Embed Size (px)
DESCRIPTION
Ch 9.5: Predator-Prey Systems. In Section 9.4 we discussed a model of two species that interact by competing for a common food supply or other natural resource. - PowerPoint PPT Presentation
Citation preview

Ch 9.5: Predator-Prey Systems
In Section 9.4 we discussed a model of two species that interact by competing for a common food supply or other natural resource.
In this section we investigate the situation in which one species (the predator) preys on the other species (the prey), while the prey lives on some other source of food.
For example, foxes and rabbits in a closed forest.
Again we emphasize that a model involving only two species cannot fully describe the complex relationships among species that occur in nature.
Nevertheless, the study of simple models is the first step toward an understanding of more complicated phenomena.

Assumptions
Let x and y be the populations of the prey and predator, respectively, at time t.
We make the following assumptions:In the absence of the predator, the prey grows at a rate proportional to the current population; thus dx/dt = a x, a > 0, when y = 0.
In the absence of the prey, the predator dies out at a rate proportional to the current population; thus dy/dt = -cy, c > 0, when x = 0.
The number of encounters between predator and prey is proportional to the product of their populations. Each such encounter tends to promote the growth of the predator and to inhibit the growth of the prey. Thus the growth rate of the predator is increased by a term of the form xy, while the growth rate of the prey is decreased by a term – xy, where and are positive constants.

Predator-Prey Equations
Thus we have the system of equations
The constants a, c, , are all positive, where a, c are the growth rate of prey and death rate of predator, respectively, and , are measures of the effect of the interaction between the two species.
The predator-prey equations are known as the Lotka-Volterra equations. Although they are rather simple equations, they do characterize a wide class of problems.
Our goal here is to determine the qualitative behavior of the solutions for arbitrary positive initial values x and y.
xcyxycydtdy
yaxxyaxdtdx
/
,/

Example 1: Population Equations (1 of 8)
Consider the system of equations
The critical points are (0,0) and (3,2).
Given below is a direction field for this system of equations, with the critical points indicated as heavy dots.
The trajectories appear to be closed curves surrounding the critical point (3,2).
0,,25.075.0/,5.0/ yxxyydtdyxyxdtdx

Example 1: Critical Point at (0,0) (2 of 8)
For the critical point (0,0), the approximating linear system is
The eigenvalues and eigenvectors are
and hence the general solution for this linear system is
Thus (0,0) is an unstable saddle point of both the linear and nonlinear systems. One trajectory approaches (0,0) along the y-axis, while all other trajectories depart from (0,0).
y
x
y
x
dt
d
75.00
01
1
0,75.0;
0
1,1 )2(
2)1(
1 ξξ rr
tt ececy
x 75.021 1
0
0
1

Example 1: Critical Point at (3,2) (3 of 8)
For the critical point (3,2), the approximating linear system is
The eigenvalues and eigenvectors are
Thus (3,2) is stable center point of the linear system, but is indeterminate for the nonlinear systems, by Theorem 9.3.2.
To find the trajectories for the linear system, we have
2
3,
05.0
5.10
y
x
v
u
v
u
v
u
dt
d
3/
1,
2
3;
3/
1,
2
3 )2(2
)1(1 i
ir
i
ir ξξ
v
u
v
u
du
dv
dtdu
dtdv
35.1
5.0
/
/

Example 1: Critical Point at (3,2) (4 of 8)
Near the critical point (3,2), we thus have
The solution to this separable equation is
Thus the trajectories of the linear system are ellipses centered at the critical point (3,2), and are elongated horizontally.
Returning to the nonlinear system
we have
vududv 3//
0,3 22 kkvu
0,,25.075.0/,5.0/ yxxyydtdyxyxdtdx
xyx
xyy
dx
dy
5.0
25.075.0

Example 1: Critical Point at (3,2) (5 of 8)
Thus
The solution to this separable equation is
It can be shown that the graph of this equation, for a fixed c, is a closed curve about the point (3,2).
Thus the critical point (3,2) is also a center of our nonlinear system, and hence the predator and prey populations exhibit a cyclic variation about the equilibrium solution (3,2).
This behavior is seen in the phase portrait on the next slide.
cxyyx 25.05.0lnln75.0
dx
x
xdy
y
y
yx
xy
dx
dy 25.075.05.01
5.01
25.075.0

Example 1: Phase Portrait (6 of 8)
Given below is a phase portrait for our nonlinear system.
For some initial conditions, the trajectories represent small variations in x and y about (3,2), and are almost elliptical in shape, as the linear analysis suggests.
For other initial points, the oscillations in x and y are more pronounced, and the shape of the trajectories are significantly different from an ellipse.
Note that the trajectories are traversed counterclockwise.

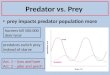
Example 1: Population Equations (7 of 8)
A phase portrait along with population graphs x(t) and y(t), for a typical set of initial conditions, are given below.
Note from both of these figures that the oscillation of the predator population lags behind that of the prey.

Example 1: Population Equations (8 of 8)
Starting with a state in which both populations are relatively small, the prey first increase because of little predation.
Then the predators, with abundant food, increase in population.
This causes heavy predation, and the prey tend to decrease.
Finally, with a diminished food supply, the predator population also decreases, and the system returns to original state.

General Predator-Prey Equations (1 of 7)
The general system of equations
can be analyzed in the same way as in Example 1.
The critical points are the solutions of the equations
yielding the points (0,0) and (c/, a/).
We next examine the solutions of the corresponding linear system near each critical point.
xcyxycydtdy
yaxxyaxdtdx
/
,/
,0,0 xcyyax

General System: Critical Point at (0,0) (2 of 7)
For the critical point (0,0), the approximating linear system is
The eigenvalues and eigenvectors are
and hence the general solution for this linear system is
Thus (0,0) is an unstable saddle point of both the linear and nonlinear systems. One trajectory approaches (0,0) along the y-axis, while all other trajectories depart from (0,0).
y
x
c
a
y
x
dt
d
0
0
1
0,;
0
1, )2(
2)1(
1 ξξ crar
tcta ececy
x
1
0
0
121

Critical Point at (c/, a/): Linear System (3 of 7)
For the critical point (c/, a/), the linear system is
The eigenvalues are
Thus (c/, a/) is stable center point of the linear system, but is indeterminate for the nonlinear systems, by Theorem 9.3.2.
To find the trajectories for the linear system, we have
/
/,
0/
/0
ay
cx
v
u
v
u
a
c
v
u
dt
d
aciracir 21 ,
vc
ua
vc
ua
du
dv
dtdu
dtdv2
2
)/(
)/(
/
/

Critical Point at (c/, a/): Ellipses (4 of 7)
Near the critical point (c/, a/), we thus have
The solution to this separable equation is
Thus the trajectories of the linear system are ellipses centered at the critical point (c/, a/).
Returning to the nonlinear system
we have yax
xcy
dx
dy
0222
2
dvvcduuavc
ua
du
dv
0,2222 kkvcua
xcydtdyyaxdtdx /,/

Critical Point at (c/, a/): Nonlinear System (5 of 7)
Thus
The solution to this separable equation is
It can be shown that the graph of this equation, for a fixed C, is a closed curve about the point (c/, a/).
Thus the critical point (c/, a/) is also a center of our nonlinear system, and hence the predator and prey populations exhibit a cyclic variation about (c/, a/).
Cxxcyya lnln
dx
x
xcdy
y
ya
yax
xcy
dx
dy

Critical Point at (c/, a/): Small Deviations and Linear System (6 of 7)
The cyclic variation of the predator and prey populations can be analyzed in more detail when the deviations from the point (c/, a/) are small and the linear system can be used.
The solution of the linear system
can be written in the form
where the constants K and are determined by the initial conditions.
v
u
a
c
v
u
dt
d
0/
/0
tacKa
catvtacK
ctu sin)(,cos)(

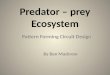
Critical Point at (c/, a/): Small Deviations and Elliptical Approximation (7 of 7)
The equations below are good approximations to the nearly elliptical trajectories near (c/, a/).
We can use them to draw several conclusions about the cyclic variation of the predator and prey on such trajectories:
The predator and prey population sizes vary sinusoidally with period 2 /(ac)½. This oscillation period is independent of initial conditions. The predator and prey populations are out of phase by one-quarter of a cycle. The prey leads and the predator lags.The amplitudes of oscillations are Kc/ for the prey, and (c/a)½Ka/ for the predator, and hence depend on initial conditions and parameters.The average predator and prey populations over one complete cycle are c/ and /a, respectively – same as equilibrium populations.
tacKa
catvtacK
ctu sin)(,cos)(

Modified Predator-Prey Equations
Cyclic variations of predator and prey, as predicted by our equations, have been observed in nature; see text.
One criticism of the Lotka-Volterra equations is that in the absence of the predator, the prey will grow without bound.
This can be corrected using a logistic model for x when y = 0.
As a result of this modification, the critical point at (c/, a/) moves to (c/, a/ - c/ ) and becomes an asymptotically stable point. It is either a node or a spiral point, depending on the parameters in the differential equations.
In either case, other trajectories are no longer closed curves but approach the critical points as t .