Embed Size (px)
Citation preview

RECOGNITION OF EMG BASED HAND GESTURES FOR PROSTHETIC CONTROL USING
ARTIFICIAL NEURAL NETWORKS Sasipriya.S, Prema.P
Department of Biomedical Engineering,
PSG College of Technology, Coimbatore.
email id: [email protected], [email protected]
Abstract – EMG (Electromyography) is a biological signal derived from the summation of electrical signals produced by muscular actions. This EMG can be integrated with external hardware and control prosthetics in rehabilitation. Pattern recognition plays an important role in developing myo-electric control based interfaces with prosthetics and Artificial Neural Networks (ANN) are widely used for such tasks. The main purpose of this paper is to classify different predefined hand gestured EMG signals (wrist up and finger flexion) using ANN and to compare the performances of four different Back propagation training algorithms used to train the network. The EMG patterns are extracted from the signals for each movement and then ANN is utilized to classify the EMG signals based on their features. The four different training algorithms used were SCG, LM, GD and GDM with different number of hidden layers and neurons. The ANNs were trained with those algorithms using the available experimental data as the training set. It was found that LM outperformed the others in giving the best performance within short time elapse. This classification can further be used to control devices based on EMG pattern recognition.
Keywords - Electromyography, Myo-electric control, Artificial Neural Network, Back propagation algorithms, Pattern recognition.
I. INTRODUCTION
Congenital defects or accidental loss of limbs can be corrected by the use of artificial limbs or prostheses. The most efficient way of controlling the prosthesis is by the use of EMG signals obtained from the active muscles. EMG signals obtained by different actions can be used to make the prosthesis perform those different functions in real time. For doing so, the EMG signal obtained is filtered, windowed and after digital conversion, based on the features extracted, it is classified and given as control inputs to a prosthetic system for activating correct functions. The classifier is an important element in this system. Artificial neural networks (ANN) are mathematical modeling of biological neuronal systems and they are particularly useful for complex pattern recognition and classification tasks that are difficult for conventional computers or human beings. The nonlinear nature of neural networks, their ability to learn from their environments in supervised as well as unsupervised ways, as well as their universal approximation property make them highly suited for solving difficult signal processing problems. But, it is critical to select the most appropriate neural network paradigm that can be applied for specific function. Artificial neural networks based on Multi-Layer Perceptron Model (MLP) are most commonly used as classifiers for EMG pattern recognition tasks and selecting an appropriate training function and learning algorithm for a classifier is a crucial task. The time
INTERNATIONAL CONFERENCE ON CURRENT TRENDS IN ENGINEERING RESEARCH, ICCTER - 2014
INTERNATIONAL ASSOCIATION OF ENGINEERING & TECHNOLOGY FOR SKILL DEVELOPMENT www.iaetsd.in115
ISBN: 378-26-138420-01

delay between the command and activation of prosthetic function should be minimum (not more than 100ms) for the comfort of the users [1], [2], [3], [4]. Hence the classifier should be precise and rapid in producing correct signals for controlling the prosthesis, inspite of inaccuracies that may occur during the process of detection and acquisition of EMG signals. So it is necessary to assess the impact of neural network algorithms on the performance, robustness, and reliability aspects and to identify those that work the best for solving our problem of interest. This work has attempted to classify EMG based on two predefined hand gestures and to identify the better performing training functions in Feed Forward Backpropagation algorithm (standard strategy of MLP) used in recognizing the patterns.
II. .METHODOLOGY
A. EMG SIGNAL ACQUISITION AND FEATURE EXTRACTION
EMG signals used in this study are acquired from the muscles of the forearm namely Flexor Carpi Ulnaris (FCU), Extensor Carpi Radialis (ECR) and Extensor Digitorum (reference) for two types of hand movements-finger flexion and wrist up. FCU assists in wrist flexion with ulnar deviation and ECR assists in extension and radial abduction of the wrist. The myoelectric signals are acquired by means of single channel differential electrodes (disposable Ag/AgCl surface electrodes) which are then amplified and filtered before further processing.
13 different statistical features extracted from the acquired EMG signals are Integrated EMG, Mean Absolute value, Modified Mean Absolute value 1, Modified Mean Absolute value 2, Simple square integral(energy), Variance, Root Mean Square, Waveform length, Zero Crossing, Slope sign change, Willison amplitude, Difference Absolute Mean Value and Histogram of EMG. These 13 features are extracted from 150 samples of
EMG signals in which 75 represented finger flexion and the rest represented wrist up functions obtained from volunteers and inputted to the neural network for classification.
B. NEURAL NETWORK ARCHITECHTURE
A neural network is a general mathematical computing paradigm that models the operations of biological neural systems [4]. Weights (which are determined by the training algorithm), bias and activation function are important factors for the response of a neural network. A Multi-Layer Perceptron model based on Feed forward Backpropagation algorithm is used here for classification. Fig 1 shows the basic architecture of a neural network with hidden layers between the input and the output layers.
Fig 1: Neural network with hidden layers.
The designed ANN for EMG pattern recognition consists of 3-layers: input layer, tan-sigmoid (standard activation function) hidden layer and a linear (purelin) output layer. Each layer except input layer has a weight matrix, a bias vector and an output vector. The learning rule for the propagation of neural network defines how the weights between the layers will change [5], [6]. Here, the input is a 13 x 150 matrix and the corresponding target is a 2 x 150 matrix, (as 13 features extracted from 150 samples and there are 2 types of gestures to be classified). The classification was divided into 3 stages: training (70% of samples), validation (15% of samples) and test
INTERNATIONAL CONFERENCE ON CURRENT TRENDS IN ENGINEERING RESEARCH, ICCTER - 2014
INTERNATIONAL ASSOCIATION OF ENGINEERING & TECHNOLOGY FOR SKILL DEVELOPMENT www.iaetsd.in116
ISBN: 378-26-138420-01
(15% of samples). Four main training algorithms used were Scaled Conjugate Gradient (SCG), Levenberg-Marquardt (LM), Gradient descent (GD), and Gradient descent with momentum (GDM). The sample input vectors, their corresponding target vectors and the output vectors after classification are shown in Table.1.
III. RESULTS AND DISCUSSION
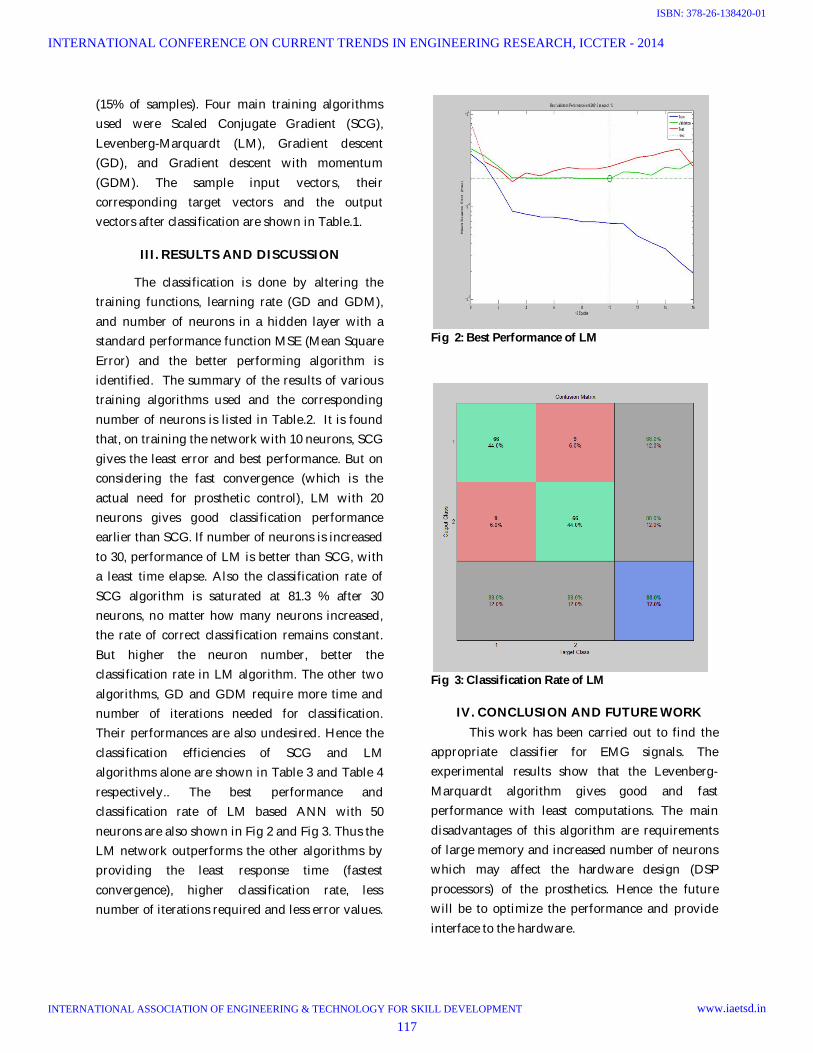
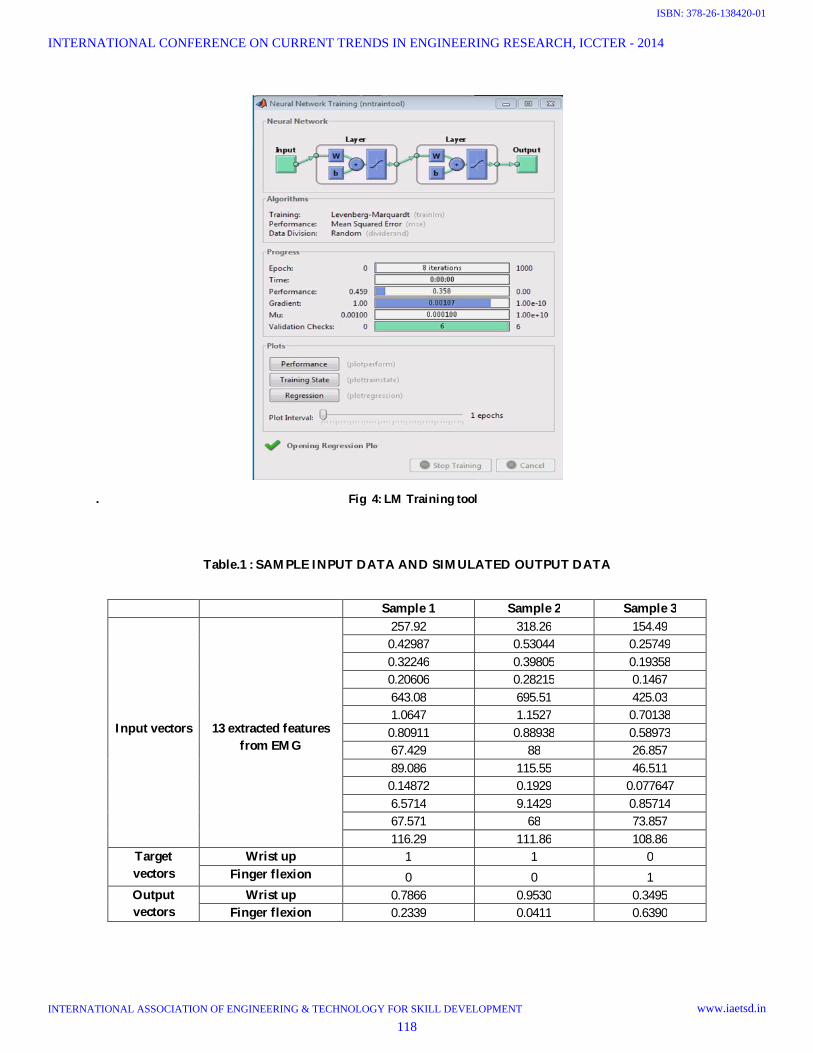
The classification is done by altering the training functions, learning rate (GD and GDM), and number of neurons in a hidden layer with a standard performance function MSE (Mean Square Error) and the better performing algorithm is identified. The summary of the results of various training algorithms used and the corresponding number of neurons is listed in Table.2. It is found that, on training the network with 10 neurons, SCG gives the least error and best performance. But on considering the fast convergence (which is the actual need for prosthetic control), LM with 20 neurons gives good classification performance earlier than SCG. If number of neurons is increased to 30, performance of LM is better than SCG, with a least time elapse. Also the classification rate of SCG algorithm is saturated at 81.3 % after 30 neurons, no matter how many neurons increased, the rate of correct classification remains constant. But higher the neuron number, better the classification rate in LM algorithm. The other two algorithms, GD and GDM require more time and number of iterations needed for classification. Their performances are also undesired. Hence the classification efficiencies of SCG and LM algorithms alone are shown in Table 3 and Table 4 respectively.. The best performance and classification rate of LM based ANN with 50 neurons are also shown in Fig 2 and Fig 3. Thus the LM network outperforms the other algorithms by providing the least response time (fastest convergence), higher classification rate, less number of iterations required and less error values.
Fig 2: Best Performance of LM
Fig 3: Classification Rate of LM
IV. CONCLUSION AND FUTURE WORK This work has been carried out to find the appropriate classifier for EMG signals. The experimental results show that the Levenberg-Marquardt algorithm gives good and fast performance with least computations. The main disadvantages of this algorithm are requirements of large memory and increased number of neurons which may affect the hardware design (DSP processors) of the prosthetics. Hence the future will be to optimize the performance and provide interface to the hardware.
INTERNATIONAL CONFERENCE ON CURRENT TRENDS IN ENGINEERING RESEARCH, ICCTER - 2014
INTERNATIONAL ASSOCIATION OF ENGINEERING & TECHNOLOGY FOR SKILL DEVELOPMENT www.iaetsd.in117
ISBN: 378-26-138420-01
. Fig 4: LM Training tool
Table.1 : SAMPLE INPUT DATA AND SIMULATED OUTPUT DATA
Sample 1 Sample 2 Sample 3
Input vectors
13 extracted features from EMG
257.92 318.26 154.49 0.42987 0.53044 0.25749 0.32246 0.39805 0.19358 0.20606 0.28215 0.1467 643.08 695.51 425.03 1.0647 1.1527 0.70138
0.80911 0.88938 0.58973 67.429 88 26.857 89.086 115.55 46.511
0.14872 0.1929 0.077647 6.5714 9.1429 0.85714 67.571 68 73.857 116.29 111.86 108.86
Target vectors
Wrist up 1 1 0 Finger flexion 0 0 1
Output vectors
Wrist up 0.7866 0.9530 0.3495 Finger flexion 0.2339 0.0411 0.6390
INTERNATIONAL CONFERENCE ON CURRENT TRENDS IN ENGINEERING RESEARCH, ICCTER - 2014
INTERNATIONAL ASSOCIATION OF ENGINEERING & TECHNOLOGY FOR SKILL DEVELOPMENT www.iaetsd.in118
ISBN: 378-26-138420-01
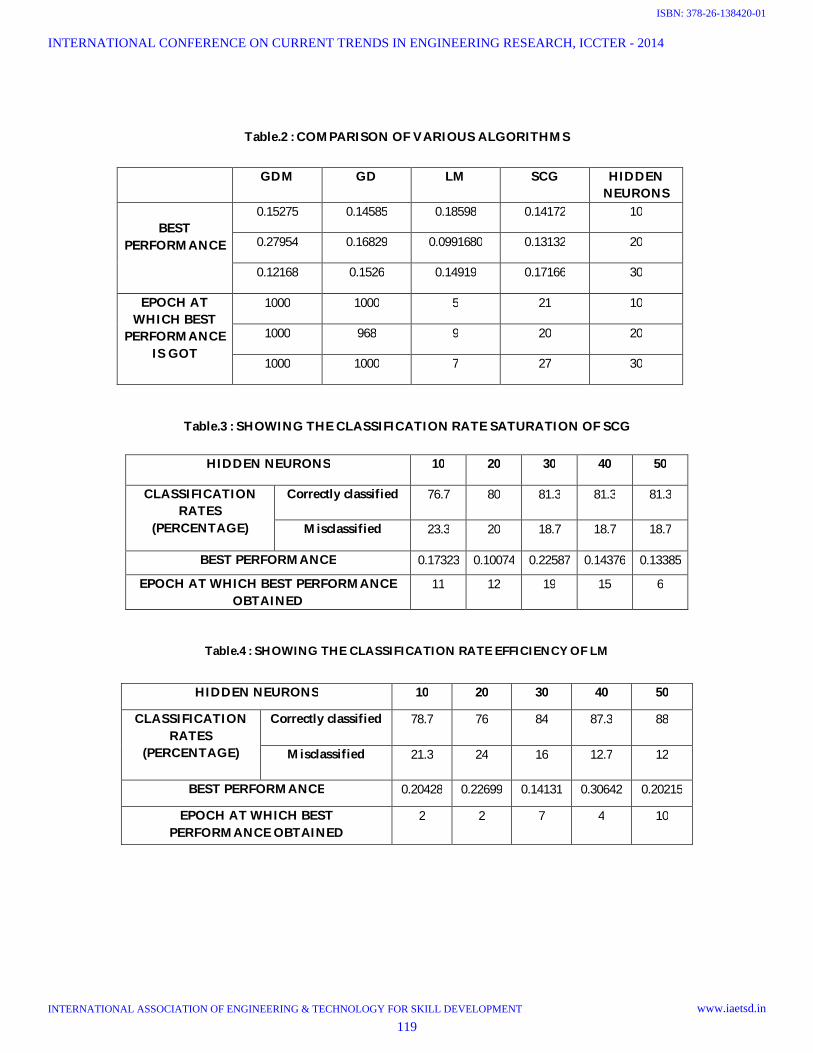
Table.2 : COMPARISON OF VARIOUS ALGORITHMS
Table.3 : SHOWING THE CLASSIFICATION RATE SATURATION OF SCG
Table.4 : SHOWING THE CLASSIFICATION RATE EFFICIENCY OF LM
GDM GD LM SCG HIDDEN NEURONS
BEST
PERFORMANCE
0.15275 0.14585 0.18598 0.14172 10
0.27954 0.16829 0.0991680 0.13132 20
0.12168 0.1526 0.14919 0.17166 30
EPOCH AT WHICH BEST
PERFORMANCE IS GOT
1000 1000 5 21 10
1000 968 9 20 20
1000 1000 7 27 30
HIDDEN NEURONS 10 20 30 40 50
CLASSIFICATION RATES
(PERCENTAGE)
Correctly classified 76.7 80
81.3 81.3 81.3
Misclassified 23.3 20 18.7 18.7 18.7
BEST PERFORMANCE 0.17323 0.10074 0.22587 0.14376 0.13385
EPOCH AT WHICH BEST PERFORMANCE OBTAINED
11 12 19 15 6
HIDDEN NEURONS 10 20 30 40 50
CLASSIFICATION RATES
(PERCENTAGE)
Correctly classified 78.7
76 84 87.3 88
Misclassified
21.3 24
16
12.7 12
BEST PERFORMANCE 0.20428 0.22699 0.14131 0.30642 0.20215
EPOCH AT WHICH BEST PERFORMANCE OBTAINED
2 2 7 4 10
INTERNATIONAL CONFERENCE ON CURRENT TRENDS IN ENGINEERING RESEARCH, ICCTER - 2014
INTERNATIONAL ASSOCIATION OF ENGINEERING & TECHNOLOGY FOR SKILL DEVELOPMENT www.iaetsd.in119
ISBN: 378-26-138420-01
REFERENCES
[1] Alcimar Soares et al., ‘Development of virtual myo electric prosthetic controlled by EMG pattern recognition system based on neural networks’ ,Journal of Intelligent Information Systems,2003 [2] Md. R. Ahsan,Muhammad, I. Ibrahimy, Othman O. Khalifa, ‘EMG Signal Classification for Human Computer Interaction: A Review’ , European Journal of Scientific Research, 2009. [3] Md. Rezwanul Ahsan, Muhammad Ibn Ibrahimy, Othman O. Khalifa, ‘Electromyography (EMG) Signal based Hand Gesture Recognition using Artificial Neural Network (ANN)’, 4th International Conference on Mechatronics (ICOM), 17-19 May 2011, Kuala Lumpur, Malaysia, [4] Yu Hen Hu, Jenq-Neng Hwang,’ Handbook of neural network signal processing’, ‘‘Introduction to Neural Networks for Signal processing’’, CRC PRESS, 2001. [5] A. Ghaffari et al., ‘Performance comparison of neural network training algorithms in modeling of
bimodal drug delivery’, International Journal of Pharmaceutics, 2006. [6]. Claudio Castellini, Patrick van der Smagt, ‘Surface EMG in advanced hand prosthetics’, . Biol Cybern , 2009.
INTERNATIONAL CONFERENCE ON CURRENT TRENDS IN ENGINEERING RESEARCH, ICCTER - 2014
INTERNATIONAL ASSOCIATION OF ENGINEERING & TECHNOLOGY FOR SKILL DEVELOPMENT www.iaetsd.in120
ISBN: 378-26-138420-01





























