Embed Size (px)
DESCRIPTION
Jaehoon Jeong, Shuo Guo, Tian He and David Du Computer Science and Engineering, University of Minnesota {jjeong,sguo,tianhe,du}@cs.umn.edu. APL: Autonomous Passive Localization for Wireless Sensors Deployed in Road Networks. April 16th, 2008. IEEE INFOCOM 2008, Phoenix, AZ, USA. - PowerPoint PPT Presentation
Citation preview

APL: Autonomous Passive Localization for Wireless Sensors Deployed in Road Networks
IEEE INFOCOM 2008, Phoenix, AZ, USA
Jaehoon Jeong, Shuo Guo, Tian He and David DuComputer Science and Engineering, University of Minnesota
{jjeong,sguo,tianhe,du}@cs.umn.edu
April 16th, 2008
1

Problem Definition
Wireless SensorDeployment
Detection Timestamp
Target Detecting Sensors
2

APL Localization Sequence3
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching

APL Localization Sequence4
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching

APL Localization Sequence5
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching
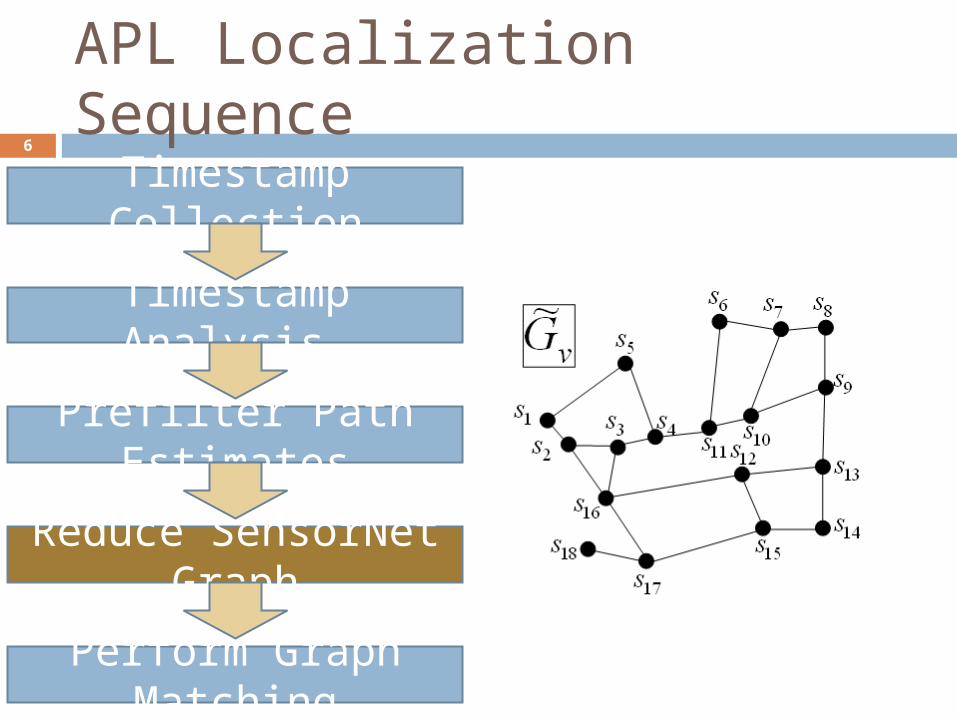
APL Localization Sequence6
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching

APL Localization Sequence7
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching
SensorNetwork
Road Network
Matching

APL Localization Sequence8
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching

APL Localization Sequence9
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching
Isomorphic

APL Localization Sequence10
Timestamp Analysis
Timestamp Collection
Prefilter Path Estimates
Reduce SensorNet Graph
Perform Graph Matching
Matching
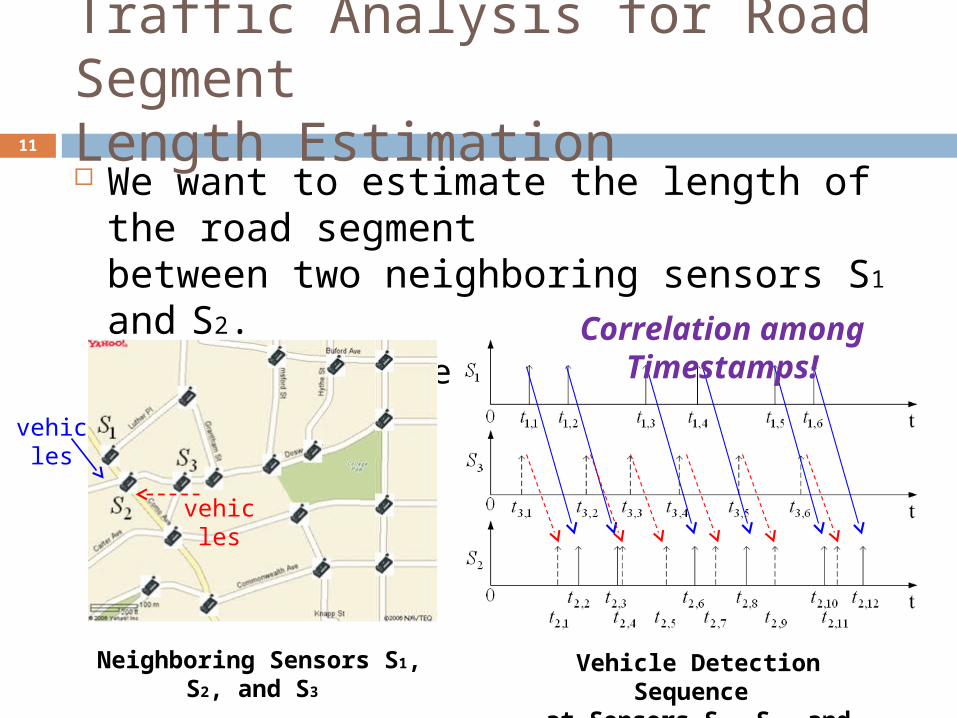
Traffic Analysis for Road SegmentLength Estimation We want to estimate the length of the road segment
between two neighboring sensors S1 and S2. There are three sensors S1, S2, and S3 as below:
Neighboring Sensors S1, S2, and S3 Vehicle Detection Sequence at Sensors S1, S2, and S3
11
Correlation among Timestamps!
vehicles
vehicles

Time Difference on Detection (TDOD)Operation
Time Difference On Detection(TDOD) for Sensors S1 and S2
Estimation of Movement Time through TDOD Operation
0 5 10 15 20 25 300
5
10
15
20
25
Time Difference [sec]
Fre
quen
cy (
Tim
e D
iffer
ence
Cou
nt)
Estimated Movement Time: 7.3 sec
m 7.10013.8*7.3V*TL Road Segment Length?
12

Comparison between Non-aggregation Method and Aggregation Method
0 5 10 15 20 25 300
2
4
6
8
10Non-aggregation Method
Time Difference [sec]
Fre
quen
cy
0 5 10 15 20 25 300
20
40
60
80Aggregation Method
Time Difference [sec]
Fre
quen
cyEstimated Movement Time
Estimated Movement Time
13
For Noise-Resilient Estimate,we compute Moving Average with
Time Difference Window of 10 seconds.
For Noise-Resilient Estimate,we compute Moving Sum with
Aggregation Window of 5 seconds.
0 5 10 15 20 25 300
2
4
6
8
10Non-aggregation Method
Time Difference [sec]
Fre
quen
cy
0 5 10 15 20 25 300
20
40
60
80Aggregation Method
Time Difference [sec]
Fre
quen
cyEstimated Movement Time
Estimated Movement Time
Aggregation Window
WrongEstimate
AccurateEstimate
Speed LimitV =50 km/h
Road LengthL =130 m
Movement TimeT = L/V=9.36 sec
26.8 sec
9.3 sec
Estimated Road LengthL’ =129.2 m

Outdoor Test for TDOD14
Test Road Network
Speed LimitV =64.4 km/h
Road (A, B)L =800 m
Movement TimeT = L/V= 44.7 sec
Speed LimitV =64.4 km/h
Road (B, C)L =900 m
Movement TimeT = L/V= 50.3 sec
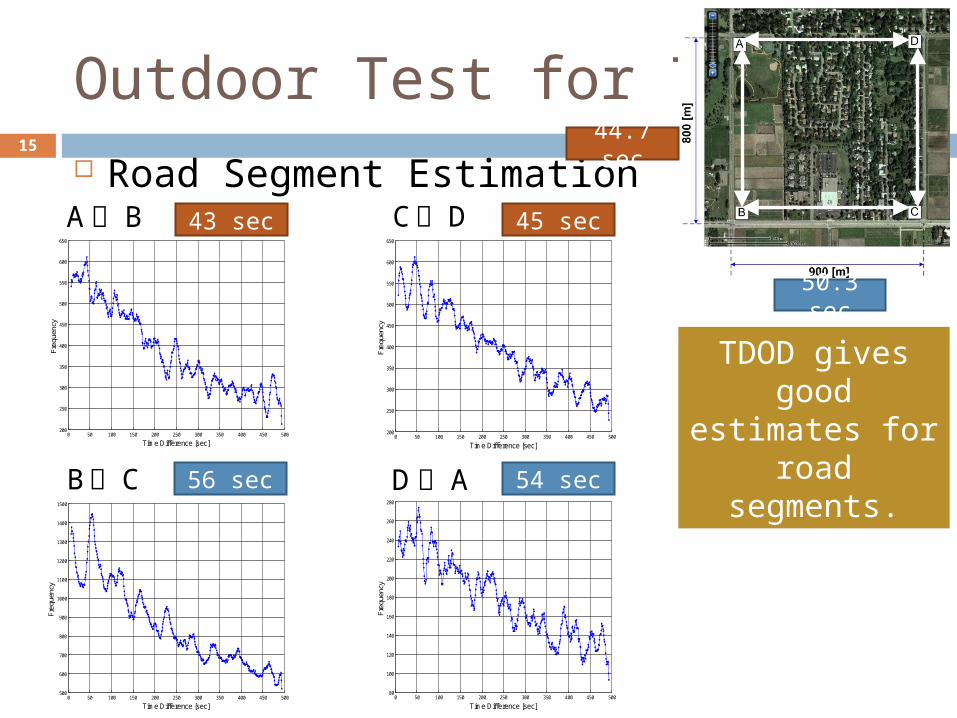
Outdoor Test for TDOD15
Road Segment Estimation
0 50 100 150 200 250 300 350 400 450 500200
250
300
350
400
450
500
550
600
650
Time Difference [sec]
Fre
quen
cy
A ՞ B 43 sec
0 50 100 150 200 250 300 350 400 450 500200
250
300
350
400
450
500
550
600
650
Time Difference [sec]
Fre
quen
cy
C՞ D 45 sec
0 50 100 150 200 250 300 350 400 450 500500
600
700
800
900
1000
1100
1200
1300
1400
1500
Time Difference [sec]
Fre
quen
cy
B՞ C 56 sec
0 50 100 150 200 250 300 350 400 450 50080
100
120
140
160
180
200
220
240
260
280
Time Difference [sec]
Fre
quen
cy
D՞ A 54 sec
44.7 sec
50.3 sec
TDOD gives good estimates for road
segments.

Path Estimate vs. Road Segment Estimate16
95 sec 95 sec
A ՞ B՞ C B՞ C՞ D
0 50 100 150 200 250 300 350 400 450 500200
250
300
350
400
450
500
550
600
Time Difference [sec]
Fre
qu
en
cy
A ՞ B՞ C 37 sec
0 50 100 150 200 250 300 350 400 450 500200
250
300
350
400
450
500
550
600
650
Time Difference [sec]
Fre
qu
en
cy
B՞ C՞ D 52 sec
TDOD cannot give good estimates for
paths.
Path estimate has a large deviation
per traffic measure.

Procedure of Prefiltering for Virtual Graph
(a) Road Sensor Network (b) Virtual Topology for Sensors
(c) Virtual Graph after Prefiltering based on Relative Deviation Error
(d) Virtual Graph after Prefiltering based on Minimum Spanning Tree
17
Isomorphic

Graph Matching
Now, we have a virtual graph whose subgraph is isomorphic to the real graph corresponding to the road network.
(a) Road Sensor Network
(b) Virtual Topologyof Wireless Sensors
(c) Virtual Graphfor Sensor Network
18
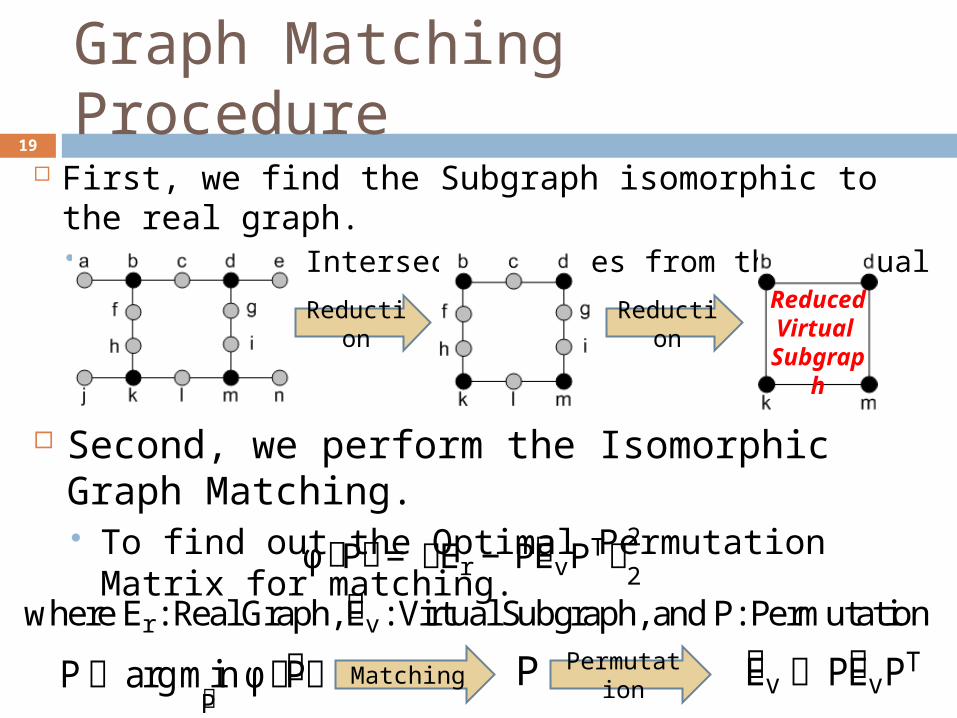
Graph Matching Procedure
First, we find the Subgraph isomorphic to the real graph. To find out Intersection Nodes from the Virtual Graph.
Second, we perform the Isomorphic Graph Matching. To find out the Optimal Permutation Matrix for matching.
Reduction Reduction
ϕሺPሻ= ฮEr − PE෩vPTฮ22 where Er: Real Graph, E෩v: Virtual Subgraph, and P: Permutation P ՚ argminP ϕ൫P൯ E v ՚ PE෩vPT Matching
ReducedVirtual
Subgraph
19
P Permutation

Graph Matching Example
Virtual Graph Virtual Subgraph
Road Network Real Graph
G෩v and Gr Isomorphic
Reduction
AbstractionPermutation
Matrix P
Mat
chin
g
20

Node Location Identification
Localization of Intersection Nodes We have localized Intersection Nodes with Permutation
Matrix P.
Localization of Non-intersection Nodes Let Gv = (Vv, Ev) be the virtual graph. Beginning from an intersection node u
in Ev, we create a path from u to another intersection node v such as
Virtual Graph
u ՜ a1 ՜ a2 ՜ …՜ am ՜ v
21
Real Graph
Node Localization Done!
u v
Performance Evaluation
We investigate the effect of the following three parameters on our localization: Maximum Time Synchronization Error Vehicle Speed Standard Deviation Vehicle Interarrival Time
Simulation Setting 18 sensors are deployed. 10-hour road traffic measurement Vehicle Speed: 50 km/h Default Time Synch Error: 0.01 sec Default Interarrival Time: 120 sec
Road Network
22

Performance Comparison between Road Segment Estimation Methods Maximum Time Synchronization Error
Up to 0.3-second time-synch error, 0% localization error rate can be achieved.
Vehicle Speed Standard Deviation Up to 10 km/h vehicle-speed deviation,
0% localization error rate can be achieved.
Vehicle Interarrival Time For the interarrival time greater than 1 second,
0% localization error rate can be achieved.
23
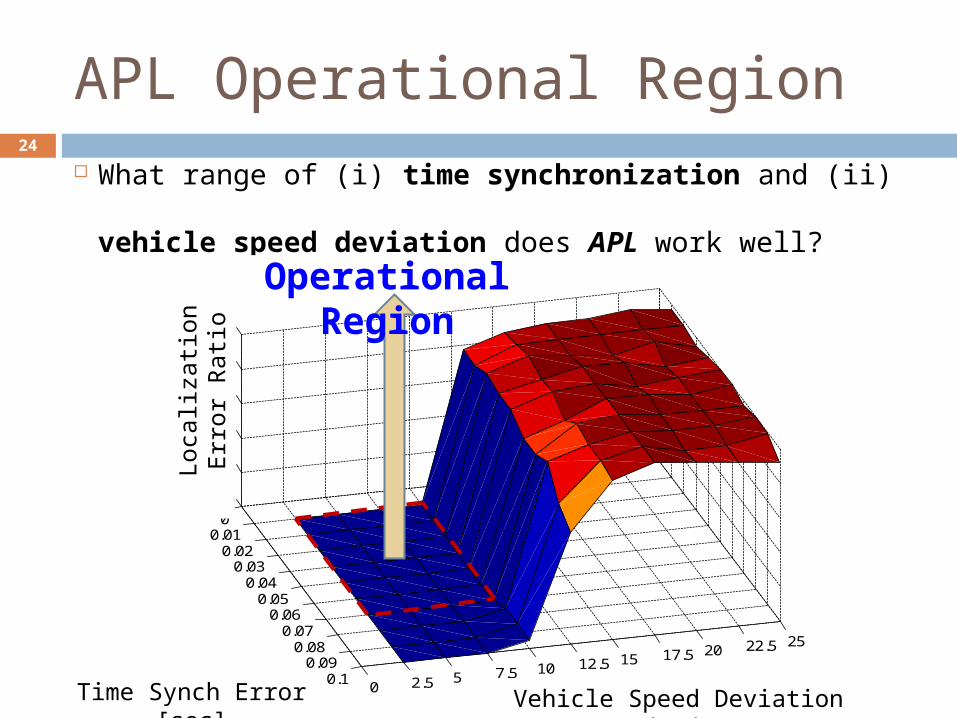
APL Operational Region
What range of (i) time synchronization and (ii) vehicle speed deviation does APL work well?
00.01
0.020.03
0.040.05
0.060.07
0.080.09
0.10 2.5 5 7.5 10 12.5 15 17.5 20 22.5 25
0
0.2
0.4
0.6
0.8
1
Vehicle Speed Deviation [km/h]Maximum Time Sync Error [sec]
Localiz
ation E
rror
Ratio
Vehicle Speed Deviation [km/h]Time Synch Error [sec]
Loc
aliz
atio
n E
rror
Rat
io
24
Operational Region

Conclusion
In sparse sensor networks over road networks, sensors cannot effectively obtain (i) pair-wise ranging distance or (ii) connectivity information. Our Autonomous Passive Localization (APL) works
well under realistic scenarios With Vehicle-detection timestamps and With Road map of target area.
As next step, we will perform the test of APL systemin real road networks with Motes such as XSM.
25

Q & A26





























