMPEDANCIA DEL
ESTATOR 123
3.8 REGÍMENES DE FUNCIONAMIENTO DEL MOTOR
DE INDUCCIÓN 127
3.8.1 Régimen de frenado recuperativo 131
3.8.2 Régimen de frenado a contracorriente 133
3.8.3 Régimen de frenado dinámico 136
4. CONTROL DE VELOCIDAD DE LOS MOTORES D.C DE
EXCITACION SEPARADA 139
4.1 INTRODUCCIÓN 139
4.2 ZONAS DE TRABAJO A POTENCIA CONSTANTE Y
TORQUE CONSTANTE 140
4.3 CONTROL DE VOLTAJE POR MEDIO DE CONVERTIDORES
C.A – C.D 143
xi
4.3.1 Variación del voltaje con convertidores duales 164
4.3.2 Operación de un convertidor dual en funcionamiento por
mando conjunto 171
4.3.3 Variación del voltaje por medio de convertidores C.D – C.D 177
4.4 CONTROL DEL FLUJO MAGNÉTICO DE EXCITACIÓN 197
4.5 CONTROL REOSTATICO 202
5. CONTROL DE VELOCIDAD DE LOS MOTORES DE INDUCCION 206
5.1 INTRODUCCIÓN 206
5.2 VARIACIÓN DEL VOLTAJE DEL ESTATOR 208
5.2.1 Utilización de los controladores del voltaje de C.A 213
5.2.2 Controlador trifásico bidireccional 218
5.2.3 Construcción de características mecánicas y de frenado 224
5.3 VARIACIÓN DE LA FRECUENCIA 229
5.3.1 Ley de variación de la frecuencia y el voltaje 233
5.3.2 Variación con carga independiente de la velocidad 235
5.3.3 Variación con carga con dependencia descendente de la
Velocidad 236
5.3.4 Variación con carga con dependencia no lineal de la velocidad 237
5.3.5 Funcionamiento de los onduladores 237
5.3.5.1 Principio de operación de los onduladores 237
5.3.5.2 Onduladores trifásicos 240
5.3.6 Control PWM 245
5.3.6.1 Principio del control PWM 246
xii
5.3.6.2 Modulación senoidal 251
5.4 ESTRUCTURA Y FUNCIONAMIENTO DE UN CONVERTIDOR
DE FRECUENCIA CON TENSIÓN IMPUESTA Y CONTROL PWM 253
5.5 CONTROL DE LA CORRIENTE DE ESTATOR 255
5.6 CONVERTIDOR DE FRECUENCIA CON CORRIENTE IMPUESTA 260
5.6.1 Funcionamiento del ondulador autónomo 261
5.7 MÉTODOS DE ACELERACIÓN Y FRENADO DEL
ACCIONAMIENTO 266
5.7.1 Cambio del sentido de giro 272
CONCLUSIONES 274
BIBLIOGRAFIA 281
ANEXOS 283
PRACTICAS SUGERIDAS PARA MANEJO DE MOTORES DE
CORRIENTE CONTINUA 286
PRACTICAS SUGERIDAS PARA MANEJO DE MOTORES DE
INDUCCION 294
xiii
LISTA DE FIGURAS
Pág.
FIGURA 1.1 Sistema traslacional sobre el que actúan 2 fuerzas. 6
FIGURA 1.2 Sistema mecánico traslacional sobre el que actúan
las fuerzas ejercidas por un resorte un amortiguado
y una fuerza externa.
9
FIGURA 1.3 Sistema mecánico rotacional simple. 11
FIGURA 1.4 Curvas de características mecánicas de las cargas. 14
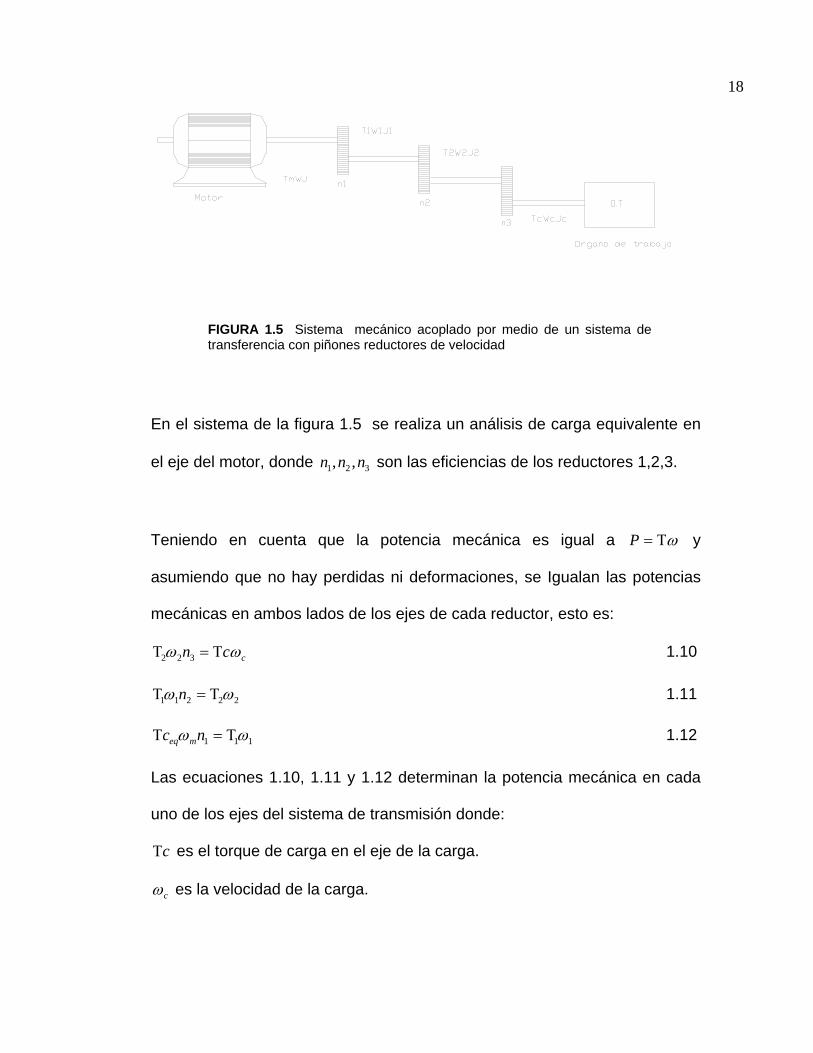
FIGURA 1.5 Sistema mecánico acoplado por medio de un
sistema de trasferencia con piñones reductores de
la velocidad.
18
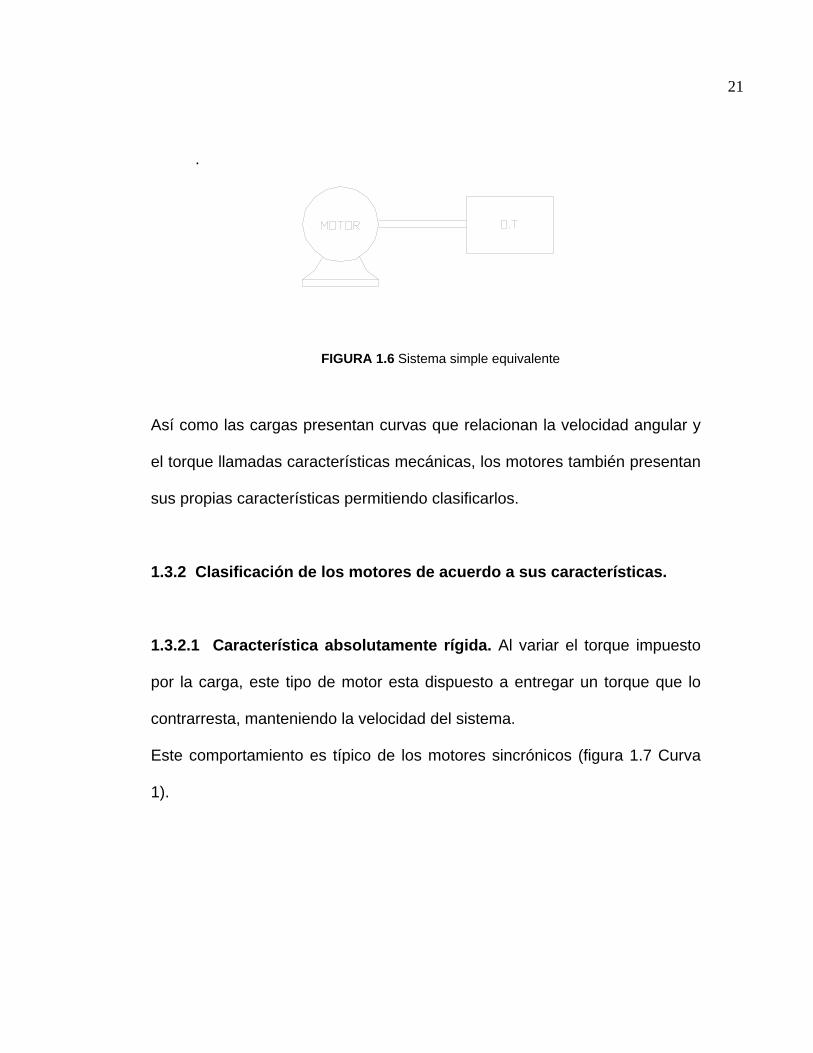
FIGURA 1.6 Sistema mecánico simple equivalente. 21
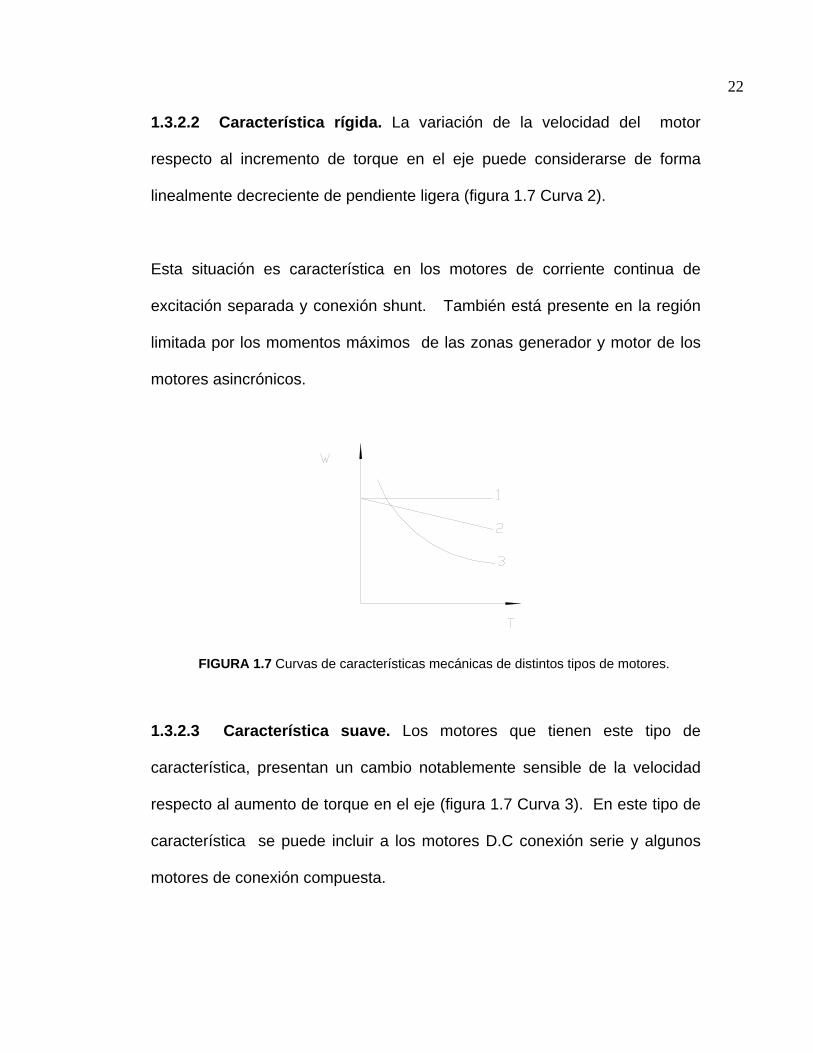
FIGURA 1.7 Curvas de características mecánicas de distintos
tipos de motores.
22
FIGURA 1.8 Intersección de las curvas características del motor
y de la carga en el punto de operación.
23
xiv
FIGURA 1.9 Curvas de sistemas mecánicos estable inestable y
de estabilidad neutra.
27
FIGURA 1.10 Curva característica de un motor de inducción
funcionando inicialmente con una carga L1 y
seguidamente con una carga L2 acoplada a su eje.
29
FIGURA 1.11 Curva característica de un motor de inducción
funcionando con una carga L3 acoplada a su eje.
29
FIGURA 1.12 Sistema mecánico rotacional en el que interactuan
los torques de carga y motor.
31
FIGURA 1.13 Sistema mecánico rotacional en el que se
almacena energía potencial a medida que se
presente variación del ángulo .
33
FIGURA 1.14 Cuadrantes de operación en los que puede
funcionar un sistema mecánico.
34
FIGURA 1.15 Diagramas de flujo de potencia de un motor que
funciona en los regímenes de frenado, cortocircuito
y vacío.
38
FIGURA 2.1 Corte transversal de un motor de corriente directa. 41
FIGURA 2.2 Curva de saturación magnética del hierro. 43
FIGURA 2.3 Maquina D.C de cuatro polos magnéticos. 43
FIGURA 2.4 Conductores alojados en la ranura del rotor
pertenecientes al devanado del rotor o armadura.
44
xv
FIGURA 2.5 Conexiones del devanado e armadura de una
maquina de dos polos y 6 ranuras en el rotor.
46
FIGURA 2.6 Densidad del flujo magnético al rededor de los
conductores de la parte superior e inferior del rotor.
47
FIGURA 2.7 En esta posición del rotor la corriente que circula
por cada uno de los ramales es 2ai .
48
FIGURA 2.8 Lamina cilíndrica imaginaria de material conductor. 50
FIGURA 2.9 Fuerzas actuando sobre la lamina de cobre
bañadas por una densidad de campo B.
51
FIGURA 2.10 Circuito equivalente de un motor D.C de excitación
separada.
55
FIGURA 2.11 Característica de velocidad con los puntos de corte
velocidad de vacío 0 y corriente de cortocircuito
acci .
60
FIGURA 2.12 Característica mecánica con lo s puntos de corte
velocidad de vacío 0 y torque de cortocircuito cc .
61
FIGURA 2.13 Curvas características de un motor de corriente
continua a l varia su resistencia de armadura.
63
FIGURA 2.14 Régimen de frenado recuperativo de un motor de
D.C.
66
FIGURA 2.15 Régimen de frenado a contracorriente de un motor 68
xvi
D.C.
FIGURA 2.16 Régimen de frenado a contracorriente e inversión
de giro de un motor D.C.
69
FIGURA 2.17 Régimen de frenado dinámico de un motor D.C. 70
FIGURA 2.18 Características del régimen de frenado dinámico. 72
FIGURA 3.1 Sistema trifásico de tensiones con desfase de 120
grados.
74
FIGURA 3.2 Disposición de las bobinas en el estator de un
motor de inducción.
76
FIGURA 3.3 a) Diagrama fasorial de los sistemas de flujo,
voltajes y corrientes. B) disposición de bobinas en
el estator y formas de corrientes en el tiempo.
78
FIGURA 3.4 Densidad del campo magnético en el estator en el
tiempo 1t .
79
FIGURA 3.5 Densidad de campo magnético en el estator en el
tiempo 2t .
79
FIGURA 3.6 Densidad de campo magnético en el estator en el
tiempo 3t .
80
FIGURA 3.7 Rotación del campo magnético dentro de un motor
de inducción.
81
FIGURA 3.8 Estator y rotor de un motor de inducción de jaula de
ardilla.
82
xvii
FIGURA 3.9 a) Trayectoria del campo magnético en el espacio
b) Sentido de la corriente en una bobona de dos
conductores c) Formación de los polos magnéticos
en una bobina.
85
FIGURA 3.10 Distribución de la fuerza magnetomotriz de un
devanado de capa sencilla con dos bobinas por
polo.
88
FIGURA 3.11 Densidad total del campo magnético. 91
FIGURA 3.12 Lamina cilíndrica conductora que reemplaza el
devanado por fase de un motor girando a una
velocidad s .
96
FIGURA 3.13 Composición fasorial de la corriente . mi . 99
FIGURA 3.14 Diagrama espacial de las magnitudes del motor de
inducción.
106
FIGURA 3.15 Circuito equivalente de un motor de inducción. 107
FIGURA 3.16 Diagrama fasorial de la maquina de inducción sin
carga.
114
FIGURA 3.17 Diagrama fasorial de la maquina de inducción con
carga.
115
FIGURA 3.18 Circuito equivalente del motor de inducción para un
voltaje de entrada y flujo constante.
119
FIGURA 3.19 Característica mecánica del motor de inducción. 121
xviii
FIGURA 3.20 Variación de las características mecánicas del
motor por medio de la variación de resistencia del
rotor.
123
FIGURA 3.21 Circuito equivalente del rotor alimentado desde una
fuente imaginaria rE .
123
FIGURA 3.22 Circuito equivalente del estator. 128
FIGURA 3.23 Diagrama fasorial del circuito equivalente del motor
visto desde el estator.
129
FIGURA 3.24 Zonas de funcionamiento del motor de inducción. 129
FIGURA 3.25 Diagrama fasorial del motor de inducción
funcionando en la zona de generador.
132
FIGURA 3.26 Cuadrantes de operación del motor de inducción. 133
FIGURA 3.27 Diagrama fasorial del motor de inducción
funcionando en la zona de freno.
134
FIGURA 3.28 Freno a contracorriente y cambio del sentido de
giro del motor de inducción.
135
FIGURA 3.29 Circuito de fuerza para la conexión del frenado
dinámico del motor de inducción.
137
FIGURA 3.30 Esquemas de conexión del motor de inducción para
frenado dinámico.
138
FIGURA 4.1 Curvas de torque y potencia constante contra
velocidad.
142

xix
FIGURA 4.2 a) circuito de fuerza del convertidor de media onda.
b) Circuito equivalente del convertidor de media
onda.
145
FIGURA 4.3 a) Sistemas de voltajes trifásicos. b) Voltaje de
salida del convertidor de media onda. c) Corriente
de salida del convertidor. d) Corriente del tiristor t1.
147
FIGURA 4.4 Voltaje promedio ideal que entrega el convertidor. 148
FIGURA 4.5 Curvas de voltaje de entrada, corriente de salida y
voltaje de salida del convertidor de media onda.
150
FIGURA 4.6 Estado de conmutación en un convertidor de media
onda.
151
FIGURA 4.7 a) Circuito de fuerza de un convertidor trifásico en
puente. b) Circuito equivalente un convertidor en
puente. c) Voltaje de salida de un convertidor en
puente.
157
FIGURA 4.8 Circuito equivalente del convertidor de media y
onda completa.
158
FIGURA 4.9 Características mecánicas de los convertidores de
media y onda completa.
159
FIGURA 4.10 Voltajes y corrientes en las zonas. a) Corrientes
discontinuas. b) corrientes continuas.
163
FIGURA 4.11 Cuadrantes de operación de convertidores no 164
xx
reversibles.
FIGURA 4.12 a) Circuito de fuerza de un convertidor dual. b)
Cuadrantes de operación de un convertidor dual.
166
FIGURA 4.13 Características mecánicas y de velocidad de un
convertidor dual con mando separado.
167
FIGURA 4.14 Circuito equivalente de un convertidor dual. 169
FIGURA 4.15 Curvas de voltajes de los convertidores duales 01V ,
02V y corriente circulante ci .
170
FIGURA 4.16 a) Circuito de convertidor dual alimentando un
motor con una carga acoplada a su eje. b) gráficas
de operación en cuatro cuadrantes de un sistema
convertidor – motor – carga.
173
FIGURA 4.17 Configuración del circuito de pulsador. a) Con
interruptor. b) con un tiristor.
178
FIGURA 4.18 Curvas de voltaje y corriente del motor D.C durante
los periodos de cierre y apertura del interruptor S1.
179
FIGURA 4.19 Curvas de voltaje y corriente del motor D.C con
pulsador en zona discontinua.
185
FIGURA 4.20 Características mecánicas y de velocidad del motor
D.C con pulsador.
186
FIGURA 4.21 Cuadrante de operación de un pulsador clase A. 186
FIGURA 4.22 Configuración de un pulsador clase C. 188
xxi
FIGURA 4.23 Gráficas de corriente de salida en el tiempo con
diferentes niveles de corriente promedio para un
valor determinado de ciclo de trabajo.
189
FIGURA 4.24 Cuadrantes de operación del pulsador clase C. 192
FIGURA 4.25 Características mecánicas y de velocidad del
pulsador clase C.
192
FIGURA 4.26 Configuración de un pulsador de cuatro cuadrantes
clase E.
193
FIGURA 4.27 Cuadrantes de operación el pulsador clase E. 195
FIGURA 4.28 Características mecánicas y de velocidad del
pulsador clase E.
196
FIGURA 4.29 Control del flujo magnético por medio de un
convertidor.
198
FIGURA 4.30 Características mecánicas del motor D.C y control
por flujo.
201
FIGURA 4.31 Control reostático del motor D.C. 203
FIGURA 4.32 Circuito de control reostático del motor D.C.
mediante la conexión de pasos de resistencia.
205
FIGURA 5.1 Características mecánicas del motor de inducción
con variación del voltaje de estator.
210
FIGURA 5.2 Controlador del voltaje monofásico con tiristores
conectados en antiparalelo en la fase A.
213
xxii
FIGURA 5.3 Formas de onda de voltaje de entrada de la fase a,
voltaje de salida y corriente de la carga, con un
controlador monofásico con conexión en
antiparalelo.
217
FIGURA 5.4 Controlador trifásico bidireccional con un motor con
conexión Y.
219
FIGURA 5.5 Controlador trifásico bidireccional con una carga
resistivo–inductiva, con ángulo de disparo 45 y
120 .
223
FIGURA 5.6 Curvas características del armónico fundamental
del voltaje en función de los ángulos , y S.
225
FIGURA 5.7 Características mecánicas del motor de inducción
con control de voltaje de estator, con variación del
ángulo de disparo a de los tiristores.
227
FIGURA 5.8 Conexión del motor de inducción con un
controlador de voltaje en configuración para cambio
de secuencia.
228
FIGURA 5.9 Circuito equivalente de los motores de inducción
donde las resistencias de la rama de magnetización
y del rotor son despreciadas.
231
FIGURA 5.10 Variación de las características mecánicas del
motor de inducción de acuerdo a la ley de la
238
xxiii
frecuencia y el voltaje. a) Carga constante. b)
Carga tipo de creciente. c) carga tipo ventilador.
FIGURA 5.11 Ondulador monofásico en puente. 239
FIGURA 5.12 Ondulador monofásico conectado a un motor de
inducción.
241
FIGURA 5.13 Circuitos equivalentes del motor cuando se realiza
el proceso de encendido de los tiristores.
242
FIGURA 5.14 Onda de salida de un ondulador traficó. a) voltaje
de línea de la fase A. b) Voltaje de fase de la fase
A. c) Corriente de carga inductiva.
243
FIGURA 5.15 Ondulador conectado a la fase A. 246
FIGURA 5.16 Modulación por ancho de pulso mediante la
comparación de dos señales.
247
FIGURA 5.17 Variaron del índice de pulsación estableciendo las
diversas zonas de trabajo del ondulador.
249
FIGURA 5.18 Modulación senoidal generando voltaje de línea y
de fase.
252
FIGURA 5.19 Estructura del convertidor de frecuencia con
tensión impuesta.
253
FIGURA 5.20 Características mecánicas del motor de inducción
controlando la corriente de estator.
258
FIGURA 5.21 Características mecánicas del motor de inducción 259
xxiv
controlando corriente y voltaje de estator.
FIGURA 5.22 Estructura de un convertidor con corriente impuesta
con un ondulador autónomo.
260
FIGURA 5.23 Ondulador autónomo con el motor modelado por
fuentes de voltaje e inductancias.
262
FIGURA 5.24 Circuito equivalente entre las fases A y B en estado
de conmutación.
264
FIGURA 5.25 Torque pulsante con armónicos de sexto orden en
control del motor con corriente impuesta.
266
FIGURA 5.26 Curva de torque y corriente magnetizante contra la
velocidad.
268
FIGURA 5.27 Aceleración del motor de inducción mediante el
incremento de la frecuencia.
268
FIGURA 5.28 Frenado del motor disminuyendo la frecuencia y
devolviendo energía a la red.
270
FIGURA 5.29 Frenado del rotor a deslizamiento nulo, con la
frecuencia y torque igual a cero.
272
FIGURA 5.30 Cambio e giro del motor de inducción utilizando las
zonas I II y III.
273
xxv
RESUMEN DE LA TESIS
El proyecto de grado: ESTUDIO TEORICO EXPERIMENTAL DE DRIVES DE
MOTORES DE CORRIENTE DIRECTA DE EXCITACIÓN SEPARADA Y
MOTORES DE INDUCCION, es un resumen en el que se recopilan los
aspectos fundamentales de la teoría de variación de velocidad de motores de
corriente continua de excitación separada así como también aspectos
relacionados con el método escalar de variación de velocidad de maquinas
de inducción.
Como aspecto principal de la teoría de variación de velocidad de maquinas
de corriente continua se destaca el método de control de velocidad por medio
de la variación del voltaje de armadura a través de dispositivos
semiconductores tales como el puente rectificador y los pulsadores. En lo
referente al control de velocidad de maquinas de inducción se efectúa un
análisis teórico de la variación de velocidad por medio del cambio del valor
de la frecuencia de la maquina, teniendo en cuenta que la relación V/f se
xxvi
mantenga constante con el fin de que el valor del flujo sea constante y no se
pierda torque motor.
Además de la teoría de variación de velocidad en motores, se realiza un
análisis del comportamiento en los cuatro cuadrantes de operación de un
sistema electromecánico DRIVE – MOTOR – CARGA, con lo que se realiza
una experiencia práctica relacionada con el control de velocidad de un motor
de inducción por medio de un drive MICROMASTER de SIEMENS.
Al final del texto se efectúan recomendaciones para la implementación de un
moderno laboratorio de control de velocidad de maquinas en la
CORPORACION UNIVERSITARIA AUTONOMA DE OCCIDENTE.
INTRODUCCION
En el ámbito industrial los procesos productivos han alcanzado altos niveles
de desarrollo gracias a los avances obtenidos en la creación de dispositivos
semiconductores en electrónica de potencia y a la implementación de
microprocesadores de alta capacidad de computo en que funcionan de
acuerdo a un software adecuado para la operación eficiente de cada
proceso.
Los maquinas eléctricas como parte fundamental de los procesos industriales
que involucran el movimiento de diversos mecanismos, también han sido
involucrados en el desarrollo de las áreas anteriormente mencionadas, con la
implementación de sistemas electrónicos que permiten la variación de su
velocidad.
Los accionamientos eléctricos constituidos por un sistema motor y un
mecanismo de transmisión adquieren mayor versatilidad con la adecuación
2
de convertidores electrónicos que le permiten controlar, convertir y dirigir de
manera adecuada la energía eléctrica necesaria en el proceso de
producción. Por lo anterior la velocidad variable ha sido una necesidad
cubierta por los convertidores electrónicos, representando grandes utilidades,
gasto apropiado de energía y un aprovechamiento optimo de la materia
prima.
La aplicación en motores de corriente continua de estos convertidores
permite la conversión de señal de corriente alterna en una señal de corriente
continua que se aplica al motor y cuyo valor promedio puede ser variado
mediante un proceso de rectificación controlado. En la aplicación a los
motores de inducción de corriente alterna los convertidores también realizan
un proceso de rectificación de la señal alterna de entrada, pero luego
mediante un circuito ondulador se entrega al motor una señal alterna de
frecuencia variable.
En este texto el objetivo principal es dar una base teórica y experimental del
funcionamiento del conjunto convertidor-motor-carga. En el desarrollo del
primer capitulo de este texto se repasan algunos principios de mecánica y se
analiza el comportamiento de las características mecánicas de los motores
funcionando con las respectivas cargas. El modelado del motor de corriente
directa de excitación separada y el motor de inducción se tratan en los
capítulos 2 y 3 respectivamente. En los capítulos 4 y 5 se realiza un estudio
3
de los circuitos electrónicos que componen los convertidores electrónicos
que componen los convertidores y su forma de actuar sobre las
características de los motores. La ultima parte de este texto se dedica a dos
practicas realizadas con dos convertidores electrónicos, anotando los datos
y conclusiones obtenidos en cada una de ellas.
4
MODELAMIENTO DE SISTEMAS MECANICOS
1.1 INTRODUCCION
Este primer capítulo presenta un análisis de los conceptos fundamentales de
la dinámica del movimiento circular, el cual es característico de gran parte de
las maquinas de tipo industrial. Se inicia también el estudio de los elementos
básicos que constituyen un accionamiento, tales como el motor, los
mecanismos de transmisión y los órganos de trabajo o cargas.
El motor es el encargado de mover el sistema mecánico conformado por los
tres elementos anteriormente mencionados. En este capitulo se tratan solo
las características mecánicas de salida (velocidad y torque) y regímenes de
trabajo de algunas clases de ellos, dejando los análisis más complejos de
otras de sus características para posteriores capítulos.
El mecanismo de transmisión tiene como tarea fundamental, conectar al
motor con la carga, de modo que de las características mecánicas de salida
5
del motor, tales como velocidad y torque se conserven o varíen.
La carga esta relacionada con el trabajo final requerido. Por ejemplo, subir o
bajar personas con un ascensor. En este caso las personas representan la
carga y la acción subir o bajar, el trabajo que tiene que realizar el sistema
que es el ascensor.
De las cargas aquí se estudian los diversos tipos y sus principales
características. Es preciso tener en cuenta que hay diferentes disposiciones
de elementos en un sistema mecánico. Estas se dividen de la siguiente
forma:
En grupo: Cuando un solo motor actúa sobre varios órganos de trabajo
mediante un mecanismo de transmisión complejo.
Individual: Cuando un solo motor actúa con una sola carga.
Multimotor: Varios motores actúan sobre un solo órgano de trabajo.
Una característica importante de los sistemas mecánicos individual o en
grupo, es que pueden ser reducidos a sistemas compuestos por un solo
motor y una carga, sobre los cuales recae la mayor parte del análisis de esta
sección.
6
1.2 PRINCIPIOS DE MECANICA
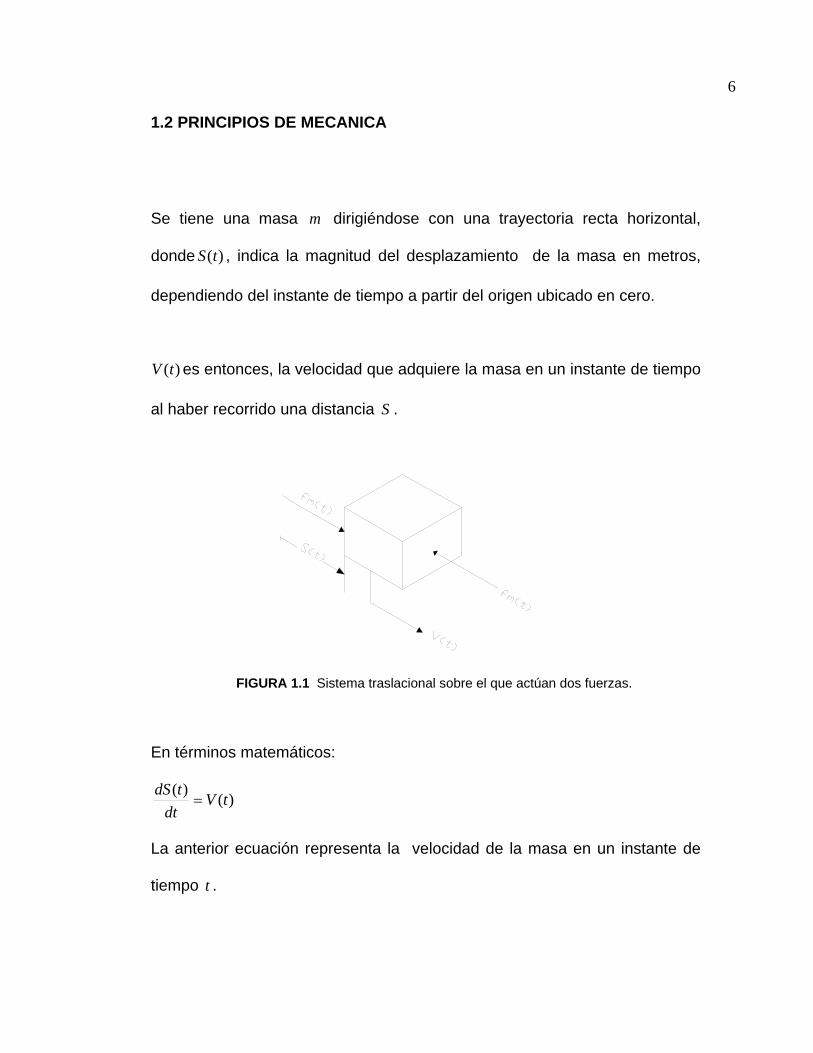
Se tiene una masa m dirigiéndose con una trayectoria recta horizontal,
donde )(tS , indica la magnitud del desplazamiento de la masa en metros,
dependiendo del instante de tiempo a partir del origen ubicado en cero.
)(tV es entonces, la velocidad que adquiere la masa en un instante de tiempo
al haber recorrido una distancia S .
En términos matemáticos:
)()(
tVdt
tdS
La anterior ecuación representa la velocidad de la masa en un instante de
tiempo t .
FIGURA 1.1 Sistema traslacional sobre el que actúan dos fuerzas.
7
Sea )(tFm una función dependiente del tiempo que corresponde a la fuerza
motriz aplicada a la masa en la dirección de su desplazamiento )(tS .
)(tFc es la función dependiente del tiempo que tiene que ver con la fuerza de
carga, la cual se opone al movimiento y solo se presenta cuando es aplicada
la fuerza )(tFm .
La masa entonces, desarrolla aceleración en el sentido del desplazamiento
cuando )(tFm es mayor que )(tFc . La aceleración de la masa se produce en
el sentido contrario al desplazamiento1 cuando )(tFm es menor que )(tFc .
Por leyes de newton se puede verificar lo anterior en la Ecuación 1.1.
dt
tSdmtFctFm
)()()(
2
1.1
Donde m es la masa del cuerpo y )()()(2
tadt
tdv
dt
tsd , es la aceleración del
cuerpo.
El producto dt
tSdm
)(2
, es la fuerza resultante entre las fuerzas )(tFm y )(tFc .
1 Se desacelera la masa. (Nota de los autores)
8
La Ecuación 1.1 es una ecuación diferencial de segundo orden respecto a la
función )(tS , pero esta expresión se puede escribir como una ecuación de
primer orden respecto a la velocidad )(tV así:
dt
tdVmtFctFm
)()()( 1.2
En la Ecuación 1.1 se espera que la respuesta sea una función que describe
la magnitud del desplazamiento en un instante de tiempo cualquiera,
mientras que en la Ecuación 1.2 la función de respuesta, es la velocidad
respecto al tiempo.
Las Ecuaciones 1.1 y 1.2 permiten entonces entender la interacción de las
fuerzas actuantes en un cuerpo, además de las respuestas de
desplazamiento o velocidad respecto al tiempo.
Cuando el producto dt
tSdm
)(2
es igual a cero, es por que la fuerza motriz
)(tFm iguala a la fuerza de carga )(tFc , en otros términos, el cuerpo esta en
equilibrio, es decir, inmóvil o con velocidad constante.
Se asume el sistema de la figura 1.2

9
dt
tSdmtkS
dt
tdSbtFm
)()(
)()(
2
1.3
En este sistema mecánico de movimiento traslacional, la fuerza )(tFc
(Ec.1.1), es la suma de la fuerza ejercida por el resorte dt
tdSb
)( y la fuerza
realizada por el amortiguador )(tkS . Acomodando la Ecuación 1.3 se tiene
que:
)()()(
)(2
tkSdt
tdSb
dt
tSdmtFm 1.4
Donde b es la constante del amortiguador y cuya fuerza resistente dt
tdSb
)(
adoptara valores en función del tiempo, dependiendo de la variación del
desplazamiento.
FIGURA 1.2 Sistema mecánico traslacional sobre el que actúan las fuerzas ejercidas por un resorte, un amortiguador y una fuerza externa.
10
k es la constante de elasticidad del resorte, la cual, multiplicada por el
desplazamiento, da como resultado la fuerza resistente ejercida por el
resorte.
En la ecuación diferencial 1.4, la fuerza motriz )(tFm es una fuerza de
excitación del sistema y bien podría tener forma de escalón, impulso, rampa,
etc. Cuando la fuerza motriz de excitación )(tFm es aplicada al sistema, se
espera una función de respuesta de desplazamiento )(tS de la masa
dependiente del tiempo. La respuesta es una función cuya forma depende
del tipo de fuerza de excitación aplicado al sistema, y también de los
parámetros de amortiguamiento, masa y elasticidad del resorte.
En el análisis anterior se ha considerado una masa que se mueve en línea
recta. Para el caso en que un cuerpo de masa m se mueva en forma
rotacional, que es lo más común en motores eléctricos, ya no se considera
un desplazamiento rectilíneo, si no angular, representado por un ángulo )(t ,
el cual varia en el tiempo según la ecuación 1.5
)()(
tdt
td 1.5
La ecuación anterior describe la velocidad angular como función del tiempo,
la cual puede ser constante o cambiar respecto al mismo, en cuyo caso se
produce la aceleración angular descrita por la ecuación 1.6.
11
)()(
tdt
td 1.6
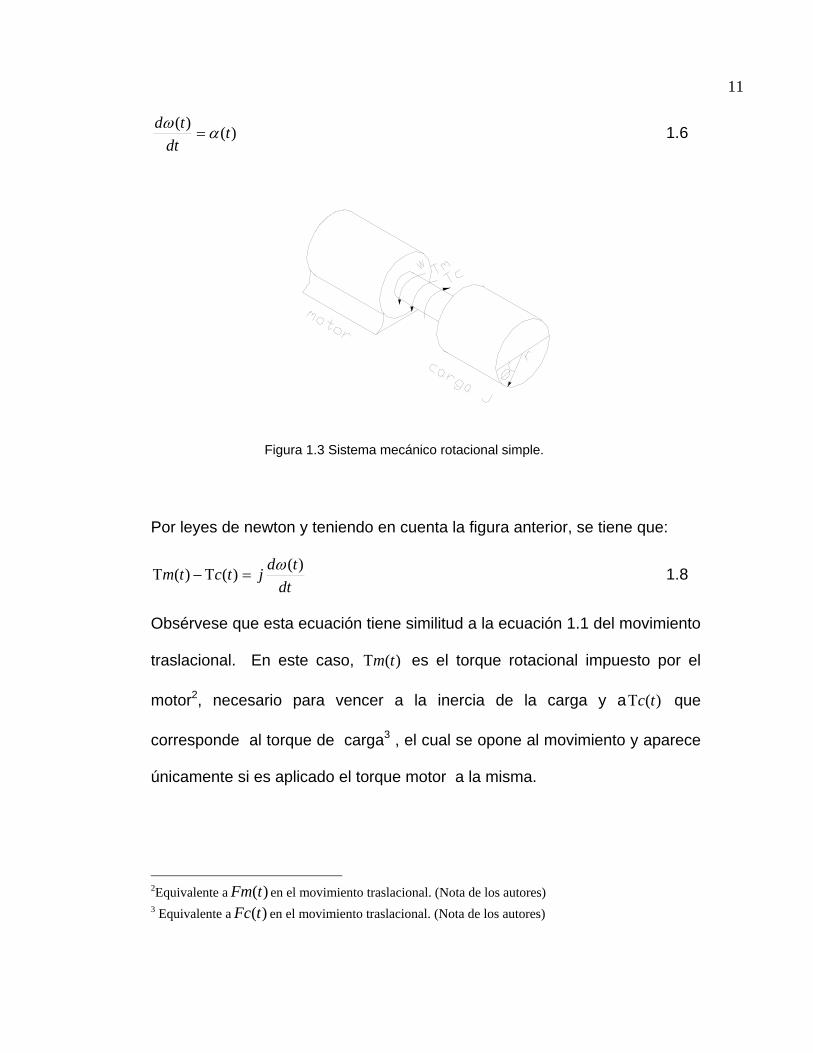
Por leyes de newton y teniendo en cuenta la figura anterior, se tiene que:
dt
tdjtctm
)()()(
1.8
Obsérvese que esta ecuación tiene similitud a la ecuación 1.1 del movimiento
traslacional. En este caso, )(tm es el torque rotacional impuesto por el
motor2, necesario para vencer a la inercia de la carga y a )(tc que
corresponde al torque de carga3 , el cual se opone al movimiento y aparece
únicamente si es aplicado el torque motor a la misma.
2Equivalente a )(tFm en el movimiento traslacional. (Nota de los autores) 3 Equivalente a )(tFc en el movimiento traslacional. (Nota de los autores)
Figura 1.3 Sistema mecánico rotacional simple.
12
j es una característica de la masa, llamada momento de inercia y es
apreciable para el motor, solo cuando la carga esta rotando.
Se considerará en un análisis posterior de este sistema, que las magnitudes
que estén en sentido de giro antihorario son positivas.
El signo de la velocidad angular , está dado por el sentido en que aumenta
el ángulo , que es el mismo sentido en que gira el eje del sistema.
La aceleración angular dt
td )( está determinada por el sentido de giro del eje
y depende del aumento o disminución de la velocidad angular )(t .
El torque )(tm en la figura 3, es positivo de acuerdo con el sentido en que el
motor imprime su fuerza. Siempre estará en esta dirección, aunque el eje gire
en sentido contrario, circunstancia que se presenta cuando )(tc (cuyo
sentido es negativo) es mayor en magnitud que )(tm .
1.3 CARACTERÍSTICAS MECÁNICAS DE LAS CARGAS Y LOS
MOTORES
13
Para iniciar el estudio de las características mecánicas de los motores y las
cargas, se dará una definición de lo que representa una carga en un sistema.
Una carga es una restricción impuesta en contra de que se genere
movimiento. En la industria, las cargas se manifiestan en forma de
ventiladores, ascensores, grúas, transportadores, tornos, bombas, etc.
Se requiere de un análisis gráfico del comportamiento torque contra
velocidad, para determinar las características mecánicas y conocer su
clasificación.
Del estudio experimental de las cargas, surge una expresión que explica el
comportamiento que cada una presenta cuando es sometida a distintos
valores de velocidad angular. No es el objetivo principal profundizar en como
se obtuvo esta expresión o demostrarla, sin embargo se dará de ella una
breve descripción:
x
nocnoc
)( 1.9
c : Es el torque resistente a una determinada velocidad de rotación .
x : Es el exponente que describe el comportamiento del torque resistivo al
variar la velocidad del sistema.
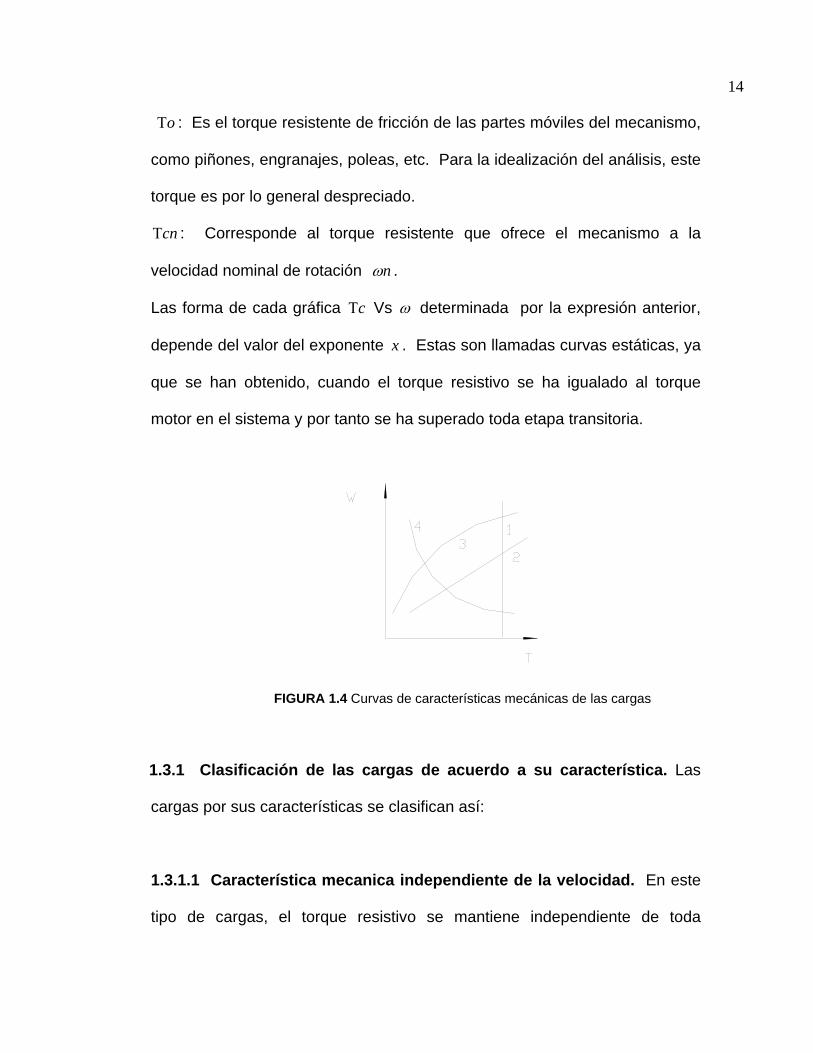
14
o : Es el torque resistente de fricción de las partes móviles del mecanismo,
como piñones, engranajes, poleas, etc. Para la idealización del análisis, este
torque es por lo general despreciado.
cn : Corresponde al torque resistente que ofrece el mecanismo a la
velocidad nominal de rotación n .
Las forma de cada gráfica c Vs determinada por la expresión anterior,
depende del valor del exponente x . Estas son llamadas curvas estáticas, ya
que se han obtenido, cuando el torque resistivo se ha igualado al torque
motor en el sistema y por tanto se ha superado toda etapa transitoria.
1.3.1 Clasificación de las cargas de acuerdo a su característica. Las
cargas por sus características se clasifican así:
1.3.1.1 Característica mecanica independiente de la velocidad. En este
tipo de cargas, el torque resistivo se mantiene independiente de toda
FIGURA 1.4 Curvas de características mecánicas de las cargas
15
variación de la velocidad de rotación , por tanto el exponente x de la
ecuación que describe su comportamiento es cero (figura 1.4 Curva 1).
A este tipo de característica pertenecen las grúas, bombas, ascensores,
maquinas herramientas, maquinas transportadoras de masa fija y algunas
cargas cuyo torque resistivo de fricción no varia considerablemente a
velocidades nominales de trabajo.
1.3.1.2 Característica mecánica linealmente dependiente de la velocidad.
En esta característica la variación del torque de carga respecto a la
velocidad de rotación es lineal. Un ejemplo típico de esta característica, es el
de un generador D.C. de excitación independiente con carga resistiva
constante en sus terminales de salida. El valor que adopta el exponente x es
1. (Ver figura 1.4, curva 2)
1.3.1.3 Característica con dependencia no lineal de la velocidad.
Algunas cargas requieren el ingreso necesario de potencia mecánica con el
fin de mover un fluido o contrarrestar fricción de tipo aerodinámica. Ello
ocasiona que su torque resistivo varíe con el cuadrado de la velocidad de
rotación, arrojando una característica de forma parabólica. A este grupo
pertenecen las bombas, las hélices, los compresores, etc. Estas maquinas
también son llamadas mecanismos con momento de ventilación.
16
Aunque no son muy comunes, dentro del conjunto de cargas con
característica no lineal también pertenecen aquellas cuyo comportamiento es
descrito por una curva de grado superior. En este caso el exponente x es
mayor o igual a 2 (figura 1.4, Curva 3).
1.3.1.4 Característica con dependencia descendente de la velocidad. En
esta característica, la variación del torque resistente se hace muy sensible al
incremento de la velocidad, cambiando siempre en forma descendente. Con
relación al producto entre el torque y la velocidad, la potencia requerida se
mantiene constante4. La curva descrita por este tipo de carga obedece a un
exponente x igual a menos 1 (-1) en la mayoría de los casos (figura1.4 Curva
4).
Las cargas más representativas de este tipo son tornos, fresadoras y algunas
maquinas herramientas.
El torque resistente descrito en las curvas características anteriores,
representa la exigencia mínima que cada carga realiza al motor que la
moverá, para ser arrastrada desde su velocidad nula hasta un punto de
trabajo en equilibrio.
4 El producto no cambia desde =0 hasta n .(Nota de lo autores).
17
Hasta aquí se han visto las respuestas de salida Torque Vs Velocidad
ofrecidas por algunas cargas directamente acopladas a la fuente de potencia
mecánica.
En muchas ocasiones el acople de una carga al motor, no se hace a través
de su eje, debido a que ésta requiere de otras condiciones de velocidad y
torque. Es entonces cuando se usan algunos elementos móviles de
transmisión como engranajes, poleas, correas etc. Los cuales varían la
característica mecánica vista por el motor, complicando el análisis del
sistema y requiriendo un método que permita encontrar el torque resistente y
el momento de inercia de la carga en el punto de referencia que es el eje del
motor.
De los resultados posteriores a este análisis, se selecciona el motor
necesario que inyectará potencia mecánica al sistema.
Para obtener un equivalente de torque e inercia en el eje del motor se
realiza un análisis físico del sistema mecánico, el cual depende del tipo de
transferencia entre el motor y la carga que se esté analizando.
18
En el sistema de la figura 1.5 se realiza un análisis de carga equivalente en
el eje del motor, donde 321 ,, nnn son las eficiencias de los reductores 1,2,3.
Teniendo en cuenta que la potencia mecánica es igual a P y
asumiendo que no hay perdidas ni deformaciones, se Igualan las potencias
mecánicas en ambos lados de los ejes de cada reductor, esto es:
ccn 322 1.10
22211 n 1.11
111 nc meq 1.12
Las ecuaciones 1.10, 1.11 y 1.12 determinan la potencia mecánica en cada
uno de los ejes del sistema de transmisión donde:
c es el torque de carga en el eje de la carga.
c es la velocidad de la carga.
FIGURA 1.5 Sistema mecánico acoplado por medio de un sistema de transferencia con piñones reductores de velocidad
19
21, son los torques entre los mecanismos reductores.
21, son las velocidades de los ejes entre mecanismos reductores.
eqc es el torque de carga referenciado al eje del motor.
m es la velocidad angular en el eje del motor.
Siendo la eficiencia total del sistema el producto de las eficiencias, se tiene
que:
nnnn 321
Si el eje del motor es el punto de referencia, la función de torque equivalente
respecto del torque de carga queda:
an
c
n
cc
c
meq
1.13
a: es la relación de velocidades del sistema de transmisión.
Considerando la energía cinética de un sistema que gira como:
2
2
1 jEk
Para hallar el momento de inercia del sistema se debe considerar la igualdad
de energía cinética entre el sistema equivalente y el sistema real, compuesto
por la energía acumulada en el motor mas la energía del sistema de
transferencia. (Ecuación 1.14).
sismeq EkEkEk

20
2222
211
22
2
1
2
1
2
1
2
1
2
1cmmmeq jcjjjj 1.14
De acuerdo a la relación de velocidad en cada uno de los engranajes se
tiene:
a
a
a
mc
m
m
22
11
1.15
La energía total del sistema de transmisión es igual a la energía acumulada
en el sistema equivalente menos la energía en el motor. Remplazando las
ecuaciones 1.15 en la ecuación 1.14 se obtiene:
Donde tj es el momento de inercia del sistema de transmisión mas el de la
carga.
meqt jjj
En términos generales:
i
x i
ict a
j
a
jj
122
1.16
Las ecuaciones 1.13, 1.14, 1.15 1.16 y 1.17, permiten convertir sistemas
mecánicamente complejos a un sistema simple equivalente, tal como el que
se muestra en la figura 1.6.
222
221
1
a
j
a
j
a
jj ct
21
.
Así como las cargas presentan curvas que relacionan la velocidad angular y
el torque llamadas características mecánicas, los motores también presentan
sus propias características permitiendo clasificarlos.
1.3.2 Clasificación de los motores de acuerdo a sus características.
1.3.2.1 Característica absolutamente rígida. Al variar el torque impuesto
por la carga, este tipo de motor esta dispuesto a entregar un torque que lo
contrarresta, manteniendo la velocidad del sistema.
Este comportamiento es típico de los motores sincrónicos (figura 1.7 Curva
1).
FIGURA 1.6 Sistema simple equivalente
22
1.3.2.2 Característica rígida. La variación de la velocidad del motor
respecto al incremento de torque en el eje puede considerarse de forma
linealmente decreciente de pendiente ligera (figura 1.7 Curva 2).
Esta situación es característica en los motores de corriente continua de
excitación separada y conexión shunt. También está presente en la región
limitada por los momentos máximos de las zonas generador y motor de los
motores asincrónicos.
1.3.2.3 Característica suave. Los motores que tienen este tipo de
característica, presentan un cambio notablemente sensible de la velocidad
respecto al aumento de torque en el eje (figura 1.7 Curva 3). En este tipo de
característica se puede incluir a los motores D.C conexión serie y algunos
motores de conexión compuesta.
FIGURA 1.7 Curvas de características mecánicas de distintos tipos de motores.
23
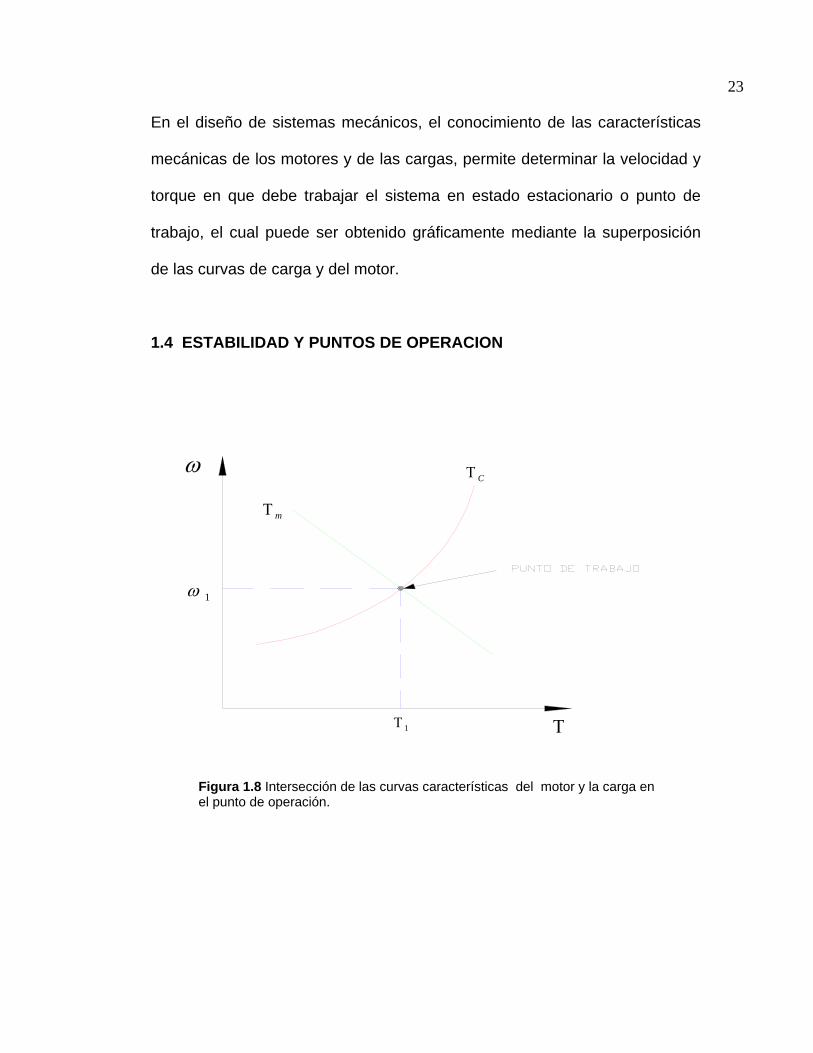
En el diseño de sistemas mecánicos, el conocimiento de las características
mecánicas de los motores y de las cargas, permite determinar la velocidad y
torque en que debe trabajar el sistema en estado estacionario o punto de
trabajo, el cual puede ser obtenido gráficamente mediante la superposición
de las curvas de carga y del motor.
1.4 ESTABILIDAD Y PUNTOS DE OPERACION
1
m
C
1
Figura 1.8 Intersección de las curvas características del motor y la carga en el punto de operación.
24
Como anteriormente se ha intentado esclarecer, el termino régimen
permanente5 se refiere a la condición en que el sistema mecánico esta
trabajando en equilibrio, es decir que el torque motor y el torque de carga son
iguales a un valor constante, mientras el sistema se mueve también a
velocidad constante 1 . Ambos valores están determinados por el punto de
intersección de las curvas características en un plano de variables torque y
velocidad.
Las condiciones necesarias para que el sistema este en régimen permanente
son:
0)()( 11 mC
0)(
dt
td Es decir es constante
Gráficamente el equilibrio del sistema se puede apreciar en la intersección de
las curvas características mecánicas del motor y de la carga en la figura 1.8.
El punto de trabajo determina también, la potencia suministrada por el motor
a la carga haciendo el producto del torque y la velocidad.
La estabilidad es la medida en que un sistema responde a la variación de
algún parámetro o perturbación. Un buen nivel de estabilidad permite que un
5 En algunos textos es denominado régimen estacionario
25
sistema, regrese a su condición inicial de equilibrio o a un estado de
equilibrio diferente.
Para dar una explicación mas exacta de lo que representa la estabilidad en
un sistema mecánico, es necesario definir un parámetro importante
denominado Rigidez Mecánica K, el cual determina que tanto varía la
diferencia entre los torques de carga y el motor, , respecto de una
variación ligera de la velocidad desde 1 hasta 1 .
K donde mc 1.17
Con el fin de determinar un valor constante de K en el análisis, es preciso
linealizar las curvas de torque motor y torque de carga, respecto del punto de
equilibrio (figura 1.9). Por lo general en sistemas reales el valor de K varia de
acuerdo a la variación de .
Cuando ocurre un disturbio que hace que la velocidad del sistema se
incremente de forma ligera aparece en el eje de transferencia un torque
dinámico d , el cual se opone o contribuye a la estabilización del sistema.
t
jd 1.18
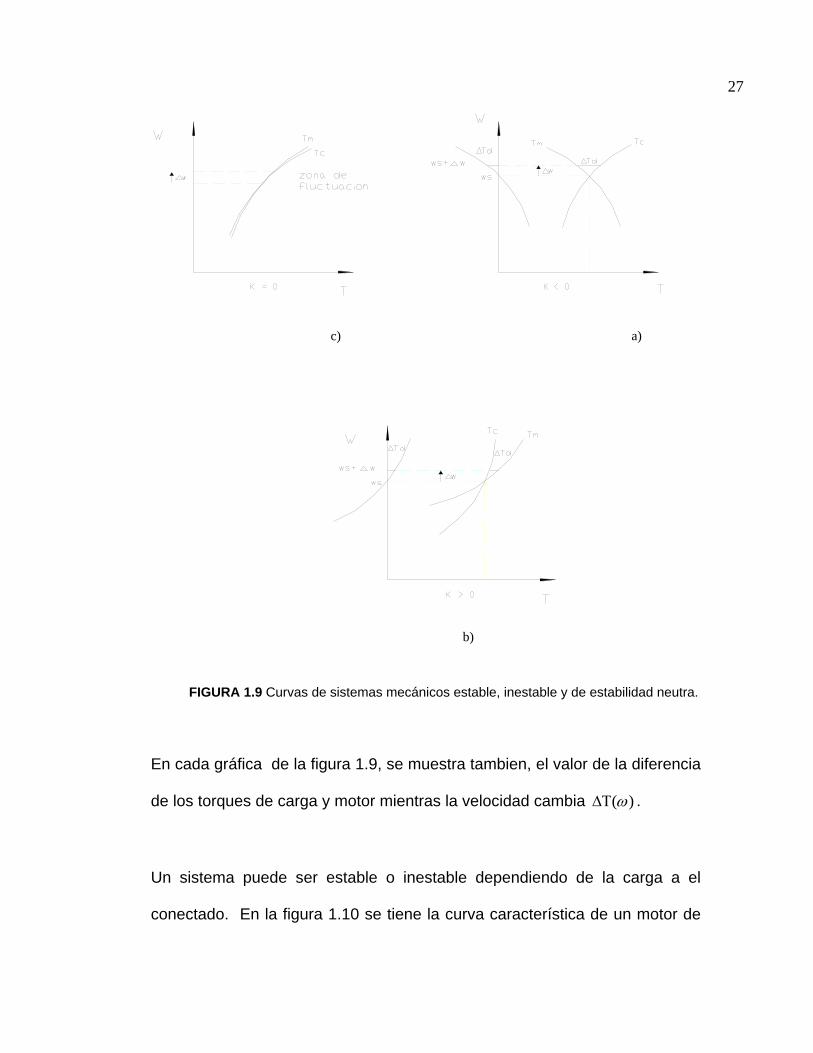
Si la magnitud de la diferencia entre los torques ( ) aumenta y el torque de
carga es mayor que el torque motor mientras se presenta un disturbio en el
sistema que provoca un aumento de la velocidad, el valor de K será mayor
que cero (figura 1.9 a). En este caso se considera que el sistema es estable
26
y el torque dinámico contrarrestará el efecto de aumento en la velocidad,
retornando el sistema de nuevo al equilibro. El efecto que se presenta
cuando la velocidad disminuye siendo K mayor que cero, es similar al
anterior, pero en este caso el torque dinámico contribuye al aumento de la
velocidad de modo que el sistema continúe en equilibrio.
Es importante tener en cuenta que un valor apreciable de K , hace que el
sistema sea mas rígido y por tanto un pequeño desplazamiento
provocado por un disturbio temporal decaiga mas rápidamente con una
función exponencial cuya constante de tiempo es K
j.
En la figura 1.9b se muestra un sistema mecánico inestable, en el que el
torque dinámico contribuye a cualquier perturbación de la velocidad,
haciendo que el sistema probablemente nunca llegue a un nuevo estado de
equilibrio. En este caso el valor de K es negativo.
En el caso en que K es igual a cero la estabilidad del sistema es neutra y el
punto de trabajo no se ha establecido. La velocidad fluctúa debido a
variaciones aleatorias del torque.
27
En cada gráfica de la figura 1.9, se muestra tambien, el valor de la diferencia
de los torques de carga y motor mientras la velocidad cambia )( .
Un sistema puede ser estable o inestable dependiendo de la carga a el
conectado. En la figura 1.10 se tiene la curva característica de un motor de
FIGURA 1.9 Curvas de sistemas mecánicos estable, inestable y de estabilidad neutra.
a)
b)
c)
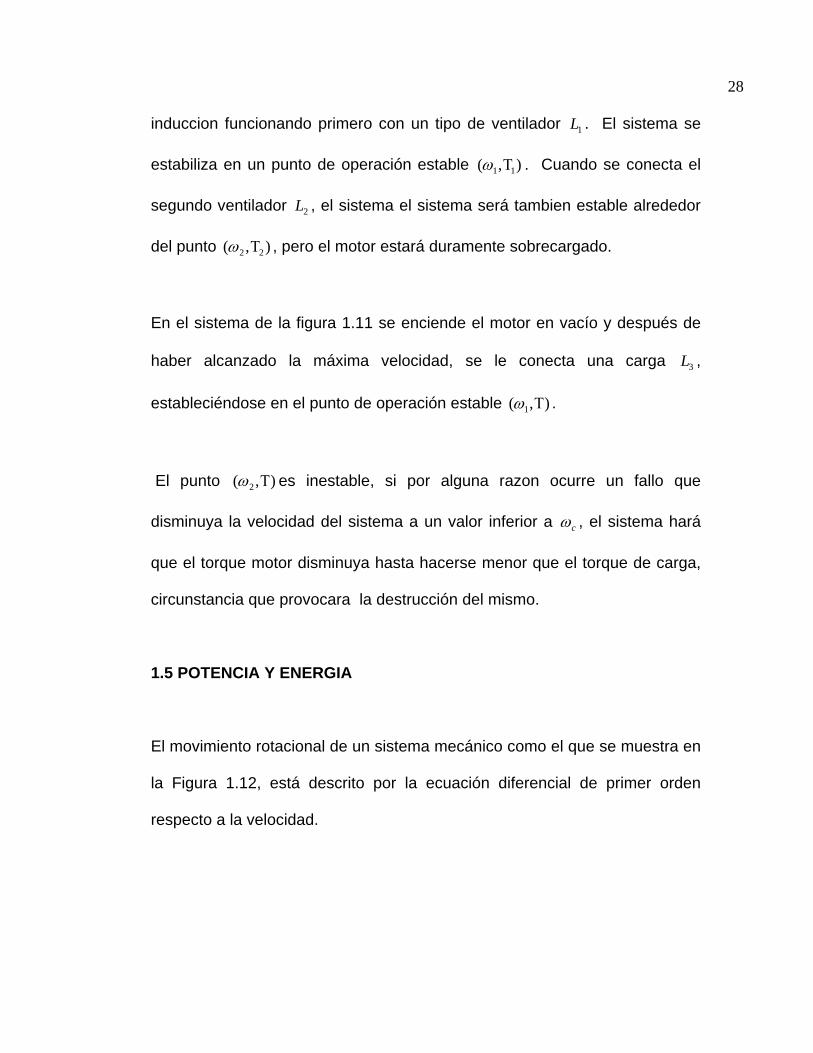
28
induccion funcionando primero con un tipo de ventilador 1L . El sistema se
estabiliza en un punto de operación estable ),( 11 . Cuando se conecta el
segundo ventilador 2L , el sistema el sistema será tambien estable alrededor
del punto ),( 22 , pero el motor estará duramente sobrecargado.
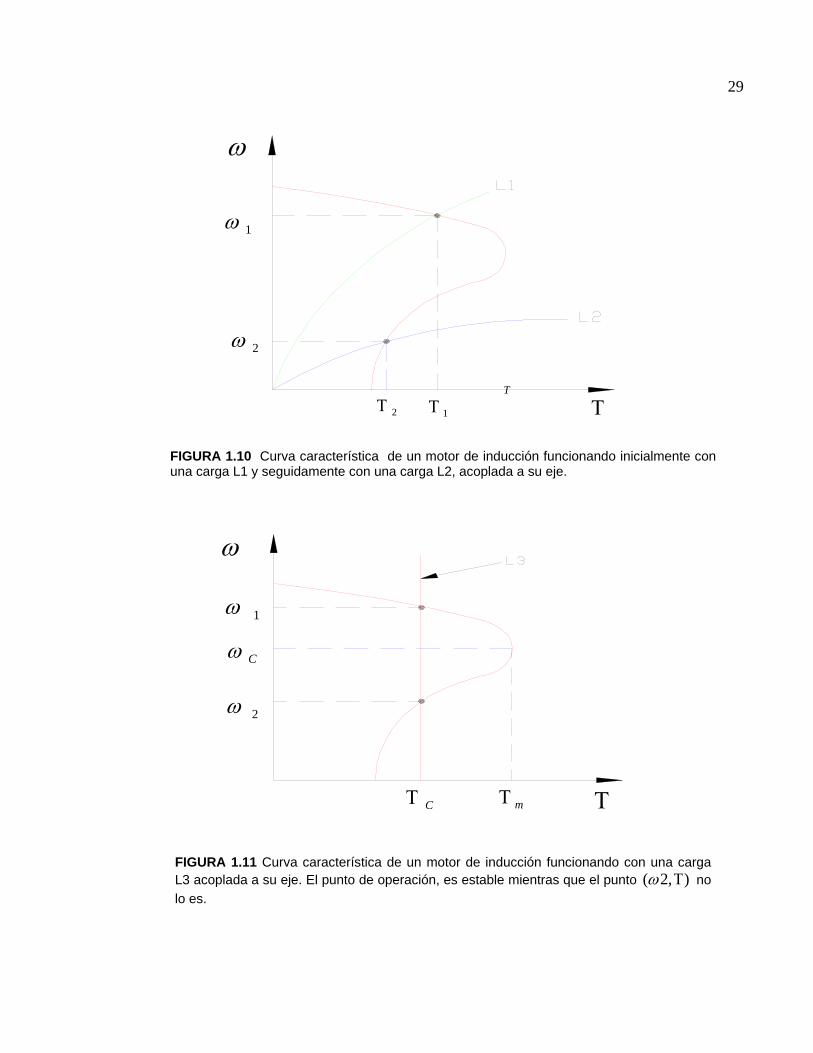
En el sistema de la figura 1.11 se enciende el motor en vacío y después de
haber alcanzado la máxima velocidad, se le conecta una carga 3L ,
estableciéndose en el punto de operación estable ),( 1 .
El punto ),( 2 es inestable, si por alguna razon ocurre un fallo que
disminuya la velocidad del sistema a un valor inferior a c , el sistema hará
que el torque motor disminuya hasta hacerse menor que el torque de carga,
circunstancia que provocara la destrucción del mismo.
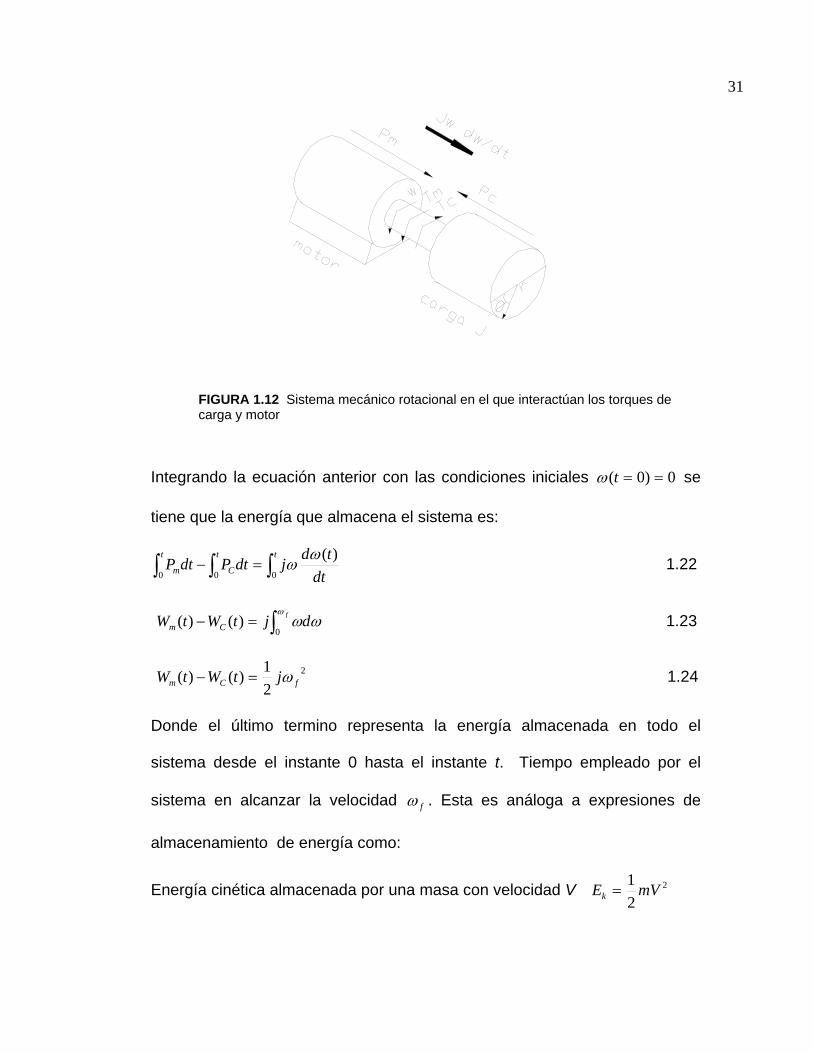
1.5 POTENCIA Y ENERGIA
El movimiento rotacional de un sistema mecánico como el que se muestra en
la Figura 1.12, está descrito por la ecuación diferencial de primer orden
respecto a la velocidad.
29
T
1
2
12
FIGURA 1.10 Curva característica de un motor de inducción funcionando inicialmente con una carga L1 y seguidamente con una carga L2, acoplada a su eje.
1
C
2
mC
FIGURA 1.11 Curva característica de un motor de inducción funcionando con una carga L3 acoplada a su eje. El punto de operación, es estable mientras que el punto ),2( no
lo es.

30
dt
tdjCm
)( 1.19
Al multiplicar en ambos lados de la ecuación por la velocidad de rotación del
sistema se obtiene un balance de potencias.
dt
tdjCm
)( 1.20
dt
tdjPP Cm
)( 1.21
Donde mP es la potencia que introduce el mecanismo impulsor del sistema,
el cual como ya se había mencionado, es por lo general un motor. CP
representa la potencia que ejerce la carga en contra de la potencia mP .
La expresión dt
tdj
)( representa el cambio de la diferencia de energías,
almacenada en la masa rotatoria respecto del tiempo.
De la ecuación 1.21 se puede decir que el flujo de energía se dirige hacia la
carga cuando Cm PP o por el contrario la carga introduce energía al
mecanismo impulsor cuando Cm PP y por tanto dt
tdj
)( es negativo (figura
1.12).
31
Integrando la ecuación anterior con las condiciones iniciales 0)0( t se
tiene que la energía que almacena el sistema es:
tt
C
t
m dt
tdjdtPdtP
000
)( 1.22
f
djtWtW Cm
0)()( 1.23
2
2
1)()( fCm jtWtW 1.24
Donde el último termino representa la energía almacenada en todo el
sistema desde el instante 0 hasta el instante t. Tiempo empleado por el
sistema en alcanzar la velocidad f . Esta es análoga a expresiones de
almacenamiento de energía como:
Energía cinética almacenada por una masa con velocidad V 2
2
1mVEk
FIGURA 1.12 Sistema mecánico rotacional en el que interactúan los torques de carga y motor
32
Energía potencial almacenada en un condensador 2
2
1cvEpc
Energía almacenada en un resorte 2
2
1kXEpe
Desde que la energía contenida en un cuerpo físico no pueda ser cambiada
instantáneamente6, la velocidad rotacional o lineal de un cuerpo con masa
debe ser siempre una función continua del tiempo.
En un sistema como el de la figura 1.13, similar al de una grúa, la energía
proporcionada por el motor a la carga es almacenada y su magnitud es
dependiente del valor de . Esta energía almacenada esta dispuesta a ser
retornada al motor, cuando se desee bajar la carga, en cuyo caso el torque
de carga será mayor que el torque motor.
1.6 CUADRANTES DE OPERACION
El análisis de transferencia de energía entre un motor y una carga se hace
mas sencillo usando un plano de coordenadas torque Vs velocidad.
Dependiendo de la ubicación del punto de trabajo en alguno de sus cuatro
cuadrantes, se puede determinar si el motor esta transfiriendo energía hacia
6 Esto requeriría una potencia infinita.

33
la carga, o si por el contrario el motor la esta recibiendo de ella, en cuyo caso
funciona como generador. (Figura 1.14).
FIGURA 1.13 Sistema mecánico rotacional en el que se almacena energía potencial a medida que se presenta variación en el ángulo
34
La ubicación del punto de operación determina además del régimen de
operación, el sentido del torque motor y el torque de carga y el sentido de
rotación del sistema.
Hay que tener muy en cuenta, que el comportamiento de las variables torque
y velocidad de un sistema mecánico, en el plano torque Vs velocidad,
obedecen a la característica conjunta del sistema )( , es decir, a la
gráfica de la diferencia de los torques del sistema mecánico.
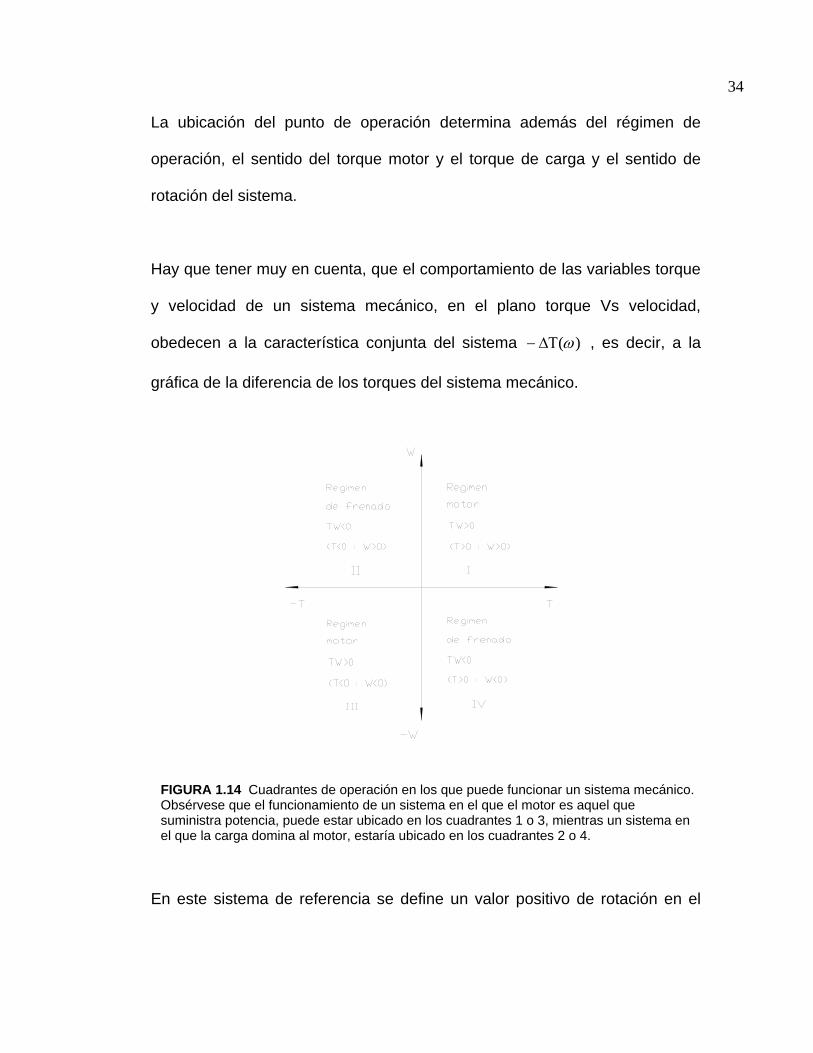
En este sistema de referencia se define un valor positivo de rotación en el
FIGURA 1.14 Cuadrantes de operación en los que puede funcionar un sistema mecánico. Obsérvese que el funcionamiento de un sistema en el que el motor es aquel que suministra potencia, puede estar ubicado en los cuadrantes 1 o 3, mientras un sistema en el que la carga domina al motor, estaría ubicado en los cuadrantes 2 o 4.
35
sentido contrario al de las manecillas del reloj (cuadrantes 1 y 2 de la figura
1.14). La potencia mecánica es inyectada por el motor en los cuadrantes 1 y
3, mientras la carga actúa como freno, pero cabe aclarar que mientras en el
cuadrante de operación 1, el sistema gira hacia la izquierda, en el cuadrante
3 lo hace hacia la derecha. En estas zonas de operación, el motor es quien
domina a la carga y por tanto se realiza una conversión de energía eléctrica
en mecánica.
En los cuadrantes de operación 2 y 4, la carga domina al motor y el torque
resultante tiene signo contrario a la velocidad.
El motor recibe energía mecánica en el eje y se convierte en generador al
intentar frenar la acción de la inercia de la carga. A causa de esto entrega
energía eléctrica a la red. Con ello 0 P .
Cuando un sistema estable trabaja en el cuadrante 1 y se incrementa de
manera forzosa la velocidad, el punto de trabajo se ubica en el cuadrante 2
haciendo que el motor funcione como generador.
Otro caso en el que el sistema pasa del cuadrante 1 al 2 se obtiene, cuando
por alguna razón se cambia de sentido el torque motor 7. Debido a la inercia
y a la velocidad que llevaba la carga en el instante del cambio, se genera
36
energía eléctrica por un breve lapso de tiempo. Esta característica es muy
empleada cuando se requiere detener o cambiar el sentido de giro de un
sistema mecánico de forma rápida, devolviendo la energía cinética
acumulada a la red eléctrica o en otro caso, disipándola en forma de calor.
Una forma de pasar del cuadrante 1 al 4 es elevando el torque de carga,
hasta hacer que el sistema gire en sentido contrario.
Es factible usar este metodo, solo si la potencia eléctrica entregada al motor
se disminuye, para evitar que este se destruya cuando el eje este detenido.
Como antes se menciono, cuando el torque motor es menor que el torque de
carga, el sistema tiende a frenarse. A los tres estados en que se logra esta
condición de frenado, se les conoce como regímenes de frenado.
1.6.1 Régimen de frenado recuperativo. Se consigue elevando la
velocidad del motor por encima de la velocidad de vacío. Permite entregar
energía eléctrica a la red mientras se obtiene un torque de frenado.
Haciendo balance de potencias se obtiene:
PPP em
Donde:
7 Esto se logra cambiando la polaridad de la fuente que alimenta un motor de corriente directa.
37
mP : Potencia Mecánica
eP : Potencia Eléctrica
P : Potencia de Perdidas
1.6.2 Régimen de frenado a contracorriente. Para este caso el motor
recibe energía mecánica en su eje y energía eléctrica de la red. Se
caracteriza por la presencia de perdidas que son disipadas en forma de calor
en los devanados del motor.
En este caso:
em PPP
1.6.3 Régimen de frenado dinámico. Este tipo de frenado tiene la
particularidad que la energía cinética que se ha acumulado en el motor y en
elementos móviles se transforma en energía eléctrica, pero sin devolverse a
la red, solo disipándose en resistencias conectadas a la salida de los
devanados del motor.
En este régimen, el balance de potencias queda:
PPm
En la figura 1.15 se muestran los diagramas de flujo de energía de los
regímenes de trabajo del motor.
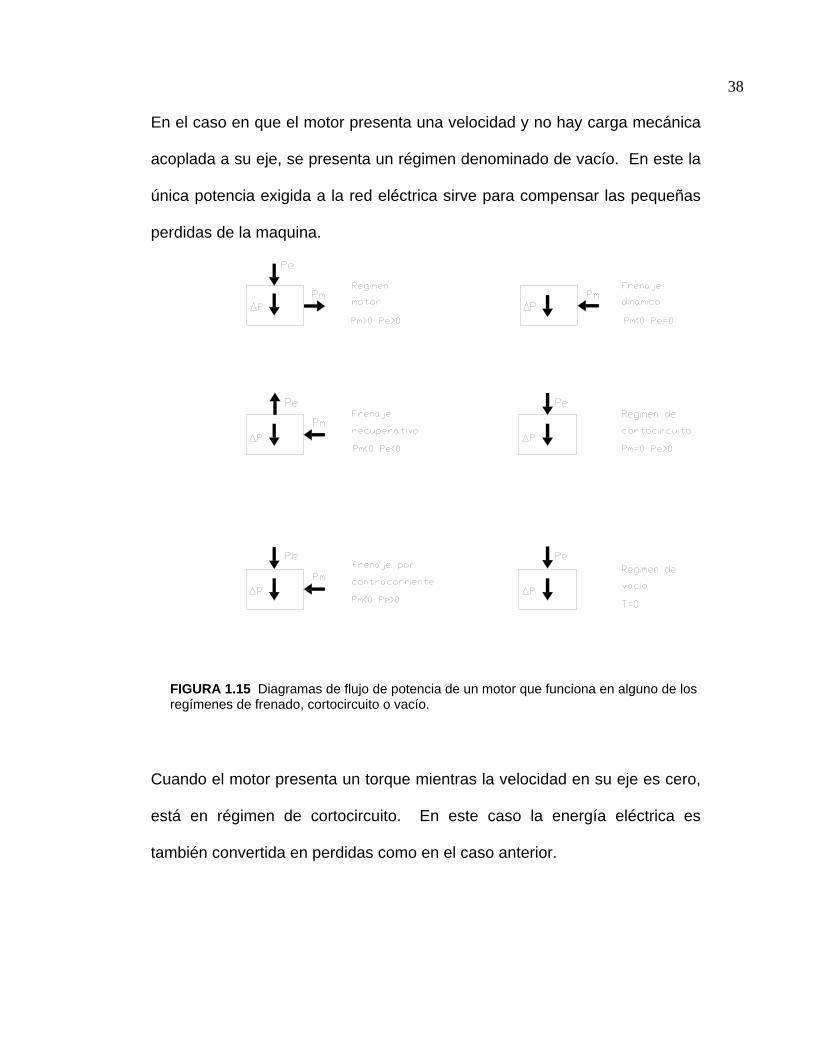
38
En el caso en que el motor presenta una velocidad y no hay carga mecánica
acoplada a su eje, se presenta un régimen denominado de vacío. En este la
única potencia exigida a la red eléctrica sirve para compensar las pequeñas
perdidas de la maquina.
Cuando el motor presenta un torque mientras la velocidad en su eje es cero,
está en régimen de cortocircuito. En este caso la energía eléctrica es
también convertida en perdidas como en el caso anterior.
FIGURA 1.15 Diagramas de flujo de potencia de un motor que funciona en alguno de los regímenes de frenado, cortocircuito o vacío.
39
MODELAMIENTO DE MOTORES DE CORRIENTE CONTINUA DE
EXCITACIÓN SEPARADA
2.1 INTRODUCCION
Las maquinas de corriente continua, funcionan con fuentes de energía de
corriente directa y son ampliamente usadas en dispositivos que requieren
precisión en cuanto a control de velocidad, por ejemplo en los sistemas que
mueven los rollos de papel.
Desafortunadamente, una de sus desventajas es el uso de colector o
conmutador, el cual es un cilindro que consiste de una serie de barras de
cobre que hacen contacto con la fuente de energía a través de unos grafitos
conductores llamados escobillas. Esta desventaja se refiere al aumento de
mantenimiento que se le debe hacer a la maquina y al incremento de la
dimensión axial del rotor y por tanto de su inercia.
40
En este capitulo son tenidas en cuenta las características generales de un
motor normal de DC, excepto aquellas que tienen que ver con los efectos de
reacción de armadura y saturación magnética en algunas zonas de los polos
a causa del campo magnético producido por la armadura. Por lo que se
considera un motor con interpolos y devanado de compensación.
También en este capitulo, se hace necesario modelar el circuito equivalente
del motor, con el fin de describir su comportamiento en los diferentes
regímenes de operación en estado estable.
2.2 CIRCUITO MAGNETICO DE UNA MAQUINA DE DC
El circuito magnético de una máquina de DC esta alimentado principalmente
por un devanado arrollado en el estator, llamado devanado de campo, el cual
produce la fuerza magnetomotriz Fmm necesaria para crear un flujo
magnético a través del hierro de la maquina. En algunos motores, este
devanado de DC es sustituido por Imanes permanentes, de ahí su
denominación de motor de imanes permanentes.
Lo que permite el movimiento del rotor de la maquina es la interacción de la
corriente que llevan los conductores alojados en las ranuras del mismo y el
campo magnético producido por el devanado del estator.
41
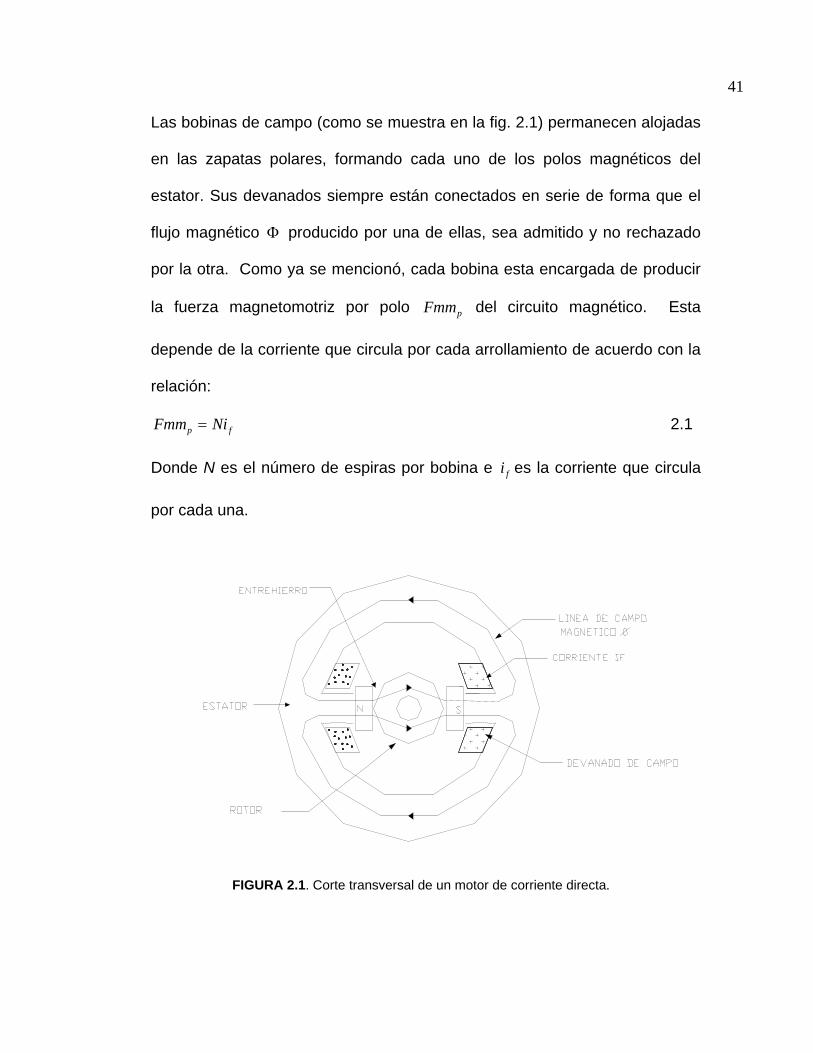
Las bobinas de campo (como se muestra en la fig. 2.1) permanecen alojadas
en las zapatas polares, formando cada uno de los polos magnéticos del
estator. Sus devanados siempre están conectados en serie de forma que el
flujo magnético producido por una de ellas, sea admitido y no rechazado
por la otra. Como ya se mencionó, cada bobina esta encargada de producir
la fuerza magnetomotriz por polo pFmm del circuito magnético. Esta
depende de la corriente que circula por cada arrollamiento de acuerdo con la
relación:
fp NiFmm 2.1
Donde N es el número de espiras por bobina e fi es la corriente que circula
por cada una.
FIGURA 2.1. Corte transversal de un motor de corriente directa.
42
Asumiendo que la oposición al paso del flujo magnético o reluctancia R del
hierro del circuito magnético, es comparablemente menor que la reluctancia
gR del entrehierro que separa al estator con el rotor, se puede afirmar que
las dos fuerzas magnetomotrices de los polos, entre las dos reluctancias del
entrehierro, equivalen al flujo que circula por la maquina.
De esta forma:
g
p
R
Fmm
2
2 2.2
g
p
R
Fmm 2.3
El flujo magnético producido en el estator de la maquina en entonces función
de la corriente de campo así:
g
f
R
Ni 2.4
Hay que tener en cuenta que esta relación no es lineal (Fig. 2.2), debido a
que el efecto de saturación del hierro de la maquina hace que varíe la
reluctancia. Esto significa que cuando la densidad de flujo se incrementa
hasta cierto valor, la reluctancia del hierro aumenta, no permitiendo el paso
de mas líneas de flujo a través del material ferromagnético.

43
Debido al fenómeno de histéresis es posible asegurar que el flujo para un
terminado valor de corriente fi , es predecible solo con la precisión de un
pequeño porcentaje.
FIGURA 2.3 Maquina D.C de cuatro polos magnéticos.
FIGURA 2.2 Curva de Magnetización del material
ferromagnético.
R
Webber
VueltaAmpNiF fp )(
44
Para hacer un mejor uso de la superficie libre del rotor, es posible aumentar
el numero de polos de la maquina. Esto implica menor material magnético
por unidad de torque (Figura. 2.3).
También es posible construir un motor de corriente directa con imanes
permanentes, los cuales reemplazan a los devanados de campo, pero como
más adelante se verá, no es posible controlarle la velocidad por encima del
valor nominal.
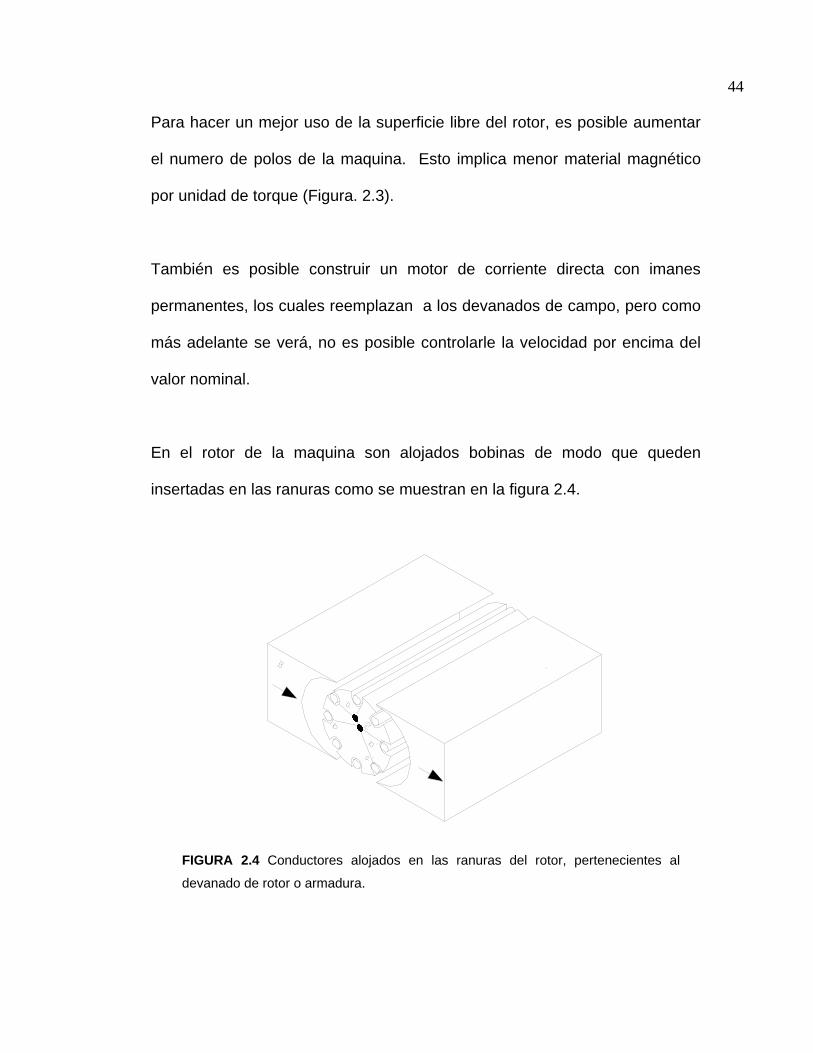
En el rotor de la maquina son alojados bobinas de modo que queden
insertadas en las ranuras como se muestran en la figura 2.4.
FIGURA 2.4 Conductores alojados en las ranuras del rotor, pertenecientes al
devanado de rotor o armadura.
45
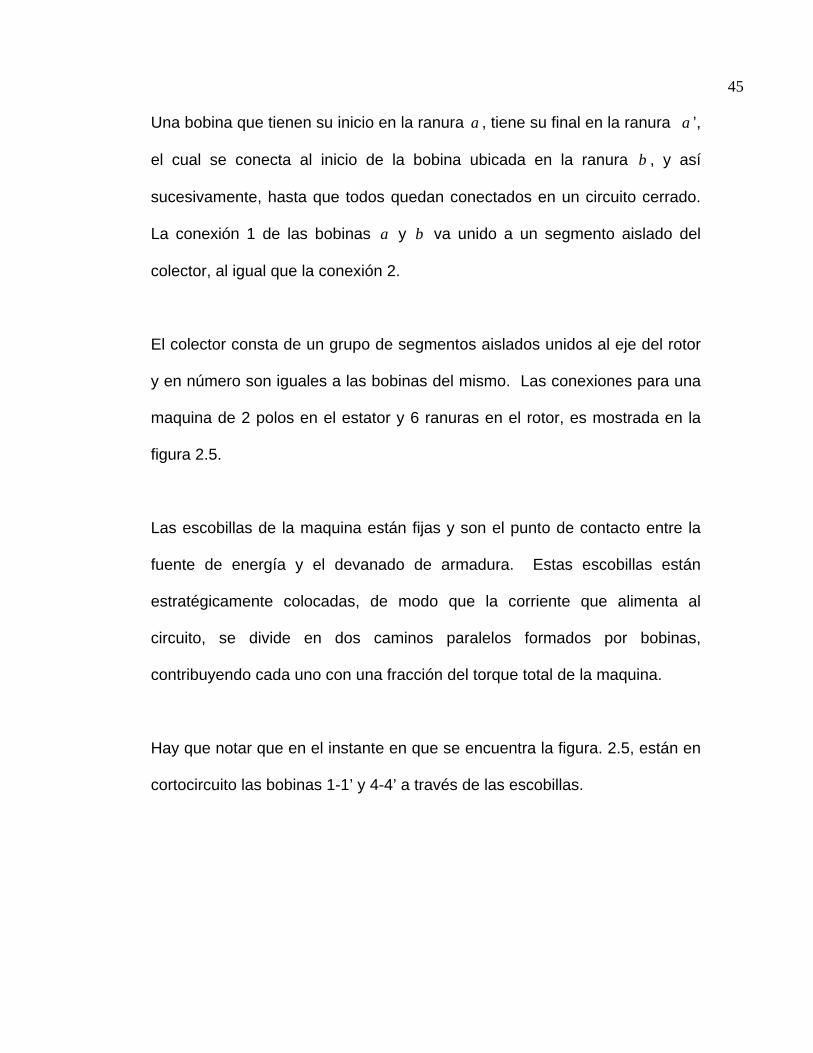
Una bobina que tienen su inicio en la ranura a , tiene su final en la ranura a ’,
el cual se conecta al inicio de la bobina ubicada en la ranura b , y así
sucesivamente, hasta que todos quedan conectados en un circuito cerrado.
La conexión 1 de las bobinas a y b va unido a un segmento aislado del
colector, al igual que la conexión 2.
El colector consta de un grupo de segmentos aislados unidos al eje del rotor
y en número son iguales a las bobinas del mismo. Las conexiones para una
maquina de 2 polos en el estator y 6 ranuras en el rotor, es mostrada en la
figura 2.5.
Las escobillas de la maquina están fijas y son el punto de contacto entre la
fuente de energía y el devanado de armadura. Estas escobillas están
estratégicamente colocadas, de modo que la corriente que alimenta al
circuito, se divide en dos caminos paralelos formados por bobinas,
contribuyendo cada uno con una fracción del torque total de la maquina.
Hay que notar que en el instante en que se encuentra la figura. 2.5, están en
cortocircuito las bobinas 1-1’ y 4-4’ a través de las escobillas.
46
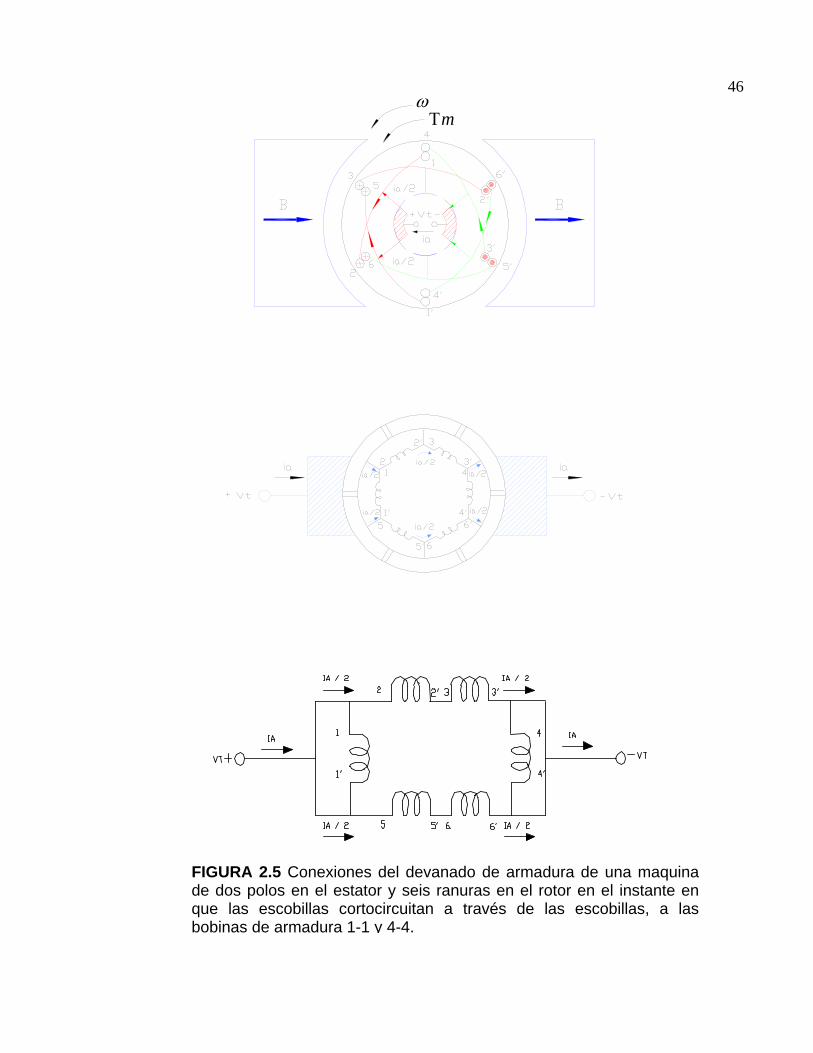
m
FIGURA 2.5 Conexiones del devanado de armadura de una maquina de dos polos en el estator y seis ranuras en el rotor en el instante en que las escobillas cortocircuitan a través de las escobillas, a las bobinas de armadura 1-1 y 4-4.
47
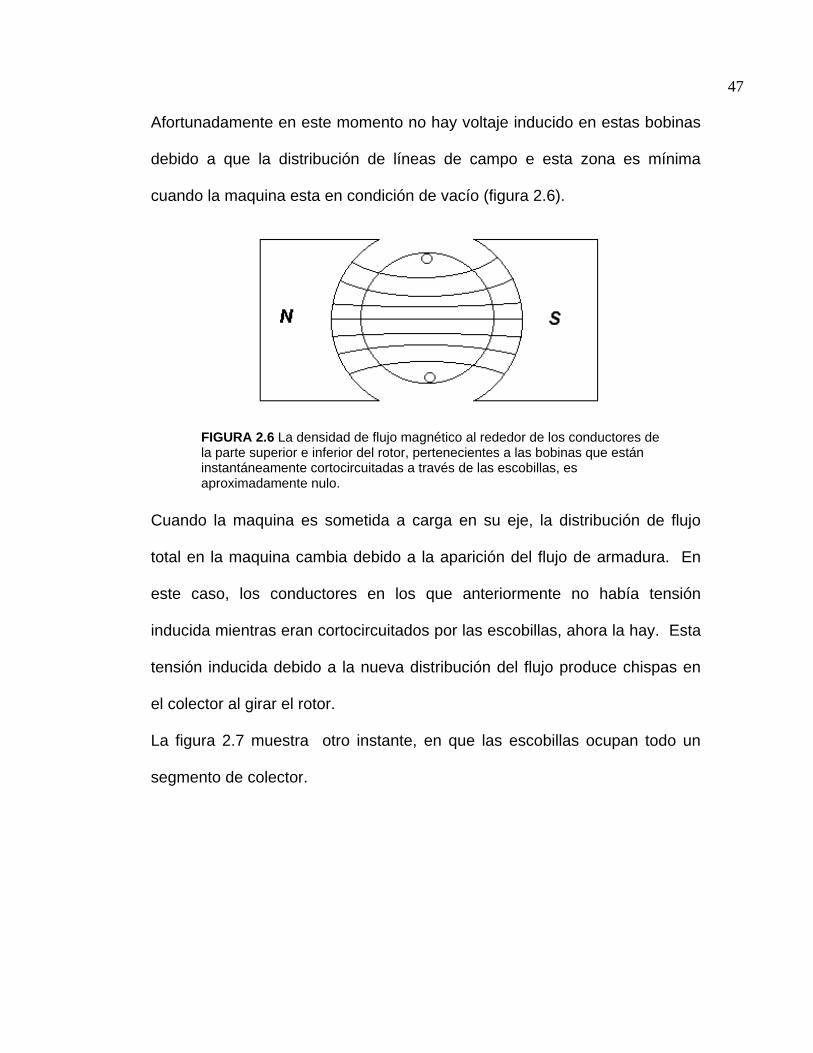
Afortunadamente en este momento no hay voltaje inducido en estas bobinas
debido a que la distribución de líneas de campo e esta zona es mínima
cuando la maquina esta en condición de vacío (figura 2.6).
Cuando la maquina es sometida a carga en su eje, la distribución de flujo
total en la maquina cambia debido a la aparición del flujo de armadura. En
este caso, los conductores en los que anteriormente no había tensión
inducida mientras eran cortocircuitados por las escobillas, ahora la hay. Esta
tensión inducida debido a la nueva distribución del flujo produce chispas en
el colector al girar el rotor.
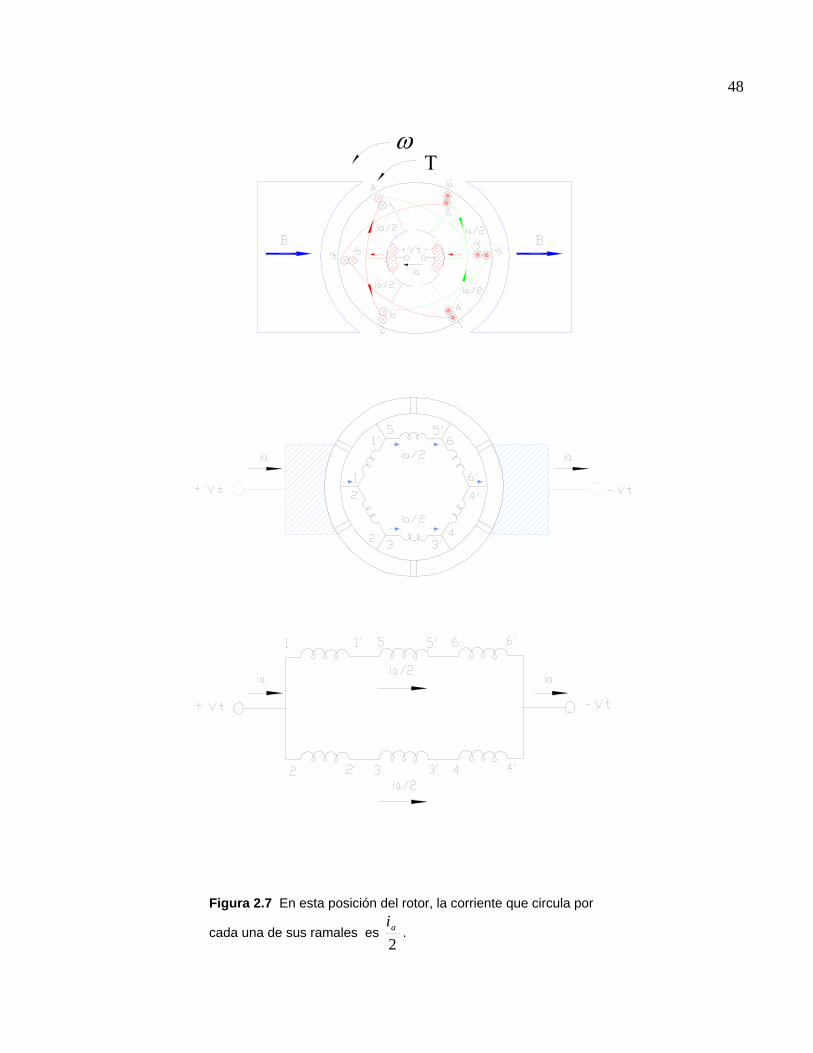
La figura 2.7 muestra otro instante, en que las escobillas ocupan todo un
segmento de colector.
FIGURA 2.6 La densidad de flujo magnético al rededor de los conductores de la parte superior e inferior del rotor, pertenecientes a las bobinas que están instantáneamente cortocircuitadas a través de las escobillas, es aproximadamente nulo.
48
Figura 2.7 En esta posición del rotor, la corriente que circula por
cada una de sus ramales es 2ai .
49
En ambas posiciones del rotor de la maquina de 2 polos y 2 escobillas, las
fuerzas contraelectromotrices de cada bobina son sumadas y equivalentes
en cada ramal paralelo.
Por lo general en maquinas pequeñas de mas de 2 polos, el número de
caminos paralelos )(A , es 2. En maquinas grandes el número de caminos
paralelos, es igual al número de polos )(P o un múltiplo de él.
2.3 GENERACION DE TORQUE Y VOLTAJE
En un motor convencional con 2 ramales en paralelo, por cada uno circula
una corriente de magnitud 2ai 8. En el caso de 4 ramales, por cada uno
circulara una corriente de 4ai y así sucesivamente.
En total se considera que la armadura tiene un numero aN de espiras
conectadas en serie y que el numero de conductores vistos a través de la
sección transversal de la armadura son aN2 .
8 Esto con excepción de las bobinas que son cortocircuitadas en el proceso de conmutación de un camino al otro.

50
La densidad de corriente lineal C por los conductores del rotor alrededor de
su periferia circular es:
r
iN
C
aa
22
2 2.5
Para ser más precisos, C representa la densidad de corriente por unidad de
longitud de periferia del rotor.
r
iNC aa
2
LrotordelPerimetro
sconductore los todosde totalcorrientela es
aa iN
aa iNl
a
b
FIGURA 2.8 Lamina cilíndrica imaginaria de material conductor por la que
circula una corriente aa iN desde a hasta b .
51
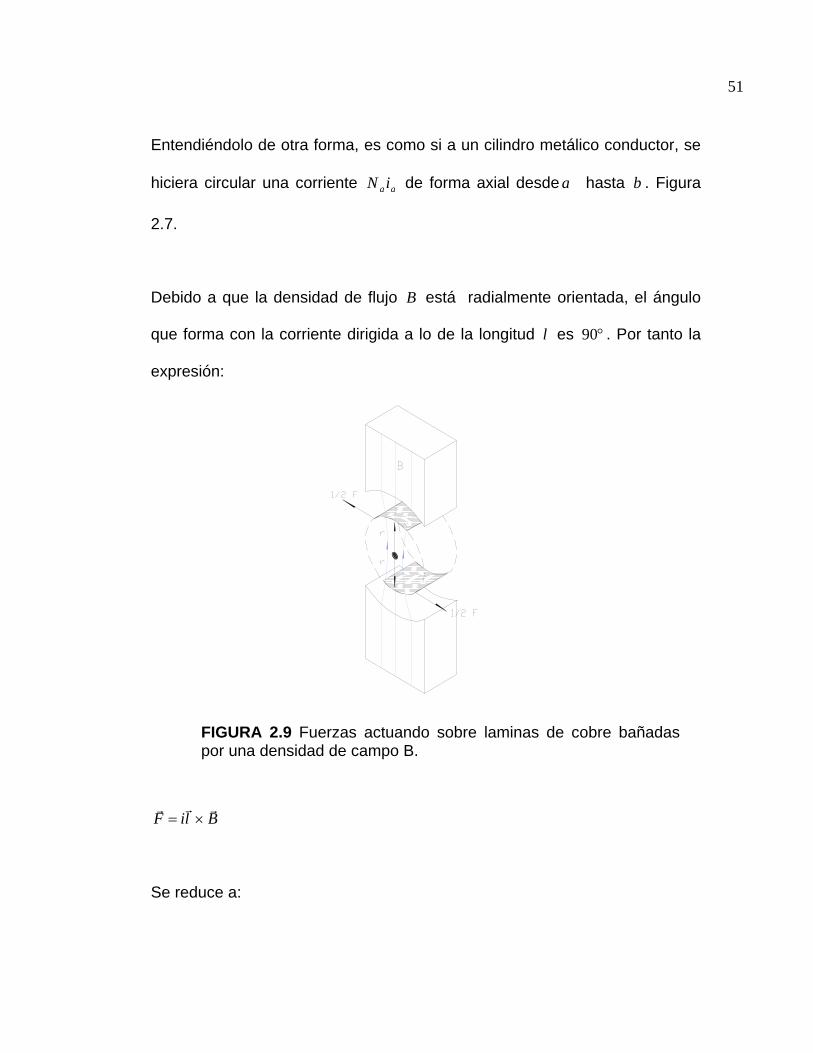
Entendiéndolo de otra forma, es como si a un cilindro metálico conductor, se
hiciera circular una corriente aa iN de forma axial desde a hasta b . Figura
2.7.
Debido a que la densidad de flujo B está radialmente orientada, el ángulo
que forma con la corriente dirigida a lo de la longitud l es 90 . Por tanto la
expresión:
BliF
Se reduce a:
FIGURA 2.9 Fuerzas actuando sobre laminas de cobre bañadas por una densidad de campo B.

52
ilBF 2.6
Se denomina , la superficie de la armadura bañada por la densidad de flujo.
Entonces la fuerza por unidad de área de superficie de armadura bañada con
una densidad de flujo B en el caso que toda la armadura fuese cubierta con
B sería:
Br
iNF aa
)2(
CBF 2.7
Como el área total es la de un cilindro entonces:
lr)2(
Por tanto, la fuerza total ejercida en todo el cilindro es:
lBrr
iNF aa )2(
)2(
CBF 2.8
Pero en una maquina real, toda la superficie de la armadura no es bañada
por B debido a que los polos no la cubren totalmente ya que solo cubren a
una parte del área total de la armadura denominada
. La fuerza ejercida
por los polos de una maquina real que afecta solo al área de superficie bajo
cada zapata polar, se denomina pF y es equivalente a:
pp CBF 2.9
53
Entonces el torque ejercido en el área de cilindro conductor cubierta por la
densidad de campo magnético B de los polos del motor es:
prFTm 2
prCBTm 2
apa iB
NTm )(
Mas conocida como:
aikTm 2.10
Donde es el flujo que atraviesa el área
del cilindro conductor de la
armadura, equivalente al área de los polos. En una maquina de 2 polos, la
constante k depende solo del número de espiras del devanado, pero en una
maquina de P polos con un devanado de A caminos en paralelo, k es:
A
PNk a
En la generación de voltaje, se considera de nuevo, un rotor con aN espiras
y aN2 conductores en sus ranuras. Si se considera que la potencia
mecánica de salida es equivalente a la potencia electromagnética en la
armadura:
aaiE
aaa iEik
kEa 2.11
54
2.4 CIRCUITO EQUIVALENTE DE UN MOTOR D.C. DE EXCITACION
SEPARADA
En el estudio de las maquinas eléctricas es necesario recurrir a un modelo
equivalente representado por un circuito eléctrico, el cual describe de manera
aproximada el comportamiento de las variables que intervienen en el
funcionamiento del motor.
Un motor de corriente continua de excitación independiente, como ya se
mencionó, es excitado en su devanado de campo con una señal de corriente
directa fi . El rotor o armadura por su parte, es también excitado con una
señal de este tipo. La interacción de los campos magnéticos producidos por
el devanado de campo y la armadura produce el torque motor y la interacción
entre el campo magnético de excitación y la velocidad de los conductores del
devanado de armadura, produce una fuerza contraelectromotriz aproximada
al valor de la tensión de excitación de armadura.
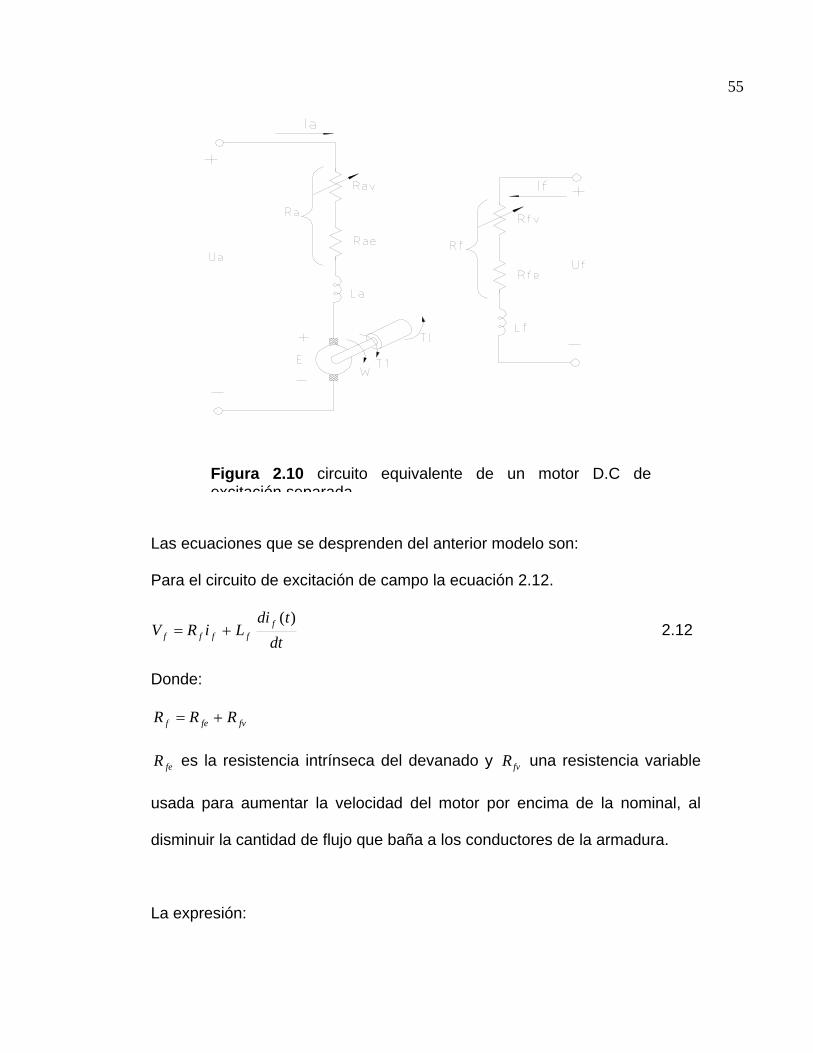
Los fenómenos anteriormente mencionados son descritos por un circuito
equivalente modelado de la siguiente manera (Figura 2.10).
55
Las ecuaciones que se desprenden del anterior modelo son:
Para el circuito de excitación de campo la ecuación 2.12.
dt
tdiLiRV f
ffff
)( 2.12
Donde:
fvfef RRR
feR es la resistencia intrínseca del devanado y fvR una resistencia variable
usada para aumentar la velocidad del motor por encima de la nominal, al
disminuir la cantidad de flujo que baña a los conductores de la armadura.
La expresión:
Figura 2.10 circuito equivalente de un motor D.C de excitación separada
56
dt
tdiL f
f
)( 2.13
Equivalente a dt
tdN f )(
, hace que la ecuación 2.12 sea de carácter no lineal
debido a que la relación entre la corriente y el flujo , gráficamente tiene
forma similar a la curva de saturación magnética.
Se considerará entonces, que el circuito está modelado, teniendo en cuenta
una relación lineal entre el flujo y la corriente. En cuyo caso:
)()( tNtiL ffff
Donde:
fL : Es la inductancia propia del devanado de campo. Esta es constante
cuando la relación entre el flujo y la corriente, es lineal.
)(ti f : Es la corriente que circula por el devanado de campo
fN : Es el numero de espiras contenidas en el devanado de campo.
)(tf : Es el flujo propio del devanado de campo.
La ecuación 2.13 corresponde a la tensión desarrollada en el devanado de
campo. Esta es una expresión transitoria que tiene valor, solo cuando se
presentan variaciones de corriente a través de él, debidas al cambio de la
tensión de campo.

57
La ecuación relacionada con el circuito de armadura es:
aaaa LiRV dt
dia 2.14
Donde:
aeava RRR
Siendo aeR la resistencia natural del devanado de armadura y avR la
resistencia variable usada para variar la corriente que circula por el circuito
de armadura1.
En el análisis de régimen permanente o estado estacionario las ecuaciones
del sistema se modifican así:
fff iRV 2.15
EiRV aaa 2.16
Donde la variable E, conocida como tensión inducida o tensión de velocidad,
se puede expresar como:
kE
El flujo de campo magnético esta representado por la variable y K es
una constante que depende de los datos constructivos del motor.
Con lo anterior la ecuación 2.16 se puede escribir de la siguiente manera:
1 La variación de la resistencia de armadura es empleada en un método que permite la variación de

58
kiRV aaa 2.17
Como se había mencionado el torque se puede expresar como:
aik
Para determinar la ecuación de la característica de velocidad de un motor de
D.C de excitación independiente, se procede a despejar la velocidad en
términos de ai de la siguiente manera:
aaa i
k
R
k
V
2.18
La gráfica descrita por la ecuación anterior (figura 2.11) es una línea recta
con pendiente
kRa y corte en el eje de la velocidad, cuando la corriente que
circula por la armadura es cero igual a:k
Va .
Despejando el termino ai de la ecuación 2.10 y reemplazándolo en la
ecuación 2.18, se obtiene la expresión de la característica mecánica del
motor D.C.
k
ia
2)(k
R
k
V aa 2.19
velocidad del motor D.C.(Según Chapman). Este método será estudiado en el capitulo IV.
59
Se puede apreciar en las ecuaciones 2.18 y 1.19, que la velocidad es un
parámetro que puede ser modificado variando bien sea el voltaje aplicado a
la armadura, el flujo del campo, o el torque motor mediante la variación de la
corriente ai .
Teniendo en cuenta que la corriente fi se considera constante y por tanto
que el flujo producido por ésta corriente en el circuito de campo también lo
es, la ecuación 2.19 se puede escribir de la siguiente manera:
2C
R
C
V aa Donde: kC 2.20
Se observa en la ecuación 2.20 que la gráfica descrita por esta expresión
(figura 2.12) es una línea recta con pendiente negativa 2C
Ra y punto de
corte con el eje de las ordenadas en C
Va . El comportamiento lineal de la
característica mecánica del motor de corriente directa es lo que permite que
el control de velocidad de este tipo de motor, sea muy preciso y simplificado.
El punto de corte con el eje de las ordenadas corresponde a la velocidad de
vacío del motor, figuras 2.11 y 2.12.
k
Va0 2.21
60
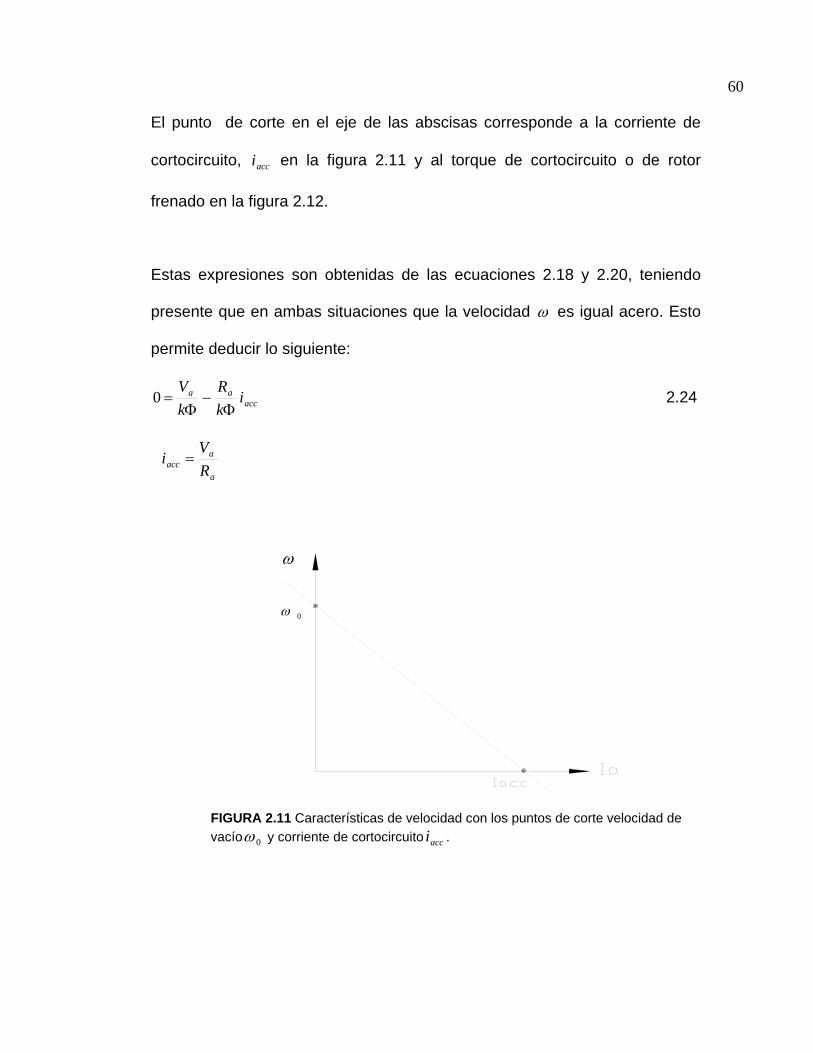
El punto de corte en el eje de las abscisas corresponde a la corriente de
cortocircuito, acci en la figura 2.11 y al torque de cortocircuito o de rotor
frenado en la figura 2.12.
Estas expresiones son obtenidas de las ecuaciones 2.18 y 2.20, teniendo
presente que en ambas situaciones que la velocidad es igual acero. Esto
permite deducir lo siguiente:
accaa i
k
R
k
V
0 2.24
a
aacc R
Vi
0
FIGURA 2.11 Características de velocidad con los puntos de corte velocidad de
vacío 0 y corriente de cortocircuito acci .

61
Recordando que avaea RRR :
avae
aacc RR
Vi
2.25
Para el torque de cortocircuito cc :
ccaa
k
R
k
V
2)(0
a
acc R
kV 2.26
ó también:
avae
acc RR
kV
0
cc
Figura 2.12 Características mecánicas con los puntos de corte
velocidad de vacío 0 y torque de cortocircuito cc .
62
De las expresiones obtenidas se puede apreciar que acci y cc dependen de
la resistencia de armadura, del voltaje de armadura y del flujo de excitación,
y que al variar cualquiera de estos parámetros puede obtenerse
determinadas familias de curvas.
Como ejemplo si se observa detenidamente la figura 2.13, se presenta una
familia de curvas donde su factor de variación ha sido el incremento de la
resistencia en serie con la armadura, la curva superior representa la
característica natural del motor, la cual se ha determinado bajo los
parámetros nominales de la maquina annn i,, y la resistencia variable
0avR .
Las coordenadas ),( nn , corresponden al punto de establecimiento del
motor funcionando con una carga en su eje, como se estudio en el capitulo
anterior.
Donde 4321 ,,, RRRR son valores adoptados por la resistencia variable avR .
Se puede destacar de la gráfica, que todas las características se cortan en el
mismo punto de velocidad de vacío 0 . El incremento de la resistencia
variable hace que la pendiente de la característica sea mayor, ocasionando
que la caída de velocidad sea mucho mas grande y que la rigidez sea menor.
Si se desea valorar la rigidez expresamos )( :
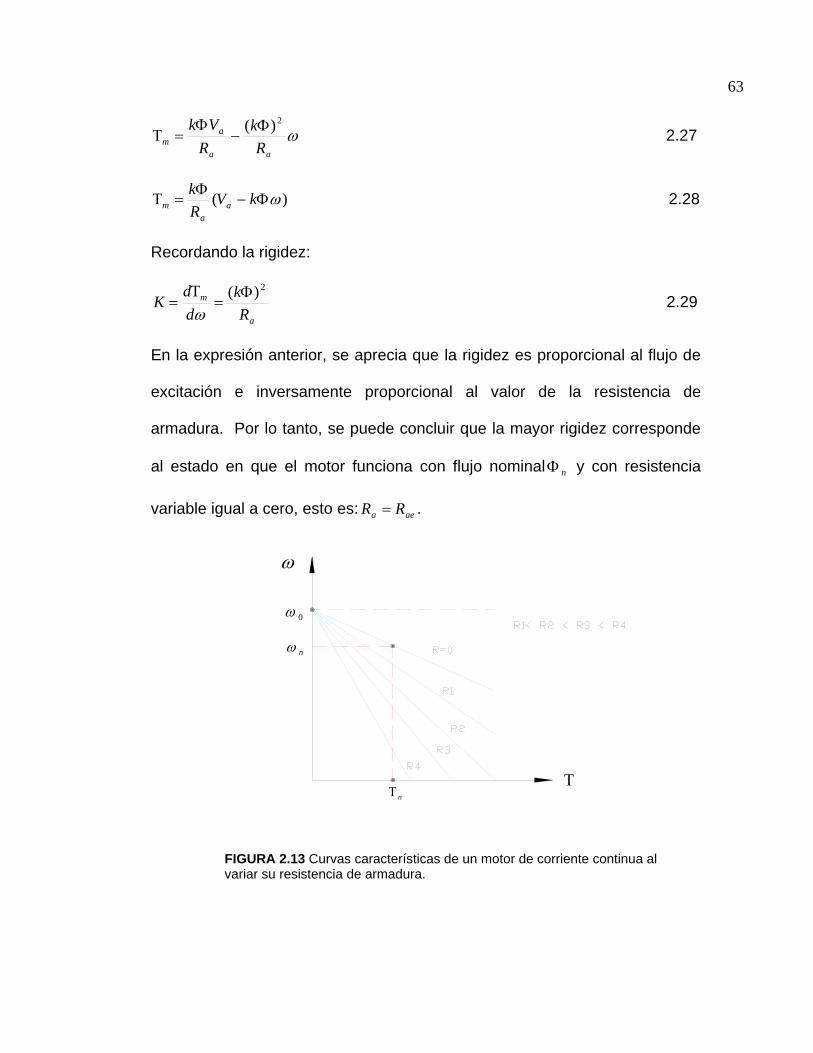
63
aa
am R
k
R
Vk 2)(
2.27
)(
kVR
ka
am 2.28
Recordando la rigidez:
a
m
R
k
d
dK
2)(
2.29
En la expresión anterior, se aprecia que la rigidez es proporcional al flujo de
excitación e inversamente proporcional al valor de la resistencia de
armadura. Por lo tanto, se puede concluir que la mayor rigidez corresponde
al estado en que el motor funciona con flujo nominal n y con resistencia
variable igual a cero, esto es: aea RR .
0
n
n
FIGURA 2.13 Curvas características de un motor de corriente continua al variar su resistencia de armadura.
64
Es claro que existe una relación inversa entre la rigidez mecánica del motor y
la variación de la velocidad , para mayor comprensión la ecuación 2.20
se expresa, de la siguiente manera:
0 2.30
Donde se aprecia que la variación de la velocidad:
2)(
)(
k
RR avae 2.31
La expresión anterior demuestra que el aumento de la resistencia de
armadura incrementa la variación o salto de velocidad. Si despejamos
de la ecuación 2.30, y dividimos entre 0 :
0
0
0
v 2.32
Este parámetro se llamara salto de velocidad o variación de velocidad pero
en unidades relativas y tienen mucha similitud con el deslizamiento de un
motor de inducción aunque sin el significado de este.
2.5 REGIMENES ENERGETICOS
El anterior análisis permitía observar el comportamiento de la maquina D.C.
actuando en el régimen motor, pero la maquina D.C. posibilita ampliar el
rango de operación, es por ello que es necesario estudiar los regímenes de
frenado donde la maquina puede llegar a convertirse en un generador.
65
2.5.1 Régimen de frenado recuperativo. Para alcanzar esta situación se
debe cumplir que la velocidad de marcha de la maquina sea superior a la
velocidad de vacío > 0 resultando que la tensión inducida kE se
hace mayor al voltaje aplicado aV en terminales con ello la corriente tiene un
cambio de signo, es decir ha cambiado su sentido:
a
aa R
EVi
2.33
a
aa R
VEi
)( 2.34
Con lo anterior el torque de la maquina se convierte en un torque de freno:
af ik
De esta manera se puede apreciar en la figura 2.14, la prolongación de la
característica del motor en el segundo cuadrante.
En este régimen, la maquina es convertida en generador y entrega la energía
al sistema que ha acumulado en su estado motor. Este tipo de frenado es
energéticamente económico ya que la eficiencia es de un valor cercano a la
unidad, debido a que las perdidas por efecto joule en la resistencia de
armadura del motor son mínimas.
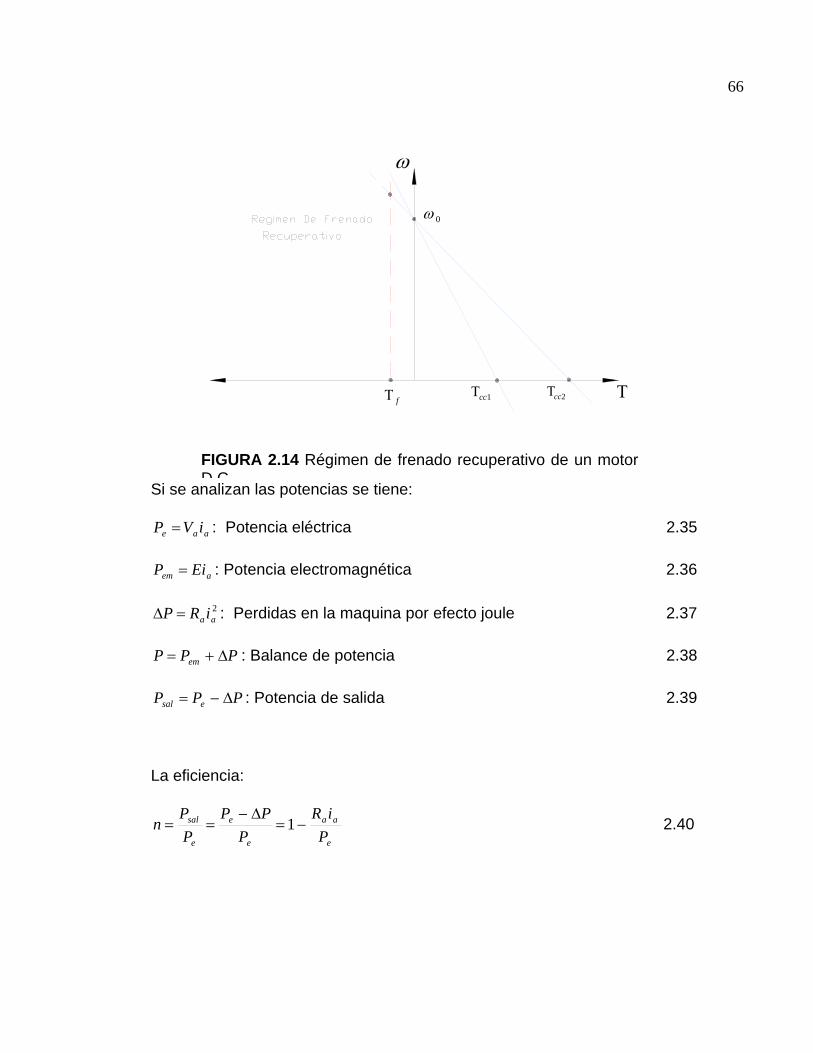
66
Si se analizan las potencias se tiene:
aae iVP : Potencia eléctrica 2.35
aem EiP : Potencia electromagnética 2.36
2aaiRP : Perdidas en la maquina por efecto joule 2.37
PPP em : Balance de potencia 2.38
PPP esal : Potencia de salida 2.39
La eficiencia:
e
aa
e
e
e
sal
P
iR
P
PP
P
Pn
1 2.40
0
f 1cc 2cc
FIGURA 2.14 Régimen de frenado recuperativo de un motor D C
67
Hay que hacer claridad que la potencia electromagnética se diferencia de la
potencia mecánica del eje por las perdidas mecánicas del tipo ventilación,
rodamientos, perdidas en el hierro, que en muchos casos se llaman perdidas
misceláneas miscP .
miscemm PPP 2.41
Para una mejor aproximación estas perdidas son despreciadas quedando:
emm PP 2.42
2.5.2 Régimen de frenado a contracorriente. Este régimen de operación
en una maquina D.C., se puede lograr de dos formas.
Cuando el torque de carga c supera el valor del torque motor m , esto ocurre
comúnmente en el descenso de cargas que normalmente trabajan con grúas,
como se aprecia en la figura 2.15.
El torque de carga debe superar de manera exacta el torque de
cortocircuito, cc haciendo que la característica atraviese el IV cuadrante, con
lo cual cambia el sentido de la velocidad y por ende la tensión inducida
kE cambia de signo, ocasionando una variación en la dirección de la
corriente ai :
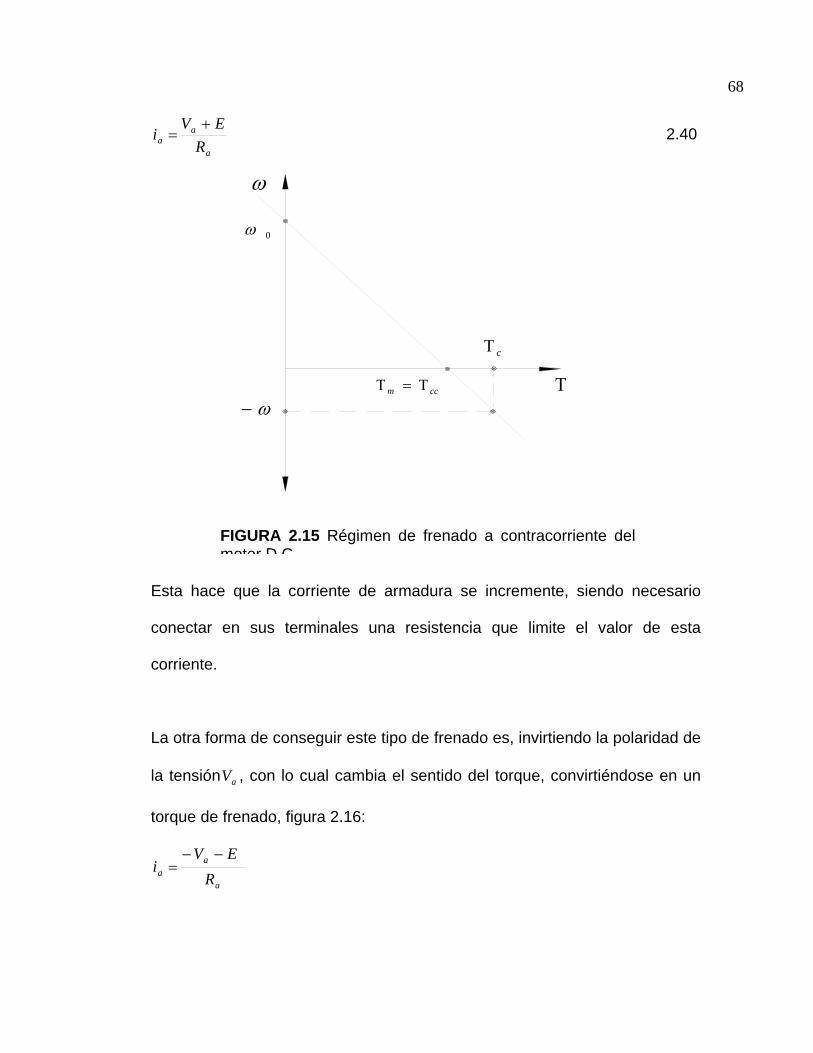
68
a
aa R
EVi
2.40
Esta hace que la corriente de armadura se incremente, siendo necesario
conectar en sus terminales una resistencia que limite el valor de esta
corriente.
La otra forma de conseguir este tipo de frenado es, invirtiendo la polaridad de
la tensión aV , con lo cual cambia el sentido del torque, convirtiéndose en un
torque de frenado, figura 2.16:
a
aa R
EVi
0
ccm
c
FIGURA 2.15 Régimen de frenado a contracorriente del motor D C
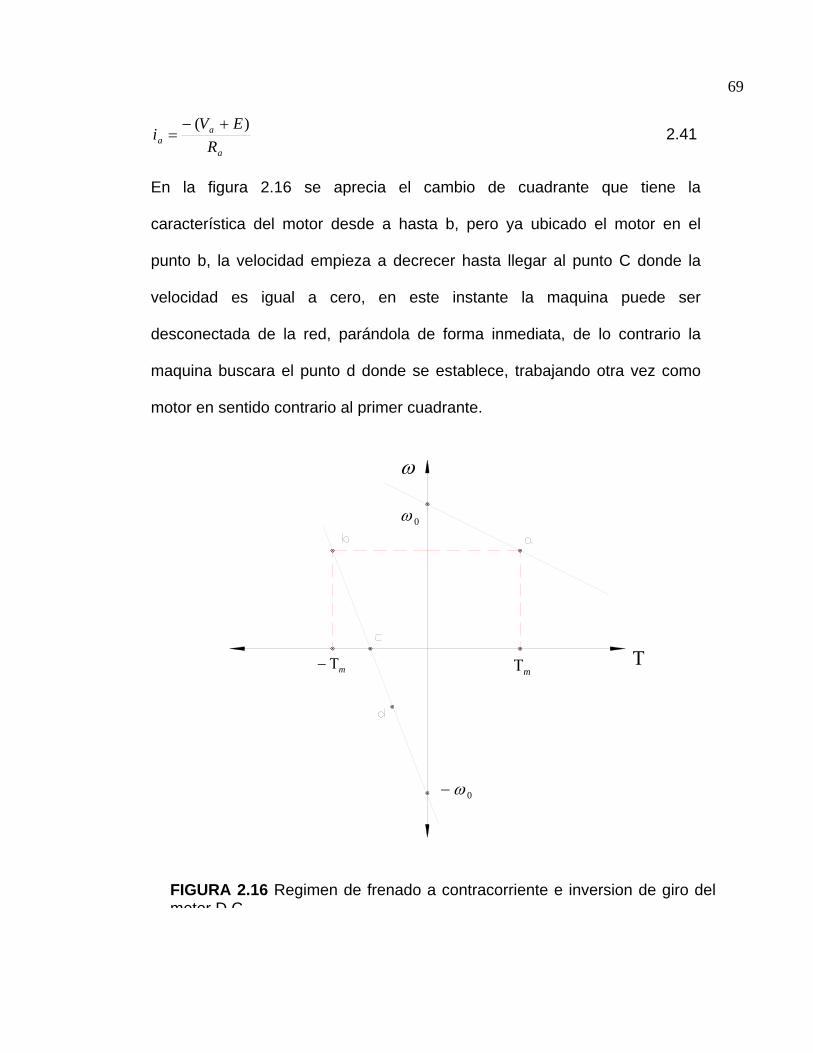
69
a
aa R
EVi
)( 2.41
En la figura 2.16 se aprecia el cambio de cuadrante que tiene la
característica del motor desde a hasta b, pero ya ubicado el motor en el
punto b, la velocidad empieza a decrecer hasta llegar al punto C donde la
velocidad es igual a cero, en este instante la maquina puede ser
desconectada de la red, parándola de forma inmediata, de lo contrario la
maquina buscara el punto d donde se establece, trabajando otra vez como
motor en sentido contrario al primer cuadrante.
m m
0
0
FIGURA 2.16 Regimen de frenado a contracorriente e inversion de giro del motor D C
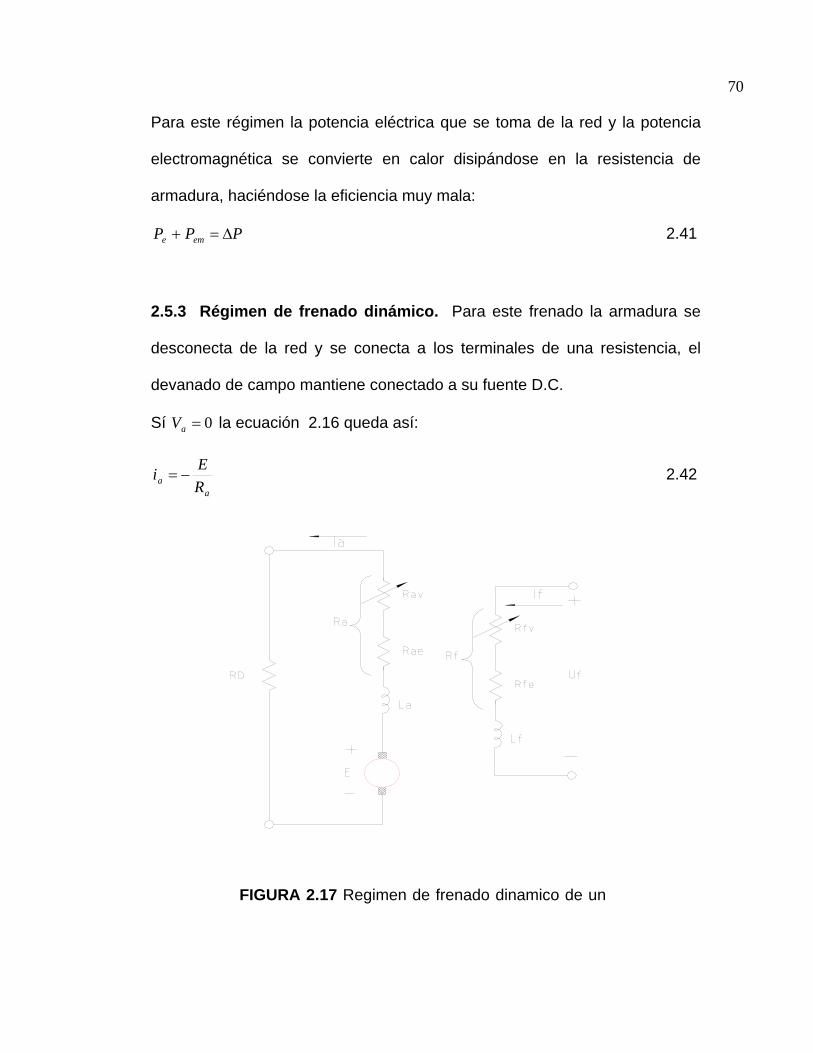
70
Para este régimen la potencia eléctrica que se toma de la red y la potencia
electromagnética se convierte en calor disipándose en la resistencia de
armadura, haciéndose la eficiencia muy mala:
PPP eme 2.41
2.5.3 Régimen de frenado dinámico. Para este frenado la armadura se
desconecta de la red y se conecta a los terminales de una resistencia, el
devanado de campo mantiene conectado a su fuente D.C.
Sí 0aV la ecuación 2.16 queda así:
aa R
Ei 2.42
FIGURA 2.17 Regimen de frenado dinamico de un

71
La corriente ai cambia de sentido y nuevamente el torque motor se convierte
en un torque de frenado aik y la característica mecánica:
ada i
k
RR
)(
2.43
2)(
)(
k
RR da 2.44
2
)(
C
RR da
2.45
Se puede que las características son un grupo de líneas rectas que pasan
por el origen y cuya pendiente se hace mayor a medida que se incrementa
las resistencias de armadura.
La ecuación de potencias queda así:
PPem 0 2.46
Toda la energía acumulada por el motor se disipa en forma calórica en la
resistencia de armadura, por ende la eficiencia es igual de mala como en el
frenado a contracorriente.

72
FIGURA 2.18 Características del régimen de frenado dinámico
73
MODELAMIENTO DE MOTORES DE INDUCCION
3.1 INTRODUCCION
El motor o maquina de inducción ha sido uno de los inventos más
trascendentales en el desarrollo de la tecnología en el ámbito industrial,
debido a su extendido uso en la actualidad.
El objeto de este capitulo es dar a conocer algunas características
importantes del funcionamiento y métodos de variación de velocidad de este
motor. Creado por Nicola Tesla en 1883, su principio básico se fundamenta
en la producción de un campo magnético giratorio en el estator, el cual
induce otro campo magnético sobre un rotor compacto de devanado en corto
circuito, que lo sigue.
Hasta el actual desarrollo de la electrónica de potencia, su funcionalidad
estaba restringida a al operación a velocidad constante, al ser alimentado
con una fuente de energía eléctrica trifásica. Pero los convertidores
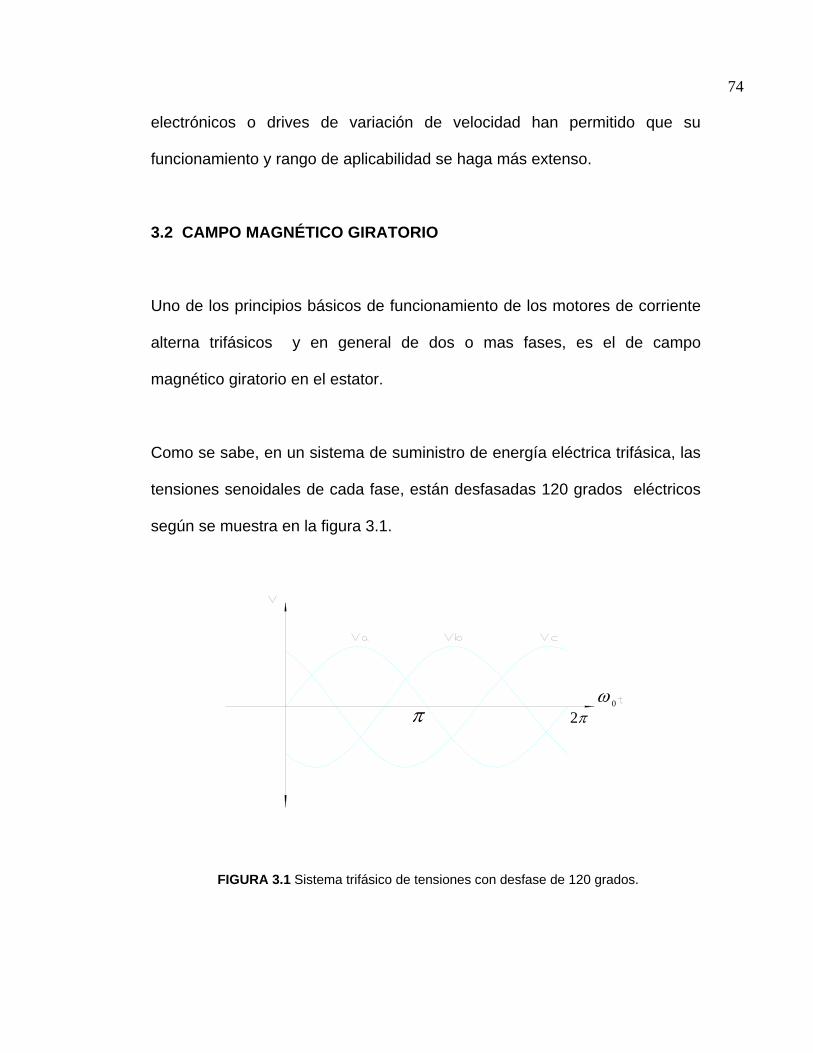
74
electrónicos o drives de variación de velocidad han permitido que su
funcionamiento y rango de aplicabilidad se haga más extenso.
3.2 CAMPO MAGNÉTICO GIRATORIO
Uno de los principios básicos de funcionamiento de los motores de corriente
alterna trifásicos y en general de dos o mas fases, es el de campo
magnético giratorio en el estator.
Como se sabe, en un sistema de suministro de energía eléctrica trifásica, las
tensiones senoidales de cada fase, están desfasadas 120 grados eléctricos
según se muestra en la figura 3.1.
02
FIGURA 3.1 Sistema trifásico de tensiones con desfase de 120 grados.
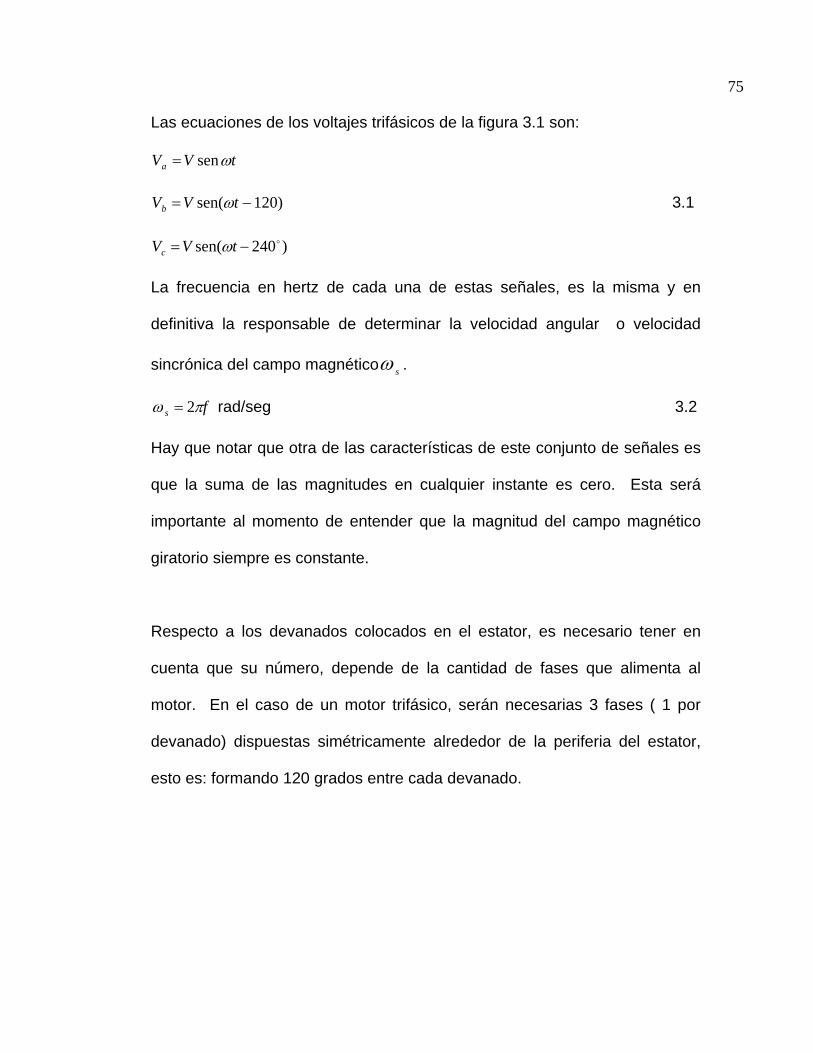
75
Las ecuaciones de los voltajes trifásicos de la figura 3.1 son:
tVVa sen
)120sen( tVVb 3.1
)240sen( tVVc
La frecuencia en hertz de cada una de estas señales, es la misma y en
definitiva la responsable de determinar la velocidad angular o velocidad
sincrónica del campo magnético s .
fs 2 rad/seg 3.2
Hay que notar que otra de las características de este conjunto de señales es
que la suma de las magnitudes en cualquier instante es cero. Esta será
importante al momento de entender que la magnitud del campo magnético
giratorio siempre es constante.
Respecto a los devanados colocados en el estator, es necesario tener en
cuenta que su número, depende de la cantidad de fases que alimenta al
motor. En el caso de un motor trifásico, serán necesarias 3 fases ( 1 por
devanado) dispuestas simétricamente alrededor de la periferia del estator,
esto es: formando 120 grados entre cada devanado.
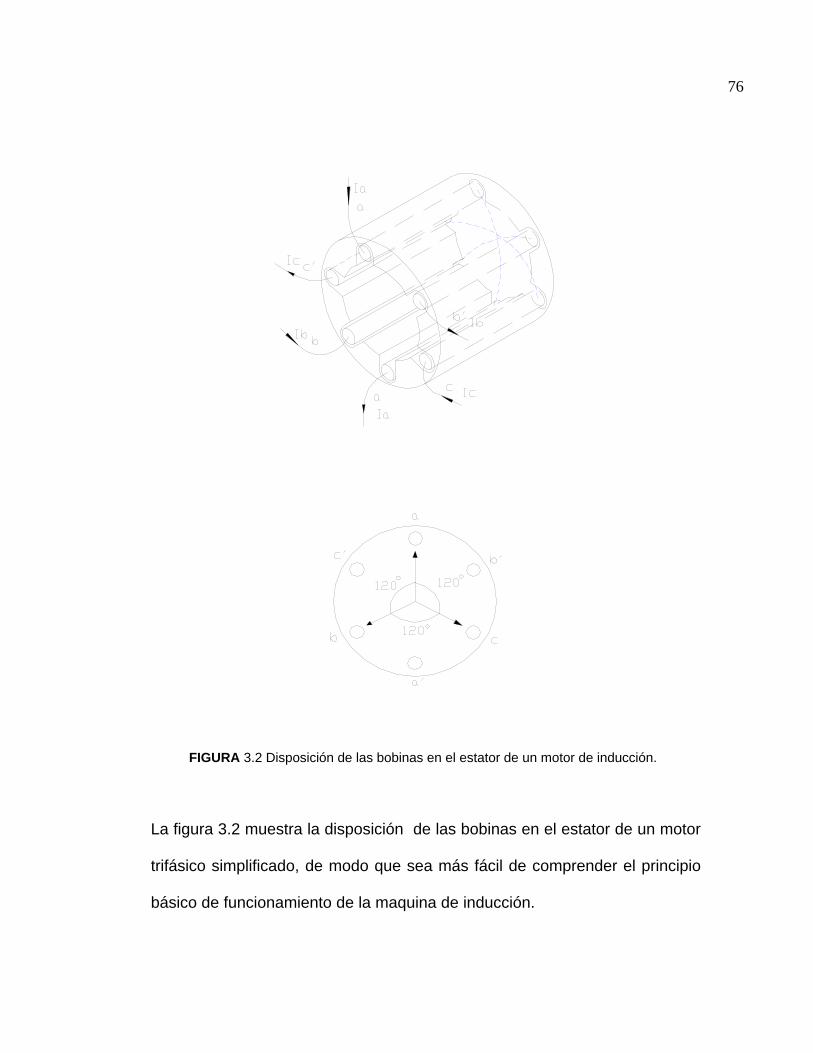
76
La figura 3.2 muestra la disposición de las bobinas en el estator de un motor
trifásico simplificado, de modo que sea más fácil de comprender el principio
básico de funcionamiento de la maquina de inducción.
FIGURA 3.2 Disposición de las bobinas en el estator de un motor de inducción.
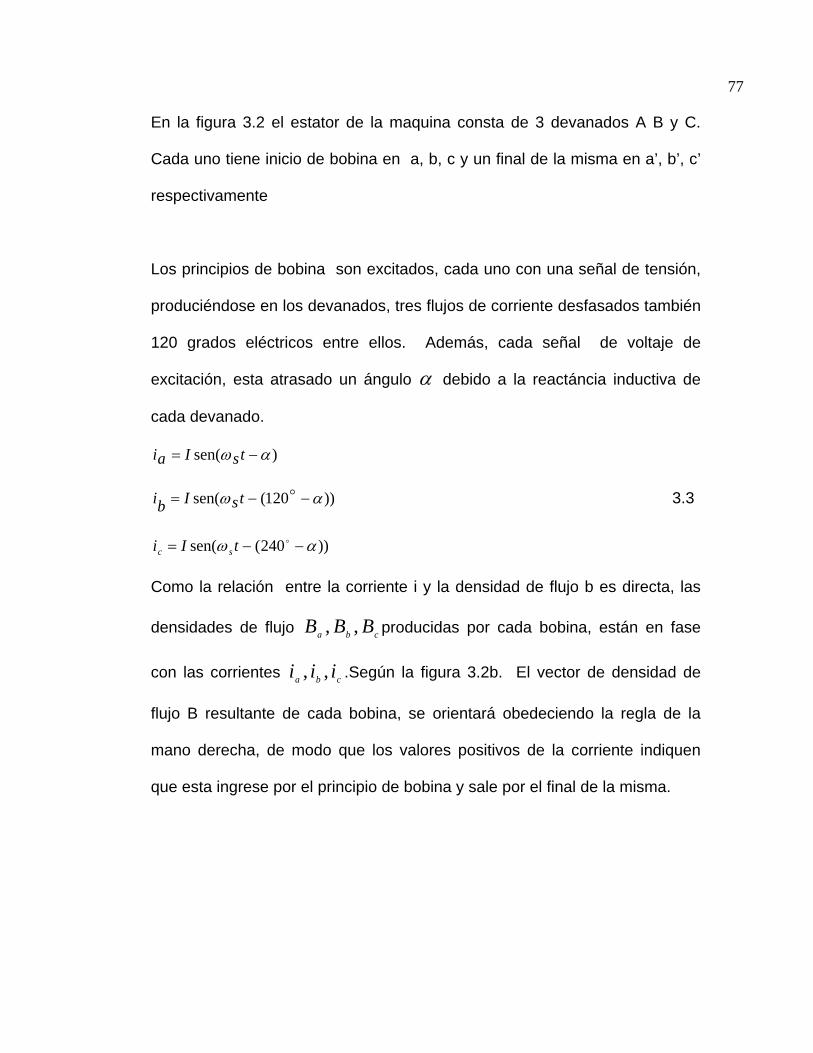
77
En la figura 3.2 el estator de la maquina consta de 3 devanados A B y C.
Cada uno tiene inicio de bobina en a, b, c y un final de la misma en a’, b’, c’
respectivamente
Los principios de bobina son excitados, cada uno con una señal de tensión,
produciéndose en los devanados, tres flujos de corriente desfasados también
120 grados eléctricos entre ellos. Además, cada señal de voltaje de
excitación, esta atrasado un ángulo debido a la reactáncia inductiva de
cada devanado.
)sen( tsIai
))120(sen( tsIbi 3.3
))240(sen( tIi sc
Como la relación entre la corriente i y la densidad de flujo b es directa, las
densidades de flujo cba BBB ,, producidas por cada bobina, están en fase
con las corrientes cba iii ,, .Según la figura 3.2b. El vector de densidad de
flujo B resultante de cada bobina, se orientará obedeciendo la regla de la
mano derecha, de modo que los valores positivos de la corriente indiquen
que esta ingrese por el principio de bobina y sale por el final de la misma.
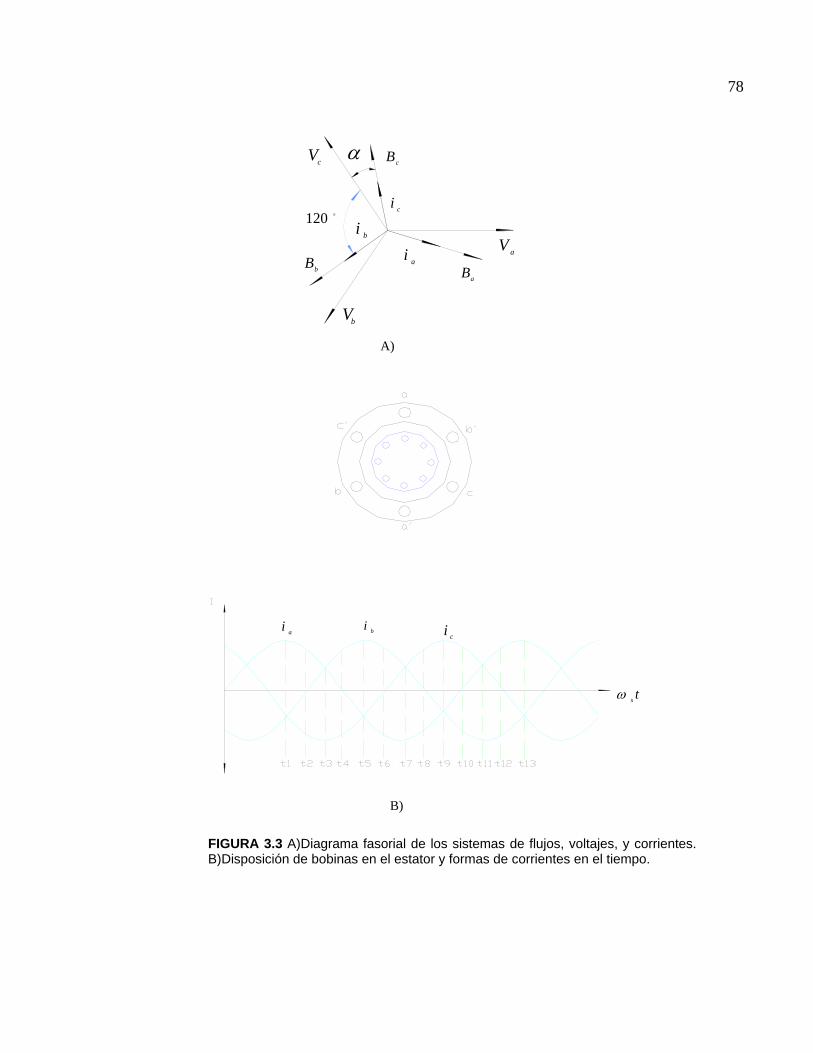
78
FIGURA 3.3 A)Diagrama fasorial de los sistemas de flujos, voltajes, y corrientes. B)Disposición de bobinas en el estator y formas de corrientes en el tiempo.
aibi
ci
aBbB
cB
120
cV
bV
aV
cibiai
ts
A)
B)

79
Al realizar un análisis instantáneo del comportamiento del campo magnético
se obtiene:
En t1: La corriente en la fase a tiene su máximo valor positivo.
La suma de las corrientes de las fases b y c es igual a la corriente en a pero
de signo contrario. Figura 3.4:
En t2: La magnitud de ai es igual a la de ci pero de signo contrario
bi es cero. El campo magnético resultante TB ha rotado 30 grados a una
velocidad s impuesta por la frecuencia de las señales de corriente. Figura
3.5.
FIGURA 3.4 Densidad de campo magnético en el estator en tiempo t1.
FIGURA 3.5 Densidad de campo magnético en el estator en tiempo t2.
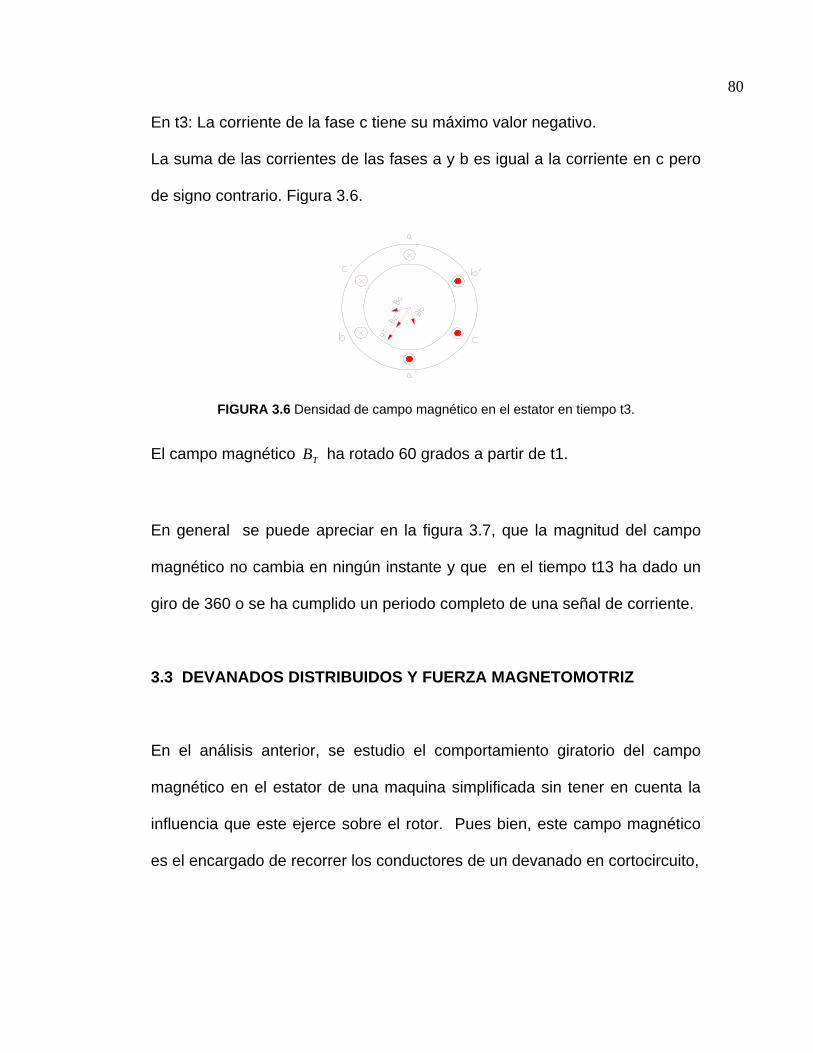
80
En t3: La corriente de la fase c tiene su máximo valor negativo.
La suma de las corrientes de las fases a y b es igual a la corriente en c pero
de signo contrario. Figura 3.6.
El campo magnético TB ha rotado 60 grados a partir de t1.
En general se puede apreciar en la figura 3.7, que la magnitud del campo
magnético no cambia en ningún instante y que en el tiempo t13 ha dado un
giro de 360 o se ha cumplido un periodo completo de una señal de corriente.
3.3 DEVANADOS DISTRIBUIDOS Y FUERZA MAGNETOMOTRIZ
En el análisis anterior, se estudio el comportamiento giratorio del campo
magnético en el estator de una maquina simplificada sin tener en cuenta la
influencia que este ejerce sobre el rotor. Pues bien, este campo magnético
es el encargado de recorrer los conductores de un devanado en cortocircuito,
FIGURA 3.6 Densidad de campo magnético en el estator en tiempo t3.
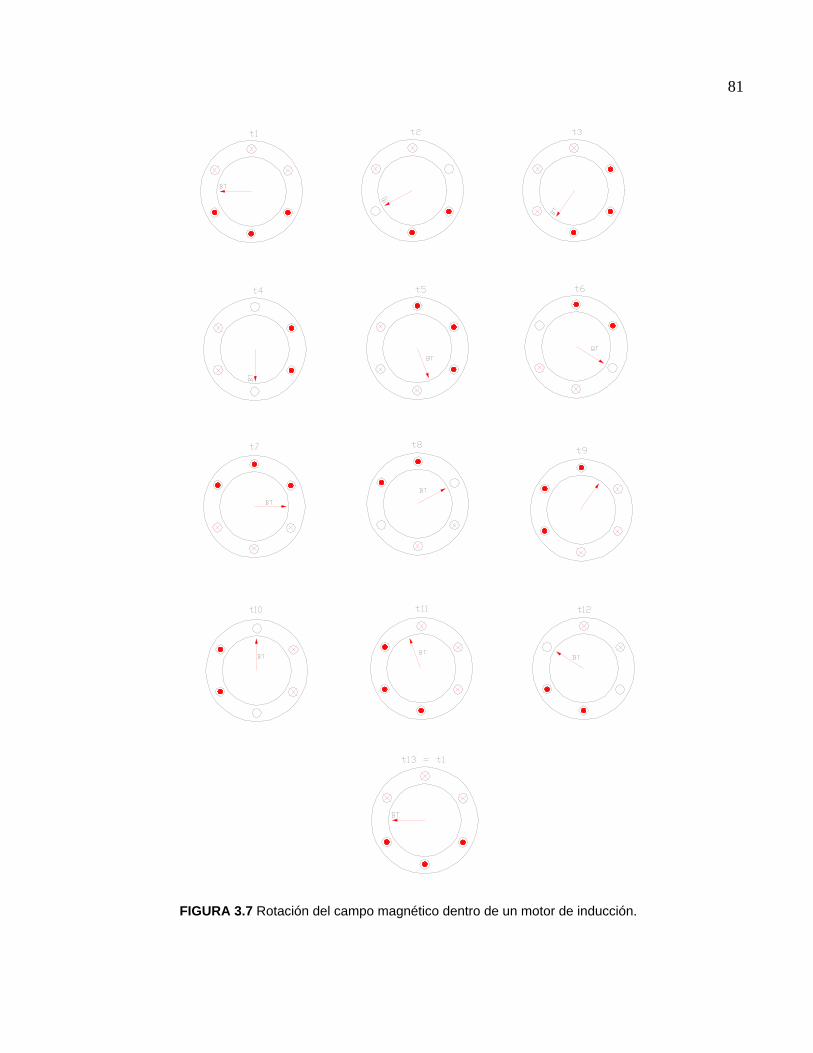
81
FIGURA 3.7 Rotación del campo magnético dentro de un motor de inducción.
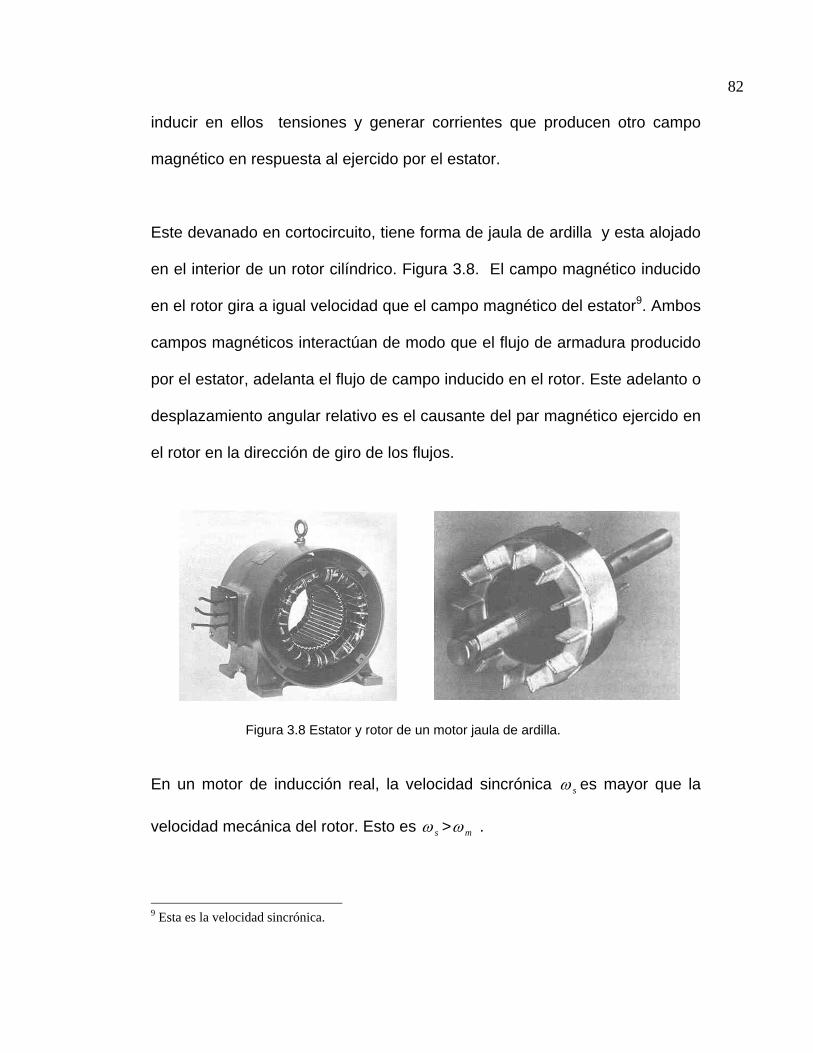
82
inducir en ellos tensiones y generar corrientes que producen otro campo
magnético en respuesta al ejercido por el estator.
Este devanado en cortocircuito, tiene forma de jaula de ardilla y esta alojado
en el interior de un rotor cilíndrico. Figura 3.8. El campo magnético inducido
en el rotor gira a igual velocidad que el campo magnético del estator9. Ambos
campos magnéticos interactúan de modo que el flujo de armadura producido
por el estator, adelanta el flujo de campo inducido en el rotor. Este adelanto o
desplazamiento angular relativo es el causante del par magnético ejercido en
el rotor en la dirección de giro de los flujos.
En un motor de inducción real, la velocidad sincrónica s es mayor que la
velocidad mecánica del rotor. Esto es s > m .
9 Esta es la velocidad sincrónica.
Figura 3.8 Estator y rotor de un motor jaula de ardilla.
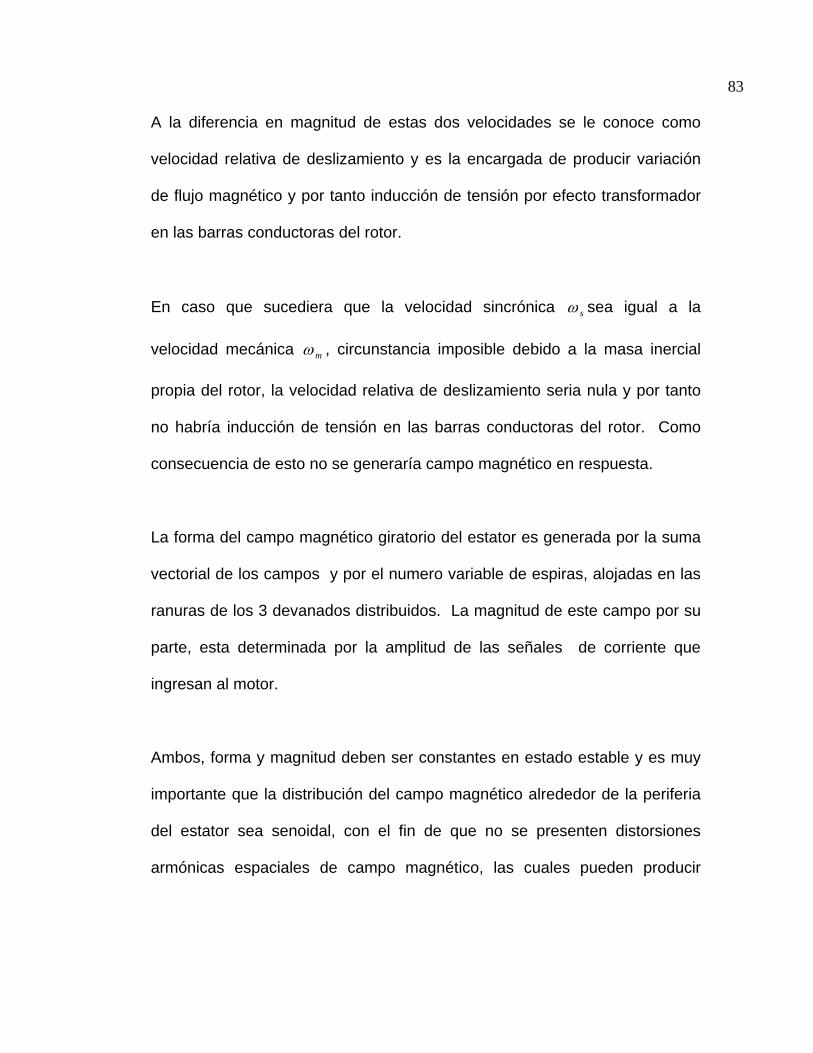
83
A la diferencia en magnitud de estas dos velocidades se le conoce como
velocidad relativa de deslizamiento y es la encargada de producir variación
de flujo magnético y por tanto inducción de tensión por efecto transformador
en las barras conductoras del rotor.
En caso que sucediera que la velocidad sincrónica s sea igual a la
velocidad mecánica m , circunstancia imposible debido a la masa inercial
propia del rotor, la velocidad relativa de deslizamiento seria nula y por tanto
no habría inducción de tensión en las barras conductoras del rotor. Como
consecuencia de esto no se generaría campo magnético en respuesta.
La forma del campo magnético giratorio del estator es generada por la suma
vectorial de los campos y por el numero variable de espiras, alojadas en las
ranuras de los 3 devanados distribuidos. La magnitud de este campo por su
parte, esta determinada por la amplitud de las señales de corriente que
ingresan al motor.
Ambos, forma y magnitud deben ser constantes en estado estable y es muy
importante que la distribución del campo magnético alrededor de la periferia
del estator sea senoidal, con el fin de que no se presenten distorsiones
armónicas espaciales de campo magnético, las cuales pueden producir
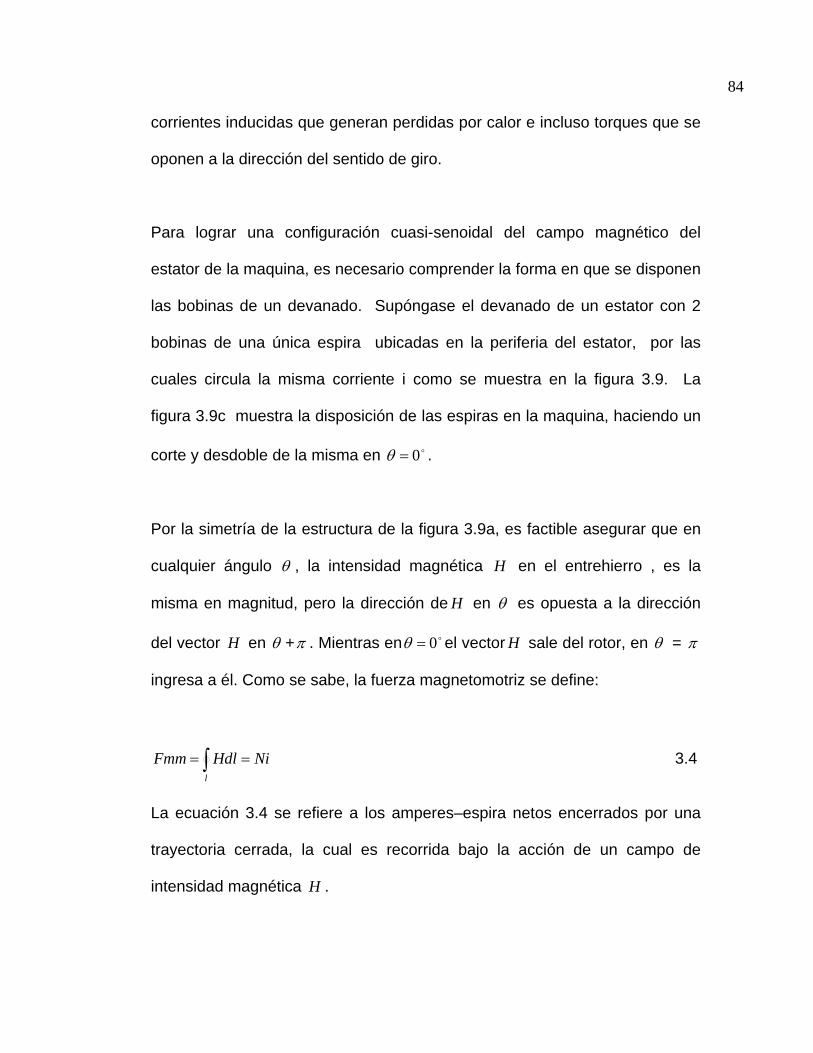
84
corrientes inducidas que generan perdidas por calor e incluso torques que se
oponen a la dirección del sentido de giro.
Para lograr una configuración cuasi-senoidal del campo magnético del
estator de la maquina, es necesario comprender la forma en que se disponen
las bobinas de un devanado. Supóngase el devanado de un estator con 2
bobinas de una única espira ubicadas en la periferia del estator, por las
cuales circula la misma corriente i como se muestra en la figura 3.9. La
figura 3.9c muestra la disposición de las espiras en la maquina, haciendo un
corte y desdoble de la misma en 0 .
Por la simetría de la estructura de la figura 3.9a, es factible asegurar que en
cualquier ángulo , la intensidad magnética H en el entrehierro , es la
misma en magnitud, pero la dirección de H en es opuesta a la dirección
del vector H en + . Mientras en 0 el vector H sale del rotor, en =
ingresa a él. Como se sabe, la fuerza magnetomotriz se define:
l
NiHdlFmm 3.4
La ecuación 3.4 se refiere a los amperes–espira netos encerrados por una
trayectoria cerrada, la cual es recorrida bajo la acción de un campo de
intensidad magnética H .
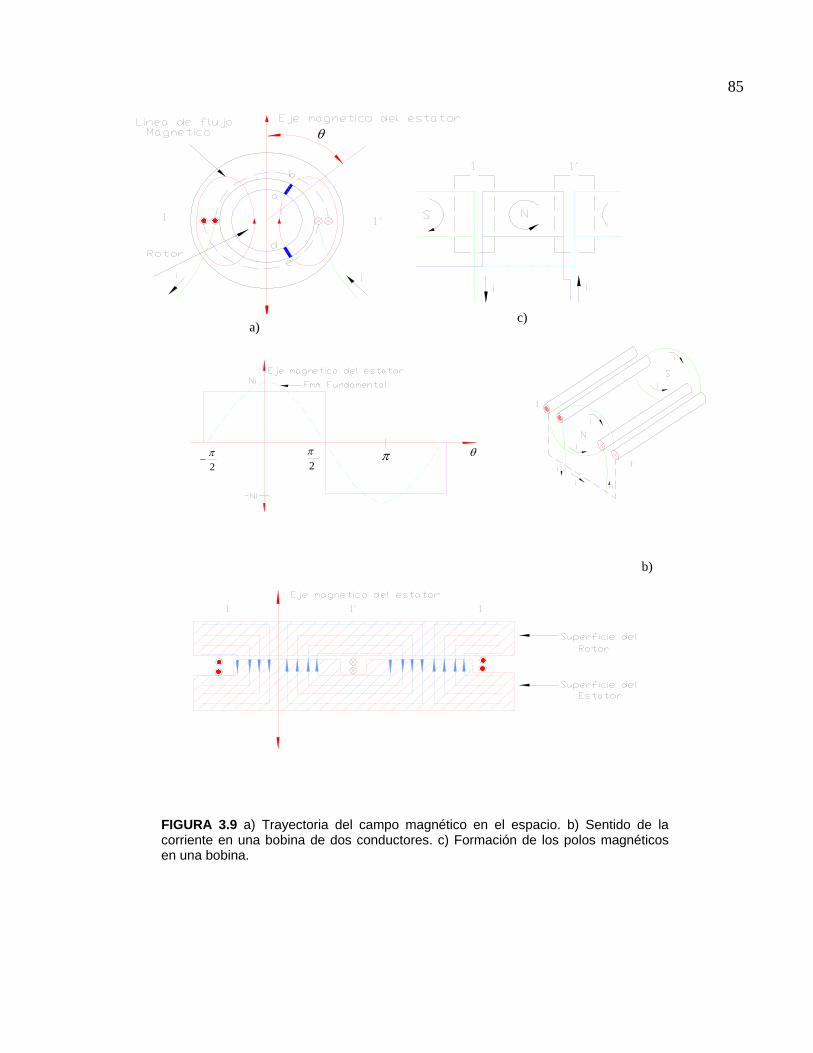
85
2
2
c) a)
b)
FIGURA 3.9 a) Trayectoria del campo magnético en el espacio. b) Sentido de la corriente en una bobina de dos conductores. c) Formación de los polos magnéticos en una bobina.
86
En un circuito magnético es importante el concepto de fuerza magnetomotriz,
ya que este se relaciona mediante el coeficiente geométrico l , con la
intensidad de campo magnético que existe a lo largo de este trayecto.
Al realizar un análisis de fuerza magnetomotriz alrededor de alguna de las
trayectorias cerradas indicadas como líneas de flujo en la figura 3.9 se tiene
que:
abcd
b
a
c
b
d
c
e
d
NiHdlHdlHdlHdlHdlFmm 2 3.5
La integral de línea por esta trayectoria es Ni2 , debido a que se efectúa en
el interior de 2 espiras, es decir N2 espiras recorridas por la corriente i . A
causa de que la reluctancia del hierro es muy pequeña comparada con la del
entrehierro, se desprecian las caídas de fuerza magnetomotriz asociadas al
núcleo. Por lo tanto la Fmm del circuito magnético queda:
b
a
d
c
NiHdlHdlFmm 2 3.6
Como la longitud del entrehierro es constante y la magnitud de H en ambos
costados de la misma trayectoria es igual se puede afirmar que:
b
a
d
c
HdlHdl 3.7
b
a
gHLHdl 3.8

87
Donde gL es la longitud del entrehierro. Por tanto la expresión de la Fmm
total es:
NiHLFmm g 22
En el trayecto a- b es equivalente a la Fmm del trayecto c-d pero de sentido
opuesto:
NiFmm ba
Y es equivalente a la Fmm del trayecto c-d pero en sentido opuesto.
NiFmm dc
Hasta el momento se ha logrado relacionar la amplitud de campo magnético
generado en el entrehierro por el devanado del estator, con la expresión de
fuerza magnetomotriz, de modo que al aumentar el numero de espiras N o
la corriente i , la intensidad del campo magnetico también aumenta :
gL
FmmH
gL
NiH
Por la proporcionalidad existente entre la densidad y la intensidad de campo:
HB
Donde es la permeabilidad del aire.

88
Eje de la fase AFmm fundamental
2
2
Ni2
Ni
Ni2
Ni
S N S
R o t o r
E s ta to r
FIGURA 3.10 Distribución de la fuerza magnetomotriz de un devanado de capa sencilla con dos bobinas por polo.
89
Se puede asegurar que el campo magnético B en el entrehierro aumenta
cuando el número de espiras o la corriente de los devanados se
incrementan:
gL
NiB
Como anteriormente se mencionó, la magnitud del campo magnético en el
entrehierro provocado por el estator, también depende del número de espiras
de las bobinas. Pero una vez alojadas en el estator, la magnitud de este
campo solo dependerá de la corriente que ingrese a ellas. Aunque no es el
objetivo profundizar en la forma que se bobinan estas máquinas, es
necesario mencionar que el tipo de devanado de la figura 3.9 es denominado
de doble capa, ya que en cada una de las ranuras, son alojados 2 grupos de
conductores de 2 distintas bobinas. La figura 3.10 muestra un devanado de
capa sencilla con 2 bobinas por polo (cuatro por fase).
La forma en escalones de la Fmm , no depende del tipo de devanado de la
máquina , si no del número de bobinas y la disposición de estas. Siendo mas
aproximada la onda de Fmm a la fundamental senoidal, cuanto mayor sea el
número de bobinas del devanado por polo. Como ya se mencionó esto
reduce los efectos de perdidas y torques indeseados producidos por los
armónicos de campo del estator.
90
En general la distribución de conductores en el estator de una máquina de
A.C ideal, tiene forma senoidal. De acuerdo a esta distribución de
conductores la magnitud de la Fmm alrededor del entrehierro es también
senoidal.
Como se trató anteriormente, sí en un estator se arreglan 3 devanados
ubicados cada uno a 120° y distribuidos en forma senoidal, la suma de las
Fmm producidas por estos devanados será senoidal. La figura 3.11, da la
idea de la disposición de los conductores del devanado de una fase en un
estator ideal. La densidad de conductores por polo por radian, ubicados en
la periferia del estator esta dada por la expresión:
sen2
sNa RadianpoloEsp 3.9
Donde sN es el número de espiras totales del devanado de una fase y 2 es
el número de polos. La densidad máxima de conductores 2
sNse obtiene
cuando 2
y este es el número de ellos que hace su mayor aporte a la
Fmm cuando 0 igual a 2
aaiNFmm .
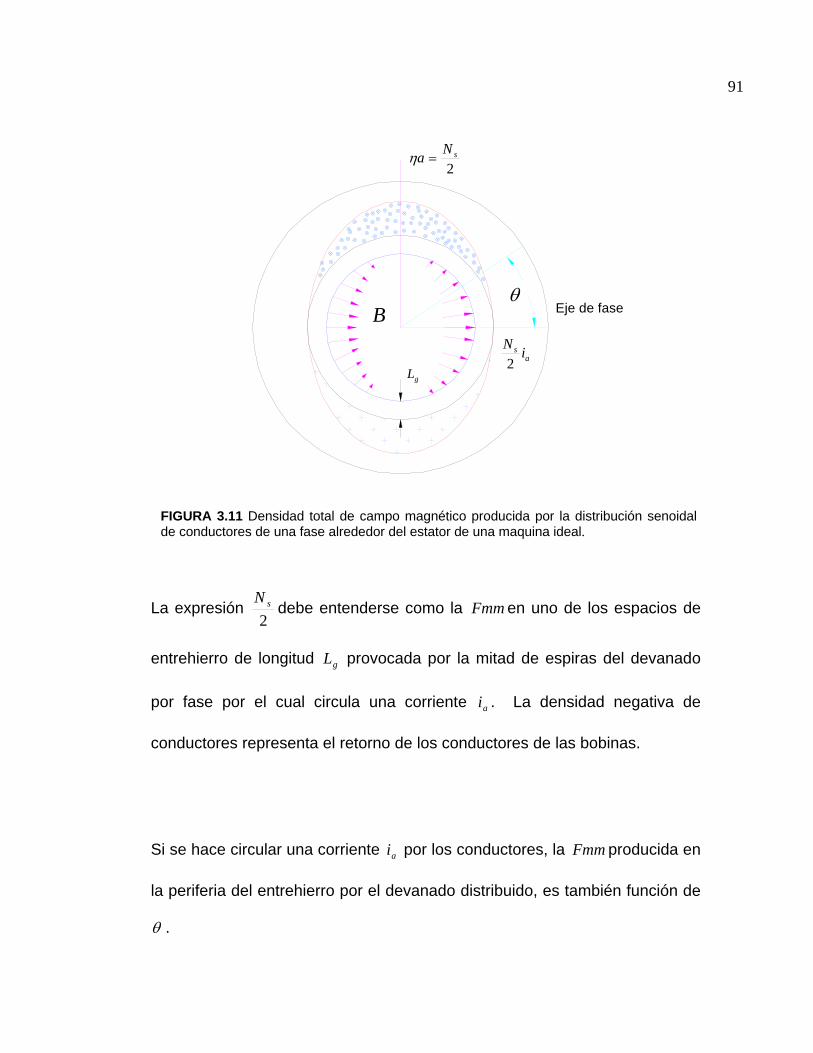
91
La expresión 2
sNdebe entenderse como la Fmm en uno de los espacios de
entrehierro de longitud gL provocada por la mitad de espiras del devanado
por fase por el cual circula una corriente ai . La densidad negativa de
conductores representa el retorno de los conductores de las bobinas.
Si se hace circular una corriente ai por los conductores, la Fmm producida en
la periferia del entrehierro por el devanado distribuido, es también función de
.
2sN
a
Eje de fase
as i
N2
gL
B
FIGURA 3.11 Densidad total de campo magnético producida por la distribución senoidal de conductores de una fase alrededor del estator de una maquina ideal.

92
diN
Fmm asg sen
2
La Fmm vista desde el rotor es:
diN
Fmm asg cos
2
Si es despreciable la caída de fuerza magnetomotriz en el hierro de la
máquina, la densidad de flujo en el entrehierro es:
cos20
g
as
L
iNB
Haciendo el análisis anterior en la fase b, la densidad de conductores da
como resultado:
3
2sen
2
sNb
Esta expresión representa la densidad de conductores de un devanado ideal
correspondiente a la fase b, el cual esta ubicado a 3
2 del devanado de la
fase a en un estator tambien ideal.
La densidad de conductores de la fase c, es por tanto:
93
3
4sen
2
sNc
El devanado de la fase c esta entonces ubicado a3
2 radianes de la fase b
y a 3
4radianes de la fase a en el estator.
Como en la practica no es posible tener un devanado senoidalmente
distribuido, se designa un numero de espiras equivalente 2
seN. El cual
generaría la fuerza magnetomotriz máxima de la componente fundamental
senoidal de la Fmm de un devanado en una maquina practica.
3.4 DEMOSTRACION ANALITICA DEL CAMPO MAGNETICO GIRATORIO
Como se comprobó empíricamente al inicio de este capitulo, el campo
magnético ejercido por los 3 devanados que componen un motor trifásico,
desfasados cada uno 120 grados en el estator y por los cuales circulan 3
corrientes también desfasadas 120 grados gira a una velocidad impuesta por
la frecuencia s de las señales de corriente.
94
En esta sección se hace un análisis mas detallado de las características de
este fenómeno recurriendo a matemáticas sencillas con el fin de demostrarlo.
Para esto se tendrá en consideración que la maquina funciona con un grupo
de señales de tensión y corrientes balanceadas y también que se encuentra
en estado estable.
El grupo de corrientes balanceadas que pasan por los devanados del
entrehierro tienen como magnitud máxima mi , donde este parámetro es la
componente de magnetización, encargada de transmitir la información
energética desde el estator hasta el rotor.
msma tii cos
3
2cos
msmb tii 3.10
3
4cos
msmc tii
Cada una de estas corrientes de devanado produce una fuerza
magnetomotriz cuya suma es igual a:
cbaT fmmFmmFmmFmm
Donde :

95
coscos2 msm
sa ti
NFmm
3
2cos
3
2cos
2
msms
b tiN
Fmm 3.11
3
4cos
3
4cos
2
msms
c tiN
Fmm
Esto es:
3
2cos
3
2coscoscos
2
msmsmse
T ttiN
Fmm
3
4cos
3
4cos
mst
Reduciendo la ecuación se obtiene que:
msmse
T tiN
Fmm cos4
3 3.12
Lo que esta expresión dice es que la fuerza magnetomotriz del estator es
variable con el tiempo de acuerdo a la variable t y también en el espacio de
acuerdo a la variable . Por lo tanto su comportamiento es similar al de una
onda cuya máxima amplitud esta dada por el máximo valor de la corriente o
sea mi . La magnitud máxima de la onda se obtiene cuando el ángulo es
igual a: ms t
s
96
Tal como se efectuó en el análisis de la maquina de corriente continua, es
posible interpretar el devanado de cada fase por la cual circula una corriente i
como una lamina cilíndrica inmersa en el estator que rota con el tiempo a una
velocidad s (figura3.12). Cuya densidad de corriente en amperios por radian
es:
sen2
asaiaa
iNiK rad
Amp
Es posible expresar la longitud de arco s como r veces el ángulo en radianes.
Esto permite que la densidad de corriente a lo largo del arco s pueda ser
representado linealmente así:
senr
iK aa
a mtAmp
Entonces la densidad de corriente lineal producida por los 3 devanados es:
97
ccbbaaT iiir
K 1
3
2cos
3
2sencossen
2
msmsmse
T ttr
iNK
3
4cos
3
4sen
ms t
Simplificando se obtiene:
msmse
T tr
iNK sen
4
3 mtAmp 3.13
La expresión corresponde a la onda de densidad de corriente que produce el
campo magnético en el entrehierro y presenta las mismas características de
la expresión TFmm , con la diferencia de que la densidad lineal de corriente
esta adelantada respecto a la TFmm un ángulo de 2
.
Las corrientes que circulan a través de cada devanado se pueden
representar por medio de números complejos, lo que permite hacer un
análisis más sencillo de comportamiento del campo magnético producido en
la maquina. La función de corriente de la fase a en valor rms es:
msm
a ti
i cos2
Esta corresponde a la componente real del fasor de corriente:
98
msmsm
a tjti
I sencos2
La magnitud de este fasor corresponde al valor máximo efectivo de la
corriente de magnetización (2
mi ). Cabe notar que este fasor gira a
velocidad angular s y en el instante t=0 esta en atraso un ángulo ( m )
(figura 3.13). Según la identidad de euler:
mstmm eiI 3.14
Como en el sistema de la figura 3.13 todos los fasores rotan a s (rad /seg),
puede obviarse el termino tse , quedando el fasor estático en el sistema y
representado por la expresión compleja:
mei
I mm
2
mm
m
iI ,
2 A
Así como la corriente mi puede ser representada por un número complejo
partiendo de una función senoidal cuya magnitud varia en el tiempo.
)cos(2 m
mi
)sen(mij m
99
La densidad de corriente lineal alrededor de la lamina cilíndrica TK y la
TFmm en el estator pueden ser también representadas en esta forma, pero a
diferencia de la función de corriente de magnetización, la densidad TK y la
TFmm están distribuidas en el espacio por tanto a este tipo especial de fasor
se le conoce como vector espacial.
Similar al análisis de la corriente para condiciones de estado estable, se
define la magnitud del vector con el valor pico de cada onda dividido entre
2 .
La fuerza magnetomotriz expresada en forma de vector espacial queda:
FIGURA 3.13 Composición fasorial de la corriente magnetizante mI .
100
TFmm mstjms eiN
4
3
Según la identidad de euler:
mstjmsT e
iNFmm
4
3 3.15
3.5 COMPORTAMIENTO MAGNETICO DE LA MAQUINA DE INDUCCION
Se entiende como régimen de vacío al funcionamiento de la maquina sin
carga alguna acoplada a su eje. Bajo esta condición casi no se presenta
transformación de energía electromecánica, ya que una mínima cantidad de
torque es necesaria para contrarrestar el efecto de un pequeño par
suministrado por el rozamiento que se produce en los rodamientos.
Como se menciono anteriormente, en la maquina de inducción cualquiera
que sea su funcionamiento, siempre habrá una onda de mmF giratoria de
velocidad sincrónica, creada por las corrientes que circulan por el devanado
del estator y una onda de mmF también giratoria, a la misma velocidad
sincrónica y sentido, creada por las corrientes inducidas en el rotor. Antes de
realizar un análisis del comportamiento de variables como la fuerza
magnetomotriz y flujo magnético entre otros, es necesario considerar que las
ondas de campo magnético que giran a velocidad sincrónica, producidas por
101
el estator y rotor son perfectamente senoidales, es decir, que no contienen
armónicos. Además de esto se debe tener en cuenta que la maquina no está
saturada, que está siendo alimentada por un sistema de tensiones
balanceado y que se encuentra trabajando en régimen de estado estable.
Con esto, magnitudes como las anteriormente mencionadas, pueden ser
representadas por vectores.
Se realiza conversión de energía electromecánica cuando es aplicado un
torque en el eje de la maquina. Si el torque impuesto está en la dirección
contraria al sentido de la rotación del campo, la maquina funciona como
motor. A medida que se aumenta el torque de carga, la potencia de salida
exigida al motor rcsalP aumenta, la velocidad del rotor disminuye y el
deslizamiento S aumenta. sr .
Entiéndase como deslizamiento la relación entre la diferencia de la velocidad
sincrónica del campo con la velocidad del rotor y la velocidad sincrónica. Es
decir:
s
rsS
Como se mencionó anteriormente, este deslizamiento es mayor que cero
cuando la maquina funciona en régimen motor. Para el funcionamiento como
102
generador, el momento exterior tiene que estar dirigido en el sentido de
rotación del campo. A medida que se aumenta el par mecánico, la potencia
eléctrica suministrada desde la maquina hacia la red, aumenta y el
deslizamiento se hace negativo ya que la velocidad del rotor se hace mayor
que la velocidad del campo magnético.
Cuando la maquina esta funcionando en vacío, la corriente que circula por el
estator tiene un valor entre 0.5 y 0.3 veces la corriente de plena carga. Bajo
esta condición se puede comparar el funcionamiento del motor al de un
transformador con el secundario abierto. La mayor parte de la corriente que
exige el motor a la red es corriente que circula por el ramal de excitación del
circuito equivalente y una pequeña corriente necesaria para contrarrestar el
efecto producido por el par de fricción y el par de ventilación.
La corriente que circula por el estator es en su mayoría empleada en la
creación del flujo de magnetización que atraviesa al entrehierro y llega hasta
el rotor. Aunque la potencia aparente exigida por la maquina no es muy
grande, los requerimientos de potencia reactiva necesarios para la creación
del flujo de magnetización, son considerablemente más grandes a los de
potencia activa necesarios para cubrir la ventilación, perdidas por fricción y
perdidas en el hierro del estator.
103
El factor de potencia al funcionar sin carga es muy bajo10 y la eficiencia es
casi nula debido a que la potencia de salida es mínima. Por lo general no es
muy tenido en cuenta que debido a la pequeña circulación de corriente de
vacío en el estator, se presentan perdidas de potencia activa en forma de
calor en la resistencia del devanado y que una pequeña parte de la potencia
reactiva, corresponde al flujo de dispersión en las bobinas del estator.
Cuando se carga el eje del motor, el deslizamiento aumenta y el rotor
reacciona haciendo cambiar el flujo mutuo de magnetización. La fuerza
magnetomotriz creada en el rotor se opone a la impuesta por el estator. Las
componentes de fuerza magnetomotriz del estator y rotor se suman
vectorialmente, generando como resultado un vector de fuerza
magnetomotriz resultante, que impulsa un flujo equivalente al de
magnetización. Si actuara solo, la onda de fuerza magnetomotriz producida
por el estator, determinaría el flujo 11 que tiene como componentes al flujo
12 que atraviesa al entrehierro y concatena al devanado del rotor y la otra
componente es el flujo de dispersión 1 del devanado estator, el cual no
llega al rotor.
Esto es:
11211 3.16
10 Por lo general de aproximadamente 0.2 para maquinas pequeñas y 0.05 para grandes maquinas.
104
Aunque la frecuencia de las corrientes en el rotor no son las mismas que en
el estator, la velocidad del campo magnético producido por el devanado rotor
es la misma velocidad sincrónica.
La fuerza magnetomotriz del estator excita al rotor, el cual produce un flujo
22 en respuesta que se compone, al igual que en el estator, de un flujo que
llega hasta el estator denominado 21 y otra componente que es la del flujo
de dispersión del rotor 2 , el cual no concatena el devanado estator.
Esto es:
22122 3.17
El vector de fuerza magnetomotriz resultante no esta del todo en fase con el
vector de flujo de magnetización m común a ambos devanados. Esto
debido a la consideración de las perdidas del hierro de la maquina, las cuales
introducen una componente de fuerza magnetomotriz pequeña normal a la
dirección del flujo de magnetización.
En la figura 3.14 se observa un diagrama en el espacio de la maquina de
inducción funcionando como motor.
El ángulo que forman la fuerza magnetomotriz resultante mmrF con el flujo de
magnetización es denominado ángulo de perdidas.
105
El flujo de magnetización esta encargado de generar la tensión de
autoinducción en cada fase cuyo valor eficaz esta determinado por:
mdev fNKE 1111 44.4 3.18
Donde:
1144.4 NKdev es una constante de construcción de la maquina y 1f es la
frecuencia en hertz suministrada por la red. La frecuencia de esta señal es la
misma frecuencia de la señal de tensión de entrada.
En cada fase del rotor la fem autoinducida tiene una frecuencia menor,
distinta a la frecuencia del estator, esto es:
21222 44.4 SEfNKSE mdevs 3.19
Si 2E es la tensión del rotor bloqueado la tensión 2SE es la tensión inducida
a frecuencia 12 Sff por el flujo del estator.
En diagrama fasorial temporal de la figuras 3.16 y 3.17 se observan el
comportamiento de los fasores de la maquina en vacío y bajo carga.
Cuando la maquina funciona con carga en su eje la potencia reactiva que
produce el flujo de magnetización común a los devanados y los flujos de
dispersión, es ligeramente mayor que cuando la maquina esta funcionando
en vacío.
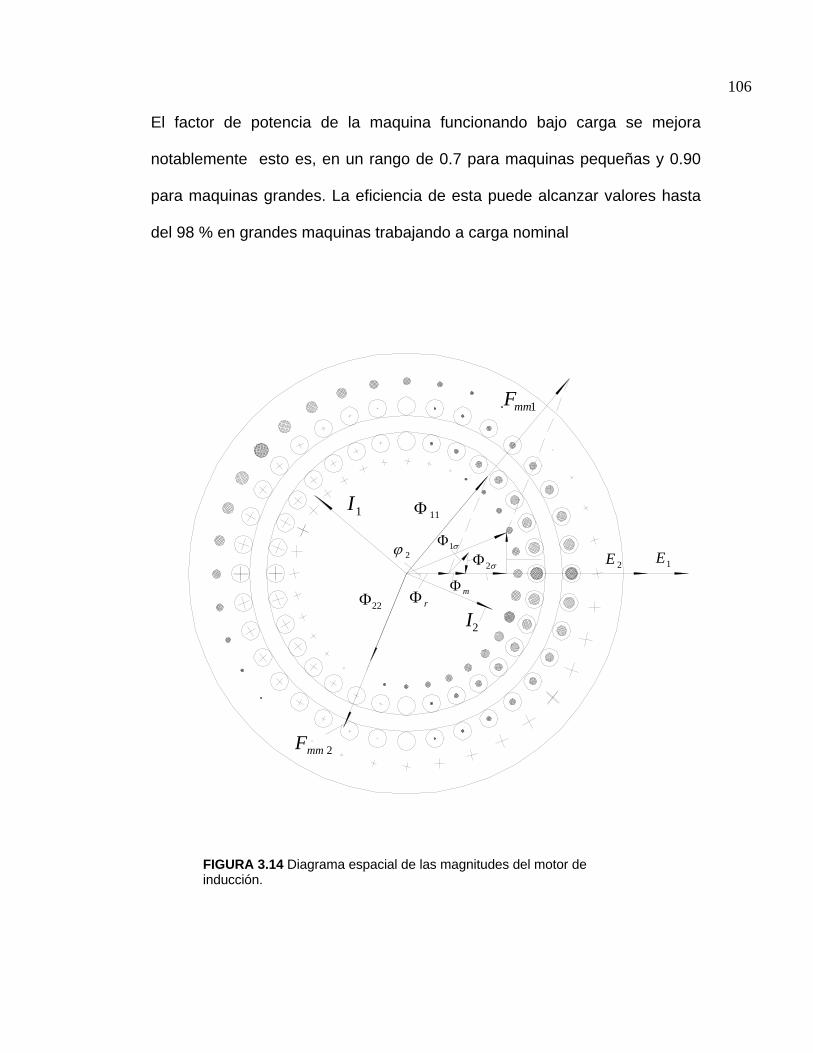
106
El factor de potencia de la maquina funcionando bajo carga se mejora
notablemente esto es, en un rango de 0.7 para maquinas pequeñas y 0.90
para maquinas grandes. La eficiencia de esta puede alcanzar valores hasta
del 98 % en grandes maquinas trabajando a carga nominal
1I
2I
2mmF
11
22
1mmF
1
2
r m
22E 1E
FIGURA 3.14 Diagrama espacial de las magnitudes del motor de inducción.
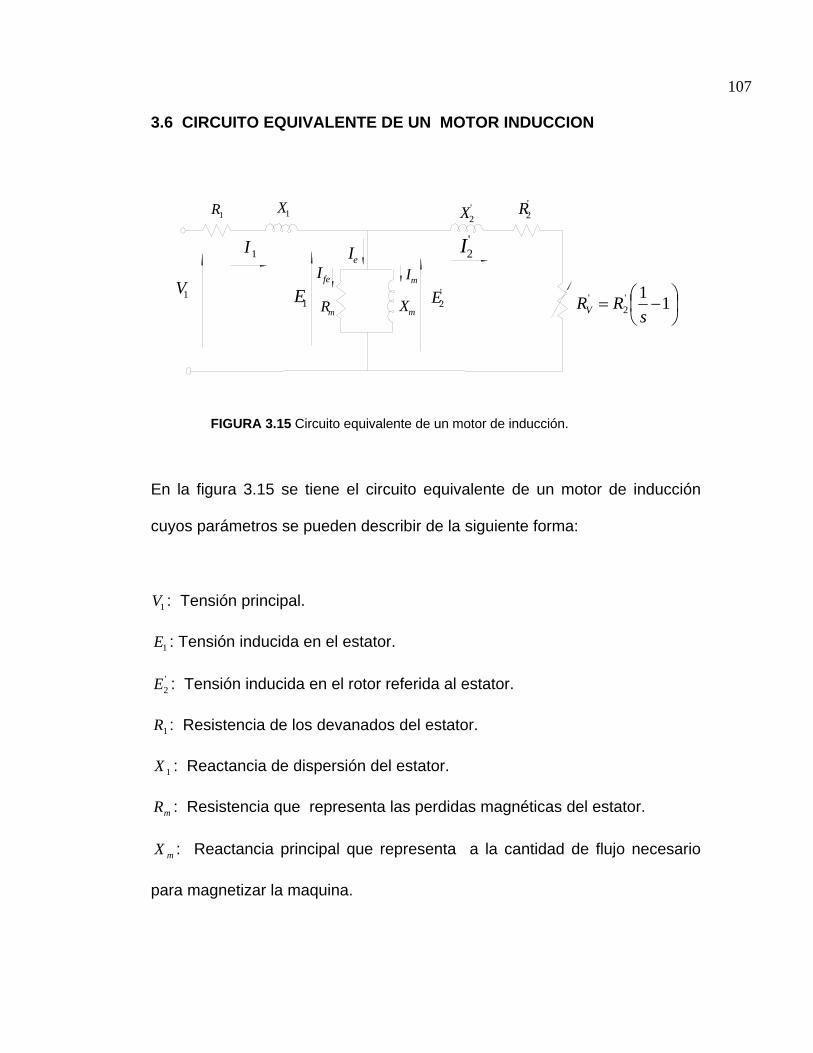
107
3.6 CIRCUITO EQUIVALENTE DE UN MOTOR INDUCCION
En la figura 3.15 se tiene el circuito equivalente de un motor de inducción
cuyos parámetros se pueden describir de la siguiente forma:
1V : Tensión principal.
1E : Tensión inducida en el estator.
'2E : Tensión inducida en el rotor referida al estator.
1R : Resistencia de los devanados del estator.
1X : Reactancia de dispersión del estator.
mR : Resistencia que representa las perdidas magnéticas del estator.
mX : Reactancia principal que representa a la cantidad de flujo necesario
para magnetizar la maquina.
1R 1X
1V '2E
'2X
mR mX
'2R
1
1'2
'
sRRV
'2I1I
feImI
eI
1E
FIGURA 3.15 Circuito equivalente de un motor de inducción.
108
mX : Reactancia de dispersión del rotor.
'2R : Resistencia de los devanados del rotor o de las barras que conforman
la jaula, referida al estator.
R
S2 : Resistencia dinámica. Es un parámetro por medio del cual se
representan los efectos del deslizamiento en la maquina.
'2X : Reactancia del rotor referida al estator.
1I : Corriente de estator.
'2I : Corriente del rotor referida al estator.
eI : Corriente de excitación.
mf II , : Corriente de perdidas del hierro y corriente de magnetización.
S : Deslizamiento del rotor. Representa la relación entre la velocidad
sincrónica y la velocidad del rotor.
s
rsS
3.20
s : Velocidad sincrónica del campo magnético del estator.
p
fs
12 3.21
r : velocidad del rotor.
1f : frecuencia del sistema.
p : pares de polos de la maquina.
109
El circuito equivalente del motor de inducción cuando se encuentra en
reposo, se asemeja al de un transformador con secundario en cortocircuito,
por lo cual se aplican las mismas ecuaciones para modelarlo.
Para llegar a la configuración del circuito presentado en la figura 3.15 se
parte de un análisis del flujo mutuo, resultante de la interacción de los flujos
producidos por el estator y por el rotor, el cual produce las fem inducidas. Se
tiene en cuenta también los flujos de dispersión, que se representan a través
de las reactancias de dispersión.
La primera ecuación describe las caídas de tensión del estator:
111111 IjXIREV 3.22
Cada una de las tensiones de la ecuación anterior puede ser representada
por un fasor.
El signo menos de E1 indica que es una fuerza contraelectromotriz inducida
según la ley de Lenz.
La ecuación que describe al rotor cuando se encuentra en reposo es:
222220 IjXIRE 3.23
Cuando el rotor se coloca en movimiento se considera para efecto de
modelado, que aparece el parámetro deslizamiento S . En este aspecto la
110
ecuación que describe la estator no cambia, pero la ecuación del rotor se
reforma, al aparecer valores afectados por el deslizamiento como
sss fXE 222 ,, .
Con lo anterior la ecuación del rotor es:
2222 )(0 IXRSE
Al dividir entre S :
222
2 )(0 IXS
RE 3.24
La ecuación obtenida presenta la aparición de una resistencia dinámica S
R2
que es ficticia y que describe los efectos del deslizamiento.
Bajo la condición de 1S se aprecia que la resistencia ficticia S
R2 es mayor
a la resistencia existente en el reposo correspondiente a la resistencia de los
conductores que componen el devanado del rotor.
Para representar los efectos del movimiento y del reposo con un único
modelo del motor, la resistencia conectada al secundario del circuito
modelado debe ser el resultado de la diferencia entre la resistencia cuando
111
del secundario cuando la maquina esta en reposo y la resistencia cuando
esta en movimiento.
Esto es:
1
12 S
RRV
Esta resistencia obtenida es variable, siendo cero cuando 1S , es decir
cuando el rotor esta parado y muy grande cuando 1S , condición que se
presenta cuando la maquina funciona cercana al vacío. Con lo cual, la
ecuación del rotor se expresa así:
22222 IRIjXRE V 3.25
Como en los transformadores, el circuito del rotor (secundario) puede ser
referido al estator ( primario). Para lograr esta condición en el motor, se
deben representar los parámetros referidos multiplicados por una relación
entre factores de devanado y numero de espiras del estator respecto del
rotor, por lo anterior las tensiones inducidas serán:
mdev
mdev
NK
NK
E
E
E
E
22
11
1
'2
2
1
44.4
44.4
1'2 EaE T 3.26
La tensión '2E representa el equivalente de la tensión 1E multiplicada por una
relación de tensiones Ta .

112
En el caso de las corrientes, debe existir una corriente '2I referida al estator
que al ser multiplicada por 1N , produce la misma fuerza magnetomotriz de la
corriente del rotor multiplicada por 2N .
'22 mmmm FF
'21112222 INKmINKm devdev
1m : numero de fases del estator.
2m : numero de fases del rotor.
Al despejar la corriente del rotor referida al estator se obtiene:
Tam
mI
I
2
12
'2 1
ia
II 2'
2 3.27
ia es la relación de corrientes.
Los otros parámetros del rotor referidos al estator se representan así:
iT aaXX 2'2
iT aaRR 2'2
Si se aproximan a un valor muy similar, las relaciones de tensiones y
corrientes, las anteriores ecuaciones se pueden representar como sigue:
22
'2 aXX
22
'2 aRR
113
La resistencia variable 'VR referida al estator es:
1
1'2
'
SRRV
La ecuación del rotor referido al estator es igual a la expresión obtenida
inicialmente, solo que cada parámetro se afecta por las relaciones de
tensiones y corrientes.
'2
''2
'2
'2
'2 IRIjXRE V 3.28
El análisis realizado hasta el momento permite representar al motor de
inducción con el circuito de la figura 3.15.
Se destaca en el modelo del motor una rama de magnetización compuesta
por una resistencia mR que representa las perdidas en el hierro, y una
reactancia mX que representa el flujo que magnetomotriz a la maquina.
Como el flujo mutuo se mantiene aproximadamente constante cualquiera que
sea la condición del motor, se puede trasladar la rama magnetizante a la
entrada del circuito equivalente y representar este flujo como un parámetro
producido por una tensión de entrada 1V constante11. Con lo anterior el
circuito equivalente del motor puede ser reformado y presentado de la
siguiente manera.
11 Esta condición de tensión constante permite un primer análisis de la estructura de los convertidores de frecuencia, en el capitulo quinto.

114
3.6.1 Condiciones de vacío y carga. Cuando la corriente del motor
aparece en condiciones de carga, se establece una relación vectorial entre
las fuerzas magnetomotrices del estator y del rotor, que origina una fuerza
magnetomotriz resultante que se debe mantener constante:
21 mmmmmmr FFF
222211211111 INKmINKmINKm devdevedev
Despejando la corriente 1I se obtiene:
ie a
III 2
1
1E
101 IR
101 IX
10I'20I
mI
feIeI
m
'202 IR
'202 IX
2E
1E
1
2'20I
FIGURA 3.16 Diagrama fasorial de la maquina de inducción sin carga.
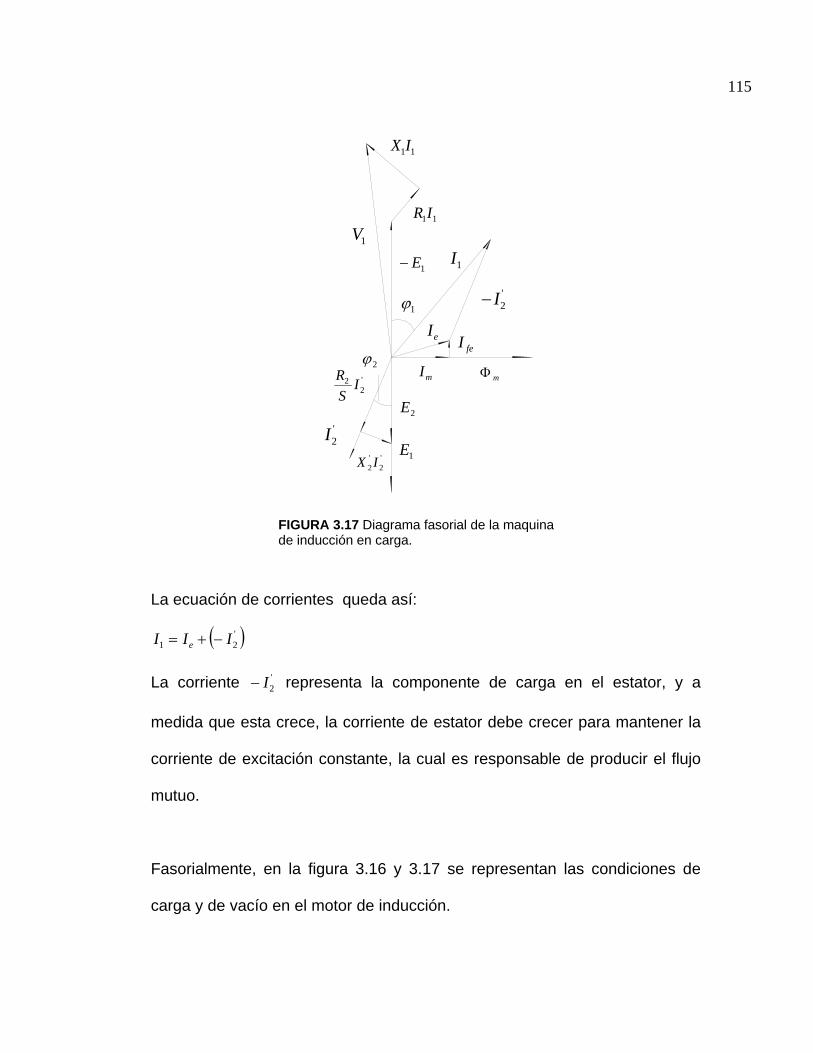
115
La ecuación de corrientes queda así:
'21 III e
La corriente '2I representa la componente de carga en el estator, y a
medida que esta crece, la corriente de estator debe crecer para mantener la
corriente de excitación constante, la cual es responsable de producir el flujo
mutuo.
Fasorialmente, en la figura 3.16 y 3.17 se representan las condiciones de
carga y de vacío en el motor de inducción.
m'2
2 IS
R
'2I
'2
'2IX
2
1
1I
'2I
eI
mI
feI
11IR
11IX
1V
1E
2E
1E
FIGURA 3.17 Diagrama fasorial de la maquina de inducción en carga.
116
En la figura anterior se puede apreciar las siguientes condiciones:
La corriente de estator es producida por la suma fasorial entre la corriente
'2I e eI .
Los fasores de corriente fI e mI representan respectivamente las perdidas
en el hierro y la corriente que origina el flujo que magnetiza a la maquina.
La tensión 1V es la suma fasorial de la caída de tensión en la impedancia del
estator y la fuerza contraelectromotriz 1E .
La corriente '2I aparece desfasada 90 grados eléctricos de la tensión '
2E
debido a la impedancia del rotor.
Los ángulos 1 y 2 representan los factores de potencia del estator y del
rotor, ambos de comportamiento antagónico, es decir, que en condiciones de
carga el factor de potencia del rotor decrece y el factor de potencia del
estator mejora. En vacío sucede lo contrario.
En vacío se puede considerar la aparición de una corriente inducida '20I muy
pequeña al estar el rotor en cortocircuito.
'2010 III e
117
El ángulo 2 de la corriente del rotor en vacío respecto a la tensión '2E es
pequeño, debido a la baja reactancia del rotor.
La corriente de estator en vacío es en su mayoría la responsable de
mantener magnetizada la maquina de inducción, es decir si se desprecia la
corriente '20I se puede afirmar que:
eII 10
En ambas condiciones de vacío y de carga las tensiones 1E y 2E están en
fase al ser producidas por un mismo flujo común.
3.6.2 Descripción de las características mecánicas. La potencia eléctrica
que entra en los devanados del estator:
cos3 11IVPe 3.29
La potencia que refleja las primeras perdidas será, la consumida en el
devanado de cobre del estator y se representa como:
121Re 3 RIP 3.30
Luego se debe de restar de la potencia inicial de entrada las perdidas
magnéticas que se presentan en el hierro:
mm R
VP
213
3.31
118
El proceso de transformación de energía, continua con la potencia que
atraviesa el entrehierro y que es entregada por el campo magnético del
estator:
s
RIPg
2223 3.32
Se puede observar de la ecuación anterior que la potencia gP se consume
en la resistencia de deslizamiento s
R2 .
La potencia de entrehierro también se puede dividir en dos componentes, la
primera hace referencia a la potencia que el motor entrega al eje y la
segunda será la potencia de perdidas en el cobre del rotor:
Rrsalg PPP 3.33
Teniendo la potencia mecánica de salida en el eje del motor como:
rmsalP 3.34
Al mismo tiempo la potencia de perdidas del rotor es:
sRr RIP 223 3.35
Reemplazando en la Ecuación 3.34 y considerando el torque de perdidas
despreciable:
m
222
222 33 RI
s
RI r

119
s
sRI
r
13 2
22 3.36
De la ecuación 3.15 se obtiene:
rsss
ssr 1 3.37
Esta expresión 3.37 se reemplaza en la ecuación 3.36, con lo cual el torque
queda:
s
RI
2
223
3.38
La corriente del rotor '2I a partir del circuito equivalente de la figura 3.18 es:
1V mR mX
1R 1X '2R '
2X
11'
2'
SRRV
FIGURA 3.18 Circuito equivalente del motor de inducción para un voltaje de entrada y un flujo constante.

120
2'21
2'2
1
1'2
XXS
RR
VI
Si esta expresión se reemplaza en al ecuación 3.38 la característica
mecanica se puede representar mediante la siguiente ecuación matemática:
2
21
2'2
1
22
13
XXs
RRs
RV
s
3.39
En el gráfico de la figura 3.19 se aprecia el comportamiento que describe la
ecuación 3.39.
Con el análisis resultante de esta ecuación se puede concluir:
El torque desarrollado depende del cuadrado de la tensión y directamente de
la resistencia del rotor. También se debe detallar la relación inversa entre el
torque y el deslizamiento.
En la figura 3.19 se aprecia que existen dos puntos máximos donde se
presentan los valores máximos posibles de torque en el motor y ocurren a los
llamados deslizamientos críticos.
Para hallar el valor de deslizamiento critico se debe derivar la ecuación 3.39
e igualar a cero.
0
ds
d
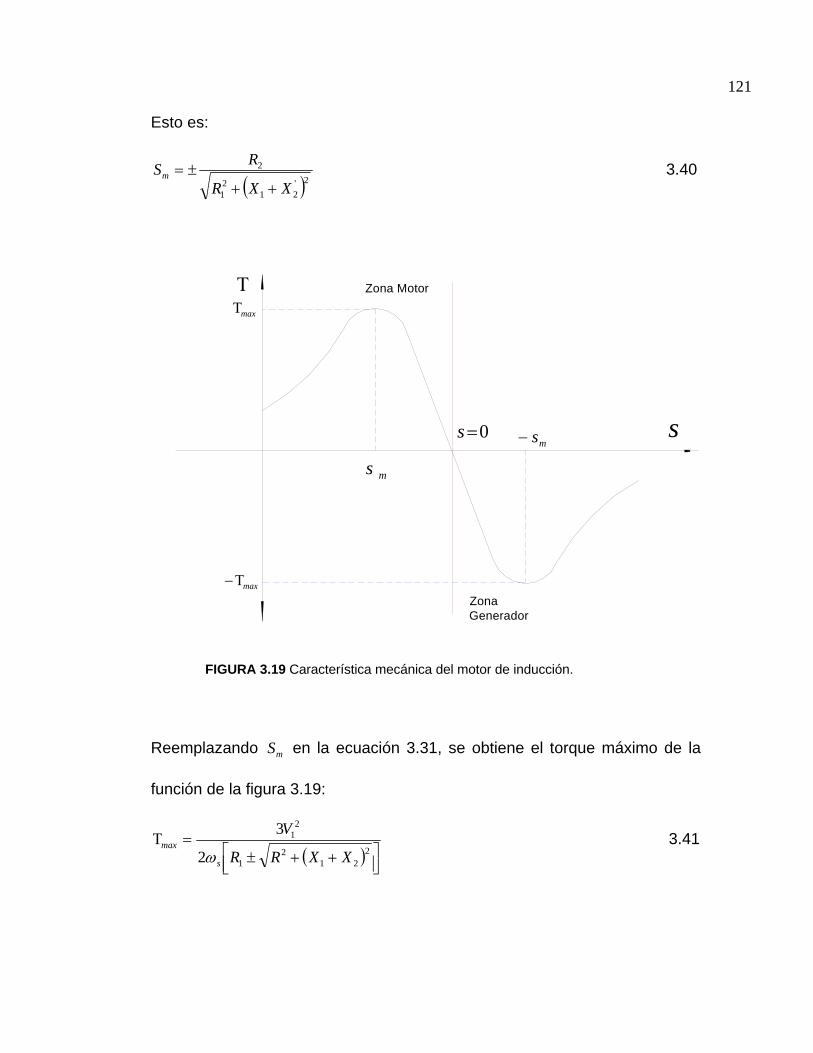
121
Esto es:
2'21
21
2
XXR
RSm
3.40
Reemplazando mS en la ecuación 3.31, se obtiene el torque máximo de la
función de la figura 3.19:
2
212
1
21
2
3
XXRR
V
s
max
3.41
Zona Generador
Zona Motormax
max
0s
ms
ms s
FIGURA 3.19 Característica mecánica del motor de inducción.
122
El signo positivo hace referencia la torque máximo que se presenta en la
zona motor y el signo negativo se refiere al torque máximo que se presenta
en la zona generador.
Otro punto importante para resaltar es la dependencia directa que tiene el
deslizamiento con la resistencia del rotor. Este parámetro se convierte en
punto fundamental para la evaluación del arranque de la maquina como
también de su rendimiento, ya que si este es alto, la maquina tendrá un gran
torque pero se incrementan sus perdidas.
Cuando 1S el torque de arranque:
2'21
2'21
21
XXRR
RV
s
arr
3.42
Esta ecuación permite determinar el valor de resistencia que debe tener el
motor, para lograr el valor de torque en el arranque necesario para mover
una determinada carga.
La variación de resistencias permite obtener las diferentes características
mostradas en la figura 3.20:

123
3.7 ACERCAMIENTO DEL COMPORTAMIENTO DEL MOTOR DE
INDUCCION DESPRECIANDO LA IMPEDANCIA DE ESTATOR
Al observar el circuito equivalente del motor de inducción de la figura 3.15 se
pueden realizar las siguientes aproximaciones:
4R 3R 2R 1R
4321 RRRR
0ss
FIGURA 3.20 Variación de la característica mecánica del motor por medio de la variación de la resistencia del rotor.
RE
2X
sR 2
2I
FIGURA 3.21 Circuito equivalente del rotor, alimentado desde una fuente
imaginaria con tensión de alimentación RE .

124
Se considera la tensión inducida RE como una fuente de tensión aplicada
directamente al rotor.
Se desprecia la impedancia del estator y la reactancia de magnetización
quedando solo el circuito equivalente del rotor. (Figura 3.21)
22
2
2
2
Xs
R
EI R
3.42
Reemplazando la 2i en la ecuación 3.38, la expresión del torque queda:
22
2
2
223
Xs
Rs
ER
s
R
3.43
El flujo magnético que recorre el hierro del motor es:
ttm sen2sen 3.44
La tensión RE es igual a:
tEER cos2 2
tdt
dE mR cos
Al igualar las ecuaciones anteriores, se halla el valor de 2E :
ttE m coscos2 2
2
2 12
mfE
3.45
Con el resultado obtenido de la tensión 2E , el valor del torque resultante es:

125
22
2
2
2123
XS
RS
fR m 3.46
De igual forma que en el análisis inicial lo que se busca es el valor de torque
máximo, el cual ocurre cuando el deslizamiento es máximo.
Derivando respecto a S e igualando a cero la ecuación 3.46, se obtiene:
2
2
X
RSm 3.47
Reemplazado este resultado en la ecuación 3.46, el valor del par máximo
será:
2
21
2
3
X
f mm
3.48
Se ha obtenido entonces, la expresión que relaciona el torque máximo con el
flujo magnético.
La potencia eléctrica que ingresa al rotor será:
22 cos3 IEP Re 3.49
Al despreciar los parámetros del estator, la potencia eléctrica aplicada al rotor
es igual a la potencia que atraviesa el entrehierro, esto es: ge PP .
Teniendo en cuenta lo anterior se obtiene la siguiente expresión:
126
22 cos2
3 Ims 3.50
Con lo anterior, se ha obtenido el torque en función del flujo y la corriente del
rotor.
A valores mínimos de deslizamiento, la componente resistiva del rotor es
mayor que la componente reactiva. Por tanto en este caso se considera al
motor como una carga de tipo resistiva en la que el factor de potencia del
circuito del rotor es cercano a la unidad.
22 X
s
R y 1cos 2
22
3Im 3.51
Bajo la condición anterior de pequeños deslizamientos, la corriente es:
2
12
2
2
R
SfI m
3.52
La expresión final del torque ejercido por el motor es:
2
22
2
21 33
R
f
R
Sf mm
3.53
Se observa en la ecuación final 3.53 del torque, que depende del cuadrado
del flujo y al mantenerlo constante, la relación de torque contra frecuencia
también se conserva.
127
Del análisis hecho a la ecuación 3.45 se concluye que el flujo magnético es
proporcional a la relación 1f
ER . Despreciando la influencia de la impedancia
del estator, el flujo magnético se aproxima a 1
1
f
V .( Ver figura 3.17)
Al trabajar por debajo de la velocidad o frecuencia nominal mientras se
mantiene el flujo constante, no se excede la magnitud de las corrientes
parásitas del motor, haciendo que las perdidas del hierro de la maquina no
se incrementen.
Manteniendo el flujo magnético constante en la zona de la característica
mecánica del motor donde el deslizamiento S es mínimo, el torque presenta
una relación aproximadamente proporcional con la frecuencia de
deslizamiento.
12 Sff
3.8 REGIMENES DE FUNCIONAMIENTO DEL MOTOR DE INDUCCION
Con el fin de realizar un análisis de las zonas de funcionamiento del motor de
inducción se ha calculado la impedancia equivalente vista desde la rama de
magnetización del estator hacia el rotor, señalada entre los puntos a y b del
circuito de la figura 3.22.
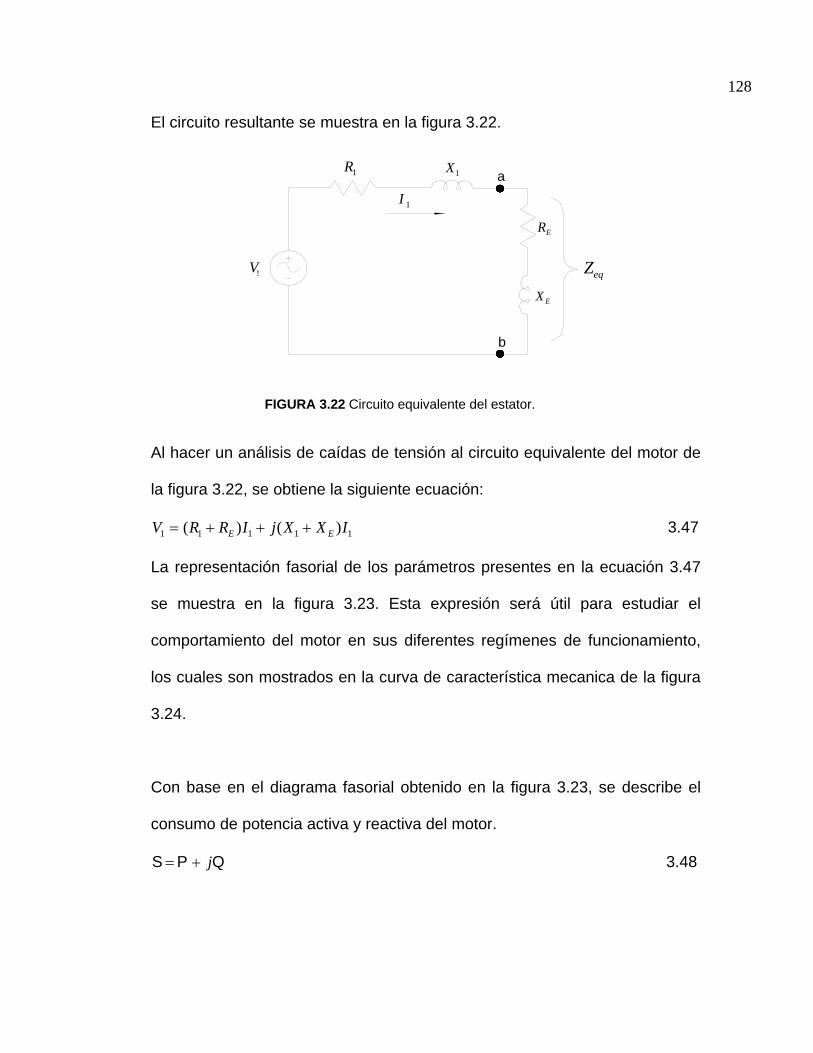
128
El circuito resultante se muestra en la figura 3.22.
Al hacer un análisis de caídas de tensión al circuito equivalente del motor de
la figura 3.22, se obtiene la siguiente ecuación:
11111 )()( IXXjIRRV EE 3.47
La representación fasorial de los parámetros presentes en la ecuación 3.47
se muestra en la figura 3.23. Esta expresión será útil para estudiar el
comportamiento del motor en sus diferentes regímenes de funcionamiento,
los cuales son mostrados en la curva de característica mecanica de la figura
3.24.
Con base en el diagrama fasorial obtenido en la figura 3.23, se describe el
consumo de potencia activa y reactiva del motor.
QPS j 3.48
!V
1I
ER
EX
eqZ
1R 1Xa
b
FIGURA 3.22 Circuito equivalente del estator.

129
1V
11 )( IXX E
1
1I11 )( IRR E
FIGURA 3.23 Diagrama fasorial del circuito equivalente del motor, visto desde el estator.
s0s
0s10 s1s
Velocidad subsincronica Velocidad hipersincronica
Zona de motorZona de freno
Zona de generador
FIGURA 3.24 Zonas de funcionamiento del motor de inducción.
130
En este caso las potencias activa y reactiva (P y Q), son iguales a:
111 cos3 IVP
111 sen3 IVQ
El ángulo 1 esta definido como:
E
E
RR
XXarctan
1
11
De acuerdo a las posiciones de los fasores de la figura 3.23, es posible
asegurar que en esta zona de trabajo, las potencias reactiva y activa están
siendo absorbidas por el motor. Este hecho es consecuencia del
comportamiento inductivo de la maquina, el cual se puede verificar al tener
en cuenta que la magnitud del ángulo entre los fasores esta entre 0 y
2
radianes.
Un motor normalmente trabaja en esta zona con una carga acoplada a su
eje. El comportamiento de la maquina aquí, es de tipo inductivo y su
velocidad esta por debajo de la máxima a deslizamiento cercano a cero. A
esta velocidad se le denomina velocidad subsincrónica o por debajo de la
velocidad sincrónica. El valor de la velocidad relativa entre la velocidad
mecánica del rotor y la velocidad sincrónica del campo magnético, esta
comprendida entre 0 y 1 con relación a la velocidad sincrónica.
131
3.8.1 Régimen de frenado recuperativo. En la segunda zona llamada de
generador, el motor recibe potencia reactiva Q desde la red de alimentación
y entrega potencia activa P . En esta zona el valor del ángulo 1 oscila entre
2
y radianes.
La velocidad que el motor adquiere en esta zona de funcionamiento
generador es superior a la velocidad sincrónica. Esta velocidad recibe el
nombre de velocidad hipersincrónica y debe ser impuesta por una fuente
externa de energía mecánica. La velocidad de deslizamiento se vuelve
negativa 0S .
En el diagrama fasorial de la figura 3.25 se pueden apreciar cambios como la
inversión del sentido de la corriente activa, la permanencia del sentido de la
potencia reactiva y el aumento del ángulo de fase de la corriente de estator y
la tensión de entrada en un valor mayor a 2
.
El signo del factor de potencia define el flujo que tiene la potencia activa.
Este modo de operación se utiliza en sistemas que permiten el frenado
dinámico.
La ecuación resultante de analizar el diagrama fasorial de la figura 3.25 se
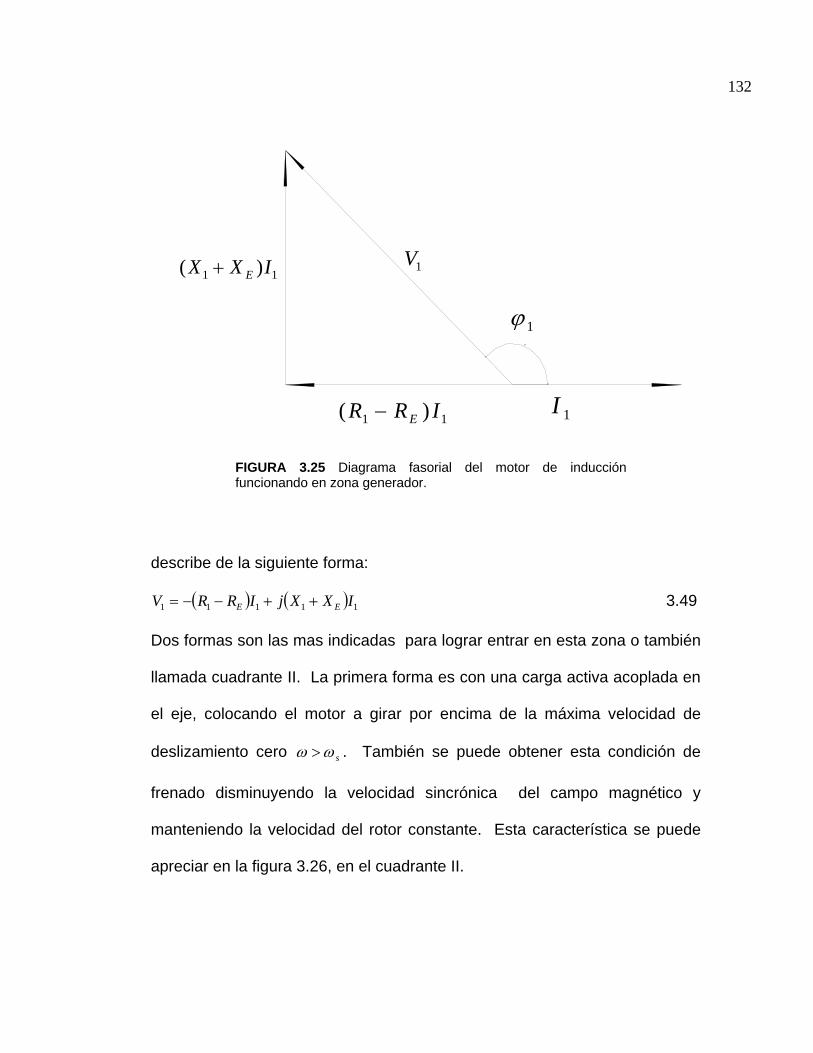
132
describe de la siguiente forma:
11111 IXXjIRRV EE 3.49
Dos formas son las mas indicadas para lograr entrar en esta zona o también
llamada cuadrante II. La primera forma es con una carga activa acoplada en
el eje, colocando el motor a girar por encima de la máxima velocidad de
deslizamiento cero s . También se puede obtener esta condición de
frenado disminuyendo la velocidad sincrónica del campo magnético y
manteniendo la velocidad del rotor constante. Esta característica se puede
apreciar en la figura 3.26, en el cuadrante II.
1V
1
1I11 )( IRR E
11 )( IXX E
FIGURA 3.25 Diagrama fasorial del motor de inducción funcionando en zona generador.

133
En esta zona de generador se puede apreciar que el torque máximo es
mayor al torque máximo correspondiente de la zona motor.
3.8.2 Régimen de frenado a contracorriente. Por ultimo se analiza la
llamada zona de freno, en esta zona el rotor gira en sentido contrario al giro
del campo magnético, el deslizamiento supera el valor unitario y la velocidad
del rotor se vuelve negativa 0S .
Las potencias activa P , reactiva Q y la potencia mecanica en el eje, son
consumidas por el motor representando al igual que en un motor D.C, un
C
CC s
c
1R 2R 3R 321 RRR
II
IIV
III
FIGURA 3.26 Cuadrantes de operación del motor de inducción.
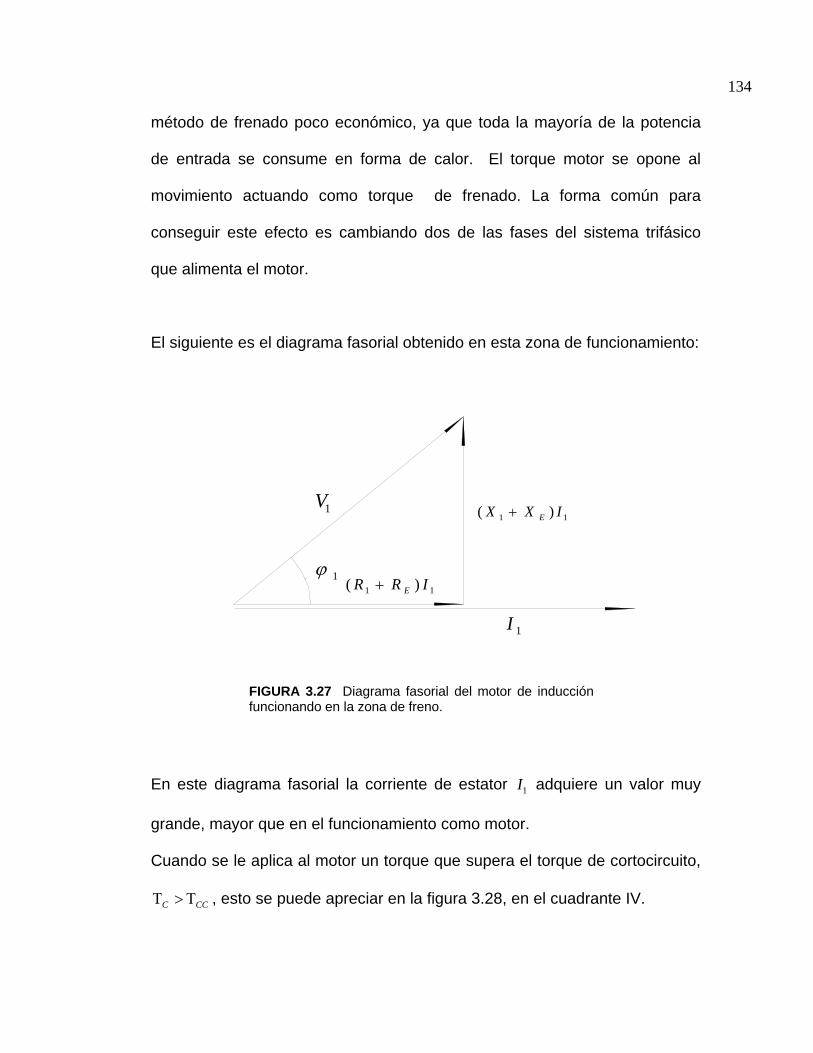
134
método de frenado poco económico, ya que toda la mayoría de la potencia
de entrada se consume en forma de calor. El torque motor se opone al
movimiento actuando como torque de frenado. La forma común para
conseguir este efecto es cambiando dos de las fases del sistema trifásico
que alimenta el motor.
El siguiente es el diagrama fasorial obtenido en esta zona de funcionamiento:
En este diagrama fasorial la corriente de estator 1I adquiere un valor muy
grande, mayor que en el funcionamiento como motor.
Cuando se le aplica al motor un torque que supera el torque de cortocircuito,
CCC , esto se puede apreciar en la figura 3.28, en el cuadrante IV.
1V11 )( IXX E
111 )( IRR E
1I
FIGURA 3.27 Diagrama fasorial del motor de inducción funcionando en la zona de freno.
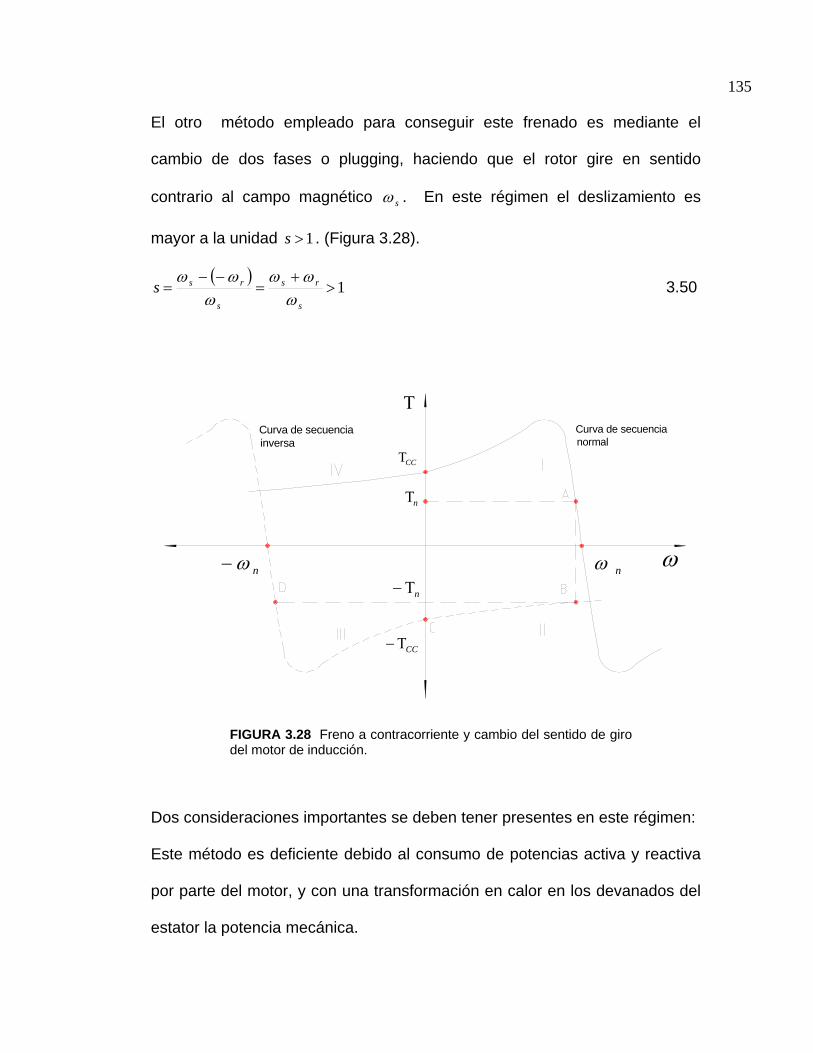
135
El otro método empleado para conseguir este frenado es mediante el
cambio de dos fases o plugging, haciendo que el rotor gire en sentido
contrario al campo magnético s . En este régimen el deslizamiento es
mayor a la unidad 1s . (Figura 3.28).
1
s
rs
s
rss
3.50
Dos consideraciones importantes se deben tener presentes en este régimen:
Este método es deficiente debido al consumo de potencias activa y reactiva
por parte del motor, y con una transformación en calor en los devanados del
estator la potencia mecánica.
CC
n
n
n n
CC
Curva de secuencianormal
Curva de secuencia inversa
FIGURA 3.28 Freno a contracorriente y cambio del sentido de giro del motor de inducción.
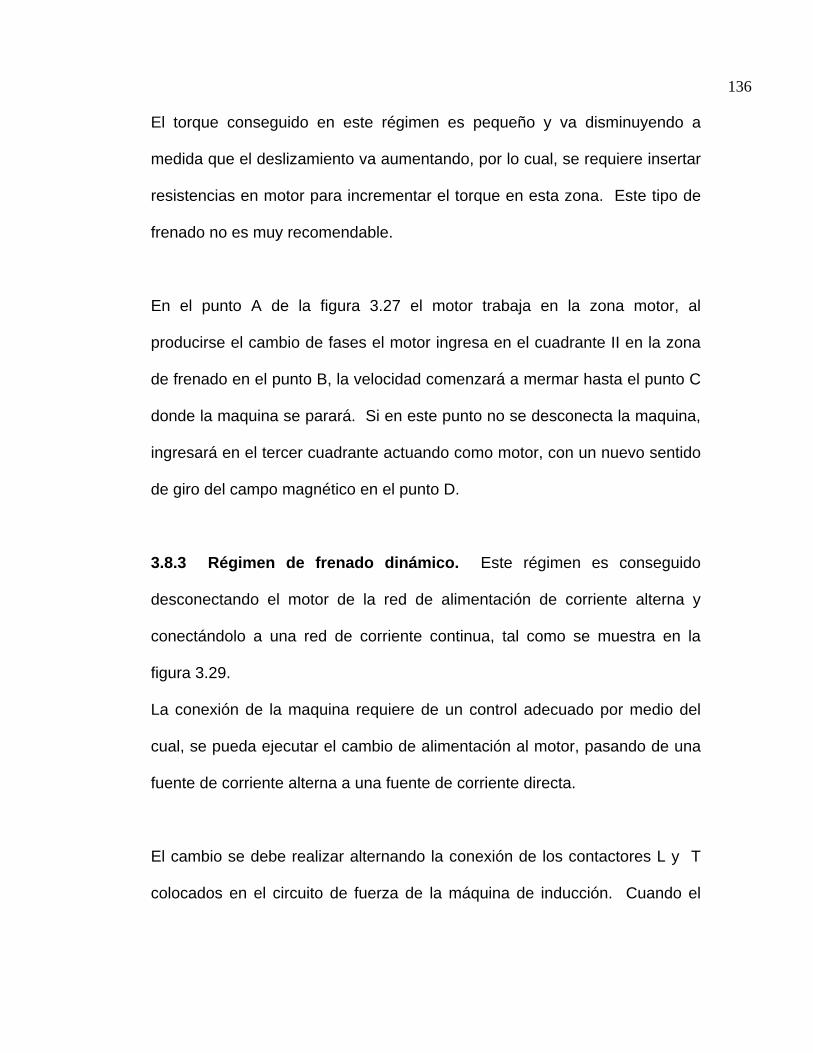
136
El torque conseguido en este régimen es pequeño y va disminuyendo a
medida que el deslizamiento va aumentando, por lo cual, se requiere insertar
resistencias en motor para incrementar el torque en esta zona. Este tipo de
frenado no es muy recomendable.
En el punto A de la figura 3.27 el motor trabaja en la zona motor, al
producirse el cambio de fases el motor ingresa en el cuadrante II en la zona
de frenado en el punto B, la velocidad comenzará a mermar hasta el punto C
donde la maquina se parará. Si en este punto no se desconecta la maquina,
ingresará en el tercer cuadrante actuando como motor, con un nuevo sentido
de giro del campo magnético en el punto D.
3.8.3 Régimen de frenado dinámico. Este régimen es conseguido
desconectando el motor de la red de alimentación de corriente alterna y
conectándolo a una red de corriente continua, tal como se muestra en la
figura 3.29.
La conexión de la maquina requiere de un control adecuado por medio del
cual, se pueda ejecutar el cambio de alimentación al motor, pasando de una
fuente de corriente alterna a una fuente de corriente directa.
El cambio se debe realizar alternando la conexión de los contactores L y T
colocados en el circuito de fuerza de la máquina de inducción. Cuando el
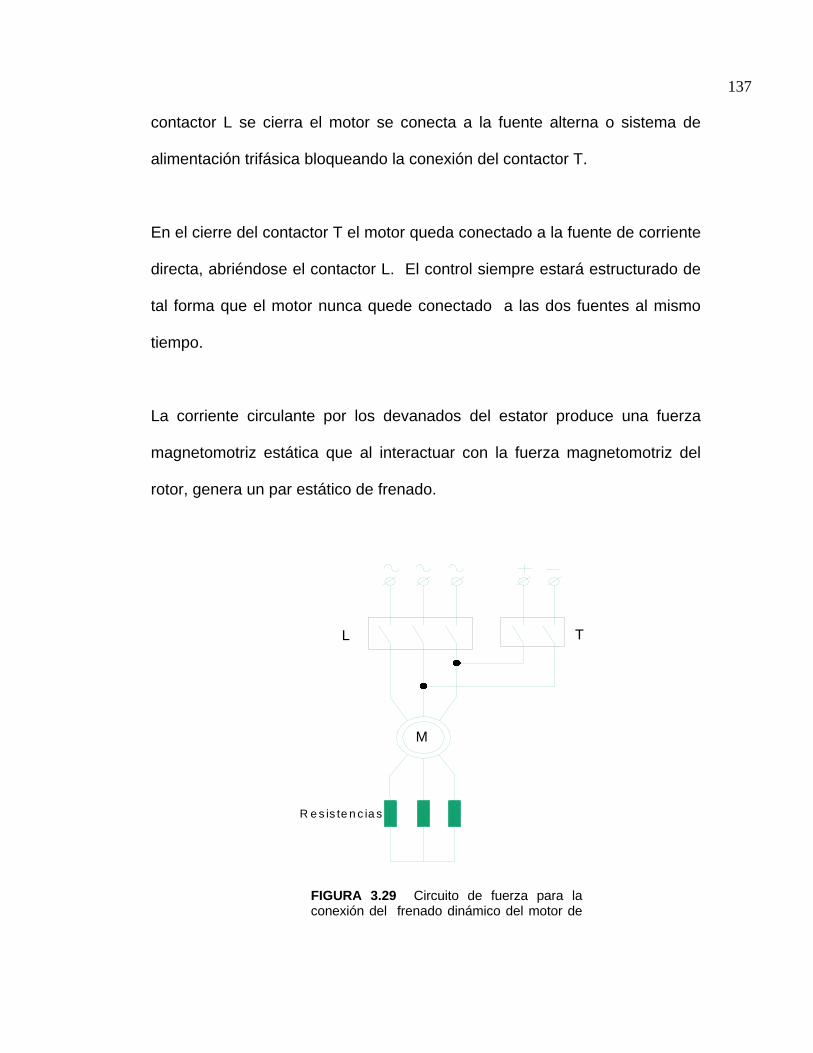
137
contactor L se cierra el motor se conecta a la fuente alterna o sistema de
alimentación trifásica bloqueando la conexión del contactor T.
En el cierre del contactor T el motor queda conectado a la fuente de corriente
directa, abriéndose el contactor L. El control siempre estará estructurado de
tal forma que el motor nunca quede conectado a las dos fuentes al mismo
tiempo.
La corriente circulante por los devanados del estator produce una fuerza
magnetomotriz estática que al interactuar con la fuerza magnetomotriz del
rotor, genera un par estático de frenado.
L T
R e s is te n c ia s
M
FIGURA 3.29 Circuito de fuerza para la conexión del frenado dinámico del motor de
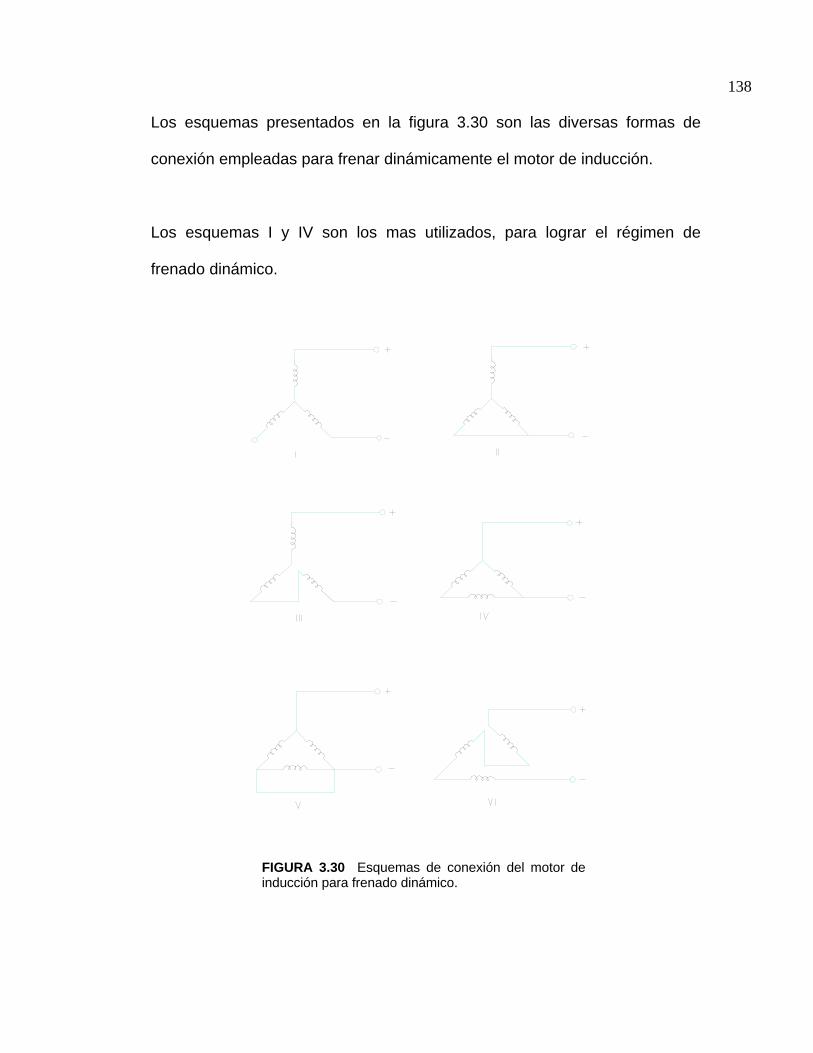
138
Los esquemas presentados en la figura 3.30 son las diversas formas de
conexión empleadas para frenar dinámicamente el motor de inducción.
Los esquemas I y IV son los mas utilizados, para lograr el régimen de
frenado dinámico.
FIGURA 3.30 Esquemas de conexión del motor de inducción para frenado dinámico.
CONTROL DE VELOCIDAD DE LOS MOTORES DE CORRIENTE
CONTINUA DE EXCITACION SEPARADA
4.1 INTRODUCCION
En la industria existen diversas maquinas y procesos que requieren para su
operación un control gradual con amplio rango de velocidad1 que permita
introducir variantes de aceleración y desaceleración en la carga.
La electrónica de potencia ha hecho posible la construcción de convertidores
que permiten el control por voltaje de los motores de corriente continua.
Estos se dividen en convertidores CA-CD ó rectificadores controlados y
convertidores CD-CD o pulsadores. La utilización de semiconductores
controlados o tiristores, Tales como el BJT, Mosfet, IGBT, etc. ha aumentado
la aceptación en el ámbito industrial de estos circuitos electrónicos.
1 Este amplio rango de velocidad tiene que ver con valores iniciales desde cero, hasta valores por encima de la nominal y también con velocidades en sentido contrario de rotación.
140
En este capítulo además de realizar un análisis del control con elementos
electrónicos, también se hace un análisis del control por flujo magnético y
control reostático de menos utilización en el mercado.
4.2 ZONAS DE TRABAJO DE POTENCIA CONSTANTE Y DE TORQUE
CONSTANTE
En el capitulo II se obtuvo la ecuación 2.18. La cual describe el
comportamiento de la velocidad respecto a la corriente y se le da el nombre
de característica de velocidad.
aaa i
k
R
k
V
Los parámetros sobre los cuales se debe actuar para ejercer un control de la
velocidad del motor, aparecen en esta ecuación. Ellos son ,, aa iV .
Al control en el que se varía el voltaje de armadura aV , se le llama control de
voltaje y es el más usado por controladores electrónicos de velocidad .
Cambiando el valor de la corriente de campo fi que produce el flujo
magnético de excitación de la maquina f
f
R
V se obtiene el control de
velocidad por variación del flujo o campo magnético.
141
Al modificar el valor de la corriente de armadura ai se controla la demanda
del torque motor aik manteniendo a su vez la corriente de campo fi fija
para conservar el flujo magnético constante. Este método de variación de
velocidad se adecua instalando un reostato en serie con la armadura. Este
tipo de control recibe el nombre de control reostático.
Cuando un motor está funcionando con valores nominales de voltaje de
armadura, corriente de armadura y corriente de campo, el motor esta girando
a velocidad base o velocidad nominal. Este valor permite establecer una
referencia para el control de la velocidad.
Para obtener velocidades por debajo de la velocidad base, se requiere de un
control de voltaje de armadura. En este método, a medida que se disminuye
el voltaje aV , disminuye proporcionalmente la velocidad.
Un valor de velocidad por encima de la velocidad base con este método
requiere un aumento de voltaje de armadura, por encima de su valor nominal.
Esto implica exponer a esfuerzos dieléctricos al aislamiento del devanado del
motor.
Para obtener velocidades por encima de la velocidad base, se varia la
corriente de campo del motor influyendo de manera directa en el flujo
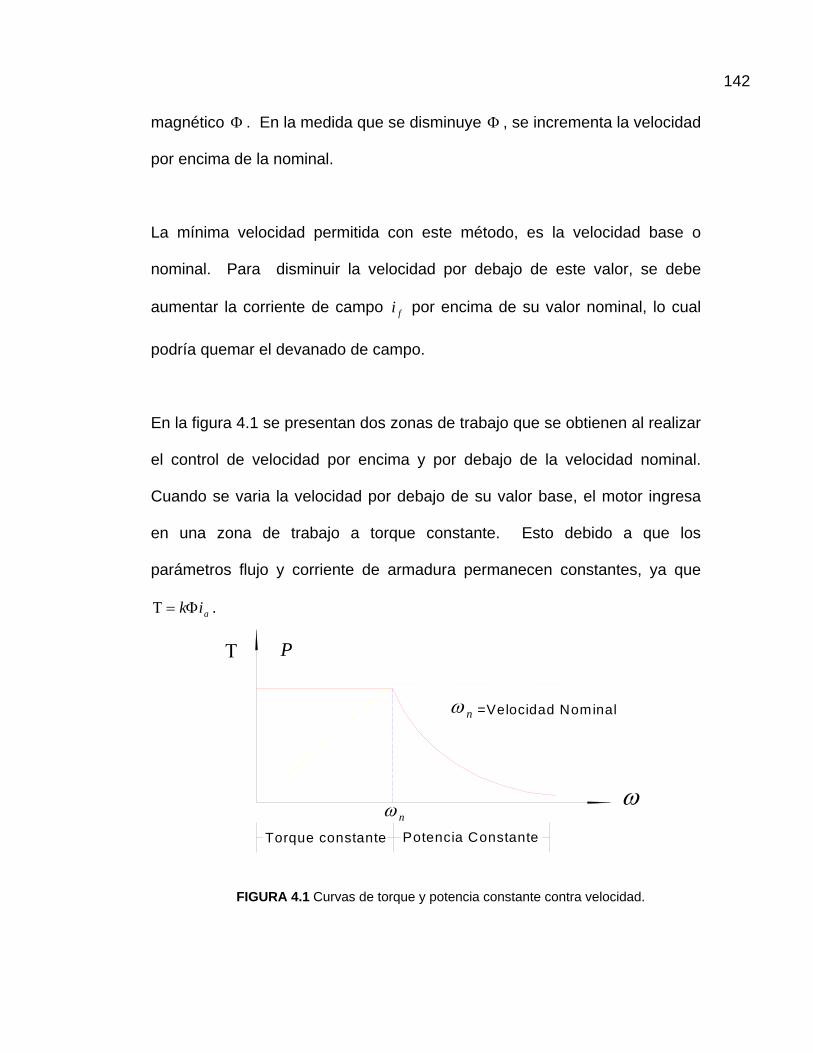
142
magnético . En la medida que se disminuye , se incrementa la velocidad
por encima de la nominal.
La mínima velocidad permitida con este método, es la velocidad base o
nominal. Para disminuir la velocidad por debajo de este valor, se debe
aumentar la corriente de campo fi por encima de su valor nominal, lo cual
podría quemar el devanado de campo.
En la figura 4.1 se presentan dos zonas de trabajo que se obtienen al realizar
el control de velocidad por encima y por debajo de la velocidad nominal.
Cuando se varia la velocidad por debajo de su valor base, el motor ingresa
en una zona de trabajo a torque constante. Esto debido a que los
parámetros flujo y corriente de armadura permanecen constantes, ya que
aik .
n
n
P
Torque constante Potencia Constante
=Velocidad Nominal
FIGURA 4.1 Curvas de torque y potencia constante contra velocidad.
143
En cambio la potencia tendrá una variación de lineal debido a su relación
directa con la velocidad P .
En el control de flujo magnético o control por campo, al variar la velocidad por
encima del valor nominal el motor ingresa en una zona de potencia
constante. La reducción del flujo magnético de campo conlleva a la
disminución del valor de torque, pero en la misma proporción de
decrecimiento del torque, se aumenta la velocidad, manteniendo constante el
valor de la potencia.
En las próximas secciones de este capitulo, se analiza en que momento la
maquina opera en estas zonas, ya sea funcionando como motor o como
freno.
4.3 CONTROL DEL VOLTAJE POR MEDIO DE CONVERTIDORES CA-CD
Para ejecutar este método de control se requiere obtener una fuente cuyo
valor de voltaje de salida pueda ser variado en un amplio rango de operación.
Es necesario convertir la corriente alterna abastecida por la red de
distribución, en una señal de corriente continua. Para cumplir con este
propósito, se dispone de circuitos convertidores estáticos, los cuales están
compuestos por tiristores, transistores etc.
144
En la industria se emplean los convertidores trifásicos CA-CD o rectificadores
controlados que pueden manejar valores de potencia del orden de los
megavatts.
Estos convertidores se encuentran comúnmente en configuraciones de
media onda y de onda completa o puente. Se componen principalmente de
tiristores, los cuales permiten variar la forma de la señal de tensión de
entrada a la carga. Estos tiristores se operan aumentando o disminuyendo el
ángulo de disparo que representa el tiempo de no-conducción del tiristor.
En la figura 4.2 se aprecia un convertidor trifásico de media onda y su
circuito equivalente.
cba VVV ,, Son los voltajes alternos entregados por el devanado secundario de
un transformador.
TR y TX Son la resistencia y la reactancia de dispersión equivalente del
transformador.
0V e 0i Son el voltaje y corriente aplicado a la carga.
fV e fi Son el voltaje y la corriente del devanado de campo.
p es la inductancia de alisamiento.
El sistema trifásico que alimenta este convertidor se describe en la figura 4.3
así como también, el correspondiente voltaje de salida, corriente de carga y
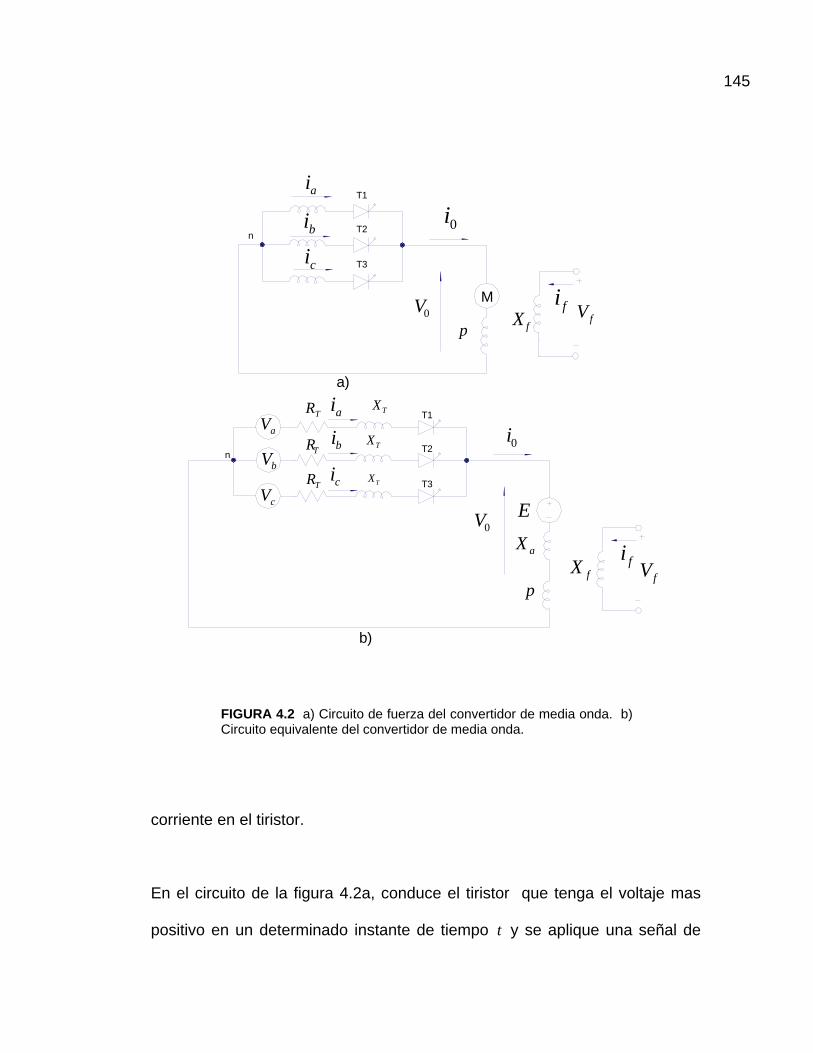
145
corriente en el tiristor.
En el circuito de la figura 4.2a, conduce el tiristor que tenga el voltaje mas
positivo en un determinado instante de tiempo t y se aplique una señal de
fifX
0i
fX fi
0V
T1
T2
T3
n
b)
p
ai
bi
ci
M
n
T3
T2
T1
aV
bV
cV
a)
TX
TX
TXai
biTR
TR
ciTR
0V E
p
aX
0i
fV
fV
FIGURA 4.2 a) Circuito de fuerza del convertidor de media onda. b) Circuito equivalente del convertidor de media onda.
146
disparo a su compuerta. El tiempo total de conducción de cada tiristor esta
determinado por el ángulo de no-conducción .
El voltaje en la figura 4.3b alcanza valores negativos debido a la
característica inductiva de la carga, que hace que el tiristor conduzca mas
allá de su periodo normal. El segundo tiristor empieza su conducción
cuando es excitado en su compuerta, inhabilitando automáticamente la
conducción del tiristor T1. La corriente de carga se mantiene un solo sentido,
sin afectarse por la variación del voltaje excepto en un periodo de tiempo
denominado, tiempo de conmutación.
El voltaje promedio ideal dV que entrega el convertidor de media onda se
puede determinar, tomando como ejemplo la señal de salida del periodo de
conducción de uno de los tiristores. En la figura 4.4 se define el eje y los
limites que determinan el periodo de conducción de uno de los tiristores.
La ecuación para el voltaje promedio ideal de salida en un tiempo de
conducción desde
P hasta
P
, se plantea de la siguiente manera:
p
dp
md ttdV
P
V cos21
4.1

147
aV bVcV
t
V
66 t
0V
0i
t
1Ti
6
65 t
FIGURA 4.3 a) Sistema de voltajes trifásico. b) Voltaje de salida del convertidor de media onda. c) Corriente de salida del convertidor. d) Corriente de tiristor T1.
a)
b)
c)
d)

148
cossenP
PVV m
d 4.2
P es el numero de fases de conducción o numero de tiristores que
componen el convertidor. Para la configuración de media onda 3P .
El voltaje efectivo de cada fase es:
2m
Ef
VV
Reemplazando la expresión anterior del voltaje efectivo, en la ecuación de
voltaje promedio 4.2 se obtiene:
cos3
sen23
Efd VV
cos17.1 Efd VV 4.3
P2
aV
dV
bV
t
P
P
tVV ma cos
mV
FIGURA 4.4 Voltaje promedio ideal que entrega el convertidor.
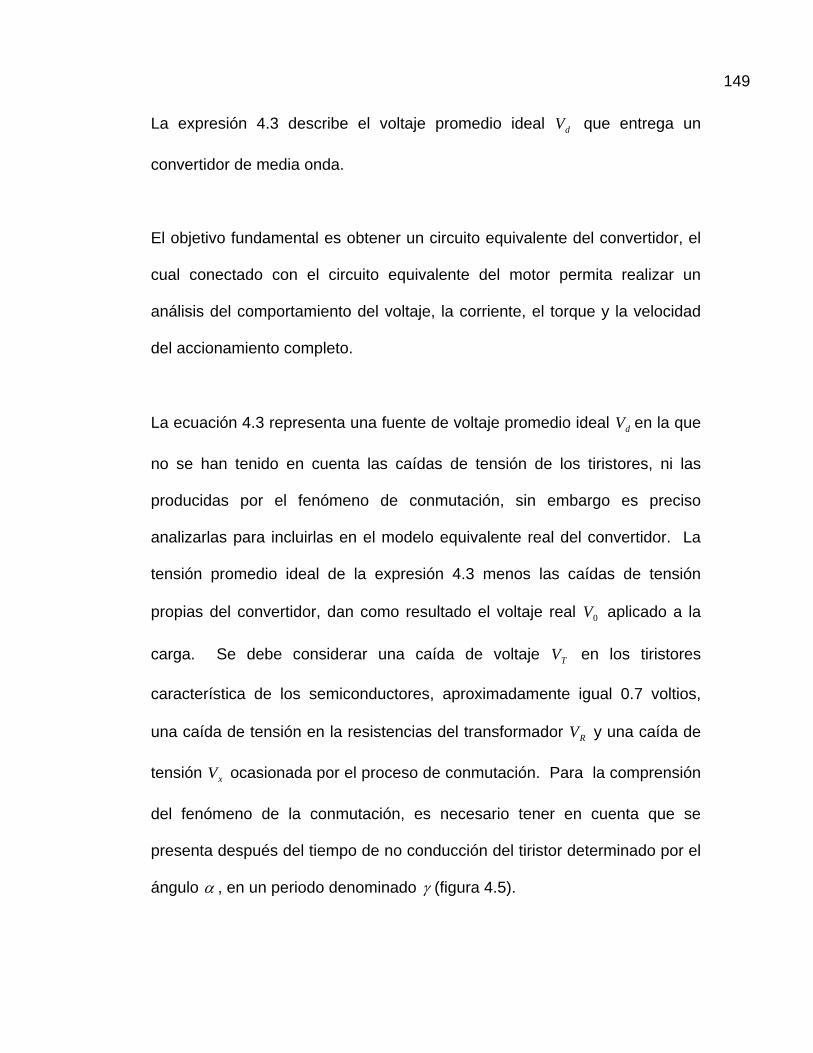
149
La expresión 4.3 describe el voltaje promedio ideal dV que entrega un
convertidor de media onda.
El objetivo fundamental es obtener un circuito equivalente del convertidor, el
cual conectado con el circuito equivalente del motor permita realizar un
análisis del comportamiento del voltaje, la corriente, el torque y la velocidad
del accionamiento completo.
La ecuación 4.3 representa una fuente de voltaje promedio ideal dV en la que
no se han tenido en cuenta las caídas de tensión de los tiristores, ni las
producidas por el fenómeno de conmutación, sin embargo es preciso
analizarlas para incluirlas en el modelo equivalente real del convertidor. La
tensión promedio ideal de la expresión 4.3 menos las caídas de tensión
propias del convertidor, dan como resultado el voltaje real 0V aplicado a la
carga. Se debe considerar una caída de voltaje TV en los tiristores
característica de los semiconductores, aproximadamente igual 0.7 voltios,
una caída de tensión en la resistencias del transformador RV y una caída de
tensión xV ocasionada por el proceso de conmutación. Para la comprensión
del fenómeno de la conmutación, es necesario tener en cuenta que se
presenta después del tiempo de no conducción del tiristor determinado por el
ángulo , en un periodo denominado (figura 4.5).
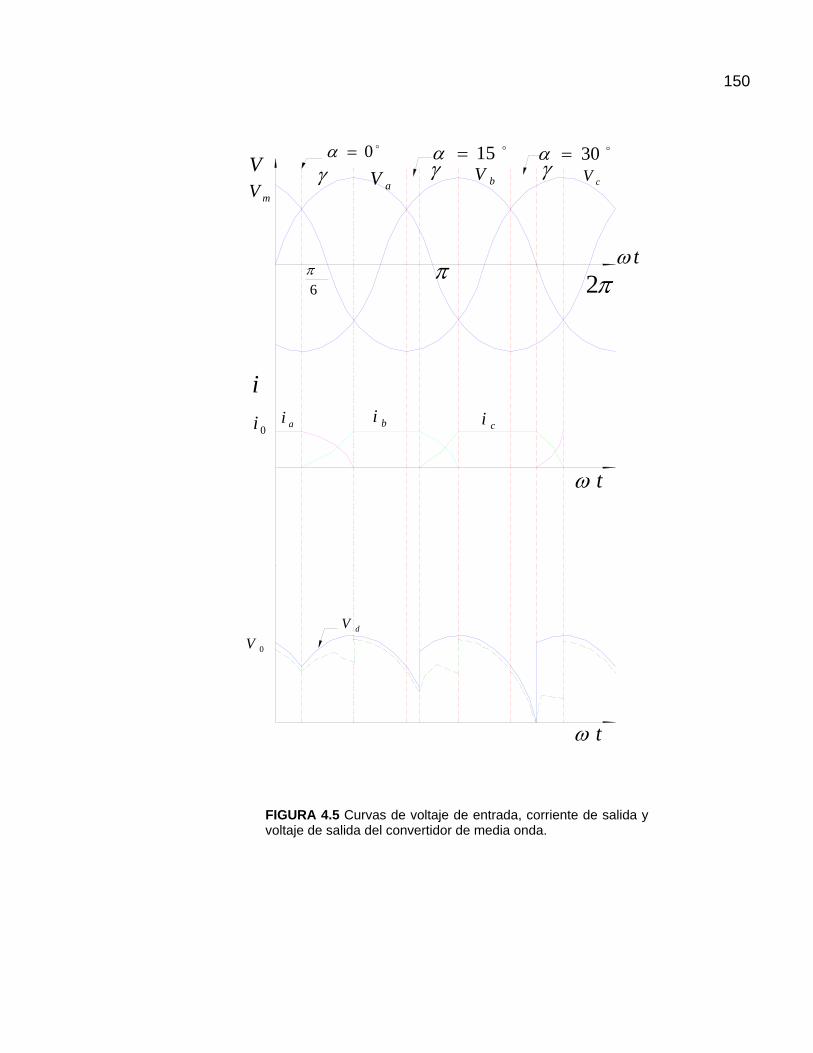
150
15 30
bVVcV
mV
t6
i
0i
t
ai bici
t
0VdV
0
aV
2
FIGURA 4.5 Curvas de voltaje de entrada, corriente de salida y voltaje de salida del convertidor de media onda.
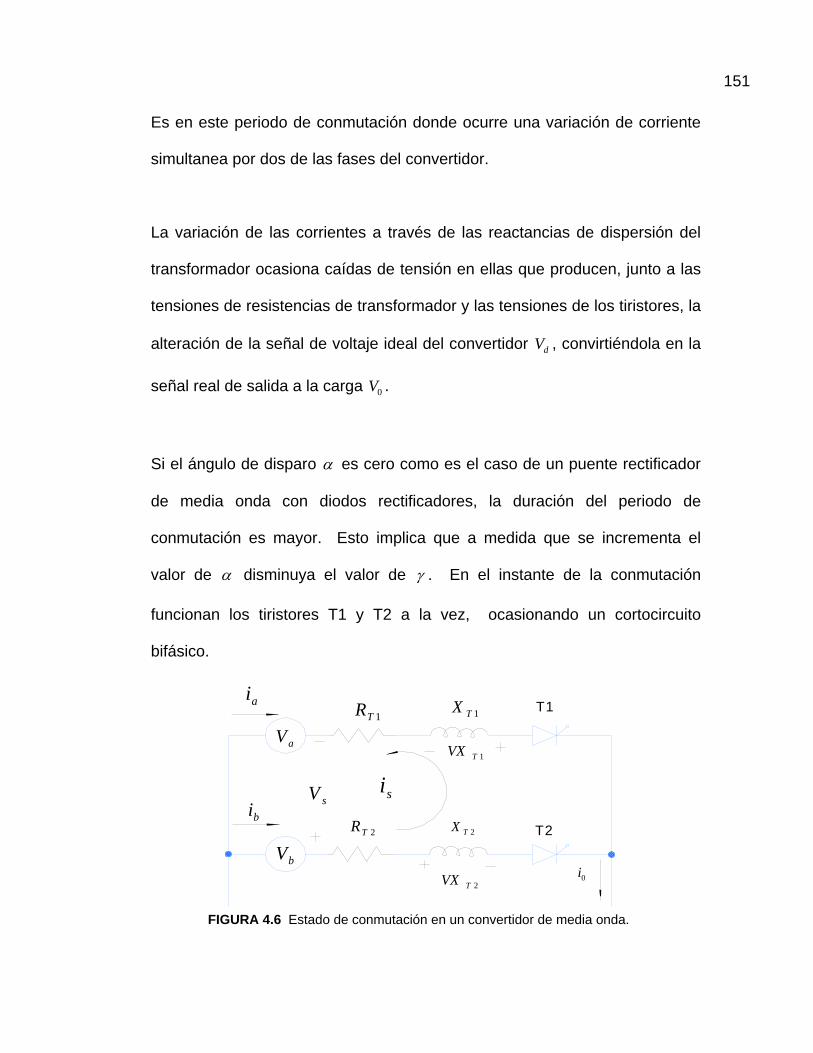
151
Es en este periodo de conmutación donde ocurre una variación de corriente
simultanea por dos de las fases del convertidor.
La variación de las corrientes a través de las reactancias de dispersión del
transformador ocasiona caídas de tensión en ellas que producen, junto a las
tensiones de resistencias de transformador y las tensiones de los tiristores, la
alteración de la señal de voltaje ideal del convertidor dV , convirtiéndola en la
señal real de salida a la carga 0V .
Si el ángulo de disparo es cero como es el caso de un puente rectificador
de media onda con diodos rectificadores, la duración del periodo de
conmutación es mayor. Esto implica que a medida que se incrementa el
valor de disminuya el valor de . En el instante de la conmutación
funcionan los tiristores T1 y T2 a la vez, ocasionando un cortocircuito
bifásico.
si
aV
ai
bV
bi
T1
T2
sV
0i
1TX
2TX
1TR
2TR
1TVX
2TVX
FIGURA 4.6 Estado de conmutación en un convertidor de media onda.

152
Cuando comienza la conmutación las corrientes ai e bi que circulan por los
ramales tienen un efecto contrario, la primera empieza a reducirse y la
segunda a aumentar su magnitud. Debido a este cambio de corrientes se
crean unos voltajes en las inductancias 1TVx y 2TVx , que influyen en la
magnitud del voltaje de salida del convertidor.
Aplicando ley de voltajes al circuito de la figura 4.6 se obtiene:
dt
diXiR
dt
diXiRVVV s
TsTs
TsTabs 1122 4.4
Donde sV es el voltaje de línea que impulsa la corriente si . Este voltaje es
igual a la diferencia de tensiones entre las fuentes aV y bV .
Si las resistencias del transformador se desprecian y se consideran las
reactancias TTT XXX 21 :
dt
diXV s
Ts 2 4.5
El valor de la corriente de conmutación si , se obtiene despejando e
integrando la ecuación 4.5.
Como el voltaje de línea es igual a sV :
)sen(3 tVV ms

153
Obsérvese que la expresión anterior tiene un ángulo de adelanto igual a
grados, esto indica que la señal sV se presenta cuando se inicia la
conducción de otro tiristor, es decir cuando empieza el periodo de
conmutación y se extiende hasta su finalización.
tdtensX
Vdi
T
mS )(
2
3
AtX
Vi
T
ms )cos(
2
3 4.6
En la conmutación se tiene que las corrientes en los ramales son iguales a:
sa ii
i 20 4.7
sb ii
i 20 4.8
Reemplazando en las ecuaciones 4.7 y 4.8 el valor de si , se obtiene:
AtX
Vii
T
ma cos
2
3
20 4.9
AtX
Vii
T
mb cos
2
3
20 4.10
En el instante que se inicia la conmutación 0bi y 0t . El valor de la
constante A se puede despejar:
2cos
2
3 0i
X
VA
T
m

154
Las funciones de las corrientes ai e bi en el dominio del tiempo están
determinadas por:
)cos(cos2
3 t
X
Vi
T
ma
)cos(cos2
3 t
X
Vi
T
mb
El valor de la corriente 0i es constante durante el periodo de conmutación y
esta determinada por:
cos3
0T
m
X
Vi
Al transcurrir el estado de conmutación la corriente 0iib en el instante que
t . Por lo tanto:
coscos2
30
T
m
X
Vi 4.11
En el instante que se inicia la conmutación, 0 t .
Se debe hallar el valor de tensión promedio o D.C, durante el periodo de
conducción provocado por la caída de tensión en las reactancias durante el
periodo de conmutación.
0
sen2
321
tdtV
P
V mX
coscos4
33mX VV 4.12

155
De la ecuación 4.11 se despeja la expresión que representa la caída de
tensión en las dos reactancias:
tViX mT coscos32 0
Al reemplazar la expresión anterior en la ecuación 4.12 se obtiene:
0
3iXV TX
0478.0 iXV TX 4.13
La expresión XV tiene gran importancia debido a que representa una caída
de tensión D.C equivalente al 47.8% de la tensión ideal dV .
La tensión 0V que entrega el convertidor a la carga será:
XRTm VVVVV cos0 4.14
Reemplazando la expresión 4.13 en la ecuación 4.14:
00 478.0cos iXRVVV TTTm 4.15
El valor de la impedancia del transformador vista desde el convertidor se
puede agrupar en un solo termino:
TTc XRR 478.0
Reemplazando él termino de la impedancia cR en la ecuación 4.15, la
expresión 0V queda:
00 cos iRVVV cTm 4.16

156
El esquema para la configuración en puente, será el mostrado en la figura
4.7. En esta configuración los tiristores trabajan por parejas en el siguiente
orden T1-T2, T2-T3, T3-T4, T4-T5, T5-T6, T6-T1, los tiristores se disparan en
cada intervalo de3
.
Conduce la pareja de tiristores sometida al voltaje mas positivo y al voltaje
más negativo en un instante de tiempo determinado, apareciendo en la carga
valores de voltaje de línea. En la figura 4.7b aparece el circuito equivalente
del convertidor en puente.
Para el puente trifásico con un total de seis tiristores, el voltaje promedio
ideal de salida será:
cos6
sen26
md VV
cos34.2 md VV 4.17
Las caídas de voltaje serán:
TT VV 2'
02' iRV TR
00 955.06
iXiXV TTX
4.18
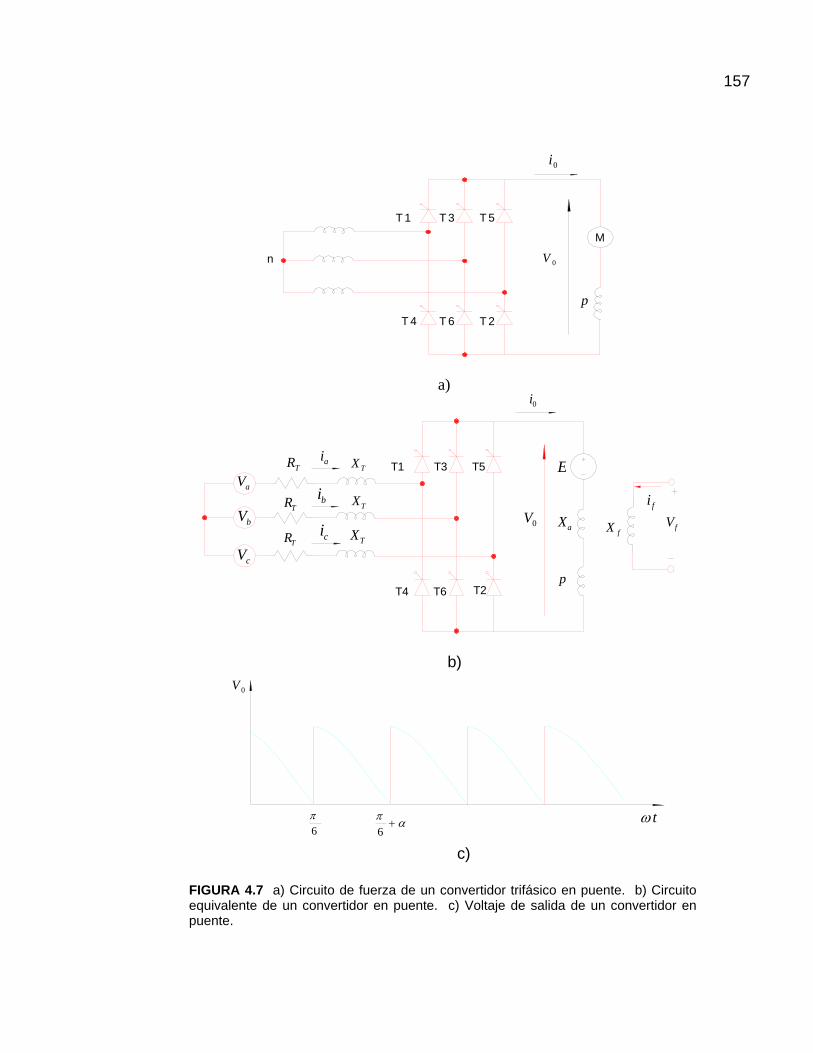
157
T 1 T 3 T 5
0V
0i
n
p
M
T 4 T 6 T 2
aV
bV
cV
ai
bi
ci0V
fVfi
fX
T1 T3 T5
T4 T2T6
TR TX
TR TX
TR TX
E
aX
p
0i
0V
t6
6
a)
b)
c)
FIGURA 4.7 a) Circuito de fuerza de un convertidor trifásico en puente. b) Circuito equivalente de un convertidor en puente. c) Voltaje de salida de un convertidor en puente.

158
La ecuación de voltajes queda:
020 'cos iRVVV cTm 4.19
donde TTc XRR 955.022
Con el anterior resultado se concluye que con el convertidor de media onda y
con el convertidor de puente se pueden estructurar con un mismo circuito
incluye el circuito equivalente del motor (figura. 4.8).
De la figura 4.8 se puede concluir:
0cos iRRREVV apcTm 4.20
Donde las resistencias del circuito se pueden agrupar en una resistencia
equivalente ER .
apcE RRRR
cosmd VV kE
0i
0V
cR pR aRTVD aX
FIGURA 4.8 Circuito equivalente del convertidor de media y onda completa.

159
La ecuación característica de velocidad del accionamiento es:
k
iRVV ETm 0cos 4.21
Como aii 0 , la ecuación
k
i0 , puede ser reemplazada en la expresión
4.21.
2
cos
k
R
k
VV ETm 4.22
La gráfica descrita por ambas ecuaciones se muestra en la figura 4.9, donde
se puede apreciar que las características describen una familia de líneas
rectas que van variando a medida que se modifica el ángulo . Los puntos
que cortan el eje de las ordenadas indican los valores de la velocidad de
vacío.
0i
0
2
2 Zona de frenado recuperativo
Zona Motor
Zona de frenadoA contracorriente
Zona de frenadoDinamico
FIGURA 4.9 Características mecánicas de los convertidores de media y onda completa.
160
k
VV T
m cos0 4.23
La zona demarcada con línea punteada en la gráfica 4.9 se llama zona de
corriente discontinua ya que hay periodos de tiempo en los que esta se hace
nula. En esta zona se presenta una elevación de la velocidad debido a que
el voltaje promedio de salida del convertidor, es mayor al voltaje promedio
entregado en la zona de corriente continua, ya que el valor de la corriente de
vacío es mínimo y por tanto la energía almacenada en las inductancias
también lo es. Esta diferencia se puede apreciar en la figura 4.10.
La zona de corriente continua se presenta cuando hay una gran carga
conectada al motor que demanda una alta corriente, almacenando en las
inductancias del motor una gran energía magnética, que hace que los
tiristores conduzcan mas allá de su periodo normal de conducción.
La zona de corriente discontinua se presenta cuando la carga conectada al
motor es pequeña o esta en vació, exigiendo menor corriente que se traduce
en poca energía magnética almacenada, lo que ocasiona que cada tiristor
conduzca solo una pequeña fracción del periodo que le corresponde.
Para conseguir una variar la tensión de salida del convertidor es necesario
cambiar el ángulo de disparo de los tiristores. Con esto y algunas
161
variaciones de las condiciones de la carga, se puede lograr que el sistema
funcione en sus distintos regímenes de trabajo.
Cuando el valor del ángulo es menor que 2
y el torque motor tiende a
dominar la reacción impuesta por la carga, el sistema funciona en régimen
motor y el convertidor como un rectificador, tal como se muestra en el punto
1 de la gráfica 4.9.
Un valor de 2
representa una tensión ideal de salida 0dV y un
funcionamiento del sistema en régimen de frenado dinámico. Para este caso
se asume que el motor funciona con una carga activa que impone un torque
de reacción así la tensión de salida del convertidor haga que la velocidad del
sistema sea cero, tal como un ascensor.
El torque de carga hace que el sistema cambie el sentido de giro del motor y
por tanto la polaridad de la tensión autoinducida, manteniendo una
circulación de corriente en el sentido de conducción de los tiristores y
creando un torque de frenado. La energía creada por la carga se pierde al
disiparse en las resistencias de la maquina y el transformador. ( Ver punto 3
de la figura 4.9).
162
Si se mantiene constante un valor de menor a 2
y el torque de carga se
aumenta hasta detener y hacer girar al motor en el sentido contrario de su
velocidad, la tensión generada en el motor se suma a la suministrada por el
convertidor, haciendo circular un alto valor de corriente que hace que el
sistema funcione en régimen de frenado a contracorriente y la energía
suministrada por la carga mecánica, es también disipada en las resistencias
del sistema. En este tipo de sistema la energía mecánica y la energía
eléctrica se suman para contribuir a las perdidas. Hay que tener mucho
cuidado al realizar este tipo de frenado, debido a que la corriente que circula,
no debe exceder la permitida por los conductores de la maquina, ni la
corriente máxima permitida por los tiristores. Al igual que en el frenado
anterior se utiliza una carga activa que hace girar la maquina en el sentido
contrario al régimen motor. (Ver punto 4 de la figura 4.9).
Por último cuando el ángulo de disparo es mayor a 2
y se mantiene la
característica de la carga (ver punto 2 figura 4.9), la tensión promedio ideal
de salida dV del convertidor cambia de polaridad. La velocidad de vacío se
vuelve negativa y es menor que la velocidad impuesta por la carga.
En este régimen denominado de frenado recuperativo, el convertidor trabaja
como inversor al devolver energía a la red. La carga en este caso hace que
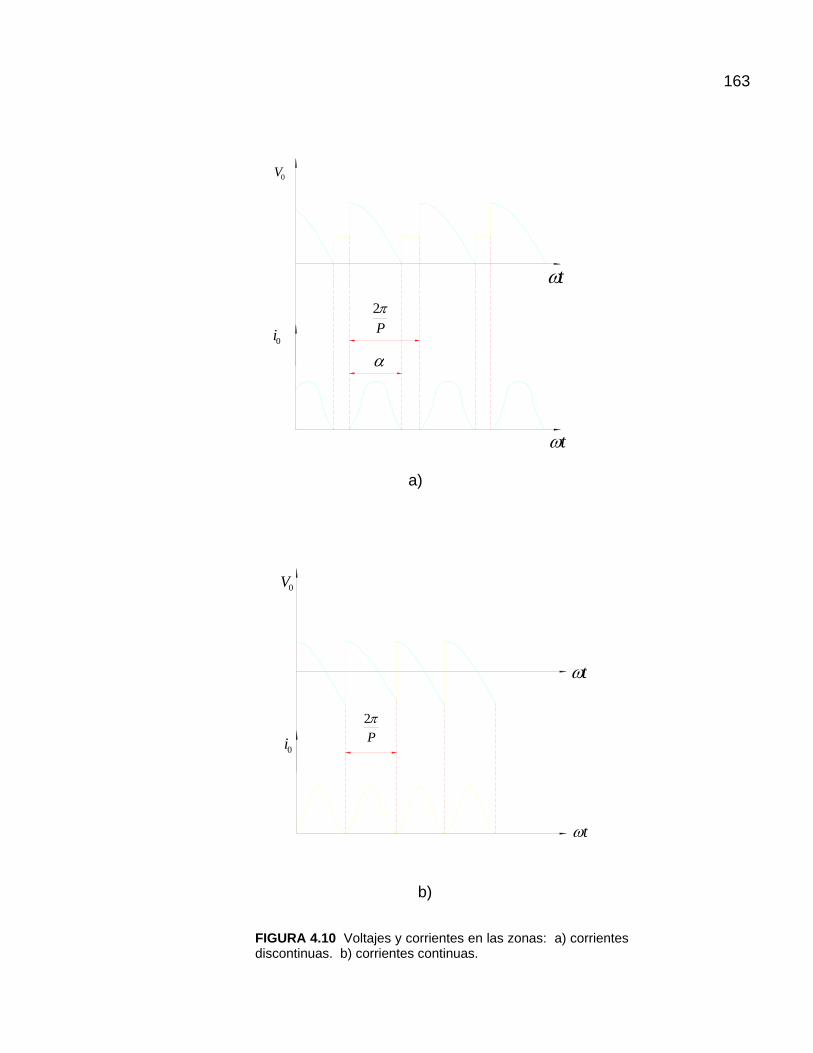
163
0i
P2
t
t
0V
t
0i
t
P2
0V
a)
b)
FIGURA 4.10 Voltajes y corrientes en las zonas: a) corrientes discontinuas. b) corrientes continuas.
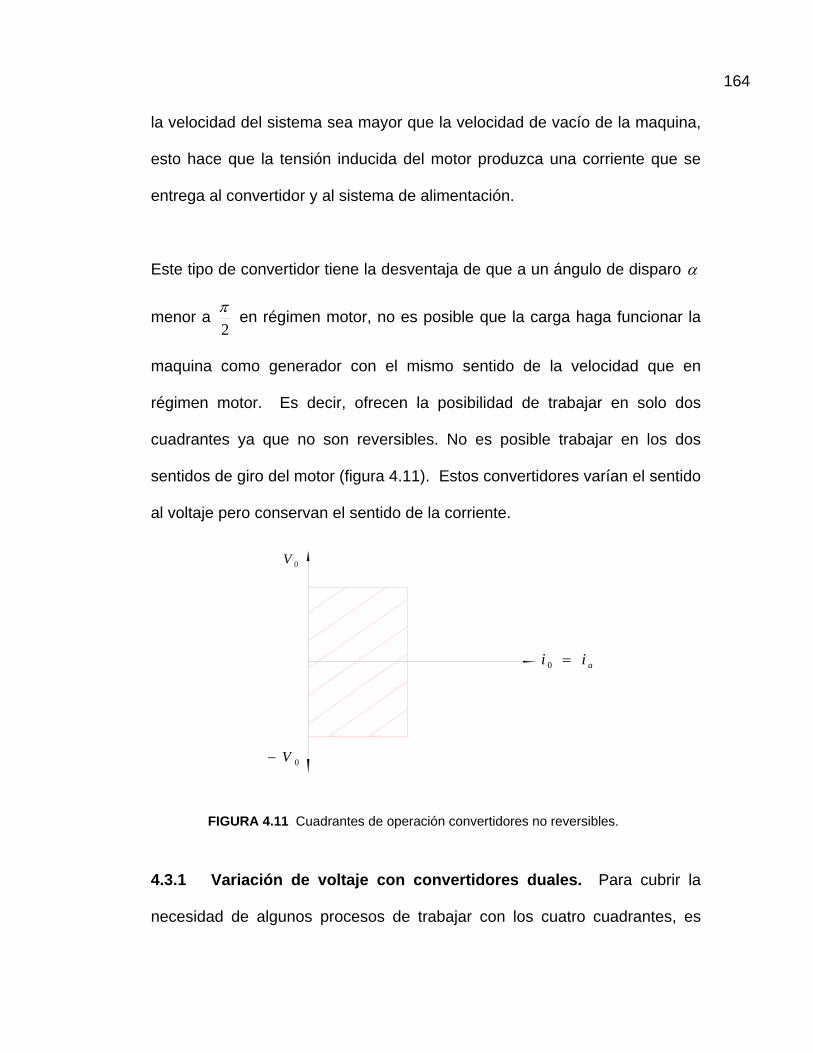
164
la velocidad del sistema sea mayor que la velocidad de vacío de la maquina,
esto hace que la tensión inducida del motor produzca una corriente que se
entrega al convertidor y al sistema de alimentación.
Este tipo de convertidor tiene la desventaja de que a un ángulo de disparo
menor a 2
en régimen motor, no es posible que la carga haga funcionar la
maquina como generador con el mismo sentido de la velocidad que en
régimen motor. Es decir, ofrecen la posibilidad de trabajar en solo dos
cuadrantes ya que no son reversibles. No es posible trabajar en los dos
sentidos de giro del motor (figura 4.11). Estos convertidores varían el sentido
al voltaje pero conservan el sentido de la corriente.
4.3.1 Variación de voltaje con convertidores duales. Para cubrir la
necesidad de algunos procesos de trabajar con los cuatro cuadrantes, es
0V
0V
aii 0
FIGURA 4.11 Cuadrantes de operación convertidores no reversibles.
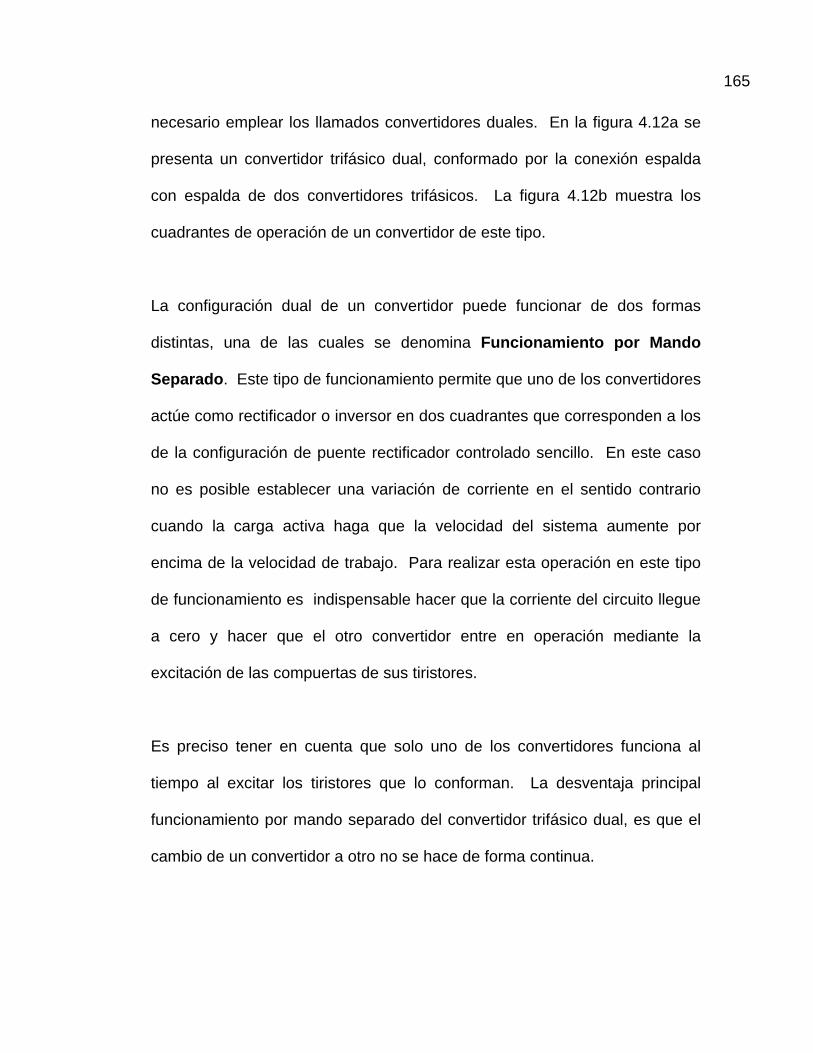
165
necesario emplear los llamados convertidores duales. En la figura 4.12a se
presenta un convertidor trifásico dual, conformado por la conexión espalda
con espalda de dos convertidores trifásicos. La figura 4.12b muestra los
cuadrantes de operación de un convertidor de este tipo.
La configuración dual de un convertidor puede funcionar de dos formas
distintas, una de las cuales se denomina Funcionamiento por Mando
Separado. Este tipo de funcionamiento permite que uno de los convertidores
actúe como rectificador o inversor en dos cuadrantes que corresponden a los
de la configuración de puente rectificador controlado sencillo. En este caso
no es posible establecer una variación de corriente en el sentido contrario
cuando la carga activa haga que la velocidad del sistema aumente por
encima de la velocidad de trabajo. Para realizar esta operación en este tipo
de funcionamiento es indispensable hacer que la corriente del circuito llegue
a cero y hacer que el otro convertidor entre en operación mediante la
excitación de las compuertas de sus tiristores.
Es preciso tener en cuenta que solo uno de los convertidores funciona al
tiempo al excitar los tiristores que lo conforman. La desventaja principal
funcionamiento por mando separado del convertidor trifásico dual, es que el
cambio de un convertidor a otro no se hace de forma continua.
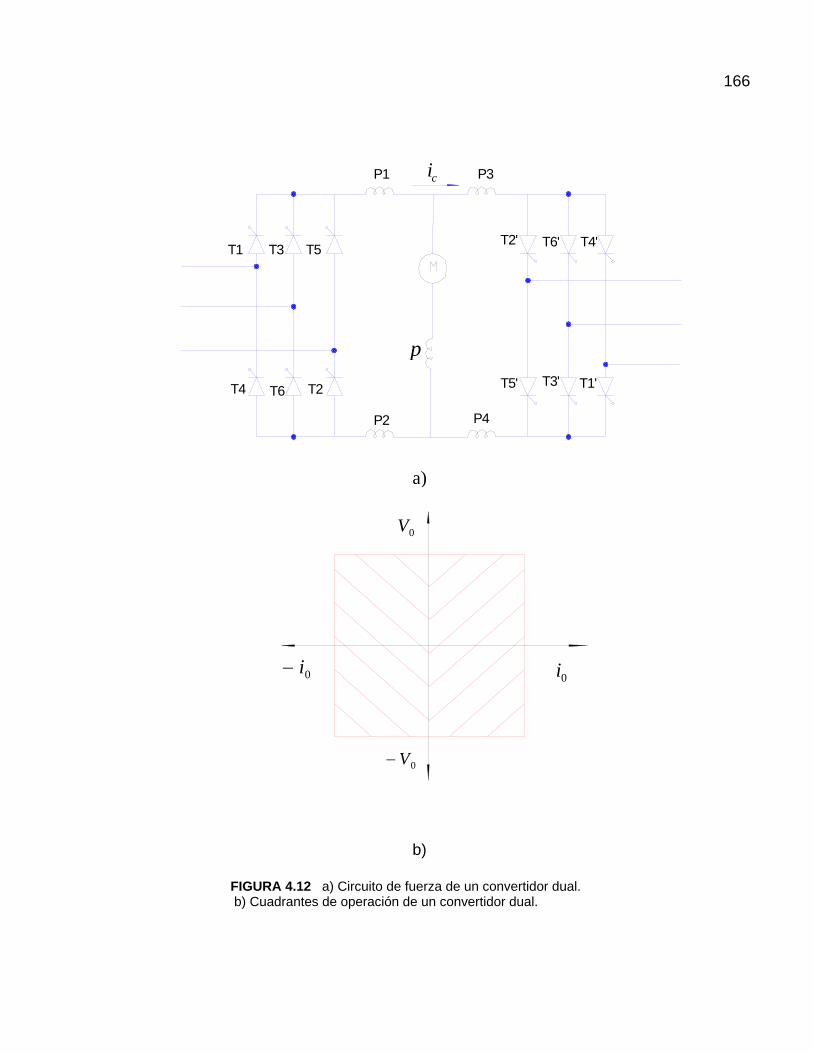
166
P1 P3
P2 P4
ci
T1
T2
T3
T4
T5
T6
T6'
T5'
T4'
T1'
T2'
T3'
p
a)
0i0i
0V
0V
FIGURA 4.12 a) Circuito de fuerza de un convertidor dual. b) Cuadrantes de operación de un convertidor dual.
b)
167
Esto se refleja en las curvas características mecánicas de salida del sistema
(figura 4.13).
El otro tipo de funcionamiento del convertidor dual, es el Funcionamiento
por Mando Conjunto. En este modo, los convertidores que lo conforman
funcionan a la vez. Uno de ellos funciona como rectificador y el otro como
inversor.
,0i
FIGURA 4.13 Características mecánicas y de velocidad de un convertidor dual con mando separado.
168
Cada convertidor establece una tensión con el mismo nivel promedio, pero
con diferentes valores instantáneos producidos por la desigualdad entre los
ángulos de disparo de cada convertidor.
Las características mecánicas y de velocidad en el mando conjunto son
líneas rectas, que a bajas velocidades no presentan discontinuidad de
corriente debido a la presencia de la corriente circulante. (Figura 4.16 b).
El ángulo de disparo del convertidor 1 es equivalente a 1 , mientras que el
convertidor 2 funciona con un ángulo de disparo igual a 12 .
El fenómeno anterior provoca una corriente circulante que es limitada por las
bobinas reactoras P1, P2, P3, P4.
La corriente circulante ci varía de modo que induce la tensión rV en las
bobinas reactoras y circula por el circuito aun sin existir carga, manteniendo
activos los convertidores del circuito.
La corriente ci no ingresa al circuito de la carga debido a que la carga exige
una corriente de tipo constante. 01V y 02V son los voltajes promedio o D.C de
salida en cada convertidor y los que determinan el sentido de la corriente a
través de la carga.
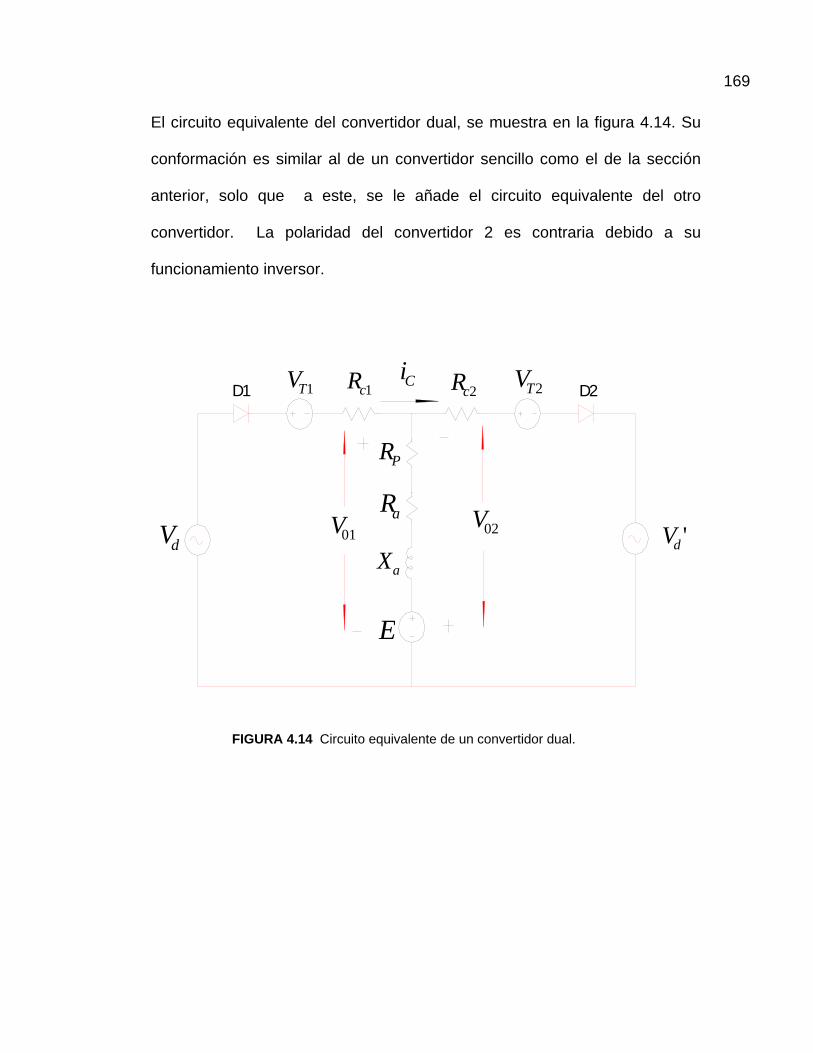
169
El circuito equivalente del convertidor dual, se muestra en la figura 4.14. Su
conformación es similar al de un convertidor sencillo como el de la sección
anterior, solo que a este, se le añade el circuito equivalente del otro
convertidor. La polaridad del convertidor 2 es contraria debido a su
funcionamiento inversor.
1TV 2TV
dV 'dV
2cR
PR
aR
aX
D1
02V
1cR Ci
E
01V
D2
FIGURA 4.14 Circuito equivalente de un convertidor dual.

170
Figura 4.15 Curvas de voltajes de los convertidores duales 01V , 02V y
corriente circulante ci .
cbV abVacV
t
01V
bcV02VacV
ci
t
t
0201 VVV r
baV
1
6
12
171
Los niveles de tensión promedio en cada convertidor son equivalentes y con
el fin de suministrar una corriente D.C a través de la carga, tienen la misma
polaridad debido a sus ángulos de disparo. En este caso el funcionamiento
del inversor, no permite que la energía suministrada a la carga, vaya de
nuevo a la red, debido a la igualdad de tensiones promedio suministradas por
ambos convertidores. Las formas de las ondas de voltaje de cada
convertidor, su diferencia instantánea y la forma de la corriente circulante se
aprecian en la figura 4.15.
4.3.2 Operación de un convertidor dual en funcionamiento por mando
conjunto. Para iniciar el análisis del comportamiento de un sistema de este
tipo es necesario asumir que el motor esta conectado a una carga cuya
respuesta de torque varia linealmente ante la variación de la velocidad como
se muestra en la figura 4.16.
El sistema electromecánico esta compuesto por un convertidor dual en
funcionamiento por mando conjunto, un motor D.C. y una carga acoplada al
eje.
En la figura 4.16 se muestran las características de velocidad y torque de
salida de la maquina dependientes del ángulo de disparo de los
convertidores, y también las características mecánicas de una carga que
varía.
172
La intersección de la curva característica de salida del motor determinada por
el ángulo de disparo y la característica mecánica de la carga, definen la
ubicación del punto de operación en los cuadrantes de funcionamiento del
sistema.
En el punto de operación 1, el convertidor 1 trabaja en régimen rectificador,
suministrando una tensión 0V de vacío al motor, en el cual se autoinduce una
tensión de carga equivalente a E .
Como la tensión del convertidor, hace que circule una corriente hacia la
maquina, se puede decir que en este caso ella funciona como motor.
Debido a que la tensión promedio del convertidor 2 es igual que la tensión
promedio del convertidor 1, la corriente no fluye hacia el convertidor 2 que
funciona con un ángulo de disparo entre 2
y .
Si se reduce la tensión de salida del convertidor desde 1 hasta 2 al aumentar
el valor del ángulo de disparo, la velocidad tiende a mantenerse debido a la
inercia de la carga, pero en este caso la tensión de salida del motor es mayor
que la tensión de salida entregada por el convertidor invirtiéndose el sentido
de la corriente en el motor, de modo que se genera energía, la cual se
entrega a la red a través del convertidor 2 que en este caso funciona como
inversor.
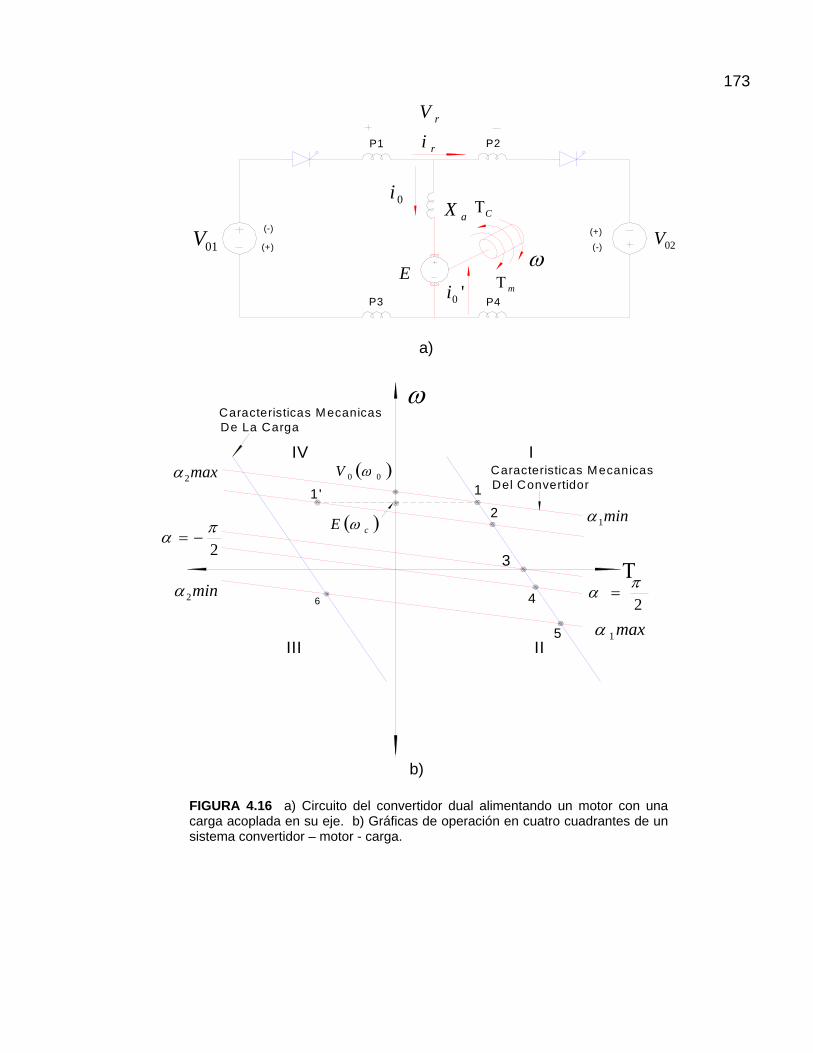
173
01V 02V
rV
0i
E
ri
(+)
(-)
(-)
(+)
'0i
P1 P2
P3 P4m
CaX
3
5
4
1'2
1
cE
00 V
min1
2
max1
6
IIV
III II
Caracteristicas MecanicasDe La Carga
Caracteristicas MecanicasDel Convertidor
min2
max2
2
a)
b)
FIGURA 4.16 a) Circuito del convertidor dual alimentando un motor con una carga acoplada en su eje. b) Gráficas de operación en cuatro cuadrantes de un sistema convertidor – motor - carga.
174
El cambio de sentido de la corriente a través del motor esta relacionado con
el valor del torque de carga, superior al torque motor.
El punto de trabajo del sistema bajo esta condición se encuentra en el
cuadrante IV designado por el punto 1’. Al transcurrir el tiempo la velocidad
del accionamiento disminuye hasta establecerse en el punto 2 debido a que
la energía cinética almacenada en la carga se esta entregando a la red.
En esta situación la maquina recobra su estado motor asumiendo de nuevo
el convertidor 1 el mando sobre la maquina a una tensión y velocidad
menores que en el punto 1. Si la disminución del voltaje de salida del
convertidor continúa, se llega a un estado en que la tensión de salida del
convertidor, no es suficiente para hacer que el motor gire. Esto hace que se
presente un equilibrio entre el torque de la carga y el torque efectuado por el
motor. La energía suministrada por el convertidor es en este caso, disipada
en la resistencia del devanado de la maquina. Lo anterior sucede en el punto
3 de la gráfica 4.16b.
En la transición del estado 3 al estado 4 se presenta un frenado a
contracorriente de la carga. El convertidor mantiene un pequeño voltaje de
salida que se suma a la tensión de polaridad contraria del motor, la cual esta
relacionada con el nuevo sentido de la velocidad impuesto por el torque de
carga. En este trayecto la tensión total, ocasiona una circulación una
175
corriente que crea grandes perdidas en la resistencia del devanado del
motor.
En el punto 4 cuando 21
, la tensión del convertidor es cero y la corriente
que circula por el circuito es provocada por la tensión inducida del motor
debida a la velocidad impuesta por la carga.
Cuando se llega al punto 5, el accionamiento está en el régimen de frenado
recuperativo. El convertidor 1 que actuaba como rectificador se convierte en
inversor debido a que su tensión cambia de polaridad y tiene magnitud menor
que la tensión suministrada por el motor. No es posible que haya circulación
de corriente a través del convertidor 2 debido a que la polaridad de sus
tiristores no lo permite. Como ya se menciono, la tensión de salida del motor
es mayor a la tensión de salida del convertidor devolviéndose energía a la
red.
Para ingresar al cuadrante III, el ángulo 1 debe ser mayor a 2
y por lo tanto
2 debe ser menor a 2
. En este proceso el torque de carga debe disminuir
hasta que la velocidad del motor haga que su tensión sea menor a la tensión
suministrada por el convertidor. El convertidor 2 asume el papel de
rectificador suministrando la energía al motor, necesaria para mover la carga.
176
Cabe anotar que en el funcionamiento por mando separado, se requiere de
un circuito de reconexión apaga el circuito convertidor que estaba
funcionando hasta que la corriente de la carga se hace nula y se prepara
para la conexión de cualquiera de los dos convertidores.
En el mando separado no existen corrientes circulantes, haciendo
complicado el paso de un cuadrante a otro. En este sistema no es necesario
la utilización de reactores, pero su utilización se limita para sistemas que
requieren trabajar en vacío o en bajas corrientes, debido a la zona de
corriente discontinua de la figura 4.13
Las ventajas que ofrece un convertidor de este tipo al trabajar con corriente
circulante son:
Debido a que uno de los convertidores funciona como inversor y el otro como
rectificador, el flujo de potencia se puede presentar en cualquier dirección.
El tiempo de respuesta es más rápido, al pasar de un funcionamiento de un
cuadrante a otra.
Siempre hay una circulación de corriente sobre todo el rango de control,
independiente de la carga.
177
4.3.3 Variación del voltaje por medio de convertidores cd-cd o
pulsadores. El voltaje del motor de excitación separada se puede variar,
mediante su conexión y desconexión de forma periódica generando un tren
de pulsos al operar un interruptor en serie con la fuente de alimentación D.C.
El circuito mediante el cual se logra este funcionamiento se llama pulsador y
es la simple conexión entre una fuente de D.C, el motor y un interruptor que
pueda ser accionado a alta frecuencia. Esta función es ejecutada por
semiconductores controlados como los tiristores. En la figura 4.17 se
presenta la conexión de un circuito pulsador común.
En la figura 4.18 se aprecian las señales de salida de voltaje y corriente de
este tipo de circuito. Durante el periodo 1t el motor se encuentra conectado a
la fuente. En este estado la corriente 1ai comienza su incremento
efectuándose una transferencia de energía desde la fuente hasta la carga
mecánica, almacenándose una parte en forma de energía cinética y otra en
forma de energía magnética en el inductor.
En el periodo 2t , el motor se desconecta de la fuente y una corriente 2ai
circula en el mismo sentido de la corriente anterior a través del diodo debido
al desalojamiento de energía almacenada inicialmente en la inductancia y la
carga del motor.
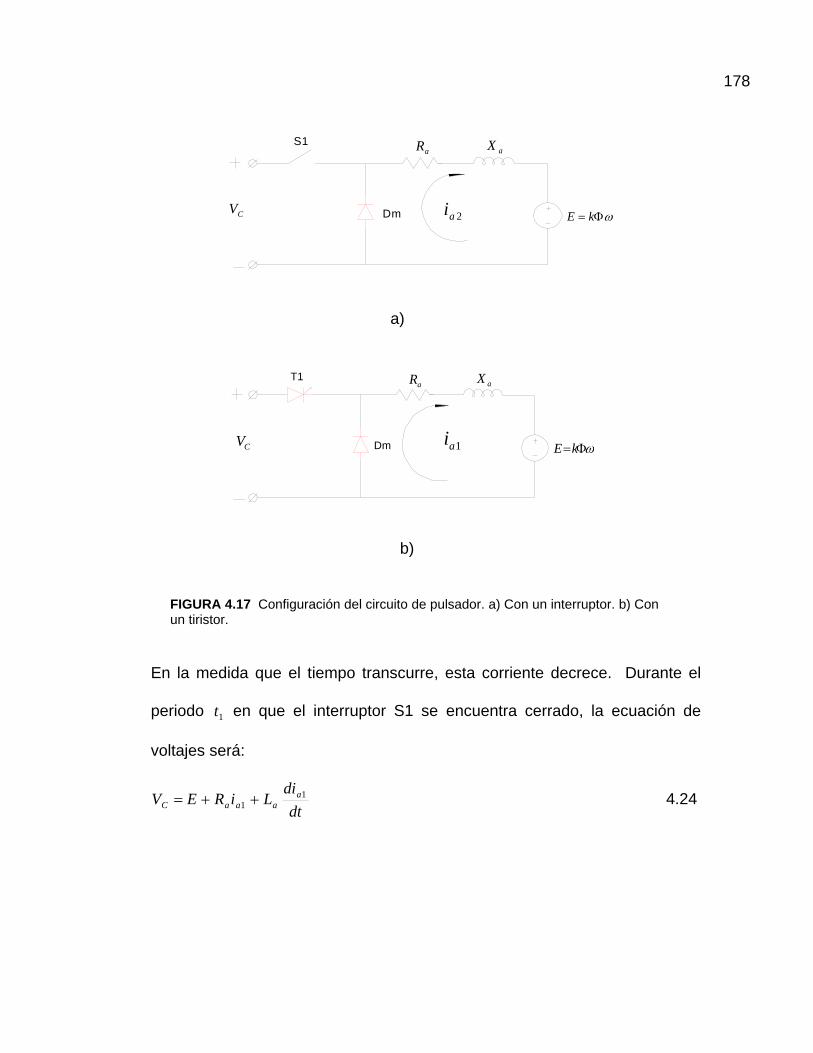
178
En la medida que el tiempo transcurre, esta corriente decrece. Durante el
periodo 1t en que el interruptor S1 se encuentra cerrado, la ecuación de
voltajes será:
dt
diLiREV a
aaaC1
1 4.24
CV kE
aR aX
Dm 2ai
S1
CV kE
aR aXT1
Dm 1ai
a)
b)
FIGURA 4.17 Configuración del circuito de pulsador. a) Con un interruptor. b) Con un tiristor.

179
Donde la tensión E de la ecuación 4.24 es dependiente de la velocidad del
motor, siendo:
1 kE 4.25
La ecuación de torques en el periodo 1t indica que en este lapso, la carga
inercial tiende a aumentar su velocidad:
dt
djcm
11
4.26
En la ecuación 4.26 se tiene una función de torque motor de respuesta 1m
dependiente de la función de velocidad 1 durante un lapso de tiempo 1t .
0V
CV
t
1t 2t
t
1ai 2ai
1aI
0i
PI
T
KT
FIGURA 4.18 Curvas de voltaje y corriente del motor D.C. durante los periodos de cierre y apertura del interruptor S1.

180
El valor de torque motor es dependiente de la corriente que circula por la
armadura de la maquina, siendo:
11 am ik 4.27
Al resolver la ecuación diferencial 4.24 del circuito de la figura 4.17 durante el
periodo de tiempo 1t , con la condición inicial 11 0 aa Iti .
La ecuación solución obtenida es:
tL
R
a
ct
L
R
aaa
a
a
a
eR
EVeIti 1)( 111 4.28
La solución de esta ecuación es valida desde el tiempo inicial 0t hasta el
tiempo KT . Durante este intervalo la corriente es creciente almacenándose
energía en la inductancia.
Para el periodo 2t en el cual el interruptor S1 se encuentra abierto, la
ecuación de voltajes del circuito se hace:
dt
diLiRE a
aaa2
20 4.29
El valor de la tensión E del motor depende de la velocidad 2 así:
2 kE 4.30
La ecuación de torques para el periodo 2t , se escribe de la siguiente forma:
dt
djcm
2

181
En la expresión anterior se tienen el torque 2m y un valor de velocidad 2 ,
que se presentan solo en tiempo 2t .
El valor del torque motor respecto a la corriente 2ai es:
22 am ik 4.31
La respuesta natural de la corriente 2ai en el sistema:
a
a
a
a
L
R
a
tL
R
aa eR
EeIti 1)( 222
Donde la condición inicial 22 0 aa Iti .
Por la forma periódica que tienen las señales de voltaje y corriente del
sistema cuasiestacionario, se deben calcular valores promedio de velocidad,
corriente, voltaje y torque.
Según el párrafo anterior el torque promedio motor p , se evalúa de la
siguiente manera:
T t
m
t
mmp dtdtT
dt0
2
0 2
1
0 1 )(1
4.32
Se debe recordar que el valor del periodo T es un valor constante igual a:
21 ttT
182
De las ecuaciones de torque se despejan los valores de 1m y 2m en
función de C .
1
0
2
0
21(1 t t
CCp dtdt
djdt
dt
dj
T
Al resolver las integrales en los respectivos intervalos de tiempo, se obtiene
la siguiente expresión:
2121
1 jttT Cp 4.33
En un sistema cuasiestacionario durante el disturbio ocasionado por el cierre
del interruptor, la velocidad tiene un incremento 1 . Al abrir el interruptor la
respuesta del sistema se manifiesta con un descenso de la velocidad
representado por un valor 2 . Al final del periodo T estas variaciones de
velocidad al ser iguales y opuestas se contrarrestan, permitiendo que el valor
final sea igual al valor inicial 21 .
De lo anterior se obtiene que el cambio de energía cinética total del sistema
es igual a:
021 j
En este sistema el torque promedio motor durante el periodo T es igual al
torque de carga.
Cp
La corriente promedio pI en todo el periodo T es:

183
t t t
aaap dtidtiT
iT
I0 0 0 21
1 211 4.34
Reemplazando los valores de corrientes de las ecuaciones 4.24 y 4.29, sin
tener en cuenta las expresiones de los valores transitorios.
1
0
2
0
22
11 )()(
1 t ta
aa
aCa
p dtdt
diLkdt
dt
diLkV
TRI
210 0 211 1 2
aaa
at t
aaCp ii
TR
Ldtdt
TR
k
TR
tVI
Donde la velocidad promedio en la ecuación anterior es la expresión:
1 2
0 0 21
1 t t
p dtdtT
4.35
De igual forma que sucede al evaluar el torque promedio, en un sistema que
trabaja de forma cuasiestacionaria, la componente oscilatoria de corriente es
igual a cero ya que sus variaciones son equivalentes. Esto es:
21 aa ii
De lo anterior se puede afirmar que el cambio total de la energía magnética
en el periodo T es igual a cero.
021 aaa
a iiTR
L
La corriente promedio del este sistema se expresa de la siguiente forma:
a
p
aCp R
k
TR
tVI
1 4.36
La expresión para la corriente promedio queda:
PCpa kKVIR
184
Donde la T
tK 1 representa el ciclo de trabajo del pulsador.
Del análisis anterior para el torque y la corriente promedio se puede llegar a
las ecuaciones de características de velocidad y mecánicas del motor D.C
conectado a un pulsador.
k
IRKV paCP 4.37
paC
Pk
R
k
KV
2 4.38
En las ecuaciones 4.37 y 4.38 se aprecia la influencia que tiene el ciclo de
trabajo K sobre la velocidad del motor. La variación del ciclo de trabajo se
logra modificando el tiempo de cierre 1t del interruptor, manteniendo
constante la duración del periodo T . A este método se le conoce como
Modulación de Ancho de Pulso o modulación a frecuencia constante, ya
que T
f1
. Otro método para obtener la modificación del valor del ciclo de
trabajo, es variar el periodo T dejando 1t constante, este método es
denominado Modulación a Frecuencia Variable.
Las características mecánicas y de velocidad son apreciadas en la figura
4.20. En esta gráfica cada línea recta representa una característica del motor
funcionando a una tensión, determinada por el valor del ciclo de trabajo.
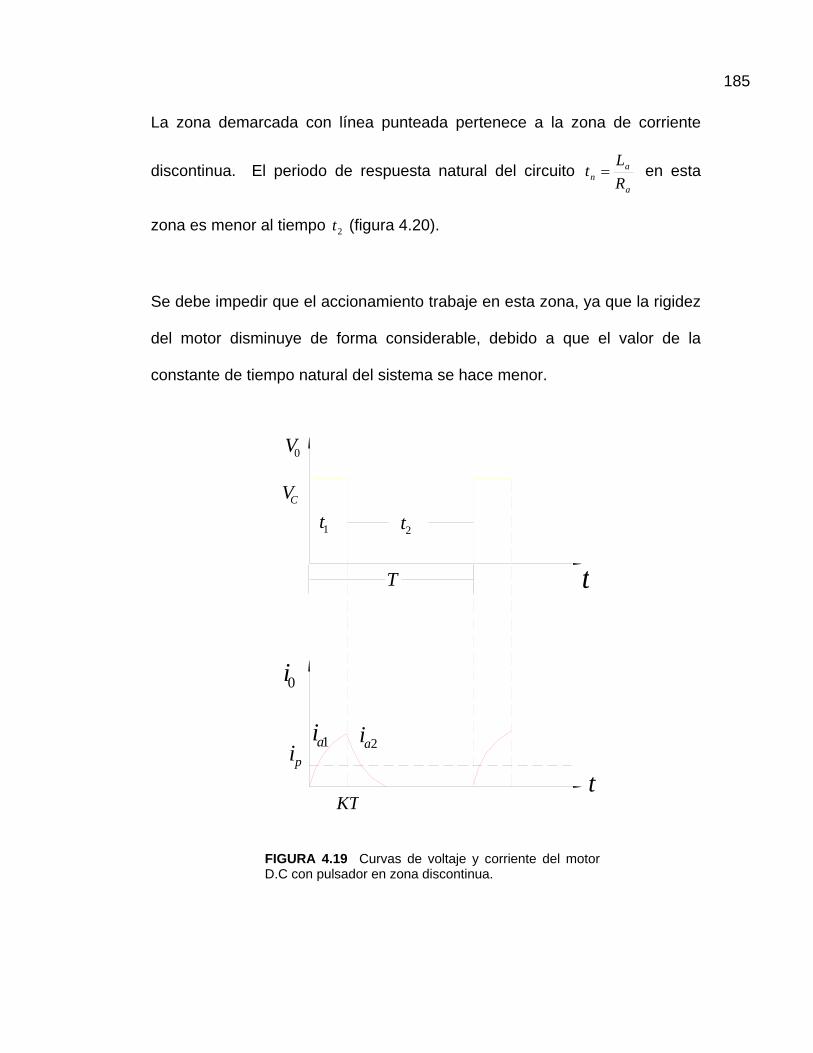
185
La zona demarcada con línea punteada pertenece a la zona de corriente
discontinua. El periodo de respuesta natural del circuito a
an R
Lt en esta
zona es menor al tiempo 2t (figura 4.20).
Se debe impedir que el accionamiento trabaje en esta zona, ya que la rigidez
del motor disminuye de forma considerable, debido a que el valor de la
constante de tiempo natural del sistema se hace menor.
0V
1tCV
2t
t
1ai 2ai
t
0i
pi
KT
T
FIGURA 4.19 Curvas de voltaje y corriente del motor D.C con pulsador en zona discontinua.

186
Hasta este momento se ha tratado el funcionamiento de un tipo de pulsador
con el cual es posible trabajar en un solo cuadrante, denominado pulsador
clase A. (figura 4.21).
p
ppI ,
1K
5.0K
0K
FIGURA 4.20 Características mecánicas y de velocidad del motor D.C con pulsador.
0V
0i
FIGURA 4.21 Cuadrante de operación de un pulsador clase A.
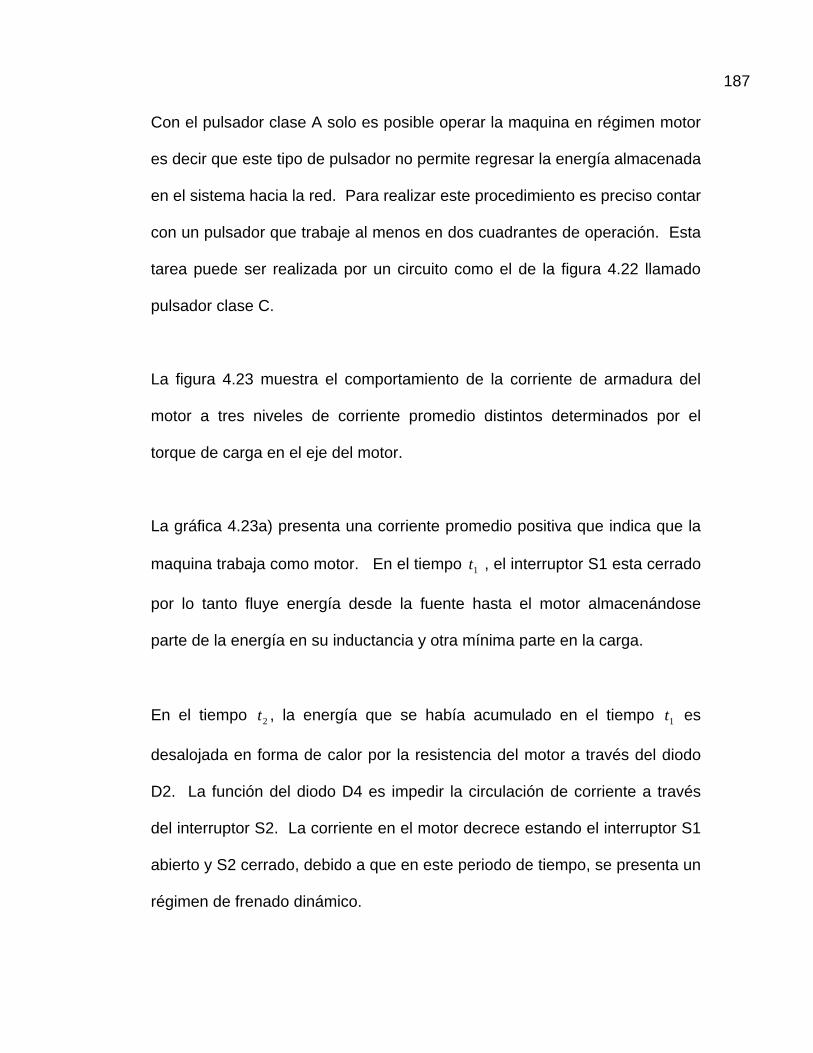
187
Con el pulsador clase A solo es posible operar la maquina en régimen motor
es decir que este tipo de pulsador no permite regresar la energía almacenada
en el sistema hacia la red. Para realizar este procedimiento es preciso contar
con un pulsador que trabaje al menos en dos cuadrantes de operación. Esta
tarea puede ser realizada por un circuito como el de la figura 4.22 llamado
pulsador clase C.
La figura 4.23 muestra el comportamiento de la corriente de armadura del
motor a tres niveles de corriente promedio distintos determinados por el
torque de carga en el eje del motor.
La gráfica 4.23a) presenta una corriente promedio positiva que indica que la
maquina trabaja como motor. En el tiempo 1t , el interruptor S1 esta cerrado
por lo tanto fluye energía desde la fuente hasta el motor almacenándose
parte de la energía en su inductancia y otra mínima parte en la carga.
En el tiempo 2t , la energía que se había acumulado en el tiempo 1t es
desalojada en forma de calor por la resistencia del motor a través del diodo
D2. La función del diodo D4 es impedir la circulación de corriente a través
del interruptor S2. La corriente en el motor decrece estando el interruptor S1
abierto y S2 cerrado, debido a que en este periodo de tiempo, se presenta un
régimen de frenado dinámico.
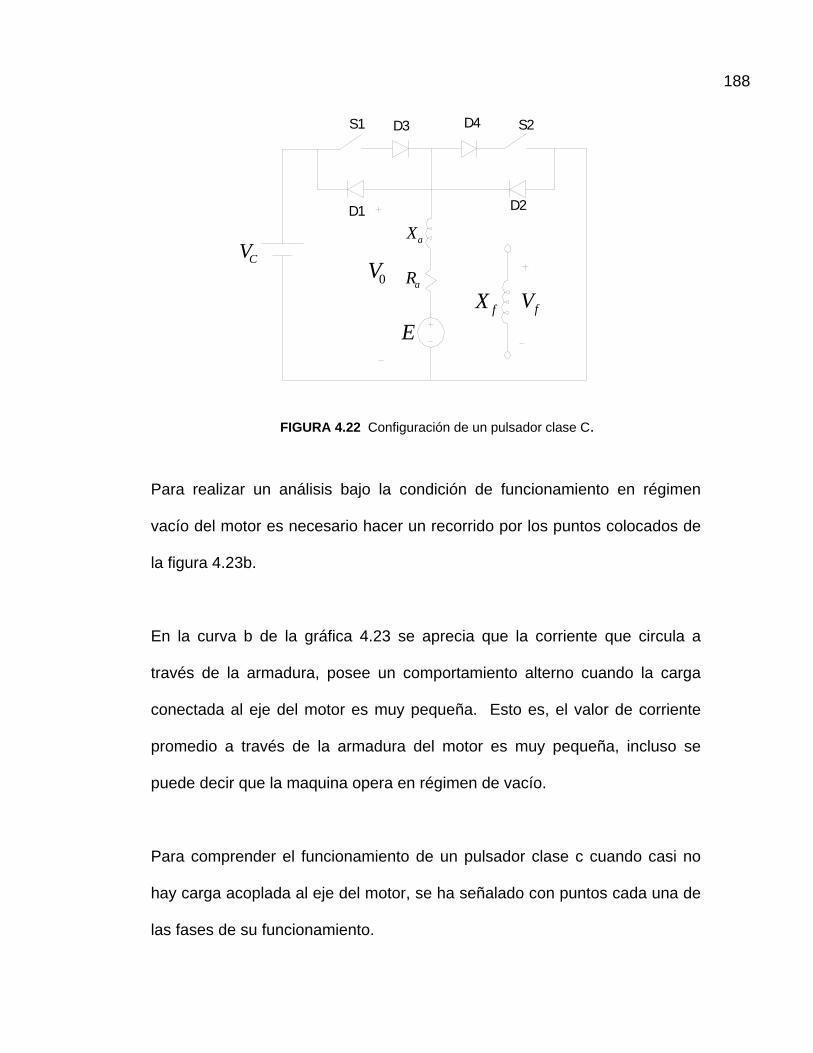
188
Para realizar un análisis bajo la condición de funcionamiento en régimen
vacío del motor es necesario hacer un recorrido por los puntos colocados de
la figura 4.23b.
En la curva b de la gráfica 4.23 se aprecia que la corriente que circula a
través de la armadura, posee un comportamiento alterno cuando la carga
conectada al eje del motor es muy pequeña. Esto es, el valor de corriente
promedio a través de la armadura del motor es muy pequeña, incluso se
puede decir que la maquina opera en régimen de vacío.
Para comprender el funcionamiento de un pulsador clase c cuando casi no
hay carga acoplada al eje del motor, se ha señalado con puntos cada una de
las fases de su funcionamiento.
CV0V
aX
aR
EfX fV
D3 D4S1 S2
D1 D2
FIGURA 4.22 Configuración de un pulsador clase C.
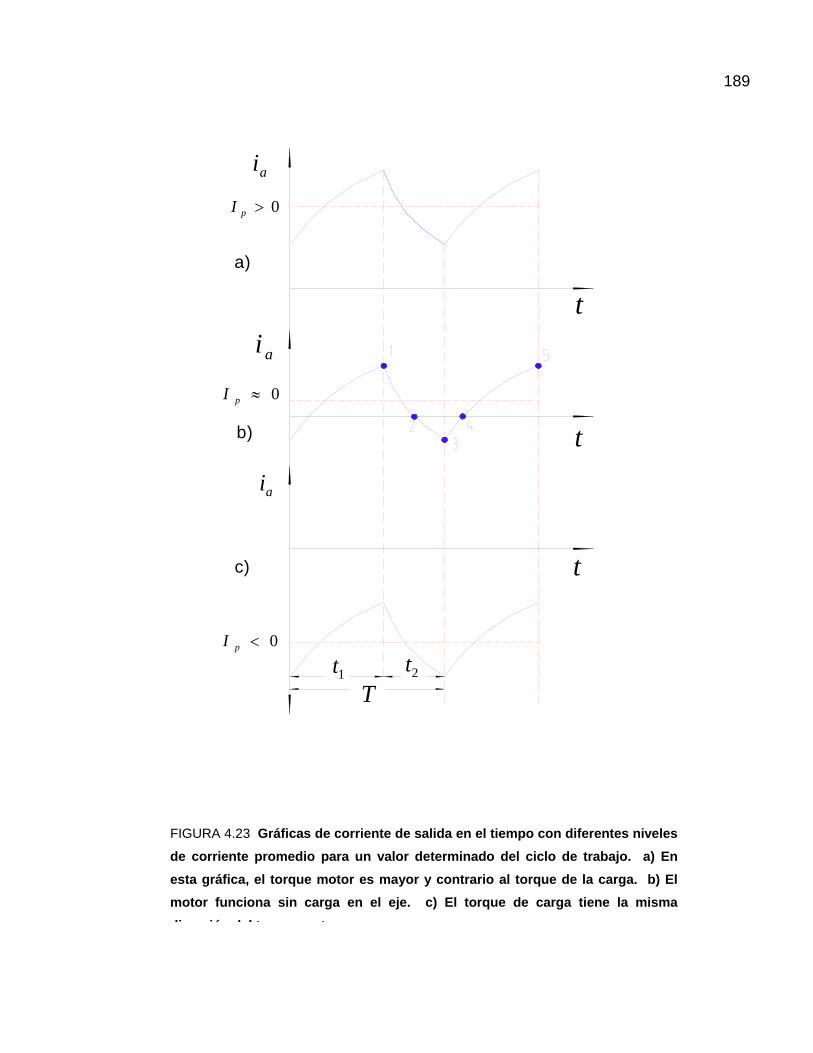
189
FIGURA 4.23 Gráficas de corriente de salida en el tiempo con diferentes niveles
de corriente promedio para un valor determinado del ciclo de trabajo. a) En
esta gráfica, el torque motor es mayor y contrario al torque de la carga. b) El
motor funciona sin carga en el eje. c) El torque de carga tiene la misma
di ió d l t t
ai
0pI
t
ai
0pI
t
ai
t
0pI
1t 2tT
a)
b)
c)
190
Se asume que debido al aumento de corriente durante el periodo 1t que el
interruptor S1 estuvo cerrado, se almaceno una energía magnética en la
inductancia del motor, y una mínima parte de energía cinética en el eje del
motor.
Cuando es cerrado el interruptor S2, en el intervalo De 1 a 2, la energía del
inductor es desalojada, manifestándose en el intento por conservar el
anterior sentido de la corriente, la cual circula a través del diodo D2. En este
pequeño lapso de tiempo la maquina funciona como motor pero impulsado
por la corriente decreciente que le ofrece la inductancia de la armadura.
En el instante 2, toda la energía magnética ha sido desalojada del inductor.
El interruptor S2 continua cerrado y es a partir de este punto que se inicia la
inversión del sentido de la corriente ya que, la fem autoinducida E hace
circular una corriente a través del interruptor S2 y el diodo D4. En este caso
la maquina trabaja en régimen de frenado dinámico desalojándose parte de
la energía cinética almacenada en el eje del motor, la cual se pierde en la
resistencia del devanado de la maquina.
Al cerrarse de nuevo el interruptor S1 y abrirse el interruptor S2, el eje del
motor conserva aun parte de energía cinética, la cual es desalojada
totalmente hacia la red a través del diodo D1, esto es en el punto 4. En este
191
pequeño tiempo de 3 a 4 la maquina funciona en régimen de frenado
recuperativo.
Cuando el torque de carga se dirige en el mismo sentido del torque motor, la
fem inducida en el motor, es de mayor valor que la tensión de entrada debido
a que la velocidad del motor se hace mayor que su velocidad de vacío.
Debido a esto, se presenta en la maquina un constante frenado recuperativo
(figura4.23c).
En el intervalo 2t el circuito de armadura se cierra a través de S2. En este
periodo la corriente de frenado a través de S2 crece acumulándose un valor
de energía en la inductancia del motor.
En el intervalo 1t , el interruptor S2 se abre, y se cierra el interruptor S1
desalojándose la energía magnética de la inductancia a través del diodo D1
hasta la red.
La figura 4.25 muestra las curvas características mecánicas de salida a
través de un motor, con un pulsador clase c.
Obsérvese que la velocidad del sistema se conserva y que debido a la
variación del valor de la carga en puntos de intersección de la curva de

192
0V
0i0i
FIGURA 4.24 Cuadrantes de operación pulsador clase C.
Regimen motor con
traves de la armaduracorriente alterna a
Regimen motor
Regimen generador p
5.0K
1K
0Kppi ,
FIGURA 4.25 Características mecánicas y de velocidad pulsador clase C.
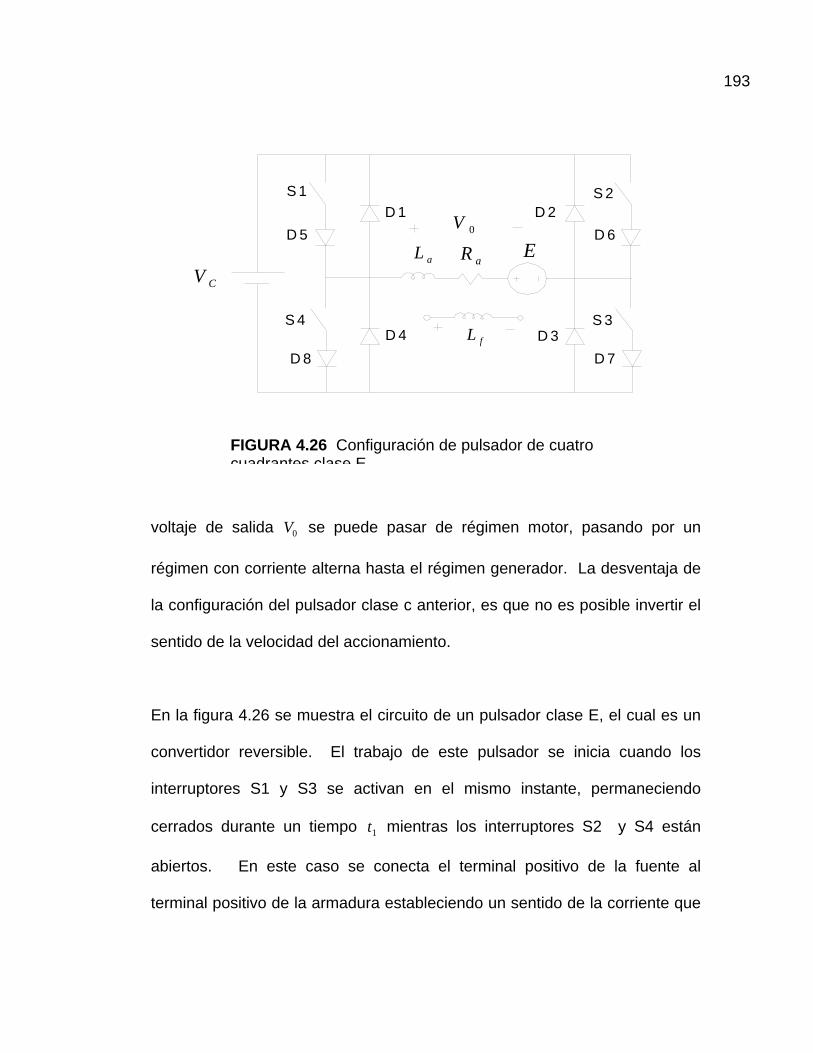
193
voltaje de salida 0V se puede pasar de régimen motor, pasando por un
régimen con corriente alterna hasta el régimen generador. La desventaja de
la configuración del pulsador clase c anterior, es que no es posible invertir el
sentido de la velocidad del accionamiento.
En la figura 4.26 se muestra el circuito de un pulsador clase E, el cual es un
convertidor reversible. El trabajo de este pulsador se inicia cuando los
interruptores S1 y S3 se activan en el mismo instante, permaneciendo
cerrados durante un tiempo 1t mientras los interruptores S2 y S4 están
abiertos. En este caso se conecta el terminal positivo de la fuente al
terminal positivo de la armadura estableciendo un sentido de la corriente que
S 1
S 4
S 2
S 3D 3
D 1
D 4
D 5
D 2
D 6
D 7D 8
EaR
fL
aL
CV
0V
FIGURA 4.26 Configuración de pulsador de cuatro cuadrantes clase E
194
hace funcionar a la maquina en el primer cuadrante en régimen de motor. La
inductancia del motor acumula energía magnética en este instante.
Cuando S1 y S3 son desactivados y se activan S2 y S4, la tensión de la
inductancia que en ese instante tiene de dos a tres veces el valor de la
fuente, se invierte y permite la polarización en un breve lapso de tiempo de
los diodos D2 y D4 devolviendo la energía acumulada en ella hacia la red.
En este instante la polaridad del voltaje 0V cambia y el sentido de la corriente
se establece a través de los diodos D6 y D8 y los interruptores S2 y S4. El
motor continúa en el mismo cuadrante de operación y la tensión CV se ubica
entre la inductancia y la armadura.
La armadura suministra en este caso la tensión E que se suma a la tensión
CV pero que es contraria a la tensión de la inductancia. Cuando la energía
acumulada en la inductancia se ha desalojado, se produce un cambio de
sentido en la corriente a través de la armadura, lo que obliga a que el motor
pierda energía cinética debido a que se presenta un frenado a
contracorriente a través de la inductancia. Esto hace que la inductancia
acumule energía magnética y se prepare para entregarla de nuevo a la red.
La ventaja de esta configuración es que en los cuatro cuadrantes de
operación se tiene la misma conmutación de interruptores, pero

195
desafortunadamente existe una amplia zona del plano de los cuatro
cuadrantes del motor, pero esto ocurre cuando el nivel promedio de corriente
es bajo y la energía acumulada en la inductancia es mínima. En este caso la
operación del motor se hace con una circulación de corriente alterna a través
de su armadura, lo que implica incrementos de perdidas por corrientes
parásitas.
El voltaje promedio para la anterior configuración es:
1
0 1
1 t T
t CCp dtVdtVT
V
TtT
VV C
p 12
0V
0V
0i 0i
FIGURA 4.27 Cuadrantes de operación del pulsador clase E.
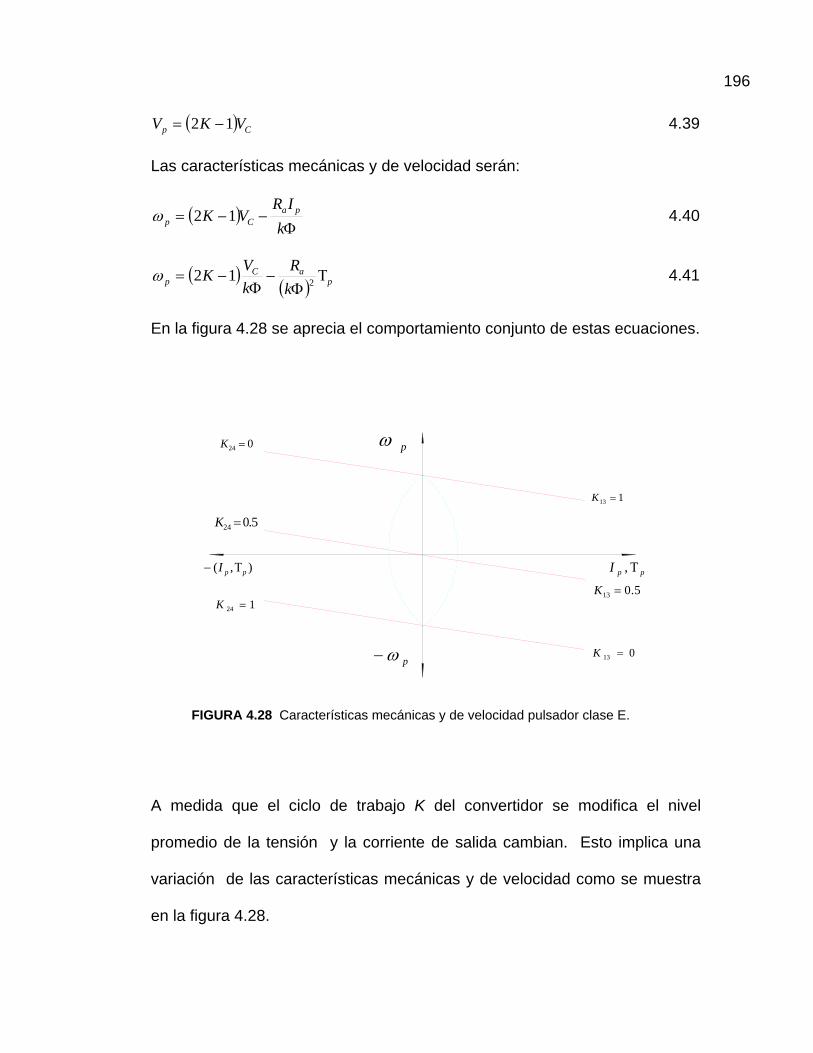
196
Cp VKV 12 4.39
Las características mecánicas y de velocidad serán:
k
IRVK pa
Cp 12 4.40
p
aCp
k
R
k
VK
212 4.41
En la figura 4.28 se aprecia el comportamiento conjunto de estas ecuaciones.
A medida que el ciclo de trabajo K del convertidor se modifica el nivel
promedio de la tensión y la corriente de salida cambian. Esto implica una
variación de las características mecánicas y de velocidad como se muestra
en la figura 4.28.
024 K
113 K
5.024 K
124 K5.013 K
013 K
p
ppI ,),( ppI
p
FIGURA 4.28 Características mecánicas y de velocidad pulsador clase E.
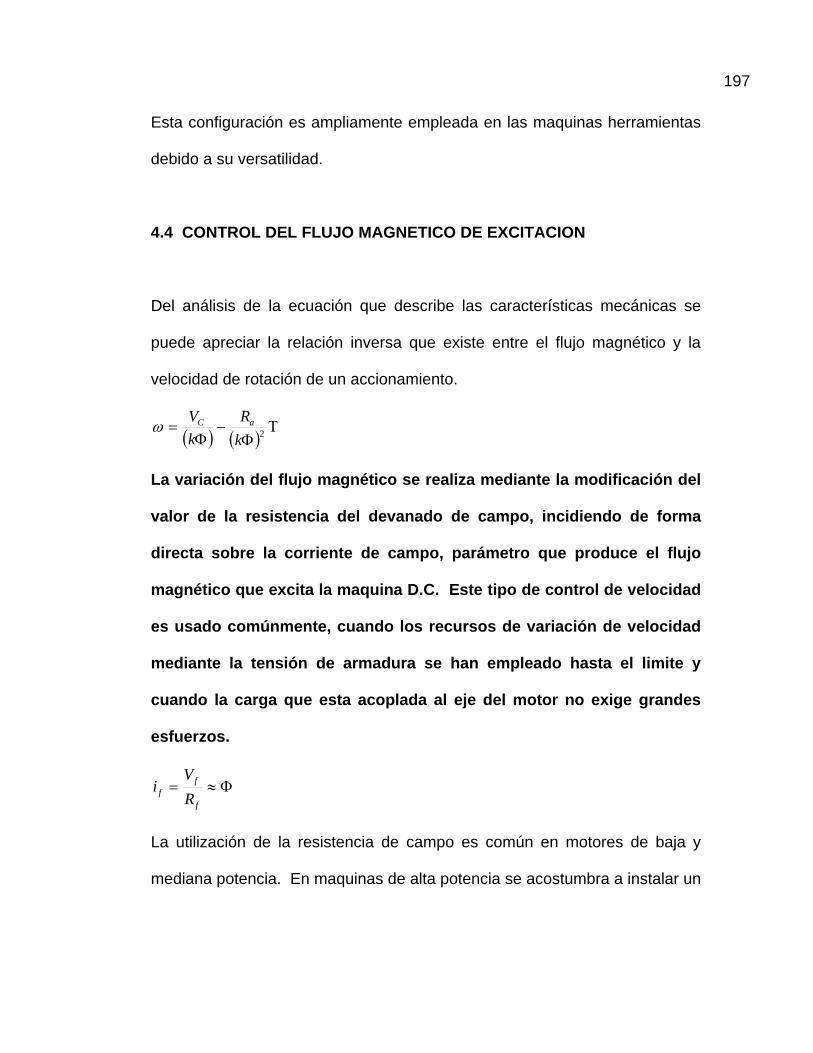
197
Esta configuración es ampliamente empleada en las maquinas herramientas
debido a su versatilidad.
4.4 CONTROL DEL FLUJO MAGNETICO DE EXCITACION
Del análisis de la ecuación que describe las características mecánicas se
puede apreciar la relación inversa que existe entre el flujo magnético y la
velocidad de rotación de un accionamiento.
2k
R
k
V aC
La variación del flujo magnético se realiza mediante la modificación del
valor de la resistencia del devanado de campo, incidiendo de forma
directa sobre la corriente de campo, parámetro que produce el flujo
magnético que excita la maquina D.C. Este tipo de control de velocidad
es usado comúnmente, cuando los recursos de variación de velocidad
mediante la tensión de armadura se han empleado hasta el limite y
cuando la carga que esta acoplada al eje del motor no exige grandes
esfuerzos.
f
ff R
Vi
La utilización de la resistencia de campo es común en motores de baja y
mediana potencia. En maquinas de alta potencia se acostumbra a instalar un
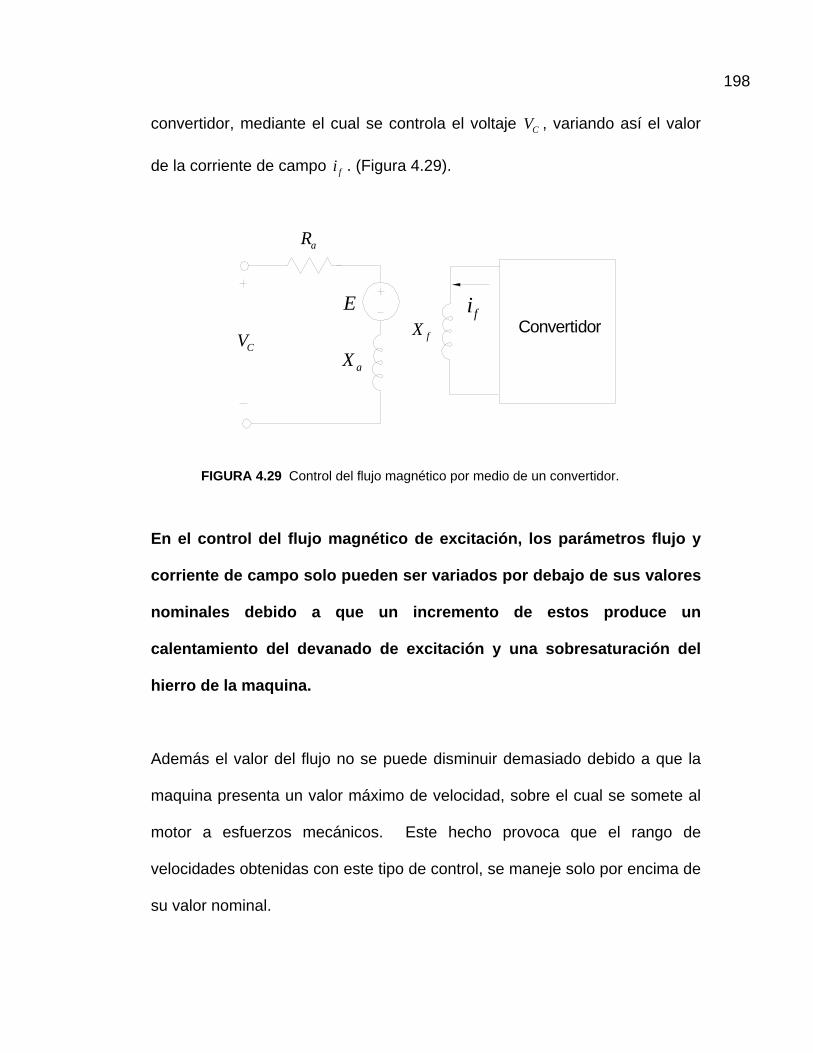
198
convertidor, mediante el cual se controla el voltaje CV , variando así el valor
de la corriente de campo fi . (Figura 4.29).
En el control del flujo magnético de excitación, los parámetros flujo y
corriente de campo solo pueden ser variados por debajo de sus valores
nominales debido a que un incremento de estos produce un
calentamiento del devanado de excitación y una sobresaturación del
hierro de la maquina.
Además el valor del flujo no se puede disminuir demasiado debido a que la
maquina presenta un valor máximo de velocidad, sobre el cual se somete al
motor a esfuerzos mecánicos. Este hecho provoca que el rango de
velocidades obtenidas con este tipo de control, se maneje solo por encima de
su valor nominal.
aR
CV
E
aX
fXfi
Convertidor
FIGURA 4.29 Control del flujo magnético por medio de un convertidor.
199
En el proceso de controlar el flujo magnético de un motor D.C, se presentan
dos fenómenos que deben ser analizados de forma detallada. Al disminuir el
flujo magnético de excitación, la corriente de armadura ai aumenta debido a
la reducción de la tensión inducida E. Esto se aprecia en la siguiente
ecuación:
a
Ca R
EVi
4.41
La proporción del incremento de la corriente de armadura ai es mucho mayor
al decrecimiento del flujo, por lo tanto se produce un aumento en el torque de
salida del motor, esto hace que la velocidad en el eje aumente
incrementando a su vez la tensión inducida E .
El efecto anterior hace que la corriente de armadura disminuya, ocasionando
la estabilización del torque motor en un valor menor para equilibrarse con el
torque de carga a una velocidad más alta que la inicial. (Este proceso se
explica en los puntos 1 y 2 de la figura 4.30).
Esta explicación paso a paso permite concluir que al reducir el flujo
magnético se presenta una elevación de la velocidad con un considerable
incremento de la corriente de armadura.
200
Las características mecánicas que se obtienen al debilitar el campo
magnético se presenta en la figura 4.30.
La velocidad de vacío
k
Vc0 se incrementa a medida que el flujo
disminuye. La rigidez por el contrario decrece sensiblemente
aR
kK
2 ,
debido a su relación inversa con el cuadrado del flujo magnético. Con lo
anterior se puede predecir que al incrementarse la velocidad, la pendiente de
las características mecánicas se hace muy empinada convirtiendo al
accionamiento en un sistema inestable de acuerdo a la disminución del flujo.
El comportamiento de la corriente de armadura tiene un importante tiene
importantes implicaciones energéticas, ya que al incrementarse, ocasiona un
aumento en las perdidas de la resistencia de la armadura P .
Mediante el control por flujo de campo, debe tenerse en cuenta que la
potencia no debe ser excedida de un valor limite. Cuando se presenta una
variación del flujo de campo, un incremento en el valor de la corriente puede
hacer que la potencia exceda su valor limite, y por tanto, se pueda presentar
la rotura de la maquina.
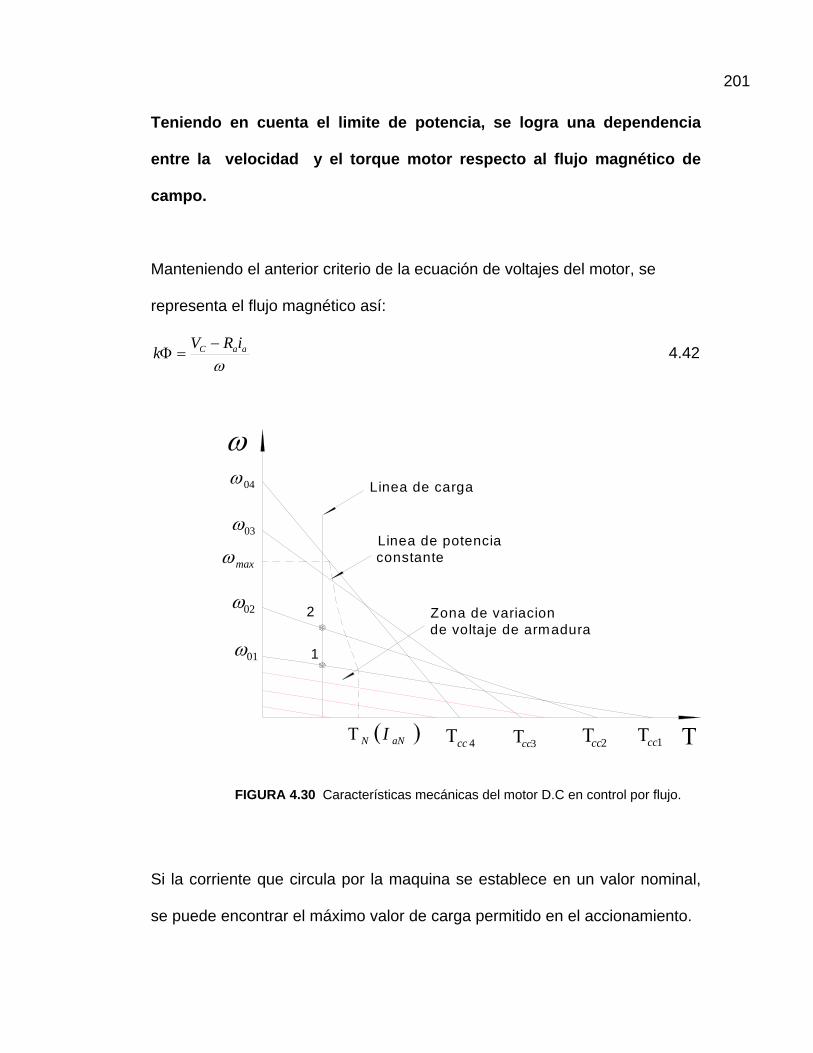
201
Teniendo en cuenta el limite de potencia, se logra una dependencia
entre la velocidad y el torque motor respecto al flujo magnético de
campo.
Manteniendo el anterior criterio de la ecuación de voltajes del motor, se
representa el flujo magnético así:
aaC iRV
k
4.42
Si la corriente que circula por la maquina se establece en un valor nominal,
se puede encontrar el máximo valor de carga permitido en el accionamiento.
4cc 1cc2cc3cc
04
01
02
03
max
aNN I
Linea de potenciaconstante
Linea de carga
Zona de variacionde voltaje de armadura
1
2
FIGURA 4.30 Características mecánicas del motor D.C en control por flujo.
202
2IaNaaNC
aN
IRIVIk
4.43
Reemplazando en la ecuación en términos de potencias:
eC
N
PPP
4.44
El numerador de la expresión permanece constante, independientemente del
valor del flujo magnético. Este proceso se llama Control a Potencia
Constante, el cual es apreciado en línea de puntos en la figura 4.30.
perconstanteP
Este control es utilizado de forma común en los servomotores, debido a que
su funcionamiento es a bajas velocidades, y en esta zona la variación del
flujo provoca un impreciso control de la velocidad y una segura disminución
del torque motor.
4.5 CONTROL REOSTATICO
La ecuación de característica mecánica del motor DC vista en el capitulo 2 y
en la sección del control por flujo, permite apreciar que la velocidad depende
de la resistencia de armadura.
En la gráfica 4.31 se observa la configuración circuital que debe realizarse
para ejecutar este tipo de control. El método consiste en instalar un reostato
en serie con la armadura del motor en su forma más elemental o también
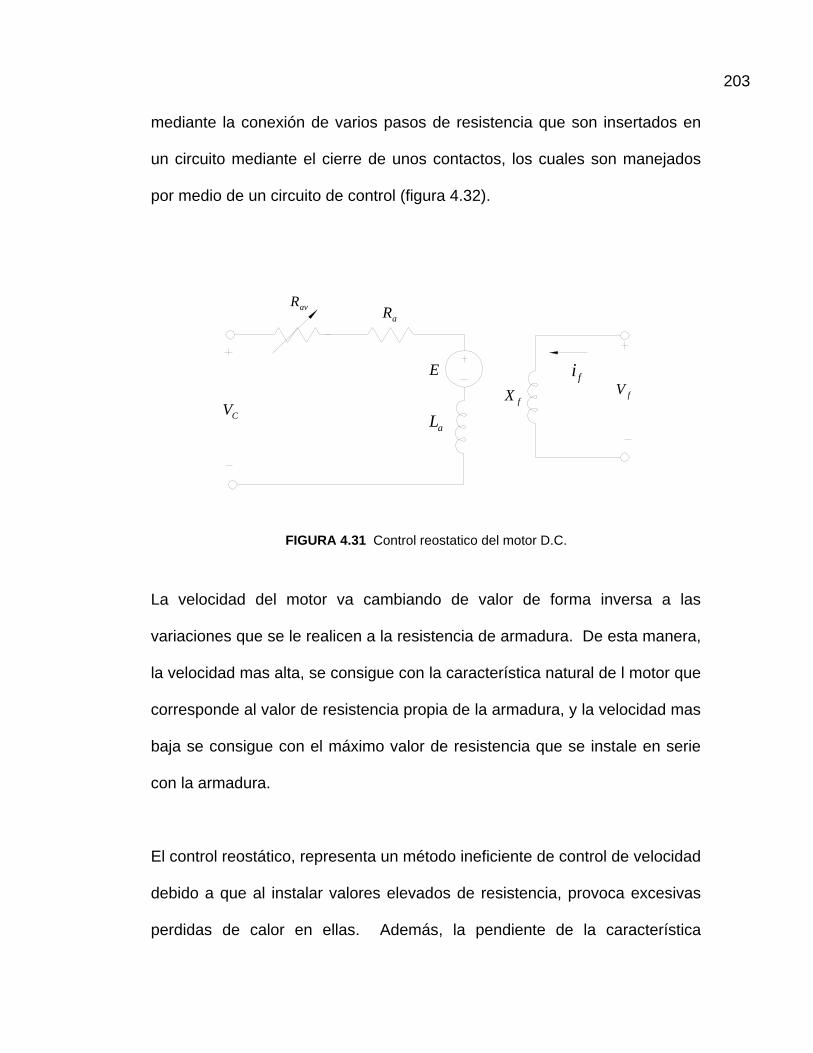
203
mediante la conexión de varios pasos de resistencia que son insertados en
un circuito mediante el cierre de unos contactos, los cuales son manejados
por medio de un circuito de control (figura 4.32).
La velocidad del motor va cambiando de valor de forma inversa a las
variaciones que se le realicen a la resistencia de armadura. De esta manera,
la velocidad mas alta, se consigue con la característica natural de l motor que
corresponde al valor de resistencia propia de la armadura, y la velocidad mas
baja se consigue con el máximo valor de resistencia que se instale en serie
con la armadura.
El control reostático, representa un método ineficiente de control de velocidad
debido a que al instalar valores elevados de resistencia, provoca excesivas
perdidas de calor en ellas. Además, la pendiente de la característica
CV
avRaR
fVE
fXfi
aL
FIGURA 4.31 Control reostatico del motor D.C.
204
mecánica se hace mas inclinada, disminuyendo el valor de rigidez,
convirtiendo el accionamiento en un sistema inestable. Esto quiere decir que
ligeras variaciones del torque de carga, provocan grandes variaciones de
velocidad en el eje.
Para analizar el nivel de perdidas, en el control reostático, se parte de la
expresión que representa la caída de tensión en la armadura.
EViR Caa 4.45
Multiplicando en ambos lados de la ecuación por una corriente de armadura
ai , se obtiene:
2aaaaC iRikiV 4.46
En la expresión anterior, es puede apreciar la potencia eléctrica suministrada
por la red, la potencia desarrollada por la armadura y las perdidas.
Si de la ecuación de velocidad de vacío se despeja el valor de voltaje cV y se
reemplaza en la ecuación4.46 se presenta:
20 aaaa iRikik
0aikP
P 4.47
En la expresión obtenida, se demuestra finalmente la dependencia directa
que tienen las perdidas de la armadura con respecto a los incrementos de
velocidad.
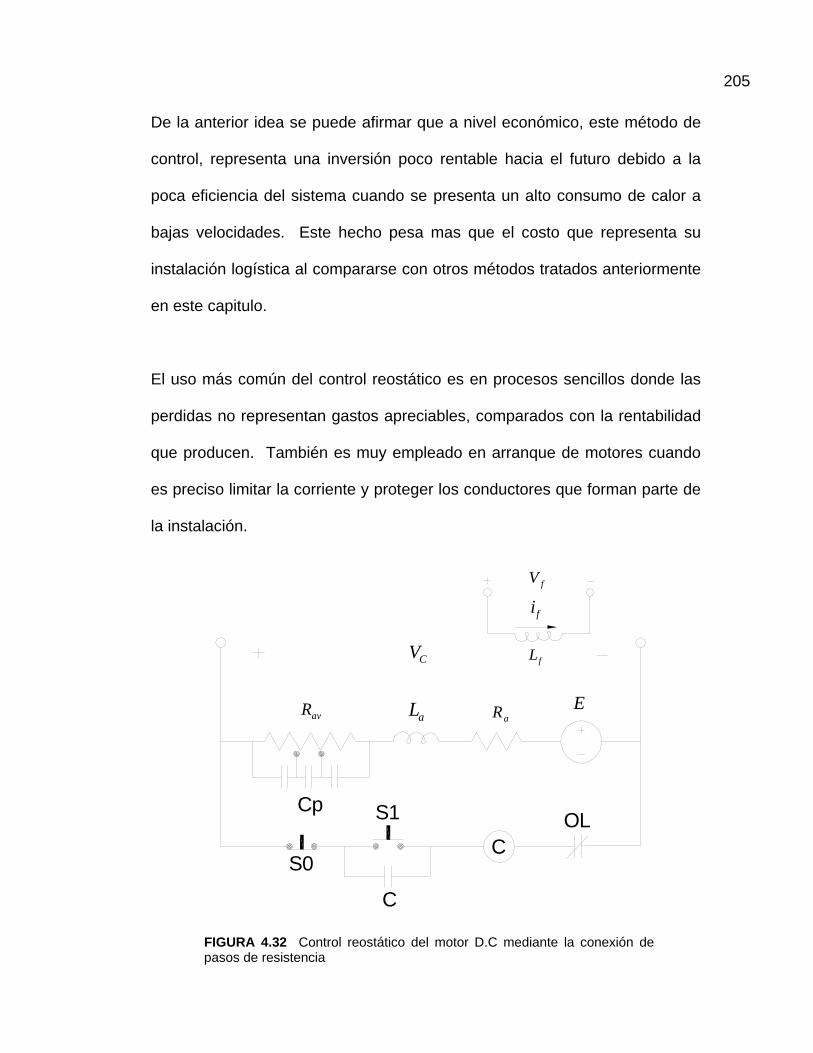
205
De la anterior idea se puede afirmar que a nivel económico, este método de
control, representa una inversión poco rentable hacia el futuro debido a la
poca eficiencia del sistema cuando se presenta un alto consumo de calor a
bajas velocidades. Este hecho pesa mas que el costo que representa su
instalación logística al compararse con otros métodos tratados anteriormente
en este capitulo.
El uso más común del control reostático es en procesos sencillos donde las
perdidas no representan gastos apreciables, comparados con la rentabilidad
que producen. También es muy empleado en arranque de motores cuando
es preciso limitar la corriente y proteger los conductores que forman parte de
la instalación.
CV
avR
fV
EaL
fi
C
C
OL
S0
S1
aR
Cp
fL
FIGURA 4.32 Control reostático del motor D.C mediante la conexión de pasos de resistencia
206
5. CONTROL DE VELOCIDAD DE LOS MOTORES DE INDUCCION
5.1 INTRODUCCION
Al propagarse la utilización de los motores de inducción debido a su tamaño,
economía y mantenimiento, los investigadores tuvieron la necesidad de
desarrollar una teoría donde se presentaran las premisas para controlar la
velocidad de estos motores.
El estudio de la máquina de inducción es complejo debido a la estructura
que posee. Para lograr la variación del torque y la velocidad en maquinas de
inducción con rotor tipo jaula de ardilla es necesario controlar parámetros de
estator como el voltaje, la corriente y la frecuencia. Esto implica un control
indirecto.
En maquinas de rotor devanado el acceso a sus parámetros es directo, lo
que significa que el control empleado tiene una respuesta rápida sin tener
que recurrir a modificar parámetros del estator.
207
La velocidad de rotación de un motor asincrónico se puede expresar de la
siguiente forma:
)1(2
)1( 1 Sp
fSsr
Esta ecuación presenta dos formas alternativas para controlar la velocidad
del motor de inducción, por medio de la variación del deslizamiento y por
variación de la frecuencia del campo magnético.
Para variar el deslizamiento se emplean los siguientes métodos:
Variación del voltaje de estator.
Variación de la resistencia efectiva y el voltaje del rotor.
También se puede nombrar los métodos de incremento de la resistencia del
rotor, la variación desbalanceada de voltaje de estator y variación de la
reactancia del motor, pero no serán parte del análisis de este texto por su
poca utilización. Los anteriores métodos incluidos los que no se estudiarán
representan grandes pérdidas del accionamiento, constituyéndose en
sistemas poco económicos, debido al gran deslizamiento que manejan.
La segunda forma para variar la velocidad de un motor asincrónico es la
variación de la frecuencia 1f del campo magnético del estator,
constituyéndose en el método más empleado en la actualidad. Otro de los
métodos que se considera económicos es el denominado variación de
velocidad por cascada asincrónica. Esta es una manera de variar el voltaje
208
del rotor empleando el deslizamiento de manera útil. Este junto con el
método de variación de la frecuencia constituyen los métodos más
económicos para controlar la velocidad en accionamientos.
5.2 VARIACION DEL VOLTAJE DEL ESTATOR
Como se mencionó en la introducción de este capítulo este método
pertenece al grupo de los no económicos, ya que se emplea en maquinas
que funcionan con gran deslizamiento. Como se vio en el capitulo 3, el
deslizamiento es proporcional a las perdidas de potencia activa en el rotor.
Por lo anterior se recomienda que el motor usado en esta aplicación sea de
clase D. Además la forma de la característica de este tipo de motor se presta
para variar la velocidad de rotación en la zona de régimen de trabajo
nominal.
El rendimiento de este método es bajo, esta condición puede analizarse en
la ecuación de potencia convertible.
Rrgconv PPP
RrIS
RrIPconv
22
22 33
)1(3 22 S
S
RrIPconv
)1( SPP gconv 5.1

209
Se debe mencionar que la potencia de entrehierro es la potencia de entrada
al rotor. La potencia convertida es la potencia de salida en el eje, con lo cual
el rendimiento se expresa de la siguiente forma:
g
conv
ent
sal
P
P
P
P
S
RrI
SS
RrI
22
22
3
)1(3
S 1 5.2
Donde se tiene que a mayor deslizamiento más bajo será el rendimiento.
De la ecuación 3.31 del capitulo 3, se observa la dependencia del torque con
el cuadrado del voltaje:
2
2
2
2
223
XXs
RRs
RU
THTHs
Th
Si se reduce el voltaje, el torque tendrá una disminución de la forma que se
aprecia en las curvas características de la figura 5.1.
Del capitulo 3, ecuación 3.38 el flujo se puede relacionar directamente con el
voltaje autoinducido generado por el flujo total de magnetización de la
maquina así:
mdevf fkNE 11 22
1

210
Reemplazando por una constante los valores que no se alteran:
devf kNK2
21
Donde:
fN es el numero de espiras por fase del devanado del estator y devk es un
parámetro de construcción del devanado del estator denominado factor de
devanado.
C
con diferentes tensiones
Curvas caracteristicas
de estator
1SmS 2S 3S1S 0S S
FIGURA 5.1 Características mecánicas del motor de inducción con variación del voltaje de estator.
211
Entonces:
11
1
fK
Em
Cuando la maquina trabaja en condiciones nominales en régimen
permanente2, se puede despreciar la caída de tensión en la resistencia y la
reactancia de los devanados del estator, con lo cual PVE 1 .
11 fK
VPm 5.2
Al disminuir el voltaje del estator se reduce el valor del flujo de
magnetización m y por tanto se reduce el torque motor. Para una carga
como la mostrada en la figura 5.1, se presenta una relación inversa entre el
torque y el deslizamiento.
En este proceso se presenta un aumento del deslizamiento como
consecuencia de la desaceleración que ocurre en el rotor, ya que el torque
resistente debe disminuir para equilibrar el torque motor. Esto sucede debido
a la ley de rotación:
dt
dj r
cm
Cuando se disminuye la velocidad del rotor, la velocidad relativa del campo
magnético sobre el rotor aumenta, haciendo que la corriente a través del
devanado del rotor aumente, presentándose un excesivo calentamiento en la
212
máquina. Por la razón anterior se acostumbra limitar la variación del voltaje a
un rango menor del 10% del voltaje nominal, ya que este fenómeno afectará
la vida útil del aislamiento de la máquina.
Al observar los puntos de trabajo a torque nominal conseguidos en cada
curva resultante con la variación de voltaje, se aprecia que la carga más ideal
para esta labor es una carga de tipo cuadrática como la tienen los
ventiladores y bombas, ya que su rango de variación de velocidad no es
necesariamente muy amplio y su torque de arranque es muy bajo.
Las desventajas del método de variación de velocidad al cambiar la tensión
de entrada al estator son:
Se disminuye la capacidad de sobrecarga del motor.
El rango de variación de la velocidad no es muy amplio. Desde 0S hasta
mSS .
Las perdidas del devanado del rotor se incrementan.
La configuración circuital mas utilizada para el control de voltaje es el
controlador de fase de C.A compuesta de tiristores. Estos semiconductores
controlan la forma de onda alterna de voltaje y corriente que llega al motor.
2 Este análisis no es aplicable a condiciones de régimen transitorio del motor como los que ocurren cuando se enciende la maquina.
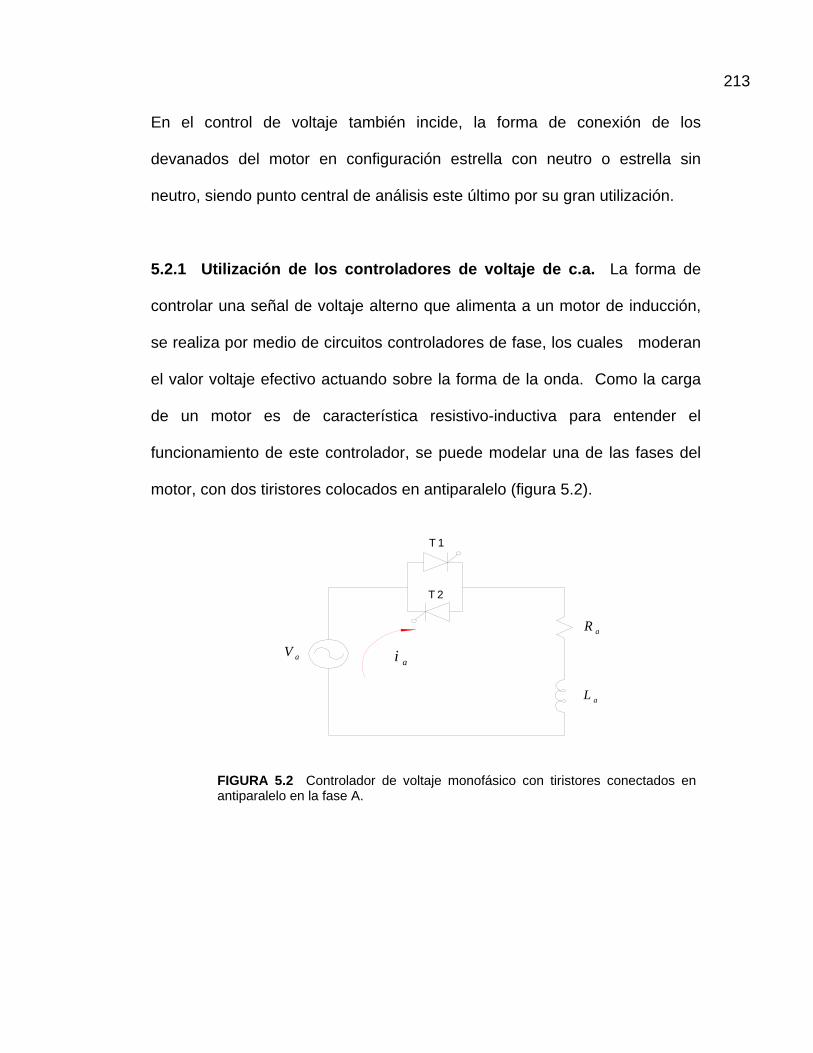
213
En el control de voltaje también incide, la forma de conexión de los
devanados del motor en configuración estrella con neutro o estrella sin
neutro, siendo punto central de análisis este último por su gran utilización.
5.2.1 Utilización de los controladores de voltaje de c.a. La forma de
controlar una señal de voltaje alterno que alimenta a un motor de inducción,
se realiza por medio de circuitos controladores de fase, los cuales moderan
el valor voltaje efectivo actuando sobre la forma de la onda. Como la carga
de un motor es de característica resistivo-inductiva para entender el
funcionamiento de este controlador, se puede modelar una de las fases del
motor, con dos tiristores colocados en antiparalelo (figura 5.2).
T 1
T 2
aR
aL
aVai
FIGURA 5.2 Controlador de voltaje monofásico con tiristores conectados en antiparalelo en la fase A.

214
Siendo aR y aL magnitudes de resistencias e inductancias son dependientes
del deslizamiento.
El voltaje aplicado a este circuito es de la forma:
tVV ma sen 5.3
Considerando ideal el comportamiento de los tiristores en conducción, es
decir sin la caída de tensión típica de los semiconductores, la ley de voltajes
aplicado al circuito de la figura 5.2 será:
dt
diLiRtV a
aaam sen 5.4
Aplicando a la ecuación diferencial 5.4 algún método de solución conocido,
por ejemplo el factor integrante, se obtiene la ecuación solución 5.5:
t
L
R
ma
a
a
AetZ
Vi
sen 5.5
Siendo 22aa LRZ y
a
a
R
LTan 1
Teniendo en cuenta en el circuito R-L las condiciones iniciales t e
0ai , se resuelve que la constante A es:
a
a
L
R
m eZ
VA sen 5.6
Reemplazando en la ecuación 5.5, el término de A:
t
L
R
ma
a
a
etZ
Vi sensen 5.7
215
Las curvas del voltaje de entrada, voltaje y corriente de salida se presenta en
la figura 5.3.
En la gráfica de corriente se puede apreciar que la corriente ai posee dos
componentes, una de régimen estable y otra de régimen transitorio.
21 aaa iii 5.8
Si llamamos el ángulo de conducción de los tiristores y el ángulo en que
termina la conducción medido desde el origen. Se puede obtener de la
ecuación solución 5.7, la ecuación trascendente donde se puede evaluar los
valores de los ángulos ,, y de manera iterativa.
a
a
L
R
e)sen()sen(
Al modelarse el motor de inducción por una carga de características resistivo-
inductiva, se presenta un ángulo de factor de potencia, el cual tiene
incidencia en la forma de la onda de corriente y en el control de los ángulos
de no-conducción de los tiristores. Con lo anterior es necesario analizar tres
casos importantes en la relación del ángulo de disparo de los tiristores con el
ángulo del factor de potencia.
Caso :
En esta condición la corriente esta conformada por una componente
periódica permanente desplazada respecto de la onda de tensión un ángulo
216
y por una señal aperiódica caracterizada por un valor exponencial que
decrece en el tiempo y tiene signo contrario al valor periódico.
Cuando el ángulo de retraso inicial oscila entre , se regula el
nivel de la corriente desde cero hasta su valor máximo. Por lo anterior se
puede designar el controlador como un regulador para la carga.
Caso :
La primera característica en un funcionamiento de este tipo es su
dependencia de la duración de los pulsos de cebado de los tiristores.
Cuando los tiristores funcionan con pulsos cortos, el tiristor T1 incrementa el
tiempo de conducción respecto al tiristor T2 debido a la temprana iniciación
de su periodo de conducción. La corriente en este caso tendrá un valor mas
alto debido a que sus componentes 1ai e 2ai tienen el mismo signo,
ocasionando que estas se sumen. Como la conducción de T1 se hace tan
extensa y los pulsos de cebado son tan cortos, cuando T2 reciba su pulso en
, este no podrá conducir debido a que este instante el tiristor T1 lo
polariza inversamente con una tensión anódica negativa.
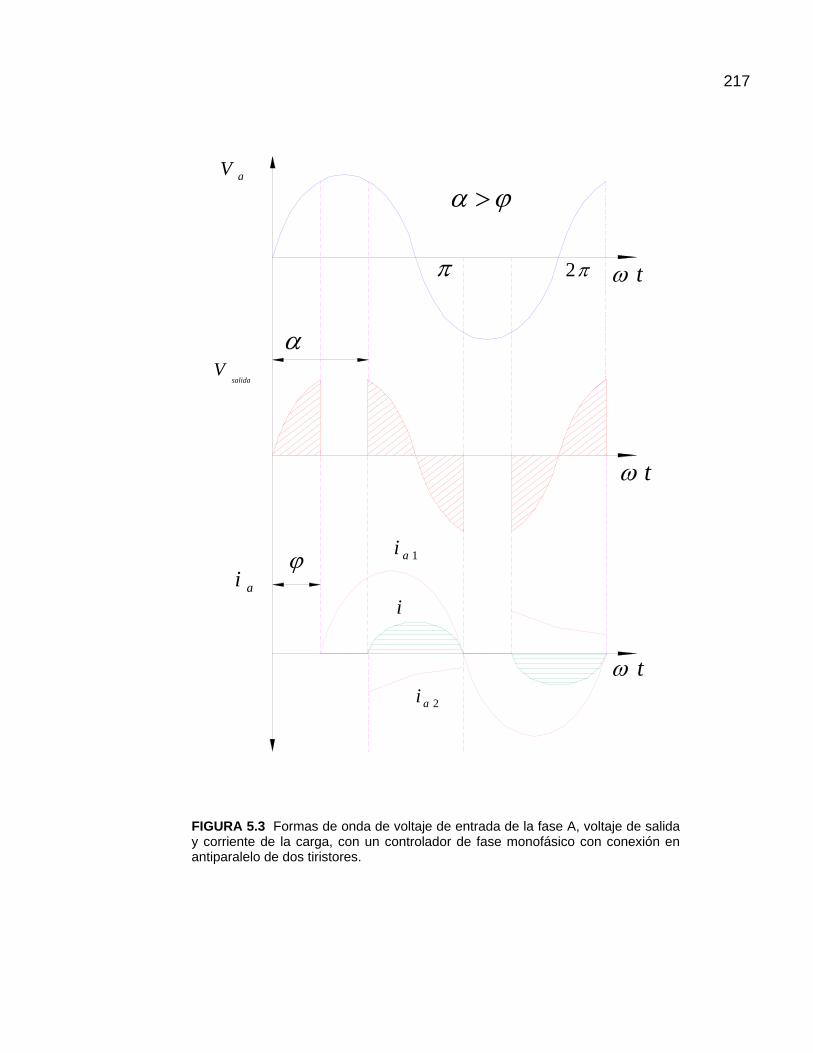
217
aV
salidaV
ai1ai
2ai
i
t
t
t
2
FIGURA 5.3 Formas de onda de voltaje de entrada de la fase A, voltaje de salida y corriente de la carga, con un controlador de fase monofásico con conexión en antiparalelo de dos tiristores.
218
Cuando los pulsos de los tiristores son largos, el pulso del tiristor T2 para el
caso anterior debe prolongarse entre y , de esta manera cuando
termine la conducción del T1, el voltaje anódico positivo del T2 hará que este
conduzca. En este caso los tiristores trabajaran de forma enlazada,
ocasionando que al terminar la conducción de T1 se inicie la conducción de
T2, motivo por el cual no existirán espacios donde la corriente por la carga
sea cero.
La señal aperiódica será de forma continua pero al transcurrir el tiempo será
igual a cero. Con lo anterior la señal de corriente se asemejará a la señal
periódica mermando su valor máximo.
Caso :
En este caso la señal corriente carece de componente aperiódica y es de tipo
senoidal con una frecuencia t. De este modo los tiristores no ejercen
ningún tipo de control sobre la señal de voltaje de entrada como interruptor,
ni como regulador. Esto se asemeja a conectar el motor directamente a la
fuente.
5.2.2 Controlador trifásico bidireccional. En los sistemas trifásicos se
acostumbra el empleo del controlador trifásico bidireccional o de onda
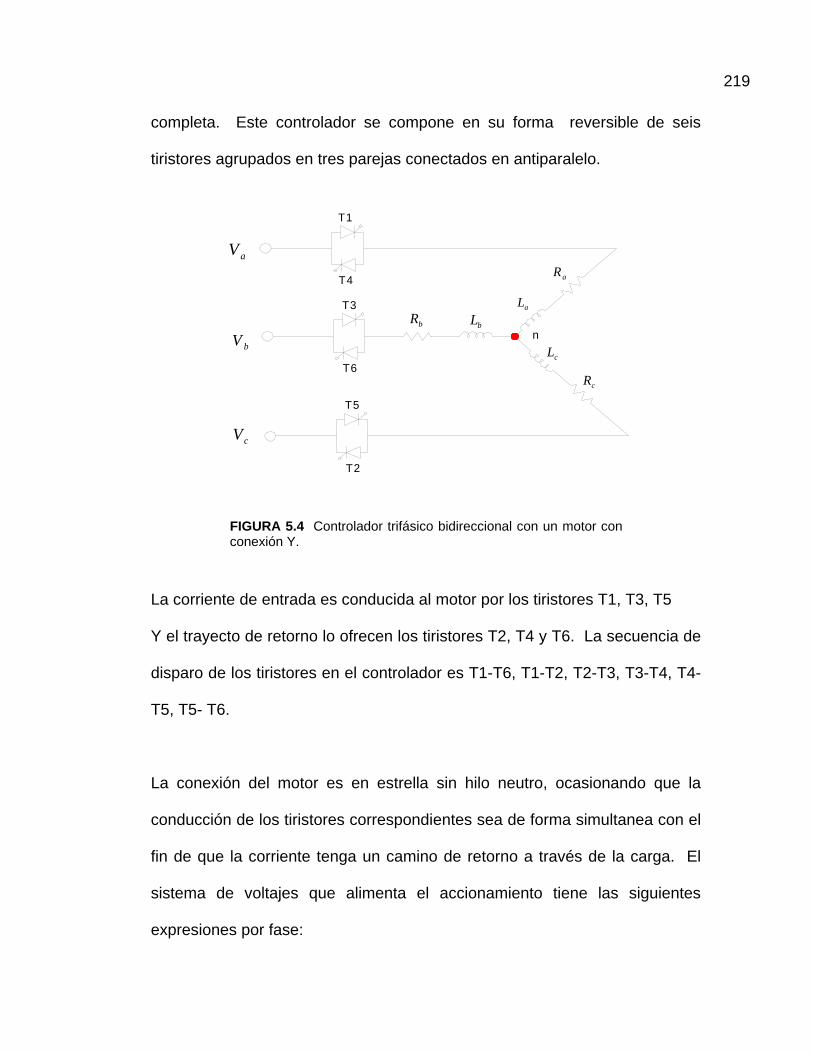
219
completa. Este controlador se compone en su forma reversible de seis
tiristores agrupados en tres parejas conectados en antiparalelo.
La corriente de entrada es conducida al motor por los tiristores T1, T3, T5
Y el trayecto de retorno lo ofrecen los tiristores T2, T4 y T6. La secuencia de
disparo de los tiristores en el controlador es T1-T6, T1-T2, T2-T3, T3-T4, T4-
T5, T5- T6.
La conexión del motor es en estrella sin hilo neutro, ocasionando que la
conducción de los tiristores correspondientes sea de forma simultanea con el
fin de que la corriente tenga un camino de retorno a través de la carga. El
sistema de voltajes que alimenta el accionamiento tiene las siguientes
expresiones por fase:
aL
aR
bRbL
cL
cR
aV
bV
cV
T1
T2
T4
T3
T6
T5
n
FIGURA 5.4 Controlador trifásico bidireccional con un motor con conexión Y.

220
tVV mA sen2 5.9a
3
2sen2
tVV mB 5.9b
3
4sen2
tVV mC 5.9c
Los voltajes línea – línea del sistema son:
6sen6
tVV mAB 5.10a
2sen6
tVV mBC 5.10b
6
7sen6
tVV mCA 5.10c
La forma de onda del voltaje aplicado al motor depende de los ángulos y
. En la figura 5.5 se presenta la forma de onda de los voltajes de entrada,
voltaje de salida y rangos de conducción con ángulos de retraso 45 y
120 , analizándose el comportamiento en la fase A del motor , siendo
similar el estudio para las otras fases.
En la figura 5.5b con un ángulo 45 se aprecia que existen seis sectores
que componen la onda de voltaje de salida, donde en tres sectores el voltaje
es igual al voltaje de fase aV , en dos sectores el voltaje en la carga es la
mitad del voltaje de línea y existe un sector donde el voltaje en la carga es
igual a cero.
221
En cada parte de la onda se puede obtener valores de voltaje y corriente
aplicando la ecuación diferencial 5.4, reemplazando en cada sector el valor
correspondiente al voltaje de fase o a la mitad del voltaje de línea.
La expresión de la corriente generalizada a partir de la ecuación 5.4 se
puede expresar de la siguiente forma:
tan
t
mnn
n
AetZ
VCi
sen
Siendo:
n
mnn Z
VCiA sen1
2
3,2:nC
:n numero del sector.
:n valor inicial del sector.
0,6
,6
:
: factor de potencia.
En la figura 5.5 el voltaje en la carga tiene sectores donde su valor solo es la
mitad del voltaje de línea y en otros sectores no hay voltaje.
La implementación de estos controladores permite concluir que la forma del
voltaje aplicado al motor tiene una forma no senoidal y la corriente que este

222
entrega es discontinua. Esto implica un alto contenido de armónicos de
estas ondas, siendo necesario recurrir a un análisis de Fourier para encontrar
las funciones de los armonios más importantes.
2
0 00
1tdtVa 5.12
La anterior expresión representa el nivel promedio de la función que se esta
evaluando. En este caso tV 0
2
0 0 cos1
tdtnVan 5.12b
2
0 0 sen1
tdtnVbn 5.12c
El voltaje de salida para una función periódica.
n
n tCa
tV sen2
00 5.13
Donde la constante:
21
22nnn baC
Como la forma de las ondas de voltaje obtenidas tienen simetría de media
onda con respecto al eje de las abscisas, estas crecen de armónicos pares
0na y su valor promedio es nulo 00 a .
Por las razones expresadas en el párrafo anterior los cálculos con las
ecuaciones de fourier se facilitan, además con la conexión estrella sin neutro
las corrientes de tercer armónico no circulan por el motor reduciéndose aun
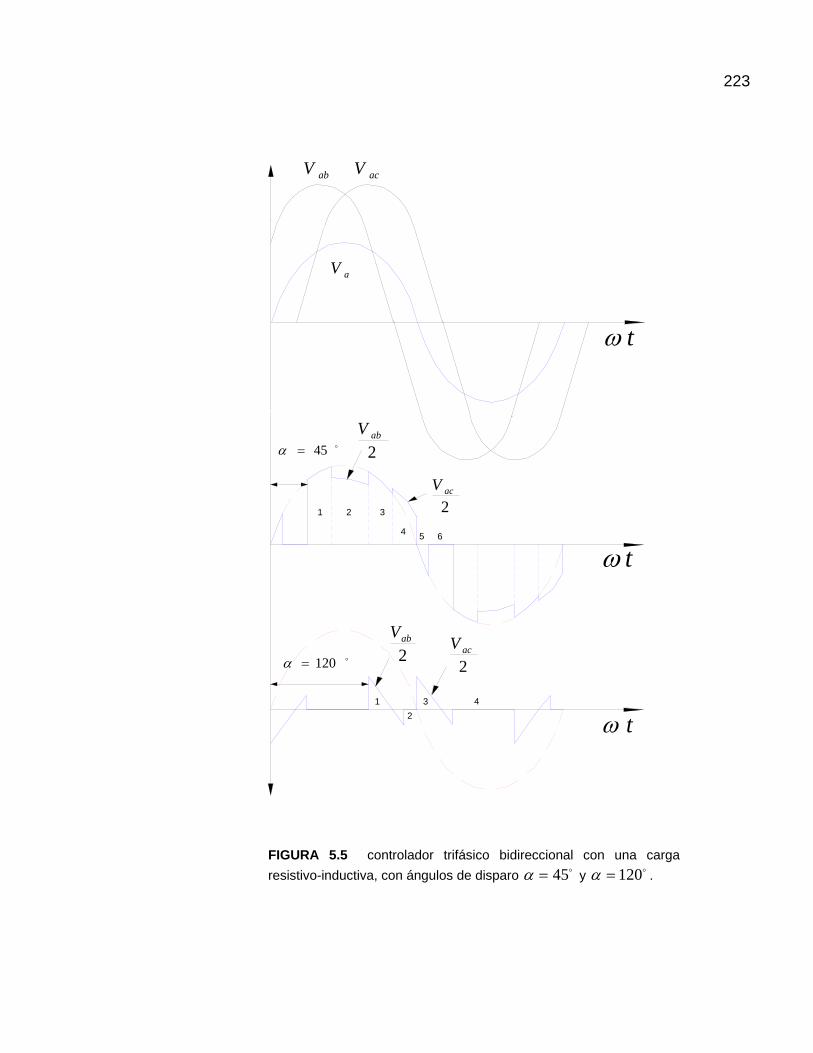
223
21
431
2
654
3
aV
abV acV
2abV
2acV
45
120 2abV
2acV
t
t
t
FIGURA 5.5 controlador trifásico bidireccional con una carga
resistivo-inductiva, con ángulos de disparo 45 y 120 .
224
más los valores de corriente para encontrar.
Por ultimo debido a estudios realizados se ha concluido que los armónicos
superiores no tienen una gran incidencia en el trabajo del motor, debido a
que los toques que se producen oscilan entre valores de 0.8-1.5 % del torque
máximo. Lo anterior conlleva a considerar solamente el primer armónico de
voltaje para un análisis del accionamiento con un pequeño margen de error.
Los cálculos son hechos en valores por unidad, tomando como valor base el
voltaje efectivo del voltaje de salida y considerando el voltaje efectivo de
primer armónico.
2'1
2'1
0
1
0
11 ba
V
C
V
V
EFEf
EF
Donde las constantes tienen los siguientes valores:
EFV
aa
0
1'1 y
EFV
bb
0
1'1
5.2.3 Construcción de características mecánicas y de frenado. Al
obtener mediante diversos y complejos cálculos, la expresión de voltaje de
salida con sus componentes armónicos. Se puede concluir que el torque
desarrollado por el motor esta conformado por diferentes armónicos de
torque, con un sentido de giro correspondiente al campo del armónico de
voltaje que la produce:
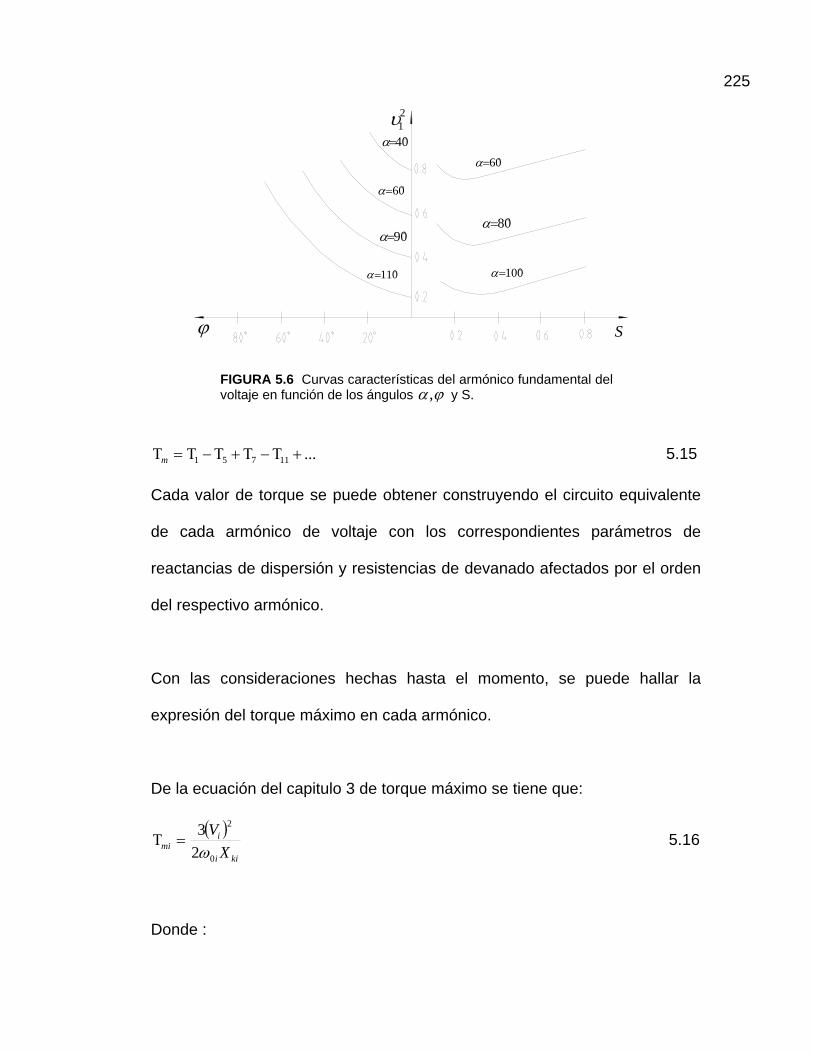
225
...11751 m 5.15
Cada valor de torque se puede obtener construyendo el circuito equivalente
de cada armónico de voltaje con los correspondientes parámetros de
reactancias de dispersión y resistencias de devanado afectados por el orden
del respectivo armónico.
Con las consideraciones hechas hasta el momento, se puede hallar la
expresión del torque máximo en cada armónico.
De la ecuación del capitulo 3 de torque máximo se tiene que:
kii
imi X
V
0
2
2
3
5.16
Donde :
2140
60
90
110
100
80
60
S
FIGURA 5.6 Curvas características del armónico fundamental del voltaje en función de los ángulos , y S.
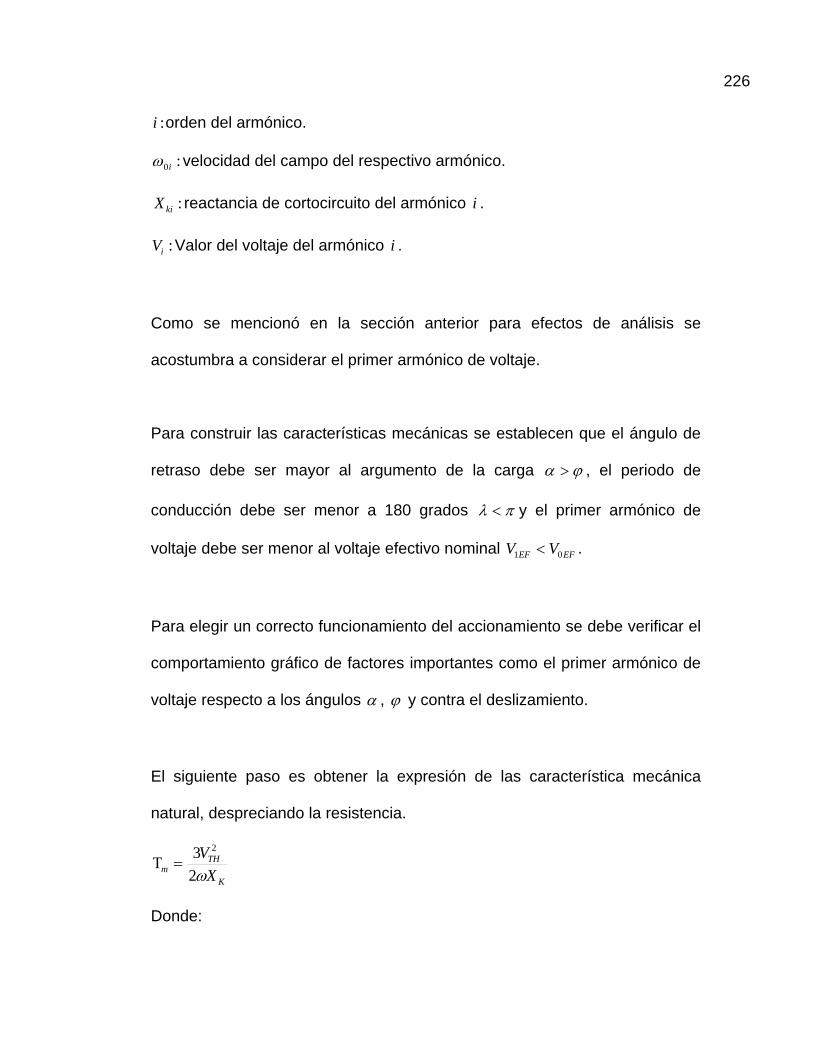
226
:i orden del armónico.
:0i velocidad del campo del respectivo armónico.
:kiX reactancia de cortocircuito del armónico i .
:iV Valor del voltaje del armónico i .
Como se mencionó en la sección anterior para efectos de análisis se
acostumbra a considerar el primer armónico de voltaje.
Para construir las características mecánicas se establecen que el ángulo de
retraso debe ser mayor al argumento de la carga , el periodo de
conducción debe ser menor a 180 grados y el primer armónico de
voltaje debe ser menor al voltaje efectivo nominal EFEF VV 01 .
Para elegir un correcto funcionamiento del accionamiento se debe verificar el
comportamiento gráfico de factores importantes como el primer armónico de
voltaje respecto a los ángulos , y contra el deslizamiento.
El siguiente paso es obtener la expresión de las característica mecánica
natural, despreciando la resistencia.
K
THm X
V
23 2
Donde:
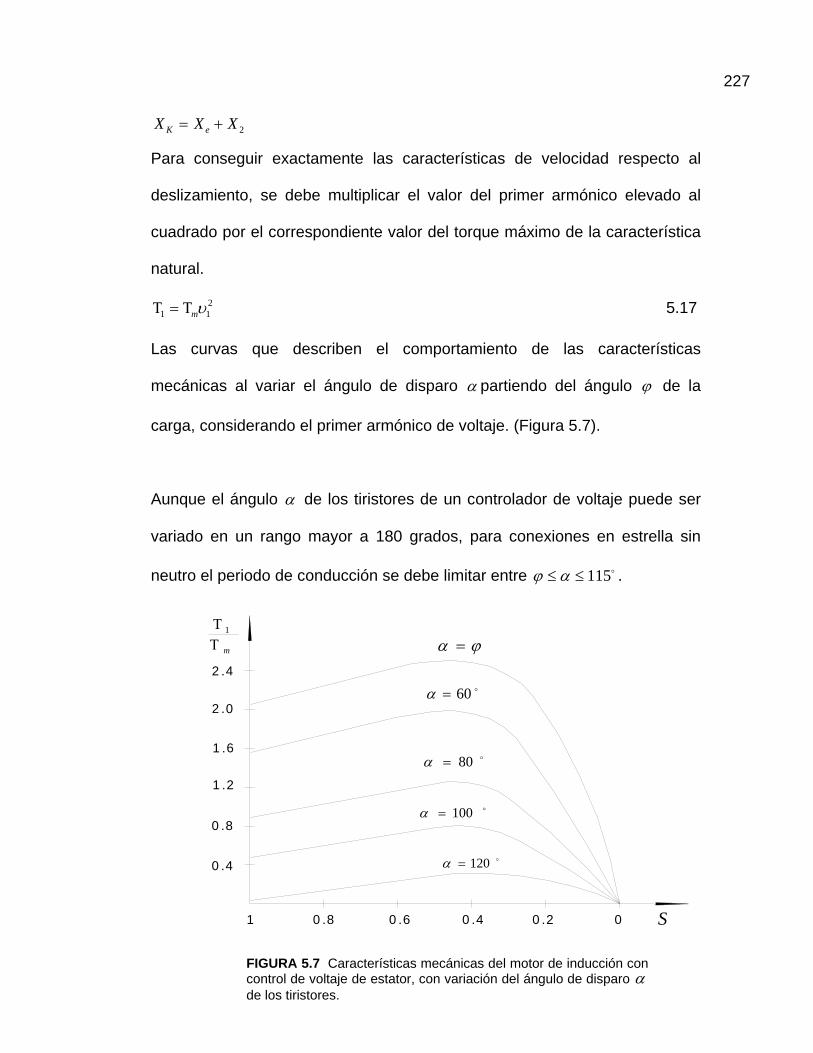
227
2XXX eK
Para conseguir exactamente las características de velocidad respecto al
deslizamiento, se debe multiplicar el valor del primer armónico elevado al
cuadrado por el correspondiente valor del torque máximo de la característica
natural.
211 m 5.17
Las curvas que describen el comportamiento de las características
mecánicas al variar el ángulo de disparo partiendo del ángulo de la
carga, considerando el primer armónico de voltaje. (Figura 5.7).
Aunque el ángulo de los tiristores de un controlador de voltaje puede ser
variado en un rango mayor a 180 grados, para conexiones en estrella sin
neutro el periodo de conducción se debe limitar entre 115 .
m 1
S
100
60
80
120
00 .20 .40 .60 .81
2 .4
2 .0
1 .6
1 .2
0 .8
0 .4
FIGURA 5.7 Características mecánicas del motor de inducción con control de voltaje de estator, con variación del ángulo de disparo de los tiristores.
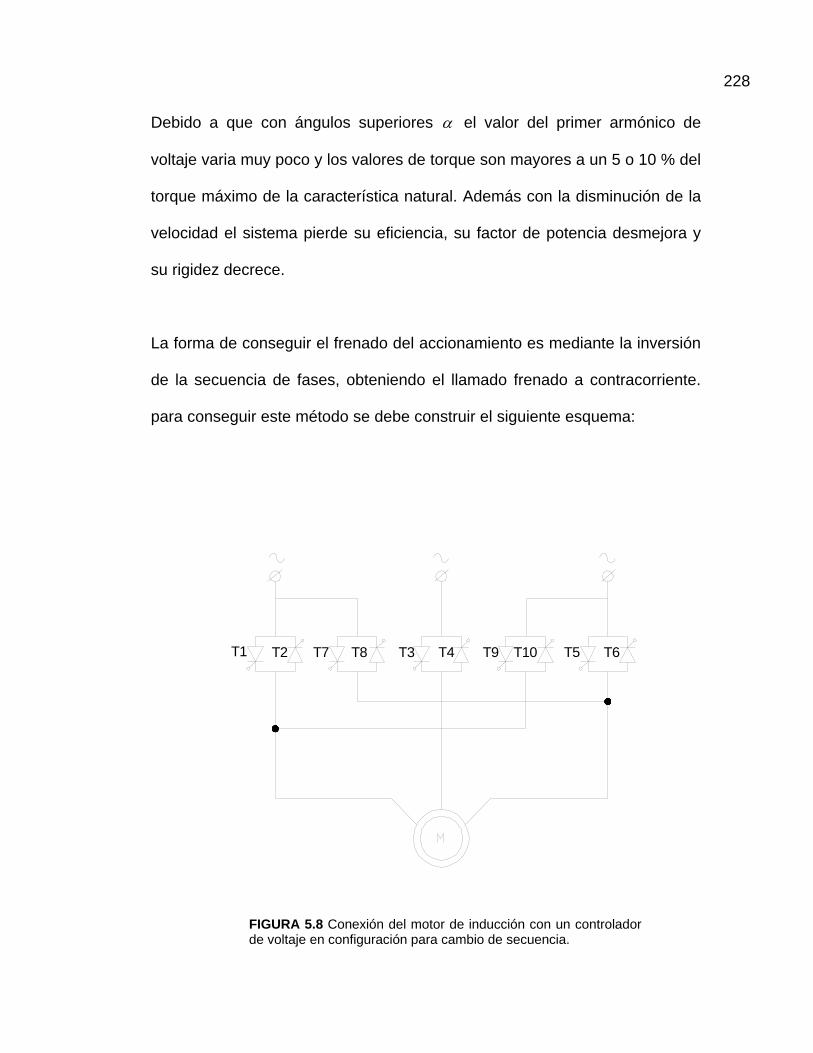
228
Debido a que con ángulos superiores el valor del primer armónico de
voltaje varia muy poco y los valores de torque son mayores a un 5 o 10 % del
torque máximo de la característica natural. Además con la disminución de la
velocidad el sistema pierde su eficiencia, su factor de potencia desmejora y
su rigidez decrece.
La forma de conseguir el frenado del accionamiento es mediante la inversión
de la secuencia de fases, obteniendo el llamado frenado a contracorriente.
para conseguir este método se debe construir el siguiente esquema:
T1 T2 T3 T4 T9 T10 T6T5T8T7
FIGURA 5.8 Conexión del motor de inducción con un controlador de voltaje en configuración para cambio de secuencia.
229
La corriente obtenida en este proceso es alta pero es compensada por la
gran resistencia del motor clase D, que es el tipo de motor ideal par este
control de velocidad.
En algunas aplicaciones se emplea la configuración de la figura 5.8 para
arrancar a corriente reducida y luego desconectando el convertidor a una
velocidad nominal o de régimen.
5.3 VARIACION DE LA FRECUENCIA
La regulación de la velocidad por medio del método de variación del voltaje
de estator, presenta unas características mecánicas que varían de forma
concurrente en el punto de velocidad nominal al variar la tensión del estator,
esto indica el alto deslizamiento que origina unas grandes perdidas en la
maquina. Este hecho se trato en la sección anterior.
Lo anterior permite enunciar que una buena regulación de la velocidad se
consigue cuando las características mecánicas se pueden desplazar de
forma paralela hacia el origen, esto se consigue a deslizamiento constante,
con una modificación de la frecuencia de alimentación al motor de inducción.
En una buena regulación de la velocidad interesa desarrollar un torque motor
elevado que absorba una cantidad menor de corriente de la red representado
230
en el circuito equivalente del motor como '21 II . Esta idea se consigue al
mantener constante el flujo magnético resultante R que atraviesa el
entrehierro, sin recurrir a una corriente magnetizante mI excesiva, trabajando
la maquina cerca a la saturación.
La dependencia de la velocidad sincrónica del campo magnético del motor de
la frecuencia 1f , se aprecia mediante la ecuación fundamental:
p
fS
12
En el capítulo 3 se realizó un análisis electromagnético donde mediante las
ecuaciones 3.39, 3.40, 3.41 se concluía la importancia que representa para el
control del motor el mantenimiento del flujo magnético constante, ya que este
permite un proceso con torque constante. Para cumplir con este objetivo se
debe modificar el valor de la frecuencia de forma proporcional al voltaje.
Para profundizar más en el tema se hará una consideración detallada,
partiendo del circuito equivalente del motor representado en la figura 3.1,
aquí se despreciará el efecto de las resistencias mR , meR y '2R y solo se
tendrá presente la reactancia de magnetización.
Analizando por medio de la ley de voltajes el circuito del estator:
1111 EZIV 5.18

231
Siendo:
mfKE 111 44.4
'21 III m
11 NkK dev
Reemplazando en la ecuación 5.18 la expresión queda:
1'2111 44.4 ZIIfKV mm 5.19
Despejando el flujo magnético se obtiene:
11
1'21
44,4
)(
fK
ZIIV mm
Para la condición de vacío se puede obtener el flujo de vacío, con la corriente
0'2 I y despreciando caída tensión del estator ocasionada por la corriente
magnetizante mI :
1R 1X
1V 1E
1Imo II
mX '2SE
'2I
'2X
1
1'2
'
SRRV
FIGURA 5.9 Circuito equivalente del motor de inducción, las resistencias de la rama de magnetización y del rotor son despreciadas.
232
11
10 44,4 fK
Vm 5.20
Con lo cual se obtiene una ecuación más representativa para el flujo
magnético que la obtenida en el capitulo 3.
1
120 44,4
)(Im
KTf
ZImm
5.21
De aquí se puede corroborar las conclusiones que se habían obtenido en el
capítulo 3 junto con las ecuaciones 5.19, 5.20 y 5.21:
Con la ecuación 5.19 si se desprecia la caída tensión en la impedancia de
estator se puede enunciar lo dicho en la ecuación 5.47 que el flujo magnético
permanece invariable para todas las frecuencias, al variar proporcionalmente
la amplitud del voltaje con la frecuencia llamándose también a este método
relación HertzVolt .
Si se considera la caída tensión en la impedancia del estator, se observa que
a bajas frecuencias, el flujo decae, por lo cual se debe incrementar el voltaje
para sostener el flujo constante. ( Este método se llama aplicación del voltaje
boost ).
La velocidad depende en forma directa de la frecuencia f1.
Existe una forma alternativa de mantener el flujo constante evitando
disminuciones a bajas frecuencias, y es manteniendo la corriente de estator
constante. En este tema se profundizará en una sección aparte.

233
5.3.1 Ley de variación de la frecuencia y el voltaje. Para un motor de
inducción la expresión que describe el torque máximo está dada en la
ecuación 3.33:
22
211
21
2
3
XXRR
V
THs
max
Si 2XXX THK y se desprecia la resistencia del estator 1R :
Ksmax X
V
21
2
3 5.22
El mantenimiento del flujo constante de forma precisa requiere que aparte de
la relación voltaje-frecuencia, también se relacione el tipo de carga que se
instale en el eje del motor.
El conocimiento del tipo de carga permite conservar la capacidad de
sobrecarga del motor de inducción, al establecer una relación directa con el
torque motor de la siguiente forma:
CteC
m
Si en la ecuación 5.43 se aproximan 1fs , 1fX K y KXA2
3 la
ecuación del torque máximo se convierte:
21
fi
VAmax 5.23
234
Con esta ecuación y dividiéndola entre C torque de carga, se obtiene:
Cfi
VAC
2
21 C : torque de carga
Esta relación permite comparar la capacidad de sobrecarga a valores
nominales, con diferentes valores de voltaje.
N
C
N
y
N
y
f
f
V
V
5.24
Los valores con subíndice y indican que suceden a frecuencias distintas a la
nominal. Esta ecuación se puede presentar en valores por unidad.
'''CfV 5.25
La ecuación 5.46 obtenida representa la ley de variación de la frecuencia y el
voltaje, describiendo exactamente el comportamiento entre el voltaje, la
frecuencia y el tipo de carga.
En el capítulo 1 se apreciaban los diferentes tipos de carga que se resumen
en tres tipos principales:
Característica independiente de la velocidad.
Característica de dependencia descendente de la velocidad.
Característica con dependencia no lineal de la velocidad.
Este tipo de cargas se rigen por la ecuación 1.9.
235
X
NresnC
00'
Cada carga tiene un comportamiento especial del exponente x.
5.3.2 Variación con carga independiente de la velocidad. La ecuación
1.9 se puede expresar en valores por unidad '1
' f .
'1
'0
'0
' 1 fC 5.26
Para el tipo de cargas invariables a la velocidad X = 0, es decir con torques
de cargas constantes, la ecuación de la ley de variación de frecuencia y
voltaje queda:
0'
1' fV 5.27
Como el torque es constante 1C y con ello:
Ctef
V
'1
'
Para carga constante la variación del voltaje será proporcional a la
frecuencia. Si el motor trabaja con un deslizamiento pequeño se conseguirá
una relación directa entre el torque motor con la corriente del rotor,
estableciéndose una doble condición:
Ctef 2 y Ctem
Con estos parámetros constantes la corriente de rotor se vuelve constante:
236
2'
2
212
2'2
2'2
212'
2R
VS
XS
R
VI
Si el deslizamiento 1
2
f
fS y
1
1
f
V la corriente de rotor se expresará:
'2
2'2 R
fI
Con la expresión anterior la ecuación del capitulo 3 al tener un factor de
potencia cercano a uno al trabajar la maquina en bajo deslizamiento, se
corrobora la obtención de un torque constante.
Cuando se alcanzan estas condiciones con un torque de carga constante el
calentamiento del motor será igual en todas las velocidades.
5.3.3 Variación con carga de dependencia descendente de la velocidad.
Con este tipo de carga el torque decrece con la velocidad, aquí el exponente
1X y 00 .
'
1''
1ffV
ctef
V
'
' 5.28
Con cargas de este tipo, la variación del voltaje debe ser proporcional a la
raíz cuadrada de la frecuencia.
237
5.3.4 Variación de carga con dependencia no lineal creciente de la
velocidad. Este tipo de cargas son llamadas cuadraticas o tipo ventilador,
donde el torque varía con el cuadrado de la velocidad, aquí 2x y 00 .
21'' ffV
ctef
V2
1
' 5.29
La variación del voltaje será proporcional al cuadrado de la frecuencia.
Para estas tres variaciones en la figura 5.22 se presentan sus características
mecánicas. Las figuras 5.22 a y 5.22 b reciben los nombres de zona de par
constante y zona de potencia constante respectivamente teniendo como
referencia el comportamiento de la carga en el eje.
5.3.5 Funcionamiento de los onduladores. En la electrónica de potencia
existen dos circuitos básicos mediante los cuales se entrega una señal de
tensión y frecuencia variable, los cuales son los cicloconvertidores y los
onduladores. En este texto solo se hará referencia de los últimos por ser los
mas empleados en la actualidad.
5.3.5.1 Principio de los onduladores. El principio sobre el cual funcionan
los onduladores se explicará en este apartado con un circuito monofásico en
medio puente (Figura. 5.10).
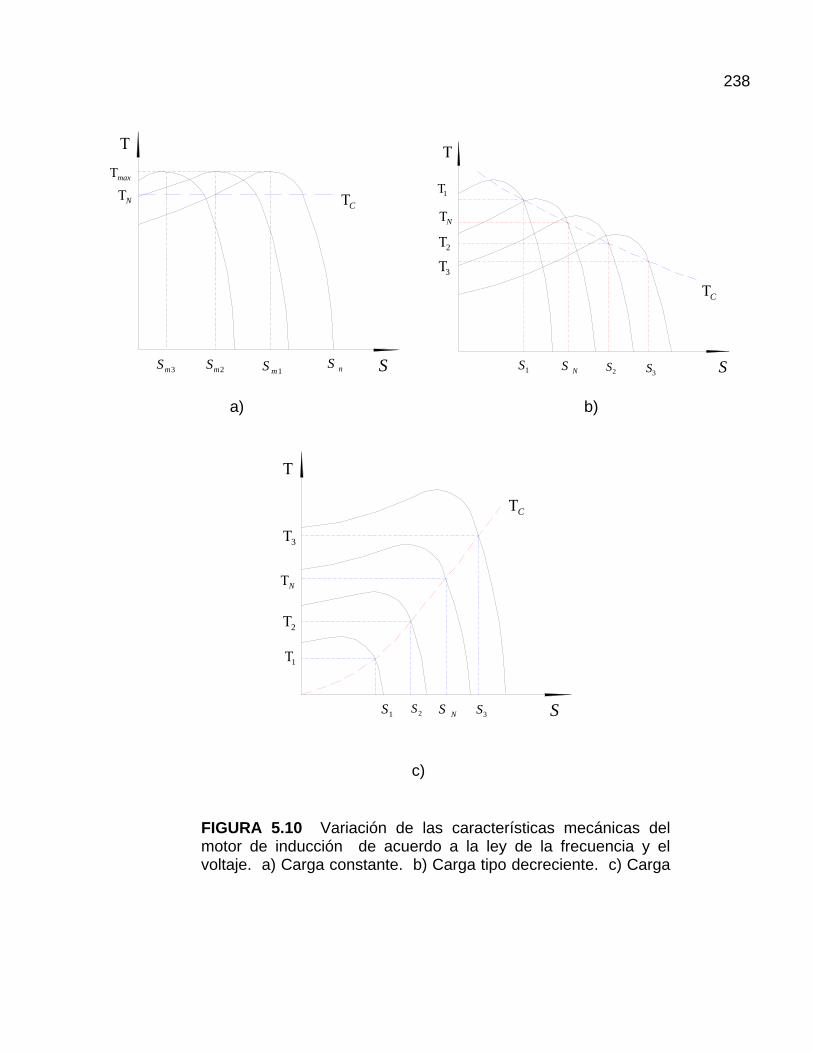
238
SnS1mS2mS3mS
max
NC
SNS1S
1
N
2S3S
2
3
C
SNS1S
N
2
3
2S3S
1
C
a) b)
c)
FIGURA 5.10 Variación de las características mecánicas del motor de inducción de acuerdo a la ley de la frecuencia y el voltaje. a) Carga constante. b) Carga tipo decreciente. c) Carga
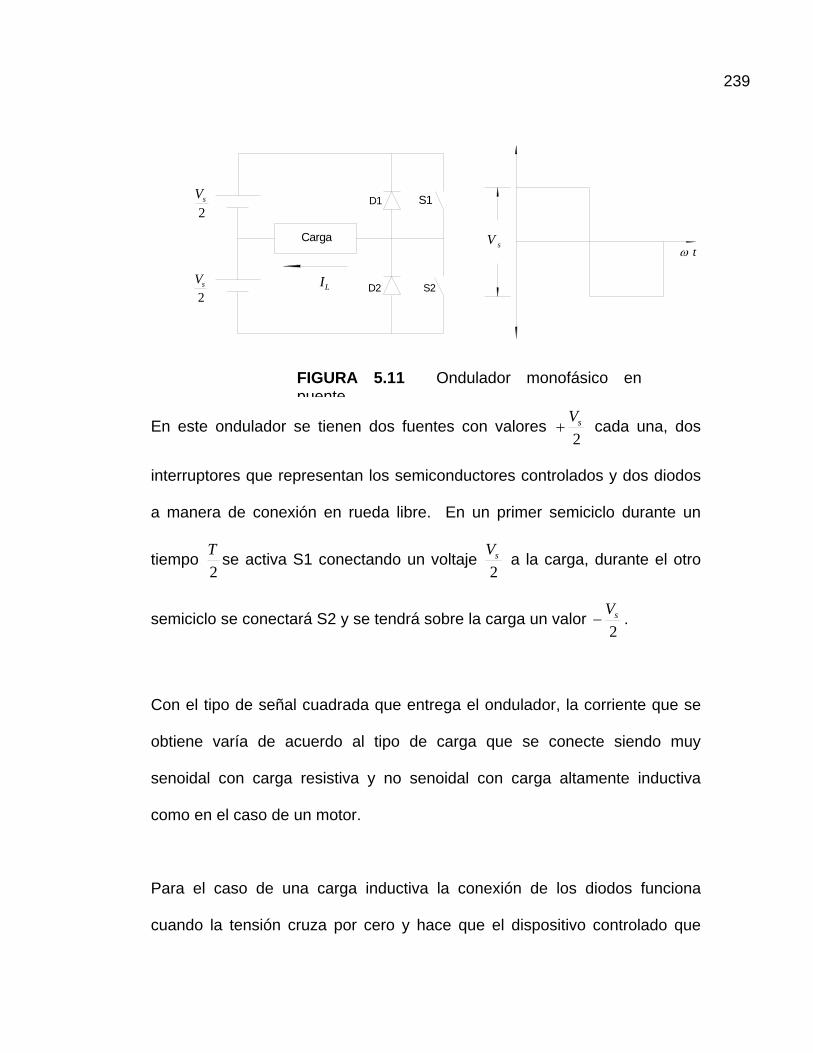
239
En este ondulador se tienen dos fuentes con valores 2
sV cada una, dos
interruptores que representan los semiconductores controlados y dos diodos
a manera de conexión en rueda libre. En un primer semiciclo durante un
tiempo 2
Tse activa S1 conectando un voltaje
2sV
a la carga, durante el otro
semiciclo se conectará S2 y se tendrá sobre la carga un valor 2
sV .
Con el tipo de señal cuadrada que entrega el ondulador, la corriente que se
obtiene varía de acuerdo al tipo de carga que se conecte siendo muy
senoidal con carga resistiva y no senoidal con carga altamente inductiva
como en el caso de un motor.
Para el caso de una carga inductiva la conexión de los diodos funciona
cuando la tensión cruza por cero y hace que el dispositivo controlado que
S1D1
S2D2
Carga
2sV
2sV
LI
sVt
FIGURA 5.11 Ondulador monofásico en puente
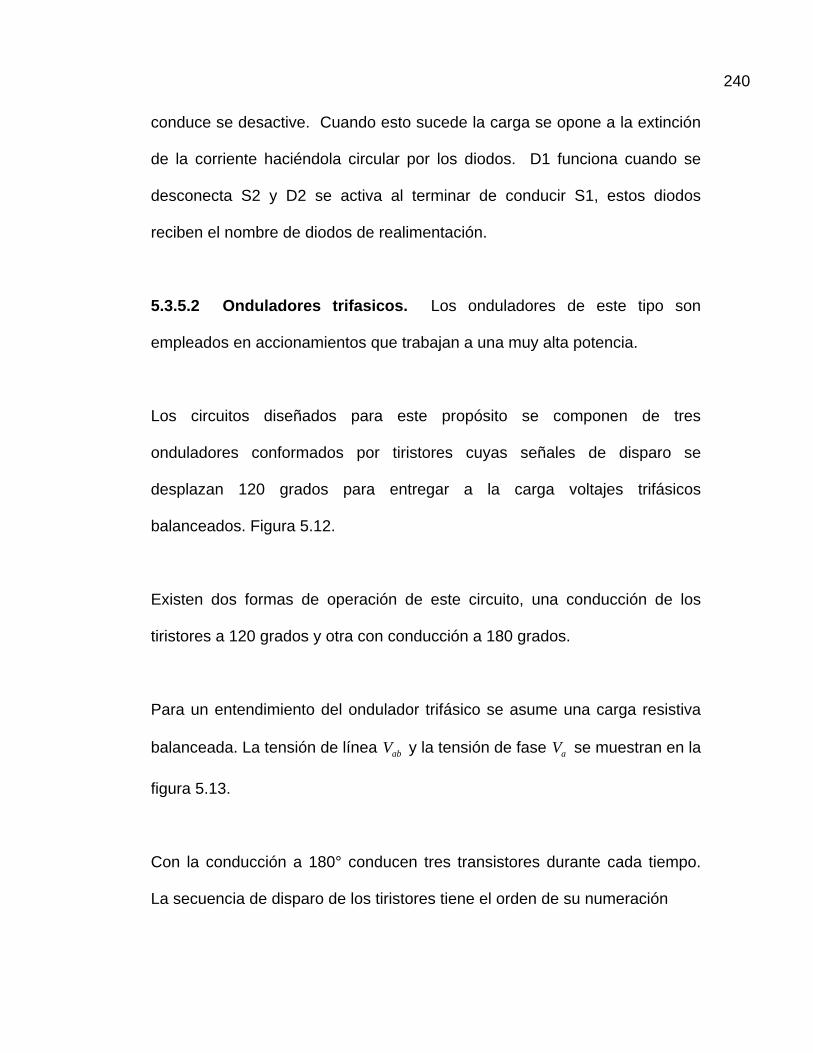
240
conduce se desactive. Cuando esto sucede la carga se opone a la extinción
de la corriente haciéndola circular por los diodos. D1 funciona cuando se
desconecta S2 y D2 se activa al terminar de conducir S1, estos diodos
reciben el nombre de diodos de realimentación.
5.3.5.2 Onduladores trifasicos. Los onduladores de este tipo son
empleados en accionamientos que trabajan a una muy alta potencia.
Los circuitos diseñados para este propósito se componen de tres
onduladores conformados por tiristores cuyas señales de disparo se
desplazan 120 grados para entregar a la carga voltajes trifásicos
balanceados. Figura 5.12.
Existen dos formas de operación de este circuito, una conducción de los
tiristores a 120 grados y otra con conducción a 180 grados.
Para un entendimiento del ondulador trifásico se asume una carga resistiva
balanceada. La tensión de línea abV y la tensión de fase aV se muestran en la
figura 5.13.
Con la conducción a 180° conducen tres transistores durante cada tiempo.
La secuencia de disparo de los tiristores tiene el orden de su numeración

241
123, 234, 345, 456, 561.
Se puede observar para la fase A, la operación en un semiperiodo
comprendido entre 0 y . Cuando transcurre el tiempo entre 0 y 3
conducen los tiristores T1, T2 , T3, conectando las fases A y C a un potencial
dV y la fase B a un potencial dV , lo cual se aprecia en la figura. Figura.
La corriente y la resistencia total en este circuito serán:
R
V
R
VI d
T
dL 3
2 y
2
3RRt
La tensión en la fase A será:
32
3*
3
2 dda
VR
R
VV
D5T5D1 D3T3T1
T6D4
a
T4 D2T2D6
b
M
c
sV
FIGURA 5.12 Ondulador trifásico conectado a un motor de inducción.
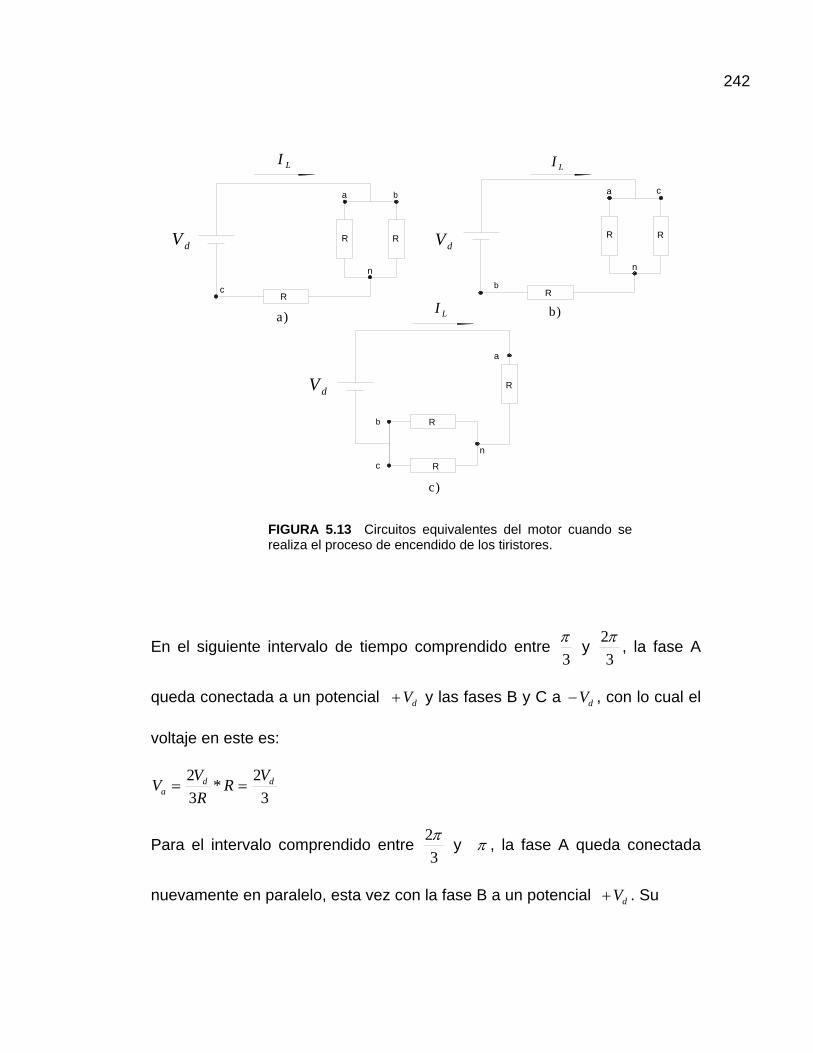
242
En el siguiente intervalo de tiempo comprendido entre 3
y
3
2, la fase A
queda conectada a un potencial dV y las fases B y C a dV , con lo cual el
voltaje en este es:
3
2*
3
2 dda
VR
R
VV
Para el intervalo comprendido entre 3
2 y , la fase A queda conectada
nuevamente en paralelo, esta vez con la fase B a un potencial dV . Su
c
R R
b
c
a)
R
n
ba
c)
R
RR
n
R
a
R
R
b)
b
n
ca
LI
LI
LI
dV dV
dV
FIGURA 5.13 Circuitos equivalentes del motor cuando se realiza el proceso de encendido de los tiristores.
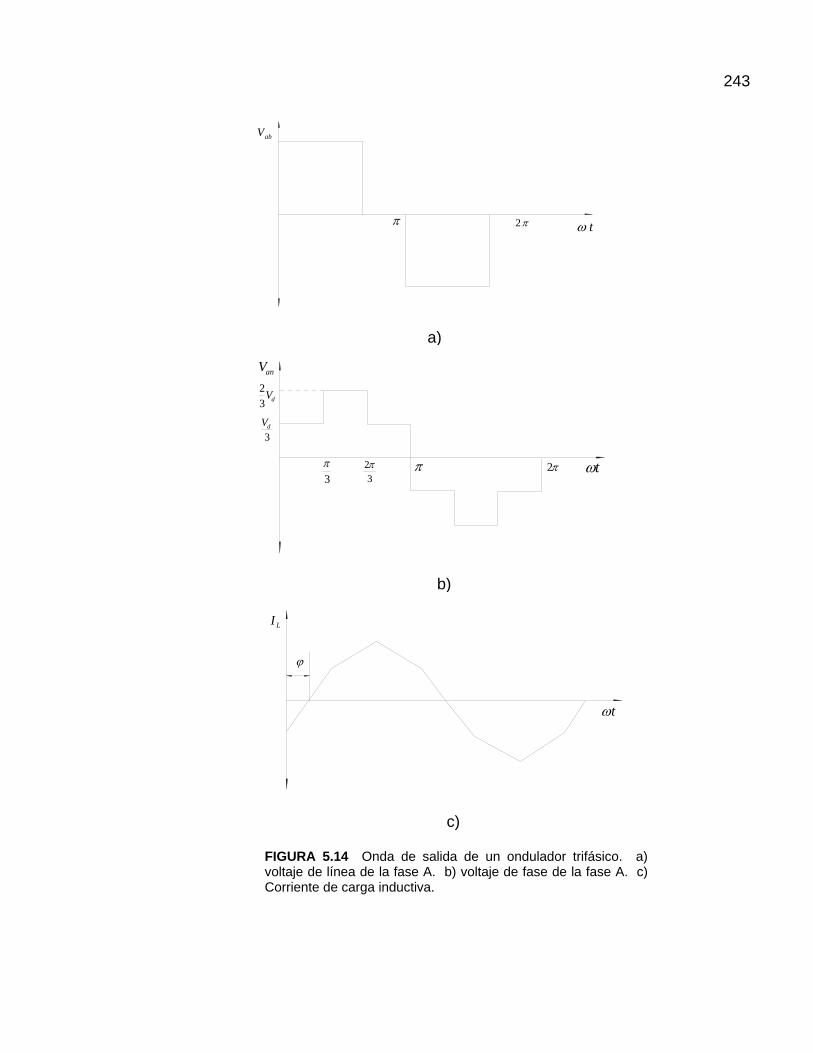
243
t
abV
2
anV
t3
32 2
dV32
3dV
t
LI
a)
b)
c)
FIGURA 5.14 Onda de salida de un ondulador trifásico. a) voltaje de línea de la fase A. b) voltaje de fase de la fase A. c) Corriente de carga inductiva.

244
voltaje será igual al primer intervalo:
3d
a
VV
En el segundo semiperiodo de hasta 2 , para la fase A ocurre lo mismo
que en el primer semiperiodo, solo que sus valores de voltaje de fase
adquieren un signo negativo. Cada fase presenta la misma forma de onda
solo que están desplazadas 120 grados.
El voltaje de línea abV puede ser expresado por una serie de fourier debido al
alto contenido de armónicos presente en la señal.
6sen
6cos
4
2,1
tnnn
VV d
nab 5.30
Cuando la carga es inductiva la corriente de línea aI será:
tnn
nLnRn
VI d
na sen
6cos
3
422
3,2,1
5.31
El retraso de la corriente entra a depender del factor de potencia de la
carga y su forma puede ser apreciada en la figura 5.13c.
La forma de la onda de tensión obtenida, presenta seis estados durante un
período con lo cual es llamada onda de seis pulsos (Six-step), o también
onda cuadrada.
245
El problema radica en que el flujo magnético presentará una forma pulsatoria
igual al voltaje con lo cual al interactuar con la corriente rotorica 2I , creará un
torque motor pulsante con armónicos de 6º. Orden.
La onda de corriente obtenida es muy diferente a una onda senoidal
deseada, esto significa que existen armónicos que deben ser eliminados.
Una forma de lograr este objetivo es empleando motores con altas
inductancias que actúan a manera de filtro, amortiguando los armónicos de
orden mas alto. Estas inductancias también representan que el motor tendrá
altas pérdidas en altos deslizamientos.
5.3.6 Control con PWM. El ondulador de seis pulsos implica una señal de
tensión rica en armónicos que crea problemas de calentamiento excesivo.
El segundo inconveniente es el carácter pulsatorio del torque motor, lo cual
crea un tercer problema representado en un alto nivel de ruido y de
vibraciones.
La solución a estos problemas se consigue con un ondulador que entregue
varios pulsos de tensión en cada semiperiodo. Esto se consigue con la
técnica del control PWM (pulse with modulation), control por ancho de pulso
cuyo circuito elemental se presenta en la figura 5.15.
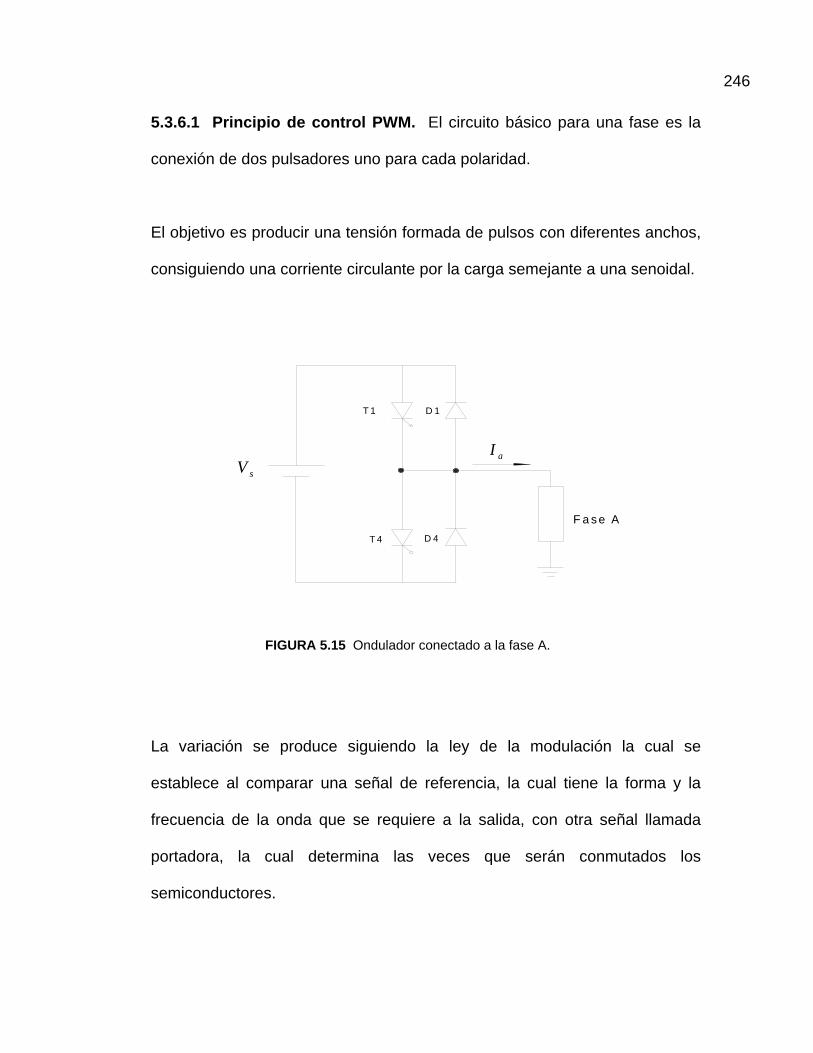
246
5.3.6.1 Principio de control PWM. El circuito básico para una fase es la
conexión de dos pulsadores uno para cada polaridad.
El objetivo es producir una tensión formada de pulsos con diferentes anchos,
consiguiendo una corriente circulante por la carga semejante a una senoidal.
La variación se produce siguiendo la ley de la modulación la cual se
establece al comparar una señal de referencia, la cual tiene la forma y la
frecuencia de la onda que se requiere a la salida, con otra señal llamada
portadora, la cual determina las veces que serán conmutados los
semiconductores.
D 4T 4
D 1T 1
F a s e A
sVaI
FIGURA 5.15 Ondulador conectado a la fase A.

247
Para entender el funcionamiento básico se coloca como señal de referencia
un voltaje constante rV y como señal portadora una onda triangular con
amplitud de voltaje PV . Se modulará tres pulsos en un ciclo, cambiando su
amplitud con el fin de controlar el voltaje de salida en el ondulador. Figura
5.16.
El valor del voltaje promedio:
2
02
1tdtVV sprom
Reemplazando la integral por la suma de las áreas, que encierran los pulsos
generados entre 0 y 2 :
22*
22*2
2
1 ssprom
VVV
Señal de referencia Señal portadora
sV
X
2 t
t
FIGURA 5.16 Modulación por ancho de pulso mediante la comparación de dos señales en
248
12
2 s
prom
VV 5.32
Se observa que el voltaje promedio depende del valor , designación del
ancho del pulso.
En la figura 5.16 el pulso es equivalente a:
x2
La distancia x es un valor que depende de la relación entre el voltaje rV y el
voltaje pV , designándose a este valor el nombre de índice de modulación
de amplitud p
r
V
Vm , con lo cual el pulso será:
p
r
V
V1
2
Si este valor se reemplaza en la ecuación 5.32:
mV
V sprom 2
5.33
La variación del ancho de pulso depende del valor que adquiera m,
oscilando entre valores de 0 y 1, con lo cual el ancho del pulso será
modulado entre 0 y 180 grados. Para establecer el compromiso básico del
ondulador en la eliminación de armónicos, se debe tener presente el
rendimiento del ondulador. Una alta frecuencia en la salida de los pulsos
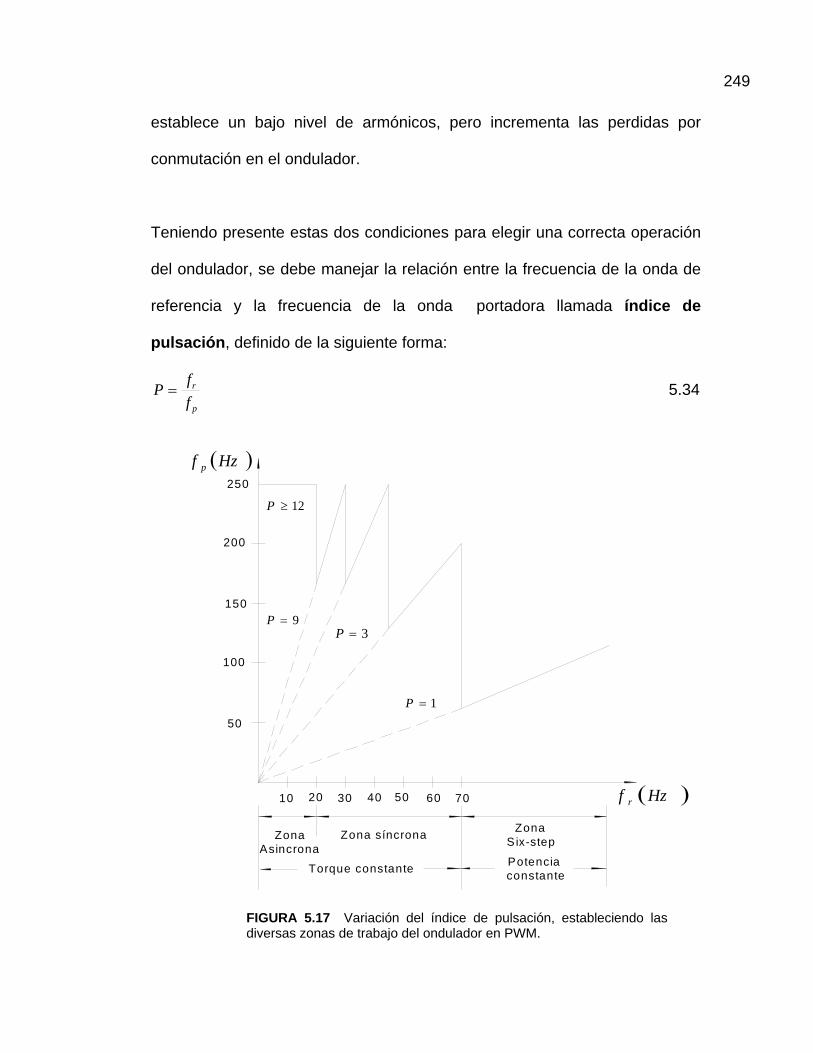
249
establece un bajo nivel de armónicos, pero incrementa las perdidas por
conmutación en el ondulador.
Teniendo presente estas dos condiciones para elegir una correcta operación
del ondulador, se debe manejar la relación entre la frecuencia de la onda de
referencia y la frecuencia de la onda portadora llamada índice de
pulsación, definido de la siguiente forma:
p
r
f
fP 5.34
Zona síncrona ZonaAsincrona
30 4010 20
Zona Six-step
50 60 70
250
50
100
150
200
12P
9P3P
1P
Hzf p
Hzf r
Torque constantePotencia constante
FIGURA 5.17 Variación del índice de pulsación, estableciendo las diversas zonas de trabajo del ondulador en PWM.
250
En la figura 5.17 se puede apreciar tres zonas de trabajo para un ondulador.
Una primera zona de bajas velocidades llamada modulación asíncrona,
donde la frecuencia de conmutación que establece la onda portadora
permanece constante y la frecuencia del voltaje de salida se modula al variar
la frecuencia de la onda de referencia. Este intervalo el índice de pulsación P
se mantiene en un alto valor.
La segunda zona denominada modulación síncrona se inicia desde un valor
de frecuencia determinado con un valor de P optimo constante para tres
rangos de trabajo. En esta zona se varían ambas frecuencias.
La suma de las dos zonas anteriores constituye para el accionamiento la
zona que se designa de torque constante que comprende entre 0 Hz y la
frecuencia nominal. En este trayecto el flujo magnético de la maquina se
mantiene constante y se varia la relación 1
1
f
V de forma constante.
Por encima de la frecuencia nominal, para el ondulador existe una zona
llamada modulación de seis pulsos. Aquí el índice pulsación es igual a uno y
la señal de salida tiene un comportamiento de una onda cuadrada. Para el
accionamiento la zona se describe como zona de potencia constante, donde
el voltaje se mantiene en su valor nominal y el flujo magnético se debilita.

251
Cuando el índice de pulsación es alto se tiene una buena neutralización de
armónicos con un pobre rendimiento del convertidor. Si el índice de
pulsación es pequeño acercándose a uno, el flujo pulsante que se crea en el
motor debido a la forma de la onda, crea perturbaciones en el motor
alterando el torque y la velocidad.
En el control por ancho de pulso existen diversas formas de modulación, las
cuales son ampliamente tratados en libros especializados de electrónica de
potencia. En la siguiente sección se tratará la modulación senoidal
obteniéndose una señal de corriente a la salida muy aproximada a una señal
escasa de armónicos.
5.3.6.2 Modulación senoidal. La señal de referencia es una onda tipo
senoidal que se compara con una señal portadora tipo onda triangular, con
esta técnica se consigue disminuir algunos armónicos al presentar pulsos
con anchos diferentes tratando de perfeccionar su forma para asemejarla
más a una señal senoidal.
El voltaje de fase respecto a un neutro ficticio O se describe en la siguiente
ecuación:
cossen2
armonitV
mV sao
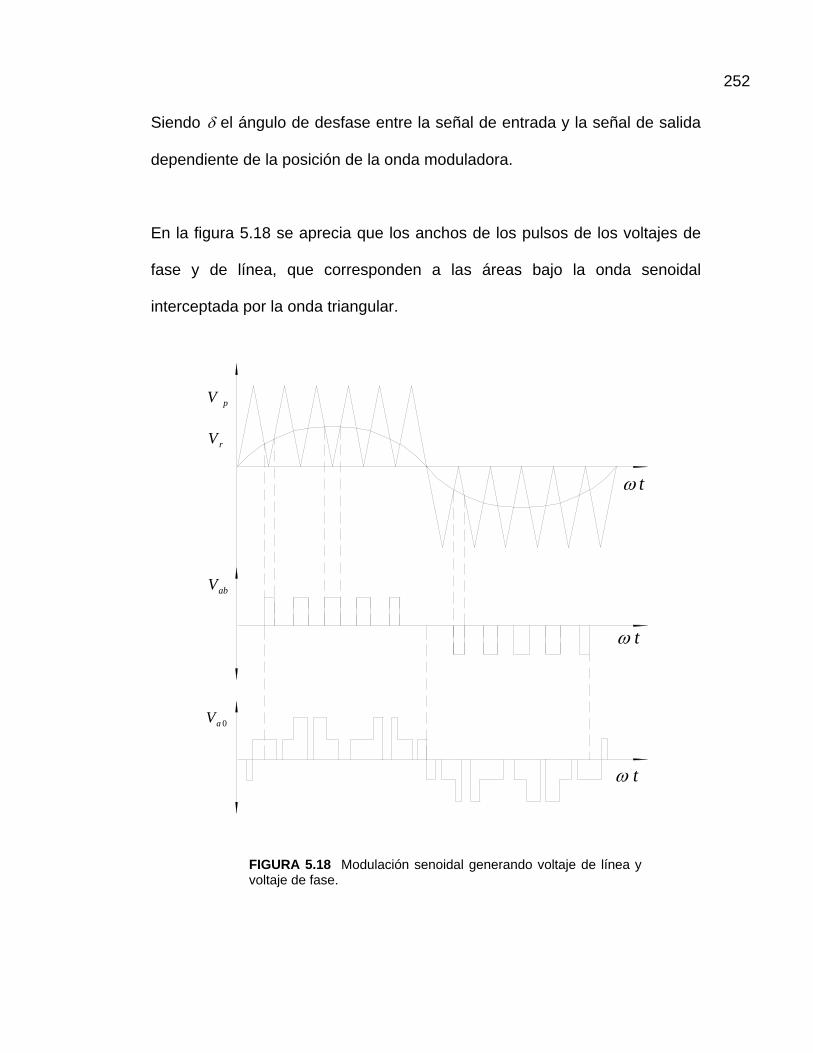
252
Siendo el ángulo de desfase entre la señal de entrada y la señal de salida
dependiente de la posición de la onda moduladora.
En la figura 5.18 se aprecia que los anchos de los pulsos de los voltajes de
fase y de línea, que corresponden a las áreas bajo la onda senoidal
interceptada por la onda triangular.
pV
rV
t
abV
0aV
t
t
FIGURA 5.18 Modulación senoidal generando voltaje de línea y voltaje de fase.
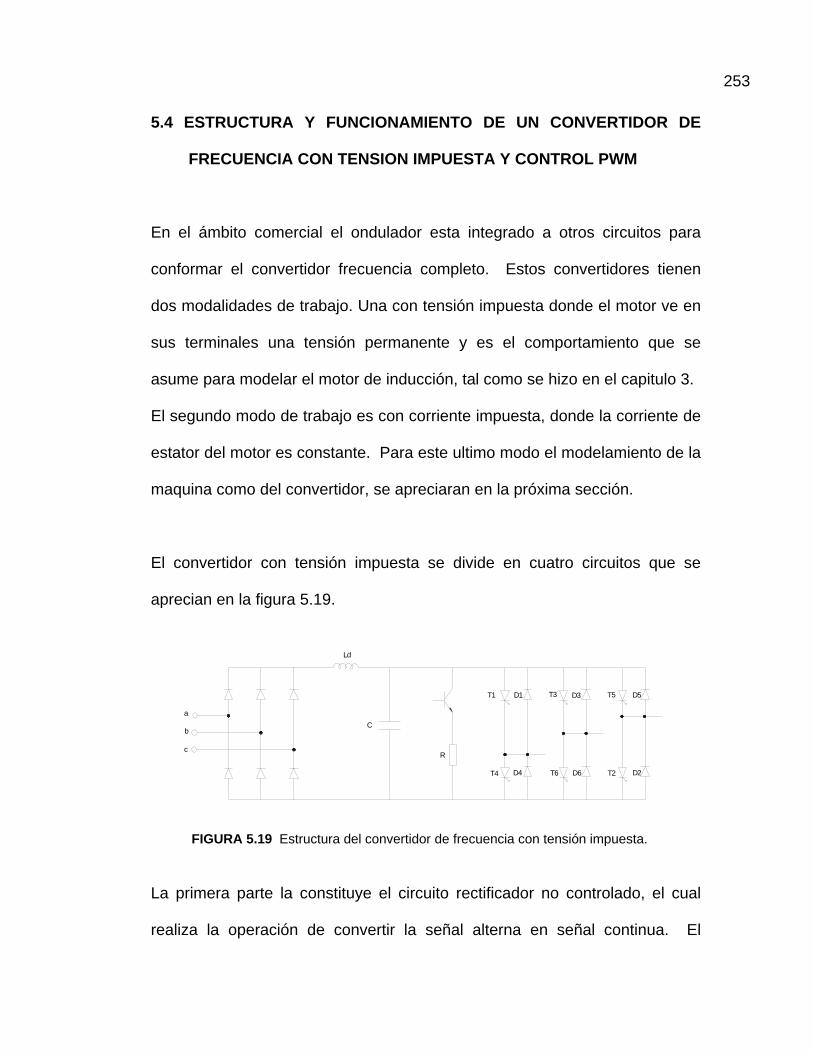
253
5.4 ESTRUCTURA Y FUNCIONAMIENTO DE UN CONVERTIDOR DE
FRECUENCIA CON TENSION IMPUESTA Y CONTROL PWM
En el ámbito comercial el ondulador esta integrado a otros circuitos para
conformar el convertidor frecuencia completo. Estos convertidores tienen
dos modalidades de trabajo. Una con tensión impuesta donde el motor ve en
sus terminales una tensión permanente y es el comportamiento que se
asume para modelar el motor de inducción, tal como se hizo en el capitulo 3.
El segundo modo de trabajo es con corriente impuesta, donde la corriente de
estator del motor es constante. Para este ultimo modo el modelamiento de la
maquina como del convertidor, se apreciaran en la próxima sección.
El convertidor con tensión impuesta se divide en cuatro circuitos que se
aprecian en la figura 5.19.
La primera parte la constituye el circuito rectificador no controlado, el cual
realiza la operación de convertir la señal alterna en señal continua. El
T6T4 D4 T2D6 D2
T3T1 D1 T5 D5D3
Ld
C
Rc
b
a
FIGURA 5.19 Estructura del convertidor de frecuencia con tensión impuesta.
254
funcionamiento del convertidor tiene las mismas condiciones de los
rectificadores del capitulo 4, solo que con diodos en vez de tiristores.
Este rectificador no controlado tiene la ventaja absorber poca energía
reactiva es decir tiene un alto factor de potencia. Pero también proporciona
la limitación de trabajar en un solo cuadrante de operación.
Lo anterior implica la necesidad que parar trabajar en los cuatro cuadrantes
de operación se requiere implementar un rectificador controlado funcionando
como ondulador con el primer rectificador, esto conectado en serie con un
transformador especial que acondiciona las tensiones desfasadas que
entrega el ondulador con respecto a la red. Esto conlleva a una mayor
inversión económica.
El segundo circuito es un filtro LC encargado de alisar la tensión suministrada
por el rectificador.
El tercer circuito esta conformado por un pulsador en serie con una
resistencia de frenado. Esta parte del convertidor es empleada para disipar
la energía que devuelve el motor al ingresar en un estado de frenado
regenerativo. Esta implementación se debe a que en muchas ocasiones la
fuente que alimenta el convertidor no se encuentra en capacidad de
recepcionar la energía devuelta en el frenado.
255
La potencia que es capaz de disipar la resistencia es:
fr
dfr R
VP
2
Siendo dV el voltaje que entrega el rectificador.
En un convertidor de seis pulsos este voltaje dV varia de acuerdo al control
que ejerce el rectificador controlado, a pesar del circuito intermedio LC de
corriente continua. Como en un convertidor PWM el rectificador es no
controlado este voltaje se mantiene constante.
En el instante que se produce el frenado una corriente continua fluye hacia el
rectificador cargando el condensador del filtro con un voltaje que polariza de
forma adecuada el pulsador que comanda la resistencia de frenado.
Comúnmente el pulsador que se emplea en el circuito de frenado es un IGBT
debido a su alta velocidad de conmutación, que evita producir ruido en el
convertidor.
El cuarto circuito es el ondulador trifásico que se ha tratado en la sección
anterior. Solo queda mencionar que en la actualidad los tiristores se han
reemplazado por GTO’S e IGBT’S.
5.5 CONTROL DE LA CORRIENTE DE ESTATOR
256
En el análisis hecho la motor inducción para modelar su circuito equivalente
se acostumbra, partir de una alimentación con voltaje constante, esto es
común apreciarlos en los diferentes textos de máquinas eléctricas para el
estudio de los convertidores de frecuencia, en la presente sección se hace
necesario conocer el estudio que se puede realizar al motor partiendo de una
alimentación con corriente de estator 1I constante.
El circuito equivalente del motor de inducción puede ser representado
despreciando las perdidas en el hierro como el mostrado en la figura 5.9.
Este circuito permite realizar un análisis de divisor de corrientes con lo cual
se pueden expresar las corrientes de magnetización y de rotor en función de
la corriente de estator.
1222
'2
/I
XSR
XI
K
m
5.35
1
22'2
2'2
22
/
/I
XSR
SRXI
K
m
5.36
Siendo:
'2XXX mK
De las ecuaciones obtenidas se puede observar que mediante el control de la
corriente de estator se puede controlar la corriente magnetizante y la
corriente del rotor.
257
Reemplazando en la ecuación 3.1 vista en el capítulo 3, la corriente 2I :
2
12
'2
2'23
I
XS
R
X
S
R
K
m
s 5.37
En la figura 5.20 se aprecia una curva característica simétrica respecto al
deslizamiento cero.
El deslizamiento máximo en el que ocurre el torque máximo se obtiene
derivando la ecuación 5.37 e igualando a cero.
Km X
RS
'2
5.38
Reemplazando es deslizamiento máximo en la ecuación 5.37.
21
2
2
3I
X
X
Ks
mmax
Si se expresan las reactancias en función de su frecuencia y sus
inductancias:
21
1
1
)(22
23I
Lf
Lf
K
mmax
21)(2
3I
L
L
K
mmax 5.39
Con lo anterior se puede afirmar que el torque máximo depende del cuadrado
de la corriente de estator y es independiente de la frecuencia de
alimentación.
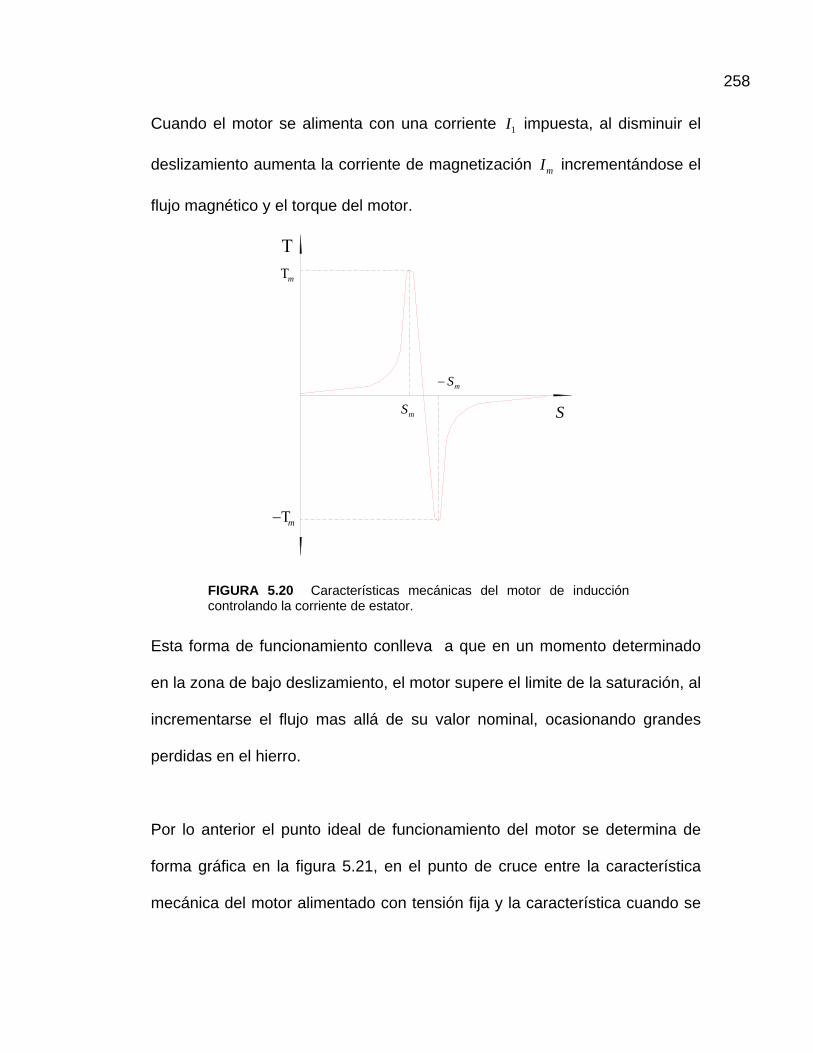
258
Cuando el motor se alimenta con una corriente 1I impuesta, al disminuir el
deslizamiento aumenta la corriente de magnetización mI incrementándose el
flujo magnético y el torque del motor.
Esta forma de funcionamiento conlleva a que en un momento determinado
en la zona de bajo deslizamiento, el motor supere el limite de la saturación, al
incrementarse el flujo mas allá de su valor nominal, ocasionando grandes
perdidas en el hierro.
Por lo anterior el punto ideal de funcionamiento del motor se determina de
forma gráfica en la figura 5.21, en el punto de cruce entre la característica
mecánica del motor alimentado con tensión fija y la característica cuando se
mS S
mS
m
m
FIGURA 5.20 Características mecánicas del motor de inducción controlando la corriente de estator.

259
impone la corriente del estator. Este punto determina la corriente de
magnetización nominal mnI , con lo cual cualquier carga colocada en el eje del
motor debe ser trabajada al rededor de ese valor.
La zona que demarca el trabajo ideal del motor con una corriente de estator
impuesta, representa en la curva característica la inestabilidad del motor, por
lo tanto el accionamiento se debe trabajar con un control especial en bucle
cerrado.
El torque de arranque conseguido es muy bajo, al igual que la corriente
debido a la alta reactancia magnetizante que posee el motor en ese instante.
'mSmS
Corriente constante
Punto ideal de operacion
m
S
voltaje constante
FIGURA 5.21 Características mecánicas del motor de inducción controlando la corriente y voltaje de estator.
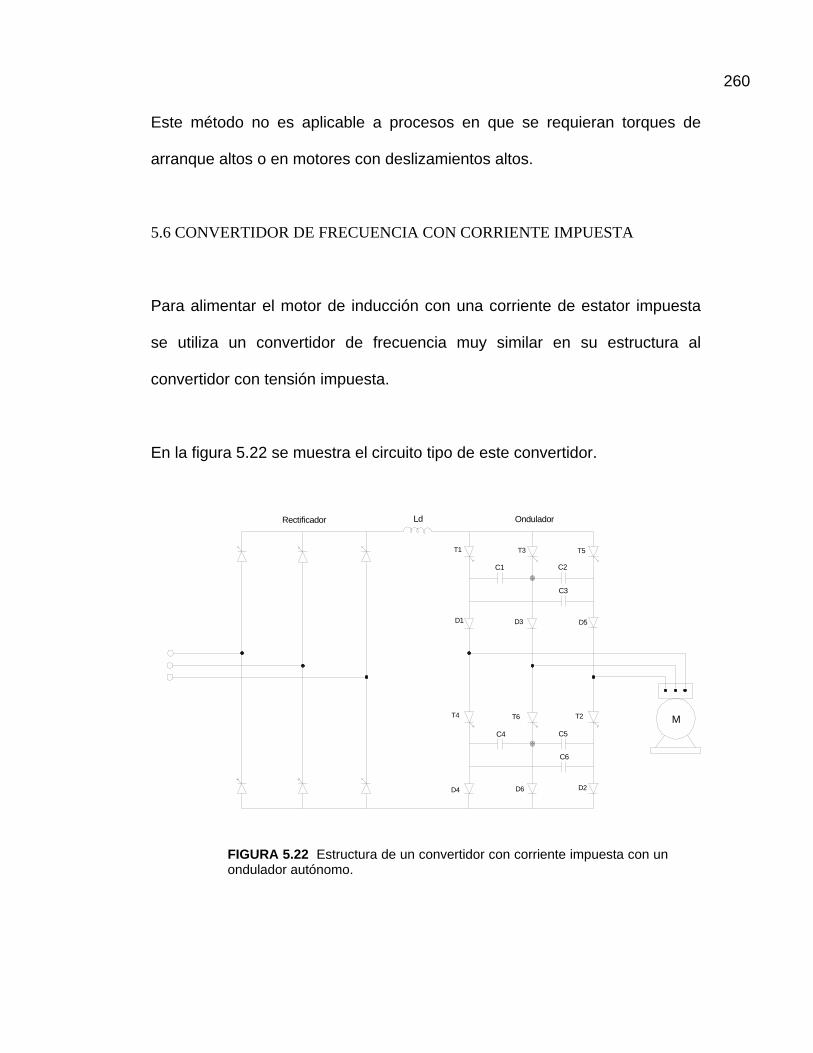
260
Este método no es aplicable a procesos en que se requieran torques de
arranque altos o en motores con deslizamientos altos.
5.6 CONVERTIDOR DE FRECUENCIA CON CORRIENTE IMPUESTA
Para alimentar el motor de inducción con una corriente de estator impuesta
se utiliza un convertidor de frecuencia muy similar en su estructura al
convertidor con tensión impuesta.
En la figura 5.22 se muestra el circuito tipo de este convertidor.
T3 T5
T4 T6 T2
D1 D3 D5
D2D6D4
T1
C1 C2
C3
C4 C5
C6
M
LdRectificador Ondulador
FIGURA 5.22 Estructura de un convertidor con corriente impuesta con un ondulador autónomo.
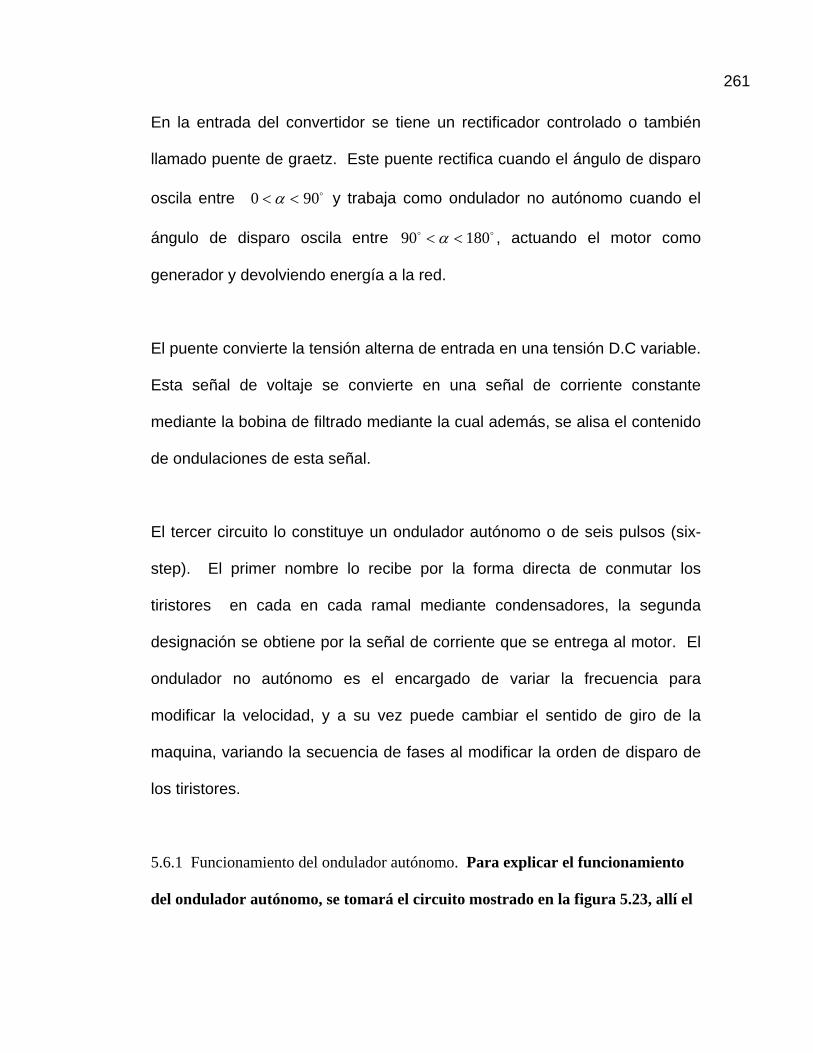
261
En la entrada del convertidor se tiene un rectificador controlado o también
llamado puente de graetz. Este puente rectifica cuando el ángulo de disparo
oscila entre 900 y trabaja como ondulador no autónomo cuando el
ángulo de disparo oscila entre 18090 , actuando el motor como
generador y devolviendo energía a la red.
El puente convierte la tensión alterna de entrada en una tensión D.C variable.
Esta señal de voltaje se convierte en una señal de corriente constante
mediante la bobina de filtrado mediante la cual además, se alisa el contenido
de ondulaciones de esta señal.
El tercer circuito lo constituye un ondulador autónomo o de seis pulsos (six-
step). El primer nombre lo recibe por la forma directa de conmutar los
tiristores en cada en cada ramal mediante condensadores, la segunda
designación se obtiene por la señal de corriente que se entrega al motor. El
ondulador no autónomo es el encargado de variar la frecuencia para
modificar la velocidad, y a su vez puede cambiar el sentido de giro de la
maquina, variando la secuencia de fases al modificar la orden de disparo de
los tiristores.
5.6.1 Funcionamiento del ondulador autónomo. Para explicar el funcionamiento
del ondulador autónomo, se tomará el circuito mostrado en la figura 5.23, allí el
262
motor se modela por medio de tres fuentes de voltajes inducidas en serie con
unas inductancias que modelan todas las inductancias del motor referidas al
estator.
Esta operación con el motor se realiza para observar la incidencia que tiene
en el fenómeno de conmutación con este tipo de ondulador.
Los tiristores estructuran la corriente en bloques rectangulares de 120
grados eléctricos de duración. Los condensadores establecen la
conmutación de los tiristores sin necesidad de circuitos de apagado. Los
diodos cumplen la función de aislar los condensadores de la carga. La
D5D1 D3
A
CL C'
BL
L
nB'
A'
T1
C3
C2
T3
C1
T51CI 2CI
dI
aI
bI
cI
naV '
nbV '
ncV '
-+(+) (-)
FIGURA 5.23 Ondulador autónomo con el motor modelado por fuentes e inductancias.
263
operación del ondulador se ve afectada por la conmutación de un tiristor a
otro.
Si en un primer estado en el ondulador conducen el tiristor T1, el diodo D1
proporcionando la corriente al motor a través de la fase A. La corriente de
retorno al convertidor la conducen el tiristor T2, el diodo D2 a través de la
fase C. En este momento los condensadores poseen las polaridades que se
presentan en la figura 5.23 sin paréntesis.
Las tensiones de línea antes de la conmutación son:
dab VV
0bcV
dca VV
En un instante 1t se envía un pulso de disparo al tiristor T3, con lo cual se
polariza en inverso al tiristor T1 gracias a la polaridad del voltaje abV . En este
momento la corriente dI no puede cambiar instantáneamente debido a la
acción de la bobina de filtrado, con ello la corriente circulara por el tiristor T3
y los condensadores C1,C2, C3, el diodo D1 y la fase A del motor.
El sentido que adquiere la corriente comienza a polarizar los condensadores
con los signos entre paréntesis establecidos en la figura 5.23.
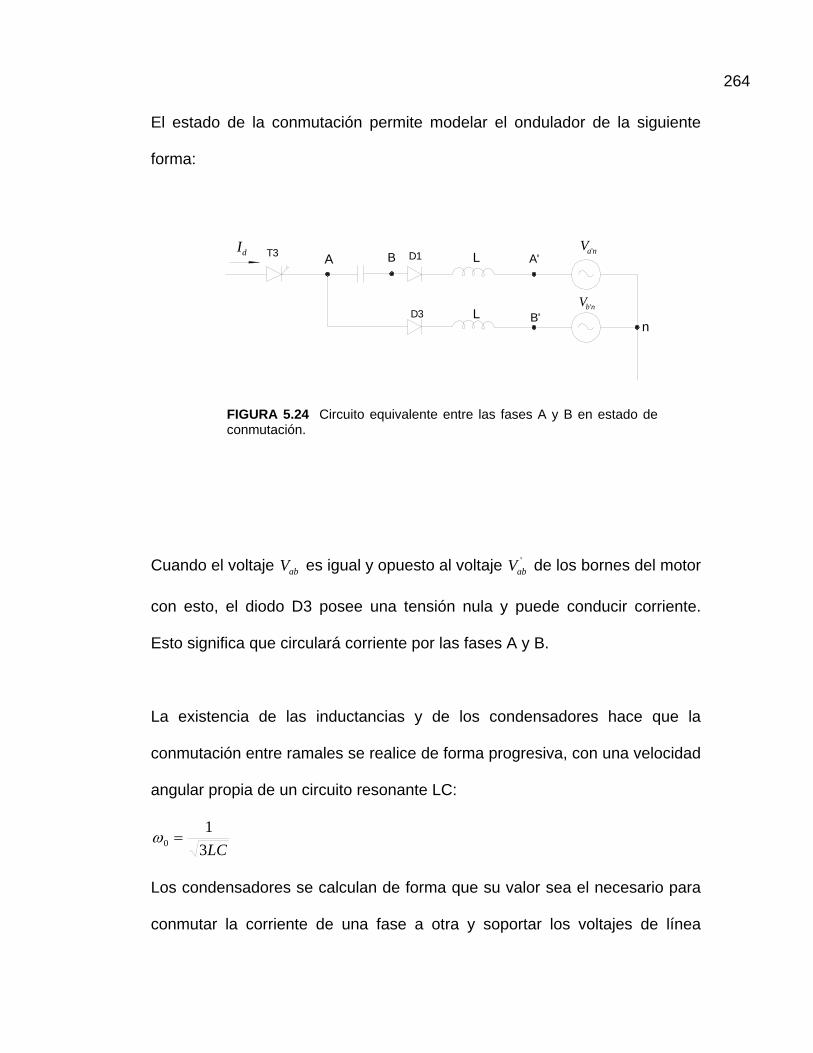
264
El estado de la conmutación permite modelar el ondulador de la siguiente
forma:
Cuando el voltaje abV es igual y opuesto al voltaje 'abV de los bornes del motor
con esto, el diodo D3 posee una tensión nula y puede conducir corriente.
Esto significa que circulará corriente por las fases A y B.
La existencia de las inductancias y de los condensadores hace que la
conmutación entre ramales se realice de forma progresiva, con una velocidad
angular propia de un circuito resonante LC:
LC3
10
Los condensadores se calculan de forma que su valor sea el necesario para
conmutar la corriente de una fase a otra y soportar los voltajes de línea
D3 L
AT3 B D1 L
B'n
A'dI naV '
nbV '
FIGURA 5.24 Circuito equivalente entre las fases A y B en estado de conmutación.
265
establecidos. Lo anterior indica que la duración de la conmutación depende
en gran porcentaje del valor de las inductancias del motor.
En la conmutación como se aprecia en la figura 5.24 la suma de las
corrientes son:
dba III
Cuando la corriente db II en la fase B significa que el estado de
conmutación ha terminado en un instante 3t , en este momento se conduce
corriente por T3, D3 y la fase B.
Los voltajes de línea cambian de la siguiente manera:
dab VV
dbc VV
0caV
La onda de voltaje que se obtiene con este convertidor es de forma senoidal,
con lo cual el flujo magnético también tendrá esta forma. Si este flujo
magnético senoidal interactúa con una corriente de onda cuadrada, creará un
torque motor con armónicos de sexto orden, el cual tiene la siguiente forma:
En frecuencias bajas el estado pulsante del torque será sentido por la carga,
ocasionando vibraciones en ella.
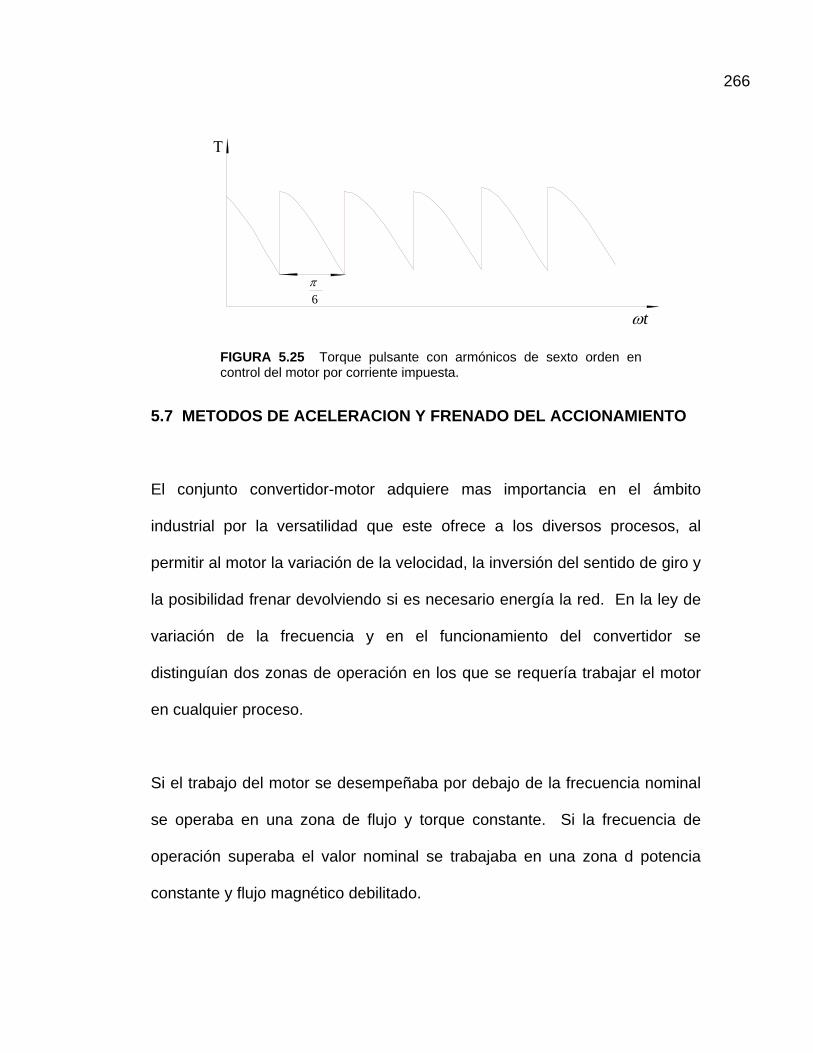
266
5.7 METODOS DE ACELERACION Y FRENADO DEL ACCIONAMIENTO
El conjunto convertidor-motor adquiere mas importancia en el ámbito
industrial por la versatilidad que este ofrece a los diversos procesos, al
permitir al motor la variación de la velocidad, la inversión del sentido de giro y
la posibilidad frenar devolviendo si es necesario energía la red. En la ley de
variación de la frecuencia y en el funcionamiento del convertidor se
distinguían dos zonas de operación en los que se requería trabajar el motor
en cualquier proceso.
Si el trabajo del motor se desempeñaba por debajo de la frecuencia nominal
se operaba en una zona de flujo y torque constante. Si la frecuencia de
operación superaba el valor nominal se trabajaba en una zona d potencia
constante y flujo magnético debilitado.
t6
FIGURA 5.25 Torque pulsante con armónicos de sexto orden en control del motor por corriente impuesta.
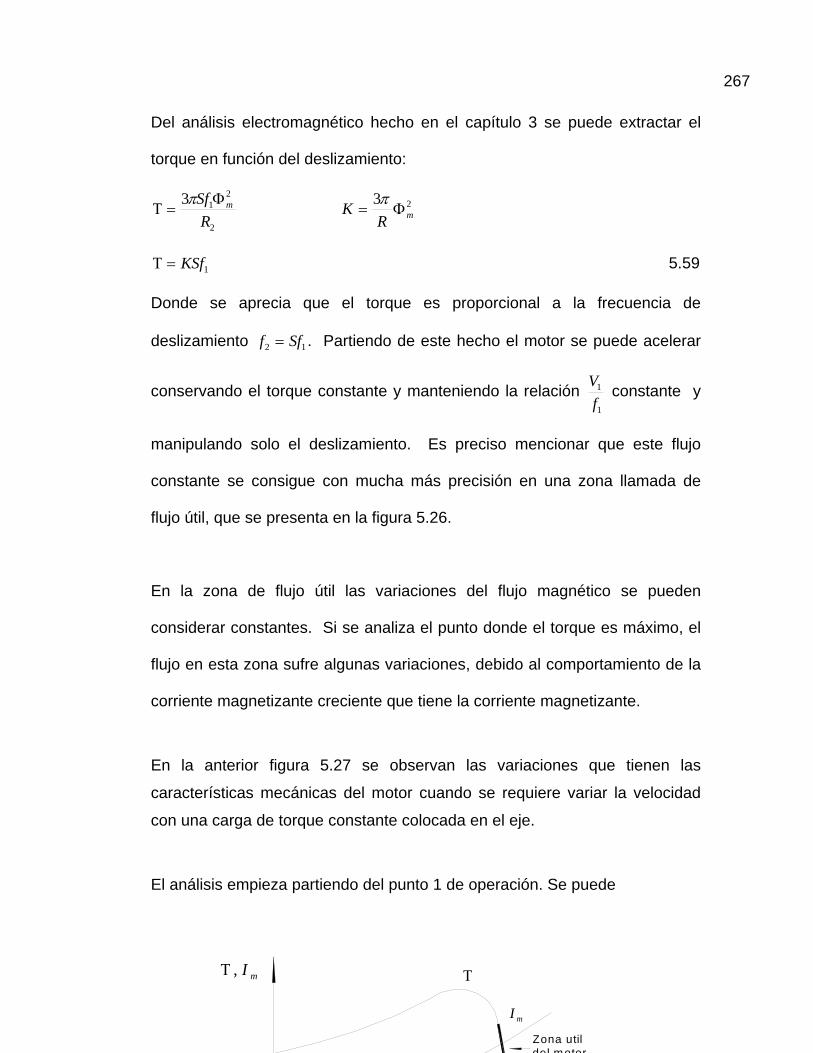
267
Del análisis electromagnético hecho en el capítulo 3 se puede extractar el
torque en función del deslizamiento:
2
213
R
Sf m
23
mRK
1KSf 5.59
Donde se aprecia que el torque es proporcional a la frecuencia de
deslizamiento 12 Sff . Partiendo de este hecho el motor se puede acelerar
conservando el torque constante y manteniendo la relación 1
1
f
V constante y
manipulando solo el deslizamiento. Es preciso mencionar que este flujo
constante se consigue con mucha más precisión en una zona llamada de
flujo útil, que se presenta en la figura 5.26.
En la zona de flujo útil las variaciones del flujo magnético se pueden
considerar constantes. Si se analiza el punto donde el torque es máximo, el
flujo en esta zona sufre algunas variaciones, debido al comportamiento de la
corriente magnetizante creciente que tiene la corriente magnetizante.
En la anterior figura 5.27 se observan las variaciones que tienen las
características mecánicas del motor cuando se requiere variar la velocidad
con una carga de torque constante colocada en el eje.
El análisis empieza partiendo del punto 1 de operación. Se puede
mI,
mI
Zona util del motor
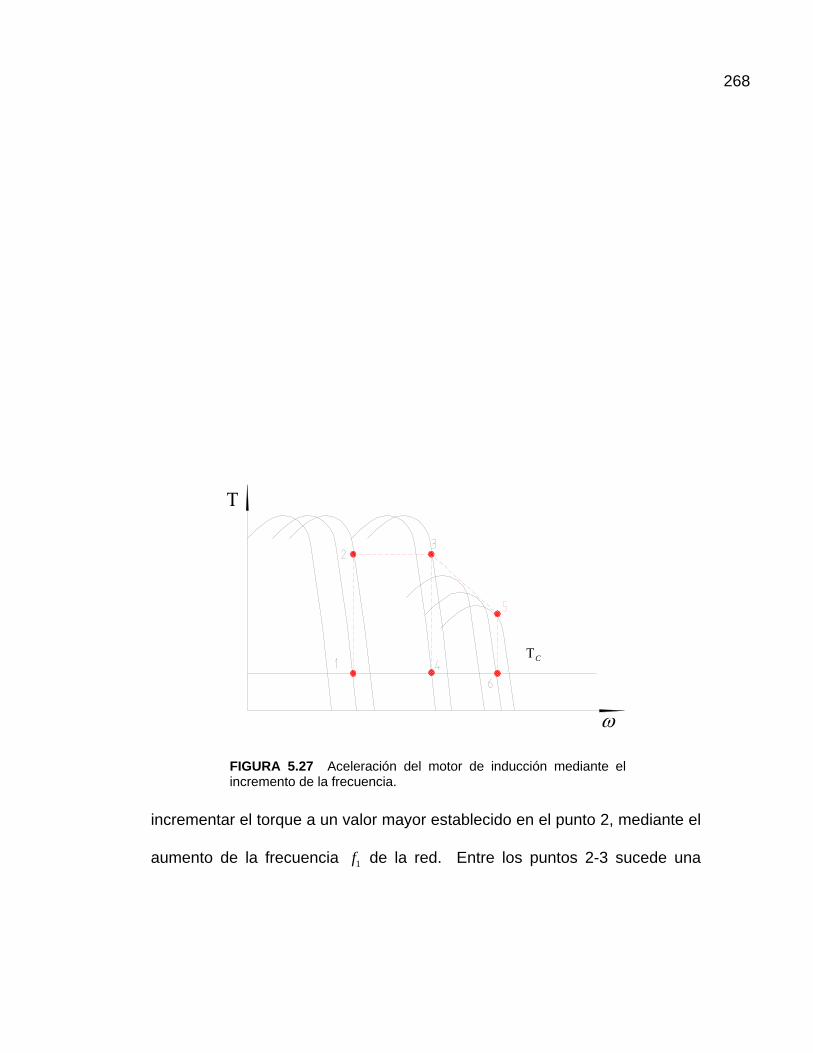
268
incrementar el torque a un valor mayor establecido en el punto 2, mediante el
aumento de la frecuencia 1f de la red. Entre los puntos 2-3 sucede una
C
FIGURA 5.27 Aceleración del motor de inducción mediante el incremento de la frecuencia.
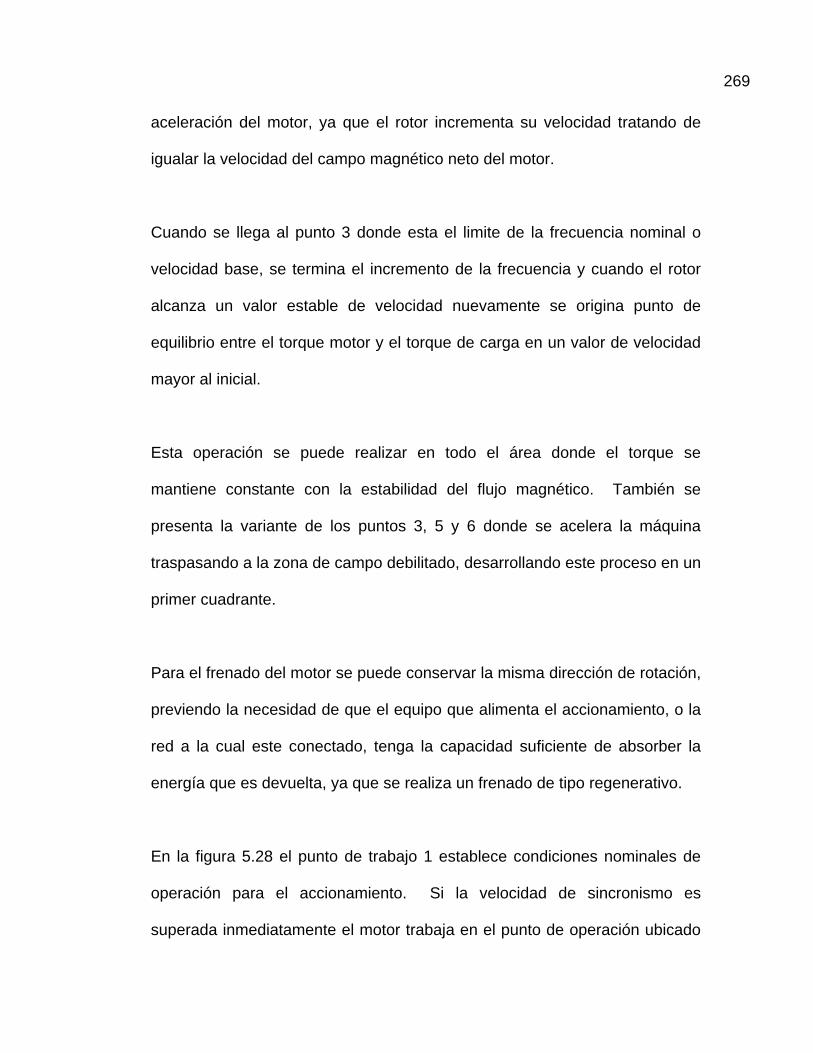
269
aceleración del motor, ya que el rotor incrementa su velocidad tratando de
igualar la velocidad del campo magnético neto del motor.
Cuando se llega al punto 3 donde esta el limite de la frecuencia nominal o
velocidad base, se termina el incremento de la frecuencia y cuando el rotor
alcanza un valor estable de velocidad nuevamente se origina punto de
equilibrio entre el torque motor y el torque de carga en un valor de velocidad
mayor al inicial.
Esta operación se puede realizar en todo el área donde el torque se
mantiene constante con la estabilidad del flujo magnético. También se
presenta la variante de los puntos 3, 5 y 6 donde se acelera la máquina
traspasando a la zona de campo debilitado, desarrollando este proceso en un
primer cuadrante.
Para el frenado del motor se puede conservar la misma dirección de rotación,
previendo la necesidad de que el equipo que alimenta el accionamiento, o la
red a la cual este conectado, tenga la capacidad suficiente de absorber la
energía que es devuelta, ya que se realiza un frenado de tipo regenerativo.
En la figura 5.28 el punto de trabajo 1 establece condiciones nominales de
operación para el accionamiento. Si la velocidad de sincronismo es
superada inmediatamente el motor trabaja en el punto de operación ubicado
270
en el cuadrante II de frenado regenerativo donde el motor actúa como
generador. En este cuadrante el torque motor invierte su sentido volviéndose
negativo y contrario a la velocidad del campo magnético.
El trayecto demarcado entre los puntos 2-3 se produce el llamado frenado
recuperativo devolviéndose energía a la red. El torque motor al sumarse al
torque de carga produce un torque resultante que frena el rotor disminuyendo
la velocidad. En el punto 3 se disminuye la frecuencia de la red a un valor
menor que el nominal, donde el torque motor regresa al sentido que poseía al
inicio y se equilibra con el torque de carga en un valor menor al inicial.
C
FIGURA 5.28 Frenado del motor de inducción disminuyendo la frecuencia y devolviendo energía a la red.
271
En muchas de las ocasiones la potencia que es devuelta no puede ser
absorbida por la fuente o red, por lo cual se debe disipar esta potencia a
través de una resistencia.
En diversos procesos la energía que el accionamiento devuelve en el frenado
regenerativo no puede ser asimilada por la red. En esta situación es
necesario recurrir a un frenado con deslizamiento nulo, con un valor de
frecuencia cero que entrega el convertidor. El torque motor se anula y el
único torque predominante en el accionamiento es el torque de carga.
En la figura 5.29 se observa que la operación se realiza partiendo del punto 1
de estado estable del accionamiento, cuando se haga cero la frecuencia 1f ,
el torque de carga impone su sentido contrario al movimiento del rotor
produciéndose el frenado de la maquina recorriendo el trayecto 2-3.
Al ubicarse en el punto 3 se restablece la frecuencia 1f en su valor nominal.
El torque de carga y el torque motor se estabiliza en el punto 4 de operación
a una velocidad menor a al inicial. Este proceso no puede controlarse de
manera eficiente, ya que depende de la naturaleza del sistema comandado
por su inercia. Este tipo de frenado solo utiliza un cuadrante de operación
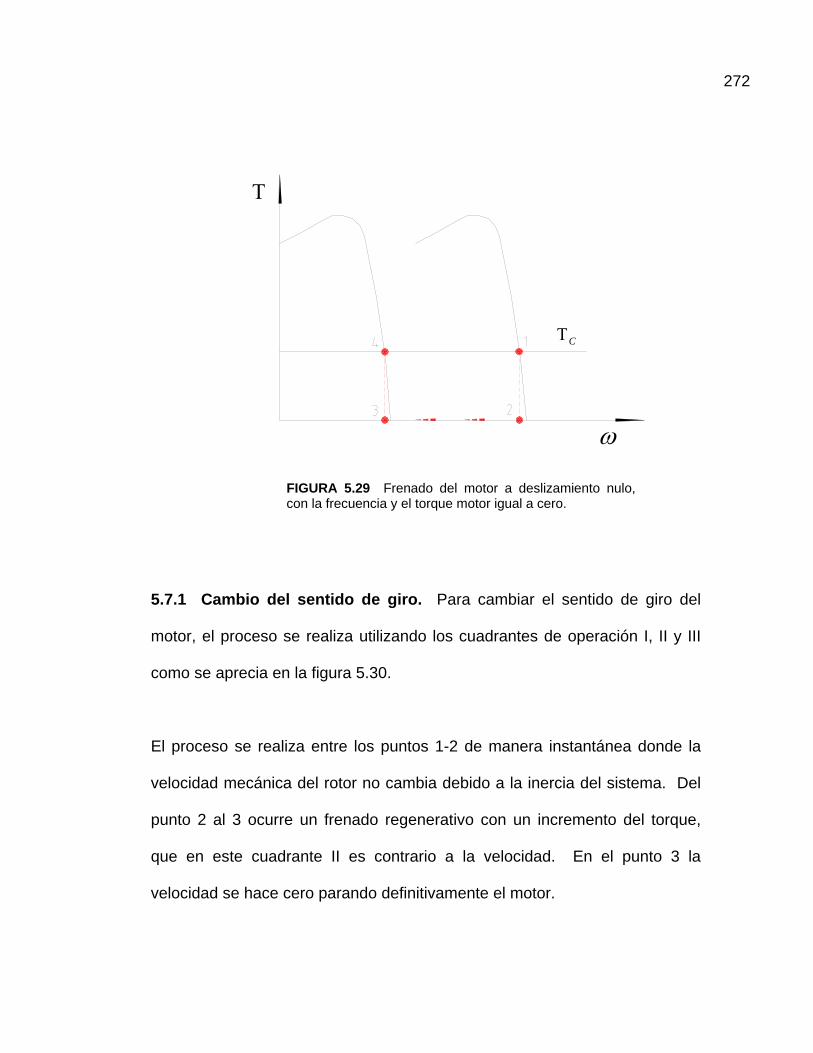
272
5.7.1 Cambio del sentido de giro. Para cambiar el sentido de giro del
motor, el proceso se realiza utilizando los cuadrantes de operación I, II y III
como se aprecia en la figura 5.30.
El proceso se realiza entre los puntos 1-2 de manera instantánea donde la
velocidad mecánica del rotor no cambia debido a la inercia del sistema. Del
punto 2 al 3 ocurre un frenado regenerativo con un incremento del torque,
que en este cuadrante II es contrario a la velocidad. En el punto 3 la
velocidad se hace cero parando definitivamente el motor.
C
FIGURA 5.29 Frenado del motor a deslizamiento nulo, con la frecuencia y el torque motor igual a cero.
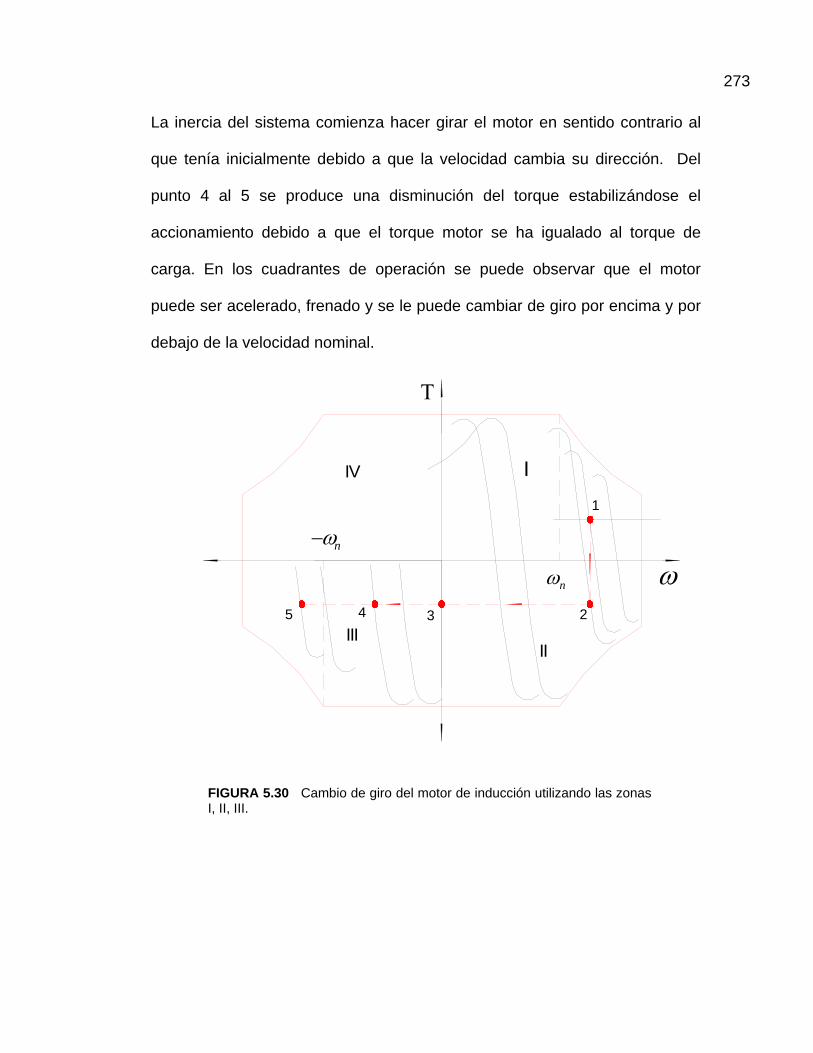
273
La inercia del sistema comienza hacer girar el motor en sentido contrario al
que tenía inicialmente debido a que la velocidad cambia su dirección. Del
punto 4 al 5 se produce una disminución del torque estabilizándose el
accionamiento debido a que el torque motor se ha igualado al torque de
carga. En los cuadrantes de operación se puede observar que el motor
puede ser acelerado, frenado y se le puede cambiar de giro por encima y por
debajo de la velocidad nominal.
I
II
IV
III
1
234
n
n
5
FIGURA 5.30 Cambio de giro del motor de inducción utilizando las zonas I, II, III.
274
CONCLUSIONES Cuando un motor trabaja conjuntamente con una carga, se determina un
punto de operación. El cual físicamente se establece cuando hay equilibrio
entre el torque motor y el torque de carga a un valor de velocidad que se
mantiene constante. Gráficamente es la intersección entre las curvas que
describen las características mecánicas y de la carga.
Para implementar un sistema drive motor carga, debe primero conocerse el
comportamiento dinámico de la carga, el cual incluye su rango de velocidad o
punto de velocidad en el caso de que no sea necesario ser variada. En este
caso, si la velocidad requerida es la que se obtiene a la salida del eje de un
motor con un numero de polos determinado, no es necesario el uso de un
drive. Como segunda medida, para elegir el tipo de motor, este debe
satisfacer la condición de poder entregar a la carga un torque de arranque
mayor que el de la carga, por que, de lo contrario no solo no arrancara el
sistema, si no que se podría dañar el motor.
275
La estabilidad de un sistema motor carga, esta determinado por el tipo de
curva característica del motor, la característica mecánica de la carga y el sitio
de las características donde se ubica el punto de trabajo. Es necesario en
los sistemas de este tipo, trabajar en condiciones de estabilidad.
En los motores de corriente continua la forma mas utilizada para modificar la
velocidad es variar su nivel promedio de voltaje que es aplicado a los
terminales de la armadura. Este control del voltaje puede ser realizado
mediante convertidores duales y pulsadores. El convertidor transforma una
señal continua controlada mediante la modificación de los periodos de
conducción de los dispositivos semiconductores (tiristores). El pulsador
actúa produciendo unos pulsos controlados en amplitud y en frecuencia a
partir de un voltaje D.C.
Al motor de inducción se le puede variar la velocidad controlando su voltaje
de entrada mediante la utilización de controladores de fase, los cuales
entregan señales de voltaje no senoidales que producen corrientes
discontinuas en el devanado del estator. Esta forma de control implica un
alto deslizamiento para el motor, ocasionando altas perdidas por calor,
además el torque de arranque obtenido es muy bajo. Los motores más
empleados para este tipo de control son los motores de diseño NEMA tipo D.
276
El control de la velocidad mas empleado en el motor de inducción es
mediante la variación de la frecuencia y el voltaje. Los circuitos electrónicos
empleados para este propósito están estructurados en tres etapas básicas un
rectificador, un circuito D.C y un ondulador, el cual mediante un control PWM
entrega al motor una señal conmutada con una frecuencia y un voltaje
modulados de acuerdo al nivel de velocidad que el accionamiento requiera.
Las ventajas que ofrece el uso de variadores de frecuencia son entre otras:
Aumento de la productividad.
Ahorro de energía.
Control de la velocidad.
Arranques suaves.
Operación optima del motor.
Las desventajas que ofrecen están relacionadas con los efectos de
armónicos que se producen a ala red de tensión y con los efectos que se
presentan en el motor, entre los cuales se encuentran:
La alta velocidad de conmutación de las señales de tensión que se entregan
a un motor, someten a los aislamientos de sus devanados a grandes
esfuerzos dieléctricos, lo que implica que deben mejor ser mejor diseñados
en este aspecto para uso exclusivo de drives. Se ha llegado a determinar
que la vida útil de un motor alimentado con un variador de velocidad que
277
conmuta las señales de tensión a 10 KHZ, se reduce si la distancia al motor
es menor a 10 metros.
Cuando la distancia entre el drive y el motor, es mayor a 30 metros, se
presentan problemas de sobretensión por reflexión de onda, llegando a
presentarse picos de voltaje en el motor del orden de 1600 voltios, lo que
produce cortocircuitos entre sus espiras.
Se presentan fallas en los rodamientos del motor por acople capacitivo,
debido a que en altas frecuencias, entre el estator, el devanado de estator y
el rotor, se crean unas capacitancias que a determinadas frecuencias
producen descargas de corriente en los rodamientos, rompiendo la rigidez
dieléctrica de su lubricante.
Este sistema implica un control con una variación conjunta 1
1
f
V para
mantener el flujo magnético del motor de inducción constante, si se manejan
velocidades por debajo de la velocidad nominal. Este control se realiza en
una zona llamada ZONA DE TORQUE CONSTANTE, aquí el motor de
inducción esta en capacidad de entregar un torque máximo.
Si la velocidad es variada por encima del valor nominal, el voltaje se
mantiene en su valor nominal de forma constante, ocasionando que la

278
relación 1
1
f
V decrezca disminuyendo de forma directa el flujo de la maquina.
Este control se realiza en una zona llamada ZONA DE CAMPO DEBILITADO
O POTENCIA CONSTANTE, en esta zona el motor entrega un valor de
torque máximo reducido, pero a una potencia constante debido a que la
disminución del torque es proporcional con el aumento de la velocidad.
En bajas frecuencias, es decir por debajo de la velocidad nominal en un
rango de 0 hasta 15 Hz, el flujo magnético también presenta una disminución
debido a la importancia que adquiere la caída de tensión en la resistencia del
estator. En esta condición la reactáncia de magnetización se reduce de
forma ostensible influyendo también que la maquina pierda capacidad de
carga al mermar el torque producido que es causa del flujo. Para solucionar
este inconveniente los equipos convertidores de frecuencia en la zona de
bajas frecuencias, aplican un voltaje de compensación llamado voltaje
BOOST manteniendo constante la relación entre voltaje y frecuencia.
El drive con el cual se hizo la práctica, ofrece una operación al motor de ser
frenado de forma disipativa, el cual por medio de una resistencia disipa la
energía que el motor entrega en el frenado regenerativo.
Otra forma alternativa de frenar un motor de inducción es mediante la
inyección de una corriente D.C, la cual crea en el motor un torque de frenado.
279
La magnitud de esta corriente D.C oscila en un rango comprendido entre 0
hasta un 250% de la corriente nominal del motor.
Los convertidores de frecuencia introducen hacia la red un alto nivel de
armónicos de corriente debido a la forma de onda de tensión no senoidal que
entregan al motor. Este fenómeno se observa tanto en los motores D.C y
A.C debido al efecto de la conmutación de los semiconductores controlados.
Estos armónicos están íntimamente relacionados con el consumo de
potencia reactiva del sistema electromecánico.
El ruido generado hacia la red puede ser reducido mediante la utilización de
filtros.
En el funcionamiento de la maquina de A.C por encima de la velocidad
nominal la frecuencia de la corriente que circula por sus devanados produce
un incremento en las perdidas por corrientes parásitas.
Los convertidores de D.C y de A.C emplean en muchas aplicaciones
transductores como tacogeneradores, sondas térmicas, sensores de posición
etc, los cuales actúan como lazos de retroalimentación convirtiendo el
sistema convertidor-motor-carga en un sistema de control de lazo cerrado.
280
En la actualidad se están diseñando sistemas convertidores de frecuencia
como los de la empresa NFO Drives AB, los cuales funcionan con una
tecnología denominada SWITH SENOIDAL, que permiten amplificar una
señal senoidal de gran potencia y frecuencia variable generada por un
sistema que produce una señal senoidal perfecta de referencia de baja
potencia. Esto implica que no habrán perdidas por calentamiento debido a la
conmutación de semiconductores controlados mediante la técnica PWM.
Tampoco existirán grandes esfuerzos dieléctricos en los aislamientos ni
producción de armónicos.
281
BIBLIOGRAFIA
APARICIO Marzo José Luis. Criterios de diseño de convertidores estáticos
para accionamientos regulados en corriente alterna con motores de
inducción. Saber Hoy 1989.
CHAPMAN Stephen J. Maquinas eléctricas. Mcgraw-Hill 1993.
CHAUPRADE Robert. Control electrónico de los motores de corriente alterna.
Gustavo Gili 1983.
CHERTA Cortés Manuel. Curso moderno de maquinas eléctricas rotativas.
Tomos II y III. Técnicos Asociados 1974.
IVANOV-Smolenski. Maquinas eléctricas. Tomos I, II y III. Mir Moscú 1984.
LEONHARD Werner. Control of Electrical Drives. EESES 1985.
282
MERINO Ascarraga José María. Convertidores de frecuencia para motores
de corriente alterna. Funcionamiento y aplicaciones. Mcgraw-Hill 1988.
MICROMASTER, MIDIMASTER. Manual de instrucciones de servicio.
SIEMENS 1995.
MORERA hernandez Mario. Accionamiento electrónico automatizado I.
Pueblo y Educación 1988.
RASHID Muhamad. Electrónica de potencia, circuitos, dispositivos y
aplicaciones. Prentice-Hall hispanoamericana 1993.
RECTIVAR 4 serie 44. Reversing Variable Speed Controllers for D.C Motors.
Users manual. TELEMECANIQUE 1994.
SEGUIER Guy. Electrónica de potencia. Gustavo Gili 1976.
WILDI Theodore. Electrical Machines, Drives, and Power Systems. Prentice-
Hall International Edition 1991.
283
ANEXOS
PRACTICAS SUGERIDAS DE LABORATORIO CON DRIVES PARA
MOTORES DE CORRIENTE CONTINUA Y CORRIENTE ALTERNA
INTRODUCCION
Las practicas de laboratorio sugeridas en estos anexos se proponen como
la conclusión al trabajo teórico anteriormente realizado y surgen de la
necesidad de comprobar que tan aproximados son los resultados
obtenidos en este texto. La realización de estas practicas requieren el
uso de algunos elementos con los cuales desafortunadamente no se pudo
contar en el laboratorio de maquinas eléctricas de la corporación
universitaria AUTONOMA DE OCCIDENTE, pero queda claro que en la
fecha se esta estudiando junto con el GRUPO DE ESTUDIO DE
MAQUINAS ELECTRICAS la posibilidad de adquirirlos para que nuestra
institución se ponga al margen en un área de tanta importancia en la
ingeniería eléctrica como lo es la variación de velocidad de motores de
284
corriente directa y especialmente la variación de velocidad de motores de
inducción por el método de campo orientado.
En las practicas de laboratorio con drives de DC y AC el objetivo
fundamental es conocer la versatilidad y la forma con que estos equipos
electrónicos responden a las exigencias de torque, potencia, velocidad
que cualquier tipo de carga impone al motor.
Además de esto, los convertidores electrónicos o drives deben estar
capacitados para proteger al motor, cuando éste se encuentre trabajando
en condiciones inapropiadas. Igualmente deben proporcionarle al motor
la flexibilidad de trabajar en cualquier cuadrante de operación cuando el
proceso lo exija.
Los realizadores de este proyecto de tesis tenían como propósito la
implementación de practicas con motores de corriente directa para los
cuales se requería el uso de un drive que permitiera el funcionamiento
del sistema en los cuatro cuadrantes de operación con frenado
regenerativo hacia la red de potencia. Desafortunadamente el drive1 con
el que se contó, no permitió esta maniobra y tampoco se contó con una
unidad de realimentación de la velocidad o Tacogenerador. Bajo este tipo
de condiciones solo se realiza el planteamiento de la practica que este
1 RECTIVAR 4 Serie 44 de Telemecanique
285
grupo considera mas adecuada para el drive antes mencionado y se
plantea lo que se podría hacer con un drive mejor acondicionado.
Con relación a las practicas realizadas con el drive de corriente alterna1,
tampoco pudieron ser llevadas a cabo practicas en los cuatro cuadrantes
de operación del sistema. Aunque el equipo presenta una opción para
frenado regenerativo, no permite la devolución de energía hacia la red si
no que este tipo de frenado se realiza a través de una resistencia de freno
que se adecua al equipo.
Las practicas con drives de motores de corriente alterna se limitaron a la
toma de datos de voltaje frecuencia y velocidad mecánica del rotor, el cual
estaba acoplado a una carga de tipo lineal como lo es un generador de
DC de corriente continua, realizando respectivas gráficas de cada
variable.
Por ultimo se recomienda al área de maquinas de ingeniería eléctrica la
consecución de un sensor de torque digital, sondas para medición de alto
voltaje para osciloscopio digital TEKTRONIX TDS-220, y con el fin de
actualizar el laboratorio de maquinas en esta área, la implementación de
software, tarjetas de adquisición de datos u otro tipo de sistema de
medición automatización y muestreo.
1 MICROMASTER Modelo MM400-2 de SIEMENS
286
PRACTICAS SUGERIDAS DE LABORATORIO CON DRIVES PARA EL
MANEJO DE MOTORES DE CORRIENTE CONTINUA
El Drive de motor de corriente continua con el que se cuenta en el
laboratorio de Maquinas Eléctricas de la Universidad Autónoma de
Occidente, como se mencionó anteriormente, es un RECTIVAR 4 Serie
44 RTV-44U60M de la empresa Telemecanique. Este dispositivo cuenta
con un rectificador monofásico dual de onda completa en configuración
espalda con espalda que conectado a la maquina de corriente continua, le
permite la variación del valor del voltaje promedio de armadura mediante
el control del tiempo de conducción de cada tiristor. El devanado de
campo va conectado con un rectificador sencillo que se puede configurar
como rectificador de media onda o de onda completa, en otro caso se
puede alimentar el devanado de campo mediante una fuente externa de
corriente directa.
Con el objeto de mantener constante la velocidad del motor a pesar de las
variaciones propias de la carga, debe acoplarse al eje del motor un
tacogenerador que realimenta al sistema de control de velocidad con una
señal de tensión de salida o en otro de los casos conectar a él, una tarjeta
especial para realimentar la velocidad del motor por medio del voltaje
autoinducido de armadura. Cuando se aumenta la carga en el eje del
motor, la velocidad del motor tiende a reducirse y por tanto la tensión de
287
salida del tacogenerador. Para recobrar el valor de velocidad es necesario
incrementar el valor de corriente a través de la armadura. Esta operación
es automáticamente efectuada por el Drive incrementando el valor del
voltaje promedio de salida hacia la armadura.
Cuando el aumento de carga es lo suficientemente grande como para que
haga que la corriente de armadura intente sobrepasar el valor de corriente
limite establecido, el dispositivo permite el decrecimiento de la velocidad
del motor a costa de la limitación de la corriente hasta el valor
determinado por el usuario.
Como ya se mencionó, a falta de uno de estos dispositivos fue necesario
plantear estas practicas a manera de sugerencia, con el fin de que sean
realizadas cuando todo el equipo y dispositivos necesarios sean
adquiridos.
1. VISUALIZACIÓN DE LAS SEÑALES DE TENSIÓN Y CORRIENTE
OFRECIDAS POR EL DRIVE RECTIVAR 4 SERIE 44 A LOS
TERMINALES DE ENTRADA DE ARMADURA DE UN MOTOR DE
D.C.
Esta es una practica sencilla en la que se conecta un osciloscopio
(preferiblemente el oscilloscopio digital TEKTRONIX TDS 220 con que
288
cuenta la Universidad) entre los terminales de la armadura de un motor
D.C con el fin de observar la señal de salida de tensión del Drive.
La ventaja que ofrece un osciloscopio digital es que en el pueden verse
datos numéricos de la señal medida, como lo es el valor promedio de
tensión que esta llegando al motor. De igual forma puede observarse el
valor de corriente a través de la armadura del motor, pero en este caso
debe tenerse precaución de que debe conectarse en serie con la
armadura y que la corriente hacia el motor no sea demasiado grande ya
que podría no solo dañar la sonda de medición, sino también al mismo
equipo. Se recomienda que esta practica sea realizada con el motor en
vacío o que se disponga de una sonda especial de medición de corriente
que permita al menos 6 amperios que es el valor máximo de corriente
entregada por el Drive.
2. FUNCIONAMIENTO DE UN SISTEMA DRIVE MOTOR CARGA
LINEAL
Esta practica puede ser dividida en dos partes, una de las cuales podría
corresponder a la verificación de regulación de velocidad cuando el motor
funciona con un valor de corriente por debajo del establecido como
corriente limite. En este caso, la carga acopada al eje del motor es un
generador de corriente directa, el cual tiene acoplado a sus terminales de
289
salida una resistencia cuyo valor varia haciendo que la velocidad del
motor tienda al decrecimiento.
El diagrama de control de la figura 1 representa la forma en que el Drive
regula la velocidad del motor. Como ya se mencionó, si se disminuye el
valor de la resistencia colocada en la salida del generador, la velocidad
en el eje del sistema tiende a reducirse, sin embargo, el tacogenerador
conectado en el eje del motor informa que ha habido un decrecimiento de
la velocidad y que es necesario incrementarla. El valor de la velocidad
aumentará siempre y cuando el limite de corriente establecido de
armadura no sea rebozado. De lo contrario este valor de corriente se
mantendrá a costa de un decremento en el valor de la velocidad (figura
2).
Si se realizara una gráfica de velocidad respecto a corriente se tendría
que hasta el valor de corriente limite, la velocidad del motor se mantiene
constante. De ahí en adelante a medida que se aumenta la carga en el
eje, el valor de corriente del motor se mantiene constante y la velocidad
del motor decrece.
Puede observarse con el osciloscopio digital, que el nivel de tensión
promedio del motor aumenta a medida que se disminuye el valor de
resistencia del generador, hasta que se continua elevando la carga por
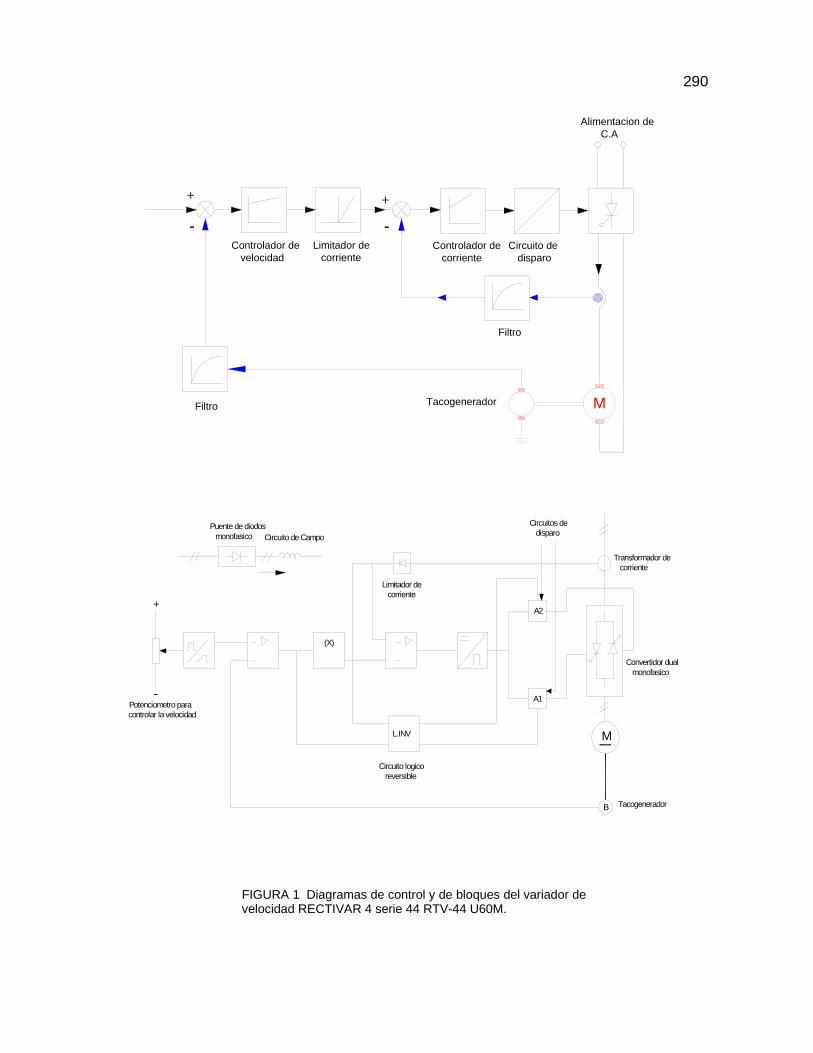
290
L.INV
Circuito logico reversible
(X)
Limitador de corriente
Circuitos de disparo
A2
A1
Transformador de corriente
Convertidor dual monofasico
M
B Tacogenerador
Puente de diodos monofasico Circuito de Campo
Potenciometro para controlar la velocidad
+
-
Controlador de velocidad
Controlador de corriente
Limitador de corriente
Circuito de disparo
Filtro
Filtro
Alimentacion de C.A
+
-
+
-
Tacogenerador M
FIGURA 1 Diagramas de control y de bloques del variador de velocidad RECTIVAR 4 serie 44 RTV-44 U60M.
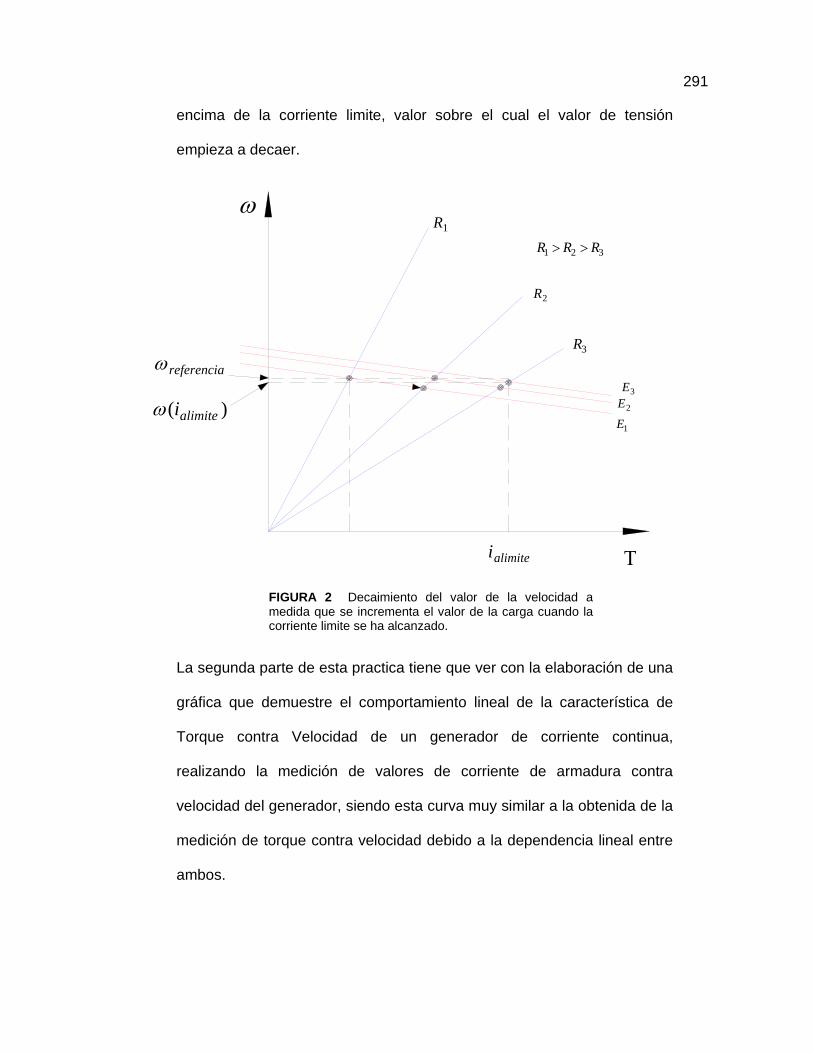
291
encima de la corriente limite, valor sobre el cual el valor de tensión
empieza a decaer.
La segunda parte de esta practica tiene que ver con la elaboración de una
gráfica que demuestre el comportamiento lineal de la característica de
Torque contra Velocidad de un generador de corriente continua,
realizando la medición de valores de corriente de armadura contra
velocidad del generador, siendo esta curva muy similar a la obtenida de la
medición de torque contra velocidad debido a la dependencia lineal entre
ambos.
referencia
)( alimitei
alimitei
1R
2R
3R
321 RRR
1E2E3E
FIGURA 2 Decaimiento del valor de la velocidad a medida que se incrementa el valor de la carga cuando la corriente limite se ha alcanzado.
292
La gráfica se obtiene dibujando los puntos de corriente de generador y
velocidad del sistema mientras se varia la velocidad del motor acoplado al
generador, el cual tiene conectado a sus terminales una resistencia de
valor constante. La gráfica obtenida debe tener la forma de una línea
recta que parte desde el origen y cuya pendiente depende exclusivamente
del valor de la resistencia acoplada según la siguiente ecuación:
k
RRi laa
Haciendo uso de un sistema medidor de torque en el eje del motor como
los que ofrece al firma norteamericana TRASDUCER TECHNIQUES, se
podría dibujar por un método convencional de mapeo, o siendo mas
ambiciosos por medio de un sistema de adquisición de datos. La
característica mecánica en el eje de un generador de D.C. esta
determinada por la ecuación:
2
k
RR la
3. SISTEMA DRIVE - MOTOR D.C. – CARGA LINEAL, FUNCIONANDO
EN DOS CUADRANTES DE OPERACIÓN DE UN SISTEMA TORQUE
CONTRA VELOCIDAD
Esta es una practica también sencilla en la que se desea poner a
funcionar un motor 1 en dos cuadrantes de operación de un sistema
mecánico Torque contra Velocidad. Para esto es necesario usar una
carga mecánica preferiblemente lineal, como lo es un generador de D.C.
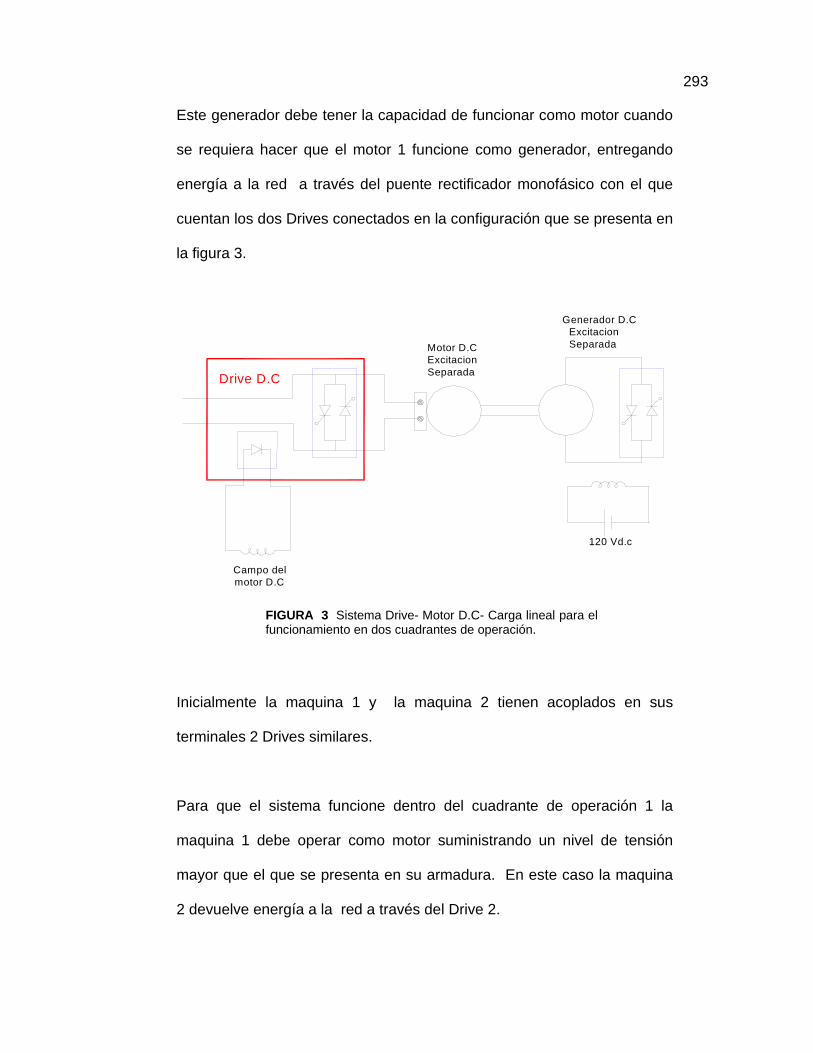
293
Este generador debe tener la capacidad de funcionar como motor cuando
se requiera hacer que el motor 1 funcione como generador, entregando
energía a la red a través del puente rectificador monofásico con el que
cuentan los dos Drives conectados en la configuración que se presenta en
la figura 3.
Inicialmente la maquina 1 y la maquina 2 tienen acoplados en sus
terminales 2 Drives similares.
Para que el sistema funcione dentro del cuadrante de operación 1 la
maquina 1 debe operar como motor suministrando un nivel de tensión
mayor que el que se presenta en su armadura. En este caso la maquina
2 devuelve energía a la red a través del Drive 2.
Campo del motor D.C
120 Vd.c
Drive D.C
Motor D.C Excitacion Separada
Generador D.C Excitacion Separada
FIGURA 3 Sistema Drive- Motor D.C- Carga lineal para el funcionamiento en dos cuadrantes de operación.
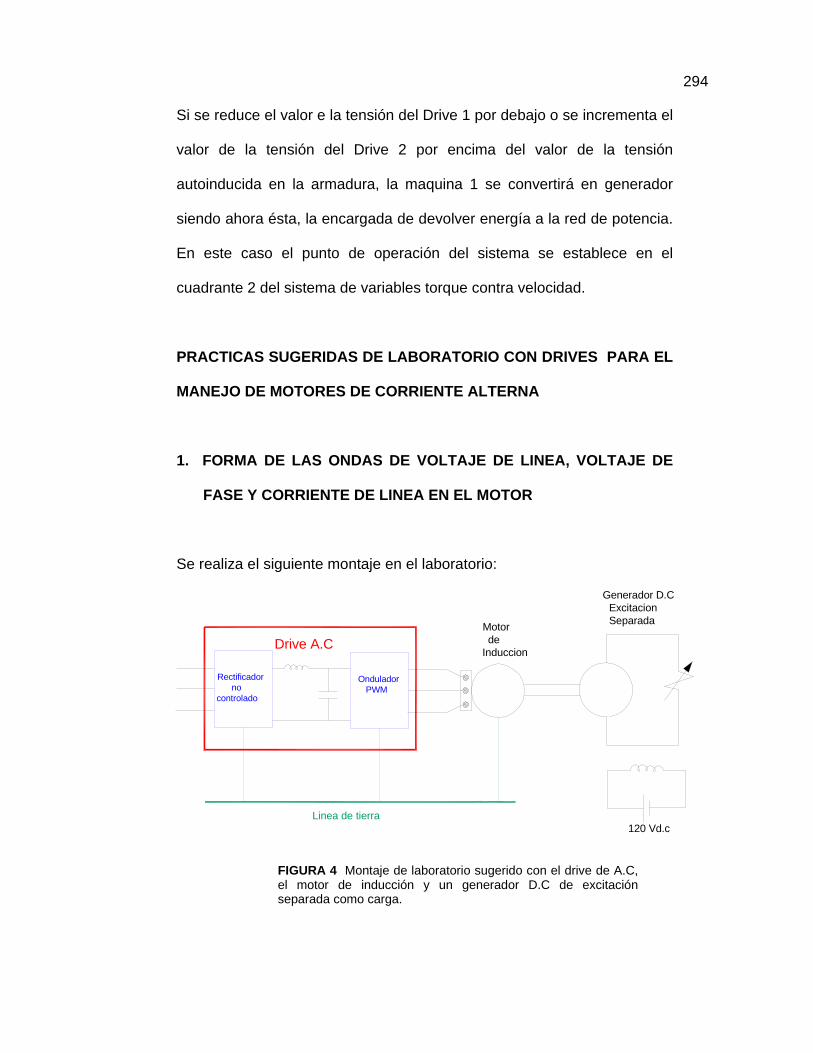
294
Si se reduce el valor e la tensión del Drive 1 por debajo o se incrementa el
valor de la tensión del Drive 2 por encima del valor de la tensión
autoinducida en la armadura, la maquina 1 se convertirá en generador
siendo ahora ésta, la encargada de devolver energía a la red de potencia.
En este caso el punto de operación del sistema se establece en el
cuadrante 2 del sistema de variables torque contra velocidad.
PRACTICAS SUGERIDAS DE LABORATORIO CON DRIVES PARA EL
MANEJO DE MOTORES DE CORRIENTE ALTERNA
1. FORMA DE LAS ONDAS DE VOLTAJE DE LINEA, VOLTAJE DE
FASE Y CORRIENTE DE LINEA EN EL MOTOR
Se realiza el siguiente montaje en el laboratorio:
Drive A.C
Rectificador nocontrolado
Ondulador PWM
Motor deInduccion
Generador D.C Excitacion Separada
120 Vd.cLinea de tierra
FIGURA 4 Montaje de laboratorio sugerido con el drive de A.C, el motor de inducción y un generador D.C de excitación separada como carga.
295
Para las practicas se emplea un motor de inducción trifasico de diseño
NEMA clase B, con los siguientes datos en placa:
Potencia nominal 0.248 KW
Corriente nominal 1.4 A
Frecuencia nominal 60 Hertz
Velocidad nominal 1725 R.P.M
Voltaje nominal 220 V
Un drive MICROMASTER de SIEMENS, para alimentar motores de 220 V
y hasta una capacidad de 5 H.P. Como se menciono en la introducción se
recomienda un osciloscopio con sondas para medición de alta tensión.
Como primera practica se sugiere la observación con el osciloscopio
digital de la forma de las ondas de salida de tensión de fase, tensión de
línea y corriente del drive hacia el motor. Ante la variación de frecuencia
del drive, se debe observar la variación del ancho de los pulsos de salida
y de la frecuencia de la onda generada por el sistema de modulación del
ancho de los pulsos PWM y también la variación de frecuencia de una
señal cuasi-senoidal que representa la corriente de línea del motor.
Esta practica no pudo ser realizada como anteriormente se mencionó
debido a la falta de una sonda de alta tensión en los osciloscopios de la
universidad, que permitiera la lectura de la señal de salida del drive entre
las fases del motor. Tampoco pudo ser realizada la medición de la señal
296
de corriente debido a que tampoco se contó con una pinza de medición
de corriente, la cual va acoplada al oscilloscopio.
Debe tenerse en cuenta que para la medición de tensión entre las fases
del motor, la sonda de medición no debe estar aterrizada por que de lo
contrario se producirá un cortocircuito debido a que la tensión de las fases
no es nula.
En el caso que la sonda del oscilloscopio este aterrizada es necesario
aislar la señal de salida de tensión del drive, pero esto requiere un
procedimiento complejo de acople que bien puede ser efectuada con un
transformador. No debe olvidarse que la frecuencia de la señal es alta y
por tanto un transformador convencional con núcleo de hierro no será
adecuado.
Podría medirse la salida de señal de tensión entre fase y tierra pero de
nuevo, la amplitud de la señal es muy alta para el equipo de medición. El
tipo de salida de ondas de tensión fase-fase y fase tierra esperadas se
muestran en la figura 5.
2. VARIACION DE LA FRECUENCIA DE UN MOTOR DE INDUCION EN
CARGA Y EN VACIO ALIMENTADO POR UN DRIVE
MICROMASTER DE SIEMENS
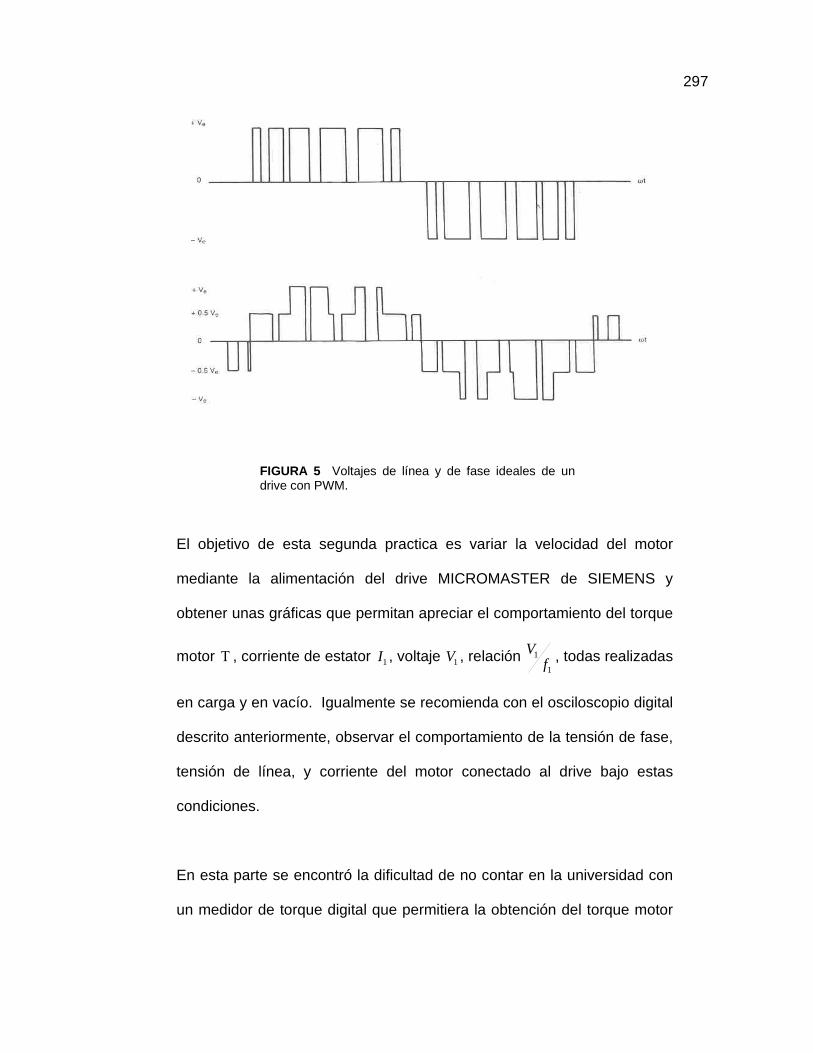
297
El objetivo de esta segunda practica es variar la velocidad del motor
mediante la alimentación del drive MICROMASTER de SIEMENS y
obtener unas gráficas que permitan apreciar el comportamiento del torque
motor , corriente de estator 1I , voltaje 1V , relación 1
1f
V , todas realizadas
en carga y en vacío. Igualmente se recomienda con el osciloscopio digital
descrito anteriormente, observar el comportamiento de la tensión de fase,
tensión de línea, y corriente del motor conectado al drive bajo estas
condiciones.
En esta parte se encontró la dificultad de no contar en la universidad con
un medidor de torque digital que permitiera la obtención del torque motor
FIGURA 5 Voltajes de línea y de fase ideales de un drive con PWM.
298
al variar la frecuencia. Se recomienda la adquisición de un medidor de
marca TRASDUCER TECHNIQUES.
El generador de excitación independiente utilizado como carga tiene en
placa los siguientes datos en placa:
Potencia nominal 0.248 KW
Voltaje nominal del campo 125 V
Corriente nominal de armadura 3.5 A
Velocidad nominal 1725 R.P.M
Los drives de A.C son muy empleados para las aplicaciones donde el
motor necesita variar la velocidad en un amplio rango. Como se
apreciaba en el capitulo 5, al motor en estas condiciones le será variada
la frecuencia 1f de alimentación de forma proporcionada con la amplitud
del voltaje. Este proceso se denomina variación de la velocidad por
medio de la relación hertzvolt . Esta relación se mantiene constante para
un rango de velocidades de 0 Hz hasta la frecuencia nominal estimada en
la placa del motor. Por encima de la frecuencia nominal esta relación
decrece como se vera mas adelante.
Para el motor utilizado en la practica la relación hertzvolt se define con
los datos nominales de placa del motor, de la siguiente forma:
hertzvolt67.3
60
220
299
Se debe recordar que al manejar cuidadosamente esta relación se puede
mantener la capacidad de carga del motor debido a que los parámetros
de voltaje y frecuencia relacionan otros parámetros como corriente
magnetizante mI , flujo mutuo m y el torque motor despreciando los
efectos de la resistencia de estator.
Del circuito equivalente del motor de inducción presentado en el capitulo 3
figura 3.15,se obtuvo la siguiente expresión para el flujo mutuo en el
capitulo 5:
'2Ik
1
´211
1
111
Cf
IIRV
Cf
IRV mm
Si se desprecia la caída de tensión en la resistencia causada por la
corriente de estator en vacío y en carga en valores de frecuencias muy
notorias, el flujo será:
1
10 Cf
Vm
Con lo cual la corriente magnetizante será:
mmm
m Lf
V
X
VI
1
11
2
Se debe considerar que en muy bajas frecuencias la caída de tensión en
la resistencia 1R es notable y debe ser compensado para mantener el flujo
de forma constante.
300
Por encima de la frecuencia nominal la tensión no se puede aumentar, ya
que el valor estimado en placa no puede ser superado. Esto ocasiona
que al solo poder aumentar la frecuencia permaneciendo constante el
voltaje el flujo magnético del motor disminuye perdiendo capacidad de
carga.
Con lo anterior se establecen dos zonas de operación para la variación de
la frecuencia en el motor, las cuales son manejadas por el drive. Una
zona llamada de Torque Constante que comprende desde 0 hasta 60
Hz. El torque máximo del motor es mantenido constante por la relación
Ctef
V
1
1 . La segunda zona llamada de Campo Debilitado o Potencia
Constante, ya que la velocidad aumenta en la misma proporción en que
disminuye el torque, esto se aprecia en la siguiente formula:
P
La segunda zona puede ser empleada en cargas que no exijan valores
elevados de torque a alta velocidad.
Se debe recordar que la corriente '2I representa la corriente del rotor
referida al estator, la cual indica la exigencia que la carga realiza al motor.
De esta corriente depende el nivel de torque desarrollado en el motor de
inducción.
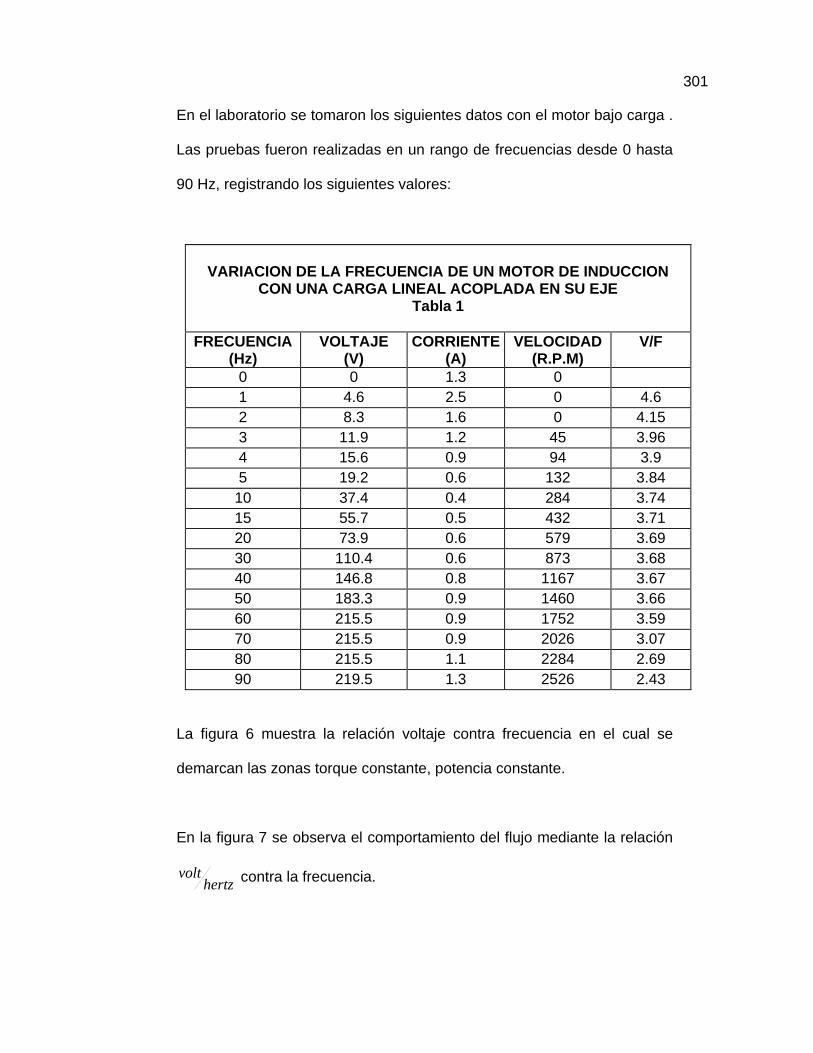
301
En el laboratorio se tomaron los siguientes datos con el motor bajo carga .
Las pruebas fueron realizadas en un rango de frecuencias desde 0 hasta
90 Hz, registrando los siguientes valores:
VARIACION DE LA FRECUENCIA DE UN MOTOR DE INDUCCION
CON UNA CARGA LINEAL ACOPLADA EN SU EJE Tabla 1
FRECUENCIA
(Hz) VOLTAJE
(V) CORRIENTE
(A) VELOCIDAD
(R.P.M) V/F
0 0 1.3 0 1 4.6 2.5 0 4.6 2 8.3 1.6 0 4.15 3 11.9 1.2 45 3.96 4 15.6 0.9 94 3.9 5 19.2 0.6 132 3.84 10 37.4 0.4 284 3.74 15 55.7 0.5 432 3.71 20 73.9 0.6 579 3.69 30 110.4 0.6 873 3.68 40 146.8 0.8 1167 3.67 50 183.3 0.9 1460 3.66 60 215.5 0.9 1752 3.59 70 215.5 0.9 2026 3.07 80 215.5 1.1 2284 2.69 90 219.5 1.3 2526 2.43
La figura 6 muestra la relación voltaje contra frecuencia en el cual se
demarcan las zonas torque constante, potencia constante.
En la figura 7 se observa el comportamiento del flujo mediante la relación
hertzvolt contra la frecuencia.
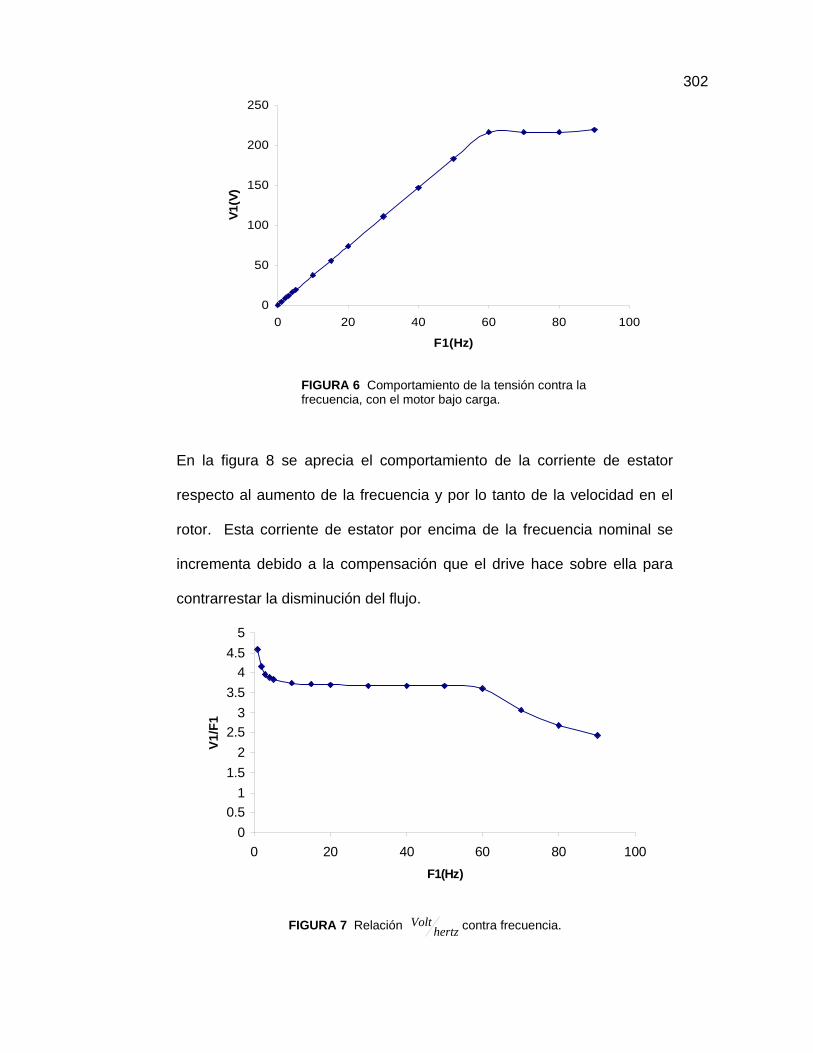
302
En la figura 8 se aprecia el comportamiento de la corriente de estator
respecto al aumento de la frecuencia y por lo tanto de la velocidad en el
rotor. Esta corriente de estator por encima de la frecuencia nominal se
incrementa debido a la compensación que el drive hace sobre ella para
contrarrestar la disminución del flujo.
0
50
100
150
200
250
0 20 40 60 80 100
F1(Hz)
V1(V
)
FIGURA 6 Comportamiento de la tensión contra la frecuencia, con el motor bajo carga.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0 20 40 60 80 100
F1(Hz)
V1/
F1
FIGURA 7 Relación hertzVolt contra frecuencia.
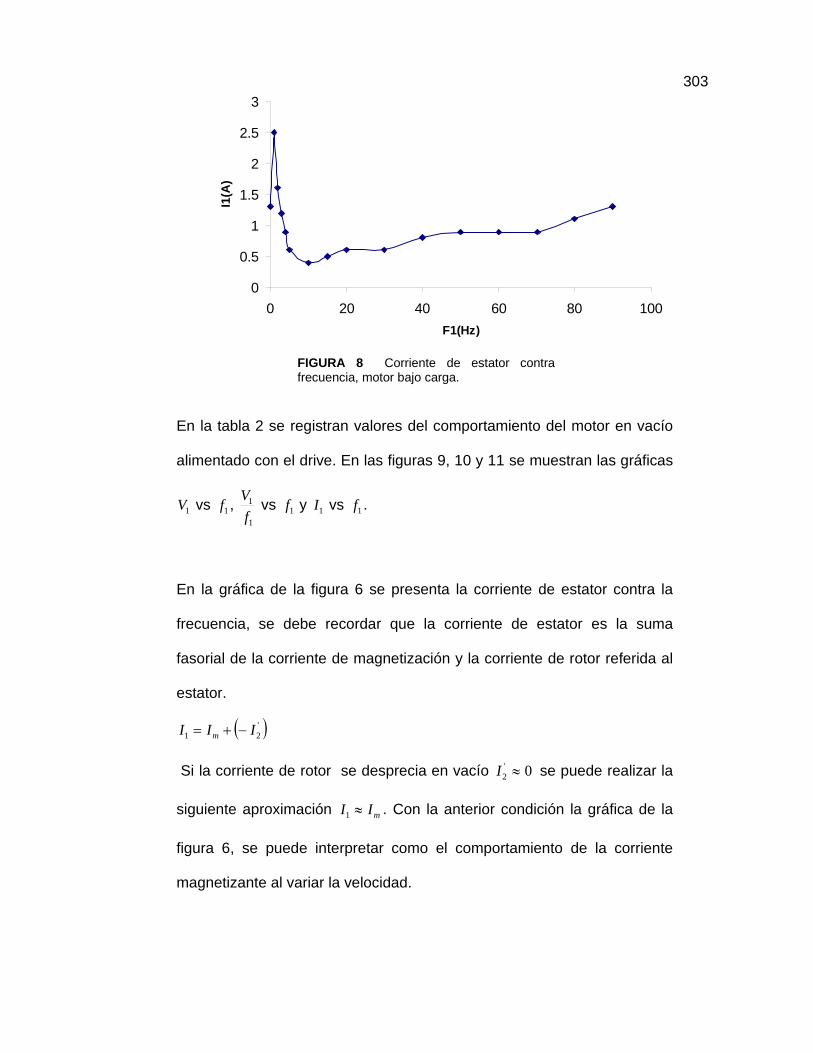
303
En la tabla 2 se registran valores del comportamiento del motor en vacío
alimentado con el drive. En las figuras 9, 10 y 11 se muestran las gráficas
1V vs 1f , 1
1
f
V vs 1f y 1I vs 1f .
En la gráfica de la figura 6 se presenta la corriente de estator contra la
frecuencia, se debe recordar que la corriente de estator es la suma
fasorial de la corriente de magnetización y la corriente de rotor referida al
estator.
'21 III m
Si la corriente de rotor se desprecia en vacío 0'2 I se puede realizar la
siguiente aproximación mII 1 . Con la anterior condición la gráfica de la
figura 6, se puede interpretar como el comportamiento de la corriente
magnetizante al variar la velocidad.
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100
F1(Hz)
I1(A
)
FIGURA 8 Corriente de estator contra frecuencia, motor bajo carga.
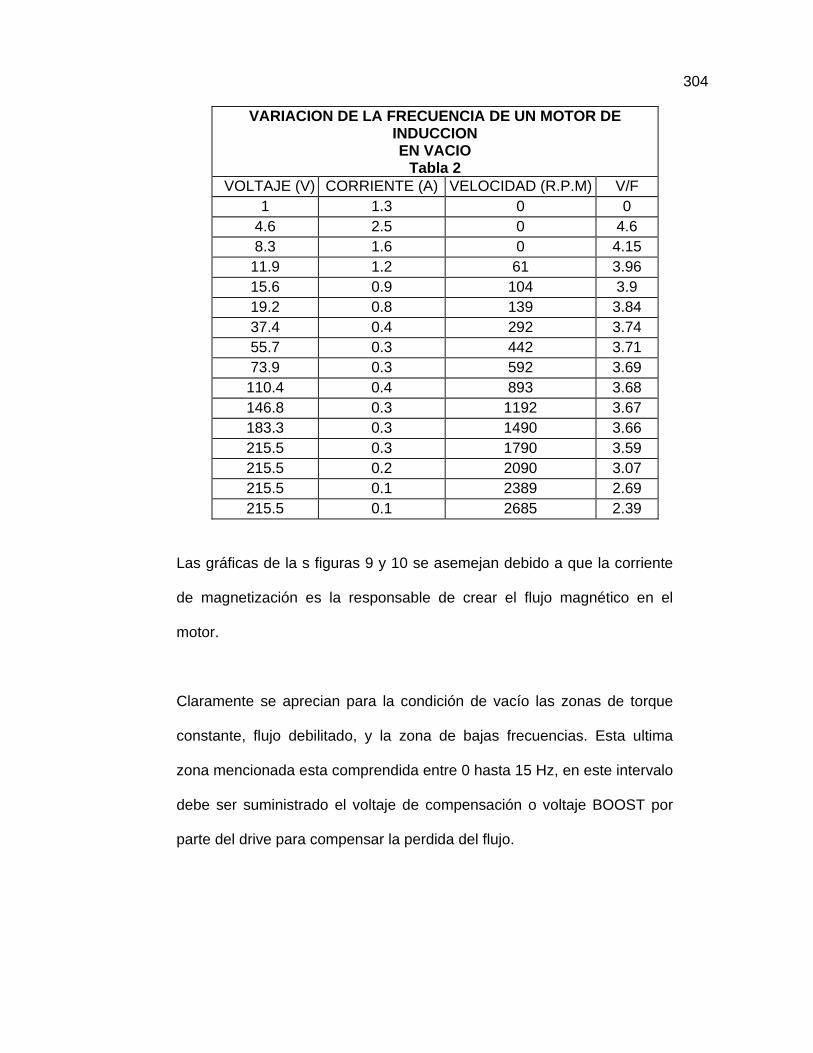
304
VARIACION DE LA FRECUENCIA DE UN MOTOR DE INDUCCION EN VACIO
Tabla 2VOLTAJE (V) CORRIENTE (A) VELOCIDAD (R.P.M) V/F
1 1.3 0 0 4.6 2.5 0 4.6 8.3 1.6 0 4.15 11.9 1.2 61 3.96 15.6 0.9 104 3.9 19.2 0.8 139 3.84 37.4 0.4 292 3.74 55.7 0.3 442 3.71 73.9 0.3 592 3.69 110.4 0.4 893 3.68 146.8 0.3 1192 3.67 183.3 0.3 1490 3.66 215.5 0.3 1790 3.59 215.5 0.2 2090 3.07 215.5 0.1 2389 2.69 215.5 0.1 2685 2.39
Las gráficas de la s figuras 9 y 10 se asemejan debido a que la corriente
de magnetización es la responsable de crear el flujo magnético en el
motor.
Claramente se aprecian para la condición de vacío las zonas de torque
constante, flujo debilitado, y la zona de bajas frecuencias. Esta ultima
zona mencionada esta comprendida entre 0 hasta 15 Hz, en este intervalo
debe ser suministrado el voltaje de compensación o voltaje BOOST por
parte del drive para compensar la perdida del flujo.
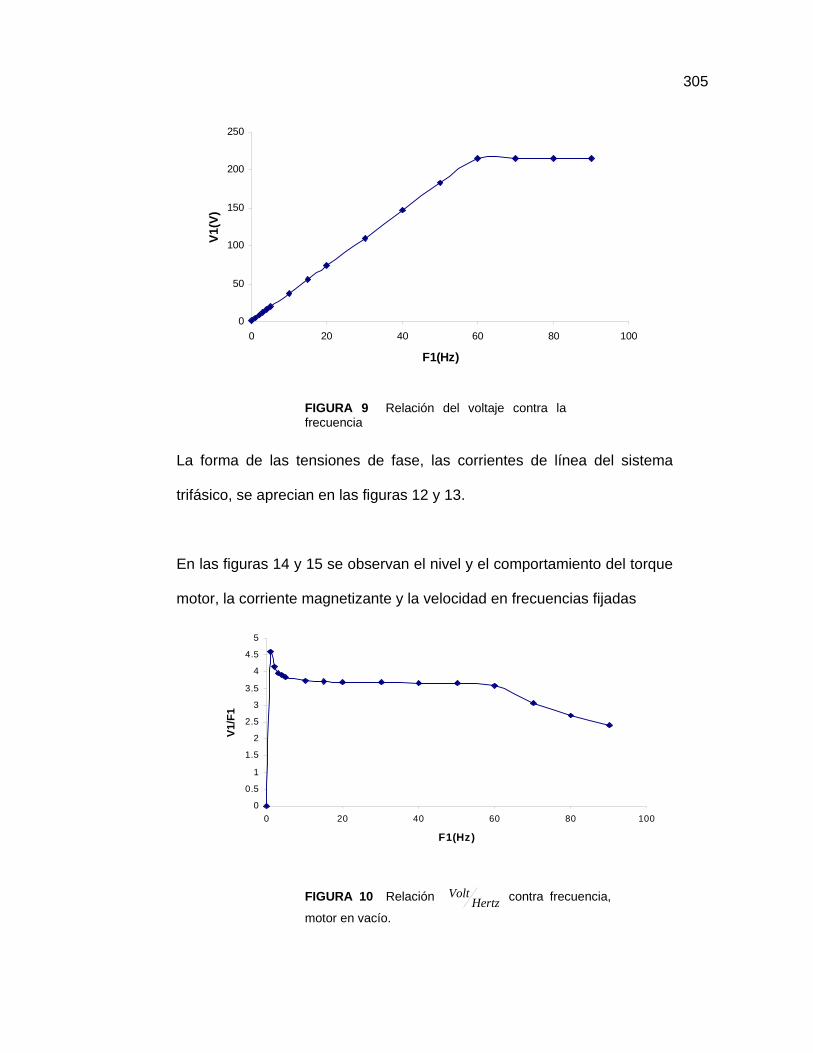
305
La forma de las tensiones de fase, las corrientes de línea del sistema
trifásico, se aprecian en las figuras 12 y 13.
En las figuras 14 y 15 se observan el nivel y el comportamiento del torque
motor, la corriente magnetizante y la velocidad en frecuencias fijadas
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0 20 40 60 80 100
F1(Hz)
V1/
F1
FIGURA 10 Relación HertzVolt contra frecuencia,
motor en vacío.
0
50
100
150
200
250
0 20 40 60 80 100
F1(Hz)
V1(
V)
FIGURA 9 Relación del voltaje contra la frecuencia
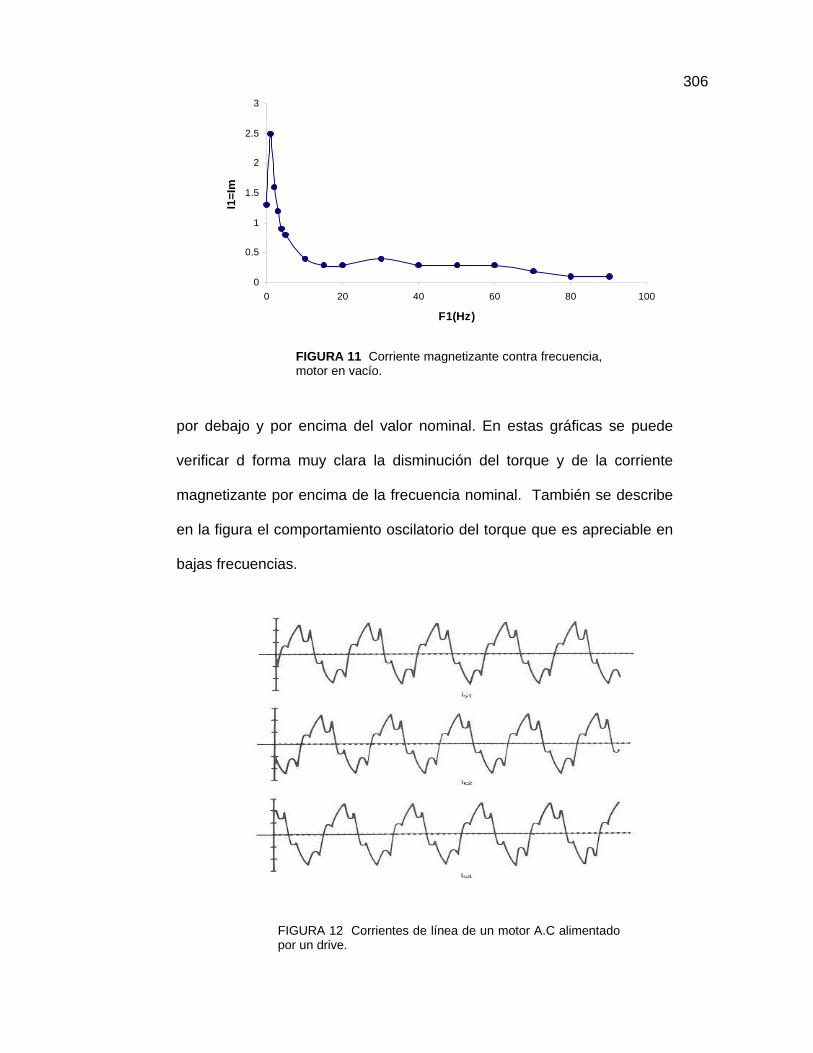
306
por debajo y por encima del valor nominal. En estas gráficas se puede
verificar d forma muy clara la disminución del torque y de la corriente
magnetizante por encima de la frecuencia nominal. También se describe
en la figura el comportamiento oscilatorio del torque que es apreciable en
bajas frecuencias.
0
0.5
1
1.5
2
2.5
3
0 20 40 60 80 100
F1(Hz)
I1=
Im
FIGURA 11 Corriente magnetizante contra frecuencia, motor en vacío.
FIGURA 12 Corrientes de línea de un motor A.C alimentado por un drive.
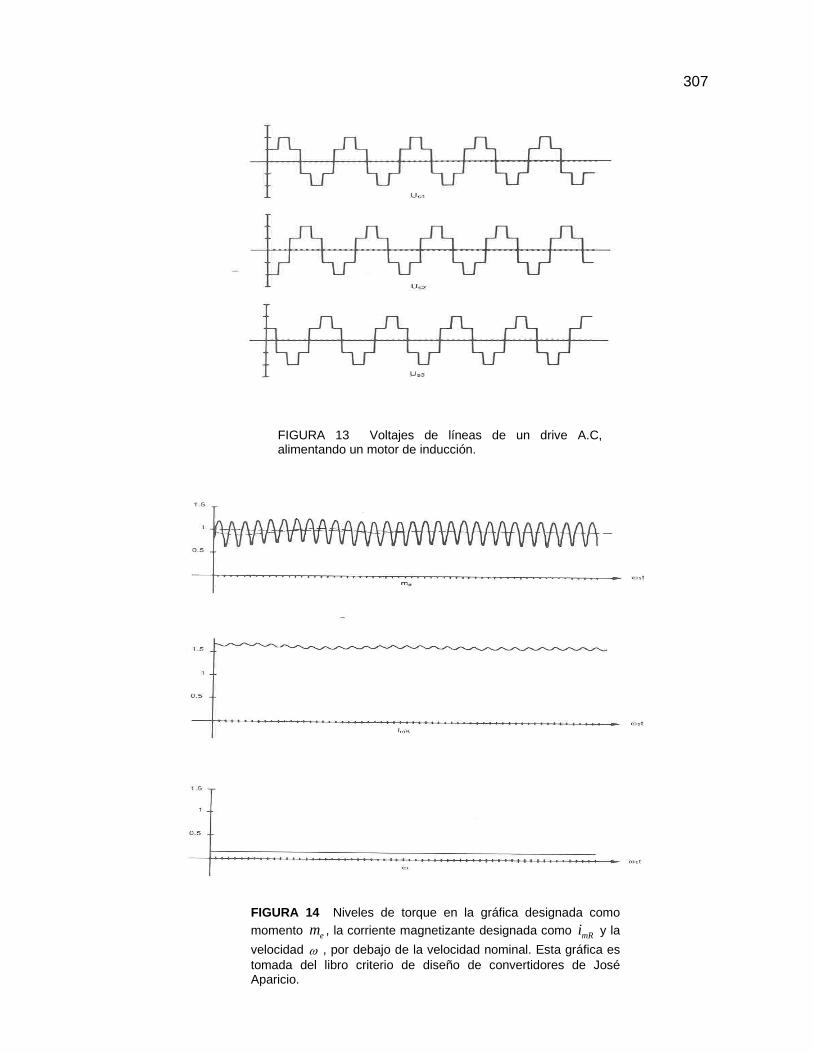
307
FIGURA 13 Voltajes de líneas de un drive A.C, alimentando un motor de inducción.
FIGURA 14 Niveles de torque en la gráfica designada como
momento em , la corriente magnetizante designada como mRi y la
velocidad , por debajo de la velocidad nominal. Esta gráfica es tomada del libro criterio de diseño de convertidores de José Aparicio.
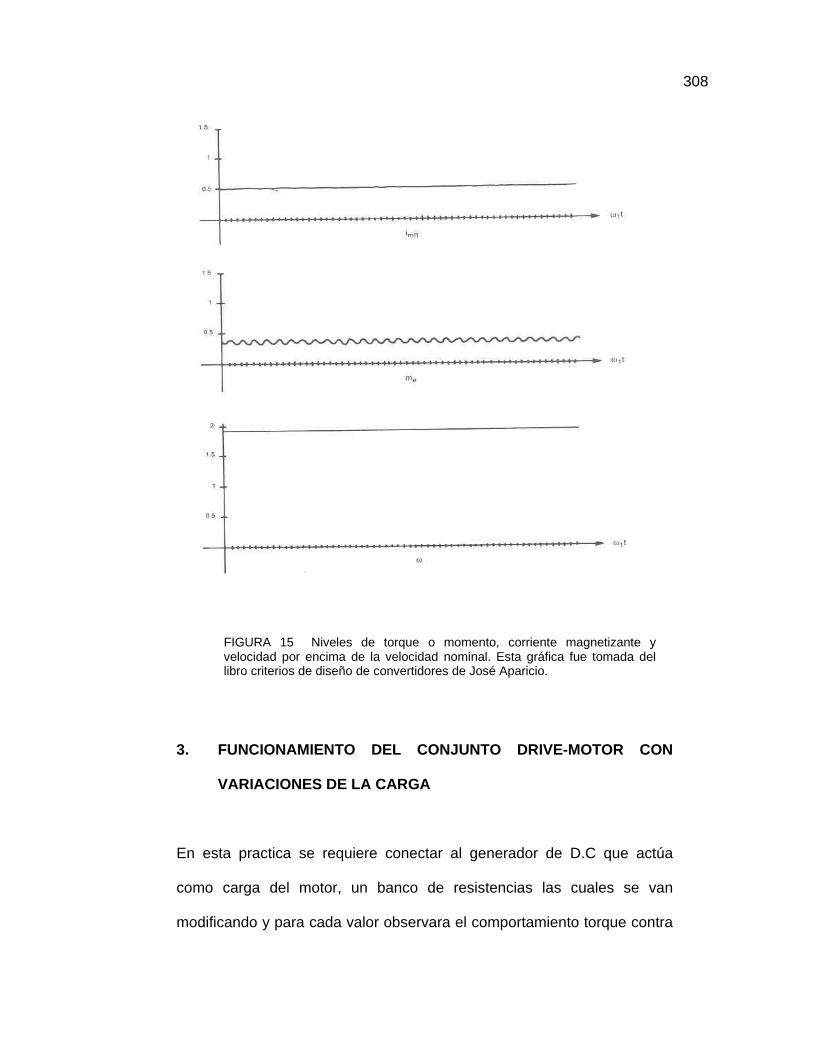
308
3. FUNCIONAMIENTO DEL CONJUNTO DRIVE-MOTOR CON
VARIACIONES DE LA CARGA
En esta practica se requiere conectar al generador de D.C que actúa
como carga del motor, un banco de resistencias las cuales se van
modificando y para cada valor observara el comportamiento torque contra
FIGURA 15 Niveles de torque o momento, corriente magnetizante y velocidad por encima de la velocidad nominal. Esta gráfica fue tomada del libro criterios de diseño de convertidores de José Aparicio.
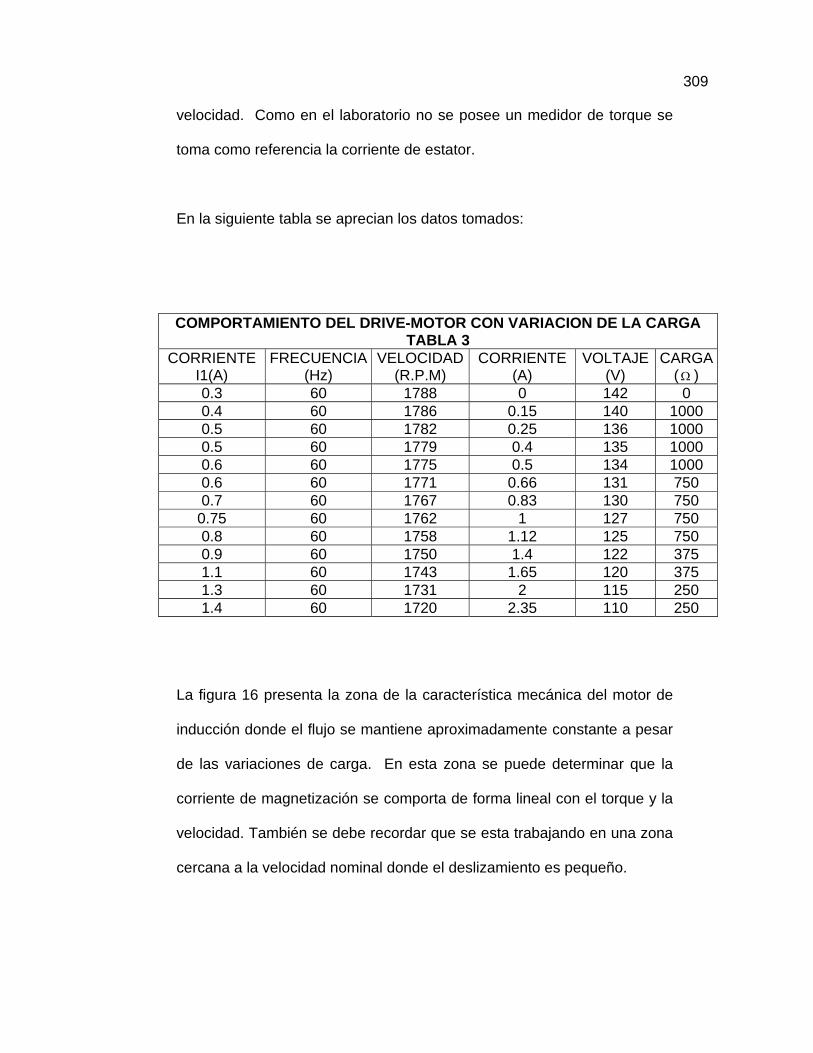
309
velocidad. Como en el laboratorio no se posee un medidor de torque se
toma como referencia la corriente de estator.
En la siguiente tabla se aprecian los datos tomados:
COMPORTAMIENTO DEL DRIVE-MOTOR CON VARIACION DE LA CARGA TABLA 3
CORRIENTE I1(A)
FRECUENCIA (Hz)
VELOCIDAD (R.P.M)
CORRIENTE (A)
VOLTAJE (V)
CARGA( )
0.3 60 1788 0 142 0 0.4 60 1786 0.15 140 10000.5 60 1782 0.25 136 1000 0.5 60 1779 0.4 135 1000 0.6 60 1775 0.5 134 1000 0.6 60 1771 0.66 131 750 0.7 60 1767 0.83 130 750
0.75 60 1762 1 127 750 0.8 60 1758 1.12 125 750 0.9 60 1750 1.4 122 375 1.1 60 1743 1.65 120 375 1.3 60 1731 2 115 250 1.4 60 1720 2.35 110 250
La figura 16 presenta la zona de la característica mecánica del motor de
inducción donde el flujo se mantiene aproximadamente constante a pesar
de las variaciones de carga. En esta zona se puede determinar que la
corriente de magnetización se comporta de forma lineal con el torque y la
velocidad. También se debe recordar que se esta trabajando en una zona
cercana a la velocidad nominal donde el deslizamiento es pequeño.
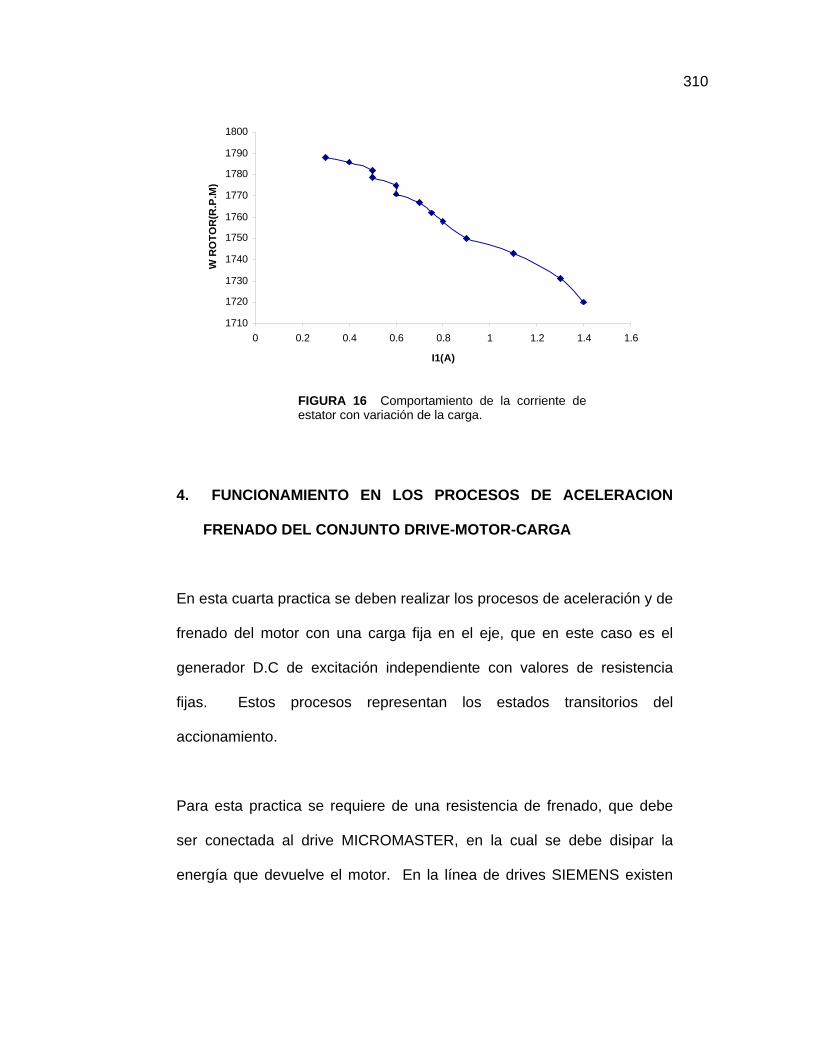
310
4. FUNCIONAMIENTO EN LOS PROCESOS DE ACELERACION
FRENADO DEL CONJUNTO DRIVE-MOTOR-CARGA
En esta cuarta practica se deben realizar los procesos de aceleración y de
frenado del motor con una carga fija en el eje, que en este caso es el
generador D.C de excitación independiente con valores de resistencia
fijas. Estos procesos representan los estados transitorios del
accionamiento.
Para esta practica se requiere de una resistencia de frenado, que debe
ser conectada al drive MICROMASTER, en la cual se debe disipar la
energía que devuelve el motor. En la línea de drives SIEMENS existen
1710
1720
1730
1740
1750
1760
1770
1780
1790
1800
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
I1(A)
W R
OT
OR
(R.P
.M)
FIGURA 16 Comportamiento de la corriente de estator con variación de la carga.
311
equipos llamados MASTERDRIVES los cuales poseen una unidad de
regeneración especial para este tipo de frenado.
Para iniciar la practica se debe acondicionar el drive para la aceleración
mediante la programación de una rampa, para la cual se debe fijar en el
drive el tiempo de aceleración que se requiera. En este se puede elegir el
rango de frecuencias en que desea acelerar. En la figura 17 se aprecia
una aceleración desde 15 Hz hasta 60 Hz, donde se puede apreciar como
varia la tensión aplicada al motor y la corriente exigida por el.
En la figura 18 se tiene el comportamiento de la velocidad, el torque y la
corriente magnetizante. Aquí se puede observar el incremento de la
velocidad y el torque, mientras que la corriente magnetizante se mantiene
constante debido a la relación Ctef
V
1
1 .
El proceso de frenado se puede realizar en primer lugar con el
acondicionamiento del respectivo parámetro del drive que prepare al
equipo para frenar con resistencia. El rango de frecuencias para este
proceso puede comprender entre 60 Hz hasta 20 Hz. En la figura 19 se
detalla de nuevo la tensión y la corriente del motor. La corriente en la
practica se puede medir con unas pinzas especiales de medición a altas
frecuencias o en su defecto medir la caída de tensión en una resistencia
de carbón conectada en serie con cada fase del motor. La gráfica
obtenida se puede asemejar al comportamiento de la corriente de línea.
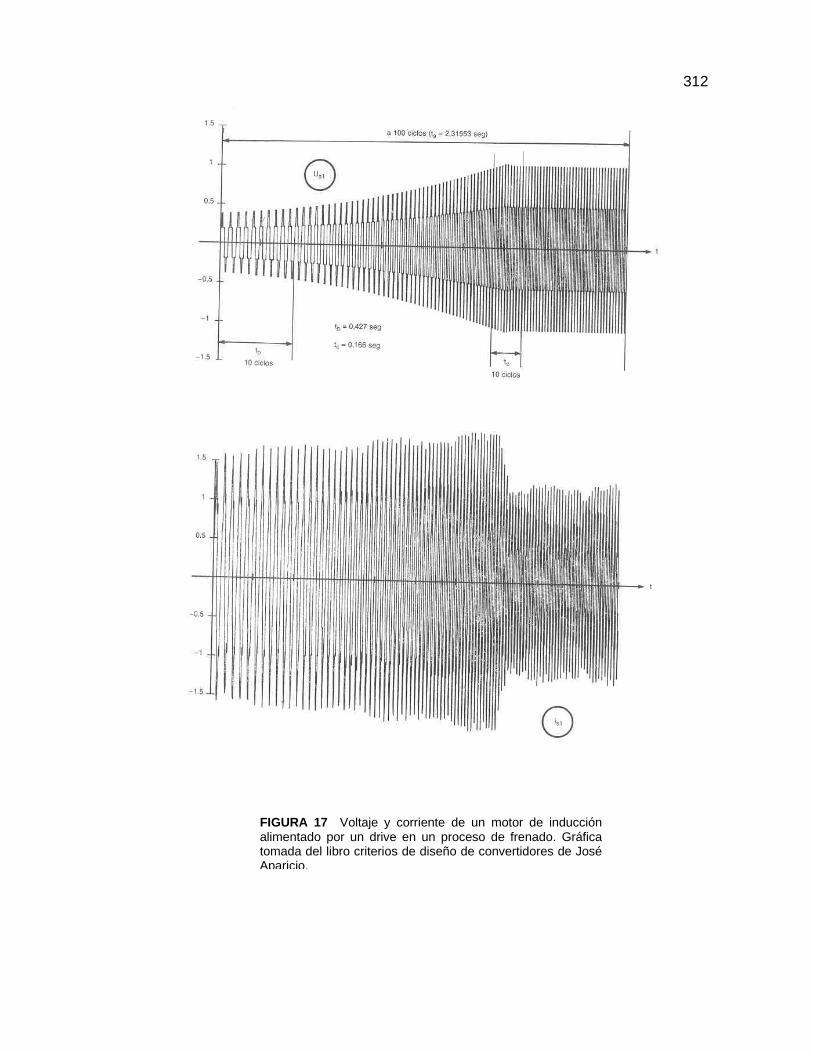
312
FIGURA 17 Voltaje y corriente de un motor de inducción alimentado por un drive en un proceso de frenado. Gráfica tomada del libro criterios de diseño de convertidores de José Aparicio.
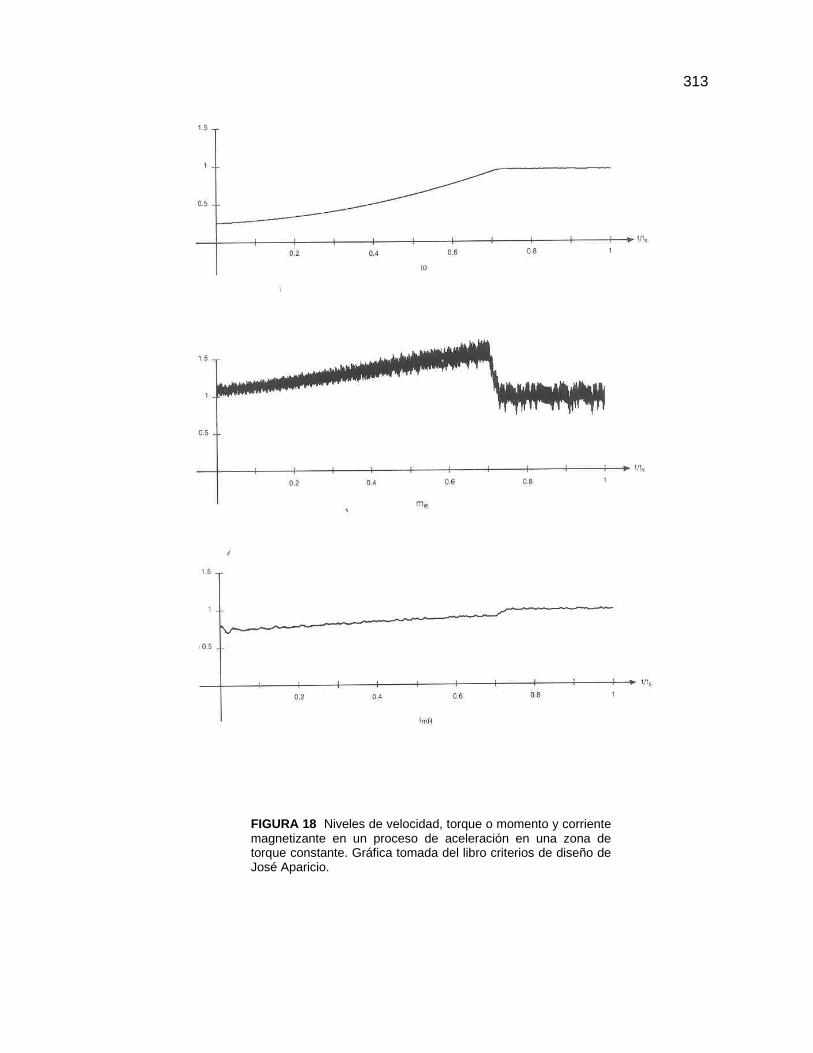
313
FIGURA 18 Niveles de velocidad, torque o momento y corriente magnetizante en un proceso de aceleración en una zona de torque constante. Gráfica tomada del libro criterios de diseño de José Aparicio.
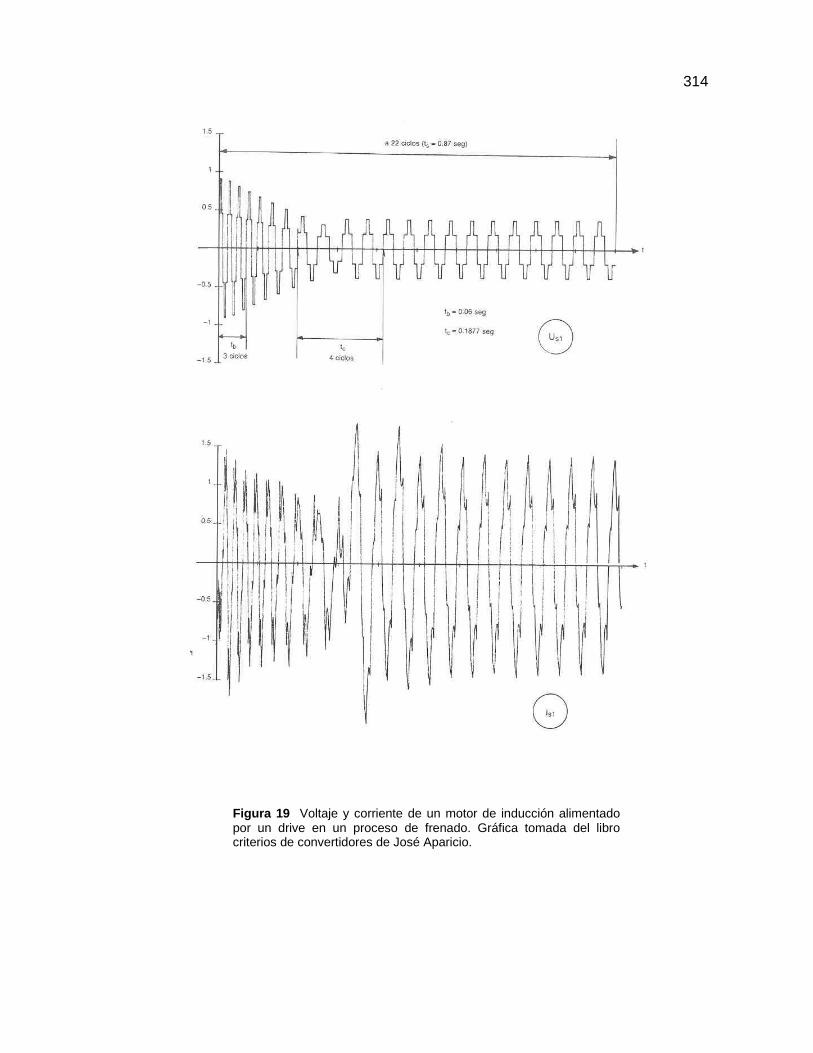
314
Figura 19 Voltaje y corriente de un motor de inducción alimentado por un drive en un proceso de frenado. Gráfica tomada del libro criterios de convertidores de José Aparicio.
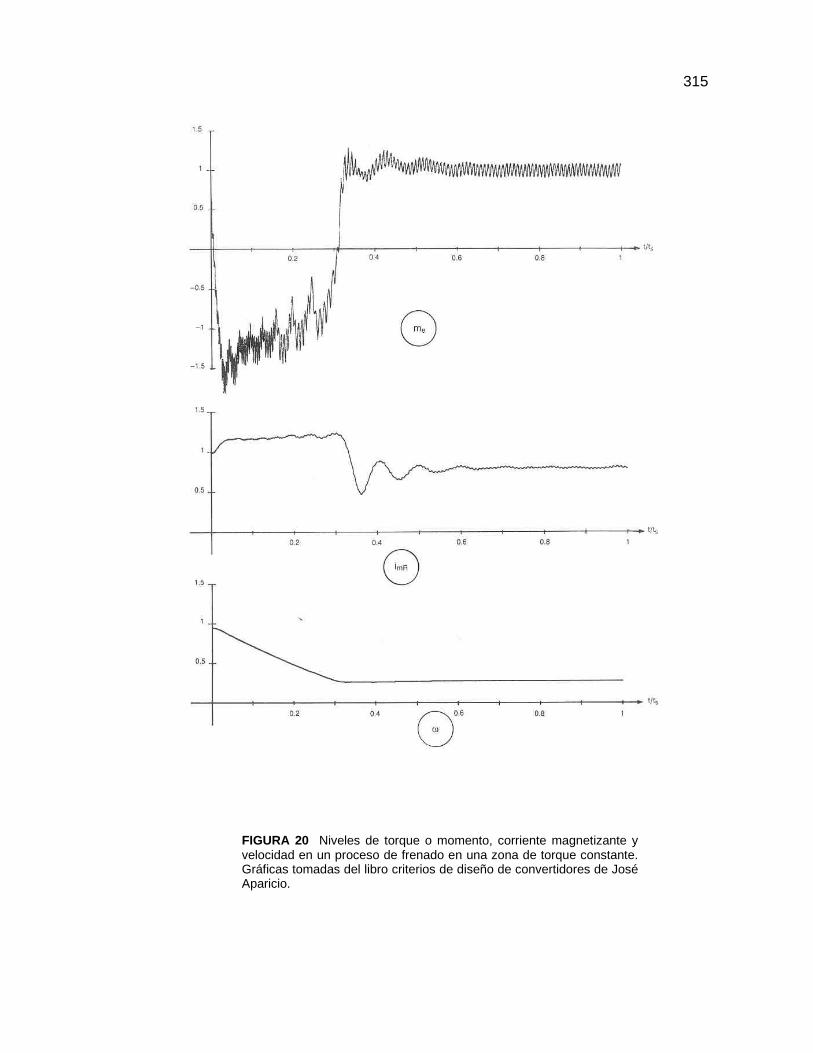
315
FIGURA 20 Niveles de torque o momento, corriente magnetizante y velocidad en un proceso de frenado en una zona de torque constante. Gráficas tomadas del libro criterios de diseño de convertidores de José Aparicio.
316
En la gráfica de la figura 20 es importante apreciar el torque de frenado el
cual es grande debido a que este es el resultado del torque de carga y el
torque motor que ha cambiado de signo. También se puede analizar en
esta gráfica el descenso de la velocidad y la pequeña oscilación de la
corriente de magnetización cuando se estabiliza el torque del motor en su
estado inicial, aun así el flujo magnético tiende a mantenerse constante.
En la practica de frenado se puede parar el motor mediante la inyección
de corriente continua al motor mediante el parámetro 073 del drive
MICROMASTER, el cual tiene la opción de aplicar una corriente desde 0
hasta 250% del valor de corriente nominal de A.C, igualmente en esta
parte se recomienda observar con el osciloscopio digital y el medidor de
torque los comportamientos de voltaje, corriente, torque, velocidad, y
corriente magnetizante. Otra opción para frenar el motor es empleando
una rampa de desaceleración, la cual puede ser ajustada en tiempo
mediante el parámetro 003 del MICROMASTER.
Entre los métodos de frenado puede establecerse una tabla comparativa
en el tiempo que requiere cada método, y las condiciones a favor y en
contra que representa cada uno para el accionamiento.





























