Embed Size (px)
Citation preview

UPTEC E 18 002
Examensarbete 30 hpFebruari 2018
Construction, testing and verification of
a brushless excitation system with wireless
control of the field current in a synchronous
generator
Rickard LarssonKenny Andersson

Teknisk- naturvetenskaplig fakultet UTH-enheten Besöksadress: Ångströmlaboratoriet Lägerhyddsvägen 1 Hus 4, Plan 0 Postadress: Box 536 751 21 Uppsala Telefon: 018 – 471 30 03 Telefax: 018 – 471 30 00 Hemsida: http://www.teknat.uu.se/student
Abstract
Construction, testing and verification of a brushlessexcitation system with wireless control of the fieldcurrent in a synchronous generatorRickard Larsson, Kenny Andersson
Synchronous generators have been used in hydropower from more than a centurywhere, traditionally, the field current is transferred to the rotor using slip rings andcarbon brushes. There are some major disadvantages following the use staticexcitation; regular and expensive maintenance, as well as a source of carbon dustwhich, due to buildup, may cause short circuits. To avoid these problems associatedwith slip ring exciter systems, a system that use induction to transfer power to therotor could be used instead.
Systems that utilize brushless excitation today usually regulates the current bycontrolling the magnetization of the exciter stator, which is comparably slower thantheir static counterparts. In order to allow for swift regulation of the field currentfrom a brushless exciter, required power electronics and controllers have to bepresent on the rotor shaft instead. The aim of this project is to start investigating ifcommercially available products, which are originally indented to be used in astationary environment, could accomplish this.
The results from this study shows that it is possible to use such products to controlthe field current. The components were found to withstand the exposure of highg-forces and vibrations, albeit only during the relatively small amount of time in whichrotary testing was performed. As such there is no certainty that the componentswould remain functional for the considerably longer time that any commercial usewould require them to.
ISSN: 1654-7616, UPTEC E 18 002Examinator: Tomas NygrenÄmnesgranskare: Urban LundinHandledare: Eyuel Tibebu

Acknowledgementes
We would like to give our sincere thanks to Mats Wahlén and our supervisor Eyuel Tibebu atSvea Power for giving us this opportunity to work with something we found very intriguing andfor all the support along the way.
We would also like to thank our reviewer Urban Lundin as well as Fredrik Evestedt and JosePerez at Uppsala University for their guidance during this project.

Svensk Sammanfattning
Synkrongeneratorer har använts inom vattenkraft sedan lång tid tillbaka där rotorn traditionelltsett magnetiseras med hjälp av släpringar och kolborstar. Användning av denna typ av magne-tisering medför däremot stora kostnader och problem gällande underhåll då kolborstarna slits neroch sprider koldamm, som i värsta fall kan orsaka en kortslutning. Dessa problem kan dock und-vikas genom att frångå matning genom direktkontakt och istället överföra energin med hjälp avinduktion, så kallade borstlösa matare.
Magnetiseringssystem som använder sig av konventionell borstlös matning styr rotorströmmengenom att reglera magnetiseringen av matarstatorn där endast passiv likriktning sker på denroterande sidan. Den sortens styrning är vanligtvis långsammare än styrningen av statisk mag-netisering. För snabb reglering av rotorströmmen vid borstlös matning krävs därför placering avaktiv kraftelektronik samt styrsystem på rotoraxeln. Vårt uppdrag är att påbörja en undersökningom kommersiella produkter som ursprungligen är gjorda för att sitta i en stationär miljö kan utföradetta.
Resultatet från denna rapport visar på att det är möjligt att använda denna typ av produkterför att styra rotorströmmen. Komponenterna klarade av påfrestningarna från g-krafterna såvälsom vibrationerna, om än bara under den relativt korta tiden som de roterande testerna utfördes.Således finns det inga garantier att komponenterna kommer att bibehålla sin funktionalitet underden betydligt längre tid som vid kommersiell användning skulle krävas.

Abbreviations
DC Direct Current
AC Alternating Current
PM Permanent Magnet
BT Bluetooth
FHSS Frequency-Hopping Spread Spectrum
PID Proportional-Integral-Derivative
SCR Silicon Controlled Rectifier
PLL Phase Locked Loop
I/O Input/Output
SE Structural Enclosure
RPM Revolutions Per Minute
GUI Graphical User Interface

Contents
1 Introduction 11.1 Project background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Project description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Theory 42.1 Synchronous generators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Brushless excitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 The thyristor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3.1 Bridge rectifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4 Bluetooth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.5 Hall effect measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.6 Torque pulsation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Method 73.1 System topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.2.1 ILB BT ADIO MUX-OMNI . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2.2 OZSCR2100 firing board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2.2.1 Oztek power studio . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2.3 Power supply unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.4 SKKT 92 thyristor pack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.5 Peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 Stationary tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.3.1 Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 Structural enclosure and assembly . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.5 Rotating tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.5.1 Risk management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.5.2 Monitoring system functionality . . . . . . . . . . . . . . . . . . . . . . . . 153.5.3 Effects from torque pulsation . . . . . . . . . . . . . . . . . . . . . . . . . . 163.5.4 Component durability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 Results 174.1 Stationary tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.1.1 System step response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.1.2 Six-/Twelve-pulse system functionality . . . . . . . . . . . . . . . . . . . . . 18
4.2 Rotating tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2.1 Component durability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2.2 System behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.2.3 Measured vibrations from torque pulsation . . . . . . . . . . . . . . . . . . 22
5 Discussion and conclusions 25
6 Future work 26
References 27
Appendix 28

1 Introduction
Synchronous generators have been used for more than a century and is today a very integralpart of any power grid. These machines are responsible for converting the mechanical energyproduced by a turbine to electrical energy that can be transferred over the grid. The use ofsynchronous generators are predominant in hydro-power where they are also used to stabilize thegrid as regulation capacity against load variations and intermittent power sources. The large size ofsuch generators also means that their inertia cancels out smaller, and faster, frequency fluctuationson the grid.
In order to balance the grid both active and reactive power has to be maintained and this iswhere the excitation system is important. By increasing the current through the field windings ofthe rotor the generator can act as a source of reactive power whenever it is needed, while reducingit allows for the generator to absorb reactive power. Adjusting the field current is also one way tokeep the output voltages stable.
Traditionally excitation of the rotor is done by applying a direct current (DC) on the fieldwinding, through slip rings, with the use of carbon brushes. Advantages of such a solution includesfast step response which is crucial for regulating purposes and is therefore still the main systembeing used on large hydro power generators. On the other hand the maintenance needed is highas the carbon brushes are in physical contact with the rotating slip rings, this leads to wearand tear, causing deposits of carbon dust to build up in the generator, which ultimately couldlead to short circuits. Brushless excitation solves this problem as there is no galvanic contactbetween the stationary and rotating sides. Such an exciter could generally be described as anouter pole generator, that is attached to the same shaft as the main generator, with its output onthe rotating side. The produced alternating current (AC) is then rectified and used to magnetizethe field windings of the main generator.
Conventional rotating exciters using a diode bridge are usually considered less attractive thantheir stationary counterparts due to a comparably slow response time, restricting regulatory capa-bilities of the generator.
This problem arise from the fact that there is no direct control on the rotating side of theexciter and that a negative field voltage for fast de-excitation cannot be applied. One solutionwhich has been put forth is the use of a wirelessly controlled thyristor bridge, indeed proving thatbrushless excitation with a fast response time is possible. However such a solution is today verytailor-made and expensive.
1

1.1 Project backgroundSwedish Electrical and Power Control AB, SVEA Power for short, want to study the possibility ofcreating a 12-pulse excitation system for use in the high g-force environment caused by turning ofa rotor.
This project is being done in collaboration with the Division of Electricity at Uppsala University,and as such testing will ultimately be done using an experimental generator called SVANTE. Thetest rig is a salient pole synchronous generator equipped with a brushless exciter that can beconfigured to produce either 3 or 6 phases for use in 6- or 12-pulse rectifying respectively.
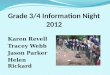
Physical and electrical specifications of SVANTE can be seen in table 1. Furthermore anoverview of the generator is shown in fig.1.
Parameter ValueFrequency 50HzNumber of pole pairs 6Speed 500rpmSlots per pole and phase 3Number of stator slots 108Coil pitch 9Stator inner diameter 725mmStator length 303mmAir gap length 8.4mmPower of driving motor 75kWRotor weight 900kgStator weight 700kg
Table 1: Electrical and physicalproperties[1].
Figure 1: CAD drawing of the test rig.
2

1.2 Project descriptionThis project aims to study the possibility of creating a part of an excitation system from com-mercially available products, not originally intended for use in a rotating environment, in order tobring down both cost and complexity of creating such a system.
Initially, stationary testing and designing of the system will be done simultaneously in orderto optimize and verify desired functionality before preparing it for rotational tests. Preparationof the system includes assembly of the components inside a structural enclosure to be placed ontop of the generator shaft, additional system functionality testing and finally mounting the wholesystem to the generator.
During rotational testing the system will be exposed to both high g-forces and vibrations thatmight damage the components. Therefore the rotating tests will start at a low speed that will beincrementally increased towards nominal speed, monitoring the system functionality continuously.
For the system to be considered functional it will have to fulfill the requirements stated below:
• Fully functional 12-pulse rectifying using thyristors.
• Wireless transmission of analog and digital signal used for control and monitoring.
• Rotating system being galvanically separated from the stationary side.
• Retained system functionality during and after rotating tests.
• Ability of applying negative field voltage on the rotor winding for faster regulation of theexcitation current.
If system functionality is retained during rotation, measurements of the vibrations stemmingfrom torque pulsation will be measured and analyzed during both 6- and 12-pulse rectifying.
3

2 Theory
2.1 Synchronous generatorsSynchronous generators are machines used for the purpose of converting mechanical energy intoelectrical energy[2]. The rotor in such a machine is usually built as an electromagnet where therotor magnetic field is produced from a DC current in the rotor winding, i.e. field current. Thestator is in turn built using magnetically conductive material as a backbone in order to reducereluctance and guide the magnetic flux around the stator windings. The windings are separatedinto three circuits, producing three phases of output with equal voltage and frequency, where eachphase is shifted 120 electrical degrees from one another.
Turning of the rotor is achieved by applying a torque on the shaft, either from a turbine ora motor, creating a rotating magnetic field inside the generator. This magnetic field, which isconstantly changing from the perspective of the stator windings, induces a voltage in each of thestator windings proportional to the strength of the magnetic field, φ, and rate of rotation in radiansper second, ω.
Es = Kφω (1)
Where K is a constant derived form the physical properties of the machine.As per definition the electrical frequency of the produced voltage in a synchronous generator is
locked to its mechanical rate of rotation. And when coupled to the grid, the electrical frequencydictates this mechanical rate of rotation in accordance with Eq. 2:
nm =120feP
(2)
Where fe is the electrical frequency in Hz, nm the mechanical rotation of the rotor in revolutionsper minute and P the number of poles.
2.2 Brushless excitationExcitation of the rotor is a very integral part of every synchronous generator not using permanentmagnets. As previously explained this is achieved by passing a DC current through the rotorwinding which usually stems from a source separate to the generator itself, transferred over to therotor using slip rings and carbon brushes.
Brushless excitation, however, works by using a smaller generator, with its rotor on the sameshaft as the main rotor, to produce the current needed for excitation. The rotating exciter isessentially a generator with its outputs on the rotating side instead, bypassing the need for agalvanic interface between the rotating and stationary sections. The induced AC voltage thenneeds to be rectified before being fed to the rotor winding.
For the purpose of lowering torque pulsation[3] and DC voltage ripple a rotating exciter canbe designed to produce a six-phase output, thus allowing for the utilization of twelve-pulse recti-fication. Furthermore, the use of brushless excitation with controllable power electronics on therotor shaft increases the fault ride-through capability of a generator, allowing for a higher nominalpower rating than previously possible due to safety margin restrictions[4].
2.3 The thyristorThe thyristor is a solid-state semiconductor device that can be operated in two modes, eitherinhibiting or allowing the conduction of current from anode to cathode. The state in which itoperates is controlled by applying a signal to its gate. Whenever the signal amplitude exceeds acertain threshold in terms of voltage and current it will start conducting, where it will keep onconducting even if the signal were to be removed, and will do so until the primary current throughit reaches zero. As with simple diodes the thyristor also blocks current from flowing in reverse, i.e.from cathode to anode, even when a signal is applied to its gate.
Further properties of the thyristor includes comparably high power ratings and non-proportionalIV characteristics, meaning that it only operates in fully conducting or non-conducting mode,making it suitable as a switch.
4

Figure 2: Physical diagram, schematic and symbol of the thyristor[5].
Physically the thyristor is built up of four layers of alternating P- and N-doped semiconductormaterial as seen in fig 2. It is essentially two transistors in a positive feedback loop, each feedingthe gate of the other one, thus removing the need for further external signals to keep on conducting.
2.3.1 Bridge rectifier
With the use of six (or more) passive or active semiconductor devices arranged in a bridge con-figuration a three-phase AC input can be converted to a DC output. When using diodes in thisconfiguration it is considered a passive bridge rectifier which is the simplest implementation of thistechnology. In such a scenario rectifying of the input happens automatically whenever a pair ofdiodes becomes forward-biased. For more controllability of this process the diodes are replacedwith thyristors, where they not only need to be forward-biased but also, as stated earlier, suppliedwith a firing signal to the gate terminal in order to start conducting. Such a topology can be seenin fig 3 below.
Figure 3: Three-phase bridge rectifier using thyristors.
By using a thyristor based solution the DC voltage and current can be controlled by changingthe firing angle of the signal being applied to the thyristors. The firing angle dictates a delay inelectrical degrees, after voltage crossover, before the firing signal is sent to the thyristor. In theexample below a firing angle of 15 degrees has been specified which is clearly seen in the loadvoltage.
0° 60° 75° 90° 180° 270° 360° 450°
Phase angle [deg]
-200
-150
-100
-50
0
50
100
150
200
Vo
lta
ge
[V
] Voltage cross-over
Figure 4: Voltages over each thyristor and load with a 15 degree firing angle.
5

2.4 BluetoothBluetooth (BT) as an industry standard began in 1998 when Ericsson, IBM, Intel, Nokia, andToshiba started the Bluetooth Special Industry Group (SIG). Their collaboration resulted in aglobal solution for communication in the unlicensed 2.4GHz ISM (industrial, scientific and medical)band for short range wireless devices and was made to replace cables between electronic devices.[6]
One of the features with BT is that it uses a frequency hop transceiver to reduce interferenceand fading and provides many FHSS (Frequency-hopping spread spectrum) carriers. There aretwo different types of BT systems, the first is Basic Rate and the other is Low Energy. The BasicRate version has the option to use Enhanced Data Rate and the Low Energy version has lowercurrent consumption and is overall less complex and thereby reduces the cost of the device. Basicrate and Low Energy supports a bit rate of 1 Megabit per second while Enhanced Data Rate cango up to 2 or 3 Megabit per second.
The connection between the Basic Rate BT devises is established by radio channel with aspecific frequency hopping pattern and a common clock. One of the devices connected provides asynchronization reference and is called a master, the other devices connected are called slaves.[7]
2.5 Hall effect measurementIn order to regulate apparent output power from a generator there needs to be continuous measure-ments of the rotor field current such that it can be used as a regulating parameter. For high powerapplications one suitable current measurement technique is the hall effect measurement technique.It utilizes the magnetic flux created by the current in a conductor by concentrating it a magneticcircuit with a small airgap. In the airgap the hall voltage can be measured with a hall element bymeans of the Lorentz force. This force essentially deflects passing electrons proportionally to themagnetic flux density, and by extension the primary current. The hall voltage is then amplifiedand conditioned to provide an instantaneous measurement of the primary current.
2.6 Torque pulsationTorque pulsation (torque ripple) is the variations in torque from the rotor that causes unwantedvibrations. These vibrations slowly wears down the generator which leads to higher maintenanceand more downtime. [8] One of the many reasons why this occurs is related to the fundamentalfrequency of induced voltages in the exciter. For a 6-pulse system the frequency of the torquepulsations will be six times this fundamental frequency and twelve times for a 12-pulse system. [3]
On way to calculate the torque ripple is with the peak to peak torque difference divided by theaverage torque shown in eq.3. [8]
Tripple =Tmax − Tmin
Tavg∗ 100 (3)
6

3 Method
In this section the process of creating a complete system that fulfills the project requirements andgoals will be discussed. This includes an overview of the system topology, the choice of componentsto be used, preparations for both stationary and, during the later stages of the project, rotatingtesting.
3.1 System topologyIn Figure 5 a simplified overview of the whole system is presented, including both the stationaryand rotating sections. Worth noting is that this is considered a fully functioning realization of thesystem which meets the requirements presented in section 1.2, and as such may not be representa-tive of the end product. A more in depth description of each component can be found under section3.2 while a detailed electrical schematic of the rotating section can be found in the appendix.
Figure 5: Simplified overview of the stationary and rotating sections. Thick lines represent highpower flow.
3.2 Components
3.2.1 ILB BT ADIO MUX-OMNI
The ILB BT ADIO MUX-OMNI from Phoenix Contact is a BT device that is made for industrialuse. It consists of one master and one slave and is able to transmit two analog and 16 digitalsignals bidirectionally.
It has an omnidirectional range between 50 to 100 meters in industry halls with the providedomnidirectional antennas and up to 400 meters outdoors with directional antennas. Although theseranges can vary depending on interferences from external sources. The signal strength is displayedon both the master and the slave device with a bar graph on the front.
Both the slave and the master needs a supply voltage between 19-30VDC with a current of100mA. The devices does not have any supplied software but instead uses a plug and play system.[9]
7

3.2.2 OZSCR2100 firing board
The OZSCR2100 is part of a new generation of SCR (Silicon Controlled Rectifier) firing and controlsolutions from Oztek Corporation. Their purpose is to consolidate a lot of the equipment neededfor rectifying an AC source and providing these in a single product.
A single board can supply firing signals to six individual thyristors and synchronize to the threeAC line phases using a digital PLL (phase locked loop). After synchronization has been achieved,control of the thyristors is dictated by an analog control input signal and the mode of operation,which can be configured in the registry using Oztek Power Studio. The modes of operation are asfollows:
• Phase angle control modeDirect control of the firing phase angle proportional to the analog control input signal, wherethe analog control input signal range defaults to 0-10 V, which in turn yields a 180-0 degreefiring phase angle. This mode of operation is meant to be used when a high-level systemcontroller is present or when wanting to manually control the rectifier output.
• Zero cross control modeControl of the number of AC line cycles in which to fire the thyristors, where the totalamount of AC cycles in one "control cycle" can be specified in the registry by the user usingOztek Power Studio. As such the analog control input signal dictates how many of the totalamount of cycles to fire the thyristors. For example, if the total amount were to be set to 50then a 20% input signal would result in the thyristors being fired for 10 cycles and inhibitedfor 40 cycles before repeating. As with the phase angle control mode it is meant to be usedtogether with an external system controller.
• Closed loop DC voltage control modeA self-regulating control mode of the rectified output voltage. Using this control mode utilizesthe on-board regulation electronics of which the P-, I- and D-parameters, as well as min andmax DC voltage values, can be specified by the user using Oztek Power Studio. Connectionof the DC voltage to the board is required for measurement purposes. In this case the analogcontrol input signal is instead used as a setpoint proportional to the min and max values.
• Closed loop DC current control modeSimilar to the voltage control mode but requires the measurement of DC line current usinga separate and compatible LEM style current sensor. All of the required contacts to operatethe current sensor are supplied by the board which include ±15 V, signal in and ground. Inthis mode the analog control input signal is also used as a setpoint proportional to the minand max DC current values specified in the registry.
The board allows for a plethora of other parameters to be configured in the registry, far to manyto be comprehensibly explained in this section, but some of the more important features for thisproject include:
• Digital I/O pin assignment• Digital I/O polarity selection• Line over-/under-voltage warning threshold• Analog input pin assignment• Analog control input signal mode• Firing angle slew rate• Min-/max-firing angle• Firing pulse width
For monitoring purposes the digital I/O pin assignment will be configured to report the PLLunlocked, board fault, fast inhibit and AC line over-/under- voltage signals on pins 1 through 4.
The digital outputs does not produce any output voltage on their own but are of the type opencollectors, meaning that when a digital signal is reported the pin is connected to digital ground.As such, the digital I/O polarity is configured to reverse all four outputs. By doing this one canrepresent the digital signal as a voltage by connecting a resistor to each port and applying a voltageto the resistor. Thus, whenever a signal is reported the pin becomes separated from digital groundand a voltage can be sensed in-between the resistor and digital output pin.
8

By configuring the analog control input signal mode one can specify whether to control theboard using voltage or current, with the ranges available being 0-10V, 0-5V, 4-20mA and 0-20mA.For simplicity the setting used will be 0-10V. The resulting firing angle will, as previously stated,be proportional to the analog input within the specified range.
Firing of the thyristors is achieved by applying a so called "picket fence" pulse train to their gateterminals. This pulse train is visualized in figure 6 below. It is essentially a series of consecutivepulses, with configurable width and where the first one, pulse A, is of greater magnitude.
Figure 6: Picket fence pulse train. [10]
The larger first pulse ensures a full turn of the thyristor in order to lower the associated switchinglosses, while the following smaller B pulses are used to sustain continuous operation of the thyristorunder light or discontinuous loads[10].
Furthermore, a thyristor needs to be forward biased in order for avalanche breakdown to occur,i.e. turn-ON. As the voltage across the thyristor at voltage cross-over is zero this cannot beachieved. Therefore a minimum possible firing angle can be specified in order to ensure that somevoltage potential exists when the first pulse arrives at the gate terminal, thereby properly utilizingthe pulse train and its function.
3.2.2.1 Oztek power studio
Oztek power studio is a graphical interface for Microsoft Windows that can modify Oztek´s powercontrol products. There are four tabs on the front end that consists of the four main features.The names of the different tabs are “Dashboard", “Instrumentation", “Configuration", and “Soft-ware Upgrade”. The Dashboard provides the most critical information about the system such asfaults, warnings and the status of the device. Instrumentation provides measurement data in moredetail than on the dashboard. There are also various options to choose from and this tab can becustomized to show the data needed for different types of setups. In the configuration tab viewingand modifying of configuration parameters are done. A file named Oztek Config (.ozCfg) loads allthe parameters for the specified control product and shows its default-, min- and max-value forevery parameter. This file can now be edited and saved for easy setup for more than one device.The software update tab is a tool for updating your software to the latest version. [11]
Figure 7: Oztek Power studio GUI showing the instrumentations tab.
9

3.2.3 Power supply unit
QUINT4-PS/1AC/24DC/5 from Phoenix Contact is the AC to DC converter that is used in thiscase to supply both the Oztek cards and the BT device. The input voltage range is 110-230VACand can be connected either with a line to line connection or line to neutral with a frequency rangeof 50-60Hz ±10%. The DC output voltage can be set with a push of a button on the chassis to beanything between 24-29,5VDC.
For safety reasons the QUINT4-PS has a built in gas-filled surge arrester for surge protection.If the voltage gets to high, it ionizes the gas which makes it an effective conductor that connects thevoltage to the ground. When the voltage goes down and reach normal levels then gas will yet againbecome a poor conductor and normal operations can continue. QUINT4-PS is also electronicallyidling-proof and short-circuit-proof and will in the event of an error limit the output voltage.[12]
3.2.4 SKKT 92 thyristor pack
SKKT 92 from Semikron consists or two thyristors in series and therefore three packs are used infig 3 for a 6-pulse application, and six packs for the 12-pulse system. To transfer the heat fromthe SKKT 92 there is an aluminum oxide ceramic isolated metal baseplate on the backside ofthe transistor that transfers the heat to the body it is mounted on. The current ratings on thisthyristor pack is somewhat over-sized for this application but had about the same price as thelower rated ones which lead to that these were chosen.
10

3.2.5 Peripherals
Current measurement
LEM LA 55-P is a closed loop current transducer that in this case is used to measure the DC linkcurrent on the rotor. This hall effect sensor has a conversion ratio of 1:1000. For example if themeasured current is 10A then the output current will be 10mA. Since the analog inputs on theBT device responds to voltage, a measuring resistance Rm have to be added to the output. Thenthe voltage drop across Rm (Vm) is connected to the BT and transfered as an analog signal. Oneof the reasons that this type of current sensor was used is because the control cards has a built in±15V connection for the explicit use of LEM current sensors, so no extra components were needed.
Figure 8: LEM circuit scheme.
ADXL203EB
ADXL203EB from Analog Devices [13] is a small dual axis accelerometer that can measure up to±1.7g in each direction. Both the x- and y-outputs follows Vout = Vg +2.5, where Vg is proportionalto the sensed g-force in either direction. As such the output ranges from 0.8 to 4.2 volts, whereany forces sensed outside this envelope is cut out.
It uses a built in low-pass filter with a default cutoff frequency of 50Hz that can be altered bychanging the capacitors C2 and C3. The values of C2 and C3 can be calculated using Eq.4. [13]
Figure 9: ADXL203EB circuit scheme.[14]
f−3dB =1
2π(32kΩ)Cx,y(4)
For the purposes of measuring vibrations stemming from torque pulsation the sensor will beplaced on the stator side of the rotating exciter. The frequency of these torque pulsations followsFtp = np∗fe, where np is the number of pulses used in the rectification process and fe the electricalfrequency of the rectifier input phases. This results in 300Hz and 600Hz for 6- respectively 12-pulserectification when operating at nominal frequency. As such the low-pass filters has been adjustedto include these frequencies.
11

3.3 Stationary testsStationary testing was the first step in verifying desired functionality of individual componentsand their compatibility with each other. By performing these tests it allowed for optimization ofthe system in a manner that was more time efficient than what would have been possible duringthe later stages of the project. Furthermore, the risk of causing damage to components due to thehigh g-forces and vibrations associated with rotating testing is also removed.
As the complete system will be quite complex and include several different components, testingwas done incrementally, introducing and implementing components one at a time. A more in depthbreakdown of this can be found in section 3.3.1 below.
3.3.1 Approach
As the system is centered around the OZSCR2100 testing started off with only using it separately,experimenting with different configurations and built in functions. Further on the OZSCR2100 wastested using a simple setup of thyristors and loads to achieve rectification of three phases utilizinga potentiometer to synthesize the analog input signal by voltage division.
An interesting aspect regarding the BT modules is their response time, as such these werealso tested independently. By using a simple mechanical switch, simulating an analog pulse to betransmitted, the step response can be analyzed. For the purpose of regulating the field currentusing a high-level controller one has to consider the whole system response, including return of asecond analog signal representing the measured current. This adds, at the very least, yet anotherdelay caused by the BT transmission.
When having tested most of the components separately a system containing and connectingall of these together was constructed. Subsequent testing was done to merely ensure desiredfunctionality for 6-pulse rectifying before adding a second OZSCR2100.
Testing of 12-pulse rectifying was a very important step because of the uncertainty associatedwith running two of the firing boards in parallel and how this would affect their behavior. In orderto simulate the six-phase rotating exciter on SVANTE a transformer connected in a Wye-Delta-11configuration was used. A visualization of such a connection can be seen in fig. 10.
Figure 10: YD11 coupling of a transformer, yielding a 30 degree phase shift (leading) of the outputsrelative to the inputs. H1, H2, H3 and H0 correspond to the three input phases and neutral line,while X1, X2 and X3 correspond to the three output phases.[15]
This effectively creates a second three-phase source which is phase shifted by 30 degrees from theoriginal, simulating the outputs which are present on the rotating exciter in SVANTE.
Connection of the two firing boards were done in such a way that each board and associatedthyristors uses its own three phases to provide half of the output power. This means that theyare completely independent from each other without any master/slave configuration and that thefunction of the 12-pulse rectifying process relies on the fact that the upper and lower conductingthyristors will switch automatically whenever voltage cross-over happens. Which will then be twiceas often compared to regular 6-pulse rectifying. The analog control signal is simply relayed to bothboards without any change in amplitude or timing.
12

3.4 Structural enclosure and assemblyOn the top of the rotor shaft there is a section that fits a structural enclosure (SE) where all therotating components can be mounted seen in fig.1. When designing the SE there is a few factorsthat needs to be considered. The g-forces on the components inside the SE will scale linear withthe radius of the SE. If the radius is small the risk of component breakdown is lower but the testsdoes not become very realistic, also there is not much room to fit all the components. With a largerradius the tests can be considered more realistic and an increased area inside the SE is accessiblefor more optimal solutions regarding component placement and attachment. Consultation withboth Mats Wahlén at Svea Power and Urban Lundin at UU resulted in a SE with a radius of 30cm.
The drawing for the SE was done in Solid Works. Some requirement from the selected workshophad to be met regarding the k-factor of the material and bend radius to match their machines.Stainless steel became the material of choice since it is both robust and non magnetic. The finaldrawings, without its lid, can be seen in fig.11.
Figure 11: CAD drawing of structural enclosure.
When attaching the component in the SE one has to carefully consider where and how to dothis because of the g-forces and in which direction these will act. Apart from the g-forces therewere also vibrations that will require even sturdier fixtures. For more realistic results most of thecomponents were mounted at the edges of the box to be able to test them at the maximum g-forcethe SE has accessible. This also minimize mechanical stresses on the fixtures since most of theg-force will act in a direction perpendicular to the edges. For the components mounted on a circuitboard it is important that they get pushed into the board rather than pulled away. Therefore theposition of every part had to be chosen with that in mind.
Custom-made fixture solutions had to be constructed for every part. Most of the parts werefixated with a rubber mat to both dampen vibrations and electrically isolate these form metal thesurface. Then bolted to the surface with locknuts, loctite and lockwashers. To avoid unnecessaryvibrations the distribution of mass within the enclosure had to be properly balanced. Thereforecomponent of similar weight where fixated on opposite sides inside the enclosure (fig.12).
13

Figure 12: Top view of mounted components
3.5 Rotating testsAfter having verified that the whole system operates as intended while stationary the rotatingtests could finally commence. In this section the setup and preparations for rotary testing will bepresented. Fig.13 shows the rotating enclosure mounted on the rotor shaft.
Figure 13: Structural enclosure mounted on the rotor shaft. Note the BT antenna protruding fromthe box slightly beneath the central shaft.
3.5.1 Risk management
In order to lower the risk of damaging the system before any data could been collected, the rateof rotation was increased incrementally, allowing for testing at sub-nominal frequencies.
Due to the electrical frequency and voltage being fed to the system being dependent on themechanical rotation, the on-board PSU would not work as intended at very low speeds. As sucha stationary auxiliary power source was initially used to provide the necessary voltage to powerthe firing boards and BT module. This was achieved using two slip rings and disconnecting the
14

on-board power supply. The PSU was reconnected later on when testing at higher speeds wereperformed.
Furthermore the output was applied to a stationary load, through yet another pair of slip rings,instead of the rotor winding. This was done in order to minimize the risk of causing harm to thegenerator in case of system failure during high current output. The inductance of said stationaryload was measured to be ∼200mH, whereas the resistance could be varied from 2-14 Ohm in stepsof 2.
3.5.2 Monitoring system functionality
System functionality had to be verified in real-time during testing and as such each firing boardswas configured to send digital signals on all of their available outputs. The signals that were sentwas chosen to be the PLL unlocked, fast inhibit state, board fault and line over/under voltagewarning signals as these are considered relevant pertaining to overall system behavior. Whenevera signal is sent, a LED on the receiving BT module will light up and thus inform the user of itscurrent state.
Figure 14: Bluetooth connections
As the firing boards are designed to operate nominally with an input frequency close to that ofthe electrical grid (50/60Hz) the digital PLL might have difficulty locking onto the input phasesduring lower frequencies and voltages. Therefore testing with an active output may only be donewhenever the PLL is locked, which is indicated by the corresponding LED lighting up as previouslystated.
Further monitoring regarding power output was done by measuring the voltage across andcurrent through the stationary load using a voltage probe and current clamp. The current measuredby the on-board LEM sensor was also sent through the BT link and received on the stationaryside. These measurements are then collected using a PicoScope 4424 which allows for real timeobservations on a computer and easy saving of the data.
Switching between 6- and 12-pulse operation is done by sending either one or both of the signalsneeded to reverse the fast inhibit state otherwise present. As such this can be done during rotationwithout the need for accessing the firing boards using Oztek power studio.
15

3.5.3 Effects from torque pulsation
Vibrations caused by torque pulsation was monitored with ADXL203EB continuously during therotating tests. The main focus for these measurements is to monitor the difference in vibrationsbetween the 6-pulse and 12-pulse configurations. Therefore the accelerometer is mounted as closeto the rotating exciter as possible since the vibrations will be more prominent in proximity to theirsource.
The sensor was wedged in-between two aluminum bars, used to hold the permanent magnetsin place, on top of the rotating exciter stator as seen in fig.15. This allows for any tangentialvibrations to be directly transferred to the sensor.
Figure 15: The ADXL203EB accelerometer in position. The copper colored section is the rotor,while the silver colored bars bolted to the stator are the aforementioned aluminum fixtures.
3.5.4 Component durability
During rotation the components are exposed to both vibrations and high g-forces. At nominal rateof rotation the g-forces applied to the components is almost 85g along the outer edge of the SE inaccordance to eq. 5, where r is the radius and T the period.
a = w2 · r =4 · π2 · rT 2
[m/s2] (5)
It is therefore of great interest to observe the behavior of each component during and aftertesting. Where prolonged exposure to such an environment may be detrimental to circuitry con-taining electrolytic capacitors, electromechanical components, weak solder joints and silica filledfuses amongst other. Detection of any side-effects caused by the g-forces is merely done by mon-itoring the collected data and digital signals being received in real-time. As such any small orinsignificant changes to the components during rotation might be difficult to detect.
16

4 Results
In this chapter a performance review of the constructed excitation system is be presented fromboth the stationary and the rotating tests. Results from both 6- and 12-pulse rectifying is alsopresented.
4.1 Stationary testsThe first tests of each component individually was done without any shortcomings and all com-ponents worked according to their data-sheets. When combining all the components successivelyeverything worked according to plan as well.
4.1.1 System step response
To measure the total system step response a switch was used to change the analog input (signalin) from 0% to 100% instantaneously. The analog input signal was then transmitted to the firingboard via bluetooth resulting in an increased load current that was measured and then transmittedback via bluetooth once again. The time it took from the switching pulse to the load current onthe receiving end to reach 90% of the intended value was approximately 65ms according to fig.16.Tests has also been done with smaller changes to the analog input (0% to 10%) but the total systemstep response was still 65ms. The load current on the receiving end in fig.16 also shows that thebluetooth device filters the analog signal to showing more of an average value than it actually was.Both the LEM and the firing boards reacts a lot faster and can almost be neglected since the vastmajority of the time delay comes from the bluetooth transmission.
0 50 100 150 200 250 300
Time [ms]
-2
0
2
4
6
8
10
12
Co
ntr
ol sig
na
l [V
]
-1
0
1
2
3
4
5
6
Lo
ad
cu
rre
nt
[A]
Signal in
Signal to firing board
Load current (from sensor)
Load current (recieving end)
Figure 16: Total system step response.
When switching of the analog input from 100% to 0% the analog input does not drop instanta-neously to 0%. This is probably due to some capacitance within the analog input on the bluetoothdevice being discharged over time. This can be overcome by coupling the analog input to groundwhen switching, allowing for a faster discharge, instead of just leaving it to float. Unfortunatelythis was not though of during testing and no new tests on this setup were performed.
17

4.1.2 Six-/Twelve-pulse system functionality
Both the six and twelve pulse tests where done with a purely resistive load and with the samefiring angle of 25 degrees. The firing boards in the 12-pulse setup does not have any master-slave connection between them but instead work separate controlling three phases each. Whencomparing fig.17 and fig.18 the resulting current shown in black has less ripple in the 12-pulsecase.
Worth noting is the slower transition of phase currents in the moment of switching when using12-pulse compared to 6-pulse. This behavior is even more prominent at lower firing angles.
0 2 4 6 8 10 12 14 16 18 20
Time [ms]
-6
-4
-2
0
2
4
6
Cu
rren
t [A
]
Figure 17: Phase and load currents during 6-pulse operation.
0 2 4 6 8 10 12 14 16 18 20
Time [ms]
-6
-4
-2
0
2
4
6
Cu
rren
t [A
]
Figure 18: Phase and load currents during 12-pulse operation.
18

4.2 Rotating tests
4.2.1 Component durability
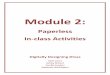
The speeds at which tests were done ranged from 130 to 500 RPM. During these tests no apparentproblems were detected in regards to the high g-forces being applied on the components.
After the tests were done a visual inspection of the components were performed where nocritical defects were detected. The thermal compound used on the thyristors had been smearedout along the inside of the box. This can be seen in fig.19 below and is due to the direction thatthe centripetal force is being applied on the outermost thyristors.
Figure 19: A picture on one of the outer thyristors, showing the thermal compound smeared outfrom its side.
The thermal compound that had been smeared out probably originates from excess amountsthat had been pushed to the sides when bolting down the thyristors during assembly. However,over a longer period of time the layer in-between the thyristor and SE might be at risk of depletion,resulting in a lower thermal conductance between these.
Furthermore, slight bending of a few thyristor drive connectors on the firing boards was alsoobserved, but not enough to be considered dangerous. All in all the total time spent rotating thesystem amounts to approximately one hour divided over several runs and at different speeds, withat least half of that at nominal speed.
4.2.2 System behavior
During incremental spin-up of the generator it was observed that PLL could be achieved at electricalfrequencies as low as 13 Hz, allowing for operation of the system in the span of 130 to 500 RPMas previously stated. As the system proved to be capable of operating all the way up to 500 RPM,results during sub-nominal speeds will be mostly omitted.
Tests were performed using 6- and 12-pulse operation, at different firing angles and load re-sistances. This yielded several different cases where vibrations form torque pulsation could beobserved, differing in frequency and amplitude. More on that will be presented in section 4.2.3.
Later on it was also found that the on-board PSU was powered up and able to provide powerto the components when the input reached an electrical frequency of 26 Hz. Tests also showed that
19

the PSU could sustain supply during full 12-pulse rectifying operation of the firing boards at thisthreshold.
An effect of supplying the PSU using two of the input phases can be seen in fig.20. In 12-pulseoperation irregularities in the output voltage during every sixth firing cycle can be seen. This effectwas also observed during 6-pulse operation although not as prominently.
0 5 10 15 20 25
Time [ms]
0
50
100
150
200
Voltage [V
]
Load voltage during 12- and 6-pulse operation while using the on-board PSU
0 5 10 15 20 25
Time [ms]
0
50
100
150
200
Voltage [V
]
Figure 20: The first plot shows voltage irregularities during 12-pulse operation, affecting everysixth cycle. While the second plot shows the same effects every third cycle during 6-pulse operation.Both during nominal speed. The firing angle used was 63 and 50 degrees for 12- and 6-pulserespectively, this was done to match the average DC output current during both modes.
These effects were even more prominent during sub-nominal speeds, as seen in fig.21, where theline-to-line voltage was lower, thus requiring the PSU to draw a larger current in order to supplythe power required by the components, increasing the voltage losses in the exciter windings.
20

0 5 10 15 20 25 30 35 40 45 50
Time [ms]
0
25
50
75
100
Vo
lta
ge
[V
]
Load voltage while using the on-board PSU at 260 RPM
0 5 10 15 20 25 30 35 40 45 50
Time [ms]
0
25
50
75
100
Vo
lta
ge
[V
]
Figure 21: As in the previous figure both 12- and 6-pulse operation is presented in the figure,where the voltage irregularities can be seen in every sixth and third cycle respectively. Worthnoting is that the frequencies and voltages are lower than before, therefore both the Y- and X-axesare rescaled.
On a separate note the BT communication suffered a packet loss twice during the rotating stepresponse test shown in fig.23. Causing a slight increase in total system delay. Other than that theconnection was stable during all of the tests. In regards to the response time without packet lossthere is little to no change when compared to the stationary tests. The only difference would bedue to the load being highly inductive, resulting in a larger rise-time of the current.
Time [ms]
0 50 100 150 200 250
Cu
rre
nt
[A]
-20
-10
0
10
20Step response without packet loss
Vo
lta
ge
[V
]
-200
-100
0
100
200
Load current (Current clamp)
Load current (LEM sensor)
Load voltage (Voltage probe)
Figure 22: Step response during rotating oper-ation. With the current rise-time equaling ap-proximately 45 ms.
Time [ms]
0 50 100 150 200 250
Curr
ent [A
]
-20
-10
0
10
20Step response with packet loss
Voltage [V
]
-200
-100
0
100
200
Load current (Current clamp)
Load current (LEM sensor)
Load voltage (Voltage probe)
Figure 23: Step response with packet loss dur-ing both current rise and fall, increasing therise-time to about 53 ms.
Furthermore these step responses shows that the excitation system is able to apply a negativefield voltage whenever the firing angle exceeds 90 degrees, thus reversing the power flow anddecreasing the field current at a faster rate than otherwise possible which can be seen in thedifference between rise- and fall-time.
21

4.2.3 Measured vibrations from torque pulsation
The vibrations stemming from torque pulsation in the rotating exciter can be clearly seen in fig.24below. These vibrations have an obvious correlation with the output as they are in phase withthe measured load voltage. The firing angles used were 49 and 63 degrees for 6- and 12-pulserespectively. These were chosen in order to maximize the observed vibrations, simulating a worstcase scenario, but also to match the output current in both cases. The load used had a resistanceof 12 Ohms and an inductance of approximately 200 mH.
0 5 10 15 20 25 30 35 40 45 50
Time [ms]
-4
-2
0
2
4
Vib
ratio
n a
mp
litu
de
[m
/s2]
Measured vibrations and voltage during 6-pulse operation
-200
-100
0
100
200
Vo
lta
ge
[V
]
Raw signal
Filtered signal
Load voltage
0 5 10 15 20 25 30 35 40 45 50
Time [ms]
-4
-2
0
2
4
Vib
ratio
n a
mp
litu
de
[m
/s2]
Measured vibrations and voltage during 12-pulse operation
-200
-100
0
100
200
Vo
lta
ge
[V
]
Raw signal
Filtered signal
Load voltage
Figure 24: Showing load voltage and measured vibrations for the two cases, where the averageDC output was approximately 9.7 A. The filtered vibration signal was created using a first orderlowpass filter with a cutoff frequency of 1kHz.
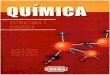
Applying an FFT on the raw vibration signals allows for the frequency spectrum of each signalto be analyzed. The fundamental and harmonic content of each signal is clearly seen in fig.25 whichconfirms that the vibration frequency is tied to the electrical frequency and amount of pulses used.The fundamental components are detected at 300 and 600 Hz for 6- and 12- pulse respectively,whereas the harmonic content can be found at multiples of these frequencies.
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Frequency [Hz]
0
0.2
0.4
0.6
0.8
1
1.2
Vib
ratio
n f
req
ue
ncy c
om
po
ne
nt
ma
gn
itu
de
[m
/s2]
6-Pulse
12-Pulse
Figure 25: FFT of the unfiltered signals represented in previous figure. For reference dottedvertical lines are placed at 300 and 600 Hz respectively. Note the vibrations which can be observedat 50 and 1600 Hz. The 50 Hz component can probably be attributed to electrical interference.
22

In order to observe how the vibrations relates to power output another test was preformed withhalf the resistive load, resulting in twice the load current. The inductive load was kept the samein both cases. Applied firing angles were also kept the same. When comparing the vibrations fromthe 6-pulse cases the amplitude have roughly doubled with the higher load current, while in the12-pulse case the vibrations only increased slightly.
0 5 10 15 20 25 30 35 40 45 50
Time [ms]
-5
-2.5
0
2.5
5
Vib
ration a
mplit
ude [m
/s2]
Measured vibrations and voltage during 6-pulse operation
-200
-100
0
100
200
Voltage [V
]
Raw signal
Filtered signal
Load voltage
0 5 10 15 20 25 30 35 40 45 50
Time [ms]
-5
-2.5
0
2.5
5
Vib
ration a
mplit
ude [m
/s2]
Measured vibrations and voltage during 12-pulse operation
-200
-100
0
100
200
Voltage [V
]
Raw signal
Filtered signal
Load voltage
Figure 26: Load voltages and vibrations in both 6- and 12-pulse mode during the second session.Note that the on-board PSU is in use this time around, which explains the irregularities seen inthe voltages.
When having increased current output, the vibrations caused while running 6-pulse becameaudible. This was also the case when operating at sub-nominal frequencies, requiring even lesscurrent output before being perceived.
0 200 400 600 800 1000 1200 1400 1600 1800 2000
Frequency [Hz]
0
0.5
1
1.5
2
2.5
Vib
ratio
n f
req
ue
ncy c
om
po
ne
nt
ma
gn
itu
de
[m
/s2]
6-Pulse
12-Pulse
Figure 27: FFT of the unfiltered vibration signals during the second session where a higher currentoutput was applied to the load. The dotted vertical lines are once again placed at 300 and 600 Hz.
23

The spectrum above clearly shows the previously stated increase in vibration magnitude, ofboth fundamental and harmonic content, during 6-pulse operation at higher current output. Withits first harmonic even exceeding the magnitude of the fundamental component during 12-pulserectification. Also seen is a decrease, or almost complete removal, of the interference previouslypresent at 50 Hz. While the component at 1600 Hz is still present although slightly smaller thanbefore.
In table 2 the magnitude of the fundamental frequency components is compared between 6-and 12-pulse rectifying during both sessions. Keep in mind that power output from the rotatingexciter was roughly doubled in the second session.
Pulse mode6-P 12-P Change
Session 1 1.16 0.34 -71%Session 2 2.31 0.43 -81%Change +99% +26%
Table 2: Comparative table showing the different fundamental frequency component magnitudesduring 6- and 12-pulse rectifying in both of the testing sessions. The magnitudes have beenextracted directly from previously presented the FFT data and are still in m/s2.
For comparison of vibrations at different firing angles further tests were performed during thefirst session but with lower firing angles. In fig.28 measurements of voltage and vibrations, whileapplying a 5 degree firing angle, are presented. It shows a clear decrease in vibration amplitudeduring both rectifying configurations compared to those observed in fig.24, where the fundamentalfrequency component magnitudes amount to 0.75 and 0.13 m/s2 for 6- and 12-pulse respectively.Thus it proves advantageous to operate the rectifier at very low firing angles in regards to torquepulsation and associated vibrations.
Time [ms]
0 5 10 15 20 25 30 35 40 45 50
Vib
ration a
mplit
ude [m
/s2]
-5
-2.5
0
2.5
5Measured vibrations and voltage during 6-pulse operation
Voltage [V
]
-200
-100
0
100
200
Raw signal
Filtered signal
Load voltage
Time [ms]
0 5 10 15 20 25 30 35 40 45 50
Vib
ration a
mplit
ude [m
/s2]
-5
-2.5
0
2.5
5Measured vibrations and voltage during 12-pulse operation
Voltage [V
]
-200
-100
0
100
200
Raw signal
Filtered signal
Load voltage
Figure 28: Output voltages and resulting torque vibrations during 6- and 12-pulse mode using a 5degree firing angle at nominal rate of rotation.
24

5 Discussion and conclusions
Overall the system functioned as intended and all our goals stated in the project description weremet. The firing boards where able to operate in parallel and independently of each other, effec-tively yielding 12-pulse rectifying from two 6-pulse systems. The bluetooth modules transmittedthe signals without any major interferences or loss in communication, although two packages wereobserved to be lost once during the rotating step response tests. The system was shown to be oper-ational at frequencies below nominal, where the power supply limits the lowest possible frequencyto 26 Hz. With the use of an auxiliary power supply this could be lowered even further down to13 Hz, before the firing boards lost PLL.
As for any system that is supposed to operate in an harsh environment, it is difficult to make agood estimation for how long the system would remain functional. In this project testing was doneon component survivability towards g-forces for about an hour. Where commercial applicability ofthis system would require it to run for a considerably longer time. Therefore there is an uncertaintyassociated with the system durability during a longer timespan even though it did not show anyunwanted behavior during the performed tests.
Heat transfer from the thyristors could become a problem when operating on higher currentsfor a longer time period. Especially considering that the thermal compound was displaced duringrotation, risking depletion of the thin layer in-between the thyristor and SE. This risk could bemitigated with the use of a thermal compound that cures and stays in place or thermal press pads.
No tests have been done connecting the system to a high level controller. If such a controllerrequires measured current and/or voltage on the rotating side as feedback, time delay imposed bythe bluetooth link might become an issue.
In regards to the measured vibrations caused by torque pulsation in the rotating exciter we canonly determine whether these increase or decrease during different scenarios. As the sensor is placedon the static side, which in itself is fixed to the surrounding structures, calculation/approximationof the actual torque variations using these measurements would be difficult. These measurementsdoes however support the claim that torque pulsation is lowered when operating in 12-pulse modecompared to 6-pulse.
Regarding the 1600Hz vibrations no certain source have been found, although it is possible thatit originates from the gearbox driving the rotor. Furthermore, the vibration component observedat 50Hz during some of the tests can probably be attributed to electrical interference as these wereonly present at seemingly random times.
25

6 Future work
In this section a few suggestions on further studies and improvements to the system is presented. Itis by no means an exhaustive list but covers some of what we considered to be the more importantparts throughout the course of this project.
• Further testing on the components resilience towards g-forces and possibly even higher g-forces as well to ensure that the system performs as intended for a longer period of time.
• The vibrations could be measured on the rotating side of the rotating exciter instead of onthe stationary side as done in this study. If the sensor were to be placed on the rotor, andtransmission of the data could be solved, one would be able to calculate the torque pulsationas the rotor is of known mass and rotates freely from the surrounding structure.
• Testing using a high level controller to ensure proper functionality even with the time delayimposed by the bluetooth transmission. If the time delay causes problems a new bluetoothdevice that have a lower latency and/or shorter rise-time could possibly solve this problem.
• The PSU restricts operation to electrical frequencies above 26 Hz which could be problematicduring startup of the generator. If this is the case, replacing the PSU for one that can operateat even lower frequencies should be considered.
26

References
[1] M. Wallin. Measurement and modelling of unbalanced magnetic pull in hydropower generators.2013. ISSN 1651-6214; 1029.
[2] S. J. Chapman. Electric Machinery Fundementals. 2011, 5th Edition, Chapter 4, pp. 191-270.
[3] J. K. Nøland, F. Evestedt, J.J. Pérez-Loya, J.Abrahamsson and U.Lundin. Comparison ofthyristor controlled rectification topologies for a six-phase rotating brushless permanent magnetexciter. IEEE Trans. on Energy Convers., Oct. 2015.
[4] J. K. Nøland. A New Paradigm for Large Brushless Hydrogenerators. Doc. thesis, Div. Elect.,Ångström Lab., Uppsala Univ., Uppsala, Sweden, 2017.
[5] T. R. Kuphaldt. Lessons in electric circuits. 2009, Vol. 3, 5th Edition, pp. 319-356.
[6] C. Bisdikian. An overview of the Bluetooth wireless technology. IEEE Communications Mag-azine, Vol. 39, Issue 12, Dec. 2001, pp. 86-94.
[7] Bluetooth SIG, Inc. Specification of the bluetooth system. Core Pack. Ver. 4.0,June 2010, pp. 17-23. Available at: https://www.bluetooth.com/specifications/bluetooth-core-specification/legacy-specifications. [Accessed 04 Jan 2018].
[8] Emetor AB. Torque ripple. Web page. Available at: http://www.emetor.org/glossary/torque-ripple/. [Accessed 27 Nov 2017].
[9] Phoenix Contact. ILB BT ADIO MUX. Data sheet, Apr. 2017. Available at: https://www.phoenixcontact.com/online/portal/us?uri=pxc-oc-itemdetail:pid=2884208.[Accessed 04 Jan 2018].
[10] J. Goodell, Oztek Corp. SCR Driver Board Firing Pulses. Blog post, Apr. 2011. Availableat: http://www.oztekcorp.com/blog/bid/47387/SCR-Driver-Board-Firing-Pulses.[Accessed 04 Jan 2018].
[11] Oztek Corp. Oztek Power Studio User’s Manual UM-0052. Rev. D, September 2016. Availableat: http://cdn2.hubspot.net/hubfs/23453/2016_Brochures_Product_Sheets/UM-0052_Oztek_Power_Studio.pdf. [Accessed 04 Jan 2018].
[12] Phoenix Contact. PSU QUINT4-PS/1AC/24DC/5. Datasheet, Aug. 2016. Availabelat: https://www.phoenixcontact.com/online/portal/pi?uri=pxc-oc-itemdetail:pid=2904600&library=pien&tab=1. [Accessed 28 Jan 2018].
[13] Analog Devices. PSU QUINT4-PS/1AC/24DC/5. Datasheet, Rev. E, 2014. Avail-abel at: http://www.analog.com/media/en/technical-documentation/data-sheets/ADXL103_203.pdf. [Accessed 04 Jan 2018].
[14] Analog Devices. ADXL203EB Dual Axis Accelerometer Evaluation Board. Rev. 0,2004. Available at: http://www.analog.com/media/cn/technical-documentation/evaluation-documentation/535395787ADXL203EB_0.pdf. [Accessed 04 Jan 2018].
[15] L. Lawhead, R. Hamilton, J. Horak. Three Phase Transformer Winding Configurations andDifferential Relay Compensation. Basler Electric Company, 60th Georgian Tech Prot. RelayCon., May 2006, pp. 15.
27

Appendix
Figure 29: Electrical diagram of wiring and components present on the rotating side.
28