Embed Size (px)
Citation preview

Slide 1 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Embedded Systems and Software
A Simple Introduction to Embedded Control
Systems (PID Control)

Slide 2 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Acknowledgements
• The material in this lecture is adapted from:
– F. Vahid and T. Givargis, Embedded System Design—A Unified
Hardware/Software Introduction, John Wiley & Sons, 2002
(Chapter 9)
– T. Wescott, “PID Without a PhD”
http://www.embedded.com/2000/0010/0010feat3.htm

Slide 3 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Control System Terminology
• Control physical system (plant) output
– By setting plant’ input
• Examples
– Cruise control, thermostat, disk drive, chemical processes
• Difficulty due to
– Disturbance: wind, road, tire, brake; opening/closing door…
– Human interface: feel good, feel right…

Slide 4 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
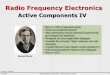
Control System Tracking
Reference Input a.k.a. Set Point
where we want the output to be
For example, here the user turned
up the thermostat
This how the system tracks the
reference input or set point
Slide 5 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Control System Tracking
Reference Input a.k.a. Set Point
where we want the output to be
For example, here the user turned
up the thermostat
This how the system tracks the
reference input or set point

Slide 6 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Plant
– Physical system to be controlled: car, plane, disk, heater,…
• Actuator
– Device to control the plant: throttle, wing flap, disk motor,…
• Controller
– Designed product to control the plant
Open-Loop Control Systems

Slide 7 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Output (𝒗𝒕)
– What we are interested in: speed, disk location, temperature
• Reference Input / Set Point (𝒓𝒕)
– Desired output: speed, desired location, desired temperature
• Disturbance (𝒘𝒕)
– Uncontrollable input to the plant imposed by environment
Wind, bumping the disk drive, door opening
Open-Loop Control Systems
7

Slide 8 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Feed-forward control
• Delay in actual change of the output
• Controller doesn’t know how well things are going
• Simple
• Best use for predictable systems
– Examples?
Characteristics of Open Loop Control

Slide 9 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Closed Loop Control System
Control Law: 𝑢𝑡 = 𝐹 𝑒𝑡
Plant Model
System Model
𝑣𝑡+1 = 𝐹(𝑣𝑡 , 𝑢𝑡 , 𝑤𝑡)
𝑣𝑡+1 = 𝐹(𝑣𝑡 , 𝑢𝑡 , 𝑤𝑡) Goal: minimize tracking error 𝑒𝑡
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = 𝐹 𝑒𝑡 𝑣𝑡 𝑢𝑡
Slide 10 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
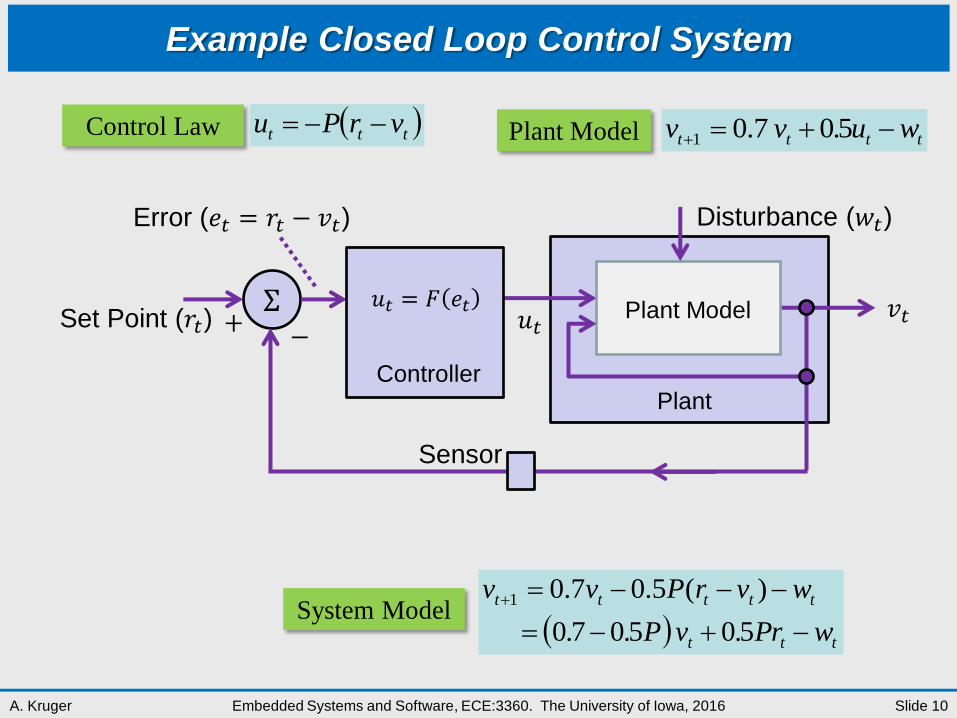
Example Closed Loop Control System
ttt vrPu tttt wu.vv 507.01
ttt
ttttt
wPr.vP..
wvrPvv
505070
)(5.07.01
Plant Model
System Model
Control Law
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = 𝐹 𝑒𝑡 𝑣𝑡 𝑢𝑡

Slide 11 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Model of the Plant
Counter-intuitively, it may not necessary to (accurately) model the plant
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = 𝐹 𝑒𝑡 𝑣𝑡 𝑢𝑡
However, even a simple model can be very helpful

Slide 12 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Model the car speed at 𝑡 + 1 as a linear combination of
the speed at t (i.e., 𝑣𝑡) and the throttle at 𝑡 (i.e., 𝑢𝑡) vt+1 = Avt + But
Next, experimentally determine the model parameters A and B. On flat surface at 50 mph,
open the throttle to 40 degrees. Then measure the speed after one time unit. Assume the
speed is 55 mph. Then
55 = 50A + 40B
Repeat the experiment, but now start at 65 mph and with the throttle at 50 degrees.
Assume the resulting speed after one time unit is 70.5 mph. Then
70.5 = 65A + 50B
One can now solve these two equations for the two unknowns 𝐴 and 𝐵, to find 𝐴 = 0.7 and 𝐵 = 0.5.
One can repeat the experiment many times and determine, say, average values for 𝐴 and
𝐵. (There are more optimum techniques for dealing with multiple 𝐴s and 𝐵s). Regardless,
we now have model for the car (plant).
vt+1 = 0.7vt + 0.5ut
Example

Slide 13 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Closed-Loop Control
BABBAvABBABvAABvAv 2
0
3
0
2
23
ttt
ttttt
wPr.vP..
wvrPvv
505070
)(5.07.01
ttt vrPu tttt wu.vv 507.01
BvAv tt 1
005.0,5.07.0 wPrBPA
BvAv 01
BABvABBvAABvAv 0
2
012
BAAvAv nnn
n 121
0
Consider fixed set point and fixed disturbance
001 505070 wPr.vP..v tt
00
21
0 5.015.07.05.07.05.07.0 wPrPPvPvnnn
n
Plant model Control Law (feedback)

Slide 14 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Tuning Performance: Finding Proper P
00
21
0 5.015.07.05.07.05.07.0 wPrPPvPvnnn
n
To obtain convergence requires 15.07.0 P 4.36.0 P
To avoid oscillation requires 05.07.0 P 4.1 P
Reduce the effect of initial conditions (v0), make (0.7-0.5P) as small as possible 4.1 P
001 505070 wPr.vP..v tt 450 tt vrPu
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = −𝑃 𝑒𝑡 𝑣𝑡 𝑢𝑡

Slide 15 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Steady state means vss = vt + 1 = vt 00505070 wPr.vP..v ssss
P
wr
P
Pvss
5.03.05.03.0
5.0 00
To get vss as close as possible to r0, (perfect tracking) let P ∞
00
21
0 5.015.07.05.07.05.07.0 wPrPPvPvnnn
n
001 505070 wPr.vP..v tt 450 tt vrPu
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = −𝑃 𝑒𝑡 𝑣𝑡 𝑢𝑡

Slide 16 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Tuning Performance: Finding Proper P
To obtain convergence requires 15.07.0 P 4.36.0 P
To avoid oscillation requires 05.07.0 P 4.1 P
Reduce the effect of initial conditions (v0), make (0.7-0.5P) as small as possible 4.1 P
To get vss as close as possible to r0, (perfect tracking) let P ∞
Finally, pick 3.3P stable, fast, good tracking, but some oscillation
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = −𝑃 𝑒𝑡 𝑣𝑡 𝑢𝑡

Slide 17 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
0 10 20 30 40 50 600
10
20
30
40
50
60
70
Control Point (i.e., time)
Sp
ee
d (
mp
h)
Analyze Controller Performance
0 mph,50 mph,20 00 wrv t
01 505070 Pr.vP..v tt
01 )3.3(50)3.3(5070 r.v..v tt
5.8295.01 tt vv
tt vrPu 0 tt vu 503.3
Valid range for controller is 0-45o. Thus, with
this P, the actuator saturates.
Tracking error ~ 8 mph
Significant oscillation
3.3P
Slide 18 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
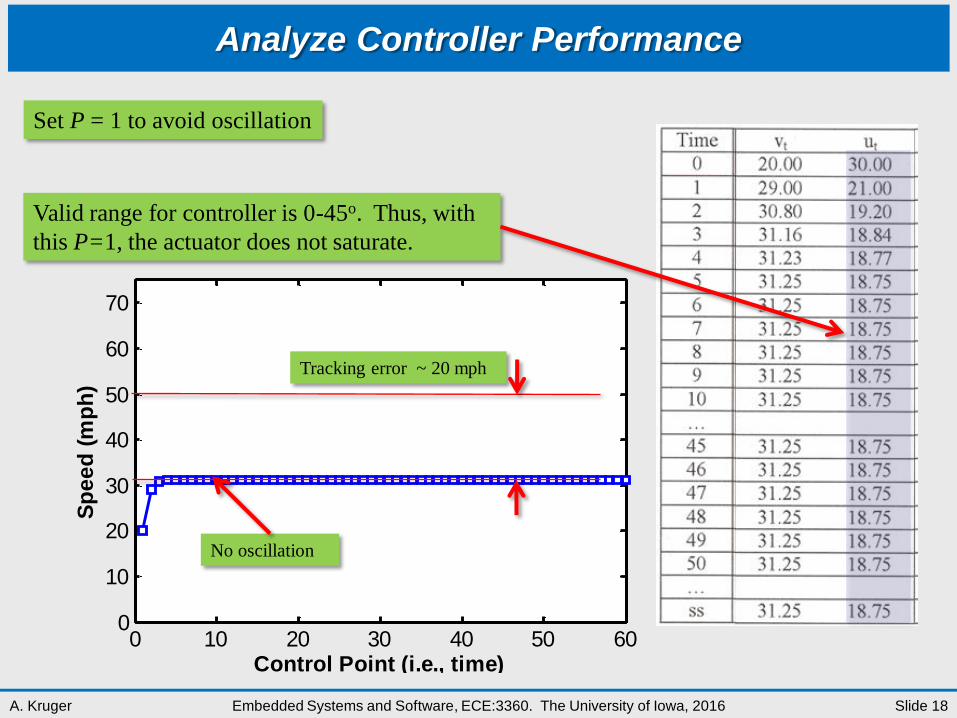
Analyze Controller Performance
0 10 20 30 40 50 600
10
20
30
40
50
60
70
Control Point (i.e., time)
Sp
ee
d (
mp
h)
Tracking error ~ 20 mph
No oscillation
Valid range for controller is 0-45o. Thus, with
this P=1, the actuator does not saturate.
Set P = 1 to avoid oscillation

Slide 19 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Analyzing the Controller
0 10 20 30 40 50 600
10
20
30
40
50
60
70
Control Point (i.e., time)
Sp
ee
d (
mp
h)
P = 1.0
P = 3.3 P = 2.5
Set point (where we want to be)

Slide 20 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Closed-Loop Performance
0 10 20 30 40 50 600
10
20
30
40
50
60
70
Control Point (i.e., time)
Sp
ee
d (
mp
h)
P = 3.3, W =+5 P = 3.3, W =0
P = 3.3, W = - 5
0 mph,50 mph,20 000 wrv
01 505070 Pr.vP..v tt
01 )3.3(50)3.3(5070 r.v..v tt
01 5.8295.0 wvv tt
Change is 5 mph compared to 66-
33 = 33 mph for open-loop control

Slide 21 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Objective
– Causing output to track a reference even in the presence of
Measurement noise
Model error
Disturbances
• Metrics
– Stability
Output remains bounded
– Performance
How well an output tracks the reference
– Disturbance rejection
– Robustness
Ability to tolerate modeling error of the plant
General Control System

Slide 22 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Performance (generally speaking)
• Rise time – Time it takes
from 10% to 90%
• Peak time
• Overshoot – Percentage by
which Peak exceed final value
• Settling time – Time it takes to
reach 1% of final value

Slide 23 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Difficult
• May need to be done first
• Plant is usually on continuous time
– Not discrete time. For example, car speed continuously reacts to
throttle position, not at discrete interval
– Sampling period must be chosen carefully to ensure “nothing
interesting” happens in between sampling intervals
• Plant is usually non-linear
– For example, shock absorber response may need to be 8th order
differential equation
• Iterative development of the plant model and controller
– Have a plant model that is “good enough”
Plant Modeling

Slide 24 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Controller Design: “P”
tt vrPu 0Proportional control - multiplies the tracking error with a constant P
P affects
Stability
Tracking
Disturbance rejection
Large P can lead to overshoot and oscillation
Make P large to reduce tracking error
Make P large to improve disturbance rejection
001 505070 wPr.vP..v tt Closed-loop model with linear plant
Σ −
+
Sensor
Controller Plant
Plant Model Set Point (𝑟𝑡)
Disturbance (𝑤𝑡) Error (𝑒𝑡 = 𝑟𝑡 − 𝑣𝑡)
𝑢𝑡 = −𝑃 𝑒𝑡 𝑣𝑡 𝑢𝑡

Slide 25 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
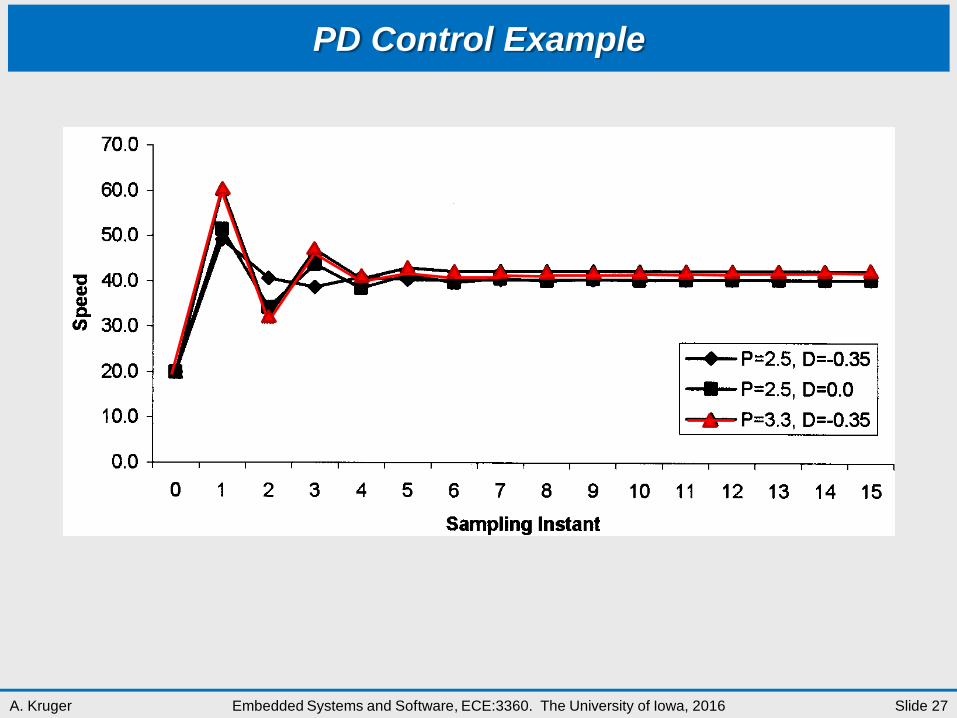
Controller Design: “PD”
Proportional and Derivative control - P control, and also consider error over time
Intuitively
Want to “push” more if error is not reducing fast enough
Want to “push” less if error is reducing really fast
11 ttttttt vrvrDvrPu
1 tttt eeDPeu

Slide 26 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
PD Controller
1 tttt eeDPeu
tttt wu.vv 507.01 Plant model
Control Law (feedback)
ttttttttt wvrvrDvrP.vv 111 507.0
ttt vre
ttttttt wDrrDPDvvDP.vv 111 5.05.05.0507.0
05.07.01
5.0r
P
Pvss
Assume reference input and disturbance are constant, then the steady-state speed is
P can be set for best tracking and disturbance control
Then D can be set to control transient behavior
Does not depend on D
Steady state means vss = vt + 1 = vt
Slide 27 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
PD Control Example
Slide 28 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
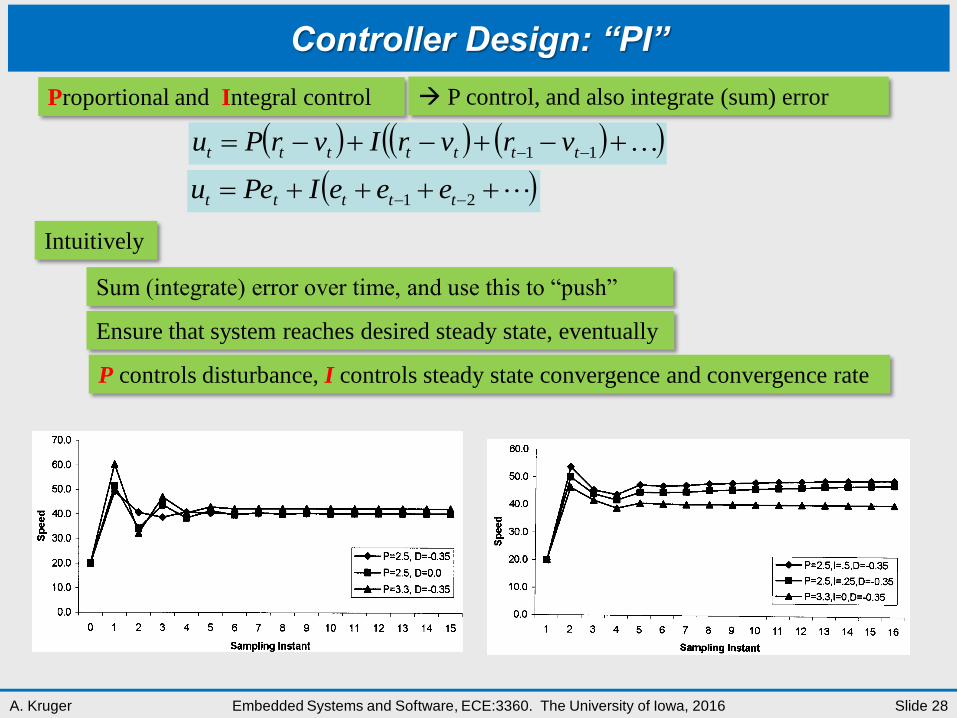
Controller Design: “PI”
Proportional and Integral control P control, and also integrate (sum) error
Intuitively
Sum (integrate) error over time, and use this to “push”
Ensure that system reaches desired steady state, eventually
11 ttttttt vrvrIvrPu
21 ttttt eeeIPeu
P controls disturbance, I controls steady state convergence and convergence rate

Slide 29 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Controller Design: “PID”
Proportional , Integral and Derivative control - use all 3 types of control
Intuitively
P considers current error, controls disturbance
I controls long-term error, controls steady state convergence and convergence rate
1111 ttttttttttt vrvrDvrvrIvrPu
121 ttttttt eeDeeeIPeu
D considers how error is changing, controls transient response

Slide 30 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Examples

Slide 31 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• More than 90% of all controllers
used in process industries are PID
controllers.
• A typical chemical plant has 100s
or more PID controllers.
• PID controllers are widely used in:
– Chemical plants
– Oil refineries
– Pharmaceutical industries
– Food industries
– Paper mills
– Electronic equipments
Application of PID Control

Slide 32 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Off-The-Shelf PID Controllers
There are many off-the-shelf PID controllers available

Slide 33 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Block Diagram View of PID Controller

Slide 34 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Another Block Diagram View of PID Controller
Set desired input

Slide 35 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Another Block Diagram View of PID Controller
Compare actual output against set point

Slide 36 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Another Block Diagram View of PID Controller
Use part of the error signal

Slide 37 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Another Block Diagram View of PID Controller
Use sum of the previous errors

Slide 38 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Another Block Diagram View of PID Controller
Use rate of change of errors

Slide 39 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Another Block Diagram View of PID Controller
Update the process, and repeat

Slide 40 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Sidebar: Analog PID Controller
Integral
Proportional
Derivative
Summer

Slide 41 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
PID Pseudo Code
previous_error = 0
integral = 0
start:
get actual_position
error = setpoint - actual_position
integral = integral + error*dt
derivative = (error - previous_error)/dt
output = P*error + I*integral + D*derivative
previous_error = error
wait(dt)
goto start

Slide 42 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
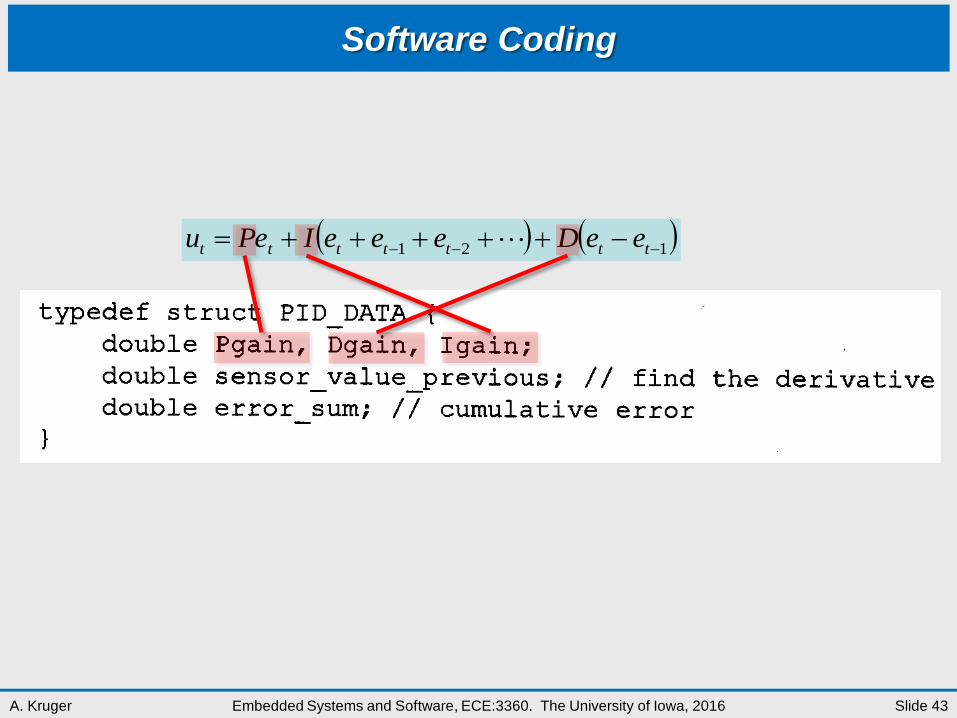
• Main function loops forever, during each iteration
– Read plant output sensor (may require ADC)
– Read current desired reference input (set point)
– Call a routine PidUpdate, to determine actuator value
– Set actuator value (may require DAC)
Software Coding
Slide 43 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Software Coding
121 ttttttt eeDeeeIPeu

Slide 44 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Computation
121 ttttttt eeDeeeIPeu

Slide 45 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Analytically deriving P, I, D may not be possible
– E.g., plant not is not available, or to costly to obtain
• Ad hoc method for getting “reasonable” P, I, D
– Start with a small P, I = D = 0
– Increase D, until seeing oscillation, then reduce D a bit
– Increase P, until seeing oscillation, then D a bit
– Increase I, until seeing oscillation
• Iterate until one can change anything without excessive
oscillation
PID Tuning

Slide 46 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Quantization
• Overflow
• Aliasing
• Computation Delay
Practical Issues with Computer-Based Control

Slide 47 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Quantization & Overflow
• Quantization – E.g., can’t store 0.36 as 4-bit fractional number
– Can only store 0.75, 0.59, 0.25, 0.00, -0.25, -050,-0.75, -1.00
– Choose 0.25
– Results in quantization error of 0.11
• Sources of quantization error – Operations, e.g., 0.50*0.25=0.125
Can use more bits until input/output to the environment/memory
– ADC resolution
• Overflow – Can’t store 0.75 + 0.50 = 1.25 as 4-bit fractional number
• Solutions – Use fix-point representation/operations carefully
Time-consuming
– Use floating-point co-processor Costly

Slide 48 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Aliasing Example
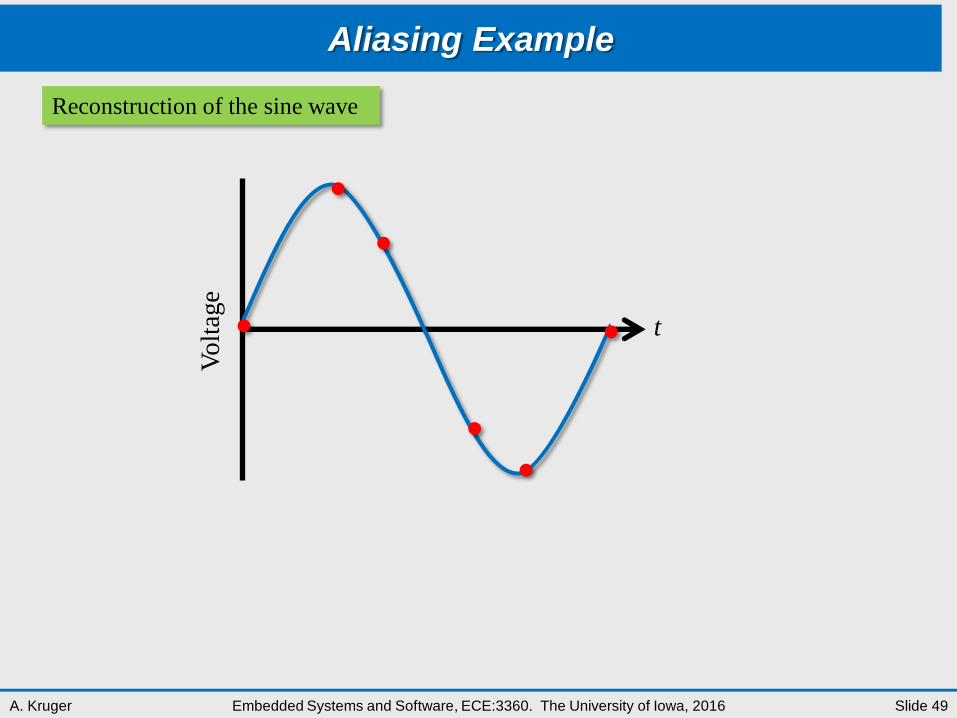
The points below are the samples from a sine wave
t
Vo
ltag
e
Slide 49 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Aliasing Example
Reconstruction of the sine wave
t
Vo
ltag
e

Slide 50 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Aliasing Example
But why not this reconstruction?
t
Vo
ltag
e
Slide 51 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
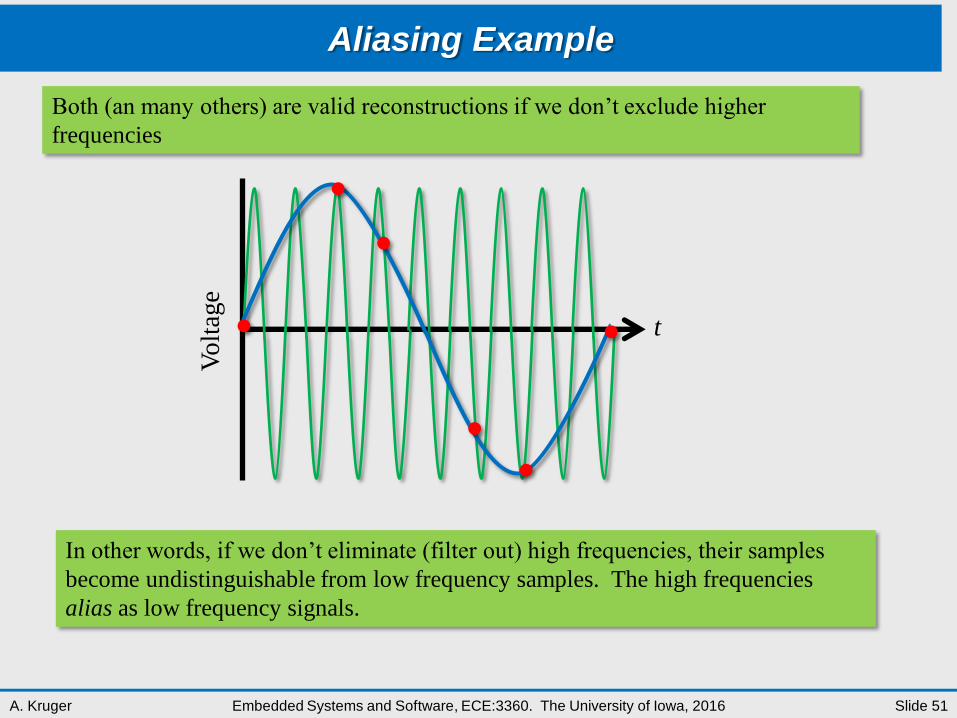
Aliasing Example
Both (an many others) are valid reconstructions if we don’t exclude higher
frequencies
In other words, if we don’t eliminate (filter out) high frequencies, their samples
become undistinguishable from low frequency samples. The high frequencies
alias as low frequency signals.
t
Vo
ltag
e

Slide 52 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
Aliasing Example
Sampling at 2.5 Hz (period = 0.4 s) the following signals are indistinguishable
tty 6sin)(
tty sin)(
Frequency f = 3 Hz
Frequency f = 0.5 Hz
In fact, with sampling frequency of 2.5 Hz one can only correctly sample signal
below the Nyquist frequency 2.5/2 = 1.25 Hz.

Slide 53 Embedded Systems and Software, ECE:3360. The University of Iowa, 2016 A. Kruger
• Inherent delay in processing
– Actuation occurs later than expected
• Need to characterize implementation delay to make sure
it is negligible
• Hardware delay is usually easy to characterize
– Synchronous design
• Software delay is harder to predict
– Should organize code carefully so delay is predictable and
minimized
– Write software with predictable timing behavior (be like hardware)
Time Trigger Architecture
Synchronous Software Language and/or RTOS
Computation Delay