Embed Size (px)
Citation preview

MATHEMATICAL
COMPUTER MODELLING
PERGAMON Mathematical and Computer Modelling 29 (1999) 49-63
A Minimal Model of Pattern Formation in a Prey-Predator System
S. V. PETROVSKII Shirshov Institute of Oceanology, Russian Academy of Sciences
Nakhimovsky Prospect, 36, Moscow 117218, Russia oceantheolabQglas.apc.org
H. MALCHOW* Institute of Environmental Systems Research
Department of Mathematics and Computer Science, University of Osnabriick Artilleriestr. 34, D-49069 Osnabriick, Germany
malchowQusf .uni-osnabrueck .de
(Received and accepted October 1998)
Abstract-The spatio-temporal dynamics of a prey-predator community is described by two reaction-diffusion equations. It is shown that for a class of initial conditions the spatio-temporal system dynamics resembles a “phase transition” between a regular and an irregular phase, separated by a moving boundary. A simple approach to specify spatio-temporal chaos is proposed. @ 1999 Elsevier Science Ltd. All rights reserved.
Keywords-Predator-prey interactions, Reaction-diffusion system, Diffusive wave propagation, Chaotic oscillations, Patchiness.
1. INTRODUCTION
The problem of pattern formation is, perhaps, the most challenging in modern ecology, biology,
chemistry, and many other fields of science. No real system is actually homogeneous. Sometimes,
however, the inhomogeneity in the spatial distribution of system components appears in the form
of very “sharp contrast” structures, even if the system parameters show no significant dependence
on coordinates. The reasons causing this “patchiness” are still obscure. Because of the physical
mechanisms underlying pattern formation in many cases are poorly understood as well, the
question of a minimal model to describe chaotic dynamics of a system is still open.
Since the paper by Turing [l] (cf. [2]) ‘t 1 is widely known that stationary patterns can arise in a
homogeneous two-component reaction- diffusion system as a result of linear “diffusive instability”
under one limitation: the values of the two diffusivities must not be equal [3]. However, this clas-
sical result is often understood in the incorrect way that no pattern can arise in a two-component
reaction-diffusion system with equal diffusivities. This conclusion usually makes researchers to
*Author to whom all correspondence should be addressed. This work is partially supported by INTAS Grant No. 96-2033, by NATO Linkage Grant No. OUTRG.LG971248, by DFG Grant No. 436 RUS 113/447 and by RFBR Grant No. 98-04-04065.
0895-7177/99/$ - see front matter. @ 1999 Elsevier Science Ltd. All rights reserved. PII: SO895-7177(99)00070-9
Typeset by d--W

50 S. V. PETROVSKII AND H. MALCHOW
build somewhat more complicated models, e.g., either including into consideration additional
components [4-6] or considering spatial inhomogeneity of system parameters [7].
In fact, these conclusions are not necessary. The system stability with respect to small per-
turbations by no means excludes a possible system instability due to a perturbation of finite
amplitude. There is also another reason. In their search for patterns, most authors investigate
the evolution of a nonlinear system, starting with a homogeneous initial distribution of the com-
ponents. However, the dynamics of the system can be principally different for initial conditions
of different type. For instance, co~idering the problem of biological invasion, Sherratt et al. (8j
showed that both regular and irregular patterns can arise in a distributed prey-predator system
when the initial distribution of predator population is described by a finite function. However,
many authors (cf. [9]) still regard two-component prey- predator models as far too simple to de-
scribe any essential feature of real biological communities, particularly, to give an explanation of
the patchy spatial distribution. In fact, this is not so. In this paper, we show that the formation
of irregular patterns in a prey-predator system is rather typical and should not be considered
as just an exotic example attributed to a particular form of initial distribution. Moreover, the
phenomenon of patchiness itself, in fact, may be treated as an intrinsic property of prey-predator
interactions.
In this paper, we investigate numerically the 1-D spatial-temporal dynamics of a predator-prey
system with logistic growth of the prey and Holling type-II functional response of the predator.
At the beginning of the process both populations are distributed over the domain at the density
levels corresponding to approximately the stationary state of the system. We obtain that in such
a system even small pe~urbations may lead to the formation of irregular patterns. This “chaotic
regime” first occupies only a certain spatial region in the system and can coexist with a “regular
regime” during a considerably long period. Finally, however, irregular oscillations prevail and
invade the whole system. We also show that, in spite of the regime of irregular oscillations being
rather persistent, it can be dumped by an increase of the diffusivities. Then, the formation of the
“chaotic phase” is only possible if the size of the region occupied by the prey-predator community
is greater than a certain critical value.
2. MODEL EQUATIONS
The spatio-temporal functioning of a prey-predator community is usually described by the
following equations [lO,ll]:
ut = &WC, + f(%V>, 0)
% = ~27h5 + 9(%V)* (2)
The considerations are restricted to the 1-D case. U(Z, t) and ~(2, t) are the densities of prey and
predator populations at position z and time t, Q and Ds are diffusivities, subscripts stand for
partial derivatives, functions f(u, u) and g(u, V) describe the local kinetics of the system. Due to
biological reasons, these functions have the following structure:
f(u, v) = P(u) - E(u, u) , (3)
g(zL, V) = nE(u, v) - ,w . (4
Here, the unction P(U) describes the local multiplication of the prey without predation pressure,
E(zt,v) describes predation, term (-_ELV) takes into account natural mortality of the predator
(mortality of prey is already taken into account by function P(U)) and K is the coefficient of food
utilization (thus, in a real biological community 0 < K < 1).
Generally, functions P(U) and E(u, v) in equations (l),(2) may be different, being dependent
on the type of population u and on the type of trophical interaction between the populations.
Here we assume that the local growth rate of the prey is governed by the following rules:
~(~~ > 0, ifO<u<ul; P(0) = P(Ur) = 0; P(G) < 0, if Q > 261. (5)

Prey-Predator System 51
Another possibility would be an Allee-type population [lo] for which function P(U) is negative for small values of u but this case will not be considered in this paper. Parameter ui is treated as carrying capacity for the given population being dependent on numerous environmental factors. To satisfy conditions (51, we choose the following function
P(u) = -!f- u(7.61 -u), ( > 211
where a is the maximal growth rate of the prey. To describe the trophical interaction, we suppose that the predator shows a functional response of Holling-type II which is usually described either bv the Michaelis-Menten formula
(7)
where h and y are certain constants and h the half-saturation density of preys; or by the Ivlev formula
E(u, ~1 = yi(i - expj-ov]) , (8)
where 71 and cu are constants. Equations (1) and (2) provided with (3), (4), (6), and (7) (or (8)) describe the spat&temporal
dynamics of a prey-predator system. There are certain indications (cf. [12]) that the principal features of the system dynamics depend on the type of the functional response rather than on the particular form of parameterization. Thus, to run computer experiments, we choose the Michaelis-Menten formula here. We want to stress, however, that the main results of this paper stay principally the same if the predation is described by the Ivlev formula.
Since in this paper, we are especially concerned with formation of non-Turing structures, we assume Dr = DZ = D. Then, in dimensionless variables t’= to, 5 = z(a/D)i/2, 6 = u/u~, and 6 = vr/(via), the equations take the following form {tilde will be omitted further on>:
7.Q = u,, + u(1 - 24) - -$f# , u
ut = v,, -t- k- u+H
V-TWU,
where k = n-y/a, m = p/a, and H = h/u1 are dimensionless parameters. It seems that, to a certain degree, the key to understanding the dynamics of a distributed
prey-predator system lays in its local behaviour. Without diffusion terms, equations (9) and (10) possess the following three stationary points for all values of parameters k, m, and H: (0, 0), (l,O), and (u*, v,) where
PH u*=l_p, ZI, = (1 - u,)(H + UN) ,
denoting, for convenience, p = m/k.
It is readily seen that (0,O) is always a saddle-point. The stationary point (1,0) is either a saddle-point for H < (1 - p)/p (note that only in this case, the nontrivial point (u*, v,) lays in the physically meaningful region u > 0, v 2 0) or a stable node otherwise. The stationary point
(u*, II*) may be of any type. Let us note here that, although equations (9) and (10) depend on three parameters k, m, and H,
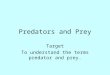
the values of the eigenvalues of the linearized system mainly depend on Ei and p = m/k, showing only slight dependence on k separately. That allows to present the results of the investigation of the system’s local kinetics as a map in the parameter plane (p, H). Figure 1 show this map for values of k equal to 0.1 and 2.0, respectively. Here, domain A corresponds to the case of (u*, v,) being a saddle-point (the only attractor in phase plane (ZL, V) for these parameter values is the stable node (l,O)), d omain B to (Ed,, v,) being a stable node and domain C to (u,, v,> being a stable focus. Domains D and E correspond to (u*, v,) being an unstable focus or unstable node,

52 S. V. PETROVSKII AND H. MALCHOW
u 0.2 0.4 0.6 0.8 1
1.2
1
0.2
0
C
‘\ ‘.
‘. ‘.
‘, ‘,
‘5 ‘\
‘. ‘..,
L.
%\
0.4 0.6 Mortality/Efficiency
(b)
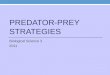
Figure 1. The map in the parameter plane (p, H) for k = 0.1 above and k = 2.0
below. Different domains correspond to different types of local kinetics: A to (u*, v,) being a saddl&point, B to a stable node, C to a stable focus, D to an unstable focus, and E to an unstable node.
respectively, surrounded by a stable limit cycle which appears via Hopf bifurcation when crossing curve 2.
Note that curves 1 and 2 are ~~universal”, i.e., their position do not depend on k. Curve 3 shows only a slight dependence on k (camp. Figure 1) while curve 4 is more sensible, nearly approaching the p axis for values of k greater than 1. Let us also note that the map for the Ivlev

Prey-Predator System 53
model obtained in parameter plane is quite similar to that obtained for the Michaelis-Menten
model. So, one can expect that the structure of the map depends rather on the type of functional
response (e.g., Holling-type II or III) than on the particular choice of parameterization.
To complete the mathematical description, equations (9) and (10) must be provided with
boundary and initial conditions. Here we use Neumann zero-flux conditions at the boundaries of
the domain. One can expect that the behaviour of the system depends on the choice of initial
conditions to a rather large extent. Actually, starting from finite initial distribution for one or
both components, the system displays a variety of diffusive front waves [12], sometimes followed by
regular or irregular patterns [8]. Contrary, starting from purely homogeneous initial conditions,
one can hardly expect to observe any pattern formation: the system maintains its homogeneity
and, because Turing structures are excluded, the values of population densities approach the
attractor (stable node, focus or limit cycle). Nevertheless, from a biological point of view, the
case that the species are originally scattered over the whole area seems reasonable. Thus, to
perform computer modelling we assume that, at the beginning of the process, both populations
are spread over the domain at the density level corresponding to stationary state (u*, v,) for
parameter values when it is unstable and then the distribution of predators is disturbed by a
small linear perturbation. Thus, we have
u(z,O) = W4, (12)
21(X, 0) = V* + [E(Z - zo) + 61 , (13)
where xc, E and 6 are certain constants. Now, one can expect that the type of the system dynamics
depends on these parameters.
3. NUMERICAL STUDY OF PATTERN FORMATION
The problem (9),(10) with (12) and (13) is solved numerically by the finite-difference method
using an implicit scheme for the diffusion terms. If we restrict our consideration to the case
Di = Ds in order to exclude the formation of Turing structures which are well studied, it seems
that any interesting dynamics of the distributed system must be related to parameter values when the stationary state (zL*, v*) is unstable and the only attractor in the phase space of the system
is the stable limit cycle (cf. [12]). In the distributed system (9),(10), the homogeneous state,
corresponding to this limit cycle, is linearly unstable with respect to small, spatially heterogeneous
perturbations. Unlike the Turing instability, the instability of the homogeneous limit cycle in this
case is more caused by the local system kinetics rather than by diffusion and may even happen
in the absence of diffusion. The reason is that the behaviour of the trajectories in the vicinity
of the limit cycle in the plane (u,v) of the homogeneous system displays only orbital and not
asymptotical stability.
For the above-mentioned reason, we choose two sets of parameters for which the problem is
thoroughly investigated:
(A) K = 2.0, m = 0.6, and H = 0.4 which corresponds to u* = 0.171 and v* = 0.473, and
(B) K = 2.0, m = 0.4, and H = 0.3 w h ere u* = 0.075 and vt = 0.347.
Other parameters may vary from experiment to experiment. All the results are shown in dimen-
sionless variables, see above.
Figure 2 shows numerical results for Case (A) for S = 0.01, e = 0.0004, xc = 0. For this set of
parameters it appears that the dynamics of the system is reduced (after certain relaxation time)
to smooth long-wave spatial oscillations (see top of Figure 2) combined with periodical temporal
behaviour in every fixed point (see bottom of Figure 2). No pattern formation takes place in this
case. For Case (B) the behaviour of the system is practically the same with the only difference
in the position of the limit cycle in the phase plane. However, the situation becomes quite different if, even for the same value of the gradient E,
there is a ‘%ritical point” x* inside the region so that v(z,,O) = v,. Figure 3 show population

54 S. V. PETROVSKII AND H. MALCHOW
1.2
1
0.8
G- r 0.6 8
0.4
0.2
0
1.4
1.2
I
P i 0.6
3 0.6 ii
0.4
0.2
0 CJ
Space
(a)
0.1 0.2 0.3 0.4 Prey Density
@I
0.5 0.6 0.7
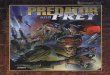
Figure 2. A typical example of the regular regime of the system dynamics resulting from a small-gradient initial distribution (see parameters in the text): (top) spatial distribution of the populations (solid line for prey, dashed for predator) calculated for t = 800; (bottom) phase plane of the distributed prey-predator system calculated in the point x = 480.
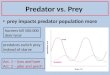
densities calculated for Case (A) and the following parameters of the initial distribution: 6 = 0,
E = 0.0~0~ and ze = 200 while the total length of the system is 1200 for (top) t = 500, (middle)
t = 1000, and (bottom) t = 2000. In this case, strongly inhomogeneous irregular oscillations
emerge. The oscillations first appear in the vicinity of the critical point z* = 200 (see top of
Figure 3) and then invade the system. It is interesting to note that there always exists a distinct

Prey-Predator System
“4c
(4
i 200
(b)
“4. ,,--.. : ‘t : $5
: :
1
0.6
$ i
0.6
0.4
0.2
0
(cl
12(
.._
M
1000 1200
55
Figure 3. Spatial distribution of the populations (solid lines for prey, dashed for predator) calculated for the csse when the “regular phase” is gradually displaced with the “chaotic phase”: (top) t = 500, (middle) t = 1000, and (bottom) t = 2000.

56 S. V. PETROVSKII AND H. MALCHOW
I-
0.8 -
0.6 -
0.4 -
0.2 -
01 I I I I I I
0 0.1 0.2 0.3 0.4 0.5 0.6 Prey Density
Figure 4. Phase plane of the system at point z = 480 after the %haotic phase” invaded the whole domain.
boundary separating the region with a smooth spatial distribution of the populations from the
region with sharp inhomogeneities. This boundary moves so that finally irregular oscillations
prevail over the whole domain. However, as the speed of the boundary is usually very small,
these two regions can coexist during a rather long time. The spatio-temporal dynamics of the
system in this case looks much like a certain “phase transition” between the “regular phase”
and the “chaotic phase”. Figure 4 shows the temporal dynamics of the system in a fixed point
2s = 480 after irregular oscillations having spread over the whole system. Note that for parameter
set (B) the system displays similar behaviour.
Our numerical results show that, in case of the existence of a critical point x*, the dynamics
of the system does not principally change for any values of the gradient E. It may not remain the same, however, if the critical point does not exist. In this case, there is a certain critical value of
the gradient e* so that the system exibits regular “nonpatchy” dynamics (see Figure 2) for E < C*
and strongly irregular otherwise (Figure 3).
Although the distinction between the two different “phases” seems obvious, it may be worth
looking into details. There are also some questions about whether the “regular” dynamics is really
regular and the irregular is chaotic. For that purpose, using the SANTIS [13] mathematical
software, we calculate power spectra of time series representing the time dependence of the
population densities in a fixed point. To present the results, we restrict ourselves to showing power
spectra for the predator density only as the prey density displays the same qualitative behaviour.
Figure 5 shows the result obtained for parameter set (B) for {top) 6 = 0.05, e = 0.0001, ze = 0
which leads to regular dynamics and for (bottom) 6 = 0, E = 0.0001, ze = 600 leading to the
irregular patchy regime. We can conclude that the temporal dynamics of the system is periodical
for the regular phase and obviously chaotic for the irregular one. However, the situation is not
always so clear. Figure 6 show power spectra of the time series for parameters (A) for (top)
6 = 0.01, e = 0.0004, ~0 = 0 (regular case), and (bottom) 6 = 0, E = 0.0004, zo = 600 (irregular
case). The difference between the two phases is not so large. Even in its irregular phase, the
system still retains certain characteristic frequences. To distinguish between two regimes more
clearly, one has to look for another approach.

10
5
b 0
2 a
-5
-10
-3 -2.5 -2 -1.5
10
5
tl 0
z a
-5
-10
(4
-a -2.3 -2 -1.3 -1 -0.5 0 0.5 l/lime
@I
Figure 5. Power spectra of time dependence of predator density in fixed point r = 480 calculated for parameter set (B) for the case of (top) regular and (bottom) irregular dynamics of the system (logarithmic plot).
It seems useful to look into details of the spatial distribution of the populations. Spatial
power spectra for parameter set (A) are presented in Figure 7 for the regular regime (the initial
conditions are the same as in Figure 2) in the upper plot and for the irregular regime (for the
initial conditions as in Figure 3) in the lower plot. One can see significant differences between the
two cases, the spectrum for “chaotic phase” being apparently more “rich” and showing a slower
decline in the short-wave region.
It seems, however, that the power spectra do not provide a sufficient description of the system
behaviour. Even when the temporal dynamics of the system components in a fixed point is
apparently chaotic (e.g., see Figure 5), it concerns only the dynamics in a single point. Finding the
measure of complexity for the dynamics of the system as a whole is still an open problem. To our

58 S. V. PETROVSKII AND H. MALCHOW
10
5
$ i5
0
a
-5
-10
10
5
ii O 2
-5
-10
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5
(b) Figure 6. Power spectra of time dependence of predator density in the point r = 480 calculated for parameter set (A) for (top) regular and (bottom) irregular dynamics of the system (fogarithmic plot).
knowledge, by now no strict, widely accepted mathematical definition of spatio-temporal chaos
is suggested (some attempts are made, e.g., in [8,14]). Respectively, any clear criteria allowing
to distinguish order from chaos in a distributed nonlinear system still wait to be developed. It
seems that, to a certain degree, to d~tin~~h between the regular spati~temporal dynamics and
the chaotic one, one can look at the temporal behaviour of the population densities spatially-
averaged over the region occupied by each phase. Figures 8 and 9 present the result obtained
for parameters (A) and (B), respectively. Now one can see quite clearly that the spatio-temporal

Prey-Predator System
-4
-8 -3 -2.6 -2.2 -2 -1.6 -
(4
59
-6
-8
Figure 7. Power spectra of space dependence of predator density calculated in the moment t = 4000 for parameter set (A) for (top) smooth (regular) and (bottom) patchy (irregular) distribution (logarithmic plot).
dynamics of the system is (in terms of spatially averaged densities), actually, highly ordered in the regular regime (top of Figures 8 and 9) and apparently chaotic for the regime of irregular pattern formation (bottom of Figures 8 and 9).
4. DISCUSSION AND CONCLUSIONS
Thus, we have obtained that for a distributed prey-predator system with “nearly homogen~us” initial distribution there are two principally different types of dynamics. In case of absence of a

60 S. V. PETROVSKII AND H. MALCHOW
0.6
I.1
0.6
0.55
p OS
d
[ 0.45
s z” 0.4
0.35
0.3 _ ._ 0.12 0.14 0.16 0.16 0.2 0.26 0.28 0.3 0.32
(a)
(b)
Figure 8. Phase plane of spatial-averaged densities of prey and predator calculated for parameter set (A) for (top) regular and (bottom) irregular dynamics of the system for the time interval 2000 < t < 4000.
critical point z* and for values of the gradient t: less than certain critical value, the system displays highly ordered behaviour, the spatial distribution of the populations having the form of smooth long-wave oscillations. However, an initial distribution with critical point leads to chaotic spatio- temporal dynamics of the system and to the formation of strongly irregular “sharp” patterns. Regular and irregular regimes can coexist inside the system during significantly long time but finally irregular oscillations always prevail.

0.5
0.45
0.4
.* z 0.35
d
E 0" 0.3
9 a
S g 0.25
0.2
0.15
Prey-Predator System 61
0.25
(a)
0.5
'0.45
0 e $ 0.4
2
P Ii
5 0.35
$
0.3
0.25 - 0.04 0.06 0.1 0.12
Mean Prey Density 0.14 0.16 0.18
@I
Figure 9. Phase plane of spatial-averaged densities of prey and predator calculated for parameter set (B) for (top) regular and (bottom) irregular dynamics of the system for the time interval 2000 < t < 4000.
The reverse transition, however, is also possible. As we have obtained in computer experiments, the chaotic “phase” even after invading the whole system, (e.g., see bottom of Figure 3) can be suppressed by increasing the diffusion coefficients. After a certain relaxation period, the system returns to the regular regime (top of Figure 2). This phenomenon of suppressing spatio-temporal chaos by increasing diffusivities is a sign that the formation of the “chaotic phase” in the system is possible only if the length of the domain exceeds a certain minimal value. Actually, the

62 S.V. PEXROVSKIIAND H. MALCHOW
dynamics of the system is characterized by the “diffusion length” (D/a)l12 (strictly speaking, by
a few diffusion lengths because there are different parameters with dimensionality l/time in the
problem) and by the length of the domain. Change of the difisivities is equivalent to resealing
the length of domain. This indication is also confirmed by numerical results.
The question of the routes from order to chaos is of significant interest and it will be the subject
of further research. Here, it is only noticed that, since the “ordered” spat&temporal dynamics
of the system is typically qua&periodical (cf. the torus in Figure 8), it seems probable that the
chaotic dynamics emerges as a result of the break-up of the torus. However, the situation is far
less clear for the temporal dynamics in a fixed point because in this case the temporal chaos is
induced by the spatial effects, i.e., by the displacement of the regular “phase” by the chaotic
“phase”. Also the geometrical properties of the strange attractor can be different for the cases of
temporal (local) and spatio-temporal chaotic dynamics (cf. Figure 4 and the bottom of Figures 8
and 9).
It seems important to understand the relevance of chaotic patterns obtained in this paper, to
the patchiness in real ecological communities. Unlike Turing structures, which are regular and
stationary, the patterns observed here are transient and irregular. They correspond to typical
spatial distributions of species in natural systems.
A certain doubt can still arise concerning whether these patterns are actually related to the
dynamics of real biological communities, or rather, must be attributed to the choice of a partic-
ular mathematical model. However, it was shown by Sherratt [15] that the type of the system
dynamics does not principally depend on the type of the model. Besides, there are strong biolog-
ical indications. There is a wide-spread opinion, based on purely biological considerations [16],
that a patchy distribution is usually more “profitable” for a given biological community than a
homogeneous one. As we have shown here, the patchy “phase” always prevails over the system
and this mathematical result seem to be in a very good agreement with biological reasoning.
In conclusion, we want to note that trophical prey-predator interactions are considered by
ecologists as principal ones, integrating different species into an ecological community. Thus, we
have shown that a patchy spatial distribution of populations, so typical in nature, can be just an
intrinsic property of any real biological community.
REFERENCES
1. A.M. Turing, On the chemical basis of morphogenesis, Phil. Trans. R. Sot. Lond. B 237, 37-72, (1952). 2. L.A. Segel and J.L. Jackson, Dissipative structure: An explanation and an ecological example, J. Theor.
Biol. 37, 545-559, (1972). 3. M. Malchow, Spatio-temporal pattern formation in nonlinear nonequilibrium plankton dynamics, PTOC. R.
Sot. Land. B 251, 103-109, (1993). 4. J.S. Wroblewski and J.J. O’Brien, A spatial model of plankton patchiness, Mutine Biology 35, 161-176,
(1976). 5. J.A. Vastano, J.E. Pearson, W. Horsthemke and H.L. Swinney, Chemical pattern formation with equal
diffusion coefficients, Phys. Lett. A 124, 320-324, (1987).
6. G.I. Barenblatt, M.E. Vinogradov, A.E. Gorbunov and S.V. Petrovskii, Modeling impact waves in complex ecological systems, OceanoEogy 33, 5-12, (1993).
7. M, Pascual, Diffusion-induced chaos in a spatial pr~ator-prey system, PTOC. R. Sot. Lond. B 251, 1-7, (1993).
8. J.A. Sherratt, M.A. Lewis and A.C. Fowler, Ecological chaos in the wake of invasion, Proc. Natl. Acad. Sci. USA 92, 2524-2528, (1995).
9. M.A. Lewis, A tale of two tails: The mathematical links between dispersal, patchiness and variability in a biological invasion, In Abstracts of the bd European Conj. on Math. in Biology and Medicine, Heidelberg, (1996).
IO. J.D. Murray, Ma~~ema~i~l ~~o~o~, Springer-Verlag, Berlin, (1989). 11. N. Shigesada and K. Kawasaki, Biological Invasions: Theory and practice, Oxford University Press, Oxford,
(1997). 12. S.V. Petrovskii and H. Malchow, Critical phenomena in plankton communities: KISS model revisited (to
appear). 13. Ft. Vandenhouten, G. Goebbels, M. Rasche and H. Tegtmeier, SANTLS-A Tool for Signal Analysis and
Time Se&x Processing, Version 1.1. User Manual, Institute of Physiology, RWTH Aachen, (1996).

Prey-Predator System 63
14. H. Shibata, Quantitative characterization of spatiotemporal chaos, Physica A 252, 428-449, (1998). 15. J.A. Sherratt, B.T. Eagan and M.A. Lewis, Oscillations and chaos behind predator-prey invasion: Mathe-
matical artifact or ecological reality ?, Phil. Dans. R. Sot. Lond. B 352, 21-38, (1997). 16. M.E. Vinogradov, Open-ocean ecosystems, In Marine Ecologg Part 2, (Edited by 0. Kinne), Volume 5, John
Wiley, New York, (1983).