-
8/2/2019 Controls Class Notes-1
1/47
AE 21008
INTRODUCTION TO FLIGHT VEHICLE
CONTROLS
-
8/2/2019 Controls Class Notes-1
2/47
DEFINITIONS
Controlled Variable:
Typically the output variable, or parameter, or
condition of the system, which is measured and
controlled.
Manipulated Variable:
Typically the variable that is adjusted or controlled
or varied by the controller to bring the ControlledVariable to a
desired value.
-
8/2/2019 Controls Class Notes-1
3/47
DEFINITIONS
Plant:
A piece of equipment, or parts functioning together to
perform a particular operation.
Process: An Operation to be controlled
System: A combination of
components/equipment to perform an objective.
Disturbance: Undesirable signal(Internal/external) that affects
the value of the
System-Output.
-
8/2/2019 Controls Class Notes-1
4/47
DEFINITIONS
Feedback Control:
An operation that keeps the output within
desirable limits, when beset by a disturbance, by
adjusting the Manipulated Variable(s).
Note: Predictable disturbances are
compensated for by internal adjustments
within the system. Unpredictable disturbancesare handled by the
Feedback Control.
-
8/2/2019 Controls Class Notes-1
5/47
DEFINITIONS
Open Loop Control System:
Output not compared with reference input.
Typical systems operating on a time or seasonal
basis.
Simple construction and ease of maintenance.
Less expensive than Closed Loop System
No Stability Issues
Convenient when output is difficult to measure, or
economically no feasible.
-
8/2/2019 Controls Class Notes-1
6/47
DEFINITIONS
Closed Loop Control System:
A feed-back system that compares the output to adesired level of
the controlled variable input,
determines the difference (error signal) andadjusts the
Manipulated variable to make thedifference, or the error signal to
a prescribedvalue.
Handles unpredictable external disturbance
Stability is a major issue and if not addressedproperly, may
lead to oscillations in the system.
-
8/2/2019 Controls Class Notes-1
7/47
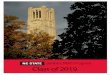
EXAMPLE
Input
(Manipulated
Variable)
Process
Output
(Controlled
Variable)
Design an Aircraft Cabin Heating System
-
8/2/2019 Controls Class Notes-1
8/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
9/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
10/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
11/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
12/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
13/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
14/47
COMPLEX VARIABLES
-
8/2/2019 Controls Class Notes-1
15/47
POLES, ZEROS AND SINGULARITY
Definitions:
Ordinary Points: Points where the function G(s) is
analytic.
Singular Points: Points where the function G(S) is
not analytic.
Poles: Specific Singular points where G(s) or its
derivatives approach infinity.Zeros: Specific Singular points
where G(s) equals
zero.
-
8/2/2019 Controls Class Notes-1
16/47
POLES, ZEROS AND SINGULARITY
-
8/2/2019 Controls Class Notes-1
17/47
POLES, ZEROS AND SINGULARITY
-
8/2/2019 Controls Class Notes-1
18/47
EULERS THEOREM
-
8/2/2019 Controls Class Notes-1
19/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
20/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
21/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
22/47
LAPLACE TRANSFORM
All signals that can be physically generated have
Laplace Transform, i.e., the Laplace Transform
exists, i.e., the Laplace integral converges and is of
exponential order. The conditions of piecewisecontinuity and
exponential order make the function
f(t) transformable in the Laplace domain, and these
conditions are sufficient for most applications.
Discussion on signal convergence and divergence.
-
8/2/2019 Controls Class Notes-1
23/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
24/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
25/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
26/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
27/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
28/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
29/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
30/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
31/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
32/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
33/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
34/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
35/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
36/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
37/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
38/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
39/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
40/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
41/47
LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
42/47
LAPLACE TRANSFORM
Summary:
Differentiation in the time domain corresponds to
amultiplication by s in the Laplace-domain.
Integration in the time domain corresponds to adivision by s in
the Laplace-domain.
Differentiation in the Laplace-domain correspondsto a
multiplication by t in the time domain (with asign change).
Integration in the Laplace-domain corresponds to adivision by t
in the time domain.
-
8/2/2019 Controls Class Notes-1
43/47
INVERSE LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
44/47
INVERSE LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
45/47
INVERSE LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
46/47
INVERSE LAPLACE TRANSFORM
-
8/2/2019 Controls Class Notes-1
47/47
INVERSE LAPLACE TRANSFORM