Embed Size (px)
Citation preview

BMW at AD meetup Munich19.09.2019
ENABLING DATA DRIVEN DEVELOPMENT OF AUTONOMOUS DRIVING AT BMW
Miha Pelko@mpelko

AGENDA
o Why Autonomous Driving Development (ADD) requires lots of data?
o How can the data platform support ADD?
o Deep dives: Validation of AD software
Page 2

Page 3
AUTONOMOUS DRIVING LEVELS
NO SUPPORT
HANDS ON
ASSISTENCE PARTLY AUTOMATED AUTONOMOUSHIGHLY AUTOMATED FULLY AUTOMATED
Vehicle controls forward and sideward motion
Vehicle controls forward motion
Driver has full controlDriver controls steering and
checks forward motion
Driver checks forward and sideward motion
Driver is ready to take control at any time
Driver only required for certain parts of the track
AUFGABEDES FAHRERS
AUFGABE DES FAHRZEUGS
0 1 2 3 4 5
G11 / G30 iNEXT iNEXT Pilotserie tbd.
HANDS ON HANDS TEMP. OFFEYES TEMP. OFF
HANDS OFFEYES OFF
HANDS OFF MIND OFF
PASSENGER
TRANSITION OF REPONSIBILITYHUMAN MACHINE
TECHNO-LOGICAL‘MOONSHOT’
TECHNO-LOGICALQUANTUM LEAP
Vehicle requests driver to take over control based on
situations
Vehicle does not request driver to take over control
No driver required
*Source: SAE (Society of Automotive Engineers) International Level of Automation

HUMANS DO LEARNING WITH BIG DATA
Page 4Koch et al. 2005, Current Biology 16, 1428–1434
Estimated ~1MB/s of information transfer over optic nerve
Over 18 years awake time the brain would have processed ~0.75 PB of visual information stream.

Full Range Radar.
ADAS* SYSTEM SETUP(* AUTONOMOUS DRIVING ASSISTANCE SYSTEMS)
NIGHT VISION.Side View Camera.
Side RangeRadar.
Surround View Camera.
Ultra-sonic.
Stereo Front Camera.
Rear View Camera.
Side Range Radar.
Ultra-sonic.
STEERING AND LANE CONTROL ASSISTANT INCL. LANE CHANGE ASSISTANT.
SURROUND VIEW.ACTIVE CRUISE CONTROL.
SPEED LIMIT ASSIST.
EMERGENCY STEERING ASSIST.
WRONG WAY ASSIST.
CROSSROAD ASSIST.
23 SENSORSBMW SERIES 5

DATA COLLECTION FLEET
SEVERAL TB PER HOUR

DEVELOPMENT AND VALIDATION PROCESS
Page 7
Several TB/hUp to 500 PB/a
ML Training / AD development
Test drives
Data Ingest to Data Center
OrganizeStructureEvaluate
Deployment of trained algorithms
Target data sets
Deployment of trained
algorithms
Software in a loop, Simulation
Combinatorial boost of scenarios
Synthetic data
Scenario extraction
Ground Truth creation
Automatic generationReference sensors
Manual labeling

ENABLING DEVELOPERS
Page 8
I want to develop a function of driving on a roundabout with pedestrians, …
Search for existing relevant scenarios Run the new algorithms on
the data Order the drive to collect relevant scenarios
Export part of the data for labeling and/or local development Train the ML models
Calculate KPIs for the new versions of algorithms

YIN AND YANG OF BIG DATA ASSISTED AD DEVELOPMENT
Page 9

BMW GROUP HIGH PERFORMANCE D3 PLATFORM.
MUNICH AREA
On-Premise Managed Infrastructure
Backbone Network
Containerized Computing PlatformGateway
Zone
BMW Group AD Campus
Self Service container orchestration Expert Service Desk
Ingest
HiL Stations
Function Reprocessing (SIL)Simulation
Model Training
Data PlatformBMW Group AD
Campus
Applications Development
Teams
3rd Party Gateway
Multi-tenancy interfacesBMW Group developer, repositories
Copy Station
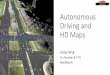
GLOBAL DATA LOGISTICS
Remote Locations
DCData preparation
SearchTest space analysis

Seite 11
VALIDATION OF AD SOFTWARE – OPEN LOOP
• Manual labeling+ Precision - Small scope
• Reference sensors+ Fully independent setup- Limited scope
• Automatic generation (alternative offline algorithms)+ Large scope- Correlation with the sensors

Seite 12
EXTRACTING THE SCENARIOS FROM THE DATA
Vehicle Speed
Number of pedestrians
Observed Scenario

Seite 13
EXTENDING THE SCENARIO SPACE WITH SIMULATED DATA
Vehicle Speed
Number of pedestrians
Observed Scenario
Simulated Scenario

EXCITING TIMES AHEAD – THANK YOU FOR YOUR INTEREST.