-
8/3/2019 Chapter3 Overall
1/45
Mechanics of Machines
BDA2033Lecture #05
University Tun Hussein Onn Malaysia (UTHM),
Faculty of Mechanical and Manufacturing,
Department of Mechanics
-
8/3/2019 Chapter3 Overall
2/45
2
Todays Objectives:
Students will be able to:
1. explain static and dynamic unbalance
2. solve problems relate to the static and dynamic balancing
of
rotating machinery
Learning topics:
Introduction
Application
Balancing of rigid
rotor
CHAPTERS : BALANCING
-
8/3/2019 Chapter3 Overall
3/45
-
8/3/2019 Chapter3 Overall
4/45
4
APPLICATION
A tire balancer machine
Wheel-balancing machines are use
to provide accurate balance. There
are two general designs : one type
spins the wheel it is off the vehicle
and the other spins the wheel while
one the vehicle. They both use the
vibrations that occur when the
wheel is rotating to locate any
unbalance in the wheel and tyre.
They check both static and dynamic
balance.
-
8/3/2019 Chapter3 Overall
5/45
5
APPLICATION (Cont.d)
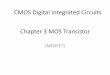
There are 2 types of balance (and unbalance) for tire :
static and dynamic.
centrifugal force acting on a
balanced and unbalanced wheeleffect of static and dynamic
unbalance on a wheel
= mr2
-
8/3/2019 Chapter3 Overall
6/45
6
APPLICATION (Cont.d)
A wheel and tire in static balance, free to rotate on their
axle, will remain in anyposition to which it is turned.
If out of balance, the heavy spot which causes the unbalance
will rotate the wheel
until it is at the bottom.
This static unbalance can be balanced by fitting weights to the
wheel rim directly
opposite the heavy spot.
Static unbalance
0CF (Shaking force)
-
8/3/2019 Chapter3 Overall
7/45
-
8/3/2019 Chapter3 Overall
8/45
8
BALANCING OF RIGID ROTORS
F = mr2
= r
=
(a) A mass that is moving in a circular path undergoes angular
acceleration, and
there is a dynamic force, referred to as centrifugal force,
associated with the
acceleration. The centrifugal force is exerted by the mass on
the rod, and is
transmitted to the bearing.
(b) The shaft is subject to centrifugal force because the center
of mass of the
rotor does not lie on the shaft centerline
Introduction
-
8/3/2019 Chapter3 Overall
9/45
9
BALANCING OF RIGID ROTORS (Cont.d)
Static unbalance
Static unbalance caused by an eccentric mass on a rotating
shaft
0CF
-
8/3/2019 Chapter3 Overall
10/45
10
BALANCING OF RIGID ROTORS (Cont.d)
Dynamic unbalance
Dynamic unbalance due to eccentric masses at multiple axial
location on a
rotating shaft
0
0
C
C
M
F
-
8/3/2019 Chapter3 Overall
11/45
11
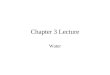
Static balancing
Figure 2
(a) a static unbalance can be
eliminated by the addition of a single
counterweight mc at the proper radial
distance rc and angle c.(b) graphical determination of the
counterweight size and location
Figure beside shows a rigid rotor
setup. The rotor is assumed to be
rotating with constant angular
velocity .
BALANCING OF RIGID ROTORS (Cont.d)
-
8/3/2019 Chapter3 Overall
12/45
12
0332211 CCrmrmrmrm
233
222
211 rmrmrmFtotal
022332
222
11 ccrmrmrmrmF
0coscoscoscos 333222111 CCCrmrmrmrm
0sinsinsinsin 333222111 CCCrmrmrmrm
Sum of a centrifugal force produces by the original masses :
To balance the rotor, sum of the vector forces must be zero
:
The quantity of can be factored out :
The equation above can be solved mathematically by dividing it
into y dan z
component :
BALANCING OF RIGID ROTORS (Cont.d)
-
8/3/2019 Chapter3 Overall
13/45
13
21
2333222111
2333222111
sinsin
coscoscos
rmainrmrm
rmrmrmrmCC
333222111
333222111
coscoscos
sinsinsinarctan
rmrmrm
rmrmrm
C
Solving for mCrC and C we have :
BALANCING OF RIGID ROTORS (Cont.d)
-
8/3/2019 Chapter3 Overall
14/45
14
EXAMPLE 1 (Static Balancing of a Rotor)
The rotor of the figure shown rotates with a speed of 40 rpm has
the following
properties :
700.123m2
00.195m1
angle()r (m)m (kg)mass
Determine the amount and location of the
counterweight required for static balance.
Then calculate the centrifugal force generate by the
counterweight.
Answer :
mcr
c= 11.25 kgm
c = 197.48
Fc = 19.7 N
70m1
m2r2
r1
-
8/3/2019 Chapter3 Overall
15/45
15
EXAMPLE 2 (Static Balancing of a Rotor)
The rotor of the figure shown has the following properties :
20035010m3
15030023m2
6025034m1
angle()r (mm)m (kg)mass
Determine the amount and location of the
counterweight required for static balance.
Answer :
mcr
c=9.3 kg.mm
c = 226
M4 15 170
-
8/3/2019 Chapter3 Overall
16/45
16
EXERCISE 1 (Static Balancing of a Rotor)
The rotor of the figure shown has the following properties :
602m3
802m2
803m1
r (mm)m (kg)mass
Determine the amount and location of the
counterweight required for static balance.
Answer :
mcr
c= 227.8 kgmm
c = 297.0
1= 60
2= 150
3= 225
-
8/3/2019 Chapter3 Overall
17/45
17
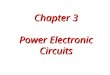
Dynamic balancing
Figure 3(a) In general, dynamic balancing
requires the use of two counter-
weights. Shown are counter-
balances placed in arbitrarily
selected planes at axial position
P and Q.(b) Graphical determination of
counterweight 2.
(c) Graphical determination of
counterweight 1.
Figure beside shows a rigid rotor
setup. The rotor is assumed to be
rotating with constant angular
velocity .
BALANCING OF RIGID ROTORS (Cont.d)
-
8/3/2019 Chapter3 Overall
18/45
18
For static balance, the sum of all the centrifugal forces must
be zero :
02211332211 cccc rmrmrmrmrm
0
2
22
2
11
2
33
2
22
2
11
ccccrmrmrmrmrmF
The quantity of can be factored out :
Additional condition for dynamic balance is that the sum of the
moments of the
centrifugal forces about any arbitrary point on the rotor must
be zero :
Here we will take moments about point P.
022
2232
3322
2212
11 ccc srmsrmsrmsrm
The quantity of can be factored out :
0222333222111 ccc srmsrmsrmsrm
0coscoscoscos 2222333322221111 cccc srmsrmsrmsrm
0sinsinsinsin 2222333322221111 cccc srmsrmsrmsrm
The equation above can be solved mathematically by dividing it
into y dan z
component :
BALANCING OF RIGID ROTORS (Cont.d)
-
8/3/2019 Chapter3 Overall
19/45
19
21
2222333222111
2222333222111
11sinsinsin
coscoscoscos
ccc
ccc
cc
rmrmainrmrm
rmrmrmrmrm
222333222111
2223332221111
coscoscoscos
sinsinsinsinarctan
ccc
ccc
crmrmrmrm
rmrmrmrm
Solving for mC2rC2 and C2 we have :
21
2333322221111
2333322221111
222
sinsinsin
coscoscos1
rsmrsmrsm
rsmrsmrsm
srm
c
cc
333322221111
3333222211112
coscoscos
sinsinsinarctan
rsmrsmrsm
rsmrsmrsm
c
Next solving for mC1rC1 and C1 we have :
BALANCING OF RIGID ROTORS (Cont.d)
-
8/3/2019 Chapter3 Overall
20/45
20
Example 2EXAMPLE 1( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
21/45
21
EXAMPLE ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
22/45
22
EXAMPLE ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
23/45
23
EXAMPLE ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
24/45
24
EXAMPLE ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
25/45
25
EXAMPLE 2 ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
26/45
26
EXAMPLE 2( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
27/45
27
EXAMPLE 2( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
28/45
28
EXAMPLE 2( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
29/45
29
EXAMPLE 3 ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
30/45
30
EXAMPLE 3( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
31/45
31
EXAMPLE 3( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
32/45
32
EXAMPLE 3 ( Dynamic Balancing of a Rotor)
-
8/3/2019 Chapter3 Overall
33/45
33
IN CLASS TUTORIAL (Dynamic Balancing of a Rotor)
170602m3
300902m2
60803m1
angle()r (mm)m (kg)mass
The rotor of the figure shown has the following properties :
Determine the amount and location of the counterweight in plane
A and B required
for complete balance.
Answer :
The total axial length is 1000 mm between
bearings. Counterweight are to be placed
in planes that are 100 mm from each bearing.
The axial distances are then
l1 = 200 mm, l2 = 500 mm, l3 = 700 mm,
and lR = 800 mm
mRrR = 32.2 kgmm
R = 57.7
mLrL = 147.9 kgmm
L = 222.5
-
8/3/2019 Chapter3 Overall
34/45
34
BALANCING OF RECIPROCATING MASSESBALANCING OF RECIPROCATING
MASSES
Internal
engine
-
8/3/2019 Chapter3 Overall
35/45
35
-
8/3/2019 Chapter3 Overall
36/45
36
BALANCING OF RECIPROCATING MASSESBALANCING OF RECIPROCATING
MASSES
-
8/3/2019 Chapter3 Overall
37/45
37
PARTIAL BALANCING OF PRIMARY INERTIA FORCEPARTIAL BALANCING OF
PRIMARY INERTIA FORCE
-
8/3/2019 Chapter3 Overall
38/45
38
PARTIAL BALANCING OF PRIMARY INERTIA FORCEPARTIAL BALANCING OF
PRIMARY INERTIA FORCE
-
8/3/2019 Chapter3 Overall
39/45
39
BALANCING OF MULTIPLE CYLINDER ENGINEBALANCING OF MULTIPLE
CYLINDER ENGINE INLINE ENGINEINLINE ENGINE
-
8/3/2019 Chapter3 Overall
40/45
40
-
8/3/2019 Chapter3 Overall
41/45
41
-
8/3/2019 Chapter3 Overall
42/45
-
8/3/2019 Chapter3 Overall
43/45
43
-
8/3/2019 Chapter3 Overall
44/45
44
B.Balancing for secondary inertia forceon your own
-
8/3/2019 Chapter3 Overall
45/45
45