Embed Size (px)
Citation preview
3196
www.ijifr.com Copyright © IJIFR 2015
Reviewed Paper
International Journal of Informative & Futuristic Research ISSN (Online): 2347-1697
Volume 2 Issue 9 May 2015
Abstract
The aim of this paper is to detect abnormal events in video streams, a challenging but important subject in video surveillance. A novel algorithm is proposed to address this problem. The algorithm is based on an image descriptor and a nonlinear classification method. The images are subjected to Otsu’s method for global thresholding. A histogram of optical flow orientation as a descriptor encoding the moving information of each video frame is used here. The k-nearest neighbor (kNN) classification algorithm, following a learning period characterizing the normal behavior of training frames, detects abnormal events in the current frame. Further, a fast version of the detection algorithm is designed by fusing the optical flow computation with a background subtraction step. Finally a method to detect abnormal events on several benchmark data set is applied.
Detection Of Abnormal Visual Events
Using HOFO And KNN Paper ID IJIFR/ V2/ E9/ 045 Page No. 3196-3210 Subject Area
Computer Science
Engineering
Key Words Abnormal Visual Events, Otsu’s Method, Optical Flow, HOFO, kNN
Aswathy Unnikrishnan 1
M.Tech Scholar Department of Computer Science & Engineering Musaliar College of Engineering and Technology Pathanamthitta-Kerala
Ajesh F 2
Assistant Professor Department of Computer Science & Engineering Musaliar College of Engineering and Technology Pathanamthitta-Kerala
Reshma S. Nair 3
M.Tech Scholar Department of Computer Science & Engineering Musaliar College of Engineering and Technology Pathanamthitta-Kerala

3197
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
1. Introduction
1.1Abnormal Visual Event
One of the significant examination zones in PC vision is visual reconnaissance. The exploratory test
here incorporates the usage of programmed frameworks for acquiring point by point data about the
conduct of people and gatherings. Abnormal visual occasion discovery in swarmed scenes is one of
the key and testing advances openly wellbeing. Crowd scenes transitioning from normal to abnormal
behaviors such as ―rush‖, ―scatter‖ and ―herding‖ were detected. The anomalous recognition issues
have different names in the writing, for example, the suspicious occasion, unpredictable conduct,
phenomenal conduct, unordinary activity/event/behavior, strange conduct, abnormality, and so forth
. The examination concentrates on the conference video; unmanned aerial vehicle (UAV) motion
imagery and ground reconnaissance video; news broadcast video; surveillance video of the areas
including market, museum, warehouse, aerial surveillance, room of old people, plaza, airport
terminal, parking lot, traffic, subway stations and sign language data. Defense advanced research
projection agency (DARPA) has upheld a few exploration ventures, which incorporate visual
surveillance and monitoring (VSAM,1997) ,human identification at a distance (HID, 2000), feature
and picture recovery investigation apparatus (VIRAT, 2008) . The public transportation system is
additionally an area identifying with anomalous identification issues. The challenge for real-time
event detection solutions (CREDS) characterized by the needs of Paris public transportation network
(RATP) concentrated on nearness cautioning dropping objects on tracks; launching objects across
platforms; persons caught by the door of a moving train, strolling on rails, falling on the track and
crossing the rails.
Abstraction and event modeling are the two important components of anomaly detection.
Abstraction is the organization of low-level inputs into various constructs (or ―primitives‖)
representing the abstract properties of the video data. There are three main categories of abstraction
approaches: pixel-based, object-based and logic-based abstraction. Pixel-based abstraction describes
the properties of pixel features in the low-level input Object-based abstraction describes the input in
terms of semantic objects. Logic-based abstraction organized the input into statement of semantic
knowledge. Event modeling is the subsequent problem to abstraction.. Given the choice of an
abstraction scheme, event modeling seeks formal ways to describe and recognize events in a
particular domain. There are generally three categories, pattern-recognition methods, state event
models and semantic event models. A pixel-based abstraction combined with pattern-recognition
abnormal detection method is proposed here.
For abnormal event detection tasks in video, here a descriptor encoding the movement information
of the global frame is proposed. Moreover, k nearest neighbor classifier is proposed, to distinguish
the abnormal event from the reference model.
1.2 Overview
The rest of the paper is organized as follows. In Section 2, the existing system based on HOFO and
SVM is described. In Section 3, the proposed descriptor, histogram of optical flow orientation
(HOFO), is described to provide feature vectors for classification algorithm. In the same section, the
KNN classifier is also introduced. Section 4 portrays the results obtained. Finally, Section 5
concludes the paper.
3198
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
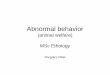
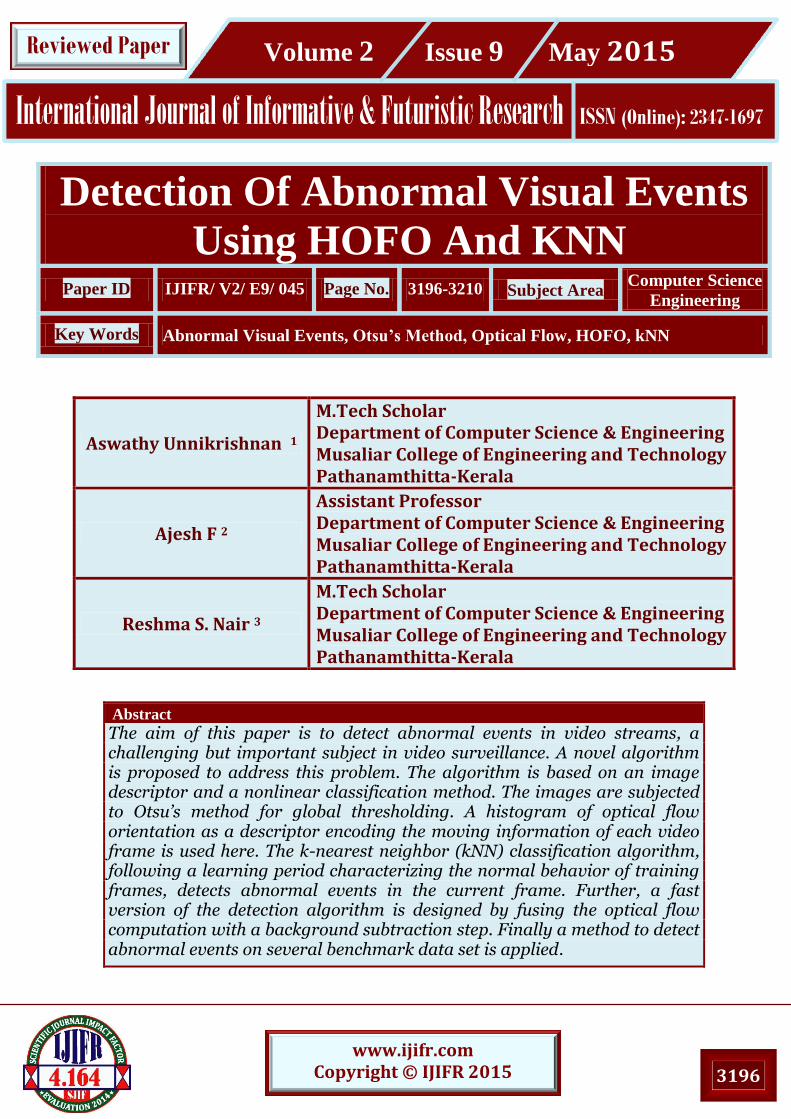
Figure 1.1.Normal and abnormal scenes. (a) A normal frame in UMN dataset lawn scene; the
individuals are walking in different directions. (b) A normal frame in PETS2009 dataset ; the
individuals are walking in different directions. (c) An abnormal frame in lawn scene; the individuals are
running in different directions. (d) An abnormal frame in PETS2009 dataset; all the individuals are
walking in the same direction.
2. Existing System
2.1 Abnormal event Detection using SVM
In the work done in [1], a novel algorithm was proposed based on an image descriptor and a
nonlinear classification method. A histogram of optical flow orientation as a descriptor encoding the
moving information of each video frame was introduced. The nonlinear one-class support vector
machine classification algorithm, following a learning period characterizing the normal behavior of
training frames, detects abnormal events in the current frame. Further, a fast version of the detection
algorithm was designed by fusing the optical flow computation with a background subtraction step.
Finally a method to detect abnormal events on several benchmark data set was applied.
2.2 Classifier
Support Vector Machine (SVM) is a method based on statistical learning theory and risk
minimization for classification and regression. SVM is initially proposed by Vapnik and Lerner [14].
Later, SVM has been extended to nonlinear framework with the introduction of kernel methods. By
adopting a kernel trick, which implicitly maps inputs into high-dimensional feature space, SVM can
effectively perform non-linear classification problems. The objective of non-linear one-class SVM is
to determine a suitable region in the input data space .This data space includes most of the
samples drawn from an unknown probability distribution P. This objective can be achieved by
searching for a decision hyperplane in the feature space, H, which maximizes its distance from the
3199
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
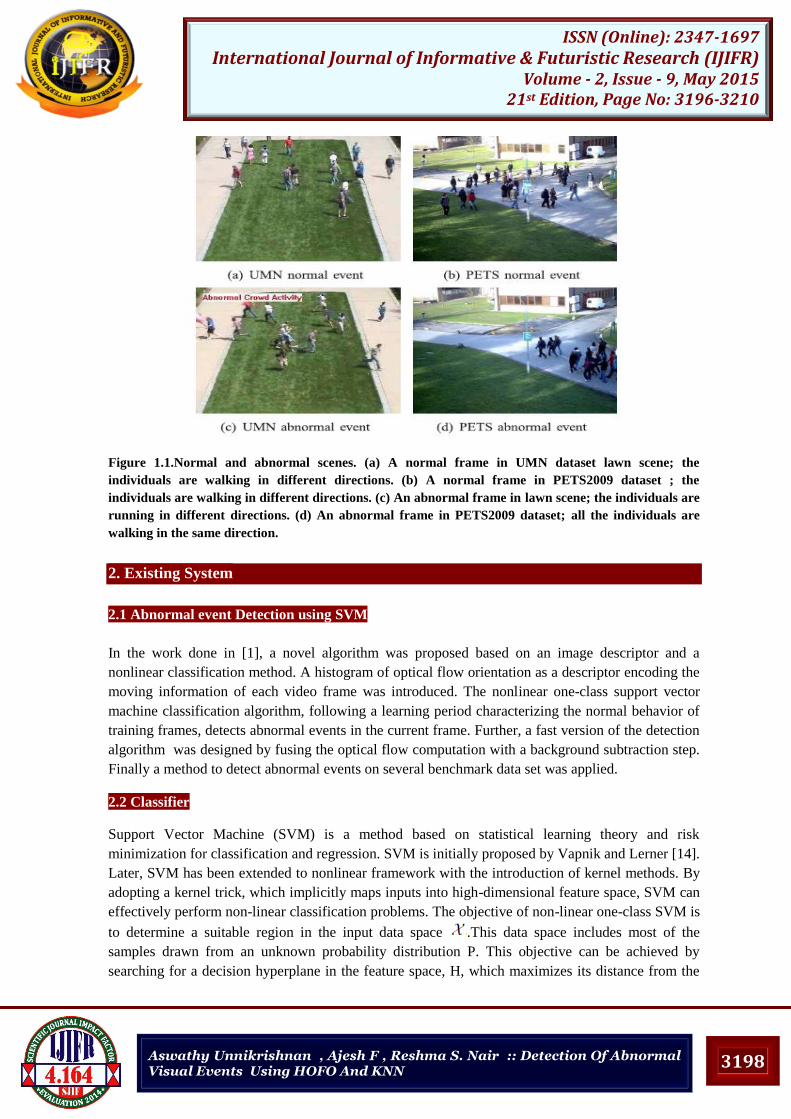
origin, while only a small fraction of data falls between the hyperplane and the origin . Fig. 2.1
illustrates the hyperplane.
Figure 2.1: Division of data in the feature space of the one-class SVM.
The hyperplane one-class SVM is formulated as a constrained minimization problem:
(1)
where are n training samples in the original data space
maps datum xi into the feature space is the
maximum margin decision hyperplane, ξi is the slack variable for penalizing the outliers. The
hyperparameter ν ∈ (0, 1] is the weight for restraining slack variable, it tunes the number of
acceptable outliers. The mapping Φ allows us to solve a non-linear classification problem by
designing a linear classifier in the feature space . Kernel function is defined as
to compute dot product in . The decision function, applying
Lagrangian multipliers αi in the original data space , is defined as:
If proper parameters are given, classical kernels, such as Gaussian, polynomial, and sigmoidal
kernel, have similar performances . The Gaussian kernel is chosen to handle spatial features in our
work. It is a semi-positive definite kernel that satisfies the Mercer condition . The Gaussian kernel is
defined as the following expression:
where xi , x j are the data in the original data space X, the variance σ indicates the scale factor at
which the data should be clustered.
3200
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
3. Proposed System
In the proposed framework, a novel calculation is proposed to address the issue of strange occasion
discovery. The calculation is in view of a picture descriptor and a nonlinear characterization system.
Here as well, a histogram of optical flow introduction as a descriptor encoding the moving data of
every feature frame is utilized. For grouping of anomalous frames k closest neigbhbor classifier
(kNN) is utilized.
3.1 Histogram Of Optical Flow Orientation
Since actions can be characterized by both direction and amplitude of object movement on the scene,
to extract low-level features we use optical flow. It can give important information about the spatial
arrangement of the objects and the change rate of this arrangement. Optical flow is the distribution
of apparent velocities of movement of brightness patterns in an image. B.Horn and B. Schunck
proposed the algorithm introducing a global constraint of smoothness to computer optical flow.It
combines a data term and a spatial term. The data term assumes constancy of the same image
property, and the spatial term models the expected flow variation. For two-dimensional image
sequences, the optical flow is formulated as a global energy functional:
E =∫∫ [(Ixu+Iyv+It )²+α2(||∇u||²+||∇v||²)]dxdy, (2)
where Ix , Iy and It are the derivatives of the picture intensity along the x, y and time t measurement,
u and v are the horizontal and vertical segments of the optical flow, α is the parameter speaking to
the weight of the regularization term. Lagrange equations are used to minimize the functional E,
yielding:
(3)
where u and v are weighted average of u and v calculated in a neighborhood around the pixel
location. An iterative scheme is adopted to compute optical flow as follows:
(4)
where k signifies the algorithm iteration. In this work, a novel scene descriptor registering the
histogram of optical flow introduction (HOFO) of the original picture, or the foreground picture
acquired in the wake of applying background subtraction is proposed.
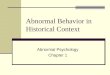
In Histogram of Optical Flow Orientation(HOFO) , video frames are divided into local
nodes(local regions).Each region is again divided into sub-regions and optical flows are computed in
each sub-region. Then these flow histograms of sub-regions are concatenated to form a HOFO of the
local region. Fig. 3.1 shows the HOFO feature descriptor of the original and foreground pictures.
3201
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
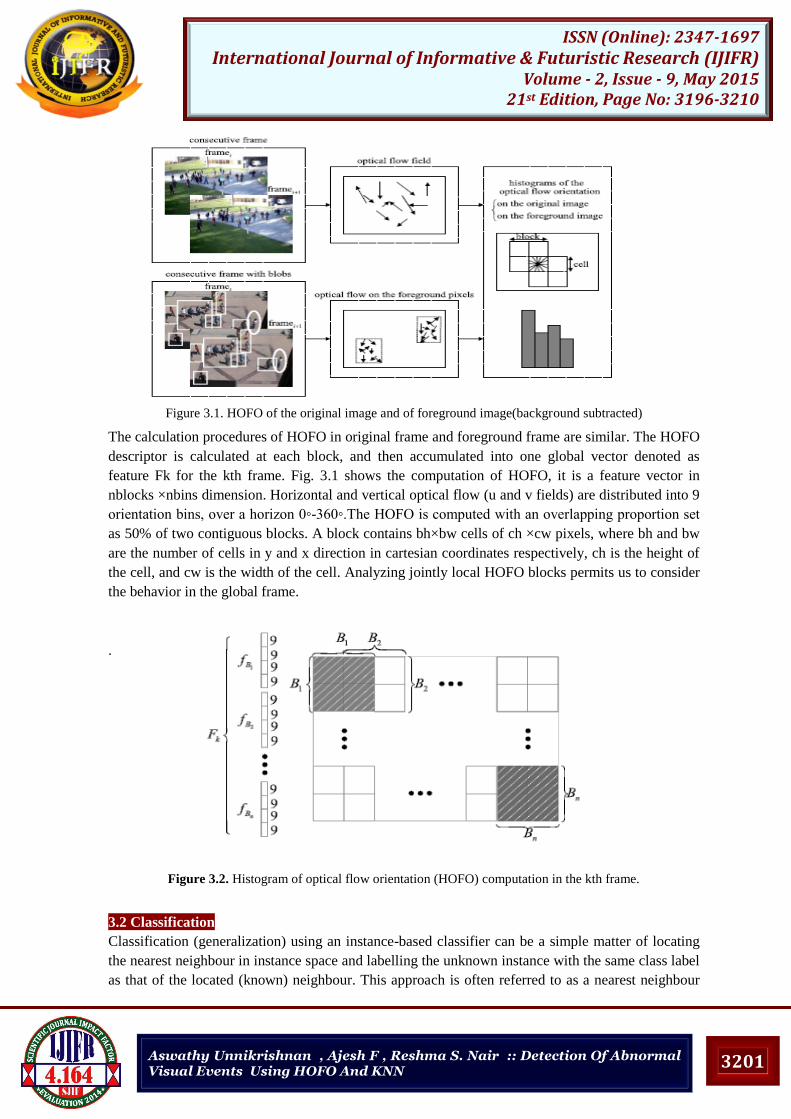
Figure 3.1. HOFO of the original image and of foreground image(background subtracted)
The calculation procedures of HOFO in original frame and foreground frame are similar. The HOFO
descriptor is calculated at each block, and then accumulated into one global vector denoted as
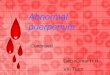
feature Fk for the kth frame. Fig. 3.1 shows the computation of HOFO, it is a feature vector in
nblocks ×nbins dimension. Horizontal and vertical optical flow (u and v fields) are distributed into 9
orientation bins, over a horizon 0◦-360◦.The HOFO is computed with an overlapping proportion set
as 50% of two contiguous blocks. A block contains bh×bw cells of ch ×cw pixels, where bh and bw
are the number of cells in y and x direction in cartesian coordinates respectively, ch is the height of
the cell, and cw is the width of the cell. Analyzing jointly local HOFO blocks permits us to consider
the behavior in the global frame.
.
Figure 3.2. Histogram of optical flow orientation (HOFO) computation in the kth frame.
3.2 Classification
Classification (generalization) using an instance-based classifier can be a simple matter of locating
the nearest neighbour in instance space and labelling the unknown instance with the same class label
as that of the located (known) neighbour. This approach is often referred to as a nearest neighbour
3202
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
classifier. The downside of this simple approach is the lack of robustness that characterize the
resulting classifiers. The high degree of local sensitivity makes nearest neighbour classifiers highly
susceptible to noise in the training data. More robust models can be achieved by locating k, where k
> 1, neighbours and letting the majority vote decide the outcome of the class labelling. A higher
value of k results in a smoother, less locally sensitive, function. The nearest neighbour classifier can
be regarded as a special case of the more general k-nearest neighbours classifier, hereafter referred
to as a kNN classifier.
In pattern recognition,the k nearest neighbor algorithm (kNN,in short) is a non- parametric
method used for classification and regression. In both cases,the input consists of the k closest
training examples in the feature space. The output depends on whether kNN is used for
classification or regression.
In kNN classification,the output is a class membership. An object is classified by a
majority vote of its neighbours,with the object being assigned to the class most
common among its k nearest neighbors (k is a positive integer,typically small).If
k=1, then the object is simply assigned to the class of that single nearest neighbor.
In kNN regression, the output is the property value for the object. This value is the
average of the values of its K nearest neighbor.
kNN is a type of instance-based learning, or lazy learning, here the function is only approximated
locally and all computation is deferred until classification. The kNN algorithm is among the simplest
of all machine learning algorithms.
Both for classification and regression, it can be useful to weight the contributions of the
neighbors,so that the nearest neighbors contribute more to the average than the more distant ones.
The neighbors are taken from a set of objects for which the class (for kNN regression) is known.This
can be thought of as the training set for the algorithm,though no explicit training step is required.
The training examples are vectors in a multidimensional feature space, each with a class
label. The training phase of the algorithm consists only of storing the feature vectors and class labels
of the training samples. In the classification phase, k is a user-defined constant,and an unlabeled
vector is classified by assigning the label which is most frequent among the k training samples
nearest to that query point.
3.3 Abnormal Visual Events Detection
In this section, a method for abnormal event detection is proposed. For a given scene in video
streams, suppose that a set of training frames {I1 . . . In} depicting the normal behavior is accessible.
Unusual conduct is characterized as the occasion straying from the preparation set conduct. The
general development distinguishing unusual occasions is presented underneath.
Step 1: The first step comprises of figuring the optical flow at gray scale.Then Otsu’s threshold is
applied to convert grayscale image to binary image. The Horn-Schunck optical flow method is
applied to acquire low level movement features at each pixel of training frames. This step can be
displayed as:
(5)
where {I1, I2, . . . , In} are n training normal frames, {OP1, OP2, . . . , OPn } are the corresponding
optical flows obtained by HS method of normal training frames.
Step 2: The second step is calculating the histogram of optical flow orientation (HOFO) of the
training frames. Fig. 3.2 illustrates the details of this step. This step can be generalized as:
3203
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
(6)
where {F1, F2, . . . , Fn } are the HOFO descriptors of the training frames.
Step 3: The third step is applying KNN classifier to the HOFO descriptors of the training frames to
obtain the output. This step is described in the equation below:
{F1,F2,…Fn} {knn1,knn2,…knnn} (7)
where {knn1,knn2,…knnn} are knn vectors which are the minority of the training vectors {F1, F2, . .
. , Fn} adding to the meaning of the decision function.
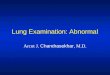
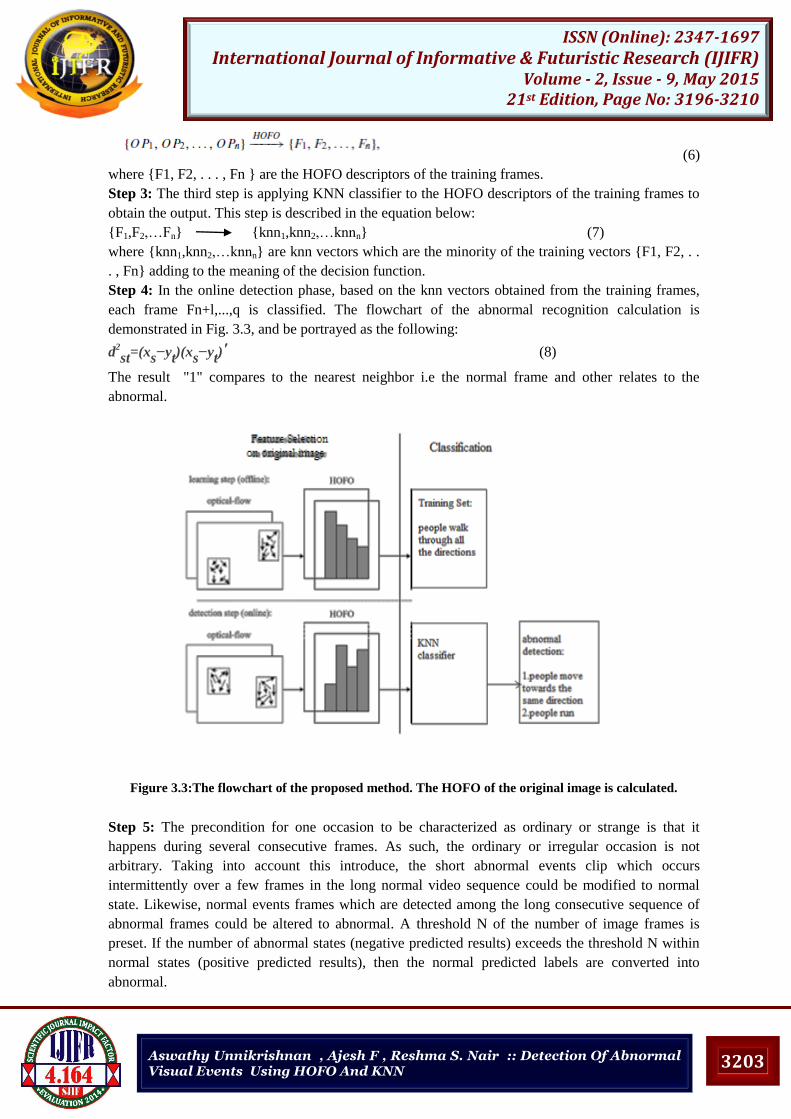
Step 4: In the online detection phase, based on the knn vectors obtained from the training frames,
each frame Fn+l,...,q is classified. The flowchart of the abnormal recognition calculation is
demonstrated in Fig. 3.3, and be portrayed as the following:
d2
st=(xs−yt)(xs−yt)′ (8)
The result "1" compares to the nearest neighbor i.e the normal frame and other relates to the
abnormal.
Figure 3.3:The flowchart of the proposed method. The HOFO of the original image is calculated.
Step 5: The precondition for one occasion to be characterized as ordinary or strange is that it
happens during several consecutive frames. As such, the ordinary or irregular occasion is not
arbitrary. Taking into account this introduce, the short abnormal events clip which occurs
intermittently over a few frames in the long normal video sequence could be modified to normal
state. Likewise, normal events frames which are detected among the long consecutive sequence of
abnormal frames could be altered to abnormal. A threshold N of the number of image frames is
preset. If the number of abnormal states (negative predicted results) exceeds the threshold N within
normal states (positive predicted results), then the normal predicted labels are converted into
abnormal.

3204
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
In the event of a stationary cam, foreground segregation gets to be possible by utilizing a change
detection algorithm. Tuzel introduced a background subtraction algorithm to provide robust
background segregation. In this strategy, a Bayesian methodology displayed every pixel as a blend
of layered Gaussian variables. Recursive Bayesian estimation was then performed to update the
background parameters with a specific end goal to protect the multi-modality of the background
model, furthermore to consequently focus the number of active layers for every pixel. The connected
components are labeled relative to the binary foreground image. One global frame is presented by
several moving foreground components.
The white rectangles in Fig. 3.4 demonstrate the associated moving segments of the frame. The
white ellipse ellipse labels a person who is not moving in consecutive frames, thus this person is not
detected as a foreground blob. In the following, we propose a fast implementation of the abnormal
detection algorithm based on the foreground pixels.
Figure 3.4. The foreground of one frame.
Step 1: The first step comprises of computing the optical flow feature of the foreground image. The
training frames are processed via HS optical flow method. Then the optical flow on the foreground
is extracted. This strategy can be portrayed as:
(9)
where {I1, I2, . . . , In } are the training normal frames, are the relating optical flows of the training
foreground frames.
Step 2: The second step is calculating the HOFO of training foreground frames. The representation
of choosing the features of the foreground image is shown in is indicated in Fig. 3.5. The HOFO is
computed on the global foreground image, the background area is not considered when the HOFO is
being calculated. The time ratio between computing the HOFO of foreground patches and
computing the HOFO of the whole image is where is the area of the foreground,
is the area of the whole image.

3205
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
Figure 3.5 :Feature selection. Compute the HOFO on the foreground images.
For instance, in the plaza scene, the ratio between the average time of computing one whole image
HOFO and the time of computing one foreground image is 3.6. Noted that, for fixed camera scenes,
the foreground can be reasonably extracted by some very quick (yet not efficient) methods, such as
median filter and frame difference. In fact, the poor result of the background subtraction method
does not seriously impact the performances of the abnormal event detection. Besides, with the
proposed state transition model , the influence of the illumination variations in few frames is also
limited. The step can be described in the following expression:
(10)
where are the HOFO descriptors of the preparation closer view outlines.
Step 3: The third step is applying kNN to the HOFO descriptors of the preparation frames to acquire
the knn vector. This step is depicted in the mathematical statement beneath:
{F1,F2,…Fn} {knn1,knn2,…knnn} (11)
where {knn1,knn2,…knnn}are KNN vectors which are the minority of the training vectors {F1, F2, . .
. , Fn} adding to the meaning of the decision function.
Step 4: In the online discovery stage, taking into account the knn vectors got from the preparation
outlines, every frame Fn+l,...,q is arranged. The flowchart of the irregular recognition calculation
and be portrayed as the accompanying:
d2
st=(xs−yt)(xs−yt)′ (12)
The result "1" compares to the typical frame, "−1" relates to the irregular casing.
Step 5: The precondition for one occasion to be characterized as ordinary or strange is that it
happens during several consecutive frames.As such, the ordinary or irregular occasion is not
arbitrary. Taking into account this introduce, the short abnormal events clip which occurs
intermittently over a few frames in the long normal video sequence could be modified to normal
state. Likewise, normal events frames which are detected among the long consecutive sequence of
abnormal frames could be altered to abnormal. A threshold N of the number of image frames is
3206
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
preset. If the number of abnormal states (negative predicted results) exceeds the threshold N within
normal states (positive predicted results), then the normal predicted labels are converted into
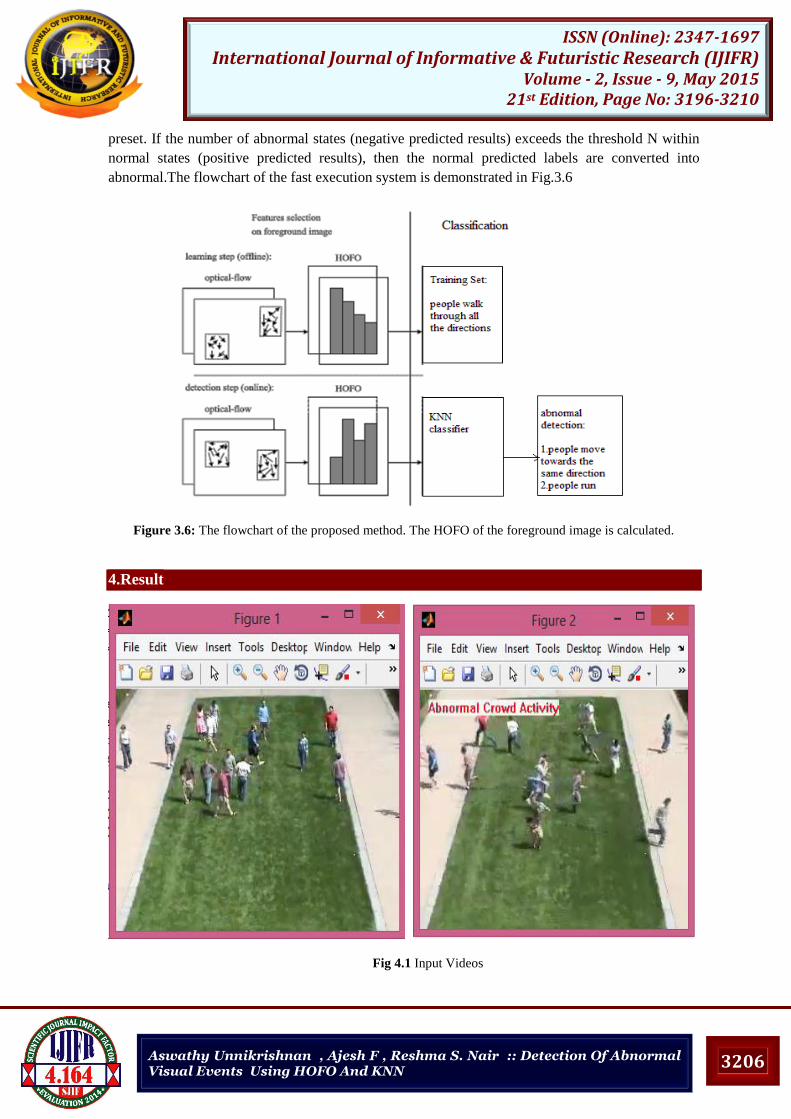
abnormal.The flowchart of the fast execution system is demonstrated in Fig.3.6
Figure 3.6: The flowchart of the proposed method. The HOFO of the foreground image is calculated.
4.Result
Fig 4.1 Input Videos
3207
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
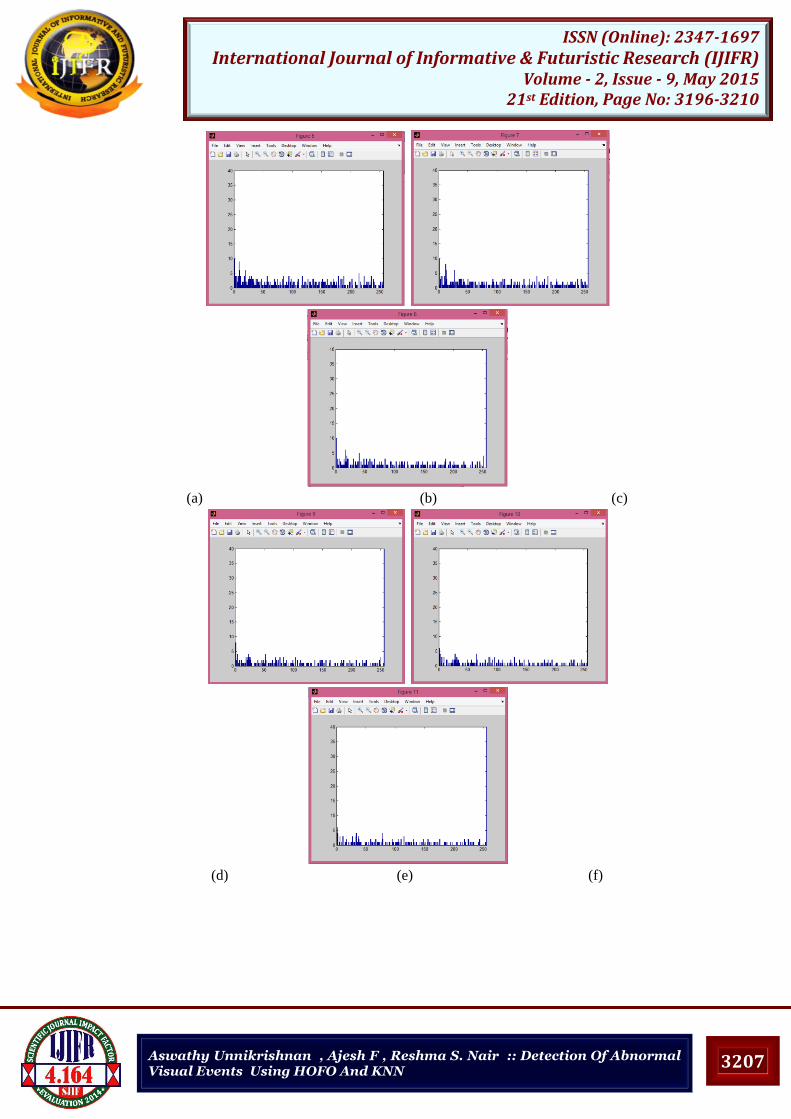
(a) (b) (c)
(d) (e) (f)
3208
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
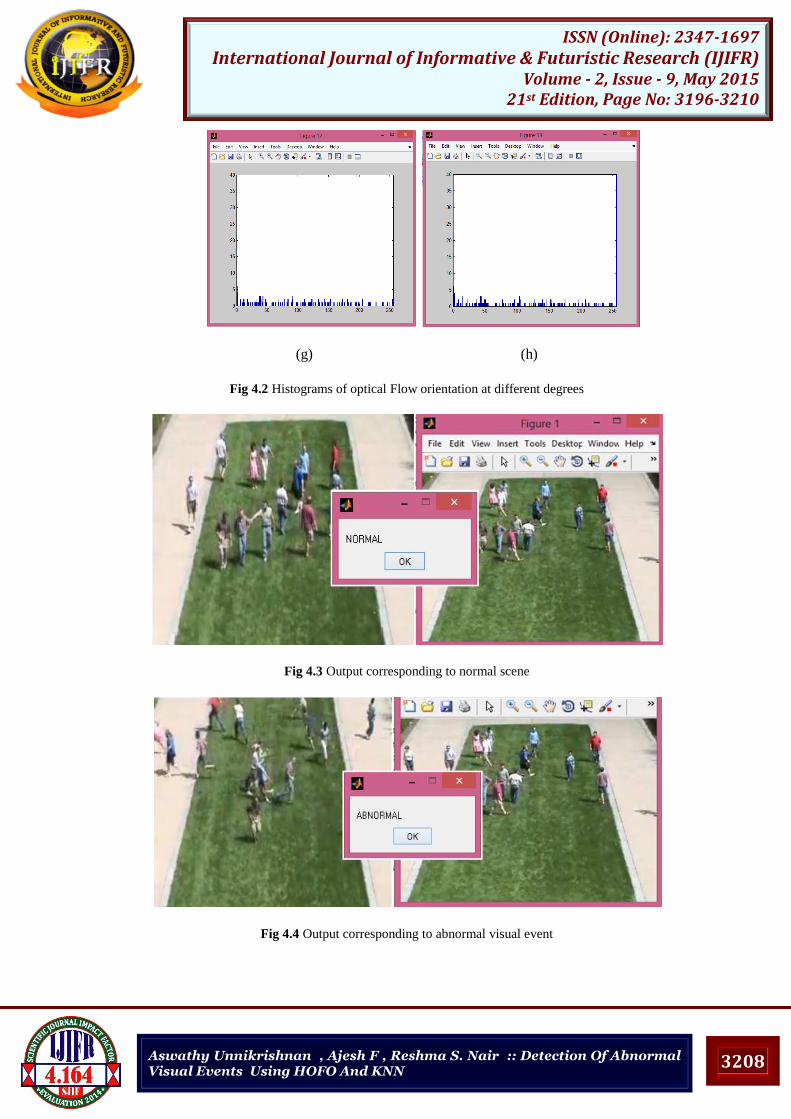
(g) (h)
Fig 4.2 Histograms of optical Flow orientation at different degrees
Fig 4.3 Output corresponding to normal scene
Fig 4.4 Output corresponding to abnormal visual event
3209
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
5. Conclusion
A strategy for abnormal event detection of the global frame is proposed. The method consists of two
components: computing histogram of optical flow orientation (HOFO), and applying a kNN
classifier for classification. The HOFO feature descriptor is computed on the original image, and
also on the foreground image, which is obtained after applying background subtraction for fast
implementation. The images are thresholded using Otsu’s method. The proposed detection algorithm
has been tested on several video datasets yielding successful results in detecting abnormal events.
The abnormal detection may be applied on a region of interest or a specific tracked object.
Automatic region of interest extraction can be based on interest point/region detection, contour
detection, human pictorial structure based detection, etc. From a machine learning perspective,
sparse representation and deep learning theories can be used to enhance the learning and the
classification performances. Additionally, detecting minor deviations in visual scenes and managing
more complex situations are among our perspectives.
References
[1] Tian Wang and Hichem Snoussi, ―Detection of Abnormal Visual Events via Global Optical Flow
Orientation Histogram‖, IEEE Trans. On Information Forensics and Security, vol. 9, No. 6, June 2014.
[2] O. P. Popoola and K. Wang, ―Video-based abnormal human behavior recognition—A review,‖ IEEE
Trans. Syst., Man, Cybern. C, Appl. Rev., vol. 42, no. 6, pp. 865–878, Nov. 2012.
[3] R. T. Collins et al., A System for Video Surveillance and Monitoring, vol. 2. Pittsburgh, PA, USA:
Carnegie Mellon Univ., 2000.
[4] G. Lavee, E. Rivlin, and M. Rudzsky, ―Understanding video events: A survey of methods for automatic
interpretation of semantic occurrences in video,‖ Technion-Israel Inst. Technol., Haifa, Israel, Tech. Rep. CIS-
2009-06, 2009.
[5] G. Lavee, E. Rivlin, and M. Rudzsky, ―Understanding video events: A survey of methods for automatic
interpretation of semantic occurrences in video,‖ IEEE Trans. Syst. Man, Cybern. C, Appl. Rev., vol. 39, no.
5, pp. 489–504, Sep. 2009.
[6] D. Kosmopoulos and S. P. Chatzis, ―Robust visual behavior recognition,‖ IEEE Signal Process. Mag., vol.
27, no. 5, pp. 34–45, Sep. 2010.
[7] Á. Utasi and L. Czúni, ―Detection of unusual optical flow patterns by multilevel hidden Markov models,‖
Opt. Eng., vol. 49, no. 1, p. 017201, 2010.
[8] T. Xiang and S. Gong, ―Incremental and adaptive abnormal behavior detection,‖ Comput. Vis. Image
Understand., vol. 111, no. 1, pp. 59–73, 2008.
[9] T. Xiang and S. Gong, ―Video behaviour profiling and abnormality detection without manual labelling,‖ in
Proc. IEEE 10th ICCV, vol. 2. Oct. 2005, pp. 1238–1245.
[10] T. S. Haines and T. Xiang, ―Delta-dual hierarchical Dirichlet processes: A pragmatic abnormal behaviour
detector,‖ in Proc. IEEE ICCV, Nov. 2011, pp. 2198–2205.
[11] J. Varadarajan and J.-M. Odobez, ―Topic models for scene analysis and abnormality detection,‖ in Proc.
12th ICCV Workshops, 2009, pp. 1338–1345.
[12] S. Kwak and H. Byun, ―Detection of dominant flow and abnormal events in surveillance video,‖ Opt.
Eng., vol. 50, no. 2, pp. 027202-1–027202-8, 2011.
[13] J. Kim and K. Grauman, ―Observe locally, infer globally: A space-time MRF for detecting abnormal
activities with incremental updates,‖ in Proc. IEEE Conf. CVPR, Jun. 2009, pp. 2921–2928.
[14] Y. Benezeth, P.-M. Jodoin, and V. Saligrama, ―Abnormality detection using low-level co-occurring
events,‖ Pattern Recognit. Lett., vol. 32, no. 3, pp. 423–431, 2011.
[15] A. Adam, E. Rivlin, I. Shimshoni, and D. Reinitz, ―Robust realtime unusual event detection using
multiple fixed-location monitors,‖ IEEE Trans. Pattern Anal. Mach. Intell., vol. 30, no. 3, pp. 555–560, Mar.
2008.
[16] M. C. Casey, D. L. Hickman, A. Pavlou, and J. R. Sadler, ―Smallscale anomaly detection in panoramic
imaging using neural models of low-level vision,‖ Proc. SPIE, vol. 8042, pp. 80420X-1–80420X-11, Jun.
2011.

3210
ISSN (Online): 2347-1697 International Journal of Informative & Futuristic Research (IJIFR)
Volume - 2, Issue - 9, May 2015 21st Edition, Page No: 3196-3210
Aswathy Unnikrishnan , Ajesh F , Reshma S. Nair :: Detection Of Abnormal Visual Events Using HOFO And KNN
[17] O. Boiman and M. Irani, ―Detecting irregularities in images and in video,‖ Int. J. Comput. Vis., vol. 74,
no. 1, pp. 17–31, 2007.
[18] C. Bregler, ―Learning and recognizing human dynamics in video sequences,‖ in Proc. IEEE Conf. CVPR,
Jun. 1997, pp. 568–574.
[19] A. F. Bobick and J. W. Davis, ―The recognition of human movement using temporal templates,‖ IEEE
Trans. Pattern Anal. Mach. Intell., vol. 23, no. 3, pp. 257–267, Mar. 2001.
[20] Y. Chen, G. Liang, K. K. Lee, and Y. Xu, ―Abnormal behavior detection by multi-SVM-based Bayesian
network,‖ in Proc. ICIA, Jul. 2007, pp. 298–303.
[21] C. Schuldt, I. Laptev, and B. Caputo, ―Recognizing human actions: A local SVM approach,‖ in Proc. 17th
ICPR, vol. 3. 2004, pp. 32–36.
[22] B. Yao and L. Fei-Fei, ―Modeling mutual context of object and human pose in human-object interaction
activities,‖ in Proc. IEEE Conf. CVPR, Jun. 2010, pp. 17–24.
[23] N. Dalal, B. Triggs, and C. Schmid, ―Human detection using oriented histograms of flow and
appearance,‖ in Proc. ECCV, 2006, pp. 428–441.
[24] N. Dalal, ―Finding people in images and videos,‖ Ph.D. dissertation, Dept. Sci. Environ., Inst. Nat.
Polytech. de Grenoble-INPG, Saint-Martin-d’Hères, France, 2006.
[25] I. Laptev, M. Marszalek, C. Schmid, and B. Rozenfeld, ―Learning realistic human actions from movies,‖
in Proc. IEEE Conf. CVPR, Jun. 2008, pp. 1–8.
[26] T.Wang, H. Snoussi, and F. Smach, ―Detection of visual abnormal events via one-class SVM,‖ in Proc.
Int. Conf. Pattern Recognit. IPCV, vol. 1. 2012, pp. 113–119.
[27] T. Wang and H. Snoussi, ―Histograms of optical flow orientation for visual abnormal events detection,‖
in Proc. IEEE 9th Int. Conf. AVSS, Sep. 2012, pp. 13–18.
[28] UMN, Minneapolis, MN, USA. (2006). Unusual Crowd Activity Dataset of University of Minnesota,
Department of Computer Science and Engineering [Online]. Available:
http://mha.cs.umn.edu/movies/crowdactivity-all.avi
[29] PETS, Vellore, India. (2009). Performance Evaluation of Tracking and Surveillance (PETS) 2009
Benchmark Data. Multisensor Sequences Containing Different Crowd Activities [Online]. Available:
http://www.cvg.rdg.ac.uk/pets2009/a.html
[30] B. K. Horn and B. G. Schunck, ―Determining optical flow,‖ Artif. Intell., vol. 17, no. 1, pp. 185–203,
1981.
[31] N. Cristianini and J. Shawe-Taylor, An Introduction to Support Vector Machines and Other Kernel-
Based Learning Methods. Cambridge, U.K.: Cambridge Univ. Press, 2000.
[32] B. Schölkopf and A. J. Smola, Learning With Kernels: Support Vector Machines, Regularization,
Optimization and Beyond. Cambridge, MA, USA: MIT Press, 2002.
[33] R. Mehran, A. Oyama, and M. Shah, ―Abnormal crowd behavior detection using social force model,‖ in
Proc. IEEE Conf. CVPR, Miami, FL, USA, Jun. 2009, pp. 935–942.
7. BIOGRAPHIES
1st. Miss.Aswathy Unnikrishnan is an M.Tech Computer Science and Engineering student in Musaliar
College of Engineering And Technology, Pathanamthitta. She received B.Tech degree in Information
Technology from Mahatma Gandhi University. Current interests are Information Forensics and Security,
Digital Image Processing, Pattern Recognition, Cyber Security.
2nd. Mr. Ajesh F is presently working as an Asst. Professor in the Department of Computer Science and
Engineering, Musaliar College Of Engineering And Technology, Pathanamthitta under MG University.
He completed BTech in Computer Science And Engineering from Cochin University of Science and
Technology in the year 2005 and ME in Computer Science and Engineering from Francis Xavier
Engineering College under Anna University. He published 2 International Journals, 4 National Journals.
His areas of interest are Networks, Natural Language Processing and Cyber Security.
3rd. Miss. Reshma S Nair is currently doing M.Tech in Computer Science and Engineering at Musaliar
College Of Engineering And Technology. She pursed the B.Tech degree in Computer Science And
Engineering from Mahatma Gandhi University. Current interests are Digital Image Processing, BigData
Processing, Information Forensics and Security.