Embed Size (px)
Citation preview

Research ArticleA Study of a Diseased Prey-Predator Model with Refuge inPrey and Harvesting from Predator
Ahmed Sami Abdulghafour 1 and Raid Kamel Naji 2
1Scientific Affairs Department Aliraqia University Baghdad Iraq2Department of Mathematics College of Science University of Baghdad Baghdad Iraq
Correspondence should be addressed to Ahmed Sami Abdulghafour alania961gmailcom
Received 4 September 2018 Accepted 14 November 2018 Published 6 December 2018
Academic Editor Oluwole D Makinde
Copyright copy 2018 Ahmed Sami Abdulghafour and Raid Kamel Naji This is an open access article distributed under the CreativeCommons Attribution License which permits unrestricted use distribution and reproduction in any medium provided theoriginal work is properly cited
In this paper a mathematical model of a prey-predator system with infectious disease in the prey population is proposed andstudied It is assumed that there is a constant refuge in prey as a defensive property against predation and harvesting from the preda-tor The proposed mathematical model is consisting of three first-order nonlinear ordinary differential equations which describethe interaction among the healthy prey infected prey and predator The existence uniqueness and boundedness of the systemrsquosolution are investigatedThe systems equilibriumpoints are calculatedwith studying their local and global stabilityThe persistenceconditions of the proposed system are established Finally the obtained analytical results are justified by a numerical simulation
1 Introduction
The interaction between the prey and predator species has along history since Lotka-Volterra model see [1] Similarly theinteraction of the susceptiblendashinfectedndashrecovered populationis an interesting subject of research work since the pioneer-ing work of Kermack and McKendrick [2] The dynamicsof disease within the ecological systems now becomes animportant subject of research In fact Anderson and May[3] were the first who combined these two systems whileChattopadhyay and Arino [4] were the first who used theterm ldquoeco-epidemiologyrdquo for such type of models On onehand several studies of prey-predator dynamics have beendone within the last decades taking into account the effectsof variety of biological factors see for example [5ndash8] and thereferences thereinOn the other hand variety ofmathematicalmodels have been proposed and studied in the field ofepidemiology taking into account different types of incidencerates and disease see for example [9ndash12] and the referencestherein
The existence of disease in the prey population predatorpopulation or both is real situation in the ecological speciesIt has been observed that this type of incidence occurs
through infection by some viral disease bacterial diseaseor parasite disease Many of these studies were focused onthe study of disease in prey population only [13ndash15] Otherresearchers were interested in the study of disease within thepredator population only [16ndash19]There are also some studieswhere both the prey and predator populations are infectedwith the disease [20ndash23]
It is well known that the harvesting of the species isnecessary for the coexistence of the species and hence ittook a lot of interest from the researchers in their proposedecological models Different types of harvesting have beenproposed and studied including constant harvesting densitydependent proportional harvesting and nonlinear harvest-ing [8 24ndash26] The refuge of prey species is also a biologicalfactor necessary for the coexistence of the species and henceit is another factor of great interest as defensive properties ofthe prey against the predation see [8 27 28]
Keeping the above in view in this paper we propose andstudy an eco-epidemiological prey-predator model involvinga prey refuge and harvesting from the predator It is assumedthat the disease exists only in prey and it will not transfer topredator through the feeding process The paper is organizedas follows In Section 2 themathematicalmodel is formulated
HindawiJournal of Applied MathematicsVolume 2018 Article ID 2952791 17 pageshttpsdoiorg10115520182952791
2 Journal of Applied Mathematics
and its dimensionless variables and parameters are deter-mined moreover the existence uniqueness and uniformboundedness of its solution are discussed In Section 3the local stability of all possible equilibrium points andpersistence of the system are studied Section 4 deals withthe global stability analysis of the system using suitableLyapunov functions However Section 5 provides a numericalsimulation of the proposed system for suitable chose ofparameters values Finally Section 6 gives some conclusionsand discussed the obtained results
2 Mathematical Model
In this section a prey-predator system involving infecteddisease in prey is proposed for study It is assumed that thereis a harvesting effort applied on the predator individualsonly Accordingly the following hypotheses are adopted toformulate the mathematical model
(1) The prey population is divided into two compart-ments susceptible with density at time 119879 given by119878(119879) and infected with density at time 119879 representedby 119868(119879) while the predator consists of only onecompartment with density at time119879 denoted by119884(119879)
(2) The prey population grows logistically with intrinsicgrowth rate 119903 gt 0 and carrying capacity 119870 gt 0 itis assumed that the infected cannot reproduce ratherit competes with the susceptible individuals for foodand space
(3) There is a type of protection of prey population fromthe predation by predator represented by a constantpreyrsquos refuge rate 119898 isin (0 1) that leaves (1 minus 119898)119878 ofprey available to be hunted by the predator
(4) The susceptible prey population becomes infectedby contact with the infected prey according to thesimple mass action kinetics with 120573 gt 0 as the rate ofinfection
(5) The predator population consumes both the preypopulations according to modified Holling type IIfunctional response for the predation [29] with halfsaturation constant 119887 gt 0 and maximum attack rates1198861 gt 0 and 1198862 gt 0 for susceptible prey and infectedprey respectively Since there is a vulnerability ofinfected prey relative to susceptible prey the vulner-ability constant rate 120579 gt 0 is used in the functionalresponse Moreover the constants 1198901 isin (0 1) and1198902 isin (0 1) are the conversion rates from susceptibleand infected preys to predator respectively
(6) The disease causes a death in the infected populationrepresented by diseased death rate 1198891 gt 0 while inthe absence of prey the predator decays exponentiallywith natural death rate 1198892 gt 0
(7) Only the predator population is assumed to be har-vested with the Michael-Mentence harvesting func-tion [30] where119864 gt 0 represents hunting effort 119888 gt 0is the catchability coefficient of the predator and 119897119894119894 = 1 2 are suitable positive constants
According to the above set of hypotheses the dynamics of aneco-epidemic prey-predator model with refuge in prey andharvesting in predator can be described in the following setof first-order nonlinear differential equations
119889119878119889119879 = 119903119878 (1 minus 119878 + 119868119870 ) minus 1198861 (1 minus 119898) 119878119884119887 + (1 minus 119898) 119878 + 120579 (1 minus 119898) 119868minus 120573119878119868
119889119868119889119879 = 120573119878119868 minus 1198862 (1 minus 119898) 119868119884119887 + (1 minus 119898) 119878 + 120579 (1 minus 119898) 119868 minus 1198891119868119889119884119889119879 = (11989011198861 (1 minus 119898) 119878 + 11989021198862 (1 minus 119898) 119868119887 + (1 minus 119898) 119878 + 120579 (1 minus 119898) 119868 )119884
minus 1198881198641198841198971119864 + 1198972119884 minus 1198892119884
(1)
where 119878(0) ge 0 119868(0) ge 0 and 119884(0) ge 0Now in order to reduce the number of parameters and
specify the control set of parameters the following dimen-sionless variables and parameters are used
119905 = 119903119879119909 = 119883119870119894 = 119868119870119910 = 1198861119884119903119870 1199081 = 1198871198701199082 = 120573119870119903 1199083 = 11988621198861 1199084 = 1198891119903 1199085 = 11989011198861119903 1199086 = 11989021198862119903 1199087 = 119886111989711198641199031198972119870 1199088 = 1198881198861119864119903211989721198701199089 = 1198892119903
(2)
Journal of Applied Mathematics 3
System (1) reduces to the following dimensionless system
119889119904119889119905= 119904 [1 minus (119904 + 119894) minus (1 minus 119898)1199101199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 1199082119894]= 1199041198911 (119904 119894 119910)119889119894119889119905 = 119894 [1199082119904 minus 1199083 (1 minus 119898)1199101199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 1199084]= 1198941198912 (119904 119894 119910)
119889119910119889119905 = 119910 [ 1199085 (1 minus 119898) 119904 + 1199086 (1 minus 119898) 1198941199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 11990871199088 + 119910 minus 1199089]= 1199101198913 (119904 119894 119910)
(3)
According to the above dimensionless form it is easy toverify that the differential equations are continuous and havecontinuous partial derivatives on the domainR3+ = (119904 119894 119910) isinR3 119904(0) ge 0 119894(0) ge 0 119910(0) ge 0 and hence they areLipschitzian functions Therefore system (3) has a uniquesolution Furthermore the solution of system (3) that initialsin R3+ is uniformly bounded as shown in the followingtheorem
Theorem 1 All solutions of system (3) are uniformly bounded
Proof According to the prey population which is given in thefirst equation of system (3) it is observed that
119889119904119889119905 le 119904 [1 minus 119904] (4)
Then by solving this differential inequality we obtain that119904(119905) le 119904(0)(119890minus119905[1 minus 119904(0)] + 119904(0)) and then for 119905 997888rarr infin wehave 119904(119905) le 1 Now assume that Ω = 119904 + 119894 + 119910 then
119889Ω119889119905 = 119889119904119889119905 + 119889119894119889119905 + 119889119910119889119905119910119894119890119897119889119904997888997888997888997888rarr 119889Ω119889119905 le 2 minus 120583Ω (5)
where 120583 = min1 1199084 1199089 Therefore by solving the lastdifferential inequality we obtain that
Ω (119905) le Ω (0) 119890minus120583119905 minus 2120583 (119890minus120583119905 minus 1) (6)
Hence for 119905 997888rarr infin we get that Ω(119905) le 2120583 Thus all thesolutions of system (3) are uniformly bounded
3 The Local Stability and Persistence
In the following the existence and local stability of all possibleequilibrium points are investigated and then the persistenceconditions of the system are established Obviously system(3) has at most five nonnegative equilibrium points Thevanishing equilibrium point 1198640 = (0 0 0) and the axialequilibrium point 1198641 = (1 0 0) always exist The first planar1198642 = (119904 0 119910) where 119904 represents a unique positive root of thefollowing third-order polynomial equation
11986011199043 + 11986021199042 + 1198603119904 + 1198604 = 0 (7a)
where1198601 = (1199089 minus1199085)11987721198602 = [(1199089 minus1199085)(1199081 minus119877) +11990891199081]1198771198603 = (11990851199088 minus 1199087)1198772 + [11990811199085 minus 211990811199089 minus 11990881199089]119877 + 1199081211990891198604 = minus1199081[11990811199089 + (1199087 + 11990881199089)119877] lt 0 while119910 = (1 minus 119904) (1199081 + 119877119904)119877 (7b)
from now onward 119877 = (1 minus119898) Straightforward computationshows that 1198642 exists uniquely in the interior of positivequadrant of 119904119910 minusplane provided that the following sufficientconditions hold
119904 lt 1 (8a)
1199089 gt 11990851198602 gt 0
119900119903 1199089 gt 11990851198603 lt 0
(8b)
The second planar equilibrium point 1198643 = (119904 0) where119904 = 11990841199082 = 1199082 minus 11990841199082 (1 + 1199082)
(9)
exists uniquely in the interior of positive quadrant of119904119894 minusplane provided that
1199082 gt 1199084 (10)
Finally the coexistence equilibrium point is denoted by 1198644 =(119904lowast 119894lowast 119910lowast) where
119894lowast = 1199083 + 1199084 minus (1199082 + 1199083) 119904lowast1199083 (1 + 1199082) (11a)
119910lowast = (1199082119904lowast minus 1199084) [(11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877) + (1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877) 119904]11990832 (1 + 1199082) 119877 (11b)
4 Journal of Applied Mathematics
while 119904lowast is a unique positive root of the following third-orderpolynomial equation
11986311199043 + 11986321199042 + 1198633119904 + 1198634 = 0 (11c)
Here
1198631 = (1205903 minus (1199082 + 1199083) 1205906)119908212059051198632 = (11990821205904 minus 11990841205905) 1205903 minus 1199082 (1199082 + 1199083) 12059041205906
+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059051205906minus 119908212059051205908
1198633 = [1205901 minus 1205902 (1199082 + 1199083)] minus 119908412059031205904+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059041205906minus 1199084 (1199083 + 1199084) 12059051205906 minus 119908212059041205908 + 119908412059051205908
1198634 = 1205902 (1199083 + 1199084) minus 1205907 minus 1199084 (1199083 + 1199084) 12059041205906+ 119908412059041205908
(12)
with
1205901 = [11990851199088 minus (1199087 + 11990881199089)] 11990833 (1 + 1199082)2 11987721205902 = [11990861199088 minus 120579 (1199087 + 11990881199089)]11990832 (1 + 1199082) 11987721205903 = (1199085 minus 1199089) 1199083 (1 + 1199082) 11987721205904 = [11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877]1205905 = [1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877]1205906 = (1199086 minus 1199089120579) 1198771205907 = 1199081 (1199087 + 11990881199089) 11990833 (1 + 1199082)2 1198771205908 = 119908111990891199083 (1 + 1199082) 119877
(13)
Clearly (11c) has a unique positive root provided that one setof the following sets of conditions holds
1198631 gt 01198632 gt 01198634 lt 0
(14a)
1198631 gt 01198633 lt 01198634 lt 0
(14b)
1198631 lt 01198632 lt 01198634 gt 0
(14c)
1198631 lt 01198633 gt 01198634 gt 0
(14d)
Consequently the coexistence equilibrium point 1198644 =(119904lowast 119894lowast 119910lowast) exists uniquely in the interior ofR3+ provided thatin addition to any one of conditions (14a) (14b) (14c) and(14d) the following sufficient conditions hold
119904lowast lt 1199083 + 1199084(1199082 + 1199083) (15a)
(1199082119904lowast minus 1199084) [1205904 + 1205905119904] gt 0 (15b)
Now in order to study the local stability of these equilibriumpoints the Jacobian matrix of system (3) at the point 119864 =(119904 119894 119910) is computed as follows
119869 (119864) = (119862119894119895)3times3 (16)
where
11986211 = 1198911 (119904 119894 119910) + 119904 (119877211991011987312 minus 1) 11986212 = 119904(120579119877211991011987312 minus (1 + 1199082)) 11986213 = 119904 (minus 1198771198731) 11986221 = 119894(1199082 + 1199083119877211991011987312 ) 11986222 = 1198912 (119904 119894 119910) + 119894 (1205791199083119877211991011987312 ) 11986223 = 119894 (minus11990831198771198731 ) 11986231 = 119910(11990811199085119877 + (1199085120579 minus 1199086) 119877211989411987312 ) 11986232 = 119910(11990811199086119877 + (1199086 minus 1205791199085) 119877211990411987312 ) 11986233 = 119910( 119908711987322) + 1198913 (119904 119894 119910)
(17)
Here1198731 = 1199081 +119877119904 + 120579119877119894 and1198732 = 1199088 +119910 Consequently theJacobian matrix at vanishing equilibrium point 1198640 = (0 0 0)is written as
119869 (1198640) = [[[[[
1 0 00 minus1199084 00 0 minus(11990871199088 + 1199089)
]]]]]
(18)
Journal of Applied Mathematics 5
Obviously the eigenvalues of 119869(1198640) are given by 12058201 = 1 gt 012058202 = minus1199084 lt 0 12058203 = minus(11990871199088 + 1199089) lt 0 Therefore 1198640 is asaddle point
The Jacobian matrix at axial equilibrium point 1198641 =(1 0 0) is written as
119869 (1198641) =[[[[[[[[[
minus1 minus (1 + 1199082) minus 1198771199081 + 1198770 1199082 minus 1199084 00 0 11990851198771199081 + 119877 minus 11990871199088 minus 1199089
]]]]]]]]]
(19)
Then the eigenvalues of 119869(1198641) are given by12058211 = minus1 lt 012058212 =1199082 minus 1199084 and 12058213 = 1199085119877(1199081 + 119877) minus 11990871199088 minus 1199089 Accordinglythe axial point 1198641 is locally asymptotically stable if and only if
1199082 lt 1199084 (20a)
11990851198771199081 + 119877 lt 11990871199088 + 1199089 (20b)
Now the Jacobian matrix at first planar equilibrium point1198642 = (119904 0 119910) can be written
119869 (1198642)
=[[[[[[[[[[[[
1198772119904 119910(1199081 + 119877119904)2 minus 119904 1205791198772119904 119910
(1199081 + 119877119904)2 minus (1 + 1199082) 119904 minus 1198771199041199081 + 1198771199040 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 0
11990811199085119877119910(1199081 + 119877119904)211990811199086119877119910 + (1199086 minus 1205791199085) 1198772119904 119910(1199081 + 119877119904)2
1199087119910(1199088 + 119910)2
]]]]]]]]]]]]
(21)
ClearlyThe eigenvalues of 119869(1198642) can be determined as follows
(1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 minus 120582) (1205822 minus 1198792120582 + 1198632120582) = 0 (22)
where
1198792 = 1198772119904 119910(1199081 + 119877119904)2 minus 119904 + 1199087119910(1199088 + 119910)2
1198632 = ( 1198772119904 119910(1199081 + 119877119904)2 minus 119904)( 1199087119910(1199088 + 119910)2)
+ ( 1198771199041199081 + 119877119904)( 11990811199085119877119910(1199081 + 119877119904)2)
(23)
Therefore the eigenvalues of 119869(1198642) are easily determined by
12058221 = 11987922 minus 12radic11987922 minus 4119863212058222 = 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 119908412058223 = 11987922 + 12radic11987922 minus 41198632
(24)
Straightforward computation shows that these eigenvalueshave negative real parts and hence the first planar equilibriumpoint 1198642 is locally asymptotically stable if and only if thefollowing sufficient conditions hold
1199082119904 lt 11990831198771199101199081 + 119877119904 + 1199084 (25a)
1198772119904 119910(1199081 + 119877119904)2 +
1199087119910(1199088 + 119910)2 lt 119904 (25b)
11990871198772119910 (1199081 + 119877119904) + 119908111990851198772 (1199088 + 119910)2gt 1199087 (1199081 + 119877119904)3 (25c)
Similarly the Jacobian matrix at second planar equilibriumpoint 1198643 = (119904 0) can be written
119869 (1198643)
=[[[[[[[[[[[[
minus119904 minus119904 (1 + 1199082) minus 1198771199041199081 + 119877119904 + 120579119877
1199082 0 minus 11990831198771199081 + 119877119904 + 1205791198770 0 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089
]]]]]]]]]]]]
(26)
Then the eigenvalues of 119869(1198643) are given by
( 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 minus 120582) (1205822 minus 1198793120582 + 1198633)
= 0(27)
where
1198793 = minus119904 lt 01198633 = 1199082 (1 + 1199082) 119904 gt 0 (28)
Clearly the first two eigenvalues resulting from second termin (27) have negative real parts while the third eigenvalues inthe 119910 minusdirection which are written as
12058233 = 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 (29)
have negative real part and then the second planar equilib-rium point is locally asymptotically stable if and only if
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 lt11990871199088 + 1199089 (30)
Finally the Jacobian matrix at coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) can be written in the form
119869 (1198644) = [119886119894119895] 119894 119895 = 1 2 3 (31)
6 Journal of Applied Mathematics
where
11988611 = 1198772119904lowast119910lowast minus 119873lowast1 2119904lowast119873lowast1 2
11988612 = 1205791198772119904lowast119910lowast minus (1 + 1199082)119873lowast1 2119904lowast119873lowast1 2
11988613 = minus119877119904lowast119873lowast1 lt 0
11988621 = 1199082119894lowast + 11990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988622 = 12057911990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988623 = minus1199083119877119894lowast119873lowast1 lt 0
11988631 = 11990811199085119877119910lowast + (1199085120579 minus 1199086) 1198772119894lowast119910lowast119873lowast1 2
11988632 = 11990811199086119877119910lowast + (1199086 minus 1205791199085) 1198772119904lowast119910lowast119873lowast1 2
11988633 = 1199087119910lowast119873lowast2 2 gt 0
(32)
Here 119873lowast1 = 1199081 + 119877119904lowast + 120579119877119894lowast and 119873lowast2 = 1199088 + 119910lowast Thecharacteristic equation of 119869(1198644) can be written in the form
1205823 + 11986011205822 + 1198602120582 + 1198603 = 0 (33)
where
1198601 = minus (11988611 + 11988622 + 11988633)1198602 = 1198861111988622 minus 1198861211988621 + 1198861111988633 minus 1198861311988631 + 1198862211988633
minus 11988623119886321198603 = 11988633 (1198861211988621 minus 1198861111988622) minus 11988623 (1198861211988631 minus 1198861111988632)
minus 11988613 (1198862111988632 minus 1198862211988631)
(34)
while
= 11986011198602 minus 1198603= minus (11988611 + 11988622) [1198861111988622 minus 1198861211988621] minus 2119886111198862211988633
minus (11988611 + 11988633) [1198861111988633 minus 1198861311988631]minus (11988622 + 11988633) [1198862311988632 minus 1198862211988633]
(35)
Therefore straightforward computation shows that
1198601 = minus 1119873lowast1 2119873lowast2 2 [119873lowast2
2119904lowast (1198772119910lowast minus 119873lowast1 2)+ 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowast]
1198603 = 1199087119904lowast119894lowast119910lowast119873lowast1 2119873lowast2 2 [(1199082 + 1199083) 1205791198772119910lowast minus (1 + 1199082)sdot (1199082119873lowast1 2 + 11990831198772119910lowast)] + 1199083119877119904lowast119894lowast119910lowast119873lowast1 5 [(1199085120579 minus 1199086)sdot 1198772119873lowast1 [119877119910lowast minus 119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)]+ 1199081 (1199086 minus 1199085 (1 + 1199082)) 119877119873lowast1 2]+ 1198772119904lowast2119910lowast
119873lowast1 4 [119908111990821199086119873lowast1+ 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)minus 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)]
(36)
while
= minus119872lowast1 +119872lowast2 +119872lowast3 minus119872lowast4 (37)
with
119872lowast1 = 1119873lowast1 6 [119873lowast1
2119904lowast119894lowast119910lowast (1198772119904lowast119910lowast minus 119873lowast1 2119904lowast+ 11990831205791198772119894lowast119910lowast) ((1 + 1199082) [1199082119873lowast1 2 + 11990831198772119910lowast]minus (1199082 + 1199083) 1205791198772119910lowast)]
119872lowast2 = 119908311990871205791198772119904lowast119894lowast119910lowast2119873lowast1 4119873lowast2 2 [119873lowast1 2 minus 1198772119910lowast]119872lowast3 = 119904lowast119910lowast
119873lowast1 6119873lowast2 4 [(minus1198772119873lowast2 2119904lowast119910lowast + 119873lowast1 2119873lowast2 2119904lowast
minus 1199087119873lowast1 2119910lowast) (11990871198772119873lowast1 2119910lowast minus 1199087119873lowast1 4+ 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowast)]
119872lowast4 = 11990831198772119894lowast119910lowast2119873lowast1 6119873lowast2 2 [(11990831205791198772119873lowast2 2119894lowast + 1199087119873lowast2 2)sdot (11990811199086119873lowast1 + (1199086 minus 1205791199085) 119877119873lowast1 119904lowast + 1205791199087119910lowast)]
(38)
Keeping the above in view it is well known that from Routh-Hurwitz criterion (33) has three roots with negative real partsprovided that 1198601 gt 0 1198603 gt 0 and gt 0 Consequently thefollowing theorem can be proved easily
Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
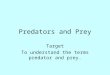
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
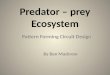
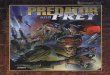
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Journal of Applied Mathematics
and its dimensionless variables and parameters are deter-mined moreover the existence uniqueness and uniformboundedness of its solution are discussed In Section 3the local stability of all possible equilibrium points andpersistence of the system are studied Section 4 deals withthe global stability analysis of the system using suitableLyapunov functions However Section 5 provides a numericalsimulation of the proposed system for suitable chose ofparameters values Finally Section 6 gives some conclusionsand discussed the obtained results
2 Mathematical Model
In this section a prey-predator system involving infecteddisease in prey is proposed for study It is assumed that thereis a harvesting effort applied on the predator individualsonly Accordingly the following hypotheses are adopted toformulate the mathematical model
(1) The prey population is divided into two compart-ments susceptible with density at time 119879 given by119878(119879) and infected with density at time 119879 representedby 119868(119879) while the predator consists of only onecompartment with density at time119879 denoted by119884(119879)
(2) The prey population grows logistically with intrinsicgrowth rate 119903 gt 0 and carrying capacity 119870 gt 0 itis assumed that the infected cannot reproduce ratherit competes with the susceptible individuals for foodand space
(3) There is a type of protection of prey population fromthe predation by predator represented by a constantpreyrsquos refuge rate 119898 isin (0 1) that leaves (1 minus 119898)119878 ofprey available to be hunted by the predator
(4) The susceptible prey population becomes infectedby contact with the infected prey according to thesimple mass action kinetics with 120573 gt 0 as the rate ofinfection
(5) The predator population consumes both the preypopulations according to modified Holling type IIfunctional response for the predation [29] with halfsaturation constant 119887 gt 0 and maximum attack rates1198861 gt 0 and 1198862 gt 0 for susceptible prey and infectedprey respectively Since there is a vulnerability ofinfected prey relative to susceptible prey the vulner-ability constant rate 120579 gt 0 is used in the functionalresponse Moreover the constants 1198901 isin (0 1) and1198902 isin (0 1) are the conversion rates from susceptibleand infected preys to predator respectively
(6) The disease causes a death in the infected populationrepresented by diseased death rate 1198891 gt 0 while inthe absence of prey the predator decays exponentiallywith natural death rate 1198892 gt 0
(7) Only the predator population is assumed to be har-vested with the Michael-Mentence harvesting func-tion [30] where119864 gt 0 represents hunting effort 119888 gt 0is the catchability coefficient of the predator and 119897119894119894 = 1 2 are suitable positive constants
According to the above set of hypotheses the dynamics of aneco-epidemic prey-predator model with refuge in prey andharvesting in predator can be described in the following setof first-order nonlinear differential equations
119889119878119889119879 = 119903119878 (1 minus 119878 + 119868119870 ) minus 1198861 (1 minus 119898) 119878119884119887 + (1 minus 119898) 119878 + 120579 (1 minus 119898) 119868minus 120573119878119868
119889119868119889119879 = 120573119878119868 minus 1198862 (1 minus 119898) 119868119884119887 + (1 minus 119898) 119878 + 120579 (1 minus 119898) 119868 minus 1198891119868119889119884119889119879 = (11989011198861 (1 minus 119898) 119878 + 11989021198862 (1 minus 119898) 119868119887 + (1 minus 119898) 119878 + 120579 (1 minus 119898) 119868 )119884
minus 1198881198641198841198971119864 + 1198972119884 minus 1198892119884
(1)
where 119878(0) ge 0 119868(0) ge 0 and 119884(0) ge 0Now in order to reduce the number of parameters and
specify the control set of parameters the following dimen-sionless variables and parameters are used
119905 = 119903119879119909 = 119883119870119894 = 119868119870119910 = 1198861119884119903119870 1199081 = 1198871198701199082 = 120573119870119903 1199083 = 11988621198861 1199084 = 1198891119903 1199085 = 11989011198861119903 1199086 = 11989021198862119903 1199087 = 119886111989711198641199031198972119870 1199088 = 1198881198861119864119903211989721198701199089 = 1198892119903
(2)
Journal of Applied Mathematics 3
System (1) reduces to the following dimensionless system
119889119904119889119905= 119904 [1 minus (119904 + 119894) minus (1 minus 119898)1199101199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 1199082119894]= 1199041198911 (119904 119894 119910)119889119894119889119905 = 119894 [1199082119904 minus 1199083 (1 minus 119898)1199101199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 1199084]= 1198941198912 (119904 119894 119910)
119889119910119889119905 = 119910 [ 1199085 (1 minus 119898) 119904 + 1199086 (1 minus 119898) 1198941199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 11990871199088 + 119910 minus 1199089]= 1199101198913 (119904 119894 119910)
(3)
According to the above dimensionless form it is easy toverify that the differential equations are continuous and havecontinuous partial derivatives on the domainR3+ = (119904 119894 119910) isinR3 119904(0) ge 0 119894(0) ge 0 119910(0) ge 0 and hence they areLipschitzian functions Therefore system (3) has a uniquesolution Furthermore the solution of system (3) that initialsin R3+ is uniformly bounded as shown in the followingtheorem
Theorem 1 All solutions of system (3) are uniformly bounded
Proof According to the prey population which is given in thefirst equation of system (3) it is observed that
119889119904119889119905 le 119904 [1 minus 119904] (4)
Then by solving this differential inequality we obtain that119904(119905) le 119904(0)(119890minus119905[1 minus 119904(0)] + 119904(0)) and then for 119905 997888rarr infin wehave 119904(119905) le 1 Now assume that Ω = 119904 + 119894 + 119910 then
119889Ω119889119905 = 119889119904119889119905 + 119889119894119889119905 + 119889119910119889119905119910119894119890119897119889119904997888997888997888997888rarr 119889Ω119889119905 le 2 minus 120583Ω (5)
where 120583 = min1 1199084 1199089 Therefore by solving the lastdifferential inequality we obtain that
Ω (119905) le Ω (0) 119890minus120583119905 minus 2120583 (119890minus120583119905 minus 1) (6)
Hence for 119905 997888rarr infin we get that Ω(119905) le 2120583 Thus all thesolutions of system (3) are uniformly bounded
3 The Local Stability and Persistence
In the following the existence and local stability of all possibleequilibrium points are investigated and then the persistenceconditions of the system are established Obviously system(3) has at most five nonnegative equilibrium points Thevanishing equilibrium point 1198640 = (0 0 0) and the axialequilibrium point 1198641 = (1 0 0) always exist The first planar1198642 = (119904 0 119910) where 119904 represents a unique positive root of thefollowing third-order polynomial equation
11986011199043 + 11986021199042 + 1198603119904 + 1198604 = 0 (7a)
where1198601 = (1199089 minus1199085)11987721198602 = [(1199089 minus1199085)(1199081 minus119877) +11990891199081]1198771198603 = (11990851199088 minus 1199087)1198772 + [11990811199085 minus 211990811199089 minus 11990881199089]119877 + 1199081211990891198604 = minus1199081[11990811199089 + (1199087 + 11990881199089)119877] lt 0 while119910 = (1 minus 119904) (1199081 + 119877119904)119877 (7b)
from now onward 119877 = (1 minus119898) Straightforward computationshows that 1198642 exists uniquely in the interior of positivequadrant of 119904119910 minusplane provided that the following sufficientconditions hold
119904 lt 1 (8a)
1199089 gt 11990851198602 gt 0
119900119903 1199089 gt 11990851198603 lt 0
(8b)
The second planar equilibrium point 1198643 = (119904 0) where119904 = 11990841199082 = 1199082 minus 11990841199082 (1 + 1199082)
(9)
exists uniquely in the interior of positive quadrant of119904119894 minusplane provided that
1199082 gt 1199084 (10)
Finally the coexistence equilibrium point is denoted by 1198644 =(119904lowast 119894lowast 119910lowast) where
119894lowast = 1199083 + 1199084 minus (1199082 + 1199083) 119904lowast1199083 (1 + 1199082) (11a)
119910lowast = (1199082119904lowast minus 1199084) [(11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877) + (1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877) 119904]11990832 (1 + 1199082) 119877 (11b)
4 Journal of Applied Mathematics
while 119904lowast is a unique positive root of the following third-orderpolynomial equation
11986311199043 + 11986321199042 + 1198633119904 + 1198634 = 0 (11c)
Here
1198631 = (1205903 minus (1199082 + 1199083) 1205906)119908212059051198632 = (11990821205904 minus 11990841205905) 1205903 minus 1199082 (1199082 + 1199083) 12059041205906
+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059051205906minus 119908212059051205908
1198633 = [1205901 minus 1205902 (1199082 + 1199083)] minus 119908412059031205904+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059041205906minus 1199084 (1199083 + 1199084) 12059051205906 minus 119908212059041205908 + 119908412059051205908
1198634 = 1205902 (1199083 + 1199084) minus 1205907 minus 1199084 (1199083 + 1199084) 12059041205906+ 119908412059041205908
(12)
with
1205901 = [11990851199088 minus (1199087 + 11990881199089)] 11990833 (1 + 1199082)2 11987721205902 = [11990861199088 minus 120579 (1199087 + 11990881199089)]11990832 (1 + 1199082) 11987721205903 = (1199085 minus 1199089) 1199083 (1 + 1199082) 11987721205904 = [11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877]1205905 = [1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877]1205906 = (1199086 minus 1199089120579) 1198771205907 = 1199081 (1199087 + 11990881199089) 11990833 (1 + 1199082)2 1198771205908 = 119908111990891199083 (1 + 1199082) 119877
(13)
Clearly (11c) has a unique positive root provided that one setof the following sets of conditions holds
1198631 gt 01198632 gt 01198634 lt 0
(14a)
1198631 gt 01198633 lt 01198634 lt 0
(14b)
1198631 lt 01198632 lt 01198634 gt 0
(14c)
1198631 lt 01198633 gt 01198634 gt 0
(14d)
Consequently the coexistence equilibrium point 1198644 =(119904lowast 119894lowast 119910lowast) exists uniquely in the interior ofR3+ provided thatin addition to any one of conditions (14a) (14b) (14c) and(14d) the following sufficient conditions hold
119904lowast lt 1199083 + 1199084(1199082 + 1199083) (15a)
(1199082119904lowast minus 1199084) [1205904 + 1205905119904] gt 0 (15b)
Now in order to study the local stability of these equilibriumpoints the Jacobian matrix of system (3) at the point 119864 =(119904 119894 119910) is computed as follows
119869 (119864) = (119862119894119895)3times3 (16)
where
11986211 = 1198911 (119904 119894 119910) + 119904 (119877211991011987312 minus 1) 11986212 = 119904(120579119877211991011987312 minus (1 + 1199082)) 11986213 = 119904 (minus 1198771198731) 11986221 = 119894(1199082 + 1199083119877211991011987312 ) 11986222 = 1198912 (119904 119894 119910) + 119894 (1205791199083119877211991011987312 ) 11986223 = 119894 (minus11990831198771198731 ) 11986231 = 119910(11990811199085119877 + (1199085120579 minus 1199086) 119877211989411987312 ) 11986232 = 119910(11990811199086119877 + (1199086 minus 1205791199085) 119877211990411987312 ) 11986233 = 119910( 119908711987322) + 1198913 (119904 119894 119910)
(17)
Here1198731 = 1199081 +119877119904 + 120579119877119894 and1198732 = 1199088 +119910 Consequently theJacobian matrix at vanishing equilibrium point 1198640 = (0 0 0)is written as
119869 (1198640) = [[[[[
1 0 00 minus1199084 00 0 minus(11990871199088 + 1199089)
]]]]]
(18)
Journal of Applied Mathematics 5
Obviously the eigenvalues of 119869(1198640) are given by 12058201 = 1 gt 012058202 = minus1199084 lt 0 12058203 = minus(11990871199088 + 1199089) lt 0 Therefore 1198640 is asaddle point
The Jacobian matrix at axial equilibrium point 1198641 =(1 0 0) is written as
119869 (1198641) =[[[[[[[[[
minus1 minus (1 + 1199082) minus 1198771199081 + 1198770 1199082 minus 1199084 00 0 11990851198771199081 + 119877 minus 11990871199088 minus 1199089
]]]]]]]]]
(19)
Then the eigenvalues of 119869(1198641) are given by12058211 = minus1 lt 012058212 =1199082 minus 1199084 and 12058213 = 1199085119877(1199081 + 119877) minus 11990871199088 minus 1199089 Accordinglythe axial point 1198641 is locally asymptotically stable if and only if
1199082 lt 1199084 (20a)
11990851198771199081 + 119877 lt 11990871199088 + 1199089 (20b)
Now the Jacobian matrix at first planar equilibrium point1198642 = (119904 0 119910) can be written
119869 (1198642)
=[[[[[[[[[[[[
1198772119904 119910(1199081 + 119877119904)2 minus 119904 1205791198772119904 119910
(1199081 + 119877119904)2 minus (1 + 1199082) 119904 minus 1198771199041199081 + 1198771199040 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 0
11990811199085119877119910(1199081 + 119877119904)211990811199086119877119910 + (1199086 minus 1205791199085) 1198772119904 119910(1199081 + 119877119904)2
1199087119910(1199088 + 119910)2
]]]]]]]]]]]]
(21)
ClearlyThe eigenvalues of 119869(1198642) can be determined as follows
(1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 minus 120582) (1205822 minus 1198792120582 + 1198632120582) = 0 (22)
where
1198792 = 1198772119904 119910(1199081 + 119877119904)2 minus 119904 + 1199087119910(1199088 + 119910)2
1198632 = ( 1198772119904 119910(1199081 + 119877119904)2 minus 119904)( 1199087119910(1199088 + 119910)2)
+ ( 1198771199041199081 + 119877119904)( 11990811199085119877119910(1199081 + 119877119904)2)
(23)
Therefore the eigenvalues of 119869(1198642) are easily determined by
12058221 = 11987922 minus 12radic11987922 minus 4119863212058222 = 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 119908412058223 = 11987922 + 12radic11987922 minus 41198632
(24)
Straightforward computation shows that these eigenvalueshave negative real parts and hence the first planar equilibriumpoint 1198642 is locally asymptotically stable if and only if thefollowing sufficient conditions hold
1199082119904 lt 11990831198771199101199081 + 119877119904 + 1199084 (25a)
1198772119904 119910(1199081 + 119877119904)2 +
1199087119910(1199088 + 119910)2 lt 119904 (25b)
11990871198772119910 (1199081 + 119877119904) + 119908111990851198772 (1199088 + 119910)2gt 1199087 (1199081 + 119877119904)3 (25c)
Similarly the Jacobian matrix at second planar equilibriumpoint 1198643 = (119904 0) can be written
119869 (1198643)
=[[[[[[[[[[[[
minus119904 minus119904 (1 + 1199082) minus 1198771199041199081 + 119877119904 + 120579119877
1199082 0 minus 11990831198771199081 + 119877119904 + 1205791198770 0 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089
]]]]]]]]]]]]
(26)
Then the eigenvalues of 119869(1198643) are given by
( 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 minus 120582) (1205822 minus 1198793120582 + 1198633)
= 0(27)
where
1198793 = minus119904 lt 01198633 = 1199082 (1 + 1199082) 119904 gt 0 (28)
Clearly the first two eigenvalues resulting from second termin (27) have negative real parts while the third eigenvalues inthe 119910 minusdirection which are written as
12058233 = 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 (29)
have negative real part and then the second planar equilib-rium point is locally asymptotically stable if and only if
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 lt11990871199088 + 1199089 (30)
Finally the Jacobian matrix at coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) can be written in the form
119869 (1198644) = [119886119894119895] 119894 119895 = 1 2 3 (31)
6 Journal of Applied Mathematics
where
11988611 = 1198772119904lowast119910lowast minus 119873lowast1 2119904lowast119873lowast1 2
11988612 = 1205791198772119904lowast119910lowast minus (1 + 1199082)119873lowast1 2119904lowast119873lowast1 2
11988613 = minus119877119904lowast119873lowast1 lt 0
11988621 = 1199082119894lowast + 11990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988622 = 12057911990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988623 = minus1199083119877119894lowast119873lowast1 lt 0
11988631 = 11990811199085119877119910lowast + (1199085120579 minus 1199086) 1198772119894lowast119910lowast119873lowast1 2
11988632 = 11990811199086119877119910lowast + (1199086 minus 1205791199085) 1198772119904lowast119910lowast119873lowast1 2
11988633 = 1199087119910lowast119873lowast2 2 gt 0
(32)
Here 119873lowast1 = 1199081 + 119877119904lowast + 120579119877119894lowast and 119873lowast2 = 1199088 + 119910lowast Thecharacteristic equation of 119869(1198644) can be written in the form
1205823 + 11986011205822 + 1198602120582 + 1198603 = 0 (33)
where
1198601 = minus (11988611 + 11988622 + 11988633)1198602 = 1198861111988622 minus 1198861211988621 + 1198861111988633 minus 1198861311988631 + 1198862211988633
minus 11988623119886321198603 = 11988633 (1198861211988621 minus 1198861111988622) minus 11988623 (1198861211988631 minus 1198861111988632)
minus 11988613 (1198862111988632 minus 1198862211988631)
(34)
while
= 11986011198602 minus 1198603= minus (11988611 + 11988622) [1198861111988622 minus 1198861211988621] minus 2119886111198862211988633
minus (11988611 + 11988633) [1198861111988633 minus 1198861311988631]minus (11988622 + 11988633) [1198862311988632 minus 1198862211988633]
(35)
Therefore straightforward computation shows that
1198601 = minus 1119873lowast1 2119873lowast2 2 [119873lowast2
2119904lowast (1198772119910lowast minus 119873lowast1 2)+ 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowast]
1198603 = 1199087119904lowast119894lowast119910lowast119873lowast1 2119873lowast2 2 [(1199082 + 1199083) 1205791198772119910lowast minus (1 + 1199082)sdot (1199082119873lowast1 2 + 11990831198772119910lowast)] + 1199083119877119904lowast119894lowast119910lowast119873lowast1 5 [(1199085120579 minus 1199086)sdot 1198772119873lowast1 [119877119910lowast minus 119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)]+ 1199081 (1199086 minus 1199085 (1 + 1199082)) 119877119873lowast1 2]+ 1198772119904lowast2119910lowast
119873lowast1 4 [119908111990821199086119873lowast1+ 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)minus 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)]
(36)
while
= minus119872lowast1 +119872lowast2 +119872lowast3 minus119872lowast4 (37)
with
119872lowast1 = 1119873lowast1 6 [119873lowast1
2119904lowast119894lowast119910lowast (1198772119904lowast119910lowast minus 119873lowast1 2119904lowast+ 11990831205791198772119894lowast119910lowast) ((1 + 1199082) [1199082119873lowast1 2 + 11990831198772119910lowast]minus (1199082 + 1199083) 1205791198772119910lowast)]
119872lowast2 = 119908311990871205791198772119904lowast119894lowast119910lowast2119873lowast1 4119873lowast2 2 [119873lowast1 2 minus 1198772119910lowast]119872lowast3 = 119904lowast119910lowast
119873lowast1 6119873lowast2 4 [(minus1198772119873lowast2 2119904lowast119910lowast + 119873lowast1 2119873lowast2 2119904lowast
minus 1199087119873lowast1 2119910lowast) (11990871198772119873lowast1 2119910lowast minus 1199087119873lowast1 4+ 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowast)]
119872lowast4 = 11990831198772119894lowast119910lowast2119873lowast1 6119873lowast2 2 [(11990831205791198772119873lowast2 2119894lowast + 1199087119873lowast2 2)sdot (11990811199086119873lowast1 + (1199086 minus 1205791199085) 119877119873lowast1 119904lowast + 1205791199087119910lowast)]
(38)
Keeping the above in view it is well known that from Routh-Hurwitz criterion (33) has three roots with negative real partsprovided that 1198601 gt 0 1198603 gt 0 and gt 0 Consequently thefollowing theorem can be proved easily
Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 3
System (1) reduces to the following dimensionless system
119889119904119889119905= 119904 [1 minus (119904 + 119894) minus (1 minus 119898)1199101199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 1199082119894]= 1199041198911 (119904 119894 119910)119889119894119889119905 = 119894 [1199082119904 minus 1199083 (1 minus 119898)1199101199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 1199084]= 1198941198912 (119904 119894 119910)
119889119910119889119905 = 119910 [ 1199085 (1 minus 119898) 119904 + 1199086 (1 minus 119898) 1198941199081 + (1 minus 119898) 119904 + 120579 (1 minus 119898) 119894 minus 11990871199088 + 119910 minus 1199089]= 1199101198913 (119904 119894 119910)
(3)
According to the above dimensionless form it is easy toverify that the differential equations are continuous and havecontinuous partial derivatives on the domainR3+ = (119904 119894 119910) isinR3 119904(0) ge 0 119894(0) ge 0 119910(0) ge 0 and hence they areLipschitzian functions Therefore system (3) has a uniquesolution Furthermore the solution of system (3) that initialsin R3+ is uniformly bounded as shown in the followingtheorem
Theorem 1 All solutions of system (3) are uniformly bounded
Proof According to the prey population which is given in thefirst equation of system (3) it is observed that
119889119904119889119905 le 119904 [1 minus 119904] (4)
Then by solving this differential inequality we obtain that119904(119905) le 119904(0)(119890minus119905[1 minus 119904(0)] + 119904(0)) and then for 119905 997888rarr infin wehave 119904(119905) le 1 Now assume that Ω = 119904 + 119894 + 119910 then
119889Ω119889119905 = 119889119904119889119905 + 119889119894119889119905 + 119889119910119889119905119910119894119890119897119889119904997888997888997888997888rarr 119889Ω119889119905 le 2 minus 120583Ω (5)
where 120583 = min1 1199084 1199089 Therefore by solving the lastdifferential inequality we obtain that
Ω (119905) le Ω (0) 119890minus120583119905 minus 2120583 (119890minus120583119905 minus 1) (6)
Hence for 119905 997888rarr infin we get that Ω(119905) le 2120583 Thus all thesolutions of system (3) are uniformly bounded
3 The Local Stability and Persistence
In the following the existence and local stability of all possibleequilibrium points are investigated and then the persistenceconditions of the system are established Obviously system(3) has at most five nonnegative equilibrium points Thevanishing equilibrium point 1198640 = (0 0 0) and the axialequilibrium point 1198641 = (1 0 0) always exist The first planar1198642 = (119904 0 119910) where 119904 represents a unique positive root of thefollowing third-order polynomial equation
11986011199043 + 11986021199042 + 1198603119904 + 1198604 = 0 (7a)
where1198601 = (1199089 minus1199085)11987721198602 = [(1199089 minus1199085)(1199081 minus119877) +11990891199081]1198771198603 = (11990851199088 minus 1199087)1198772 + [11990811199085 minus 211990811199089 minus 11990881199089]119877 + 1199081211990891198604 = minus1199081[11990811199089 + (1199087 + 11990881199089)119877] lt 0 while119910 = (1 minus 119904) (1199081 + 119877119904)119877 (7b)
from now onward 119877 = (1 minus119898) Straightforward computationshows that 1198642 exists uniquely in the interior of positivequadrant of 119904119910 minusplane provided that the following sufficientconditions hold
119904 lt 1 (8a)
1199089 gt 11990851198602 gt 0
119900119903 1199089 gt 11990851198603 lt 0
(8b)
The second planar equilibrium point 1198643 = (119904 0) where119904 = 11990841199082 = 1199082 minus 11990841199082 (1 + 1199082)
(9)
exists uniquely in the interior of positive quadrant of119904119894 minusplane provided that
1199082 gt 1199084 (10)
Finally the coexistence equilibrium point is denoted by 1198644 =(119904lowast 119894lowast 119910lowast) where
119894lowast = 1199083 + 1199084 minus (1199082 + 1199083) 119904lowast1199083 (1 + 1199082) (11a)
119910lowast = (1199082119904lowast minus 1199084) [(11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877) + (1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877) 119904]11990832 (1 + 1199082) 119877 (11b)
4 Journal of Applied Mathematics
while 119904lowast is a unique positive root of the following third-orderpolynomial equation
11986311199043 + 11986321199042 + 1198633119904 + 1198634 = 0 (11c)
Here
1198631 = (1205903 minus (1199082 + 1199083) 1205906)119908212059051198632 = (11990821205904 minus 11990841205905) 1205903 minus 1199082 (1199082 + 1199083) 12059041205906
+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059051205906minus 119908212059051205908
1198633 = [1205901 minus 1205902 (1199082 + 1199083)] minus 119908412059031205904+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059041205906minus 1199084 (1199083 + 1199084) 12059051205906 minus 119908212059041205908 + 119908412059051205908
1198634 = 1205902 (1199083 + 1199084) minus 1205907 minus 1199084 (1199083 + 1199084) 12059041205906+ 119908412059041205908
(12)
with
1205901 = [11990851199088 minus (1199087 + 11990881199089)] 11990833 (1 + 1199082)2 11987721205902 = [11990861199088 minus 120579 (1199087 + 11990881199089)]11990832 (1 + 1199082) 11987721205903 = (1199085 minus 1199089) 1199083 (1 + 1199082) 11987721205904 = [11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877]1205905 = [1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877]1205906 = (1199086 minus 1199089120579) 1198771205907 = 1199081 (1199087 + 11990881199089) 11990833 (1 + 1199082)2 1198771205908 = 119908111990891199083 (1 + 1199082) 119877
(13)
Clearly (11c) has a unique positive root provided that one setof the following sets of conditions holds
1198631 gt 01198632 gt 01198634 lt 0
(14a)
1198631 gt 01198633 lt 01198634 lt 0
(14b)
1198631 lt 01198632 lt 01198634 gt 0
(14c)
1198631 lt 01198633 gt 01198634 gt 0
(14d)
Consequently the coexistence equilibrium point 1198644 =(119904lowast 119894lowast 119910lowast) exists uniquely in the interior ofR3+ provided thatin addition to any one of conditions (14a) (14b) (14c) and(14d) the following sufficient conditions hold
119904lowast lt 1199083 + 1199084(1199082 + 1199083) (15a)
(1199082119904lowast minus 1199084) [1205904 + 1205905119904] gt 0 (15b)
Now in order to study the local stability of these equilibriumpoints the Jacobian matrix of system (3) at the point 119864 =(119904 119894 119910) is computed as follows
119869 (119864) = (119862119894119895)3times3 (16)
where
11986211 = 1198911 (119904 119894 119910) + 119904 (119877211991011987312 minus 1) 11986212 = 119904(120579119877211991011987312 minus (1 + 1199082)) 11986213 = 119904 (minus 1198771198731) 11986221 = 119894(1199082 + 1199083119877211991011987312 ) 11986222 = 1198912 (119904 119894 119910) + 119894 (1205791199083119877211991011987312 ) 11986223 = 119894 (minus11990831198771198731 ) 11986231 = 119910(11990811199085119877 + (1199085120579 minus 1199086) 119877211989411987312 ) 11986232 = 119910(11990811199086119877 + (1199086 minus 1205791199085) 119877211990411987312 ) 11986233 = 119910( 119908711987322) + 1198913 (119904 119894 119910)
(17)
Here1198731 = 1199081 +119877119904 + 120579119877119894 and1198732 = 1199088 +119910 Consequently theJacobian matrix at vanishing equilibrium point 1198640 = (0 0 0)is written as
119869 (1198640) = [[[[[
1 0 00 minus1199084 00 0 minus(11990871199088 + 1199089)
]]]]]
(18)
Journal of Applied Mathematics 5
Obviously the eigenvalues of 119869(1198640) are given by 12058201 = 1 gt 012058202 = minus1199084 lt 0 12058203 = minus(11990871199088 + 1199089) lt 0 Therefore 1198640 is asaddle point
The Jacobian matrix at axial equilibrium point 1198641 =(1 0 0) is written as
119869 (1198641) =[[[[[[[[[
minus1 minus (1 + 1199082) minus 1198771199081 + 1198770 1199082 minus 1199084 00 0 11990851198771199081 + 119877 minus 11990871199088 minus 1199089
]]]]]]]]]
(19)
Then the eigenvalues of 119869(1198641) are given by12058211 = minus1 lt 012058212 =1199082 minus 1199084 and 12058213 = 1199085119877(1199081 + 119877) minus 11990871199088 minus 1199089 Accordinglythe axial point 1198641 is locally asymptotically stable if and only if
1199082 lt 1199084 (20a)
11990851198771199081 + 119877 lt 11990871199088 + 1199089 (20b)
Now the Jacobian matrix at first planar equilibrium point1198642 = (119904 0 119910) can be written
119869 (1198642)
=[[[[[[[[[[[[
1198772119904 119910(1199081 + 119877119904)2 minus 119904 1205791198772119904 119910
(1199081 + 119877119904)2 minus (1 + 1199082) 119904 minus 1198771199041199081 + 1198771199040 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 0
11990811199085119877119910(1199081 + 119877119904)211990811199086119877119910 + (1199086 minus 1205791199085) 1198772119904 119910(1199081 + 119877119904)2
1199087119910(1199088 + 119910)2
]]]]]]]]]]]]
(21)
ClearlyThe eigenvalues of 119869(1198642) can be determined as follows
(1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 minus 120582) (1205822 minus 1198792120582 + 1198632120582) = 0 (22)
where
1198792 = 1198772119904 119910(1199081 + 119877119904)2 minus 119904 + 1199087119910(1199088 + 119910)2
1198632 = ( 1198772119904 119910(1199081 + 119877119904)2 minus 119904)( 1199087119910(1199088 + 119910)2)
+ ( 1198771199041199081 + 119877119904)( 11990811199085119877119910(1199081 + 119877119904)2)
(23)
Therefore the eigenvalues of 119869(1198642) are easily determined by
12058221 = 11987922 minus 12radic11987922 minus 4119863212058222 = 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 119908412058223 = 11987922 + 12radic11987922 minus 41198632
(24)
Straightforward computation shows that these eigenvalueshave negative real parts and hence the first planar equilibriumpoint 1198642 is locally asymptotically stable if and only if thefollowing sufficient conditions hold
1199082119904 lt 11990831198771199101199081 + 119877119904 + 1199084 (25a)
1198772119904 119910(1199081 + 119877119904)2 +
1199087119910(1199088 + 119910)2 lt 119904 (25b)
11990871198772119910 (1199081 + 119877119904) + 119908111990851198772 (1199088 + 119910)2gt 1199087 (1199081 + 119877119904)3 (25c)
Similarly the Jacobian matrix at second planar equilibriumpoint 1198643 = (119904 0) can be written
119869 (1198643)
=[[[[[[[[[[[[
minus119904 minus119904 (1 + 1199082) minus 1198771199041199081 + 119877119904 + 120579119877
1199082 0 minus 11990831198771199081 + 119877119904 + 1205791198770 0 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089
]]]]]]]]]]]]
(26)
Then the eigenvalues of 119869(1198643) are given by
( 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 minus 120582) (1205822 minus 1198793120582 + 1198633)
= 0(27)
where
1198793 = minus119904 lt 01198633 = 1199082 (1 + 1199082) 119904 gt 0 (28)
Clearly the first two eigenvalues resulting from second termin (27) have negative real parts while the third eigenvalues inthe 119910 minusdirection which are written as
12058233 = 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 (29)
have negative real part and then the second planar equilib-rium point is locally asymptotically stable if and only if
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 lt11990871199088 + 1199089 (30)
Finally the Jacobian matrix at coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) can be written in the form
119869 (1198644) = [119886119894119895] 119894 119895 = 1 2 3 (31)
6 Journal of Applied Mathematics
where
11988611 = 1198772119904lowast119910lowast minus 119873lowast1 2119904lowast119873lowast1 2
11988612 = 1205791198772119904lowast119910lowast minus (1 + 1199082)119873lowast1 2119904lowast119873lowast1 2
11988613 = minus119877119904lowast119873lowast1 lt 0
11988621 = 1199082119894lowast + 11990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988622 = 12057911990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988623 = minus1199083119877119894lowast119873lowast1 lt 0
11988631 = 11990811199085119877119910lowast + (1199085120579 minus 1199086) 1198772119894lowast119910lowast119873lowast1 2
11988632 = 11990811199086119877119910lowast + (1199086 minus 1205791199085) 1198772119904lowast119910lowast119873lowast1 2
11988633 = 1199087119910lowast119873lowast2 2 gt 0
(32)
Here 119873lowast1 = 1199081 + 119877119904lowast + 120579119877119894lowast and 119873lowast2 = 1199088 + 119910lowast Thecharacteristic equation of 119869(1198644) can be written in the form
1205823 + 11986011205822 + 1198602120582 + 1198603 = 0 (33)
where
1198601 = minus (11988611 + 11988622 + 11988633)1198602 = 1198861111988622 minus 1198861211988621 + 1198861111988633 minus 1198861311988631 + 1198862211988633
minus 11988623119886321198603 = 11988633 (1198861211988621 minus 1198861111988622) minus 11988623 (1198861211988631 minus 1198861111988632)
minus 11988613 (1198862111988632 minus 1198862211988631)
(34)
while
= 11986011198602 minus 1198603= minus (11988611 + 11988622) [1198861111988622 minus 1198861211988621] minus 2119886111198862211988633
minus (11988611 + 11988633) [1198861111988633 minus 1198861311988631]minus (11988622 + 11988633) [1198862311988632 minus 1198862211988633]
(35)
Therefore straightforward computation shows that
1198601 = minus 1119873lowast1 2119873lowast2 2 [119873lowast2
2119904lowast (1198772119910lowast minus 119873lowast1 2)+ 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowast]
1198603 = 1199087119904lowast119894lowast119910lowast119873lowast1 2119873lowast2 2 [(1199082 + 1199083) 1205791198772119910lowast minus (1 + 1199082)sdot (1199082119873lowast1 2 + 11990831198772119910lowast)] + 1199083119877119904lowast119894lowast119910lowast119873lowast1 5 [(1199085120579 minus 1199086)sdot 1198772119873lowast1 [119877119910lowast minus 119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)]+ 1199081 (1199086 minus 1199085 (1 + 1199082)) 119877119873lowast1 2]+ 1198772119904lowast2119910lowast
119873lowast1 4 [119908111990821199086119873lowast1+ 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)minus 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)]
(36)
while
= minus119872lowast1 +119872lowast2 +119872lowast3 minus119872lowast4 (37)
with
119872lowast1 = 1119873lowast1 6 [119873lowast1
2119904lowast119894lowast119910lowast (1198772119904lowast119910lowast minus 119873lowast1 2119904lowast+ 11990831205791198772119894lowast119910lowast) ((1 + 1199082) [1199082119873lowast1 2 + 11990831198772119910lowast]minus (1199082 + 1199083) 1205791198772119910lowast)]
119872lowast2 = 119908311990871205791198772119904lowast119894lowast119910lowast2119873lowast1 4119873lowast2 2 [119873lowast1 2 minus 1198772119910lowast]119872lowast3 = 119904lowast119910lowast
119873lowast1 6119873lowast2 4 [(minus1198772119873lowast2 2119904lowast119910lowast + 119873lowast1 2119873lowast2 2119904lowast
minus 1199087119873lowast1 2119910lowast) (11990871198772119873lowast1 2119910lowast minus 1199087119873lowast1 4+ 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowast)]
119872lowast4 = 11990831198772119894lowast119910lowast2119873lowast1 6119873lowast2 2 [(11990831205791198772119873lowast2 2119894lowast + 1199087119873lowast2 2)sdot (11990811199086119873lowast1 + (1199086 minus 1205791199085) 119877119873lowast1 119904lowast + 1205791199087119910lowast)]
(38)
Keeping the above in view it is well known that from Routh-Hurwitz criterion (33) has three roots with negative real partsprovided that 1198601 gt 0 1198603 gt 0 and gt 0 Consequently thefollowing theorem can be proved easily
Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Journal of Applied Mathematics
while 119904lowast is a unique positive root of the following third-orderpolynomial equation
11986311199043 + 11986321199042 + 1198633119904 + 1198634 = 0 (11c)
Here
1198631 = (1205903 minus (1199082 + 1199083) 1205906)119908212059051198632 = (11990821205904 minus 11990841205905) 1205903 minus 1199082 (1199082 + 1199083) 12059041205906
+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059051205906minus 119908212059051205908
1198633 = [1205901 minus 1205902 (1199082 + 1199083)] minus 119908412059031205904+ [1199082 (1199083 + 1199084) + 1199084 (1199082 + 1199083)] 12059041205906minus 1199084 (1199083 + 1199084) 12059051205906 minus 119908212059041205908 + 119908412059051205908
1198634 = 1205902 (1199083 + 1199084) minus 1205907 minus 1199084 (1199083 + 1199084) 12059041205906+ 119908412059041205908
(12)
with
1205901 = [11990851199088 minus (1199087 + 11990881199089)] 11990833 (1 + 1199082)2 11987721205902 = [11990861199088 minus 120579 (1199087 + 11990881199089)]11990832 (1 + 1199082) 11987721205903 = (1199085 minus 1199089) 1199083 (1 + 1199082) 11987721205904 = [11990811199083 (1 + 1199082) + (1199083 + 1199084) 120579119877]1205905 = [1199083 (1 + 1199082) 119877 minus (1199082 + 1199083) 120579119877]1205906 = (1199086 minus 1199089120579) 1198771205907 = 1199081 (1199087 + 11990881199089) 11990833 (1 + 1199082)2 1198771205908 = 119908111990891199083 (1 + 1199082) 119877
(13)
Clearly (11c) has a unique positive root provided that one setof the following sets of conditions holds
1198631 gt 01198632 gt 01198634 lt 0
(14a)
1198631 gt 01198633 lt 01198634 lt 0
(14b)
1198631 lt 01198632 lt 01198634 gt 0
(14c)
1198631 lt 01198633 gt 01198634 gt 0
(14d)
Consequently the coexistence equilibrium point 1198644 =(119904lowast 119894lowast 119910lowast) exists uniquely in the interior ofR3+ provided thatin addition to any one of conditions (14a) (14b) (14c) and(14d) the following sufficient conditions hold
119904lowast lt 1199083 + 1199084(1199082 + 1199083) (15a)
(1199082119904lowast minus 1199084) [1205904 + 1205905119904] gt 0 (15b)
Now in order to study the local stability of these equilibriumpoints the Jacobian matrix of system (3) at the point 119864 =(119904 119894 119910) is computed as follows
119869 (119864) = (119862119894119895)3times3 (16)
where
11986211 = 1198911 (119904 119894 119910) + 119904 (119877211991011987312 minus 1) 11986212 = 119904(120579119877211991011987312 minus (1 + 1199082)) 11986213 = 119904 (minus 1198771198731) 11986221 = 119894(1199082 + 1199083119877211991011987312 ) 11986222 = 1198912 (119904 119894 119910) + 119894 (1205791199083119877211991011987312 ) 11986223 = 119894 (minus11990831198771198731 ) 11986231 = 119910(11990811199085119877 + (1199085120579 minus 1199086) 119877211989411987312 ) 11986232 = 119910(11990811199086119877 + (1199086 minus 1205791199085) 119877211990411987312 ) 11986233 = 119910( 119908711987322) + 1198913 (119904 119894 119910)
(17)
Here1198731 = 1199081 +119877119904 + 120579119877119894 and1198732 = 1199088 +119910 Consequently theJacobian matrix at vanishing equilibrium point 1198640 = (0 0 0)is written as
119869 (1198640) = [[[[[
1 0 00 minus1199084 00 0 minus(11990871199088 + 1199089)
]]]]]
(18)
Journal of Applied Mathematics 5
Obviously the eigenvalues of 119869(1198640) are given by 12058201 = 1 gt 012058202 = minus1199084 lt 0 12058203 = minus(11990871199088 + 1199089) lt 0 Therefore 1198640 is asaddle point
The Jacobian matrix at axial equilibrium point 1198641 =(1 0 0) is written as
119869 (1198641) =[[[[[[[[[
minus1 minus (1 + 1199082) minus 1198771199081 + 1198770 1199082 minus 1199084 00 0 11990851198771199081 + 119877 minus 11990871199088 minus 1199089
]]]]]]]]]
(19)
Then the eigenvalues of 119869(1198641) are given by12058211 = minus1 lt 012058212 =1199082 minus 1199084 and 12058213 = 1199085119877(1199081 + 119877) minus 11990871199088 minus 1199089 Accordinglythe axial point 1198641 is locally asymptotically stable if and only if
1199082 lt 1199084 (20a)
11990851198771199081 + 119877 lt 11990871199088 + 1199089 (20b)
Now the Jacobian matrix at first planar equilibrium point1198642 = (119904 0 119910) can be written
119869 (1198642)
=[[[[[[[[[[[[
1198772119904 119910(1199081 + 119877119904)2 minus 119904 1205791198772119904 119910
(1199081 + 119877119904)2 minus (1 + 1199082) 119904 minus 1198771199041199081 + 1198771199040 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 0
11990811199085119877119910(1199081 + 119877119904)211990811199086119877119910 + (1199086 minus 1205791199085) 1198772119904 119910(1199081 + 119877119904)2
1199087119910(1199088 + 119910)2
]]]]]]]]]]]]
(21)
ClearlyThe eigenvalues of 119869(1198642) can be determined as follows
(1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 minus 120582) (1205822 minus 1198792120582 + 1198632120582) = 0 (22)
where
1198792 = 1198772119904 119910(1199081 + 119877119904)2 minus 119904 + 1199087119910(1199088 + 119910)2
1198632 = ( 1198772119904 119910(1199081 + 119877119904)2 minus 119904)( 1199087119910(1199088 + 119910)2)
+ ( 1198771199041199081 + 119877119904)( 11990811199085119877119910(1199081 + 119877119904)2)
(23)
Therefore the eigenvalues of 119869(1198642) are easily determined by
12058221 = 11987922 minus 12radic11987922 minus 4119863212058222 = 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 119908412058223 = 11987922 + 12radic11987922 minus 41198632
(24)
Straightforward computation shows that these eigenvalueshave negative real parts and hence the first planar equilibriumpoint 1198642 is locally asymptotically stable if and only if thefollowing sufficient conditions hold
1199082119904 lt 11990831198771199101199081 + 119877119904 + 1199084 (25a)
1198772119904 119910(1199081 + 119877119904)2 +
1199087119910(1199088 + 119910)2 lt 119904 (25b)
11990871198772119910 (1199081 + 119877119904) + 119908111990851198772 (1199088 + 119910)2gt 1199087 (1199081 + 119877119904)3 (25c)
Similarly the Jacobian matrix at second planar equilibriumpoint 1198643 = (119904 0) can be written
119869 (1198643)
=[[[[[[[[[[[[
minus119904 minus119904 (1 + 1199082) minus 1198771199041199081 + 119877119904 + 120579119877
1199082 0 minus 11990831198771199081 + 119877119904 + 1205791198770 0 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089
]]]]]]]]]]]]
(26)
Then the eigenvalues of 119869(1198643) are given by
( 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 minus 120582) (1205822 minus 1198793120582 + 1198633)
= 0(27)
where
1198793 = minus119904 lt 01198633 = 1199082 (1 + 1199082) 119904 gt 0 (28)
Clearly the first two eigenvalues resulting from second termin (27) have negative real parts while the third eigenvalues inthe 119910 minusdirection which are written as
12058233 = 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 (29)
have negative real part and then the second planar equilib-rium point is locally asymptotically stable if and only if
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 lt11990871199088 + 1199089 (30)
Finally the Jacobian matrix at coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) can be written in the form
119869 (1198644) = [119886119894119895] 119894 119895 = 1 2 3 (31)
6 Journal of Applied Mathematics
where
11988611 = 1198772119904lowast119910lowast minus 119873lowast1 2119904lowast119873lowast1 2
11988612 = 1205791198772119904lowast119910lowast minus (1 + 1199082)119873lowast1 2119904lowast119873lowast1 2
11988613 = minus119877119904lowast119873lowast1 lt 0
11988621 = 1199082119894lowast + 11990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988622 = 12057911990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988623 = minus1199083119877119894lowast119873lowast1 lt 0
11988631 = 11990811199085119877119910lowast + (1199085120579 minus 1199086) 1198772119894lowast119910lowast119873lowast1 2
11988632 = 11990811199086119877119910lowast + (1199086 minus 1205791199085) 1198772119904lowast119910lowast119873lowast1 2
11988633 = 1199087119910lowast119873lowast2 2 gt 0
(32)
Here 119873lowast1 = 1199081 + 119877119904lowast + 120579119877119894lowast and 119873lowast2 = 1199088 + 119910lowast Thecharacteristic equation of 119869(1198644) can be written in the form
1205823 + 11986011205822 + 1198602120582 + 1198603 = 0 (33)
where
1198601 = minus (11988611 + 11988622 + 11988633)1198602 = 1198861111988622 minus 1198861211988621 + 1198861111988633 minus 1198861311988631 + 1198862211988633
minus 11988623119886321198603 = 11988633 (1198861211988621 minus 1198861111988622) minus 11988623 (1198861211988631 minus 1198861111988632)
minus 11988613 (1198862111988632 minus 1198862211988631)
(34)
while
= 11986011198602 minus 1198603= minus (11988611 + 11988622) [1198861111988622 minus 1198861211988621] minus 2119886111198862211988633
minus (11988611 + 11988633) [1198861111988633 minus 1198861311988631]minus (11988622 + 11988633) [1198862311988632 minus 1198862211988633]
(35)
Therefore straightforward computation shows that
1198601 = minus 1119873lowast1 2119873lowast2 2 [119873lowast2
2119904lowast (1198772119910lowast minus 119873lowast1 2)+ 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowast]
1198603 = 1199087119904lowast119894lowast119910lowast119873lowast1 2119873lowast2 2 [(1199082 + 1199083) 1205791198772119910lowast minus (1 + 1199082)sdot (1199082119873lowast1 2 + 11990831198772119910lowast)] + 1199083119877119904lowast119894lowast119910lowast119873lowast1 5 [(1199085120579 minus 1199086)sdot 1198772119873lowast1 [119877119910lowast minus 119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)]+ 1199081 (1199086 minus 1199085 (1 + 1199082)) 119877119873lowast1 2]+ 1198772119904lowast2119910lowast
119873lowast1 4 [119908111990821199086119873lowast1+ 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)minus 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)]
(36)
while
= minus119872lowast1 +119872lowast2 +119872lowast3 minus119872lowast4 (37)
with
119872lowast1 = 1119873lowast1 6 [119873lowast1
2119904lowast119894lowast119910lowast (1198772119904lowast119910lowast minus 119873lowast1 2119904lowast+ 11990831205791198772119894lowast119910lowast) ((1 + 1199082) [1199082119873lowast1 2 + 11990831198772119910lowast]minus (1199082 + 1199083) 1205791198772119910lowast)]
119872lowast2 = 119908311990871205791198772119904lowast119894lowast119910lowast2119873lowast1 4119873lowast2 2 [119873lowast1 2 minus 1198772119910lowast]119872lowast3 = 119904lowast119910lowast
119873lowast1 6119873lowast2 4 [(minus1198772119873lowast2 2119904lowast119910lowast + 119873lowast1 2119873lowast2 2119904lowast
minus 1199087119873lowast1 2119910lowast) (11990871198772119873lowast1 2119910lowast minus 1199087119873lowast1 4+ 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowast)]
119872lowast4 = 11990831198772119894lowast119910lowast2119873lowast1 6119873lowast2 2 [(11990831205791198772119873lowast2 2119894lowast + 1199087119873lowast2 2)sdot (11990811199086119873lowast1 + (1199086 minus 1205791199085) 119877119873lowast1 119904lowast + 1205791199087119910lowast)]
(38)
Keeping the above in view it is well known that from Routh-Hurwitz criterion (33) has three roots with negative real partsprovided that 1198601 gt 0 1198603 gt 0 and gt 0 Consequently thefollowing theorem can be proved easily
Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 5
Obviously the eigenvalues of 119869(1198640) are given by 12058201 = 1 gt 012058202 = minus1199084 lt 0 12058203 = minus(11990871199088 + 1199089) lt 0 Therefore 1198640 is asaddle point
The Jacobian matrix at axial equilibrium point 1198641 =(1 0 0) is written as
119869 (1198641) =[[[[[[[[[
minus1 minus (1 + 1199082) minus 1198771199081 + 1198770 1199082 minus 1199084 00 0 11990851198771199081 + 119877 minus 11990871199088 minus 1199089
]]]]]]]]]
(19)
Then the eigenvalues of 119869(1198641) are given by12058211 = minus1 lt 012058212 =1199082 minus 1199084 and 12058213 = 1199085119877(1199081 + 119877) minus 11990871199088 minus 1199089 Accordinglythe axial point 1198641 is locally asymptotically stable if and only if
1199082 lt 1199084 (20a)
11990851198771199081 + 119877 lt 11990871199088 + 1199089 (20b)
Now the Jacobian matrix at first planar equilibrium point1198642 = (119904 0 119910) can be written
119869 (1198642)
=[[[[[[[[[[[[
1198772119904 119910(1199081 + 119877119904)2 minus 119904 1205791198772119904 119910
(1199081 + 119877119904)2 minus (1 + 1199082) 119904 minus 1198771199041199081 + 1198771199040 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 0
11990811199085119877119910(1199081 + 119877119904)211990811199086119877119910 + (1199086 minus 1205791199085) 1198772119904 119910(1199081 + 119877119904)2
1199087119910(1199088 + 119910)2
]]]]]]]]]]]]
(21)
ClearlyThe eigenvalues of 119869(1198642) can be determined as follows
(1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084 minus 120582) (1205822 minus 1198792120582 + 1198632120582) = 0 (22)
where
1198792 = 1198772119904 119910(1199081 + 119877119904)2 minus 119904 + 1199087119910(1199088 + 119910)2
1198632 = ( 1198772119904 119910(1199081 + 119877119904)2 minus 119904)( 1199087119910(1199088 + 119910)2)
+ ( 1198771199041199081 + 119877119904)( 11990811199085119877119910(1199081 + 119877119904)2)
(23)
Therefore the eigenvalues of 119869(1198642) are easily determined by
12058221 = 11987922 minus 12radic11987922 minus 4119863212058222 = 1199082119904 minus 11990831198771199101199081 + 119877119904 minus 119908412058223 = 11987922 + 12radic11987922 minus 41198632
(24)
Straightforward computation shows that these eigenvalueshave negative real parts and hence the first planar equilibriumpoint 1198642 is locally asymptotically stable if and only if thefollowing sufficient conditions hold
1199082119904 lt 11990831198771199101199081 + 119877119904 + 1199084 (25a)
1198772119904 119910(1199081 + 119877119904)2 +
1199087119910(1199088 + 119910)2 lt 119904 (25b)
11990871198772119910 (1199081 + 119877119904) + 119908111990851198772 (1199088 + 119910)2gt 1199087 (1199081 + 119877119904)3 (25c)
Similarly the Jacobian matrix at second planar equilibriumpoint 1198643 = (119904 0) can be written
119869 (1198643)
=[[[[[[[[[[[[
minus119904 minus119904 (1 + 1199082) minus 1198771199041199081 + 119877119904 + 120579119877
1199082 0 minus 11990831198771199081 + 119877119904 + 1205791198770 0 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089
]]]]]]]]]]]]
(26)
Then the eigenvalues of 119869(1198643) are given by
( 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 minus 120582) (1205822 minus 1198793120582 + 1198633)
= 0(27)
where
1198793 = minus119904 lt 01198633 = 1199082 (1 + 1199082) 119904 gt 0 (28)
Clearly the first two eigenvalues resulting from second termin (27) have negative real parts while the third eigenvalues inthe 119910 minusdirection which are written as
12058233 = 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus11990871199088 minus 1199089 (29)
have negative real part and then the second planar equilib-rium point is locally asymptotically stable if and only if
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 lt11990871199088 + 1199089 (30)
Finally the Jacobian matrix at coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) can be written in the form
119869 (1198644) = [119886119894119895] 119894 119895 = 1 2 3 (31)
6 Journal of Applied Mathematics
where
11988611 = 1198772119904lowast119910lowast minus 119873lowast1 2119904lowast119873lowast1 2
11988612 = 1205791198772119904lowast119910lowast minus (1 + 1199082)119873lowast1 2119904lowast119873lowast1 2
11988613 = minus119877119904lowast119873lowast1 lt 0
11988621 = 1199082119894lowast + 11990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988622 = 12057911990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988623 = minus1199083119877119894lowast119873lowast1 lt 0
11988631 = 11990811199085119877119910lowast + (1199085120579 minus 1199086) 1198772119894lowast119910lowast119873lowast1 2
11988632 = 11990811199086119877119910lowast + (1199086 minus 1205791199085) 1198772119904lowast119910lowast119873lowast1 2
11988633 = 1199087119910lowast119873lowast2 2 gt 0
(32)
Here 119873lowast1 = 1199081 + 119877119904lowast + 120579119877119894lowast and 119873lowast2 = 1199088 + 119910lowast Thecharacteristic equation of 119869(1198644) can be written in the form
1205823 + 11986011205822 + 1198602120582 + 1198603 = 0 (33)
where
1198601 = minus (11988611 + 11988622 + 11988633)1198602 = 1198861111988622 minus 1198861211988621 + 1198861111988633 minus 1198861311988631 + 1198862211988633
minus 11988623119886321198603 = 11988633 (1198861211988621 minus 1198861111988622) minus 11988623 (1198861211988631 minus 1198861111988632)
minus 11988613 (1198862111988632 minus 1198862211988631)
(34)
while
= 11986011198602 minus 1198603= minus (11988611 + 11988622) [1198861111988622 minus 1198861211988621] minus 2119886111198862211988633
minus (11988611 + 11988633) [1198861111988633 minus 1198861311988631]minus (11988622 + 11988633) [1198862311988632 minus 1198862211988633]
(35)
Therefore straightforward computation shows that
1198601 = minus 1119873lowast1 2119873lowast2 2 [119873lowast2
2119904lowast (1198772119910lowast minus 119873lowast1 2)+ 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowast]
1198603 = 1199087119904lowast119894lowast119910lowast119873lowast1 2119873lowast2 2 [(1199082 + 1199083) 1205791198772119910lowast minus (1 + 1199082)sdot (1199082119873lowast1 2 + 11990831198772119910lowast)] + 1199083119877119904lowast119894lowast119910lowast119873lowast1 5 [(1199085120579 minus 1199086)sdot 1198772119873lowast1 [119877119910lowast minus 119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)]+ 1199081 (1199086 minus 1199085 (1 + 1199082)) 119877119873lowast1 2]+ 1198772119904lowast2119910lowast
119873lowast1 4 [119908111990821199086119873lowast1+ 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)minus 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)]
(36)
while
= minus119872lowast1 +119872lowast2 +119872lowast3 minus119872lowast4 (37)
with
119872lowast1 = 1119873lowast1 6 [119873lowast1
2119904lowast119894lowast119910lowast (1198772119904lowast119910lowast minus 119873lowast1 2119904lowast+ 11990831205791198772119894lowast119910lowast) ((1 + 1199082) [1199082119873lowast1 2 + 11990831198772119910lowast]minus (1199082 + 1199083) 1205791198772119910lowast)]
119872lowast2 = 119908311990871205791198772119904lowast119894lowast119910lowast2119873lowast1 4119873lowast2 2 [119873lowast1 2 minus 1198772119910lowast]119872lowast3 = 119904lowast119910lowast
119873lowast1 6119873lowast2 4 [(minus1198772119873lowast2 2119904lowast119910lowast + 119873lowast1 2119873lowast2 2119904lowast
minus 1199087119873lowast1 2119910lowast) (11990871198772119873lowast1 2119910lowast minus 1199087119873lowast1 4+ 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowast)]
119872lowast4 = 11990831198772119894lowast119910lowast2119873lowast1 6119873lowast2 2 [(11990831205791198772119873lowast2 2119894lowast + 1199087119873lowast2 2)sdot (11990811199086119873lowast1 + (1199086 minus 1205791199085) 119877119873lowast1 119904lowast + 1205791199087119910lowast)]
(38)
Keeping the above in view it is well known that from Routh-Hurwitz criterion (33) has three roots with negative real partsprovided that 1198601 gt 0 1198603 gt 0 and gt 0 Consequently thefollowing theorem can be proved easily
Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Journal of Applied Mathematics
where
11988611 = 1198772119904lowast119910lowast minus 119873lowast1 2119904lowast119873lowast1 2
11988612 = 1205791198772119904lowast119910lowast minus (1 + 1199082)119873lowast1 2119904lowast119873lowast1 2
11988613 = minus119877119904lowast119873lowast1 lt 0
11988621 = 1199082119894lowast + 11990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988622 = 12057911990831198772119894lowast119910lowast119873lowast1 2 gt 0
11988623 = minus1199083119877119894lowast119873lowast1 lt 0
11988631 = 11990811199085119877119910lowast + (1199085120579 minus 1199086) 1198772119894lowast119910lowast119873lowast1 2
11988632 = 11990811199086119877119910lowast + (1199086 minus 1205791199085) 1198772119904lowast119910lowast119873lowast1 2
11988633 = 1199087119910lowast119873lowast2 2 gt 0
(32)
Here 119873lowast1 = 1199081 + 119877119904lowast + 120579119877119894lowast and 119873lowast2 = 1199088 + 119910lowast Thecharacteristic equation of 119869(1198644) can be written in the form
1205823 + 11986011205822 + 1198602120582 + 1198603 = 0 (33)
where
1198601 = minus (11988611 + 11988622 + 11988633)1198602 = 1198861111988622 minus 1198861211988621 + 1198861111988633 minus 1198861311988631 + 1198862211988633
minus 11988623119886321198603 = 11988633 (1198861211988621 minus 1198861111988622) minus 11988623 (1198861211988631 minus 1198861111988632)
minus 11988613 (1198862111988632 minus 1198862211988631)
(34)
while
= 11986011198602 minus 1198603= minus (11988611 + 11988622) [1198861111988622 minus 1198861211988621] minus 2119886111198862211988633
minus (11988611 + 11988633) [1198861111988633 minus 1198861311988631]minus (11988622 + 11988633) [1198862311988632 minus 1198862211988633]
(35)
Therefore straightforward computation shows that
1198601 = minus 1119873lowast1 2119873lowast2 2 [119873lowast2
2119904lowast (1198772119910lowast minus 119873lowast1 2)+ 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowast]
1198603 = 1199087119904lowast119894lowast119910lowast119873lowast1 2119873lowast2 2 [(1199082 + 1199083) 1205791198772119910lowast minus (1 + 1199082)sdot (1199082119873lowast1 2 + 11990831198772119910lowast)] + 1199083119877119904lowast119894lowast119910lowast119873lowast1 5 [(1199085120579 minus 1199086)sdot 1198772119873lowast1 [119877119910lowast minus 119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)]+ 1199081 (1199086 minus 1199085 (1 + 1199082)) 119877119873lowast1 2]+ 1198772119904lowast2119910lowast
119873lowast1 4 [119908111990821199086119873lowast1+ 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)minus 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)]
(36)
while
= minus119872lowast1 +119872lowast2 +119872lowast3 minus119872lowast4 (37)
with
119872lowast1 = 1119873lowast1 6 [119873lowast1
2119904lowast119894lowast119910lowast (1198772119904lowast119910lowast minus 119873lowast1 2119904lowast+ 11990831205791198772119894lowast119910lowast) ((1 + 1199082) [1199082119873lowast1 2 + 11990831198772119910lowast]minus (1199082 + 1199083) 1205791198772119910lowast)]
119872lowast2 = 119908311990871205791198772119904lowast119894lowast119910lowast2119873lowast1 4119873lowast2 2 [119873lowast1 2 minus 1198772119910lowast]119872lowast3 = 119904lowast119910lowast
119873lowast1 6119873lowast2 4 [(minus1198772119873lowast2 2119904lowast119910lowast + 119873lowast1 2119873lowast2 2119904lowast
minus 1199087119873lowast1 2119910lowast) (11990871198772119873lowast1 2119910lowast minus 1199087119873lowast1 4+ 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowast)]
119872lowast4 = 11990831198772119894lowast119910lowast2119873lowast1 6119873lowast2 2 [(11990831205791198772119873lowast2 2119894lowast + 1199087119873lowast2 2)sdot (11990811199086119873lowast1 + (1199086 minus 1205791199085) 119877119873lowast1 119904lowast + 1205791199087119910lowast)]
(38)
Keeping the above in view it is well known that from Routh-Hurwitz criterion (33) has three roots with negative real partsprovided that 1198601 gt 0 1198603 gt 0 and gt 0 Consequently thefollowing theorem can be proved easily
Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 7
Theorem2 The coexistence equilibriumpoint 1198644 of system (3)is locally asymptotically stable in the interior of positive coneprovided that the following sufficient conditions hold
max(1 + 1199082) 1199085 1205791199085119877119904lowast1199081 + 119877119904lowast lt 1199086 lt 1199085120579 (39a)
max(1 + 1199082) (1199082119873lowast1 2 + 11990831198772119910lowast)120579 (1199082 + 1199083)
119877119873lowast1 (119904lowast + (1 + 1199082) 119894lowast)lt 1198772119910lowast lt (1 + 1199082)120579
sdot 119873lowast1 2
(39b)
1198772119873lowast2 2119904lowast119910lowast + 12057911990831198772119873lowast2 2119894lowast119910lowast + 1199087119873lowast1 2119910lowastlt 119873lowast1 2119873lowast2 2119904lowast
(39c)
119908111990821199086119873lowast1 + 1199086119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast)gt 1199085120579119877 (1199082119873lowast1 119904lowast + 1199083119877119910lowast) (39d)
11990871198772119873lowast1 2119910lowast + 119908111990851198772119873lowast2 2 + (1199085120579 minus 1199086) 1198773119873lowast2 2119894lowastgt 1199087119873lowast1 4
(39e)
119872lowast2 +119872lowast3 gt (119872lowast1 +119872lowast4 ) (39f)
Now before we start studying the global stability of the systemthe persistence of system (3) which represents biologically thecoexistence of all the species for all the time while mathemati-cally it indicates that the solution of system (3) for all 119905 gt 0 doesnot have omega limit set on the boundary planes is investigatedin the following theorem when there are no periodic dynamicson the boundary planes
Clearly system (3) has two subsystems The first subsystemexists in case of absence of predator species while the secondsubsystem exists in case of absence of disease These subsystemscan be written respectively as follows
119889119904119889119905 = 119904 [1 minus (119904 + 119894) minus 1199082119894] = 11989111 (119904 119894)119889119894119889119905 = 119894 [1199082119904 minus 1199084] = 11989112 (119904 119894)
(40)
119889119904119889119905 = 119904 [1 minus 119904 minus 1198771199101199081 + 119877119904] = 11989121 (119904 119910)119889119910119889119905 = 119910 [ 11990851198771199041199081 + 119877119904 minus 11990871199088 + 119910 minus 1199089] = 11989123 (119904 119910)
(41)
Note that it is easy to verify that these two subsystems haveunique positive equilibrium points in the interior of theirpositive domains Σ1 = (119904 119894) isin R2 119904(0) ge 0 119894(0) ge 0and Σ2 = (119904 119910) isin R2 119904(0) ge 0 119910(0) ge 0 respectivelyThese two positive equilibrium points are given by 1198901 = (119904 )and 1198902 = (119904 119910) for subsystems (40) and (41) respectively In
fact they coincide with the predator free equilibrium point 1198643and disease free equilibriumpoint 1198642 of system (3) respectivelyand have the same existence conditions
Therefore according to the BendixsonndashDulac theoremon dynamical system (40) ldquoif there exists a 1198621 function120593(119904 119894) called the Dulac function such that the expression(120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) has the same sign and is not iden-tically zero ( = 0) almost everywhere in the simply connectedregion of the plane then system (40) has no nonconstantperiodic dynamic lying entirely in the Σ1 Thus by choosing120593(119904 119894) = 1119904119894 we obtain that (120597120597119904)(12059311989111) + (120597120597119894)(12059311989112) =minus1119894 lt 0 Therefore subsystem (40) has no periodic dynamiclying entirely in interior Σ1 and hence 1198901 equiv 1198643 is a globallyasymptotically stable in the interior of Σ1 Similarly by choosing120593(119904 119894) = 1119904119910 we can show that the positive equilibrium pointof the second subsystem (41) given by 1198902 equiv 1198642 is globallyasymptotically stable in the interior of the Σ2 provided that oneof the following two conditions holds
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 gt1119910 (42)
1198772(1199081 + 119877119904)2 +
1199087119904 (1199088 + 119910)2 lt1119910 (43)
Theorem 3 Assume that condition (42) or (43) holds Thensystem (3) is persistent provided that
1199082 gt 1199084 (44a)
11990851198771199081 + 119877 gt 11990871199088 + 1199089 (44b)
1199082119904 gt 11990831198771199101199081 + 119877119904 + 1199084 (44c)
1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 gt11990871199088 + 1199089 (44d)
Proof Consider the following function 120593(119904 119894 119910) = 119904120572119894120573119910120574where 120572 120573 and 120574 are positive constants clearly 120593(119904 119894 119910) gt 0for all (119904 119894 119910) isin IntR3+ and 120593(119904 119894 119910) 997888rarr 0 when 119904 119894 or 119910 997888rarr0 Furthermore it is clear that
1205931015840120593 = 120572 [1 minus (119904 + 119894) minus 1198771199101199081 + 119877119904 + 120579119877119894 minus 1199082119894]+ 120573 [1199082119904 minus 11990831198771199101199081 + 119877119904 + 120579119877119894 minus 1199084]+ 120574 [ 1199085119877119904 + 11990861198771198941199081 + 119877119904 + 120579119877119894 minus 11990871199088 + 119910 minus 1199089]
(45)
8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Journal of Applied Mathematics
Now the proof follows if 1205931015840120593 gt 0 for all the boundaryequilibrium points for suitable choice of constants 120572 gt 0120573 gt 0 and 120574 gt 0
1205931015840120593 (1198640) = 120572 minus 1199084120573 minus [11990871199088 + 1199089] 1205741205931015840120593 (1198641) = [1199082 minus 1199084] 120573 + [ 11990851198771199081 + 119877 minus 11990871199088 minus 1199089] 1205741205931015840120593 (1198642) = [1199082119904 minus 11990831198771199101199081 + 119877119904 minus 1199084] 1205731205931015840120593 (1198643) = [ 1199085119877119904 + 11990861198771199081 + 119877119904 + 120579119877 minus
11990871199088 minus 1199089] 120574
(46)
Clearly (1205931015840120593)(1198640) gt 0 for suitable choice of positive constant120572 sufficiently large with respect to the constants 120573 gt 0 and120574 gt 0 while (1205931015840120593)(1198641) is positive under conditions (44a)and (44b) Moreover (1205931015840120593)(1198642) gt 0 under condition (44c)while (1205931015840120593)(1198643) is positive too under condition (44d) Hencethe proof is complete
4 Global Stability
In this section the global stability of each equilibrium pointof system (3) is studied using suitable Lyapunov function asgiven in the following theorems
Theorem 4 Assume that the axial equilibrium point 1198641 =(1 0 0) = (1199040 0 0) is locally asymptotically stable inR3+ Thenit is globally asymptotically stable provided that the followingconditions are outstanding119908611990831199082 lt 1199085 (1 + 1199082) lt 119908611990831199084 (47a)
1199089 gt 1199085 1198771199081 (47b)
Proof Recognize the following function
1198811 = 1198881 int1199041199040
120591 minus 1199040120591 119889120591 + 1198882119894 + 1198883119910 (48)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198811(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(1199040 0 0) and 1198811(1199040 0 0) = 0 Moreover we have that
1198891198811119889119905 = 1198881 (119904 minus 1199040119904 ) 119889119904119889119905 + 1198882 119889119894119889119905 + 1198883119889119910119889119905= minus1198881 (119904 minus 1199040)2 minus 11988811198771199041199101198731 + 119888111987711990401199101198731
minus 1198881 (1 + 1199082) 119904119894 + 1198881 (1 + 1199082) 1199040119894 + 11988821199082119904119894minus 119888211990831198771198941199101198731 minus 11988821199084119894 + 11988831199085119877119904 + 11990861198771198941198731 119910minus 119888311990871199101199088 + 119910 minus 11988831199089119910
(49)
Here 119877 = (1 minus119898)1198731 = 1199081 +119877119904 + 120579119877119894 Further simplificationgives that
1198891198811119889119905 le minus1198881 (119904 minus 1199040)2 minus [1198881 minus 11988831199085] 1198771199041199101198731minus [1198881 (1 + 1199082) minus 11988821199082] 119904119894 minus [11988821199083 minus 11988831199086] 1198771198941199101198731minus [11988821199084 minus 1198881 (1 + 1199082) 1199040] 119894minus [11988831199089 minus 119888111987711990401199081 ] 119910
(50)
So by choosing the positive constants 119888119894 119894 = 1 2 3 as givenbelow we get
1198881 = 11990851198882 = 11990861199083 1198883 = 1
1198891198811119889119905 le minus1199085 (119904 minus 1)2 minus [1199085 (1 + 1199082) minus 119908611990831199082] 119904119894minus [119908611990831199084 minus 1199085 (1 + 1199082)] 119894minus [1199089 minus 1199085 1198771199081 ] 119910
(51)
Clearly conditions (47a)-(47b) guarantee that 1198891198811119889119905 lt0 hence 1198891198811119889119905 is negative definite and hence the axialequilibrium point E1 is globally asymptotically stable and theproof is complete
Theorem 5 Assume that the disease free equilibrium point1198642 = (119904 0 119910) is locally asymptotically stable in R3+ Then itis a globally asymptotically stable provided that the followingconditions hold
11990841199081 (1 + 1199082)1198731 gt 11990841198772120579119910 + 11990811199082 (1 + 1199082)1198731119904 (52a)
1199085120579( 1198771199041198731)2 lt 1199086
lt 119908111990831199085 (1 + 1199082) 119904 + 1199084119908512057911987711990411990841198731(52b)
11990811198731 gt 1198772119910 (52c)
119908711987311199081119908511990881198732 (119910 minus 119910)2 lt [1 minus 119877211991011990811198731] (119904 minus 119904)2 (52d)
where1198731 = 1199081 + 119877119904Proof Consider the function
1198812 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882119894 + 1198883 int119910119910
120591 minus 119910120591 119889120591 (53)
Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 9
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198812(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) =(119904 0 119910) and 1198812(119904 0 119910) = 0 Moreover we have that
1198891198812119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882119894 [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883 (119910 minus 119910) [1199085119877119904 + 11990861198771198941198731 minus 11990871199088 + 119910 minus 1199089]
(54)
Further simplification gives
1198891198812119889119905 = 1198881 (119904 minus 119904) [minus (119904 minus 119904) minus (1 + 1199082) 119894 minus 1198771198731 (119910 minus 119910)+ 119877211991011987311198731 (119904 minus 119904) + 1198772120579119910
11987311198731 119894] + 11990821198882119894119904 minus 119908311987711988821198731 119894119910minus 11990841198882119894 + 1198883 (119910 minus 119910) [11990851198771199041198731 minus 11990851198771199041198731 + 11990861198771198941198731+ 119908711987321198732 (119910 minus 119910)]
(55)
Here1198732 = 1199088 + 119910 and1198732 = 1199088 + 119910Now rearranging the terms of the last equation further
gives
1198891198812119889119905 le minus1198881 [1 minus 119877211991011990811198731] (119904 minus 119904)2
minus 1198771198731 (1198881 minus 1198883119908111990851198731 ) (119904 minus 119904) (119910 minus 119910)+ 1198883119908711990881198732 (119910 minus 119910)2
minus [1198881 ((1 + 1199082) minus 119877212057911991011990811198731) minus 11988821199082] 119904119894
minus 1198771198731 [11988821199083 + 1198883 (11990851205791198771199041198731 minus 1199086)] 119894119910minus 1198771198731 [1198881
1198771205791199041199101198731 minus 1198883 (11990851198771205791199041199101198731 minus 1199086119910)] 119894
minus (11988821199084 minus 1198881 (1 + 1199082) 119904) 119894
(56)
So by choosing the positive constants as
1198881 = 11198882 = (1 + 1199082) 1199041199084 1198883 = 119873111990811199085
(57)
we get that
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2 + 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
minus [1199084 [1199081 (1 + 1199082)1198731 minus 1198772120579119910] minus 11990811199082 (1 + 1199082)1198731119904119908111990841198731 ]
sdot 119904119894 minus 1198771198731 [119908111990831199085 (1 + 1199082) 119904 + 11990841199085120579119877119904 minus 119908411990861198731119908111990841199085 ]
sdot 119894119910
(58)
Accordingly using the given conditions (52a)ndash(52d) weobtain
1198891198812119889119905 le minus[1 minus 119877211991011990811198731 ] (119904 minus 119904)2
+ 119908711987311199081119908511990881198732 (119910 minus 119910)2
minus 11987711991011990811198731 [119908611987312 minus 1199085120579 (119877119904)211990851198731 ] 119894
(59)
Clearly 1198891198812119889119905 lt 0 is negative definite and hence thedisease free equilibrium point E2 is globally asymptoticallystable under the given conditions and hence the proof iscomplete
Theorem 6 Assume that the free predator equilibrium point1198643 = (119904 0) is locally asymptotically stable in R3+ Then itis globally asymptotically stable provided that the followingcondition holds
11990891199085 gt119877 [1199082119904 + 1199083 (1 + 1199082) ]11990811199082 (60a)
11990831199085 (1 + 1199082) gt 11990821199086 (60b)
Proof Consider the next function
1198813 = 1198881 int119904119904
120591 minus 119904120591 119889120591 + 1198882 int119894
120591 minus 120591 119889120591 + 1198883119910 (61)
where 119888119894 119894 = 1 2 3 are positive constants to be determinedlater on Clearly 1198813(119904 119894 119910) gt 0 is a continuously differentiablereal valued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904 0)and 1198813(119904 0) = 0 Moreover we have that
1198891198813119889119905 = 1198881 (119904 minus 119904) [1 minus (119904 + 119894) minus 1198771199101198731 minus 1199082119894]+ 1198882 (119894 minus ) [1199082119904 minus 11990831198771199101198731 minus 1199084]+ 1198883119910 [1199085119877119904 + 11990861198771198941198731 minus 11990871198732 minus 1199089]
(62)
10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

10 Journal of Applied Mathematics
Here 119877 1198731 and 1198732 are given above Now straightforwardcomputations give
1198891198813119889119905 le minus1198881 (119904 minus 119904)2minus [1198881 (1 + 1199082) minus 11988821199082] (119894 minus ) (119904 minus 119904) minus 119888311990871198732119910minus [11988831199089 minus 119888211990831198771199081 minus 1198881 1198771199041199081 ] 119910minus 1198771198731 [1198881 minus 11988831199085] 119904119910 minus 1198771198731 [11988821199083 minus 11988831199086] 119894119910
(63)
By choosing the positive constants as
1198881 = 11198882 = (1 + 1199082)1199082 1198883 = 11199085
(64)
then we obtain that
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
minus 1198771198731 [11990831199085 (1 + 1199082) minus 1199082119908611990821199085 ] 119894119910
(65)
Accordingly using the given conditions (60a) and (60b) weobtain
1198891198813119889119905 le minus (119904 minus 119904)2
minus [11990891199085 minus119877 (1199082119904 + 1199083 (1 + 1199082) )11990811199082 ]119910
(66)
Clearly 1198891198813119889119905 le 0 which means it is negative semi-definite and hence the predator free equilibrium point E3 isglobally stable (but not asymptotically stable) under the givenconditions Moreover since system (3) has the maximuminvariant set for 1198891198813119889119905 = 0 if and only if conditions(60a)-(60b) hold and (119904 119894 119910) = (119904 0) by Lyapunov-Lasallersquos theorem all the solutions starting in R3+ approachthe singleton set 1198643 which is the positively invariant subsetof the setwhere1198891198813119889119905 = 0 Hence E3 becomes attracting toohence it is globally asymptotically stable and that completesthe proof
Theorem 7 Assume that the coexistence equilibrium point1198644 = (119904lowast 119894lowast 119910lowast) of system (3) is locally asymptotically stable
in R3+ Then it is globally asymptotically stable provided thatthe following conditions hold
1198772119910lowast lt min1199081119873lowast1 (1 + 1199082)1199081119873lowast1120579 (67a)
1205791199085119877119904lowast(1199081 + 119877119904lowast) lt 1199086 lt 1199085 (1199081 + 120579119877119894lowast)119877119894lowast (67b)
Λ 1= 119888lowast1 [(1 + 1199082)1198731119873lowast1 minus 1205791198772119910lowast]
minus 119888lowast2 [11990821198731119873lowast1 + 11990831198772119910lowast] gt 0(67c)
2Λ 2 minus Λ 1 gt 0 (67d)
[2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
lt [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2(67e)
Here Λ 119894 119894 = 1 2 3 119888lowast1 and 119888lowast2 are given in the proof
Proof Consider the real valued function
1198814 = 119888lowast1 int119904119904lowast
120591 minus 119904lowast120591 119889120591 + 119888lowast2 int119894119894lowast
120591 minus 119894lowast120591 119889120591+ 119888lowast3 int119910
119910lowast
120591 minus 119910lowast120591 119889120591(68)
Here 119888lowast119894 119894 = 1 2 3 are positive constants to be determinedClearly 1198814(119904 119894 119910) gt 0 is a continuously differentiable realvalued function for all (119904 119894 119910) isin R3+ with (119904 119894 119910) = (119904lowast 119894lowast 119910lowast)and 1198813(119904lowast 119894lowast 119910lowast) = 0 Moreover we have that
1198891198814119889119905 = 119888lowast1 (119904 minus 119904lowast)sdot [minus (119904 minus 119904lowast) minus (1 + 1199082) (119894 minus 119894lowast) minus 1198771199101198731 +
119877119910lowast119873lowast1 ]+ 119888lowast2 (119894 minus 119894lowast) [1199082 (119904 minus 119904lowast) minus 11990831198771199101198731 + 1199083119877119910lowast119873lowast1 ]+ 119888lowast3 (119910 minus 119910lowast) [11987331198731 minus
119873lowast3119873lowast1 minus11990871198732 +
1199087119873lowast2 ]
(69)
Here 1198771198731 and 1198732 are given above while119873lowast1 = 1199081 + 119877119904lowast +120579119877119894lowast119873lowast2 = 1199088 + 119910lowast1198733 = 1199085119877119904 + 1199086119877119894 and 119873lowast3 = 1199085119877119904lowast +1199086119877119894lowast Further simplification for the above equation leads to
1198891198814119889119905 le minus119888lowast1 (1199081119873lowast1 minus 1198772119910lowast1199081119873lowast1 ) (119904 minus 119904lowast)2 + 119888lowast2sdot 12057911990831198772119910lowast1199081119873lowast1 (119894 minus 119894lowast)2 + 119888lowast3 11990871199088119873lowast2 (119910 minus 119910lowast)2 minus (119904minus 119904lowast) (119894 minus 119894lowast) [119888lowast1 ((1199082 + 1)1198731119873lowast1 minus 1205791198772119910lowast1198731119873lowast1 )minus 119888lowast2 (11990821198731119873lowast1 + 11990831198772119910lowast1198731119873lowast1 )] minus (119904 minus 119904lowast) (119910 minus 119910lowast)
Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 11
sdot 1198771198731 [119888lowast1 minus119888lowast3119873lowast1 (11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast)] minus (119894
minus 119894lowast) (119910 minus 119910lowast) 1198771198731 [119888lowast21199083minus 119888lowast3119873lowast1 (11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast)]
(70)
Consequently by choosing the positive constants 119888lowast119894 119894 =1 2 3 as
119888lowast1 = 11990811199085 + 1205791199085119877119894lowast minus 1199086119877119894lowast119873lowast1 119888lowast2 = 11990811199086 minus 1205791199085119877119904lowast + 1199086119877119904lowast1199083119873lowast1
and 119888lowast3 = 1(71)
the following is obtained
1198891198814119889119905 = minus Λ 21198731119873lowast1 (119904 minus 119904lowast)2 + Λ 31198731119873lowast1 (119894 minus 119894lowast)2
+ 11990871198732119873lowast2 (119910 minus 119910lowast)2 minus Λ 11198731119873lowast1 (119904 minus 119904lowast) (119894 minus 119894lowast)(72)
whereΛ 2 = 119888lowast1 (1198731119873lowast1 minus1198772119910lowast) gt 0 andΛ 3 = 119888lowast2 12057911990831198772119910lowast gt 0Further simplification for the last equation gives
1198891198814119889119905 = minus [2Λ 2 minus Λ 11198731119873lowast1 ] (119904 minus 119904lowast)2
+ [2Λ 3 + Λ 11198731119873lowast1 ] (119894 minus 119894lowast)2 + 11990871198732119873lowast2 (119910 minus 119910lowast)2
minus [radic Λ 121198731119873lowast1 (119904 minus 119904lowast) + radic Λ 121198731119873lowast1 (119894 minus 119894lowast)]2
(73)
Clearly 1198891198814119889119905 lt 0 is negative definite function under thegiven conditions and hence the coexistence equilibriumpoint1198644 = (119904lowast 119894lowast 119910lowast) is globally asymptotically stable and thiscompletes the proof
5 Numerical Simulation
In this section the global dynamics of system (3) is stud-ied numerically to verify the obtained analytical results inaddition to specifying the control set of parameters For thefollowing hypothetical set of parameters system (3) is solved
numerically and the obtained trajectories are drawn in theform of phase portrait and time series
1199081 = 041199082 = 051199083 = 11199084 = 011199085 = 041199086 = 071199087 = 021199088 = 11199089 = 01119898 = 04120579 = 1
(74)
It is observed that for the set of data (74) system (3) has aglobally asymptotically stable positive equilibrium point 1198644 =(045 028 017) as shown in Figure 1
Now in order to discover the impact of varying theparameters values on the dynamics of system (3) the systemis solved numerically with varying one parameter each timeand then the attractors of the obtained trajectories are presentin the form of figures as shown in Figures 2ndash7
It is observed that for the set of data (74) with 1199081 ge047 the trajectory of system (3) approaches asymptoticallypredator free equilibrium point while it approaches diseasefree point when 015 lt 1199081 le 025 see Figure 2 Furtherthe trajectory of system (3) approaches periodic dynamicsin the 119904119910 minusplane for data (74) with 1199081 le 015 as shown inFigure 3 however it approaches asymptotically the positiveequilibrium point otherwise
On the other hand for the data (74) with 1199082 ge 088and 01 lt 1199082 le 017 the solution of system (3) approachesasymptotically 1198643 = (119904 0) as shown in Figures 4(a)-4(b)while it approaches asymptotically 1198641 = (1 0 0) when 1199082 le01 as shown in Figure 4(c) Otherwise the system still hasa globally asymptotically stable positive equilibrium pointNote that although it looks confusing as the trajectory ofsystem (3) approaches the predator free equilibrium point 1198643too with decreasing the infection rate 1199082 that depends onour hypothetical set of data in which we assumed that theconversion rate of predator from susceptible (1199085) is less thanthat from infected species (1199086) and once (1199085) enter the range1199085 ge 047 the system approaches disease free point 1198642 =(119904 0 119910) as shown in the typical figure given by Figure 4(d)
Moreover it is observed that varying the parameter 1199083with the rest of parameters as in (74) has a quantitativeeffect on the dynamics of system (3) and the solution stillapproaches a positive equilibrium point that depends on thevalue of1199083 Now for the parameters values given by (74) with02 le 1199084 lt 05 and 05 le 1199084 the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) and 1198641 = (1 0 0)
12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

12 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
02
04
06
08
1Su
scep
tible
pre
y
times 104
Started at 075Started at 085Started at 095Started at 065Started at 055
(a)
0
01
02
03
04
05
06
07
08
09
Infe
cted
pre
y
05 1 15 2 25 30Time times 10
4
Started at 06Started at 07Started at 08Started at 05Started at 04
(b)
0
02
04
06
08
1
Pred
ator
05 1 15 2 25 30Time times 10
4
Started at 05Started at 06Started at 07Started at 04Started at 03
(c)
Figure 1 Time series for the trajectories of system (3) using data (74) with different sets of initial points (a) Trajectories of Susceptible prey(b) Trajectories of infected prey (c) Trajectories of predator
respectively as given in Figure 5 Otherwise the system still isstable at positive equilibrium point There is similar behaviorof the parameter 120579 in the range 120579 ge 13 to that of system (3)using data (74) with 02 le 1199084 lt 05 while the system still isstable at positive equilibrium point otherwise
For the parameters (74) with 1199085 ge 048 (similarlywhen 1199088 ge 15) the trajectory of system (3) approachesasymptotically 1198642 = (119904 0 119910) while it approaches 1198643 = (119904 0)for data (74) with 1199085 le 025 (similarly when 1199086 le 065 or1199088 le 08) as shown in Figure 6 Otherwise the system has aglobally asymptotically stable positive point
Finally for the parameters (74) with 1199087 ge 023 (similarlywhen 1199089 ge 013 or 119898 ge 049) the trajectory of system (3)approaches asymptotically 1198643 = (119904 0) while it approaches1198642 = (119904 0 119910) for data (74) with 1199087 le 015 (similarly when1199089 le 006 or 119898 le 006) as shown in Figure 7 Otherwise thesystem has a globally asymptotically stable positive point
6 Discussion and Conclusions
The dynamics of a refuged prey-predator system involvinginfectious disease in prey species and harvesting from a
Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 13
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 2 Time series for the trajectory of the system (3) using data (74) with typical values of 1199081 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199081 = 055 (b) Trajectories of three species approach asymptotically to 1198642 = (05 0 041) when1199081 = 02
006
02
1
04
Pred
ator
04 08
06
Infected prey
06
Susceptible prey
08
02 04020 0
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 3 System (3) approaches asymptotically to periodic dynamics using data (74) with 1199081 = 01 (a) Periodic attractor in the 119904119910 minusplane(b) Trajectories of the three species approach to periodic in the 119904119910 minusplane
predator species is mathematically simulated through amathematical model consisting of three nonlinear ordinarydifferential equations of the first orderThe existence unique-ness and boundedness of the solution of the proposed modelare discussed analytically All feasible equilibrium points aredetermined and then the local stability analysis for themis carried out The persistence conditions of the system areestablished Suitable Lyapunov functions are used to show theglobal stability of the systemrsquos equilibrium points Finally theproposed dynamical system is solved numerically in order to
confirm the obtained analytical results and specify the controlset of parameters too It is observed that for the hypotheticalset of parameters given by (74) the following results areobtained different sets of parameters values may be used too
(1) For the data (74) system (3) has a globally asymptot-ically stable positive equilibrium point in the interiorof R3+
(2) The system has no periodic dynamics lying in theinterior of R3+ rather it either persists at the positive
14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

14 Journal of Applied Mathematics
05 1 15 20Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 105
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
1 2 3 4 50Time times 10
4
Susceptible preyInfected preyPredator
(b)
05 1 15 20Time
0
02
04
06
08
1
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(c)
0
01
02
03
04
05
06
07
08Po
pula
tions
05 1 15 20Time times 10
4
Susceptible preyInfected preyPredator
(d)
Figure 4 Time series for the trajectory of the system (3) using data (74) with typical values of 1199082 (a) Trajectories of three species approachasymptotically to 1198643 = (01 045 0) when 1199082 = 095 (b) Trajectories of three species approach asymptotically to 1198643 = (066 029 0) when1199082 = 015 (c) Trajectories of three species approach asymptotically to1198641 = (1 0 0)when1199082 = 005 (d) Trajectories of three species approachasymptotically to 1198642 = (065 0 046) when 1199082 = 015 and 1199085 = 048
equilibrium point or else loses its persistence and thesystem approaches asymptotically a specific attractorin the boundary planes
(3) Increasing the half saturation constant representedby 1199081 above 047 leads to losing the persistence ofsystem (3) and the system approaches asymptoticallythe predator free equilibrium point while decreasinghalf saturation constant in the range 015 lt 1199081 le 025makes the solution approaches asymptotically the dis-ease free equilibriumpoint Finally further decreasingof 1199081 below the value 015 leads to losing the stability
of the disease free point and the solution approachesperiodic dynamics in the interior of 119904119910 minusplane
(4) Increasing the infection rate parameter (1199082 ) above thevalue 088 leads to losing the persistence of system(3) too and the solution of system (3) approachesasymptotically the predator free equilibrium pointHowever decreasing the value of this parameter to therange 01 lt 1199082 le 017 makes the system approachesasymptotically either disease free equilibrium pointor predator free equilibrium point depending on thevalues of conversion rates from susceptible prey and
Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 15
05 1 15 2 25 3 35 40Time
0
02
04
06
08
1Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
02
04
06
08
1
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 5 Time series for the trajectory of the system (3) using data (74) with typical values of 1199084 (a) Trajectories of three species approachasymptotically to1198643 = (05 033 0)when1199084 = 025 (b) Trajectories of three species approach asymptotically to1198642 = (1 0 0)when1199084 = 055
05 1 15 20Time
0
01
02
03
04
05
06
07
08
Popu
latio
ns
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 3 35 40Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 6 Time series for the trajectory of the system (3) using data (74) with typical values of 1199085 (a) Trajectories of three species approachasymptotically to 1198642 = (057 0 053) when 1199085 = 05 (b) Trajectories of three species approach asymptotically to 1198643 = (02 053 0) when1199085 = 015
infected prey represented by 1199085 and 1199086 respectivelyFinally decreasing the infection rate further (1199082 le01) leads to approaches to axial equilibrium point1198641
(5) It is observed that varying the parameter 1199083 whichrepresents the ratio of the predatorrsquos attack rate ofinfected prey to predatorrsquos attack rate of susceptibleprey has a quantitative effect on the dynamics of
system (3) and the system still persists at the positiveequilibrium point that depends on the value of 1199083
(6) Increasing the death rate of the infected prey (1199084)so that 02 le 1199084 lt 05 and 05 le 1199084 leadsto losing the persistence of system (3) and thetrajectory of system approaches asymptotically thepredator free equilibrium point and axial equilibrium
16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

16 Journal of Applied Mathematics
05 1 15 2 25 30Time
0
01
02
03
04
05
06
07
08Po
pula
tions
times 104
Susceptible preyInfected preyPredator
(a)
0
01
02
03
04
05
06
07
08
Popu
latio
ns
05 1 15 2 25 30Time times 10
4
Susceptible preyInfected preyPredator
(b)
Figure 7 Time series for the trajectory of the system (3) using data (74) with typical values of 1199087 (a) Trajectories of three species approachasymptotically to 1198643 = (02 053 0) when 1199087 = 03 (b) Trajectories of three species approach asymptotically to 1198642 = (045 0 061) when1199087 = 01
point respectively However the system still persistsat the positive equilibrium point otherwise Similarbehavior of the dynamics has been obtained when thevulnerability constant rate increases above 13 with therest of parameters as in (74)
(7) Now increasing the conversion rate from the suscep-tible prey above1199085 ge 048 or decreasing it below1199085 le025 causes losing of persistence of the system andthe trajectory approaches asymptotically the diseasefree equilibrium point and predator free equilibriumpoint respectively Similar dynamical behavior hasbeen obtained when increasing or decreasing theparameter 1199088 which stands for the half saturationconstant of harvesting in Michael-Mentence harvest-ing function as that obtained in case of increasingor decreasing 1199085 The decreasing of the conversionrate from the infected prey below 065 has the samedynamical effects on system (3) as that obtained withdecreasing 1199085 too
(8) Finally increasing the parameter 1199087 which stands forthe maximum harvesting rate in Michael-Mentenceharvesting function above 023 leads to losing thepersistence of system (3) and the solution approachesasymptotically the predator free equilibrium pointwhile it approaches asymptotically the disease freeequilibrium point with decreasing the parameter 1199087below 015 Similar effect on the dynamical behaviorof system (3) is obtained in case of increasing ordecreasing the refuge rate 119898 and predator death rate1199089 as that effect obtained with varying 1199087
Keeping the above in view it is easy to verify that all theanalytical stability conditions are satisfied for each case in the
above-mentioned point Furthermore the refuge representedby parameter119898 and harvesting represented by parameters1199087and1199088 have a vital effect on the dynamical behavior of system(3) including losing the persistence and moving between thedisease free equilibrium point and predator free equilibriumpoint
Data Availability
No data were used to support this study
Conflicts of Interest
The authors declare that they have no conflicts of interest
References
[1] M R May Stability and Complexity in Model EcosystemsPrinceton University Princeton NJ USA 1973
[2] W O Kermack and A G McKendrick ldquoA contribution to themathematical theory of epidemicsrdquo Proceedings of the RoyalSociety A Mathematical Physical and Engineering Sciences vol115 no 772 pp 700ndash721 1927
[3] R M Anderson and R M May ldquoThe invasion persistenceand spread of infectious diseases within animal and plantcommunitiesrdquo Philosophical Transactions of the Royal Society BBiological Sciences vol 314 no 1167 pp 533ndash570 1986
[4] J Chattopadhyay and O Arino ldquoA predator-prey model withdisease in the preyrdquo Nonlinear Analysis Theory Methods ampApplications vol 36 pp 747ndash766 1999
[5] Z Z Ma F D Chen C Q Wu and W L Chen ldquoDynamicbehaviors of a Lotka-Volterra predator-prey model incorporat-ing a prey refuge and predator mutual interferencerdquo Applied
Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Journal of Applied Mathematics 17
Mathematics and Computation vol 219 no 15 pp 7945ndash79532013
[6] P Jyoti Pal and P K Mandal ldquoBifurcation analysis of a modifiedLeslie-Gower predator-preymodelwithBeddington-DeAngelisfunctional response and strong Allee effectrdquo Mathematics andComputers in Simulation vol 97 pp 123ndash146 2014
[7] R K Naji and S J Majeed ldquoThe dynamical analysis of a prey-predator model with a refuge-stage structure prey populationrdquoInternational Journal of Differential Equations vol 2016 ArticleID 2010464 10 pages 2016
[8] A S Abdulghafour and R K Naji ldquoThe impact of refuge andharvesting on the dynamics of prey-predator systemrdquo ScienceInternational (Lahore) vol 30 no 2 pp 315ndash323 2018
[9] D Greenhalgh Q J Khan and F I Lewis ldquoHopf bifurcation intwo SIRS density dependent epidemic modelsrdquo Mathematicaland Computer Modelling vol 39 no 11-12 pp 1261ndash1283 2004
[10] T Zhang J Liu and Z Teng ldquoStability of Hopf bifurcation ofa delayed SIRS epidemic model with stage structurerdquoNonlinearAnalysis Theory Methods amp Applications vol 11 no 1 pp 293ndash306 2010
[11] P Yongzhen S Li C Li and S Chen ldquoThe effect of constantand pulse vaccination on an SIR epidemicmodel with infectiousperiodrdquo Applied Mathematical Modelling vol 35 no 8 pp3866ndash3878 2011
[12] R K Naji and B H Abdulateef ldquoThe dynamics of SICIRmodel with nonlinear incidence rate and saturated treatmentfunctionrdquo Science International (Lahore) vol 29 no 6 pp 1223ndash1236 2017
[13] M S Rahman and S Chakravarty ldquoA predator-preymodel withdisease in preyrdquoNonlinear Analysis Modelling and Control vol18 no 2 pp 191ndash209 2013
[14] S Jana and T K Kar ldquoModeling and analysis of a prey-predatorsystem with disease in the preyrdquo Chaos Solitons amp Fractals vol47 pp 42ndash53 2013
[15] S Kant and V Kumar ldquoDynamics of a prey-predator systemwith infection in preyrdquo Electronic Journal of Differential Equa-tions vol 2017 no 209 pp 1ndash27 2017
[16] M Haque and E Venturino ldquoIncrease of the prey may decreasethe healthy predator population in presence of a disease inpredatorrdquo HERMIS vol 7 pp 38ndash59 2006
[17] M Haque ldquoA predator-prey model with disease in the predatorspecies onlyrdquo Nonlinear Analysis Real World Applications vol11 no 4 pp 2224ndash2236 2010
[18] K P Das ldquoA mathematical study of a predator-prey dynamicswith disease in predatorrdquo ISRN Applied Mathematics vol 2011Article ID 807486 16 pages 2011
[19] M V R Murthy and D K Bahlool ldquoModeling and Analysis ofa Prey-Predator Systemwith Disease in Predatorrdquo IOSR Journalof Mathematics vol 12 no 1 pp 21ndash40 2016
[20] Y Hsieh and C Hsiao ldquoPredator-prey model with diseaseinfection in both populationsrdquo Mathematical Medicine andBiology vol 25 no 3 pp 247ndash266 2008
[21] K P Das K Kundu and J Chattopadhyay ldquoA predator-preymathematical model with both the populations affected bydiseasesrdquo Ecological Complexity vol 8 no 1 pp 68ndash80 2011
[22] K P Das S K Sasmal and J Chattopadhyay ldquoDisease controlthrough harvesting - conclusion drawn from a mathematicalstudy of a predator-prey model with disease in both the pop-ulationrdquo International Journal of Biomathematics and SystemsBiology vol 1 no 1 pp 1ndash29 2014
[23] SKant andVKumar ldquoStability analysis of predator-prey systemwith migrating prey and disease infection in both speciesrdquoApplied Mathematical Modelling Simulation and Computationfor Engineering and Environmental Systems vol 42 pp 509ndash5392017
[24] N Bairagi S Chaudhuri and J Chattopadhyay ldquoHarvesting asa disease control measure in an eco-epidemiological systemmdashatheoretical studyrdquo Mathematical Biosciences vol 217 no 2 pp134ndash144 2009
[25] R Bhattacharyya and B Mukhopadhyay ldquoOn an eco-epidemiological model with prey harvesting and predatorswitching local and global perspectivesrdquo Nonlinear AnalysisReal World Applications vol 11 no 5 pp 3824ndash3833 2010
[26] S Gakkhar and K B Agnihotri ldquoThe dynamics of diseasetransmission in a prey predator system with harvesting ofpreyrdquo International Journal of Advanced Research in ComputerEngineering and Technology vol 1 pp 229ndash239 2012
[27] Q Yue ldquoDynamics of a modified LesliendashGower predatorndashpreymodel with Holling-type II schemes and a prey refugerdquoSpringerPlus vol 5 no 1 2016
[28] J Ghosh B Sahoo and S Poria ldquoPrey-predator dynamicswith prey refuge providing additional food to predatorrdquo ChaosSolitons amp Fractals vol 96 pp 110ndash119 2017
[29] S Gakkhar and R K Naji ldquoExistence of chaos in two-prey one-predator systemrdquo Chaos Solitons amp Fractals vol 17 no 4 pp639ndash649 2003
[30] C W Clark ldquoAggregation and fishery dynamics a theoreticalstudy of schooling and the Purse Seine tuna fisheriesrdquo NOAAFisheries Bulletin vol 77 no 2 pp 317ndash337 1979
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom