Embed Size (px)
Citation preview

Research ArticleAnalysis of Stochastic Predator-Prey Model with Disease in thePrey and Holling Type II Functional Response
C. Gokila ,1 M. Sambath,1 K. Balachandran,2 and Yong-Ki Ma 3
1Department of Mathematics, Periyar University, Salem 636 011, India2Department of Mathematics, Bharathiar University, Coimbatore 641 046, India3Department of Applied Mathematics, Kongju National University, Chungcheongnam-do 32588, Republic of Korea
Correspondence should be addressed to Yong-Ki Ma; [email protected]
Received 10 April 2020; Accepted 3 July 2020; Published 4 September 2020
Academic Editor: Stephen C. Anco
Copyright © 2020 C. Gokila et al. This is an open access article distributed under the Creative Commons Attribution License, whichpermits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
A stochastic predator-prey model with disease in the prey and Holling type II functional response is proposed and its dynamics isanalyzed. We discuss the boundedness of the dynamical system and find all feasible equilibrium solutions. For the stochasticsystems, we obtain the conditions for the existence of the global unique solution, boundedness, and uniform continuity. Wederive the conditions for extinction and permanence of species. Moreover, we construct appropriate Lyapunov functions anddiscuss the asymptotic stability of equilibria. To illustrate our theoretical findings, we have performed numerical simulationsand presented the results.
1. Introduction
Mathematical models are used to study the interrelationshipamong species and their environment. The study of diseasetransmission has turned out to be a valuable field of researchafter the fundamental work of Kermac andMcKendric [1] onsusceptible-infected framework. Hadeler and Freedman [2]first proposed a disease spread model within interacting pop-ulations. Initially, epidemics are created if there are somepeople susceptible to the infection and some infected peoplein the population. It is especially essential to view the ecosys-tem with the influence of epidemiological factors to controlthe disease in the species. From the ecological point of view,the spread of disease can not be disregarded because itseffects are serious. So, various authors have paid attentionto the study of transmissible disease in ecology, see for exam-ple [3–6] and the references therein. Mondal [7] has exam-ined the disease model with two species and analyzed thedynamical properties of the fractional order system. Haqueand Venturino [8] investigated the stability behavior of thedeterministic Holling-Tanner predator-prey model. In thispaper, we propose the predator-prey model and considerthe Holling type II response for predation.
In an ecological model, the interactions between two ormore species and their dynamics are influenced by eachother. So, the growth of one species depends on anotherand is described by the prey-predator system. Three primarykinds of interaction between the species are: predator-prey,mutualism, and competition. In all predator-prey interac-tions, Holling functions do not allow the growth of predatorsto very large extent even if the density of the prey is more.Specifically, Holling type II functional response is definedby a decelerating intake rate which follows from the assump-tion that the consumer is limited by its capacity to processfood. In other words, Holling type II represents the fact thatwhen prey density is small, the predator can take less time forhandling prey and if the prey density increases, more prey areattacked so that the handling time also increases. In this arti-cle, we have used Holling type II response for both infectedand susceptible prey interactions with the predator. This kindof functional response has been widely utilized as a part ofbiological systems, see few epidemic models [9–11] and che-mostat model [12].
During the past decades, a study of dynamical behavior ofthe population species with stochastic impacts has beengrowing steadily. The interesting situation occurs at the
HindawiAdvances in Mathematical PhysicsVolume 2020, Article ID 3632091, 17 pageshttps://doi.org/10.1155/2020/3632091

global stability of all feasible equilibria. Pitchaimani andRajaji [13] constructed the stochastic Nowak-May modeland investigated the asymptotic stability. In addition tostability, for every population model, the problem ofpermanence and boundedness property is also important.Solutions of the population model are called ultimatelybounded if they satisfy the following condition: if we findthe existence of bounded region in the solution space of oursystem such that each solution enters the bounded regionin limited time and remains within the region forever. Thepermanence gives a guarantee that if initially the density ofall species is positive, then after a specific time the densityof each species will be present in some sizeable amount.Ghosh et al. [14] illustrated a seasonally perturbed stochasticmodel and analyzed the persistence for three species. In theliterature, many results that study stability, boundedness,and persistence have been presented for some ecologicalmodels with stochastic effect [6, 10, 15–18].
Nonetheless, parameters associated with the system arenot fully constant, and they always change with time aroundsome average values. These fluctuations occur because ofsudden changes in the environment [19] or often createdby human interference and natural events in the ecosystemby disturbing the environment. Environmental changes aredescribed as natural disasters, human intervention, or animalor bird contact or infestation of invasive species. So theseenvironmental changes can be outlined as noise. Thesechanges are extreme and produce more effect on the popula-tion size in a particular time. Bringing environmental fluctu-ations into the predator-prey model is the correct way to dealwith this situation. May [20] has uncovered the reality thatthe birth rates, death rates, carrying capacities, and otherparameters which describe the remaining factors involvedin the ecological process carry the randomness to a large orlow extent due to ecological fluctuations. Accordingly, astime tends to be large, every equilibrium solution does notachieve a steady-state value accurately but it fluctuates con-tinuously around the steady state. Recently, Liu et al. [21]developed and analyzed a population model with Holling IIresponse and random effect. To study the model with fluctu-ations, several authors have introduced ecological fluctua-tions into every population model to accentuate the reality[11, 13, 16–18, 22–25]. The predator-prey model with twospecies and ratio dependence is discussed to examine its sta-bility of equilibrium solutions in [26]. Ji et al. [9] introducedtwo types of functional response and stochastic perturbationinto the system. Zhang et al. [27] found the critical value forthe stochastic predator-prey system which can be used todetermine the extinction and persistence in the mean of thepredator population. Zhang and Meng [6] developed thenonautonomous SIRI epidemic model with random distur-bance. The above researchers used various noises and differ-ent types of functional response depending on the populationmodel. By the above motivation, we consider the predator-prey model with environmental changes in this article.
The article is arranged as follows. In Section 2, we presentfew definitions, lemmas, and theorems which are utilized infurther analysis. In Section 3, we discuss the detailed explana-tion about the formulation and the condition that solution of
the deterministic model is bounded. For the stochastic sys-tem, we derive the existence of positive solution of the systemand its uniqueness and also explore the conditions for sto-chastic boundedness in Section 4. In addition, we prove thatthe solution is uniformly continuous. In Section 5, stochasticpermanence and extinction under certain parametric restric-tion are established. Using the corresponding Lyapunovfunction, we have examined the conditions on global asymp-totic stability in Section 6. Next, we have obtained somefigures to justify the results in Section 7. Finally, the conclu-sion based on our results is presented in Section 8.
2. Preliminaries
Here, we give certain notations, definitions, theorems, andlemmas which are used in the following analysis. For moredetails, see [28–31].
Consider the stochastic model (SM) of d-dimension ofthe form
dZ tð Þ = g Z tð Þ, tð Þdt + h Z tð Þ, tð ÞdB tð Þ, t0 ≤ t ≤ T <∞, ð1Þ
with Zðt0Þ = Z0. The functions g : Rd × ½t0, T�⟶ Rd and h: Rd × ½t0, T�⟶ Rd×m are Borel measurable, B = fBðtÞgt≥t0is an Rm-valued Wiener process, and Z0 is an Rd-valued ran-dom variable.
The differential operator L corresponding to the SM (1)is defined as
L = ∂∂t
+ 〠d
i=1gi z, tð Þ ∂
∂zi+ 12 〠
m
i,j=1h z, tð ÞgT z, tð Þ� �
ij
∂2
∂zi∂zj:
ð2Þ
Along with the existence and uniqueness assumptions,we make the assumption that g and h satisfy gðz∗, tÞ = 0and hðz∗, tÞ = 0 for an equilibrium solution z∗, for t ≥ t0.
Definition 1. The equilibrium solution z∗ of the SM (1) is sto-chastically stable if it satisfies for every ε > 0 and s ≥ t0,
limz0⟶z∗
ℙ sups≤t
∥Zs,z0 tð Þ − z∗∥≥ε� �
= 0, ð3Þ
where Zs,z0ðtÞ represents the solution of (1) with ZðsÞ = z0 attime t ≥ s.
Definition 2. The equilibrium solution z∗ of the SM (1) is saidto be stochastically asymptotically stable if it satisfies the sto-chastic stability condition and
limz0⟶z∗
ℙ limt⟶∞
Zs,z0 tð Þ = z∗� �
= 1: ð4Þ
Definition 3. The equilibrium solution z∗ of the SM (1) issaid to be globally stochastically asymptotically stable if it
2 Advances in Mathematical Physics

satisfies the stochastic stability condition and for every z0and every s,
ℙ limt⟶∞
Zs,z0 tð Þ = z∗� �
= 1: ð5Þ
Theorem 4 (see [28]). Let the functions g and h have con-tinuous coefficients with respect to t and satisfy the existenceand uniqueness properties.
(i) Suppose that a positive definite function V ∈ C2,1ðUk
× ½t0,∞ÞÞ exists, where Uk = fz ∈ Rd : ∥z − z∗∥ < kg,for k > 0, such that for all t ≥ t0, z ∈Uk : LVðz, tÞ≤ 0, then, the solution z∗ of (1) is stochastically stable
(ii) Additionally if V is decresing and a positive definitefunction V1 exists such that
V z, tð Þ ≤V1 zð Þ for all t ≥ t0, z ∈Uk : LV z, tð Þ ≤ 0, ð6Þ
then the equilibrium solution z∗ is stochastically asymptoti-cally stable
(iii) If the assumption (ii) holds for a radially unboundedfunction V ∈ C2,1ðRd × ½t0,∞ÞÞ defined everywhere,then the equilibrium solution z∗ is globally stochasti-cally asymptotically stable
Lemma 5 (see [29, 31]. Suppose that a stochastic process ZðtÞon t ≥ 0 of n -dimension satisfies
E Z tð Þ − Z sð Þj jα1 ≤ c t − sj j1+α2 , 0 ≤ s, t <∞, ð7Þ
where α1, α2, and c are arbitrarily nonnegative constants anda continuous modification ~ZðtÞ of ZðtÞ exists having the prop-erty that, for every υ ∈ ð0, α2/α1Þ, there exists a random vari-able ψðωÞ > 0 such that
ℙ ω : sup0< t−sj j<ψ ωð Þ,0≤s,t<∞
~Z t, ωð Þ − Z t, ωð Þ��� ���
t − sj jυ ≤2
1 − 2−υ
8<:
9=; = 1,
ð8Þ
that is, each sample path of ~ZðtÞ is locally but uniformlyHölder continuous with υ:
Definition 6 (see [30]). The solution ZðtÞ of model (1) is saidto be stochastically ultimately bounded, if, for any ε ∈ ð0, 1Þ,there is a constant δ = δðεÞ > 0, such that for any initial valueZ0 ∈ R3
+, the solution ZðtÞ of (1) satisfies
lim supt⟶∞
ℙ Z tð Þj j > δf g < ε: ð9Þ
Definition 7 (see [30]). The solution ZðtÞ of (1) possesses sto-chastic permanent property, if there exists a pair of constantsφ = φðνÞ > 0 and χ = χðνÞ > 0 for any ν ∈ ð0, 1Þ such that the
solution ZðtÞ of (1) for any initial value Z0 ∈ R3+ satisfies the
property
lim inft⟶∞
ℙ ∣Z tð Þ∣≥φf g ≥ 1 − ν, lim inft⟶∞
P ∣Z tð Þ∣≤χf g ≥ 1 − ν:
ð10Þ
3. Deterministic Model
In this section, we propose a predator-prey model with dis-ease among the prey population. Chattopadhyay and Bairagi[32] framed the ecoepidemiological model with two speciesdividing into three compartments in the Salton sea and ana-lyzed the stability of the positive equilibrium. Because of thedisease, susceptible prey and infected prey are there as twogroups in the prey population. The predator mostly eatsinfected prey because they are easy to catch. So these infectedpreys become more attractive to the predator. We haveassumed that both the preys are subject to predation by thepredator. In our article, we considered the population modelas in [32] with the inclusion of the susceptible prey and pred-ator interaction and functional response as Holling type II forinteraction in the following form:
dSdt
= rS 1 − S + IK
� �− λIS −
αPSm + S
,
dIdt
= −μI + λIS −βIPa + I
,
dPdt
= −dP + βIPa + I
+ αPSm + S
:
8>>>>>>><>>>>>>>:
ð11Þ
Here, SðtÞ, IðtÞ, and PðtÞ denote the population densitiesof susceptible prey, infected prey, and predator at any time twith Sð0Þ = S0 ≥ 0, Ið0Þ = I0 ≥ 0, and Pð0Þ = P0 ≥ 0. r, K , andλ represent the growth rate of S, carrying capacity of suscep-tible prey, and disease transmission coefficient. α is the searchrate of the predator towards susceptible prey and β is thesearch rate of predator towards infected prey, μ and d arethe natural death rates of infected prey and predator. Param-eters m and a are half saturation constants. System (11) canhave at most five equilibrium solutions:
(i) The trivial equilibrium solution E0 = ð0, 0, 0Þ(ii) The equilibrium solution E1 = ðK , 0, 0Þ lying on the
boundary
(iii) The planar equilibrium solution E2 = ðS2, I2, 0Þ onthe S − I plane where S2 = μ/λ and I2 = ðrðKλ − cÞÞ/ðλðr + KλÞÞ
(iv) Another planar equilibrium solution E3 = ðS3, 0, P3Þon the S − P plane where S3 = dm/ðα − dÞ and P3 =ðrðKmα − dm2 − dKmÞÞ/ðKðd − αÞ2Þ
(v) The positive equilibrium solution E4 = ðS∗, I∗, P∗Þwhich is obtained as follows:
3Advances in Mathematical Physics

Let S∗ be a nonnegative root of the following equation
g S∗ð Þ = S∗2 + CS∗ +D = 0, ð12Þ
where C = ð1/ðrð−d + α + βÞÞÞðadr + dKr − dmr − arα − Krα − Krβ +mrβ + adKλÞ and D = ð1/ðrð−d + α + βÞÞÞðadmr+ dKmr − aKαμ − Kmrβ + adKmλÞ.
The roots of the above quadratic equation are
S∗ = −C ±ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiC2 − 4D
p
2 : ð13Þ
When any one of the following cases is satisfied, the equi-librium solution S∗ can have one or two positive values.
(i) C < 0 and D < 0(ii) C < 0,D > 0 and C2 − 4D > 0(iii) C > 0,D < 0
where I∗ = ðaðdðm + S∗Þ − αS∗ÞÞ/ððβ − dÞðm + S∗Þ + αS∗Þ,P∗ = ððλS∗ − μÞða + I∗ÞÞ/β:
The following relations must hold for the positiveness ofI∗ and P∗:
αS∗ < d m + S∗ð Þ < β m + S∗ð Þ + αS∗ and λS∗ > μ: ð14Þ
The positive equilibrium solution plays a major role inchanging the dynamical behavior. It is the only solutionwhere all the species exist. All other equilibria are the sub-cases of the coexisting equilibrium solution. Therefore, it isessential to analyze the dynamical properties of positive equi-librium and also it gives the behavior of each species exactly.
Now, we provide certain conditions to bound the solu-tions of the system through the boundedness of the modelequation (11).
Theorem 8. All the solutions of system (11) in R3+ with positive
initial conditions are uniformly bounded.
Proof. To get the boundedness of solutions of given system(11), we consider the function
U = S + I + P: ð15Þ
Differentiate the above equation with respect to time t toobtain
dUdt
= dSdt
+ dIdt
+ dPdt
, = rS 1 − S + IK
� �− λIS −
αSPm + S
− μI + λIS −βIPa + I
− dP + βIPa + I
+ αPSm + S
,
= rS 1 − S + IK
� �− μI − dP:
ð16Þ
For each 0 ≤ η ≤min ðμ, dÞ, the following inequalityholds
dUdt
+ ηU ≤ r 1 − SK
� �+ η
� �S + η − μð ÞI
+ η − dð ÞP, ≤ K4r r + ηð Þ2:
ð17Þ
The maximum value of the quadratic function ax2 + bx+ c is c − ðb2/4aÞ when a < 0. In this way, we get the max R+
ðrð1 − ðS/KÞÞ + ηÞS as ðK/4rÞðr + ηÞ2 (refer [33]). Assumethat L = ðK/4rÞðr + ηÞ2 > 0, this implies
dUdt
+ ηU < L: ð18Þ
By the theory of differential inequalities, we get
0 ≤U S, I, Pð Þ < Lη
1 − e−ηt� �
+U S 0ð Þ, I 0ð Þ, P 0ð Þð Þe−ηt , ð19Þ
and letting t tend to infinity, the above solution is of the form
0 ≤U S, I, Pð Þ < Lη: ð20Þ
From the above discussion, we conclude that the solutionspace of system (11) lies within
D = S, I, Pð Þ ∈ R3+ ;U = L
η+ ε, for every ε > 0
�: ð21Þ
Hence, the theorem is proved.
4. Stochastic Model
In the natural world, each population in an ecosystem isgreatly affected by environmental noises which play a majorrole in population dynamics. By considering the effect of ran-dom environment fluctuations, we have included environ-mental noise in every equation of our deterministic system(11). In our system, the randomness in the environment willdirectly affect themselves as fluctuations in the growth rate ofthe susceptible prey, death rate of the infected prey popula-tion, and predator population like
r⟶ r + σ1 _B1 tð Þ, −μ⟶ −μ + σ2 _B2 tð Þ,−d⟶ −d + σ3 _B3 tð Þ,
ð22Þ
where BiðtÞ, i = 1, 2, 3 are independent Brownian motionsand σ2i ði = 1, 2, 3Þ denote the intensities of the environmen-tal fluctuations and σi ði = 1, 2, 3Þ represent the standard
4 Advances in Mathematical Physics

deviation. With this fact, we have framed the stochastic sys-tem by using the Itô equations as follows:
dS = S r 1 − S + IK
� �− λI −
αPm + S
� �dt + σ1SdB1 tð Þ,
dI = I −μ + λS −βPa + I
� �dt + σ2IdB2 tð Þ,
dP = P −d + βIa + I
+ αSm + S
� �dt + σ3PdB3 tð Þ:
8>>>>>>>><>>>>>>>>:
ð23Þ
During the past several years, no work has been reportedon the above stochastic model (23). Our aim is to find thedynamics of the stochastic system (23) and show how eachpopulation varies with respect to environmental fluctuations.
Now, we discuss some important properties like positive-ness, boundedness, and continuity of solution of the stochas-tic model (23).
Theorem 9. For ðS0, I0, P0Þ ∈ IntðR3+Þ, system (23) has a
unique positive local solution ðSðtÞ, IðtÞ, PðtÞÞ for t ∈ ½0, τeÞalmost surely, where τe is the explosion time.
Proof. Consider the transformation of variables
x = log S,y = log I,z = log P:
ð24Þ
Using the Itô formula,
LV =Vt t, xð Þ +Vx t, xð Þf t, xð Þ+ 12 trace gT t, xð ÞVxx t, xð Þg t, xð Þ� �
,ð25Þ
we get
Lx = r 1 − ex + ey
K
� �− λey −
αez
m + ex−12σ
21
� �,
dx =Lxdt + σ1dB1 tð Þ:ð26Þ
Similarly, we obtain, from system (23),
dx = r 1 − ex + ey
K
� �− λey −
αez
m + ex−12σ
21
� �dt + σ1dB1 tð Þ,
ð27Þ
dy = λex −βez
a + ey− μ −
12σ
22
� �dt + σ2dB2 tð Þ, ð28Þ
dz = βey
a + ey+ αex
m + ex− d −
12σ
23
� �dt + σ3dB3 tð Þ, ð29Þ
with xð0Þ = log Sð0Þ,yð0Þ = log Ið0Þ, and zð0Þ = log Pð0Þ.Now, the functions corresponding to system (28) have initial
growth and they satisfy the local Lipchitz property. Hence, aunique local solution ðxðtÞ, yðtÞ, zðtÞÞ exists and it is definedin ½0, τeÞ. Consequently, there exists a unique positive localsolution of (23) as SðtÞ = exðtÞ, IðtÞ = eyðtÞ, and PðtÞ = ezðtÞ.
Theorem 10. System (23) has a unique solution ðSðtÞ, IðtÞ, PðtÞÞ for t ∈ ½0, τeÞ and for any initial condition ðS0, I0, P0Þ ∈ IntðR3
+Þ and the solution remains in IntðR3+Þ with probability
one. Therefore, for all t ≥ 0, ðSðtÞ, IðtÞ, PðtÞÞ ∈ IntðR3+Þ almost
surely.
Proof. To show that the global solution exists, it is enough toprove that τ =∞ almost surely. Assume that κ0 is a largenonnegative integer such that the closed ball Bðκ0Þ ∈ R3
+ con-tains ðS0, I0, P0Þ. We choose for any κ ≥ κ0 and define thestop-time as
τκ = inf t ∈ 0, τe½ Þ: S ∉ 1κ, κ
� �or I ∉ 1
κ, κ
� �or P ∉
1κ, κ
� � �:
ð30Þ
Here, inf∅ =∞ (∅ is the empty set). Therefore, τκ isincreasing as κ⟶∞.
Let τ∞ = limκ⟶∞
τκ; then, τ∞ ≤ τe almost surely. If τ∞ =∞almost surely is true, then τe =∞ almost surely. If this state-ment fails, that is, if τ∞ ≠∞, then the two constants T > 0and ε ∈ ð0, 1Þ exist with
ℙ τ∞ ≤ Tf g > ε: ð31Þ
Thus, by denoting Ωκ = fτκ ≤ Tg, then κ1 ≥ κ0 is an inte-ger such that, for all κ ≥ κ1,
ℙ τκ ≤ Tf g ≥ ε: ð32Þ
Define V : IntðR3+Þ⟶ IntðR+Þ by
V S, I, Pð Þ = S − 1 − ln Sð Þ + I − 1 − ln Ið Þ + P − 1 − ln Pð Þ,ð33Þ
where the function VðS, I, PÞ > 0 for all ðS, I, PÞ ∈ IntðR3+Þ.
Using Itô’s formula, we get
LV = 1 − 1S
� �rS 1 − S + I
K
� �− λSI −
αPSm + S
� �
+ 12σ
21 + 1 − 1
I
� �−μI + λSI −
βIPa + I
� �
+ 12σ
22 + 1 − 1
P
� �−dP + βIP
a + I+ αPSm + S
� �+ 12σ
23,
= S − 1ð Þ r 1 − S + IK
� �− λI −
αPm + S
� �
+ I − 1ð Þ −μ + λS −βPa + I
� �+ P − 1ð Þ −d + βI
a + I+ αSm + S
� �
5Advances in Mathematical Physics

+ 12σ
21 +
12 σ
22 +
12 σ
23, = S − 1ð Þ r −
rK
S + Ið Þ − λI� �
+ I − 1ð Þ λS − μð Þ − d P − 1ð Þ + αS P − 1ð Þ − αP S − 1ð Þm + S
+ βI P − 1ð Þ − βP I − 1ð Þa + I
+ σ21 + σ22 + σ2
32 :
ð34Þ
Taking the differential of VðS, I, PÞ, one gets
dV S, I, Pð Þ = f S, I, Pð Þdt + g S, I, Pð ÞdB tð Þ, ð35Þ
where
g S, I, Pð Þ = σ1 S − 1ð Þ + σ2 I − 1ð Þ + σ3 P − 1ð Þ,
S, I, Pð Þ = σ21 + σ22 + σ23
2 − S − 1ð Þ rK
S + Ið Þ + λI − r� �
− I − 1ð Þ μ − λSð Þ − d P − 1ð Þ+ αS P − 1ð Þ − αP S − 1ð Þ
m + S+ βI P − 1ð Þ − βP I − 1ð Þ
a + I:
ð36Þ
From [29], it is easy to show that f ðS, I, PÞ is boundedabove, say by N , in R3
+ (that is to say ∣f ðS, I, PÞ ∣ ≤N , for allðS, I, PÞ ∈ R3
+). From equation (35), we have
ðτm∧T0
dV S, I, Pð Þ ≤ðτm∧T0
Ndt +ðτm∧T0
g S, I, Pð ÞdB tð Þ, ð37Þ
where τκ ∧ T =min fτκ, Tg. Taking the expectations of theabove inequality, one gets
EV S τκ ∧ Tð Þ, I τκ ∧ Tð Þ, P τκ ∧ Tð Þð Þ≤ V S 0ð Þ, I 0ð Þ, P 0ð Þð Þ +NT:
ð38Þ
Note that no less than one of Sðτκ, ωÞ, Iðτκ, ωÞ, andPðτκ, ωÞ belongs to the set fκ, 1/κg, for every ω ∈Ωκ;therefore, we get
V S τκ ∧ Tð Þ, I τκ ∧ Tð Þ, P τκ ∧ Tð Þð Þ≥ κ − 1 − ln κð Þ ∧ 1
κ− 1 − ln 1
κ
� �: ð39Þ
Hence, from (32),
EV S τκ ∧ Tð Þ, I τκ ∧ Tð Þ, P τκ ∧ Tð Þð Þ≥ E IΩκ ωð ÞV S τκ ∧ Tð Þ, I τκ ∧ Tð Þ, P τκ ∧ Tð Þð Þ
h i,
≥ ε κ − 1 − ln κð Þ ∧ 1κ− 1 − ln 1
κ
� �,
ð40Þ
in which IΩκðωÞ denotes the indicator function of Ωκ. Itfollows from (39) that
V S 0ð Þ, I 0ð Þ, P 0ð Þð Þ +NT ≥ ε κ − 1 − ln κð Þ ∧ 1κ− 1 − ln 1
κ
� �:
ð41Þ
κ⟶∞ leads to a contradiction: ∞>VðSð0Þ, Ið0Þ,Pð0ÞÞ +NT =∞: Therefore, τ∞ =∞ almost surely. Thus,τ =∞ then ðSðtÞ, IðtÞ, PðtÞÞ ∈ R3
+ almost surely.
With the existence of solution, next, we analyze how thesolution changes in R3
+.
Theorem 11. For any initial value W0 = ðS0, I0, P0Þ ∈ R3+, the
solutions of system (23) are stochastically ultimately bounded.
Proof. By Theorem 10, the solutionWðtÞ remains in R3+ for all
t ≥ 0. Consider the function V1ðt, SÞ = etSθ for θ > 0. Usingthe Itô formula, we compute
LV1 = etSθ 1 + r 1 − S + IK
� �− λI −
αPm + S
� �θ + θ − 1ð Þθ
2 σ21
� ,
≤ et 1 + rθ + θ − 1ð Þθ2 σ21
� �Sθ −
rθkSθ+1
� ≤M1 θð Þet:
ð42Þ
By considering the integral and expectation on two sidesof the above equation, we get etEðSθðtÞÞ − EðSθ0Þ ≤M1ðθÞet:So, we have lim supt⟶∞ESθðtÞ ≤M1ðθÞ < +∞.
Define the function V2ðt, IÞ = etIθ for θ > 0; using the Itôformula, we get
LV2 = etIθ 1 + −μ + λS −βPa + I
� �θ + θ − 1ð Þθ
2 σ22
� ,
≤ etIθ 1 + λθ − μθ + θ − 1ð Þθ2 σ22
� �� ≤M2 θð Þet:
ð43Þ
Then, etEðIθðtÞÞ − EðIθ0Þ ≤M2ðθÞet : So, we have limsupt⟶∞EIθðtÞ ≤M2ðθÞ < +∞. Similarly, defining the func-tion V3ðt, PÞ = etPθ for θ > 0 and applying the Itô formula,we get
LV3 = etPθ 1 + −d + βIa + I
+ αSm + S
� �θ + θ − 1ð Þθ
2 σ23
� ,
≤ etPθ 1 + β
aθ + α
mθ − dθ + θ − 1ð Þθ
2 σ23
� ≤M3 θð Þet:
ð44Þ
Then, etEðPθðtÞÞ − EðPθ0Þ ≤M3ðθÞet: So, we have lim
supt⟶∞EPθðtÞ ≤M3ðθÞ < +∞.
6 Advances in Mathematical Physics

For WðtÞ = ðSðtÞ, IðtÞ, PðtÞÞ ∈ R3+, we may get
W tð Þj jθ ≤ 3 max S3 tð Þ, I3 tð Þ, P3 tð Þ� �� �θ/3≤ 3θ/3 Sθ tð Þ + Iθ tð Þ + Pθ tð Þ
� �:
ð45Þ
Consequently,
lim supt⟶∞
E W tð Þj jp ≤M4 θð Þ < +∞, ð46Þ
where M4ðθÞ = 3θ/3ðM1ðθÞ +M2ðθÞ +M3ðθÞÞ. ApplyingChebyshev inequality, we get that all solutions are stochasti-cally bounded.
Using fundamental properties and suitable Lyapunovfunctions, we continue to show that the positive solution WðtÞ = ðSðtÞ, IðtÞ, PðtÞÞ is uniformly Hölder continuous.
Theorem 12. Every sample path of ðSðtÞ, IðtÞ, PðtÞÞ is uni-formly continuous, where ðSðtÞ, IðtÞ, PðtÞÞ is a solution of sys-tem (23) on t ≥ 0 with ðS0, I0, P0Þ ∈ R3
+.
Proof. The modified form of the first equation of system (23)is
S tð Þ = S0 +ðt0S uð Þ r 1 − S + I
K
� �− λI −
αPm + S
� �du
+ðt0σ1S uð ÞdB1 uð Þ:
ð47Þ
Assume that f1ðuÞ = SðuÞðrð1 − ððSðuÞ + IðuÞÞ/KÞÞ − λIðuÞ − ðαPðuÞ/ðm + SðuÞÞÞÞ and f 2ðuÞ = σ1SðuÞ:
From Theorem (28), we deduce that
E f1 tð Þj jθ = E S r 1 − S + IK
� �− λI −
αPm + S
� ���������θ
,
= E Sj jθ r − rS + IK
� �− λI −
αPm + S
��������θ
" #,
≤12E Sj j2θ + 1
2E r + rS + r + λð ÞI + αPj j2θ,
≤12E Sj j2θ + 44θ−3/2
hr2θ + r2θE Sj j2θ
+ r + λð Þ2θE Ij j2θ + α2θE Pj j2θi,
≤12M1 2θð Þ + 44θ−3/2
hr2θ + r2θM1 2θð Þ
+ r + λð Þ2θM2 2θð Þ + α2θM3 2θð Þi, = F1 θð Þ,
E f2 tð Þj jθ = E σ1S uð Þj jθ = σθ1E Sj jθ ≤ σθ1M1 θð Þ ≤ F2 θð Þ:ð48Þ
For stochastic integrals, we observe the moment inequal-ity and apply for 0 ≤ t1 ≤ t2 and θ > 2, to get
E
ðt2t1
f2 uð ÞdB1 uð Þ�����
�����θ
≤θ − 1ð Þθ2
� �θ/2t2 − t1ð Þθ−2/2
ðt2t1
E f2 uð Þj jθdu,
≤θ − 1ð Þθ2
� �θ/2t2 − t1ð Þθ/2F2 θð Þ:
ð49Þ
Then, for 0 < t1 < t2 <∞, t2 − t1 ≤ 1,ð1/θÞ + ð1/κÞ = 1, wehave
E S t2ð Þ − S t1ð Þj jθ
= E
ðt2t1
f1 uð Þdu +ðt2t1
f2 uð ÞdB1 uð Þ�����
�����θ
,
≤ 2θ−1Eðt2t1
f1 uð Þdu�����
�����θ
+ 2θ−1Eðt2t1
f2 uð ÞdB1 uð Þ�����
�����θ
,
≤ 2θ−1 t2 − t1ð Þθ/κEðt2t1
f1 uð Þj jθdu" #
+ 2θ−1 θ − 1ð Þθ2
� �θ/2
� t2 − t1ð Þθ/2F2 θð Þ, ≤2θ−1 t2 − t1ð Þθ/κF1 θð Þ t2 − t1ð Þ
+ 2θ−1 θ − 1ð Þθ2
� �θ/2t2 − t1ð Þθ/2F2 θð Þ,
= 2θ−1 t2 − t1ð ÞθF1 θð Þ + 2θ−1 θ − 1ð Þθ2
� �θ/2t2 − t1ð Þθ/2F2 θð Þ,
= 2θ−1 t2 − t1ð Þθ/2(
t2 − t1ð Þθ/2F1 θð Þ + θ − 1ð Þθ2
� �θ/2F2 θð Þ
),
≤ 2θ−1 t2 − t1ð Þθ/2 1 + θ − 1ð Þθ2
� �θ/2( )
F θð Þ,
ð50Þ
where FðθÞ =max fF1ðθÞ, F2ðθÞg: By Lemma 5, for eachexponent υ ∈ ð0, ðθ − 2Þ/2θÞ, we get that each sample pathof SðtÞ is uniformly and locallyHölder continuous and whichshows the uniform continuity of each sample path of SðtÞ ont ∈ R3
+. Similarly, the uniform continuity of IðtÞ and PðtÞ isproved on R3
+. Therefore, we get the uniform continuity ofeach sample path of ðSðtÞ, IðtÞ, PðtÞÞ to system (23) on t ≥ 0.
5. Long Time Behavior of System
Here, we look at the solution behaviour of system (23) as timebecomes very large. For that, we define the hypotheses whichare useful in further analysis.
H1ð Þ : Lηmax r
K, αm
n o+ 12 max σ21, σ22, σ2
3,� �
<min r − μ, r − df g,
H2ð Þ : r − σ212 < 0,
λ − μ −σ222 < 0,
α + β − d −σ232 < 0:
ð51Þ
7Advances in Mathematical Physics

First, we will prove stochastic permanence which plays anessential part in population dynamics. We discuss this prop-erty as follows:
Theorem 13. If the assumption ðH1Þ holds, then system (23)is stochastically permanent.
Proof. For any initial valueWð0Þ = ðSð0Þ, Ið0Þ, Pð0ÞÞ ∈ R3+, we
show that there exists a solution WðtÞ = ðSðtÞ, IðtÞ, PðtÞÞsuch that
lim supt⟶∞
E1
W tð Þj jγ� �
≤M, ð52Þ
where arbitrary nonnegative constant γ satisfies
Lηmax r
K, αm
n o+ γ + 1ð Þ
2 max σ21, σ22, σ23,
� �<min r − μ, r − df g:
ð53Þ
By (53), there is a positive constant ρ > 0 such that
min r − μ, r − df g − ρ −Lηmax r
K, αm
n o−12 max σ21, σ22, σ23,
� �> 0:
ð54Þ
Define VðS, I, PÞ = S + I + P for ðS, I, PÞ ∈ R3+ and ZðS, I,
PÞ = 1/VðS, I, PÞ; from the Itô formula, we have
dV S, I, Pð Þ = S r 1 − S + IK
� �− λI −
αPm + S
� �
+ I −μ + λS −βPa + I
� �+ P −d + βI
a + I+ αSm + S
� ��dt
+ σ1SdB1 tð Þ + σ2IdB2 tð Þ + σ3PdB3 tð Þð Þ,
dZ Wð Þ = −Z2 Wð Þ S r 1 − S + IK
� �− λI −
αPm + S
� ��
+ I −μ + λS −βPa + I
� �+P −d + βI
a + I+ αSm + S
� � �dt
+ Z3 Wð Þ σ1Sð Þ2 + σ2Ið Þ2 + σ3Pð Þ2� �dt
− Z2 Wð Þ σ1SdB1 tð Þ + σ2IdB2 tð Þ + σ3PdB3 tð Þð Þ,=LZ Wð Þdt − Z2 Wð Þ σ1SdB1 tð Þ + σ2IdB2 tð Þ + σ3PdB3 tð Þð Þ:
ð55Þ
Under the hypothesis ðH1Þ, we introduce γ as a positiveconstant such that condition (53) holds. By Itô’s formula,we obtain
L 1 + Z Wð Þð Þγ = γ 1 + Z Wð Þð Þγ−1LZ Wð Þ+ 12 γ γ − 1ð Þ 1 + Z Wð Þð Þγ−2Z4 Wð Þ
× σ1Sð Þ2 + σ2Ið Þ2 + σ3Pð Þ2� �:
ð56Þ
Next, we choose ρ > 0 to be small such that condition(54) holds. Then,
Leρt 1 + Z Wð Þð Þγ = ρeρt 1 + Z Wð Þð Þγ + eρtL 1 + Z Wð Þð Þγ,= eρt 1 + Z Wð Þð Þγ−2 ρ 1 + Z Wð Þð Þ2 + B
� �,
ð57Þ
where
B = −γZ2 Wð Þ S r 1 − S + IK
� �− λI −
αPm + S
� �
+ I −μ + λS −βPa + I
� �+ P −d + βI
a + I+ αSm + S
� ��
− γZ3 Wð Þ S r 1 − S + IK
� �− λI −
αPm + S
� �
+ I −μ + λS −βPa + I
� �+ P −d + βI
a + I+ αSm + S
� ��+ γZ3 Wð Þ σ1Sð Þ2 + σ2Ið Þ2 + σ3Pð Þ2� �+ γ γ + 1ð Þ
2 Z4 Wð Þ σ1Sð Þ2 + σ2Ið Þ2 + σ3Pð Þ2� �:
ð58Þ
The upper bound of the function ð1 + ZðWÞÞγ−2½ρð1 + ZðWÞ2Þ + B� is defined in the following way:
γZ3 Wð Þ σ1Sð Þ2 + σ2Ið Þ2 + σ3Pð Þ2� �≤ γZ Wð Þ max σ21, σ2
2, σ23
� �,
γ γ + 1ð Þ2 Z4 Wð Þ σ1Sð Þ2 + σ2Ið Þ2 + σ3Pð Þ2� �≤γ γ + 1ð Þ
2 Z2 Wð Þ max σ21, σ2
2, σ23� �
:
ð59Þ
Hence,
Leρt 1 + Z Wð Þð Þγ = eρt 1 + Z Wð Þð Þγ−2 ρ 1 + Z Wð Þð Þ2 + B� �
,
≤ eρt 1 + Z Wð Þð Þγ−2 ρ + 2ρ − γ min r − μ, r − df g�
+ γLη
max rK, αm
n o+ γ max σ21, σ22, σ23
� � Z Wð Þ
+ ρ − γ min r − μ, r − df g + γLη
max rK, αm
n o�
+ γ γ + 1ð Þ2 max σ21, σ22, σ2
3� �
Z2 Wð Þ�:
ð60Þ
From (53) and (54), we get a nonnegative constant Q sat-isfying Leρtð1 + ZðWÞÞγ ≤Qeρt . This implies that
E eρt 1 + Z Wð Þð Þγ� �≤ 1 + Z Wð Þð Þγ + Q eρt − 1ð Þ
ρ: ð61Þ
8 Advances in Mathematical Physics

Therefore,
lim supt⟶∞
E Zγ W tð Þð Þ½ � ≤ lim supt⟶∞
E 1 + Z W tð Þð Þð Þγ½ � ≤ Qρ:
ð62Þ
Note that,
S + I + Pð Þγ ≤ 3γ S3 + I3 + P3� �γ/3 = 3γ Wj jγ, ð63Þ
where W = ðS, I, PÞ ∈ R3+. Accordingly,
lim supt⟶∞
E1
W tð Þðj jγ�
≤ 3γlim supt⟶∞
E Zγ W tð Þð Þ½ � ≤ 3γ Qρ≔ R:
ð64Þ
Assume that φ = ðv/RÞ1/γ for any ν > 0; then, by Cheby-shev’s inequality, we get
P ∣W tð Þ∣<φf g = P W tð Þj j−γ > φ−γf g ≤ E W tð Þj j−γ½ �/φ−γ
= φγE W tð Þj j−γ½ �, ð65Þ
that is,
lim inft⟶∞
P ∣W tð Þ∣≥φf g ≥ 1 − ν: ð66Þ
Similarly, we can get χ > 0 for any ε > 0 such that liminf t⟶∞Pf∣WðtÞ∣≤χg ≥ 1 − ν. Hence, by Definition 7, sys-tem (23) is stochastically permanent.
In population dynamics, there is a chance to lose thespecies population fully. So, the study of disappearance ofspecies is also much important in the ecosystem.
Theorem 14. If the assumption ðH2Þ holds, then the solutionWðtÞ = ðSðtÞ, IðtÞ, PðtÞÞ of system (23) will be extinct withprobability one for any given initial value Wð0Þ = ðSð0Þ, Ið0Þ,Pð0ÞÞ ∈ R3
+.
Proof. Define V4 = ln S. By Itô’s formula, we obtain
d ln Sð Þ = r 1 − S + IK
� �− λI −
αPm + S
−12σ
21
� �dt + σ1dB1 tð Þ:
ð67Þ
Integrating it from 0 to t gives
ln S tð Þ = ln S 0ð Þ + r −σ212
� �t −
rK
ðt0S uð Þdu − r
K+ λ
� �ðt0I uð Þdu
− αðt0
P uð Þm + S uð Þ du + σ1
ðt0dB1 uð Þ:
ð68Þ
Then,
ln S tð Þ ≤ ln S 0ð Þ + r −σ212
� �t −
rK
ðt0S uð Þdu + σ1B1 tð Þ:
ð69Þ
Divide the above inequality on two sides by t and takingt⟶∞, we get
lim supt⟶∞
ln S tð Þt
≤ r −σ212 < 0, ð70Þ
almost surely.Also, define the Lyapunov function V5 = ln I; use Itô’s
formula to obtain
d ln Ið Þ = −μ + λS −βPa + I
−12σ
22
� �dt + σ2dB2 tð Þ: ð71Þ
Integrating this from 0 to t, we have
ln I tð Þ = ln I 0ð Þ − μ + σ222
� �t − λ
ðt0S uð Þdu
− βðt0
P uð Þa + I uð Þ du + σ2
ðt0dB2 uð Þ:
ð72Þ
Consequently,
ln I tð Þ ≤ ln I 0ð Þ + λ − μ −σ222
� �t + σ2B2 tð Þ: ð73Þ
Dividing above inequality by t and taking t⟶∞, weobtain
lim supt⟶∞
ln I tð Þt
≤ λ − μ −σ222 < 0, ð74Þ
almost surely.Similarly, we define the Lyapunov function V6 = ln P and
by Itô’s formula, we get
d ln Pð Þ = −d + βIa + I
+ αSm + S
−12σ
23
� �dt + σ3dB3 tð Þ:
ð75Þ
Integrating it, we get
ln P tð Þ = ln P 0ð Þ − d + σ232
� �t + β
ðt0
I uð Þa + I uð Þ du
+ αðt0
S uð Þm + S uð Þ du + σ3
ðt0dB3 uð Þ:
ð76Þ
9Advances in Mathematical Physics

Accordingly,
ln P tð Þ ≤ ln P 0ð Þ + α + β − d −σ232
� �t + σ3B3 tð Þ: ð77Þ
Then, dividing this by t and taking t⟶∞, we get
lim supt⟶∞
ln P tð Þt
≤ α + β − d −σ232 < 0, ð78Þ
almost surely.Hence, the desired assertion is proved.
6. Stochastic Asymptotic Stability
In this section, we prove that both planar and coexistenceequilibrium of system (23) are stochastically asymptoticallystable under certain assumptions.
Theorem 15. The equilibrium solution E1 = ðK , 0, 0Þ of sys-tem (23) is stochastically asymptotically stable on D, if
R0 ≤ 1, R1 ≤ 1,
12σ21K
S2≤ η1 S, I, Pð Þ,
ð79Þ
where η1ðS, I, PÞ = ðr/KÞðS − KÞ2 − ðλK − μÞI − ðαK/ðm +KÞ − dÞP:
Proof.We use Theorem (1) and construct the suitable Lyapu-nov function as follows:
V S, I, Pð Þ = S − K − K ln SK
� �+ I + P: ð80Þ
We define the infinitesimal generatorL on the Lyapunovfunction and get
LV S, I, Pð Þ = S − Kð Þ r 1 − S + IK
� �− λI −
αPm + S
�
+ −μI + λIS −βIPa + I
� + −dP + βIP
a + I+ αPSm + S
�
+ 12σ21K
S2, = S − Kð Þ r 1 − S + I
K
� �� − λI S − Kð Þ
−αPSm + S
+ αPKm + K
+ −μI + λIS −βIPa + I
�
+ −dP + βIPa + Ið Þ +
αPSm + S
� + 12σ21K
S2,
≤ S − Kð Þ r 1 − SK
� �� + λK − μð ÞI + αK
m + K− d
� �P
+ 12σ21K
S2, = −η1 S, I, Pð Þ + 1
2σ21K
S2:
ð81Þ
If R0 ≤ 1, R1 ≤ 1, it follows that η1ðS, I, PÞ ≥ 0. Byassumptions,LVðS, I, PÞ < 0 onD. Therefore, E1 is stochas-tically asymptotically stable.
Theorem 16. The equilibrium solution E2 = ðS2, I2, 0Þ of sys-tem (23) is stochastically asymptotically stable on D, if
d > d1,12σ21S2S2
+ 12σ22I2I2
≤ η2 S, I, Pð Þ,ð82Þ
where η2ðS, I, PÞ = ð3r/KÞðS − S2Þ2 + ðr/KÞðI − I2Þ2 − ððαS2/mÞ + ðβI2/aÞ − dÞ and d1 = ðmrβðKλ − μÞ + aαμðKλ + rÞÞ/ðamλðKλ + rÞÞ.
Proof. Consider the Lyapunov function for the equilibriumsolution E2
V S, I, Pð Þ = S − S2 − S2 lnSS2
� �+ I − I2 − I2 ln
II2
� �+ P:
ð83Þ
Define the infinitesimal generator L on the above func-tion as follows:
LV S, I, Pð Þ = S − S2ð Þ r 1 − S + IK
� �− I −
αPm + S
� + I − I2ð Þ
� −μ + λS −βPa + I
� + −dP + βIP
a + I+ αPSm + S
�
+ 12σ21S2S2
+ 12σ22I2I2
, = S − S2ð Þ�r
S2 + I2K
−S + IK
� �
− λ I − I2ð Þ − αPm + S
+ I − I2ð Þ λ S − S2ð Þ − βP
a + I
�
+ −dP + βIPa + Ið Þ + αPS
m + S
� + 12σ21S2S2
+ 12σ22I2I2
,
= −rK
S − S2ð Þ2 − rK
S − S2ð Þ I − I2ð Þ
+ αS2m + S
+ βI2a + I
− d�
P + 12σ21S2S2
+ 12σ22I2I2
,
≤ −rK
S − S2ð Þ2 − rK
S − S2ð Þ2 + I − I2ð Þ22
" #
+ αS2m + S
+ βI2a + I
− d�
P + 12σ21S2S2
+ 12σ22I2I2
,
≤−3r2K S − S2ð Þ2 − r
2K I − I2ð Þ2 + αS2m + S
+ βI2a + I
− d�
P
+ 12σ21S2S2
+ 12σ22I2I2
, = −η2 S, I, Pð Þ + 12σ21S2S2
+ 12σ22I2I2
:
ð84Þ
If d > d1 where d1 = ðmrβðKλ − μÞ + aαμðKλ + rÞÞ/ðamλðKλ + rÞÞ, we obtain η2ðS, I, PÞ ≥ 0. By assumptions, LVðS, I, PÞ < 0 on D. Therefore, E2 is stochastically asymptot-ically stable.
10 Advances in Mathematical Physics

Theorem 17. The equilibrium solution E3 = ðS3, 0, P3Þ of sys-tem (23) is stochastically asymptotically stable on D, if
m1 <m <m2 and12σ21S3S2
+ 12σ23P3
P2 ≤ η3 S, I, Pð Þ, ð85Þ
wherem1 = ðd − αÞðdK + 2r − 2KrÞ/2dr, m2 = μðα − dÞ/dλ,and η3ðS, I, PÞ = ððr/KÞ − ðαP3/ðm + S3ÞÞ + ðαS3/2ðm + S3ÞÞÞðS − S3Þ2 + ðαS3/2ðm + S3ÞÞðP − P3Þ2 − ðλS3 − μÞI.
Proof. The Lyapunov function for the equilibrium solution E3can be written as
V S, I, Pð Þ = S − S3 − S3 lnSS3
� �+ I + P − P3 − P3 ln
PP3
� �:
ð86Þ
Define the infinitesimal generator L on VðS, I, PÞ as
LV S, I, Pð Þ = S − S3ð Þ r 1 − S + IK
� �− λI −
αPm + S
�
+ −μI + λIS −βIPa + I
� + P − P3ð Þ −d + βI
a + I+ αSm + S
�
+ 12σ21S3S2
+ 12σ23P3P2 , ≤ S − S3ð Þ r 1 − S
K
� ��
+ S − S3ð Þ −λI −αP
m + S
� + −μI + λIS −
βIPa + I
�
+ P − P3ð Þ −d + βIa + I
+ αSm + S
� + 12σ21S3S2
+ 12σ23P3P2 ,
= −rK
S − S3ð Þ2 + S − S3ð Þ −λI + αP3m + S3
−αP
m + S
�
+ −μI + λIS −βIPa + I
� + P − P3ð Þ βI
a + I+ αSm + S
−αS3
m + S3
�
+ 12σ21S3S2
+ 12σ23P3P2 , ≤ −
rK
S − S3ð Þ2 + λS3 − μð ÞI
−α S − S3ð Þ PS3 − SP3ð Þ
m + Sð Þ m + S3ð Þ + 12σ21S3S2
+ 12σ23P3P2 ,
= −rK
S − S3ð Þ2 + λS3 − μð ÞI + αP3 S − S3ð Þ2m + Sð Þ m + S3ð Þ
−αS3 S − S3ð Þ P − P3ð Þ
m + Sð Þ m + S3ð Þ + 12σ21S3S2
+ 12σ23P3P2 , ≤ −
rK
S − S3ð Þ2
+ λS3 − μð ÞI + αP3 S − S3ð Þ2m + Sð Þ m + S3ð Þ −
αS3m + Sð Þ m + S3ð Þ
× S − S3ð Þ2 + P − P3ð Þ22
" #+ 12σ21S3S2
+ 12σ23P3P2 ,
= −rK
−αP3
m + Sð Þ m + S3ð Þ + αS32 m + Sð Þ m + S3ð Þ
� S − S3ð Þ2
−αS3 P − P3ð Þ2
2 m + Sð Þ m + S3ð Þ + λS3 − μð ÞI + 12σ21S3S2
+ 12σ23P3P2 ,
≤ −rK
−αP3
m + S3ð Þ + αS32 m + S3ð Þ
� S − S3ð Þ2
−αS3 P − P3ð Þ22 m + S3ð Þ + λS3 − μð ÞI + 1
2σ21S3S2
+ 12σ23P3P2 ,
= −η3 S, I, Pð Þ + 12σ21S3S2
+ 12σ23P3P2 :
ð87Þ
One can see that η3ðS, I, PÞ ≥ 0, if m1 <m <m2 wherem1 = ðd − αÞðdK + 2r − 2KrÞ/2dr and m2 = μðα − dÞ/dλ. Byassumptions, LVðS, I, PÞ < 0 on D. Therefore, E3 of system(23) is stochastically asymptotically stable.
Theorem 18. The equilibrium solution E4 = ðS∗, I∗, P∗Þ ofsystem (23) is stochastically asymptotically stable on D, if
r1 < r < r2,12σ21S
∗
S2+ n1
2σ22I
∗
I2+ n2
2σ23P
∗
P2 ≤ η4 S, I, Pð Þ,ð88Þ
where r1 = ð1/2KÞððαP∗/ðm + S∗ÞÞ − ðλðn1 − 1Þ/2ÞÞ, r2 = ð1/2KÞððλðn1 − 1Þ/2Þ − ðβP∗/ða + I∗ÞÞÞ, and η4ðS, I, PÞ = ððr/2KÞ − ðαP∗/ðm + S∗ÞÞ + ðλðn1 − 1Þ/2ÞÞðS − S∗Þ2 + ððλðn1 − 1Þ/2Þ − ðr/2KÞ−n1βP∗/a + I∗ÞðI − I∗Þ2,
for n1 = aðm + S∗Þ/mða + I∗Þ and n2 = ðm + S∗Þ/m.
Proof.Construct the suitable Lyapunov function for the coex-istence equilibrium as follows
V S, I, Pð Þ = S − S∗ − S∗ ln SS∗
� �+ n1 I − I∗ − I∗ ln I
I∗
� �
+ n2 P − P∗ − P∗ ln PP∗
� �,
ð89Þ
where ni > 0, ði = 1, 2Þ are suitable constants to be deter-mined in further analysis. Define the infinitesimal generatorL on VðS, I, PÞ and we get
LV S, I, Pð Þ = S − S∗ð Þ r 1 − S + IK
� �− λI −
αPm + S
�
+ n1 I − I∗ð Þ −μ + λS + βPa + I
� + n2 P − P∗ð Þ −d + βI
a + I+ αSm + S
�
+ 12σ21S
∗
S2+ n1
2σ22I
∗
I2+ n2
2σ23P
∗
P2 ,
= S − S∗ð Þ −rK
S − S∗ð Þ − rK
I − I∗ð Þ − λ I − I∗ð Þ + αP∗
m + S∗−
αPm + S
�
+ n1 I − I∗ð Þ λ S − S∗ð Þ + βP∗
a + I∗−
βPa + I
�
+ n2 P − P∗ð Þ βIa + I
−βI∗
a + I∗
�+ αSm + S
−αS∗
m + S∗
+ 12σ21S
∗
S2+ n1
2σ22I
∗
I2+ n2
2σ23P
∗
P2 ,
= −rK
−αP∗
m + Sð Þ m + S∗ð Þ� �
S − S∗ð Þ2 + n1βP∗
a + Ið Þ a + I∗ð Þ� �
I − I∗ð Þ2
11Advances in Mathematical Physics

− λ n1 − 1ð Þ − rK
� �I − I∗ð Þ S − S∗ð Þ
+ −n1β + n2βaa + I∗ð Þ
� �I − I∗ð Þ P − P∗ð Þ
a + Ið Þ+ −α + n2mα
m + S∗ð Þ� �
P − P∗ð Þ S − S∗ð Þm + Sð Þ + 1
2σ21S
∗
S2+ n1
2σ22I
∗
I2
+ n22σ23P
∗
P2 , ≤ −rK
−αP∗
m + S∗ð Þ� �
S − S∗ð Þ2 + n1βP∗
a + I∗ð Þ� �
I − I∗ð Þ2
− λ n1 − 1ð Þ − rK
� �× I − I∗ð Þ2 + S − S∗ð Þ2
2
" #
+ −n1β + n2βaa + I∗ð Þ
� �I − I∗ð Þ P − P∗ð Þ
a + Ið Þ+ −α + n2mα
m + S∗ð Þ� �
P − P∗ð Þ S − S∗ð Þm + Sð Þ + 1
2σ21S
∗
S2+ n1
2σ22I
∗
I2
+ n22σ23P
∗
P2 , = r2K −
αP∗
m + S∗+ λ n1 − 1ð Þ
2
� �S − S∗ð Þ2
+ λ n1 − 1ð Þ2 −
r2K −
n1βP∗
a + I∗
� �× I − I∗ð Þ2
+ −n1β + n2βaa + I∗ð Þ
� �I − I∗ð Þ P − P∗ð Þ
a + Ið Þ+ −α + n2mα
m + S∗ð Þ� �
P − P∗ð Þ S − S∗ð Þm + Sð Þ + 1
2σ21S
∗
S2+ n1
2σ22I
∗
I2
+ n22σ23P
∗
P2 , = −η4 S, I, Pð Þ + 12σ21S
∗
S2+ n1
2σ22I
∗
I2+ n2
2σ23P
∗
P2 :
ð90Þ
One can observe that η4ðS, I, PÞ ≥ 0, if r1 < r < r2 wherer1 = ð1/2KÞððαP∗/ðm + S∗ÞÞ − ðλðn1 − 1Þ/2ÞÞ and r2 = ð1/2KÞððλðn1 − 1Þ/2Þ − ðβP∗/ða + I∗ÞÞÞ. By assumptions, LVðS,I, PÞ < 0 on D. Therefore, E4 of system (23) is stochasticallyasymptotically stable.
7. Numerical Simulation
From the practical point of view, numerical results play amajor role in population dynamics. Here, we have providedgraphical solution curves to carry out and check our theoret-ical results of system (23). To find the strong solution ofsystem (23) with given initial value, Higham [34] introducedMilstein method. By using this method, we have derivedthe following discretization equations from our given sys-tem (23):
Sk+1 = Sk + Sk r 1 − Sk + IkK
� �− λIk −
αPk
m + Sk
� �Δt
+ σ1SkffiffiffiffiffiΔt
pξk +
σ212 Sk ξ2k − 1
� �Δt,
Ik+1 = Ik + Ik λSk −βPk
a + Ik− μ
� �Δt + σ2Ik
ffiffiffiffiffiΔt
pηk +
σ222 Ik η2k − 1
� �Δt,
Pk+1 = Pk + PkβIka + Ik
+ αSkm + Sk
− d� �
Δt + σ3Pk
ffiffiffiffiffiΔt
pζk
+ σ232 Pk ζ2k − 1
� �Δt,
ð91Þ
where Δt is a positive time increment parameter andξk, ηk, ζk, ðk = 1, 2, 3,⋯, nÞ represent independent ran-dom Gaussian variables Nð0, 1Þ, it is given with the help ofpseudorandom number generators. Using MATLAB soft-ware and possible parameters, we have generated the solutioncurves of the deterministic system (11) and correspondingstochastic system (23).
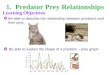
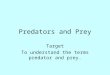
In Figures 1–3, we take the initial conditions Sð0Þ = 0:1,Ið0Þ = 0:1, and Pð0Þ = 0:1 and parameters r = 1, K = 3, β = 1,α = 1:15, c = 0:7, d = 1, a = 1, m = 1, and λ = 0:5. The onlydifference between Figures 1–3 is the intensities of environ-mental changes. Specially, we choose σ1 = σ2 = σ3 = 0:1 inFigure 1; in Figure 2, we have chosen σ1 = σ2 = σ3 = 0:04and in Figure 3 σ1 = σ2 = σ3 = 0:01. From Figures 1–3, wehave observed that the coexistence equilibrium ðS∗, I∗, P∗Þsolution curves of stochastic model (23) always oscillateswith respect to the curves of the deterministic model (11).From Figures 1–3, we have arrived at the conclusion thatwith the decrease in the values of σ1, σ2, σ3 the fluctuationsof the solution curves of the stochastic system are reducedand coincide with that of the solution curves of the determin-istic system.
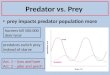
In Figure 4, the parametric values are r = 0:09, K = 4,β = 0:09, α = 1:1, c = 0:02, d = 0:8, a = 1, m = 1, and λ =0:005 with initial values Sð0Þ = 1:5, Ið0Þ = 0:8, Pð0Þ = 0:6.By Theorem 14, we observe that all the species in the stochas-tic case (23) disappear completely under the hypothesis ðH1Þand we have seen this graphically via Figure 4. Further, wehave simulated the corresponding deterministic case inFigure 4 which satisfies condition (14) and leading to the per-manence of each species. Under parametric values r = 0:001,K = 2:5, β = 0:01, α = 0:04, c = 0:02, d = 0:01, a = 1, m = 1,and λ = 0:003 and initial parametric condition Sð0Þ = 2, Ið0Þ= 1:3, Pð0Þ = 0:5, by Theorem 14, all the species of the sto-chastic system (23) as well as corresponding deterministicsystem (11) disappear fully under the hypothesis ðH1Þ andthe solution curves are shown in Figure 5. If the deterministicsystem goes to extinction, the stochastic system also goes toextinction, in which case solution is not dependent on theintensity of noise value (Compare Figure 4 with Figure 5).
Furthermore, in Figure 6, parameters chosen are r = 3,K = 3, β = 1:5, α = 1, c = 1, d = 1, a = 1, m = 1, and λ = 1:7with initial values Sð0Þ = 1:5, Ið0Þ = 0:8, Pð0Þ = 0:1 and simu-lations also confirm the result that all three species of system(11) and (23) are permanent by Theorem 13.
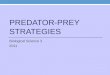
Finally, Figure 7 illustrates the Theorem 18. We choosethe parameters r = 2:5, K = 3, α = 1:5, β = 0:9, c = 0:8, d = 1,m = 1, a = 1, and λ = 1:2with different initial values satisfyingcondition (88). Theorem 18 says that ðS∗, I∗, P∗Þ of (23) isstochastically asymptotically stable.
8. Concluding Remarks
In reality, predator-prey system reacts to more consequencesin the environmental changes in the ecosystem. So, the studyof dynamical behavior of the predator-prey model has beenreceiving more attention, and many efforts have been takenin the field of population dynamics by several authors. Toovercome the effect of random fluctuations and control the
12 Advances in Mathematical Physics

disease in an ecosystem, we have proposed the stochasticHolling type II predator-prey model (23) with disease inthe prey. We are interested to know the changes of dynamicalbehavior of model (23) with respect to the intensities ofenvironmental fluctuations. There is also need to reveal therelationship between the intensities of the environmental
fluctuations and parameters associated with the system sincethe predator-prey model is disturbed by environmentalnoises.
First, we explain the basic assumptions of our model (11)with boundedness of solutions. We have introduced the sto-chastic term to the deterministic model (11) and proved that
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3
Time
Popu
latio
n siz
e
DeterministicP(t) – predatorS(t) – susceptible prey
I(t) – infected prey
Figure 2: Simulation showing the solution curves of deterministic system (11) and corresponding stochastic system (23) with noiseσ1 = σ2 = σ3 = 0:04:
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3
3.5
Time
Popu
latio
n siz
e
DeterministicP(t) – predatorS(t) – susceptible prey
I(t) – infected prey
Figure 1: Simulation showing the solution curves of deterministic system (11) and corresponding stochastic system (23) with large noiseσ1 = σ2 = σ3 = 0:1.
13Advances in Mathematical Physics

for any positive initial value there exists a positive globalsolution of the stochastic system (23). For a stochasticpredator-prey model, the boundedness of a solution is alsoverified because it gives a guarantee of system validity. InTheorem 12, we have checked the property of uniform conti-
nuity of the positive solution of system (23). Permanence andextinction property are provided for system (23) since as timetends to be large it validates the long time and short time sur-vival in a ecosystem. Under assumption ðH1Þ, our stochasticsystem (23) attains the permanence. The stochastic system
0 100 200 300 400 500 600 700 8000
0.5
1
1.5
2
2.5
3
3.5
Time
Popu
latio
n siz
e
DeterministicP(t) – predatorS(t) – susceptible prey
I(t) – infected prey
Figure 4: Simulation showing that the solutions of the stochastic system (23) become extinct with σ1 = 0:5, σ2 = 0:2, σ3 = 0:3 and thesolutions of the deterministic system (11) are persistent.
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3
Time
Popu
latio
n siz
e
DeterministicP(t) – predatorS(t) – susceptible prey
I(t) – infected prey
Figure 3: Simulation showing the solution curves of deterministic system (11) and corresponding stochastic system (23) with small noiseσ1 = σ2 = σ3 = 0:01:
14 Advances in Mathematical Physics

goes to extinction state if the assumption ðH2Þ holds. Fur-thermore, with the help ofthe Lyapunov function theory wehave examined the stochastic asymptotic stability of all feasi-ble equilibrium solutions of (23). The parametric restriction
for stochastic stability is established. (see the inequalities inTheorem 15, 16, 17, and 18).
In a stochastic system, we have observed that if theintensities of the environmental changes increase, the
0 100 200 300 400 5000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time
Popu
latio
n siz
e
DeterministicP(t) – predatorS(t) – susceptible prey
I(t) – infected prey
Figure 6: Simulation showing that the solution curves of both deterministic system (11) and corresponding stochastic system (23) arepermanent with σ1 = 0:05, σ2 = 0:04, σ3 = 0:06.
0 100 200 300 400 500 600 7000
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Time
Popu
latio
n siz
e
DeterministicP(t) – predatorS(t) – susceptible prey
I(t) – infected prey
Figure 5: Simulation showing that the solution curves of both deterministic system (11) and corresponding stochastic system (23) are extinctwith σ1 = 0:5, σ2 = 0:2, σ3 = 0:3:
15Advances in Mathematical Physics

fluctuations of the solutions increase. The numerical resultshows that if the strong environmental changes happen inan ecosystem making each species to disappear it can occurin reality while the stochastic system (23) can maintain per-manence under sufficiently small environmental noise. Inpermanence, if we decrease the level of environmental fluc-tuations, solutions become stable. By the above fact, the sto-chastic results give more accurate results compared to thedeterministic results.
Data Availability
Our paper contains numerical experimental results, andvalues for these experiments are included in the paper. Thedata is freely available.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
Acknowledgments
The research work of the first author is supported by theDST-INSPIRE Fellowship (No. DST/INSPIRE Fellowshi-p/2017/IF170244), Department of Science and Technology,New Delhi. The second author is thankful to UGC(BSR)-Start Up Grant (Grant No. F.30-361/2017(BSR)), UniversityGrants Commission, New Delhi and the third author isthankful to UGC BSR Faculty Fellowship, University GrantsCommission, New Delhi. This work was supported by theresearch grant of the Kongju National University in 2020and this research was supported by Basic Science ResearchProgram through the National Research Foundation ofKorea (NRF) funded by the Ministry of Education (No.2018R1D1A1B07049623) to the last author.
References
[1] W. O. Kermack and A. G. McKendrick, “Contributions to themathematical theory of epidemics. II. —the problem of ende-micity,” Proceedings of the Royal Society of London. Series A,Containing Papers of a Mathematical and Physical Character,vol. 138, no. 834, pp. 55–83, 1997.
[2] K. P. Hadeler and H. I. Freedman, “Predator-prey populationswith parasitic infection,” Journal of Mathematical Biology,vol. 27, no. 6, pp. 609–631, 1989.
[3] D. Greenhalgh and M. Haque, “A predator-prey model withdisease in the prey species only,” Mathematicsl Methods inthe Applied Sciences, vol. 30, no. 8, pp. 911–929, 2007.
[4] Y. Xiao and L. Chen, “Modeling and analysis of a predator-prey model with disease in the prey,” Mathematical Biosci-ences, vol. 171, no. 1, pp. 59–82, 2001.
[5] T. Zhang and Z. Teng, “Global asymptotic stability of adelayed SEIRS epidemic model with saturation incidence,”Chaos, Solitons & Fractals, vol. 37, no. 5, pp. 1456–1468,2008.
[6] W. Zhang and X. Meng, “Stochastic analysis of a novel nonau-tonomous periodic SIRI epidemic system with random distur-bances,” Physica A, vol. 492, pp. 1290–1301, 2018.
[7] S. Mondal, A. Lahiri, and N. Bairagi, “Analysis of a fractionalorder eco-epidemiological model with prey infection and type2 functional response,” Mathematicsl Methods in the AppliedSciences, vol. 40, no. 18, pp. 6776–6789, 2017.
[8] M. Haque and E. Venturino, “The role of transmissible dis-eases in the Holling-Tanner predator-prey model,” TheoreticalPopulation Biology, vol. 70, no. 3, pp. 273–288, 2006.
[9] C. Ji, D. Jiang, and N. Shi, “Analysis of a predator-prey modelwith modified Leslie-Gower and Holling-type II schemes withstochastic perturbation,” Journal of Mathematical Analysisand Applications, vol. 359, no. 2, pp. 482–498, 2009.
[10] Q. Liu, L. Zu, andD. Jiang, “Dynamics of stochastic predator-preymodels with Holling II functional response,” Communications in
00.5
11.5
0
0.5
1
0
0.5
1
1.5
2
P(t) – predatorI(t) – infected prey
S(t
) – su
scep
tible
pre
y
Figure 7: Simulations showing the global stability convergence of the stochastic system (23) around the coexistence equilibrium solution ðS∗, I∗, P∗Þ with different initial values and σ1 = σ2 = σ3 = 0:01
16 Advances in Mathematical Physics

Nonlinear Science and Numerical Simulation, vol. 37, pp. 62–76,2016.
[11] X. Zhang, W. Li, M. Liu, and K. Wang, “Dynamics of a sto-chastic Holling II one-predator two-prey system with jumps,”Physica A, vol. 421, pp. 571–582, 2015.
[12] J. Monod, “La technique de culture continue, théorie et appli-cations,” Annales de l'Institut Pasteur, vol. 79, pp. 390–410,1950.
[13] M. Pitchaimani and R. Rajaji, “Stochastic asymptotic stabilityof Nowak-Maymodel with variable diffusion rates,”Methodol-ogy and Computing in Applied Probability, vol. 18, no. 3,pp. 901–910, 2016.
[14] P. Ghosh, P. Das, and D. Mukherjee, “Persistence and stabilityof a seasonally perturbed three species stochastic model ofsalmonoid aquaculture,” Differential Equations and Dynami-cal Systems, vol. 27, no. 4, pp. 449–465, 2019.
[15] C. Ji, D. Jiang, and X. Li, “Qualitative analysis of a stochasticratio-dependent predator-prey system,” Journal of Computa-tional and Applied Mathematics, vol. 235, no. 5, pp. 1326–1341, 2011.
[16] M. Liu and K. Wang, “Persistence, extinction and globalasymptotical stability of a non-autonomous predator-preymodel with random perturbation,” Applied MathematicalModelling, vol. 36, no. 11, pp. 5344–5353, 2012.
[17] Y. Li and H. Gao, “Existence, uniqueness and global asymp-totic stability of positive solutions of a predator-prey systemwith Holling II functional response with random perturba-tion,” Nonlinear Analysis: Theory, Methods & Applications,vol. 68, no. 6, pp. 1694–1705, 2008.
[18] J. Lv, K. Wang, and D. Chen, “Analysis on a stochastic two-species ratio-dependent predator-prey model,” Methodologyand Computing in Applied Probability, vol. 17, no. 2,pp. 403–418, 2015.
[19] T. Gard, “Persistence in stochastic food web models,” Bulletinof Mathematical Biology, vol. 46, no. 3, pp. 357–370, 1984.
[20] R. M. May, Stability and Complexity in Model Ecosystems,Princeton University Press, 2001.
[21] Q. Liu, D. Jiang, T. Hayat, and A. Alsaedi, “Dynamics of a sto-chastic predator-prey model with stage structure for predatorand Holling type II functional response,” Journal of NonlinearScience, vol. 28, no. 3, pp. 1151–1187, 2018.
[22] M. Gao and D. Jiang, “Stationary distribution of a stochasticfood chain chemostat model with general response functions,”Applied Mathematics Letters, vol. 91, pp. 151–157, 2019.
[23] P. S. Mandal and M. Banerjee, “Stochastic persistence and sta-tionary distribution in a Holling-Tanner type prey-predatormodel,” Physica A, vol. 391, no. 4, pp. 1216–1233, 2012.
[24] D. Mukherjee, “Stability analysis of a stochastic model forprey-predator system with disease in the prey,” NonlinearAnalysis: Modelling and Control, vol. 8, no. 2, pp. 83–92, 2003.
[25] T. V. Ton and A. Yagi, “Dynamics of a stochastic predator-prey model with the Beddington-DeAngelis functionalresponse,” Communications on Stochastic Analysis, vol. 5,no. 2, 2011.
[26] M. Bandyopadhyay and J. Chattopadhyay, “Ratio-dependentpredator-prey model: effect of environmental fluctuation andstability,” Nonlinearity, vol. 18, no. 2, pp. 913–936, 2005.
[27] X. Zhang, Y. Li, and D. Jiang, “Dynamics of a stochastic Hol-ling type II predator–prey model with hyperbolic mortality,”Nonlinear Dynamics, vol. 87, no. 3, pp. 2011–2020, 2017.
[28] L. Arnold, Stochastic Differential Equations: Theory and Appli-cations, Wiley, New York, NY, USA, 1974.
[29] I. Karatzas and S. Shreve, Brownian Motion and StochasticCalculus, Springer Publishing, Berlin, Germany, 2012.
[30] X. Li and X. Mao, “Population dynamical behavior of non-autonomous Lotka-Volterra competitive system with randomperturbation,” Discrete & Continuous Dynamical Systems - A,vol. 24, no. 2, pp. 523–545, 2009.
[31] X. Mao, “Stochastic versions of the LaSalle theorem,” Journalof Differential Equations, vol. 153, no. 1, pp. 175–195, 1999.
[32] J. Chattopadhyay and N. Bairagi, “Pelicans at risk in Salton sea— an eco-epidemiological model,” Ecological Modelling,vol. 136, no. 2-3, pp. 103–112, 2001.
[33] M. A. Aziz-Alaoui and M. D. Okiye, “Boundedness and globalstability for a predator-prey model with modified Leslie-Gower and Holling-type II schemes,” Applied MathematicsLetters, vol. 16, no. 7, pp. 1069–1075, 2003.
[34] D. J. Higham, “An algorithmic introduction to numerical sim-ulation of stochastic differential equations,” SIAM Review,vol. 43, no. 3, pp. 525–546, 2001.
17Advances in Mathematical Physics