-
8/11/2019 Application of Classical Control
1/52
Control Guidance & Simulation Entity
Classical Control Theory:
- Application to Launch Vehicles
Presented By:
Kapil Kumar Sharma, (Sci./Eng.SD)
Control Design Division, CGSE
M. V. Dhekane, Deputy Director
Control Guidance & Simulation Entity, VSSC
-
8/11/2019 Application of Classical Control
2/52
The concept of the feedback loop
http://en.wikipedia.org/wiki/File:Feedback_loop_with_descriptions.svghttp://en.wikipedia.org/wiki/File:Feedback_loop_with_descriptions.svghttp://en.wikipedia.org/wiki/File:Feedback_loop_with_descriptions.svghttp://en.wikipedia.org/wiki/File:Feedback_loop_with_descriptions.svghttp://en.wikipedia.org/wiki/File:Feedback_loop_with_descriptions.svghttp://en.wikipedia.org/wiki/File:Feedback_loop_with_descriptions.svg
-
8/11/2019 Application of Classical Control
3/52
Control System Design Objectives
Primary Objectives:
1. Dynamic stability2. Accuracy
3. Speed of response
Addition Considerations:
4. Robustness (insensitivity to parameter variation)5. Cost of
control
6. System reliability
-
8/11/2019 Application of Classical Control
4/52
Control System Design Steps
Define the control system objectives.
Identify the system boundaries.
define the input, output and disturbancevariables
Determine a mathematical modelfor the
components and subsystems.
Combine the subsystems to form a model forthe whole system.
-
8/11/2019 Application of Classical Control
5/52
Control System Design Steps
Apply analysis and design techniques to
determine the control system structure andparameter values of
the control components,to meet the design objectives.
Testthe control design on a computer
simulation of the system. Implement and testthe design on the
actual
process or plant.
-
8/11/2019 Application of Classical Control
6/52
Digital Auto-Pilot (DAP)
Launch Vehicle Autopilot is an inner loop of the Navigation,
Guidance and Control (NGC) subsystem.
Controls the Attitude of the vehicle in Pitch, Yaw and Roll
channels from lift-off till end of flight.
It ensures the stabilisation of the attitude in the presence
of
disturbing forces and moments caused by various sources.
Steers the vehicle along a desired trajectory, maintaining
the
structural integrity.
-
8/11/2019 Application of Classical Control
7/52
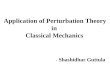
SpecificationOverall length : 49.128 m
Lift off Mass : 401.8 t
GTO payload : 1600 kg
Definition
(4L40+S125)+L37.5+C12.5
GSLV-MK2
Sensors : RESINS at EB ,
RGP at M
Actuators: SITVC, EGC(L40)
EGC(L37.5), CSCE,
OSS
-
8/11/2019 Application of Classical Control
8/52
GuidanceLaw
ControlLaw
PlantDynamics
Attitude Sensing
+ +
Pos/Velocity Sensing
Target
Attitude
Commands Actuator
Commands
Navigation Guidance and Control Loop
-
8/11/2019 Application of Classical Control
9/52
System
Input (d
Disturbance (d)
Controller
Output (q
c
command
Design Problem
Behavior of the output in presence of the disturbance maynot be
satisfactory
Controller has to ensure satisfactory response of the system
rejecting the disturbance
System will be modeled by using differential equations
The controller will process the input signal to
achievesatisfactory output.
-
8/11/2019 Application of Classical Control
10/52
i). Mathematical model of vehicle dynamics
ii). Design to meet specifications
iii). On-board implementation of AutopilotAlgorithm
iv). Validation
Design and development of Autopilot
consists following important elements.
-
8/11/2019 Application of Classical Control
11/52
Control Configuration
Control Power PlantPhysical Location / Alignment
Control Force / Moment
Dynamics
SensorsPlacement
Dynamics
BafflesPlacement
Characteristics
-
8/11/2019 Application of Classical Control
12/52
Model of the Systemto be controlledPlant :Rigid body,
Flexibility, Slosh Dynamics
Actuators :SITVC, EGS, FNC, RCS
Sensors :RGP,RESINS, LAP
Disturbances
Thrust misalignment, CG offset, DifferentialThrust, Winds
Tracking CommandsGenerated by Guidance Law
Specifications
Inputs for the Design
-
8/11/2019 Application of Classical Control
13/52
PL NT MODEL
RIGID BODY DYN MICS
LAUNCH VEHICLE MODELLING
CONTROL
POWER
PLANT
SENSOR
DYNAMICS
LIQUID SLOSH
STRUCTURES
PROPULSION
AERO DYNAMICS
-
8/11/2019 Application of Classical Control
14/52
Input Data:
Plant Model :Mass, Length, Diameter, CG, MI of vehicle
Control Power Plant :Actuator model (transfer function),
Nozzle mass, length, Inertia
Sensor Dynamics :Attitude & body rate transfer functions
Liquid Slosh :Pendulum Mass, Length, Distance of
pendulum hinge point from CG, Un-damped natural frequency,
Damping ratio
Structures :Bending mode Frequency, Generalized
mass, Mode shape, Mode slope,
Damping ratio
Launch Vehicle Modelling
-
8/11/2019 Application of Classical Control
15/52
Input Data:
Propulsion :Thrust
Aerodynamic :Aerodynamic (Lateral/Side) force coefficients,
Center of Pressure
Trajectory :Altitude, Mach Number, Inertial velocity
Atmosphere :Density
Dispersion level :Specified Uncertainty bounds
(example: Aero coefficients 3%,
Bending mode frequency 10% etc.)
Launch Vehicle Modelling
-
8/11/2019 Application of Classical Control
16/52
Assumptions:
Time Slice Approach:Time varying mass and inertia properties are
frozen over a short period of time
(Short Period Dynamics)
Small Angle Approximation:Deviations from Reference trajectories
are small so that trigonometric non-
linearity, and higher order terms contributions are
neglected.
Decoupling of Attitude Dynamics:Due to axis symmetry of launch
vehicles, Pitch/Yaw/Roll motions are assumed
to be decoupled.
NOTE: There is significant amount of coupling in Yaw/Roll motion
for aircraft.
Linear Time Invariant :Non-linearity of actuator/sensors
(Dead-zone, slew rate etc.) are neglected at
design phase.
(All above assumptions lead to LTI systems properties.)
Launch Vehicle Modeling
-
8/11/2019 Application of Classical Control
17/52
Design Specifications
Primary Specification-
Tracing Error < 1 Degree
Robustness Specifications
Rigid body
Aero margin > 6 dB
Phase margin > 30 Degree
Gain margin > 6 dB
Bending modes
Phase Margin > 40 Deg. : Phase Stabil isat ion
Attend. margin > 6 dB : Gain Stabil isat ion
Slosh modes
Phase margin > 30 Degree
-
8/11/2019 Application of Classical Control
18/52
Design Methodology
Classical Design TechniqueTracking Error Specification -
Bandwidth / Damping
Gain Design- PID
Frequency Domain Design
Roll off, Notch, Lag-Lead filter
Analysis using
Root Locus, Bode plot, Nyquist plot
i i i i
-
8/11/2019 Application of Classical Control
19/52
Rigid Body Rotational Dynamics
2
Assumptions: & sin( ) =
( )
( )
sin( )
where,
,
C C
C C
C CC
C
I L l T l
I L l T l
T l L
s
s s
l
I I
q d
q q d
q d d
q
d
: Attitude lC: Control moment arm
: Control variable I : Moment of inertia
: Angle of attack l: Aerodynamic moment arm
L : (QSCN ) Q: Dynamic Pressure, S Reference areaCN :
Aerodynamic Normal Force Coefficient, TC: Controlling Thrust
q
-
8/11/2019 Application of Classical Control
20/52
-
8/11/2019 Application of Classical Control
21/52
Root locus analysis
-
8/11/2019 Application of Classical Control
22/52
-
8/11/2019 Application of Classical Control
23/52
-
8/11/2019 Application of Classical Control
24/52
N i t Pl t @I + T
-
8/11/2019 Application of Classical Control
25/52
No. of open loop poles in RHP : P = 1
# counter-clockwise encirclement : N =1
Nyquist Plot @Ign. + T sec
Z = PN = 0
(STABLE)
-
8/11/2019 Application of Classical Control
26/52
G i D i M th d 2 (R t l it i )
-
8/11/2019 Application of Classical Control
27/52
Gain Design Method-2 (Root-locus criteria):
)
)
2
2 2 2
2
2
2
2
P
2
R
1 1 02
1 12
Characteristic eq.:
For s = - 1
Compute K from angle criteria
( K does not contribute in angle)
n
a C
P R
a a a
a C
P R
a
n n
a
n
a
K K ss s s
j
K K ss s s
)
)
2
0
2 2 2
2
2 2 2
P
Apply magnitude criteria,
Calculate K
1 1802
1 12
.
a C
P R
a a a
a C
P R
a a a
K K ss s s
K K ss s s
-
8/11/2019 Application of Classical Control
28/52
SLOSH
Lateral oscillations of liquids in tank is slosh
Modelled by replacing liquid mass with rigid
mass and a harmonic oscillator such as spring or
pendulum
Pendulum parameters are function of tank shape
and liquid level
M d li Li id Sl h
-
8/11/2019 Application of Classical Control
29/52
Modeling Liquid Slosh
Ref: NASA SP-106
The Force & Moments produced by sloshing of the liquid fuel
is
analyzed by an equivalent Mass and PendulumOr an equivalent
Spring MassAnalogy.
Ref: Elements of Control Theory by A. L. Greensite
-
8/11/2019 Application of Classical Control
30/52
Slosh Dynamics
-
8/11/2019 Application of Classical Control
31/52
Slosh Dynamics
2 2
0
th
th
th
th
( 2 ) ( ) ( )
: of i pendulum
: distance of i pendulum hinge point from body cg
: damping of i Pendulum: Undamped natural Frequenc
where
y i
,
of P
pi pi pi pi i pi pi
pi
pi
pi
pi
L s s w U L
L Length
q q
0
endulum
: Pendulum angle
: Lateral acceleration
: Forward inertial velocity
: attitude rate
i
w
U
q
NOTE: Complex Pole-zero pair is introduced in Rigid body
dynamics by each
Slosh mode.
-
8/11/2019 Application of Classical Control
32/52
N i t l t t i l h iti it i t t
-
8/11/2019 Application of Classical Control
33/52
Nyquist plot at maximum slosh sensitivity instant :
- Rigid Body with Slosh, Actuator, Sensor& delay
- Slosh margin 5.5 degree& 8.9 degree
-
8/11/2019 Application of Classical Control
34/52
Lag-lead compensator
(phase margin improvement)
Lag-Lead Compensator Bode plot
Modeling Flexibility Dynamics
-
8/11/2019 Application of Classical Control
35/52
Modeling Flexibility Dynamics
Ref: Elements of Control Theory by A. L. Greensite
( ) ( )( ) ( )
i i
i
u q t Bending Mode displacement:( )
(
t
t)
h
h
:Generalized Mode Shape of i Bending mode
:Generalized Co-ordinate of i
(
Bending mode
)
( )
i
i
q t
Where,
-
8/11/2019 Application of Classical Control
36/52
Flexibility Dynamics
1. Generalized mode shape is a function of vehicle length and
mass
distribution etc. Since mass of vehicle is rapidly decreasing,
Mode shape
is changing w.r.t. time. (Predicted with uncertainty bounds)
2. Generalized Co-ordinate dynamics is represented by second
order
differential equation.
2 ( ) ( ) ( ) 2 ( )( )( = 1, 2, 3...2 [ ] ) ,i i i i c iTs s
q
Mi d
3. Flexibility deflection is picked-up by attitude sensor &
Flexible-
deflection rate is picked-up by rate sensor.( )
( )
( )( )where,
( )
( )
i
R RG
i
i
R PG
i
ii
q i
q i
q q
q q
4. Complex Pole-zero pair is introduced in Rigid body dynamics
by each
Generalized Co-ordinate.
-
8/11/2019 Application of Classical Control
37/52
Bending Mode Stabilization
Gain Stabilization:
Attenuate control loop gain at desired frequency, to
ensurestability regardless of control loop phase uncertainty.
(Second/Higher BM are usually Gain stabilized)
Phase Stabilization:
Provide proper phase characteristics at desired frequency
toobtain a close loop damping, that is greater than the passive
damping.
(First/Second BM are usually Gain stabilized)
Gain-Phase Stabilization:A Rigid body/Flexible mode is said to
be gain-phase stabilize if it
is close loop stable with finite gain and phase margin.
Rigid Body + Flexibility
-
8/11/2019 Application of Classical Control
38/52
Rigid Body + Flexibility
Rigid Body poles : Two poles at origin [K/(s2- a)]
Actuator : Second order system [w2/s2+2*z*w*s+w2]
Slosh : 3 bending mode (complex pole zeros pair per bending
mode)
Uncompensated Bode plot Uncompensated Nyquist plot
Lag Compensator in Rate pathCompensated Nyquist Plot
-
8/11/2019 Application of Classical Control
39/52
Lag-lead & Roll off filter in forward path
BM1, BM2are Phase stabilized
BM3Gain stabilized
Compensated Nyquist Plot
-
8/11/2019 Application of Classical Control
40/52
-
8/11/2019 Application of Classical Control
41/52
Time Response Analysis
Step response analysis to check the timedomain specifications (
like percentageovershoot, rise time, settling time )are met.
In the time response all known nonlinearitieslike saturation of
actuator , slew rate limit ofactuator etc. has been modeled
properly.
All related states are monitored
-
8/11/2019 Application of Classical Control
42/52
-
8/11/2019 Application of Classical Control
43/52
Integrator limit Rate Control Limit
Dead-zone
Non-Linear Control
Block Diagram : ON-OFF Control with Dead-zone
d qpK
Cq
KRs
-
8/11/2019 Application of Classical Control
44/52
Control Law- Error computation
Gain Schedule
Filters Integrator
Nonlinear control Logics
Design parameters
-
8/11/2019 Application of Classical Control
45/52
Finite Word length Machine
Memory and Execution Time
Fixed point representation Accuracy and Scaling
Overflow problems
Transportation and computationaldelays
Implementation Aspects
C t l D i & V lid ti
-
8/11/2019 Application of Classical Control
46/52
Nominal
Plant (Vehicle + disturbances)
Non-failure Cases Failure Cases
Off
Nominal(3
)
Stress(3
- 6
) Over Stressed
unrealistic Cases
Act. failure Propulsion fail
Control Design & Validation
Philosophy
C t l D i & V lid ti
-
8/11/2019 Application of Classical Control
47/52
Nominal:Control design to meet performance
specifications.
Ensures Stability.
Design for linear zone. Small perturbations.
Off nominal:
Validation to ensure stability.
Slight performance deviations which areacceptable.
Design tested with nonlinearities touched.
Non-linear dynamics exercised.
Control Design & Validation
Philosophy
C t l D i & V lid ti
-
8/11/2019 Application of Classical Control
48/52
Stress:Stability to be ensured.
Large deviations in performance is expected and
accepted.
To be used mainly for software reliability
Over stress:
Even stability is not ensured.
To be used for Limits of Performanceassessment.
To define specification on other systems.
Control Design & Validation
Philosophy
C t l D i & V lid ti
-
8/11/2019 Application of Classical Control
49/52
Instability due to Inadequate control
Dynamics. (Control lagging disturbance)
High frequency instability
Coupling P/Y/R
Why systems fail where statically controlis available ?
Solution: Redesign of Autopilot accounting for
Nonlinear dynamics of Actuator
Saturation
Disturbance Time constant
Disturbance value
Control Design & Validation
Philosophy
-
8/11/2019 Application of Classical Control
50/52
Simulated Input Profile (SIP)
OBC In Loop Simulation (OILS)
Hardware In Loop Simulation (HLS)
Actuator In Loop Simulation (ALS)
Flight Test
Post flight analysis Disturbance calculation-
model matching Model Update / Design Update
Validation
-
8/11/2019 Application of Classical Control
51/52
Complexity of the model
Robust Design Requirement
Fault tolerance
SISO to MIMO
Unified Design Approach
Design Automation Code Automation
Challenges in Design
-
8/11/2019 Application of Classical Control
52/52
Acknowledgement
We sincerely acknowledge the contributions of all our seniors
and
colleagues in CGDG,VSSC towards the development of Launch
Vehicle
control design philosophy.