Embed Size (px)
DESCRIPTION
Free body diagram, Equilibrium equations and applications. Plane truss, perfect and imperfect truss, assumption in the truss analysis, analysis of perfect plane trusses by the method of joints, method of section.
Citation preview


Contents
Force 2
Force System Classification 2
Resolution of Forces 2
Laws of Forces 2
Triangular Law 3
Parallelogram Law 3
Polygon Law of Forces 4
Moment of Force 6
Varignon’s Theorem 6
Lami’s Theorem 7
Trusses - Formed Structures 8
Support Reactions 8
Analysis of a Frame 9
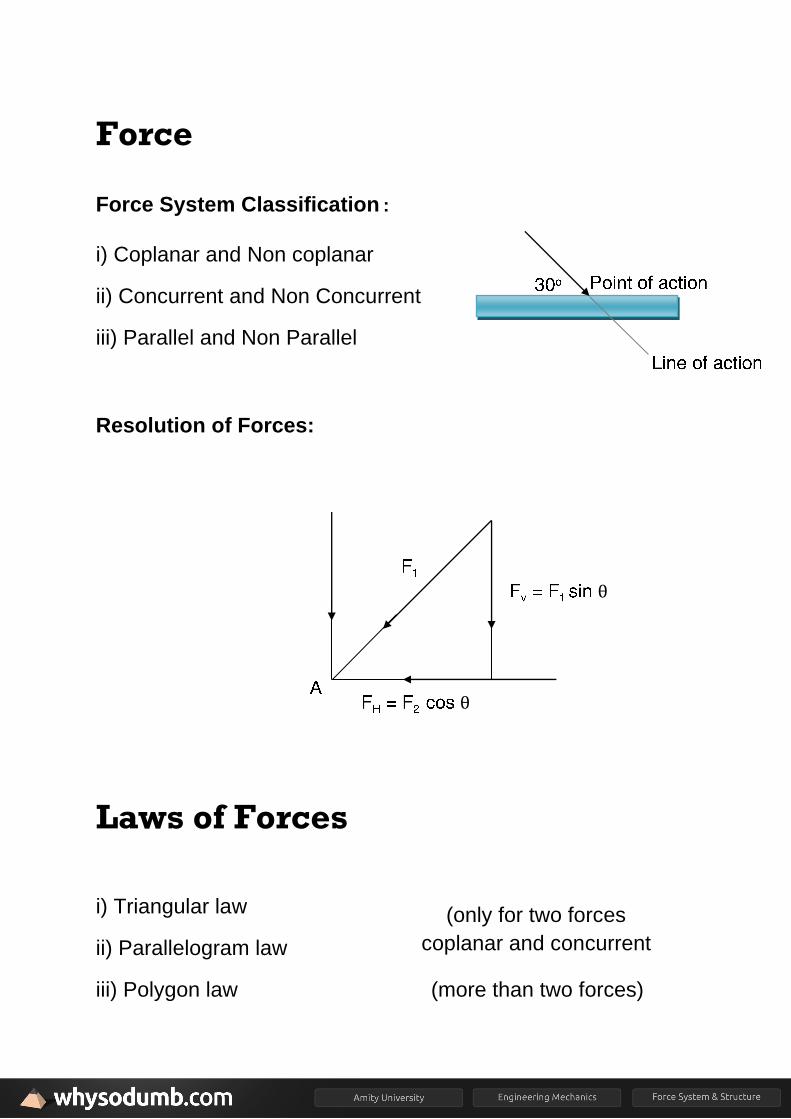
Force
Force System Classification :
i) Coplanar and Non coplanar
ii) Concurrent and Non Concurrent
iii) Parallel and Non Parallel
Resolution of Forces:
Laws of Forces
i) Triangular law
ii) Parallelogram law
iii) Polygon law (more than two forces)
θ
θ
(only for two forces
coplanar and concurrent
)

Triangular Law
F1 = 10 N F2 = 5 N = 30o
Scale consideration 1 N = 1cm
F1 = 10 cm F2 = 5 cm
We can find the value of R (resultant) & directly proportional to
𝛼 (direction) by measuring.
Parallelogram Law:
𝜃 𝛼
𝜃 𝛼
𝜃
𝜃
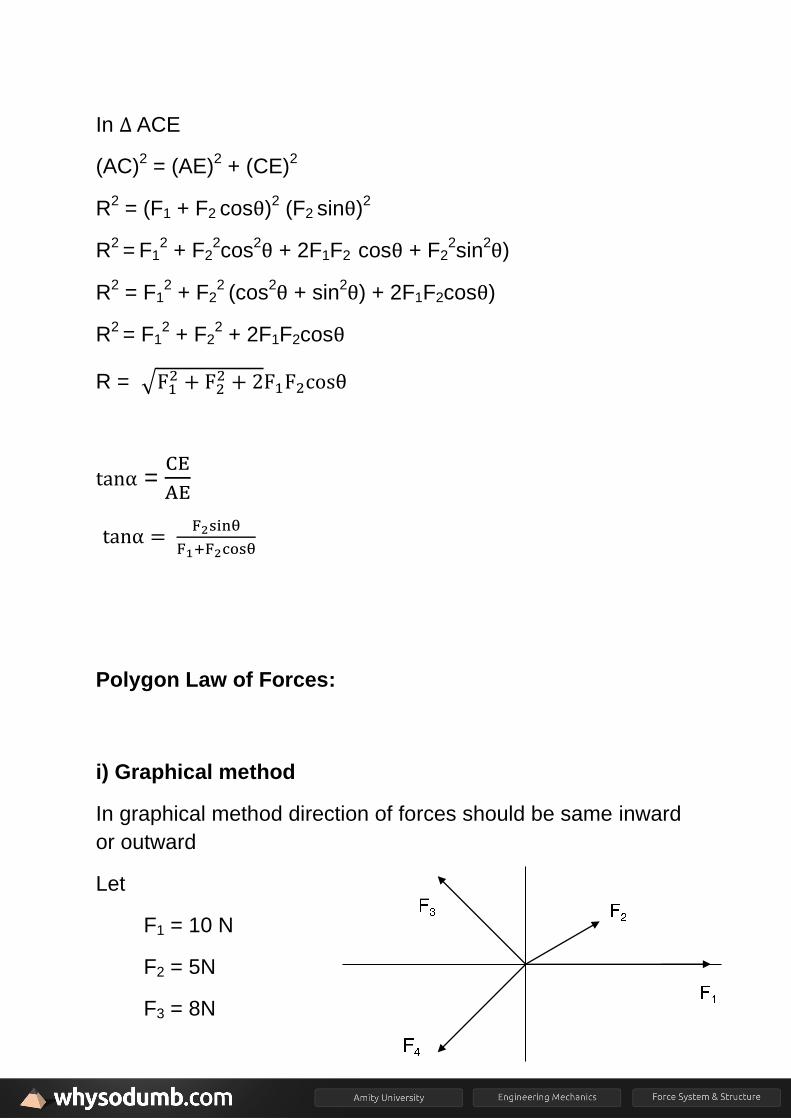
In ACE
(AC)2 = (AE)
2 + (CE)
2
R2 = (F1 + F2 cos )
2 (F2 sin )
2
R2 =
F1
2 + F2
2cos
2 + 2F1F2 cos + F22sin
2 )
R2 = F1
2 + F2
2 (cos
2 + sin2 ) + 2F1F2cos )
R2
= F12 + F2
2 + 2F1F2cos
R = √
=
Polygon Law of Forces:
i) Graphical method
In graphical method direction of forces should be same inward
or outward
Let
F1 = 10 N
F2 = 5N
F3 = 8N

F4 = 7N
Scale consideration 1 N = 1cm
F1 = 10cm F2 = 5cm F3 = 8cm F4 = 7cm
ii) Analytical method
R2 = √ ∑ ∑
∑
∑
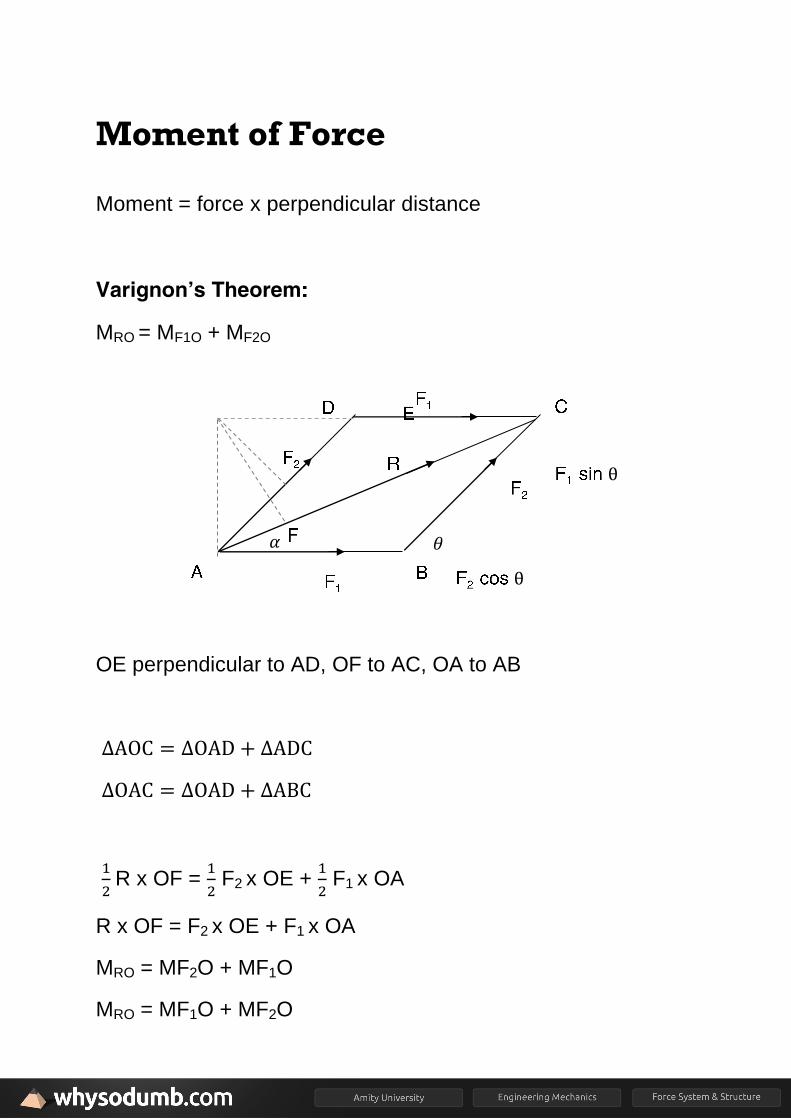
Moment of Force
Moment = force x perpendicular distance
Varignon’s Theorem
MRO = MF1O + MF2O
OE perpendicular to AD, OF to AC, OA to AB
R x OF =
F2 x OE +
F1 x OA
R x OF = F2 x OE + F1 x OA
MRO = MF2O + MF1O
MRO = MF1O + MF2O
𝜃 𝛼
θ
θ

Lami’s Theorem:
Lami’s theorem is applicable only when there are three
coplanar concurrent forces equilibrium state.
P
Q
R
=
𝛼 𝛽
𝛾

Trusses - Formed Structures
M = 2j – 3 (m = members j = joints)
i) Perfect m = 2j – 3
ii) Deficient m < 2j – 3
iii) Reductant m = 2j – 3
Support Reactions
There are three types of supports:
i) Simply supported / fixed R = R =
ii) Roller supported R = perpendicular to the contact
surface
iii) Hinged supported R = Rh

Analysis of a Frame
i) The reaction at the supporters
ii) The internal stresses induced in the member due to external
loads.
Sign convention for the member under a tensile force
If the forces are pulling at the ends
Tensile force
If the forces are pushing at each other
Compressive
Principles that help to identify the member not subjected
to any force when the truss is loaded
i) A single force cannot form a system in equilibrium this implies that if
there is only one force acting on a point then for the equilibrium of this
joint this force equal zero.
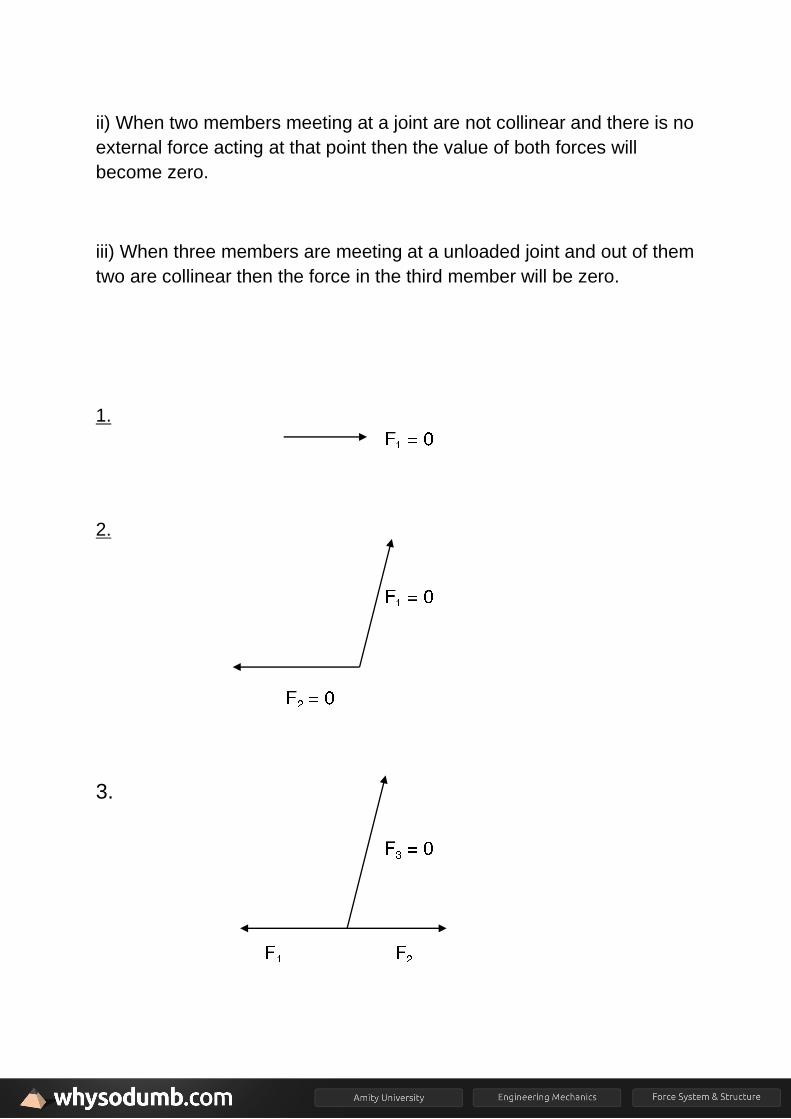
ii) When two members meeting at a joint are not collinear and there is no
external force acting at that point then the value of both forces will
become zero.
iii) When three members are meeting at a unloaded joint and out of them
two are collinear then the force in the third member will be zero.
1.
2.
3.