Embed Size (px)
Citation preview
3rd. Asia Automobile Institute Summit 2-4 December 2014, Bangkok
1
Autonomous Driving Intelligence for Future Innovation
Masao Nagai President
Japan Automobile Research Institute

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 2
Contents
1. Motivation and objectives
2. S-Innovation project outline
3. ADAS: Adaptive Driver Assistance System
4. Conclusions Furthermore ... SIP: Strategic Innovation Promotion program for ADS (Automated Driving Systems)
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 3
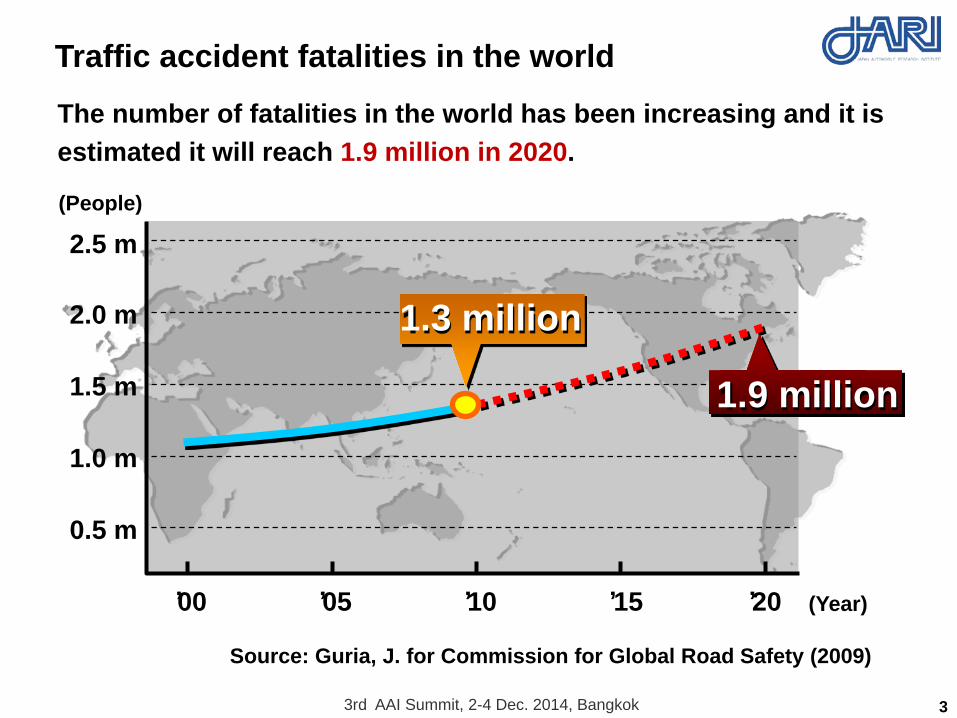
Traffic accident fatalities in the world The number of fatalities in the world has been increasing and it is estimated it will reach 1.9 million in 2020.
2.5 m
2.0 m
1.5 m
1.0 m
0.5 m
20
(People)
(Year) 00 ’ 05 ’ 15 ’ ’ 10 ’
1.3 million
1.9 million
Source: Guria, J. for Commission for Global Road Safety (2009)

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 4
Annual transition of traffic accidents in Japan The number of accidents, fatalities and injuries has been decreasing in recent years.
Source: National Police Agency
0
20
40
60
80
100
120
140
160
180
0
2,000
4,000
6,000
8,000
10,000
12,000
14,000
16,000
18,000
S41 43 45 47 49 51 53 55 57 59 61 63 H2 4 6 8 10 12 14 16 18 20 22 24
事故件数(万件)
死者数(人)
負傷者数(万人)
1970 Injuries: 981,096
1970 Fatalities: 16,765
2013 Injuries: 781,494
2013 Fatalities: 4,373
Accidents, Right scale Fatalities, Left scale
Injuries, Right scale
1970 1980 1990 2000 2010
People Ten thousand Cases/ People

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 5
Accidents in Japan: age-specific analysis
The number of accidents involving aged people is stable, while that involving younger people has decreased.
Source: ITARDA Information No. 81
Rat
io o
f fat
aliti
es, 1
998:
1.0
1.4
0.0 0.2 0.4 0.6
0.8 1.0 1.2
Year 98 01 99 02 03 05 07 06 08 09 04
24 years and younger
25 - 64 years old
65 years and older
Age
Rat
io o
f driv
er
mos
tly a
t fau
lt* (%
)
40
50
60
70
80
90
This ratio increases rapidly in line with aging. * = (No. of driver mostly at fault/ No. of driver mostly at fault + other driver) x 100

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 6
S-Innovation project supported by JST* "Autonomous Driving Intelligence to enhance a safe and secured traffic society for elderly drivers" was started in 2010 and will continue until 2019 with the following 3 stages: Stage 1: Development of autonomous driving intelligence systems Stage 2: System improvement and assessment by field operational
tests Stage 3: Standardization and commercialization
*: Japan Science and Technology Agency
Project Manager: Research Leader: Project Partners:
Mr. Hideo Inoue, Toyota Motor Corporation Prof. Masao Nagai, JARI Toyota Motor Corporation Toyota Central R&D Labs, Inc. The University of Tokyo Tokyo University of Agriculture and Technology

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 7
S-Innovation project: 3 stages' overview
Stage 3, 2017-2019
Collision avoidance path generation
Hazard anticipation, Risk potential estimation
algorithm
Laser scanner and camera(Hardware development)
and enhancing classification
Classification of environmental objects and motion prediction
2. Environmental perception
3. Driver Model
1. Sensing Technology
Wide range and rich detail
Situational Risk Assessment
Contour of collision risk
4. Collision AvoidanceAlgorithm
Rear-end collision avoidance
Pedestrian/bicycle protection
Lane departure prevention
Head-on collisions
Functionalities of Low-speed autonomous collision
avoidance (up to 30 km/h)
Emerging Intelligent mobility technologyand commercializing for protect aged drivers
Emerging Intelligent mobility technologyand commercializing for protect aged drivers
Field Operational Tests (FOT)
• Acceptance study• Effectiveness estimation
Frontier research for enhancing intelligence
福井県大野市
愛知県豊田市
山梨県河口湖町
千葉県柏市
D rive reco rd erLog g in g d a ta a n a lysis
D riv e reco rd erLog g in g d a ta a n a lysis
Driving simulator exp.
Urban test sites
Global Standard Development
Collision avoidance path generation
Hazard anticipation, Risk potential estimation
algorithm
Laser scanner and camera(Hardware development)
and enhancing classification
Classification of environmental objects and motion prediction
2. Environmental perception
3. Driver Model
1. Sensing Technology
Wide range and rich detail
Situational Risk Assessment
Contour of collision risk
4. Collision AvoidanceAlgorithm
Rear-end collision avoidance
Pedestrian/bicycle protection
Lane departure prevention
Head-on collisions
Functionalities of Low-speed autonomous collision
avoidance (up to 30 km/h)
Emerging Intelligent mobility technologyand commercializing for protect aged drivers
Emerging Intelligent mobility technologyand commercializing for protect aged drivers
Field Operational Tests (FOT)
• Acceptance study• Effectiveness estimation
Frontier research for enhancing intelligence
福井県大野市
愛知県豊田市
山梨県河口湖町
千葉県柏市
D rive reco rd erLog g in g d a ta a n a lysis
D riv e reco rd erLog g in g d a ta a n a lysis
Driving simulator exp.
Urban test sites
Global Standard Development
Stage 1, 2010-2013
Stage 2, 2014-2016
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 8
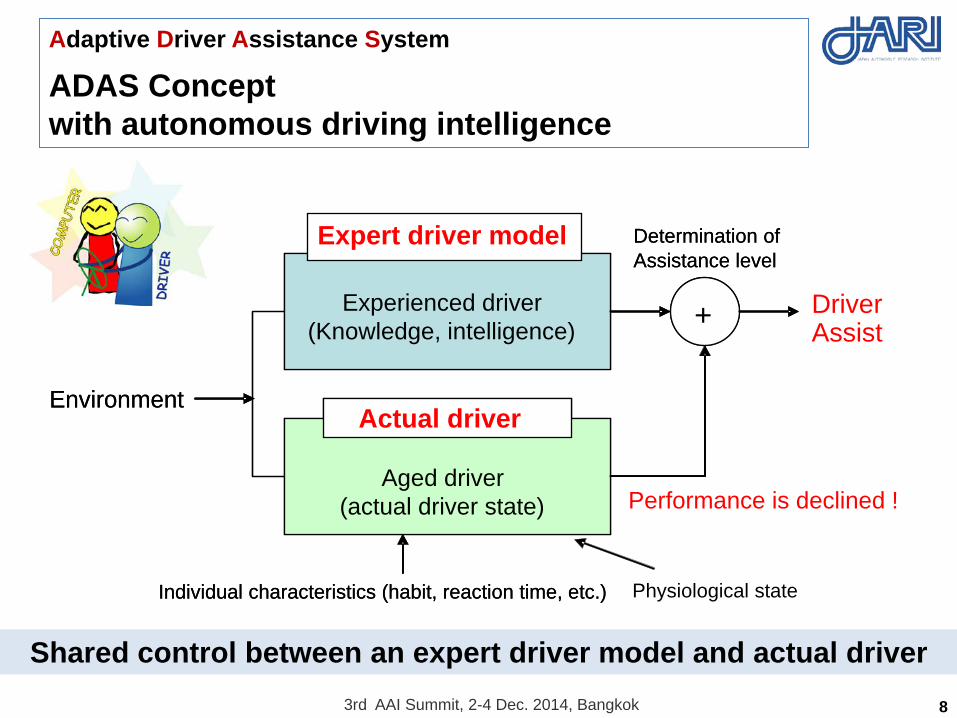
Adaptive Driver Assistance System
ADAS Concept with autonomous driving intelligence
Shared control between an expert driver model and actual driver
Aged driver (actual driver state)
Driver model 2
Driver model 1
Experienced driver (Knowledge, intelligence)
Environment
+
Determination of Assistance level
Driver Assist
Individual characteristics (habit, reaction time, etc.)
Aged driver (actual driver state)
Experienced driver (Knowledge, intelligence)
Environment
+
Determination of Assistance level
Individual characteristics (habit, reaction time, etc.) Physiological state
Expert driver model
Actual driver
Performance is declined !

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 9
ADAS: Adaptive Driver Assistance System is proposed to prevent traffic accidents caused by a decline in elderly drivers' performance.
ADAS's realizes "Driver-in-the-loop Autonomous Driving" which means shared driving between an expert driver model and actual driver.
How to model an expert driver's anticipatory information gathering is one of the most important points to design ADAS.
Aged driver(actual driver state)
Driver model 2
Driver model 1
Experienced driver(Knowledge, intelligence)
Environment
+
Determination of Assistance level
DriverAssist
Individual characteristics (habit, reaction time, etc.) Physiological state
Driving Intelligence
Aged driver(actual driver state)
Driver model 2
Driver model 1
Experienced driver(Knowledge, intelligence)
Environment
+
Determination of Assistance level
DriverAssist
Individual characteristics (habit, reaction time, etc.) Physiological state
Driving Intelligence
Adaptive Driver Assistance System
ADAS Concept with autonomous driving intelligence
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 10
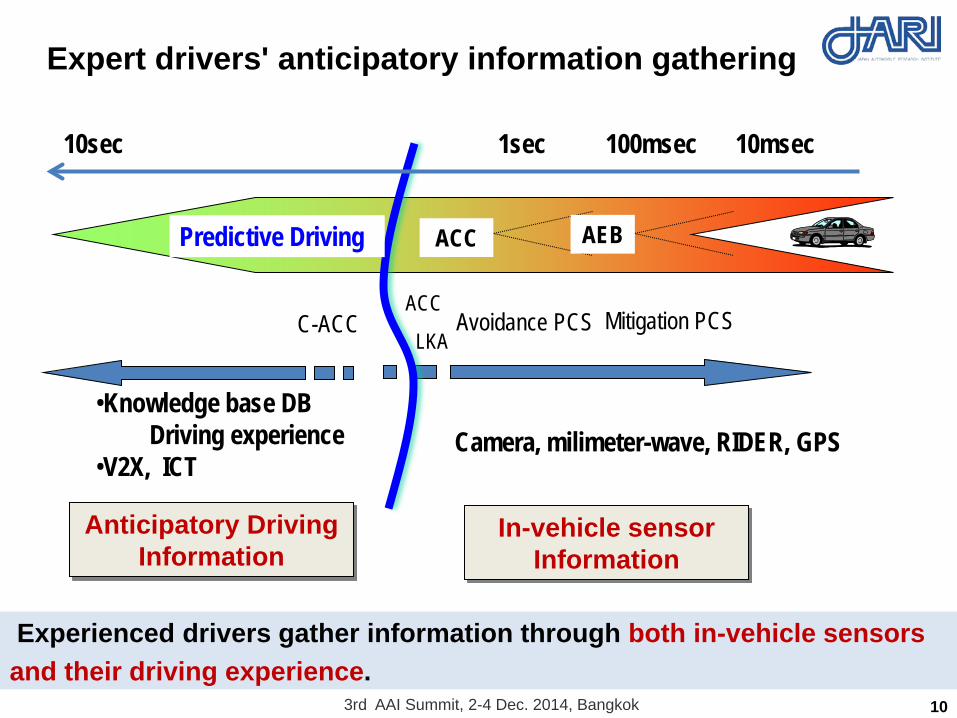
Expert drivers' anticipatory information gathering
Experienced drivers gather information through both in-vehicle sensors and their driving experience.
Anticipatory Driving Information
1sec 100msec 10msec
10sec
Mitigation PCS Avoidance PCS
Camera, milimeter-wave, RIDER, GPS
ACC
LKA C-ACC
•Knowledge base DB Driving experience •V2X, ICT
AEB ACC Predictive Driving
In-vehicle sensor Information

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 11
Performance limitation of AEB Current AEB: Autonomous Emergency Braking system is activated after detection of pedestrians with in-vehicle sensors, then braking is not enough to avoid a crash in some situations.
TOYOTA
re-Crash Safety
SUBARU
Eyesight ver.2.0
VOLVO
HUMAN SAFETY
Daimler
6D-Vision
Current AEB
0
2
2minmax
Vxa
=
Collision unavoidable
Collision avoidable
Dis
tanc
e to
ped
estr
ian
Vehicle speed

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 12
Autonomous Emergency Braking without hazard anticipation
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 13
Autonomous Emergency Braking with hazard anticipation

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 14
Collision avoidance performance evaluation* *: with a driving simulator in 'Tokyo University of Agriculture and Technology'
●: xped = 15m,●: xped = 13m, ●: xped = 11m,●: xped = 9m, ●: xped = 7m
Varying the timing of pedestrian appearance:
● :Predictive Braking Assistance (PBA) ▲ :Automatic Emergency Braking(AEB)
0 10 20 30 40 500
5
10
15
20
Velocity [km/h]
Lon
gitu
dina
l dis
tanc
e to
Ped
estr
ian
[m]
(amax=2.5 m/s2) (amax=7 m/s2)
Initial velocity 50km/h
Collision can be avoided at average deceleration under 2.5m/s2
Collision Unavoidable
2
2minmax
Vxa
=
Theoretical braking distance:
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 15
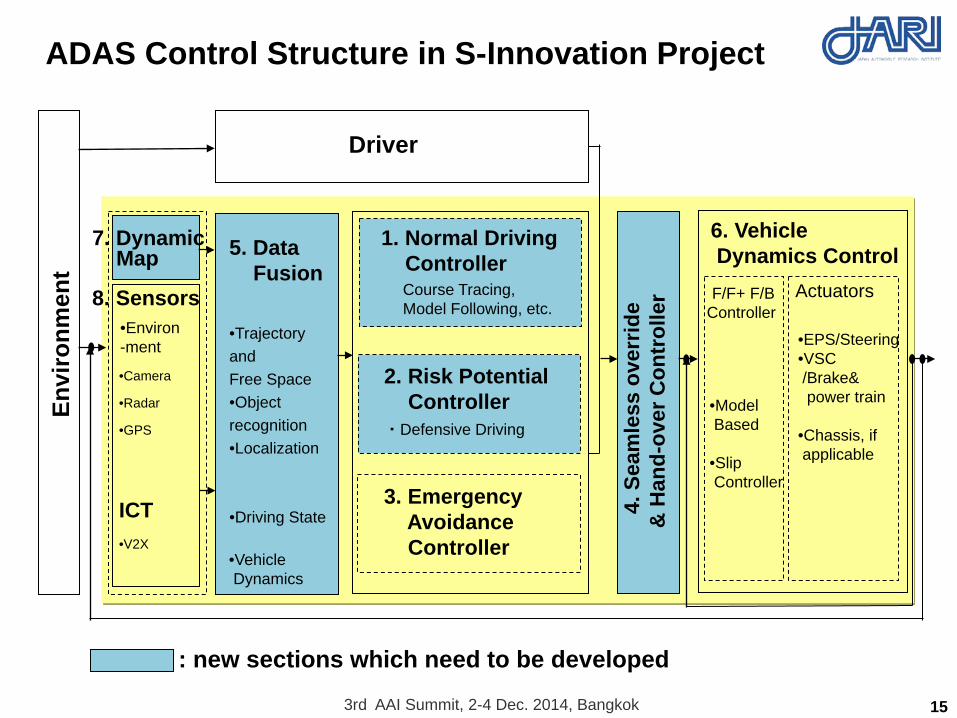
ADAS Control Structure in S-Innovation Project
•Environ -ment
Course Tracing, Model Following, etc.
1. Normal Driving Controller
2. Risk Potential Controller ・Defensive Driving
3. Emergency Avoidance Controller
4. S
eam
less
ove
rrid
e
& H
and-
over
Con
trol
ler
Actuators
5. Data Fusion
•Trajectory and Free Space •Object recognition •Localization •Driving State
•EPS/Steering •VSC /Brake& power train •Chassis, if applicable
6. Vehicle Dynamics Control
Driver
F/F+ F/B Controller
•Model Based •Slip Controller
Envi
ronm
ent
•Camera
•Radar
•GPS
ICT •V2X
•Vehicle Dynamics
8. Sensors
7. Dynamic Map
: new sections which need to be developed
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 16
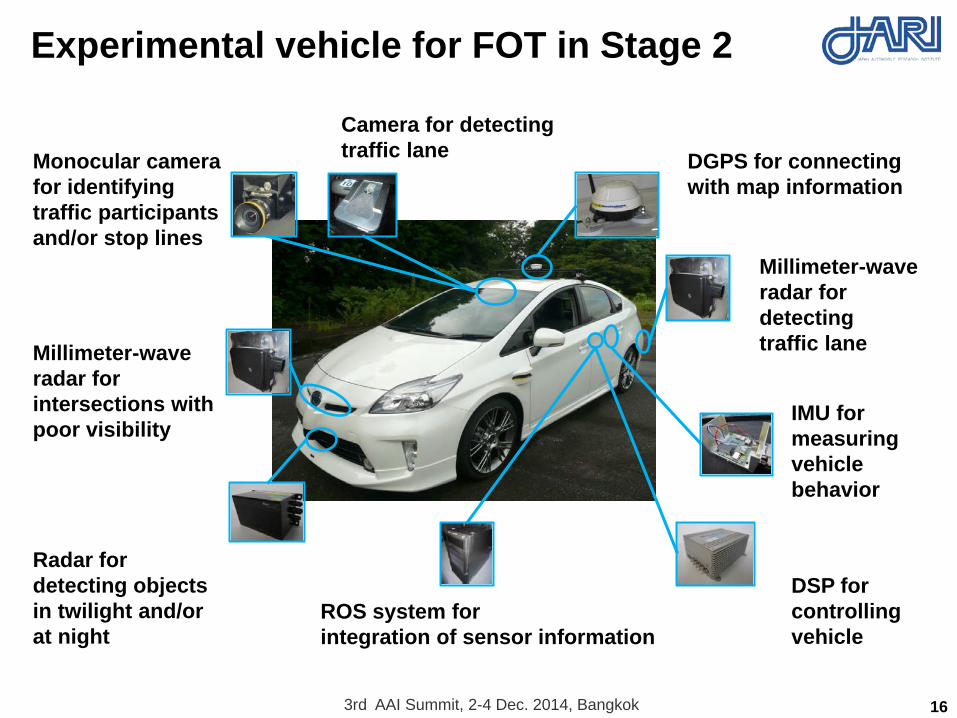
Experimental vehicle for FOT in Stage 2
Millimeter-wave radar for intersections with poor visibility
Radar for detecting objects in twilight and/or at night
ROS system for integration of sensor information
DSP for controlling vehicle
IMU for measuring vehicle behavior
Millimeter-wave radar for detecting traffic lane
DGPS for connecting with map information
Camera for detecting traffic lane Monocular camera
for identifying traffic participants and/or stop lines
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 17
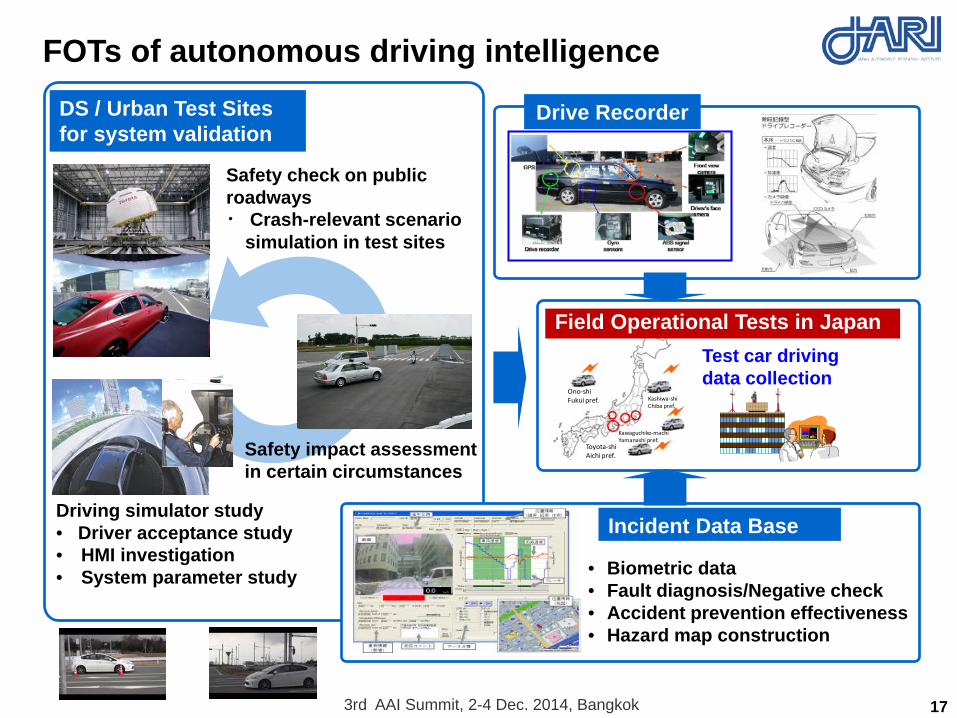
FOTs of autonomous driving intelligence
Driving simulator study • Driver acceptance study • HMI investigation • System parameter study
Safety impact assessment in certain circumstances
• Biometric data • Fault diagnosis/Negative check • Accident prevention effectiveness • Hazard map construction
DS / Urban Test Sites for system validation
Test car driving data collection
Incident Data Base
Safety check on public roadways ・ Crash-relevant scenario
simulation in test sites
Drive Recorder
Ono-shiFukui pref.
Toyota-shiAichi pref.
Kawaguchiko-machiYamanashi pref.
Kashiwa-shiChiba pref.
Field Operational Tests in Japan

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 18
Conclusions: ADAS with Autonomous Driving Intelligence has been studied to enhance safe and secured driving especially for elderly drivers in the aging society.
Proposed control structure is based on an expert driver model, consisting of normal driving, risk-predictive anticipatory driving, and emergency driving.
Prototype test vehicles are evaluated by DS (Driving Simulator) and urban test sites to avoid pedestrian collisions. Outlook:
FOT will be conducted on public roads to collect naturalistic driving behaviors, and environmental data to improve ADAS and HMI, by incident analysis.

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 19
Contents
Furthermore... SIP: Strategic Innovation Promotion program for ADS (Automated Driving Systems)
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 20
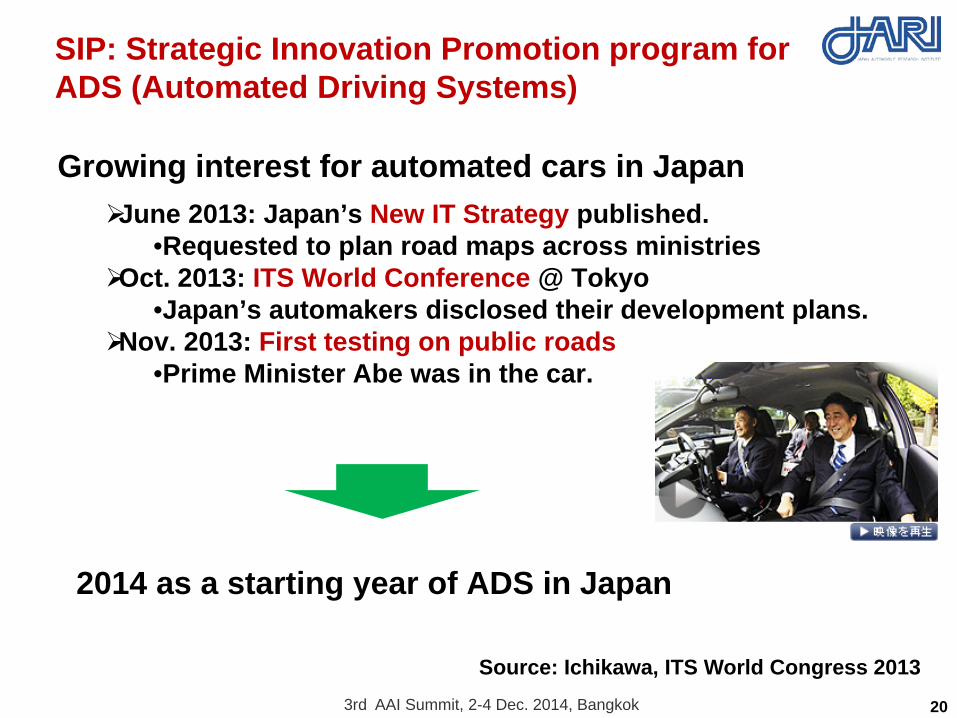
SIP: Strategic Innovation Promotion program for ADS (Automated Driving Systems)
Source: Ichikawa, ITS World Congress 2013
Growing interest for automated cars in Japan
June 2013: Japan’s New IT Strategy published. •Requested to plan road maps across ministries
Oct. 2013: ITS World Conference @ Tokyo •Japan’s automakers disclosed their development plans.
Nov. 2013: First testing on public roads •Prime Minister Abe was in the car.
2014 as a starting year of ADS in Japan

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 21
ADS: Automated Driving System nominated in SIP
A new cross-ministry Strategic Innovation Promotion (SIP) program in JFY2014 was launched by the Japanese government.
10 candidate technology fields including "Automated driving system" for accident reduction, mobility and environment improvement, were selected.
Total SIP budget in JFY 2014 is 50 billion Japanese yen (500 million US dollars), and 2.5 billion yen (25 mil. US dollars) for automated driving system.

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 22
Definition of automation level in SIP : commercial viability : plan
Full-automated driving system Level 4
Acceleration, steering and braking are conducted except by a driver. A driver has no involvement.
Highly automated driving system
Level 3 Acceleration, steering and braking are conducted by a vehicle. A driver corresponds during an emergency only.
Level 2 Acceleration, steering and braking are operated by a vehicle simultaneously.
Safe driving support system Independent control
Level 1 AEB, LDW ACC, LKS
No driving supports Warning only
Level 0 Warning
2017-
Late 2020's
Early 2020's Airplane
Shinkansen

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 23
Development & verification of ADS technologies “Dynamic Maps (Mapping Data Infrastructure)”, prediction based on IT (cooperative technologies), sensing technologies, drivers’ model (human factors), system securities
Basic technologies National DB of traffic accidents, data analysis and simulations technologies, visualization of CO2 emissions
International cooperation Open research facilities, social acceptance, package type ITS infrastructures export strategy
Next generation urban transport Enhanced local traffic management, next generation transport system (through Tokyo Olympics/Paralympics)
SIP for ADS, R&D items
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 24
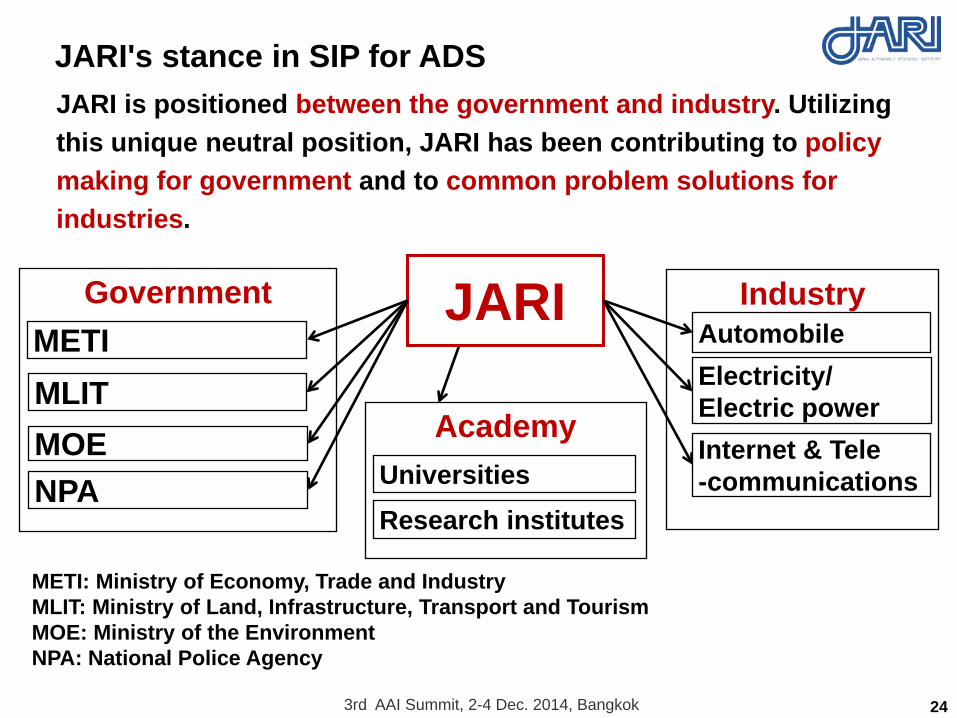
JARI's stance in SIP for ADS
Academy
Industry Government METI
MOE NPA
MLIT Electricity/ Electric power
Automobile JARI
Internet & Tele -communications Universities
Research institutes
METI: Ministry of Economy, Trade and Industry MLIT: Ministry of Land, Infrastructure, Transport and Tourism MOE: Ministry of the Environment NPA: National Police Agency
JARI is positioned between the government and industry. Utilizing this unique neutral position, JARI has been contributing to policy making for government and to common problem solutions for industries.

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 25
Remaining issues
Over the past decade, many automated driving systems
have been researched and developed. Manufacturers
are increasingly focusing on ADAS and Automated
Driving Systems in new model cars.
However, there are still many technical and non-
technical issues, such as legal and public acceptance,
etc. to overcome so that harmonization between each
sectors and regions are needed.

3rd AAI Summit, 2-4 Dec. 2014, Bangkok 26
Thank you for your attention.
Masao Nagai Email: [email protected]
Tel: +81-3-5733-7921
3rd AAI Summit, 2-4 Dec. 2014, Bangkok 27
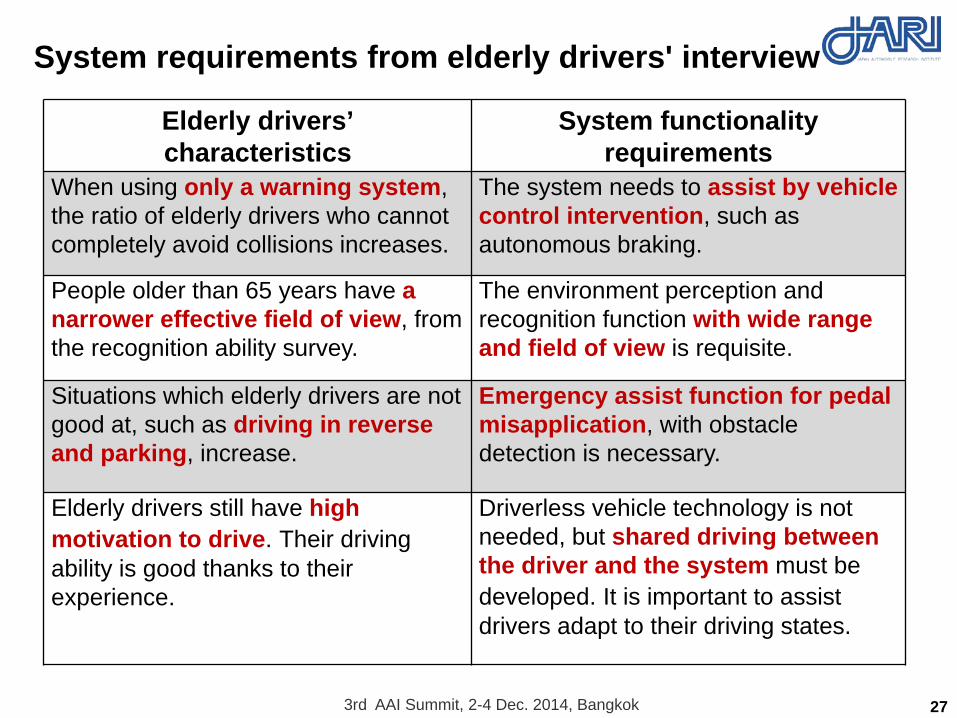
System requirements from elderly drivers' interview
Elderly drivers’ characteristics
System functionality requirements
When using only a warning system, the ratio of elderly drivers who cannot completely avoid collisions increases.
The system needs to assist by vehicle control intervention, such as autonomous braking.
People older than 65 years have a narrower effective field of view, from the recognition ability survey.
The environment perception and recognition function with wide range and field of view is requisite.
Situations which elderly drivers are not good at, such as driving in reverse and parking, increase.
Emergency assist function for pedal misapplication, with obstacle detection is necessary.
Elderly drivers still have high motivation to drive. Their driving ability is good thanks to their experience.
Driverless vehicle technology is not needed, but shared driving between the driver and the system must be developed. It is important to assist drivers adapt to their driving states.