Embed Size (px)
Citation preview

EKT 222
MICROPRESSOR SYSTEM
LAB 1 :
INTRODUCTION TO 8085
MICROPROCESSOR TRAINING
KIT MTK-85
Revision 2019

EKT222 Microprocessor System
UniMAP 2
LAB 1:INTRODUCTION TO 8085
MICROPROCESSOR TRAINING
KIT MTK-85
Objectives:
1) To familiarize with the 8085 training kit. 2) To discover features and functions available in the system. 3) To utilize the board to analyze simple code executed in the board. 4) To write and compile simple assembly code in host PC and download
the code to board via terminal serial software and execute.
Equipment: 1) Computer station with Windows OS with MY1 8085 Simulation
software and terminal emulation software, Tera Term Pro Ver. 2.3. 2) 8085 Microprocessor Training Kit MTK-85.
1. INTRODUCTION TO 8085 MICROPROCESSOR TRAINING KIT.
The basic components of the 8085 Microprocessor Training Kit board consist of
M80C85AP-2 4MHz 8-bit Intel Microprocessor
32 kB Monitor ROM -27C256
32kB User RAM -HM62256B
Simple I/O Port: 8-bit GPIO built with 74LS175 D-type F-F and 74LS126
Tristate buffer
Programmable Ports: two 8255 chips, system and user ports
Programmable Counter: 8254
UART: 16C550 compatible
Monitor Program
The circuit diagram for this system is as Appendix 1. The board connects to the
computer through its serial port. The monitor program that resides in the EPROM controls
overall system operation.
1.1 Memory and I/O Map
This Training Kit has two different address maps; Memory Map and I/O Map. The
Development Kit can address up to 64K of memory devices and 255 addresses

EKT222 Microprocessor System
UniMAP 3
for I/O devices. Please refer to MTK-85 manual (page 34-37) for detail description of
Memory and I/O configurations.
1.1.1 Memory Map
Figure 1 shows the memory allocation and map for the Development Kit board. The
32K of memory spaces (0000H - 7FFFH) that resides in EPROM contains the
monitor program code for the system. Whilst the memory spaces from the address
range of 8000H – FFFFH (32K) that resides in the RAM provide the memories for
user program, interrupt vectors, data and stack (Default Setting).
Figure 1: Memory Map
1.1.2 I/O Map
General purpose I/O is available the address of 00H. Two Programmable Peripheral
Interface (PPI) 8255 and a Universal Asynchronous Receiver/Transmitter (UART)
16C550 are also available in the system. The devices have a unique address, which
decodes them as isolated I/O’s. There is one Intel Programmable Interval Timer 8254
available. Besides, there is a direct BUS interfaced 20x4 Text LCD. Figure 2 shows
the I/O map for the 8085 Training Kit Board.

EKT222 Microprocessor System
UniMAP 4
Figure 2 : I/O Map
2. INPUT AND OUTPUT
The Training Kit Board have input and output devices as the following:
a. GPIO - provides 4-bit output port using D type F-F, 74LS175 and 4-bit input port
using tristate buffer, 74LS126. The address is 00 for both ports. The low-nibble
D0-D3 is output port. The higher-nibble D4-D7 is input port.
System Programmable Port 8255 - The board provides a system programmable
parallel port, 8255. I/O address from 10H to 13H map the 8255’s registers as
shown in Table 1.
Table 1
10H PORTA
11H PORTB
12H PORTC
13H CONTROL PORT

EKT222 Microprocessor System
UniMAP 5
b. User Programmable Port 8255 - The board provides a user programmable
parallel port, 8255. I/O address from 30H to 33H map the 8255’s registers as
shown in Table 2.
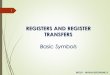
The 8255 Programmable Peripheral Interface (PPI) as shown in Figure 3 is a
general-purpose interface device, which is widely used in microprocessor design.
It contains three independent 8 bit ports named Port A, B and C. Port A and B can
be programmed as either input or output (all eight line must be same), while port
C is split into two 4 bit halves (Port C upper (PC4-PC7) and Port C lower (PC0-
PC3)) that can be separately programmed as input or output. Figure 3 shows the
internal architecture and pin-out for the 8255 Programmable Peripheral Interface
(PPI).
Figure 3
Four registers control the operations of the PPI and four addresses locations map all
the registers in the 8085 Training Kit as shown below:
Table 2
ADDRESS PORT
30H PORTA
31H PORTB
32H PORTC
33H CONTROL PORT

EKT222 Microprocessor System
UniMAP 6
Table 3 shows the details of the signals involved in controlling the PPI.
Table 3: Signals Controlling PPI.
A0 A1 CS RD=0 WR=0 0 0 0 Port A to Data bus Data bus to Port A
0 1 0 Port B to Data bus Data bus to Port B
1 0 0 Port C to Data bus Data bus to Port C
1 0 - - Data bus to Control Register
The control register is used to configure the PPI into a variety of operation
modes. There are three basic modes:
mode 0 : basic input/output
mode 1 : strobe input/output
mode 2 : bidirectional bus
We will only concentrate at mode 0. Refer to ‘Intel Microsystems Component
Handbook’ for further descriptions about mode 1 and 2. Mode 0 provides simple
input output operations with no handshaking. This means that data either to or from
the port does not depend on other signal for data transfer. To configure the PPI, sent
a control word to the control register. Table 4 summarized the control word format.
Table 4: Control Word
bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0 1 Port A and upper half of Port C Port B & lower half of
Port C MODE Port A Port C UPPER
MODE Port B Port
CLOWER

EKT222 Microprocessor System
UniMAP 7
Format Mode Definition Control Byte: Indicate by bit b7=1.
Port A and upper half of Port C (Group A)
Bit b3 to bit b6 control the mode and direction of Group A
b6 b5 mode operation
0 0 mode 0
0 1 mode 1
1 0 mode 2
b4 Port A direction
0 OUTPUT
1 INPUT
b3 upper half of Port C direction,
0 OUTPUT
1 INPUT
Port B and lower half of Port C (Group B)
Bit b0 to bit b2 control the mode and direction of Group B
b2 Mode operation
0 mode 0
1 mode 1
b1 Port B direction
0 OUTPUT
1 INPUT
b0 Lower half of Port C direction
0 OUTPUT
1 INPUT
c. Programmable Counter 8254 – This is a programmable counter. A clock signal from
CLOCKOUT or 2 MHz supplies to counter0 and counter1. I/O space from 20H to
23H map the internal registers of 8254 as shown in Table 5.
Table 5
ADDRESS REGISTER
20H COUNTER0
21H COUNTER1
22H COUNTER2
23H CONTROL REGISTER

EKT222 Microprocessor System
UniMAP 8
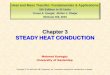
Figure 4.
The Intel 8254 is a counter/timer device as shown in Figure 4, designed to solve the
common timing control problems in microcomputer system design. It provides three
independent 16-bit counters, each capable of handling clock inputs up to 10 MHz.
All modes are software programmable. Figure 4 shows block diagram and pin
descriptions from the 8254 programmable interval timer. Three separate
timer/counters are provided (Courtesy: Intel Corporation). Table 5 and Table 6 show
details signals controlling the 8254 programmable counter.
Table 5
𝑪𝑺̅̅̅̅ 𝑹𝑫̅̅̅̅̅ 𝑾𝑹 A1 A0 Function
0 1 0 0 0 Write into Counter 0
0 1 0 0 1 Write into Counter 1
0 1 0 1 0 Write into Counter 2
0 1 0 1 1 Write into Control Word Register
0 0 1 0 0 Read from Counter 0
0 0 1 0 1 Read from Counter 1
0 0 1 1 0 Read from Counter 2
0 0 1 1 1 No Operation
1 X X X X No Operation
0 1 1 X X No Operation
Table 6

EKT222 Microprocessor System
UniMAP 9
A1 A2 SELECTS
0 0 COUNTER 0
0 1 COUNTER 1
1 0 COUNTER 2
1 1 CONTROL WORD
REGISTER
The control word format is shown in the following tables:
Control Word Format
D7 D6 D5 D4 D3 D2 D1 D0
SC1 SC0 RW1 RW0 M2 M1 M0 BCD
SC – Select Counter
RW – Read/Write
M-Mode
BCD – Binary Coded Decimal
D0 Function
0 Binary Counter 16 bit
1 Binary Coded Decimal (BCD) Counter (4 Decades)
SC1 SC0 SELECT
0 0 SELECT COUNTER 0
0 1 SELECT COUNTER 1
1 0 SELECT COUNTER 2
1 1 READ-BACK COMMAND
RW1 RW0 FUNCTION
0 0 COUNTER LATCH COMMAND
0 1 READ & WRITE LSB BYTE ONLY
1 0 READ & WRITE MSB BYTE ONLY
1 1 READ & WRITE LSB FIRST, THEN MSB
M2 M1 M0 FUNCTION
0 0 0 MODE 0
0 0 1 MODE 1
X 1 0 MODE 2
X 1 1 MODE 3
1 0 0 MODE 4
1 0 1 MODE 5

EKT222 Microprocessor System
UniMAP 10
d. Serial communication RS232 interface using UART 16C550 - A clock signal from
CLOCKOUT or 2 MHz supplies to the UART 16C550. I/O space from 40H to 47H
map the internal registers of UART 16C550 as shown in Table 7. A RS232 level
converter connects the UART input/output signal to RS232 DB9 connector. The
16550 UART (universal asynchronous receiver/transmitter) is an integrated circuit
designed for implementing the interface for serial communications. Block diagram
and pins configuration of the IC are shown in Figure 5.
Data bus & Control
Logic
Register Select Logic
Interrupt Control
Logic
Interconnect B
us Lines &
Contro
l Signals
Transmit FIFO
Register
Transmit Shift
Register
Receive FIFO
Register
Receive Shift
Register
Modem Control
LogicClock &
Baud rate Generator
DTR,RTS,OUT1,OUT2
SOUT
CTS,DSRDCD,SIN
INTRXRDYTXRDY
A0-A2ADS,
CS0-CS2DDIS
DO-D7,RD, RW
MR
XIN
,XO
UT
RCL
KB
AU
DO
UT
Figure 5: UART 16C550 and its block diagram
Table 7
40H UART BUFFER/UART DIVISOR LSB
41H UART DIVISOR MSB
42H UART FIFO CONTROL REGISTER
43H UART LCR CONTROL REGISTER
44H MCR MODEM CONTROL
45H UART LINE STATUS
46H MSR MODEM STATUS
47H UART SCR
The 16550 is the most common UART. The 16650 contains two 16 byte FIFO's and
on board support for software flow control.
UART 16550 Registers
Eight I/O bytes are used for each UART to access its registers. The following table
shows, where each register can be found. The base address used in the table is the
lowest I/O port number assigned. The switch bit DLAB can be found in the line

EKT222 Microprocessor System
UniMAP 11
control register LCR as bit 7 at I/O address base + 3. This training kit board has base
address of 40H.
Table 8: UART register to port conversion table
DLAB = 0 DLAB = 1
I/O
port Read Write Read Write
base
RBR
receiver
buffer
THR
transmitter
holding
DLL divisor latch LSB
base +
1
IER
interrupt
enable
IER
interrupt
enable
DLM divisor latch MSB
base +
2
IIR
interrupt
identification
FCR
FIFO
control
IIR
interrupt
identification
FCR
FIFO
control
base +
3 LCR line control
base +
4 MCR modem control
base +
5
LSR
line
status
–
factory
test
LSR
line
status
–
factory
test
base +
6
MSR
modem
status
–
not
used
MSR
modem
status
–
not
used
base +
7 SCR scratch
LCR : Line control register (R/W)
The LCR, line control register is used at initialization to set the communication
parameters. Parity and number of data bits can be changed for example. The register
also controls the accessibility of the DLL and DLM registers. These registers are
mapped to the same I/O port as the RBR, THR and IER registers. Because they are
only accessed at initialization when no communication occurs this register swapping
has no influence on performance.

EKT222 Microprocessor System
UniMAP 12
Table 9: LCR : line control register
Bit Value Description
0,1
Bit 1 Bit 0 Data word length
0 0 5 bits
0 1 6 bits
1 0 7 bits
1 1 8 bits
2
0 1 stop bit
1
1.5 stop bits (5 bits word)
2 stop bits (6, 7 or 8 bits word)
3,4,5
Bit 5 Bit 4 Bit 3
x x 0 No parity
0 0 1 Odd parity
0 1 1 Even parity
1 0 1 High parity (stick)
1 1 1 Low parity (stick)
6 0 Break signal disabled
1 Break signal enabled
7 0 DLAB : RBR, THR and IER accessible
1 DLAB : DLL and DLM accessible
Example:
To configure serial port as 8 bit, 1 stop bit ,no parity, break disable and SET DLAB:
to access DLL&DLM
1000 0011 B = 83H
To configure serial port as 8 bit 1 stop bit no parity break disable and clear DLB:
RBR,THR&IER are accessible.
0000 0011 B = 03H

EKT222 Microprocessor System
UniMAP 13
FCR : FIFO control register (WO)
The FCR, FIFO control register is present starting with the 16550 series. This register
controls the behaviour of the FIFO's in the UART. If a logical value 1 is written to
bits 1 or 2, the function attached is triggered. The other bits are used to select a
specific FIFO mode.
Table 10: FCR: FIFO Control register
Bit Value Description
0 0 Disable FIFO's
1 Enable FIFO's
1 0 –
1 Clear receive FIFO
2 0 –
1 Clear transmit FIFO
3 0 Select DMA mode 0
1 Select DMA mode 1
4 0 Reserved
5 0 Reserved (8250, 16450, 16550)
1 Enable 64 byte FIFO (16750)
6,7
Bit 7 Bit 6 Receive FIFO interrupt trigger level
0 0 1 byte
0 1 4 bytes
1 0 8 bytes
1 1 14 bytes
Example:
To enable FIFO, clear receive FIFO and clear transmit FIFO
0000 0111 B = 07 H
DLL and DLM : Divisor latch registers (R/W)
For generating its timing information, each UART uses an oscillator generating a
frequency of about 2 MHz. This frequency is divided by 16 bit number to generate
the time base for communucation. Because of this division, the maximum allowed
communication speed is 115200 bps. Modern UARTS like the 16550 are capable of
handling higher input frequencies up to 24 MHz which makes it possible to
communicate with a maximum speed of 1.5 Mbps. On PC's higher frequencies than

EKT222 Microprocessor System
UniMAP 14
the 2 MHz are rarely seen because this would be software incompatible with the
original XT configuration.
This 115200 bps communication speed is not suitable for all applications. To change
the communication speed, the frequency can be further decreased by dividing it by a
programmable value. For very slow communications, this value can go beyond 255.
Therefore, the divisor is stored in two seperate bytes, the divisor latch registers DLL
and DLM which contain the least, and most significant byte.
For error free communication, it is necessary that both the transmitting and receiving
UART use the same time base. Default values have been defined which are commonly
used. The following table is used to initialize 16C550 UART to 9600 baudrate with
2MHz clock rate microprocessor system as this training kit system.
i.e 2MHz/13 = 153846Hz
Table 11: Baudrate setting
Speed (bps) Divisor DLL DLM
9600 13 0x13 0x00
The following code is an example of initializing UART 16550 using a microprocessor
system with 2Mhz clock rate.
;---------- 16C550 COMPATIBLE UART I/O ADDRESS --------------------
; E.G., UM8250B, 16C450, 16C550
UART_BUFFER: EQU 40H
UART_LINE_STATUS: EQU 45H
UART_FIFO: EQU 42H
UART_LCR: EQU 43H
UART_DIVISOR_LSB: EQU 40H
UART_DIVISOR_MSB: EQU 41H
UART_SCR: EQU 47H
; INITIALIZE 16C550 UART TO 9600 8N1 WITH 2MHZ CLOCK
; 2MHZ/13 = 153846HZ
INIT_UART:
MVI A,83H
OUT UART_LCR ; SET DLAB BIT TO ACCESS DIVIDER
MVI A,13
OUT UART_DIVISOR_LSB
MVI A,0
OUT UART_DIVISOR_MSB
; 2MHZ/13 = 153846 HZ
; 153846HZ/16 = 9615HZ
MVI A,7
OUT UART_FIFO ;INIT FIFO AND CLEAR ALL ;
;BUFFERS
MVI A,03H
OUT UART_LCR ; CLAR DLAB

EKT222 Microprocessor System
UniMAP 15
; CHECK UART LINE STATUS, IF THE
BYTE IS FF
;THEN NO UART
XRA A
OUT UART_SCR ; CHECK IF THERE IS UART
IN UART_SCR
CPI 0
JZ FOUND
XRA A
STA UART_FOUND
RET
FOUND: MVI A,1
STA UART_FOUND
RET
UART_FOUND:
DFS 1 ; 0 = NO UART, 1 UART FOUND
Example code for sending data through the serial port. Data to send is available in
register A.
;SENDING DATA THROUGH SERIAL PORT
COUT:
MOV B,A ; SAVE A
COUT1:
IN UART_LINE_STATUS
ANI 20H ; TRANSMITTER READY?
JZ COUT1
MOV A,B ; RESTORE A
OUT UART_BUFFER
RET
Example code for reading data from the serial port. Data received is available in
register A.
:READING DATA FROM SERIAL PORT
CIN:
IN UART_LINE_STATUS
ANI 1 ; DATA AVAILABLE?
JZ CIN
IN UART_BUFFER
RET
e. Keypad and Seven Segment Display Interface- these I/O devices are controlled by
system through system PPI at the address of 10H-13H. The port used are as shown in
Table 12.

EKT222 Microprocessor System
UniMAP 16
Table 12: Seven Segment Display control.
Digit 6 Digit 5 Digit 4 Digit 3 Digit 2 Digit 1
Anode PB0-PB7 PB0-PB7 PB0-PB7 PB0-PB7 PB0-PB7 PB0-PB7
Cathode
(PC0-PC4)
controls
74LS145-4
to 10
multiplexer
outputs.
Out 0 Out1 Out2 Out3 Out4 Out5
Table 13: Keypad Row Control
Row 1 2 3 4 5 6 7 8
IO
Port PA0 PA1 PA2 PA3 PA4 PA5 PA6 PA7
Table 14: Keypad Column Control
Column 1 2 3 4 5 6
Column
(PC0-PC4)
controls
74LS145-
4 to 10
multiplexer
outputs
Out 0 Out1 Out2 Out3 Out4 Out5
f. Interrupts Test Button
The interrupt test button provides a single positive pulse that tied to CPU hardware
interrupt pins, RST5.5, RST6.5 and INTR. User can select the pulse to be triggered
for each pin by dip switch SW1 at a time. The onboard LED, D4 indicates the pulse
is activated when press Test button.
3. COMMUNICATION BETWEEN 8085 TRAINING KIT AND HOST COMPUTER
(TERMINAL)
The ROM monitor contains powerful commands when using UART to connect a terminal. The

EKT222 Microprocessor System
UniMAP 17
UART drivers and serial commands are automatically configured when UART chip was
inserted.
Communication format is based on 9600 bit/sec, 8 data bit, no parity and one stop bit. We can
use PC running terminal emulation as VT100. When we type keyboard, the ASCII code will
send to the MTK-85 board. And the response from the board will send back to display on PC
screen.
Figure 6: Using PC as the terminal
Using PC as the terminal, we can run the assembler software that helps translating the assembly
program into machine code easily. The machine code is formed in the ASCII text file using the Intel
HEX file format. The monitor program has command that accepts HEX file downloading from the
PC to the board. This helps for long program and high level programming.
Figure 7: Using Assembler for source program translation.
Terminal Emulation Software
Any terminal emulation software can be used, however we can try the free software, Tera Term Pro
version 2.3, developed by T. Teranishi. You may download it from this URL.

EKT222 Microprocessor System
UniMAP 18
We can use the RS232C cable with both ends are DB9 female type. The cable is straight
through signal, not the cross signal cable.
Figure 8: Wiring between both ends DB9 connector.
When open the Tera Term program, we can select mode of connection using serial interface

EKT222 Microprocessor System
UniMAP 19
and select the COM port that you are connecting.
Figure 9: Select serial connection using COM1 until COM4 follow your USB com port
setting.
Press RESET at MTK-85 for linking MTK-85 to Tera Term Software.
Figure 10: RESET preview at TERA TERM.
RESET

EKT222 Microprocessor System
UniMAP 20
Press command ? for help the help menu will display.
Figure 11: Enter command ‘?’ for help menu display. There is no need to switch between standalone mode and terminal mode. The monitor program
for both modes is working concurrently. When press RESET at MTK-85 the prompt appears on screen.
MTK-85 8085 MICROPROCESSOR TRAINING KIT (? HELP) 8100>
Command ‘?’ for help menu listing.
MTK-85 8085 MICROPROCESSOR TRAINING KIT (? HELP)
A - ASCII code
C - clear watch variables
D - disassemble
E - edit memory
F - fill constant
H - hex dump

EKT222 Microprocessor System
UniMAP 21
I - i/o address map
J - jump to user program
K - display user STACK
L - load Intel hex file
M - monitor call number
N - new location pointer
Q - quick home location
R - user register display
S - set value to user register
W - watch variables
SPACE BAR - single step
? - help menu
8100>
Command ‘A’ prints the hexadecimal code for printable ASCII characters.
8100>print ASCII code
=20 !=21 "=22 #=23 $=24 %=25 &=26 '=27 (=28 )=29 *=2A +=2B ,=2C -=2D .=2E /=2F
0=30 1=31 2=32 3=33 4=34 5=35 6=36 7=37 8=38 9=39 :=3A ;=3B <=3C ==3D >=3E ?=3F
@=40 A=41 B=42 C=43 D=44 E=45 F=46 G=47 H=48 I=49 J=4A K=4B L=4C M=4D N=4E O=4F
P=50 Q=51 R=52 S=53 T=54 U=55 V=56 W=57 X=58 Y=59 Z=5A [=5B \=5C ]=5D ^=5E _=5F
`=60 a=61 b=62 c=63 d=64 e=65 f=66 g=67 h=68 i=69 j=6A k=6B l=6C m=6D n=6E o=6F
p=70 q=71 r=72 s=73 t=74 u=75 v=76 w=77 x=78 y=79 z=7A {=7B |=7C }=7D ~=7E =7F
8100>
Command ‘C’ clears the 16-byte watch variables. The monitor provides quick access to a16-byte
RAM for program testing. The watch variables use RAM space from F000-F00F.
8100> F000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 8100>
Command ‘D’ disassembles the machine code into 8085 instructions.
8100>disassemble...
8100 0A LDAX B
8101 22C480 SHLD 80C4
8104 D8 RC
8105 54 MOV D, H
8106 3B DCX SP
8107 F65E ORI 5E
8109 47 MOV B, A
810A 08 DFB

EKT222 Microprocessor System
UniMAP 22
810B 98 SBB B
810C 28 DFB
810D 41 MOV B, C
810E 09 DAD B
810F D2DEC7 JNC C7DE
8112 83 ADD E
8113 4E MOV C, M
8114 60 MOV H, B
8115>
Command ‘E’ examines and modify the data in memory. We can use this command to enter
machine code. To view the content, uses Space key and to enter a byte, press two HEX digits. To
quit just press ENTER.
8115>edit memory location = 8100
Enter to quit, SPACE key to view content
ADDR DATA
8100 [0A]
8101 [22]
8102 [C4]
8103 [80] 11
8104 [D8] 0a
8105 [54] 81
8106 [3B] 34
8107 [F6]
8107>
Command ‘F’ fills 8-bit constant to memory. The example shows fill constant FF to memory
from 9000 to 9100. We can use Command ‘N’ for setting new location and Command ‘H’ for
display the memory contents.
8107>Begin address = 9000 End address = 9100 Data = ff
8107>new location = 9000
9000>
9000 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9010 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9020 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9030 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9040 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9050 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9060 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9070 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF ................
9080>
Command ‘H’ dumps memory. The content of memory from current pointer 9010 to 908F will
display in hexadecimal. The ASCII code for each byte will be displayed also. The dot will be
displayed for nonprintable ASCII code.

EKT222 Microprocessor System
UniMAP 23
8115>
8115 C8 76 3E 29 03 92 04 82 00 20 68 26 D8 98 80 65 .v>)..... h&...e
8125 8A C9 DD CB 43 A8 70 00 90 98 4C 80 86 70 A6 54 ....C.p...L..p.T
8135 CE BC 48 43 45 47 10 02 86 A6 43 88 60 5A FA E3 ..HCEG....C.`Z..
8145 B2 40 0C 63 C1 09 C2 61 BC E0 5A 64 32 68 26 49 [email protected]&I
8155 21 54 16 E6 55 04 05 51 6C 49 4B C2 46 C0 48 2C !T..U..QlIK.F.H,
8165 44 8D C4 C5 A7 8C D5 91 C5 93 7A 3A 5A 45 42 8B D.........z:ZEB.
8175 90 AE 85 25 EC 33 71 1A 41 C0 89 34 2C C4 87 11 ...%.3q.A..4,...
8185 F7 A1 1C 05 19 77 40 8B 23 87 0B 01 06 CD A6 58 .....w@.#......X
8195>
Command ‘I’ displays onboard I/O address.
8195>
00H-0FH onboard 4-bit GPIO, D0-D3=output port
D4-D7=input port
10H-13H 8255 system PPI, 10H=PORTA, 11H=PORTB, 12H=PORTC, 13H=CONTROL
20H-23H 8254 programmable counter, 20H=counter0, 21H= counter1
22H=counter2, 23H control register
30H-33H 8255 user PPI, 30H=PORTA, 31H=PORTB, 32H=PORTC, 33H=CONTROL
40H-47H C16550 UART registers
8195>
Command ‘J’ jumps from monitor program to user program. The example shows jump to
address 8100. The user register displays results after running the code. The RST 7 returns control
back to monitor program.
Suppose our program is adding two BCD numbers in register A and register B.
8100 3E19 MVI A, 19
8102 0602 MVI B, 02
8104 80 ADD B
8105 27 DAA
8106 FF RST 7
8117>jump to address [8107] = 8100
AF=2114 BC=02A5 DE=2DF3 HL=7E2E SP=F098 PC=8107 S=0 Z=0 AC=1 P=1 CY=0
8117>
We can see the result of addition in register A is 21 (19+02=21). The user registers are displayed
in 16-bit, e.g. AF=2114 (A=21, F=14).

EKT222 Microprocessor System
UniMAP 24
Command ‘K’ displays user STACK memory. The example below shows running instruction
PUSH H. This instruction will put the content of HL register to STACK memory. We may enter
E5 to address 8100 with Command ‘E’.
We first check the user register with Command ‘r’. We see that TOP of STACK is F098. After
pressing SPACE BAR for single step, the SP is now F096. We can see the content of STACK
memory with Command k. The content of HL was saved in STACK, the content of H=91 will
be saved at F097 and L=1B at F096. TOP of STACK is now F096.
F=2114 BC=02A5 DE=2DF3 HL=7E2E SP=F098 PC=8107 S=0 Z=0 AC=1 P=1 CY=0
8117> enter command space
8107 F61E ORI 1E
AF=3F04 BC=02A5 DE=2DF3 HL=7E2E SP=F098 PC=8109 S=0 Z=0 AC=0 P=1 CY=0
8117> enter command ‘k’
ADDR DATA
F098 [62]
Command ‘L’ loads Intel Hex file to memory. The Assembler and C compiler for 8085 CPU
can produce standard Intel Hex file. The hex file contains machine code represented by ASCII
letters. Press command ‘l’ makes the board ready to read HEX file through serial port. We go to
FILE menu and select Send File.
Note: you may press ESC to escape the command before sending the file.
MTK-85 8085 MICROPROCESSOR TRAINING KIT (? HELP)
8100>load Intel hex file...
Choose the program form the HEX program to download sample program

EKT222 Microprocessor System
UniMAP 25
‘Example1HexFile.Hex’
The onboard dot LED will run to indicate downloading is ongoing.

EKT222 Microprocessor System
UniMAP 26
When completed, the report will show a number of byte received and print checksum error. If no
error it will show 0 errors.
MTK-85 8085 MICROPROCESSOR TRAINING KIT (? HELP)
8100>load Intel hex file...000515 bytes loaded 0 errors
8100>
8100>
To run the program, press RESET key at MTK-85.
To get back to MONITOR PROGRAM or STOP the running program, TURN OFF the the
‘POWER SWITCH’ and disconnect the software program connection.
RESET

EKT222 Microprocessor System
UniMAP 27
or
To get back to MONITOR PROGRAM or STOP the running program press RESET (2 second)
the press USER1 together, then release RESET, then release USER1one by one. Until 7-segment
(ADDRESS and DATA) will show address 8100.
Press 2 Second , Then Press together, Release
RESET then release USER1
The first program will write the 8-bit data to the onboard output port at the I/O address 0.
/*
Test GPIO LED with Micro-C
*/
#include c:\mc85\8085io.h
#define gpio 0 // GPIO I/O address
delay(int j)
{
int n;
RESET
USER1

EKT222 Microprocessor System
UniMAP 28
for(n=0; n<j; n++)
continue;
}
main()
{
int i;
i=0;
while(1) // repeat below block forever
{
out(gpio,i++); // write to 4-bit output port
delay(200); // delay
}
}
Command ‘M’ shows monitor call number. Some of common subroutines can be called through
RST 1 with function number preloaded in register E.
8100>
see input parameters in user manual
1Enn MVI E,function_number
CF RST 1
00 - demo
01 - delay
02 - cold_boot
03 - scan
04 - cin
05 - cout
06 - put_str
07 - init_lcd
08 - lcd_ready
09 - clear_lcd
0A - goto_xy
0B - put_str_lcd
0C - put_ch_lcd
0D - demo2
8100>
Command ‘N’ sets new location pointer at prompt. The example sets new pointer to E000 and
press ‘d’ to disassemble.
8100>new location = e000
E000>disassemble...

EKT222 Microprocessor System
UniMAP 29
E000 BA CMP D
E001 3E9F MVI A,9F
E003 6F MOV L,A
E004 DF RST 3
E005 6C MOV L,H
E006 97 SUB A
E007 ED DFB
E008 14 INR D
E009 C7 RST 0
E00A A6 ANA M
E00B D9 DFB
E00C C0 RNZ
E00D 33 INX SP
E00E DC945A CC 5A94
E011 60 MOV H,B
E012 BA CMP D
E013>
Command ‘Q’ sets location pointer at prompt to 8100 and sets user PC to 8100.
E013> press ‘q’
8100> press ‘r’
AF=3F21 BC=83A5 DE=29F3 HL=7E2E SP=F098 PC=8100 S=0 Z=0 AC=0 P=0 CY=1
8100>
Command ‘R’ displays user registers content.
8100>
AF=3F21 BC=83A5 DE=29F3 HL=7E2E SP=F098 PC=8100 S=0 Z=0 AC=0 P=0 CY=1
8100>
Command ‘S’ sets value to user registers. Enter Command ‘A’ then Command ‘R’
8100>set value to user register (enter A for AF) ? press ‘a’
AF=3F21 0000
8100> press ‘r’
AF=0000 BC=83A5 DE=29F3 HL=7E2E SP=F098 PC=8100 S=0 Z=0 AC=0 P=0 CY=0
8100>
Command ‘W’ prints watch variables. These 16 bytes memory in RAM are reserved for quick
examining when test the program that used RAM.
8100>
F000 60 0D 5B FB D9 7E 43 BE F7 E6 B7 DD 57 4F 11 8B

EKT222 Microprocessor System
UniMAP 30
8100>
For example, we want to store content of register A to RAM at location F000. We can enter
small code at 8100.
Key in the data to MTK-85
8100 3E1D MVI A, 1D ; load accumulator with 1D
8102 3200F0 STA F000 ; store A to RAM at F000
Press Command ‘C’ and Command ‘SPACE BAR’.
8100> enter ‘c’
F000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
8100> enter space
8100 3E1D MVI A,1D
AF=1D00 BC=83A5 DE=29F3 HL=7E2E SP=F098 PC=8102 S=0 Z=0 AC=0 P=0 CY=0
8100> enter space
8102 3200F0 STA F000
AF=1DB4 BC=82A5 DE=29F3 HL=7E2E SP=F098 PC=8105 S=1 Z=0 AC=1 P=1 CY=0
8100> enter ‘w’
F000 1D 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
8100>
We see that we can display such memory space with single key to see the result of instruction
that stores one byte to this memory.
Command ‘SPACEBAR’ executes the instruction at address in user PC. The instruction will
show on screen with user registers result after execution.
Suppose we write a program shown below.
org 8100h
xra a
loop: out 0
mov h, a
inr h
push h
pop d
mov a, d
jmp loop
end

EKT222 Microprocessor System
UniMAP 31
Then translate it to machine code file using the Assembler program. Download hex file.
MTK-85 8085 MICROPROCESSOR TRAINING KIT (? HELP)
8100>load Intel hex file...000011 bytes loaded 0 errors
8100>disassemble... press Command D
8100 AF XRA A
8101 D300 OUT 00
8103 67 MOV H, A
8104 24 INR H
8105 E5 PUSH H
8106 D1 POP D
8107 7A MOV A, D
8108 C30181 JMP 8101
810B 00 NOP
810C 00 NOP
810D 00 NOP
810E 00 NOP
810F 00 NOP
8110 00 NOP
8111 00 NOP
8112 00 NOP
8113> print user register with ‘Command r’ AF=1DB4 BC=82A5 DE=29F3 HL=7E2E SP=F098 PC=8100 S=1 Z=0 AC=1 P=1 CY=0
8113> press ‘SPACE’ key to execute instruction at 8100, we see A=00
8100 AF XRA A
AF=0044 BC=82A5 DE=29F3 HL=7E2E SP=F098 PC=8101 S=0 Z=1 AC=0 P=1 CY=0
8113> press SPACE key, the content of A will send to GPIO
8101 D300 OUT 00
AF=0044 BC=82A5 DE=29F3 HL=7E2E SP=F098 PC=8103 S=0 Z=1 AC=0 P=1 CY=0
8113> press SPACE key, the content of A will copy to H
8103 67 MOV H,A
AF=0044 BC=82A5 DE=29F3 HL=002E SP=F098 PC=8104 S=0 Z=1 AC=0 P=1 CY=0
8113> press SPACE key, the content of H will increment by 1
8104 24 INR H
AF=0000 BC=82A5 DE=29F3 HL=012E SP=F098 PC=8105 S=0 Z=0 AC=0 P=0 CY=0
8113> press SPACE key, the content SP will decrement by 2
8105 E5 PUSH H
AF=0000 BC=82A5 DE=29F3 HL=012E SP=F096 PC=8106 S=0 Z=0 AC=0 P=0 CY=0
8113> press K, to see the content of STACK memory
ADDR DATA

EKT222 Microprocessor System
UniMAP 32
F096 [2E]
F097 [01]
F098 [62]
8113> press SPACE key, DE will be loaded with top of STACK
8106 D1 POP D
AF=0000 BC=82A5 DE=012E HL=012E SP=F098 PC=8107 S=0 Z=0 AC=0 P=0 CY=0
8113> press SPACE key, the content of D will copy to A
8107 7A MOV A,D
AF=0100 BC=82A5 DE=012E HL=012E SP=F098 PC=8108 S=0 Z=0 AC=0 P=0 CY=0
8113> press SPACE key, PC will be loaded with 9001
8108 C30181 JMP 8101
AF=0100 BC=82A5 DE=012E HL=012E SP=F098 PC=8101 S=0 Z=0 AC=0 P=0 CY=0
8113> press SPACE key, the content of A will send to GPIO, see LED!
8101 D300 OUT 00
AF=0100 BC=82A5 DE=012E HL=012E SP=F098 PC=8103 S=0 Z=0 AC=0 P=0 CY=0
8113>
At MTK-85 press HOME and then RUN key for run the program.
Result: The 4 LED GPIO is all light
HOME
RUN

EKT222 Microprocessor System
UniMAP 33
Appendix 1
Schematic of circuit connection.

EKT222 Microprocessor System
UniMAP 34

EKT222 Microprocessor System
UniMAP 35

EKT222 Microprocessor System
UniMAP 36

EKT222 Microprocessor System
UniMAP 37