Embed Size (px)
Citation preview

ROBO CONTROL SYTSEM DESIGN USING ARM
D SUDHEER BABU1, PURSUING M-TECH IN LIMAT, VIJAYAWADA P RAGA LAVIMA2, PURSUING M-TECH IN LIMAT, VIJAYAWADA
R TULASI3, PURSUING M-TECH IN LIMAT, VIJAYAWADA Abstract: In this paper we present the multimodal interaction of matlab systems for control of a robot. These systems consist of (1) The monitoring of the place by using wireless camera in matlab (2) a visual sensor that perceives and identifies commands based on the Mexican Sign Language (MSL). According to the stimuli, either movement, the multimodal interface of the robotic system is able to weight each signs contribution to perform a particular task. The multimodal interface was tested in a simulated environment to validate the pattern recognition algorithms (both, independently and integrated). The independent performance of the signs was in average of 93.62% (visual signs and spoken commands), and of 95.60% for the multimodal system for service tasks. 1. Introduction
From its beginnings, robotics has been an important assistive technology for the human being, making possible the existence of constant production lines with minimum error rates for the realization of repetitive tasks. This is an example of industrial robots, which although they provide a service to the human being, cannot be classified as service robots. According to the International Federation of Robotics (IFR) a service robot is defined as: a robot that works autonomously either partially or totally, and that performs useful services for the well being of humans and equipments. These robots can have mobility and the capacity to manipulate objects.
Thus, the application field of service robots can be
classified in:
- Applications of service for human beings (personal protection and assistance of handicapped people, etc.).
- Applications of service for equipments (maintenance, -
- - - - - repairs, cleaning, etc.). - Other autonomous tasks (surveillance, transportation,
inspection, etc.). The autonomy capacity required for such systems is obtained by means of a control system able to interact with the environment of application. To accomplish this, the system must have sensors to perceive the events that occur in the environment, and actuators/mechanisms to react and realize modifications to it.
This work is focused in developing tasks of service robotics for the human being, looking for the robotic system to be controlled by means of natural language represented in acoustic form (speech) and visual form (signs). Hence, the service robot must interpret visual and acoustic commands to perform a task. The tasks to be performed are considered to be simple in order to be arranged in sequences to accomplish more complex tasks such as to “serve a glass with water” and “take it to” a particular work space or person. Our advances towards this system are presented in this paper, which is structured as follows: in Section II a review of related studies to this problem is presented, while in Section III the details of the design of the visual and acoustic sensor systems are presented; in Section IV are presented the design details of the integrated multimodal system, whose results are presented and discussed in Section V; finally in Section VI we present our conclusions and future work. 2. Research review
Communication between humans is performed by means of voice and gestures. Unfortunately, robots cannot understand these human natural languages. Thus, a mechanism is necessary for the robot to understand these languages as a human does. To accomplish this, many research projects have been developed to perform communication between humans and robots. Among those projects we can mention to Posada-Gómez et al.that controlled a
Proceedings of International Conference On Current Innovations In Engineering And Technology
International Association Of Engineering & Technology For Skill Development
ISBN : 978 - 1502851550
www.iaetsd.in111
wheelchair with hand signals. Such equipment has also been controlled by Hashimoto by tracking other signals such as ocular movements, while used spoken commands.
A project more related to the focus of our work is presented that developed the multimodal control of a service robot for a shop. This robot was used as an informative kiosk which was able to locate a user by processing audio signals in addition to perceived visual information. On the other hand there are developments for companion robots (i.e., Aibo, Robosapien, etc.). In this field we can mention to Weitzenfeld et al. [6] that controlled a group of Aibo robots to play football by means of spoken commands and visual feedback.
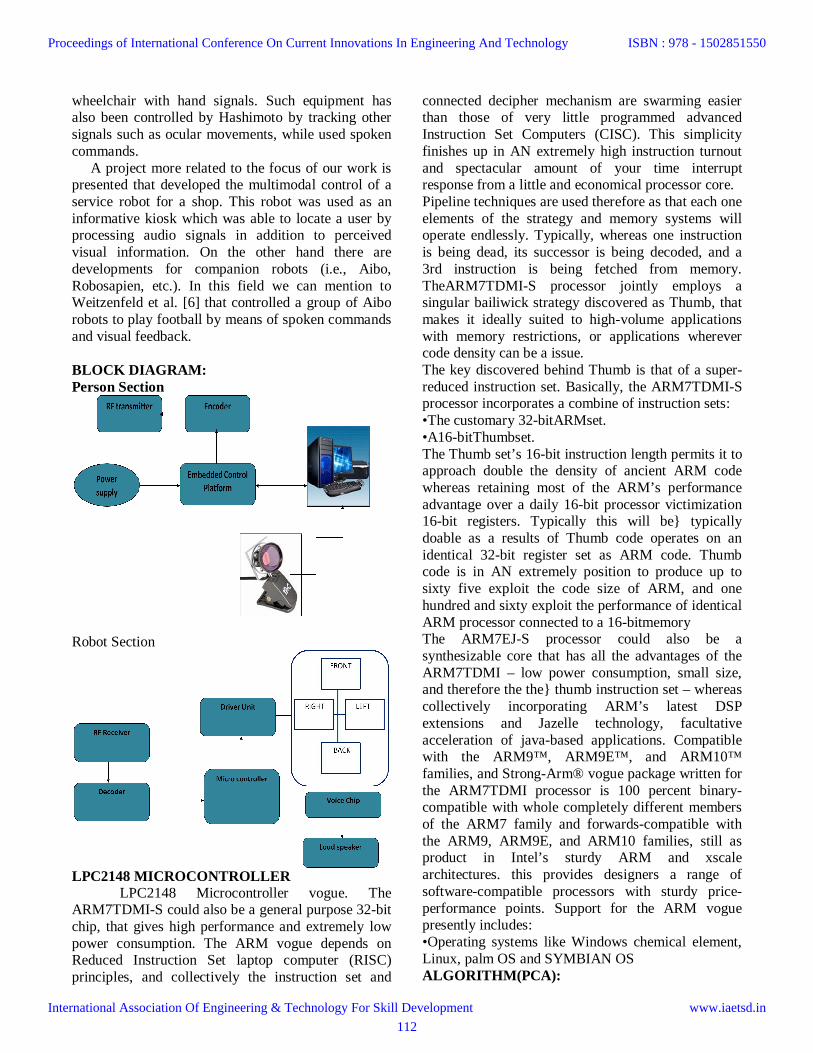
BLOCK DIAGRAM: Person Section
Robot Section
LPC2148 MICROCONTROLLER
LPC2148 Microcontroller vogue. The ARM7TDMI-S could also be a general purpose 32-bit chip, that gives high performance and extremely low power consumption. The ARM vogue depends on Reduced Instruction Set laptop computer (RISC) principles, and collectively the instruction set and
connected decipher mechanism are swarming easier than those of very little programmed advanced Instruction Set Computers (CISC). This simplicity finishes up in AN extremely high instruction turnout and spectacular amount of your time interrupt response from a little and economical processor core. Pipeline techniques are used therefore as that each one elements of the strategy and memory systems will operate endlessly. Typically, whereas one instruction is being dead, its successor is being decoded, and a 3rd instruction is being fetched from memory. TheARM7TDMI-S processor jointly employs a singular bailiwick strategy discovered as Thumb, that makes it ideally suited to high-volume applications with memory restrictions, or applications wherever code density can be a issue. The key discovered behind Thumb is that of a super-reduced instruction set. Basically, the ARM7TDMI-S processor incorporates a combine of instruction sets: •The customary 32-bitARMset. •A16-bitThumbset. The Thumb set’s 16-bit instruction length permits it to approach double the density of ancient ARM code whereas retaining most of the ARM’s performance advantage over a daily 16-bit processor victimization 16-bit registers. Typically this will be} typically doable as a results of Thumb code operates on an identical 32-bit register set as ARM code. Thumb code is in AN extremely position to produce up to sixty five exploit the code size of ARM, and one hundred and sixty exploit the performance of identical ARM processor connected to a 16-bitmemory The ARM7EJ-S processor could also be a synthesizable core that has all the advantages of the ARM7TDMI – low power consumption, small size, and therefore the the} thumb instruction set – whereas collectively incorporating ARM’s latest DSP extensions and Jazelle technology, facultative acceleration of java-based applications. Compatible with the ARM9™, ARM9E™, and ARM10™ families, and Strong-Arm® vogue package written for the ARM7TDMI processor is 100 percent binary-compatible with whole completely different members of the ARM7 family and forwards-compatible with the ARM9, ARM9E, and ARM10 families, still as product in Intel’s sturdy ARM and xscale architectures. this provides designers a range of software-compatible processors with sturdy price-performance points. Support for the ARM vogue presently includes: •Operating systems like Windows chemical element, Linux, palm OS and SYMBIAN OS ALGORITHM(PCA):
Proceedings of International Conference On Current Innovations In Engineering And Technology
International Association Of Engineering & Technology For Skill Development
ISBN : 978 - 1502851550
www.iaetsd.in112
A) Principal half associate degree analysis (PCA) can be a mathematical procedure that uses AN orthogonal transformation to convert a group of observations of presumptively correlative variables into a group of values of linearly unrelated variables cited as principal elements. Quantity the quantity the number of principal elements may be a smaller amount than or up to the number of original variables. This transformation is printed in such the manner that the first principal half has the largest potential variance (that is, accounts for the utmost quantity of the variability inside the data as possible), and each succeeding half in turn has the easiest variance potential to a lower place the constraint that it's orthogonal to (i.e., unrelated with) the preceding elements. Principal elements are guaranteed to be freelance if the knowledge set is place along ordinarily distributed. PCA is sensitive to the relative scaling of the primary variables. Depending on the sphere of application, it's collectively named the distinct Karhunen–Loève process (KLT) in signal method, the Hotelling process in variable control, correct orthogonal decomposition (POD) in bailiwick, singular value decomposition (SVD) of X (Golub and Van Loan, 1983), eigenvalue decomposition (EVD) of XTX in pure mathematics, multivariate analysis, Eckart–Young theorem (Harman, 1960), or Schmidt–Mirsky theorem in psychological science, empirical orthogonal functions (EOF) in natural science, empirical Eigen function decomposition (Sirovich, 1987), empirical half analysis (Lorenz, 1956), quasiharmonic modes (Brooks et al., 1988), spectral decomposition in noise and vibration, and empirical modal analysis in structural dynamics. PCA was fictional in 1901 by Karl Pearson, as academic degree analogue of the principal axes theorem in mechanics; it had been later severally developed (and named) by Harold Hotel ling inside the 19 Thirties. the strategy is typically used as a tool in preliminary data analysis and for making prognostic models. PCA could also be done by eigenvalue decomposition of a data variance (or correlation) matrix or singular value decomposition of a data matrix, usually once mean centering (and normalizing or pattern Z-scores) the knowledge matrix for each attribute. The results of a PCA ar usually mentioned in terms of half scores, usually cited as issue scores (the reworked variable values hold dear a particular data point), and loadings (the weight by that each standardized original variable need to be augmented to induce the half score).
PCA is that the best of truth eigenvector-based variable analyses. Often, its operation could also be thought of as revealing the inner structure of the information in AN extremely approach that best explains the variance inside the information. If a variable knowledge set is envisioned as a group of coordinates in AN extremely high-dimensional knowledge space (1 axis per variable), PCA can offer the user with a lower-dimensional image, a "shadow" of this object once viewed from its (in some sense; see below) most informative viewpoint. this will be done by pattern exclusively the first few principal elements so as that the spatiality of the reworked data is reduced. 3. Sensor systems 3.1 Signs recognition system
In order to develop in a satisfactory manner the sign recognition system, this was developed in different stages: imaging, segmentation, obtaining the descriptor form, learning patterns by the neural network and recognition. Relation among these stages is shown in the flowchart.
In the paragraphs below we will briefly explain each of the stages mentioned above. Obtaining images
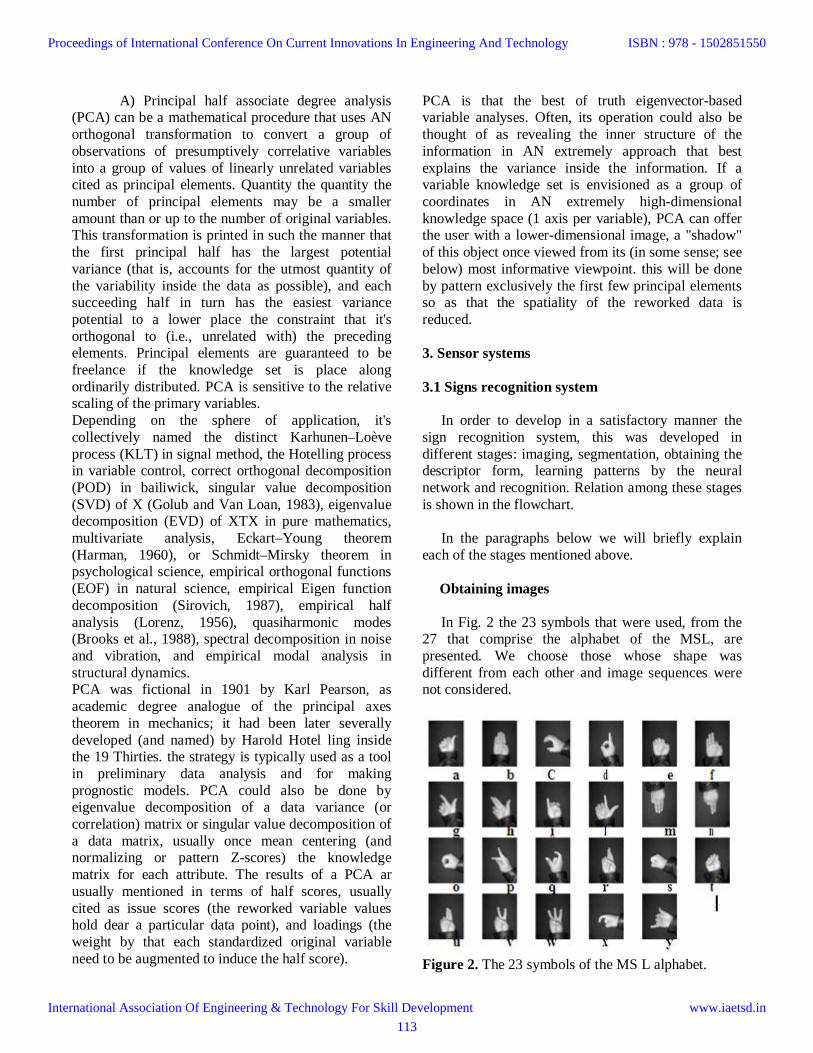
In Fig. 2 the 23 symbols that were used, from the 27 that comprise the alphabet of the MSL, are presented. We choose those whose shape was different from each other and image sequences were not considered.
Figure 2. The 23 symbols of the MS L alphabet.
Proceedings of International Conference On Current Innovations In Engineering And Technology
International Association Of Engineering & Technology For Skill Development
ISBN : 978 - 1502851550
www.iaetsd.in113
The images of the signs were taken using a uniform background. Additionally, the user wore a garment that let uncover only the hand in order to avoid interference by objects in the wrist (watch, bracelets, etc.). This ensured that the region of interest to be processed belonged only to the hand.
We used four different sets similar to that shown in Fig. 2, each with a different background. These four image sets served to create a database of images by varying their parameters using a photometric filter. The used filter was a power function of the form shown in Eq. 1.
f(x)= cex 0.9 ≤ x ≤ 1.1 (1)
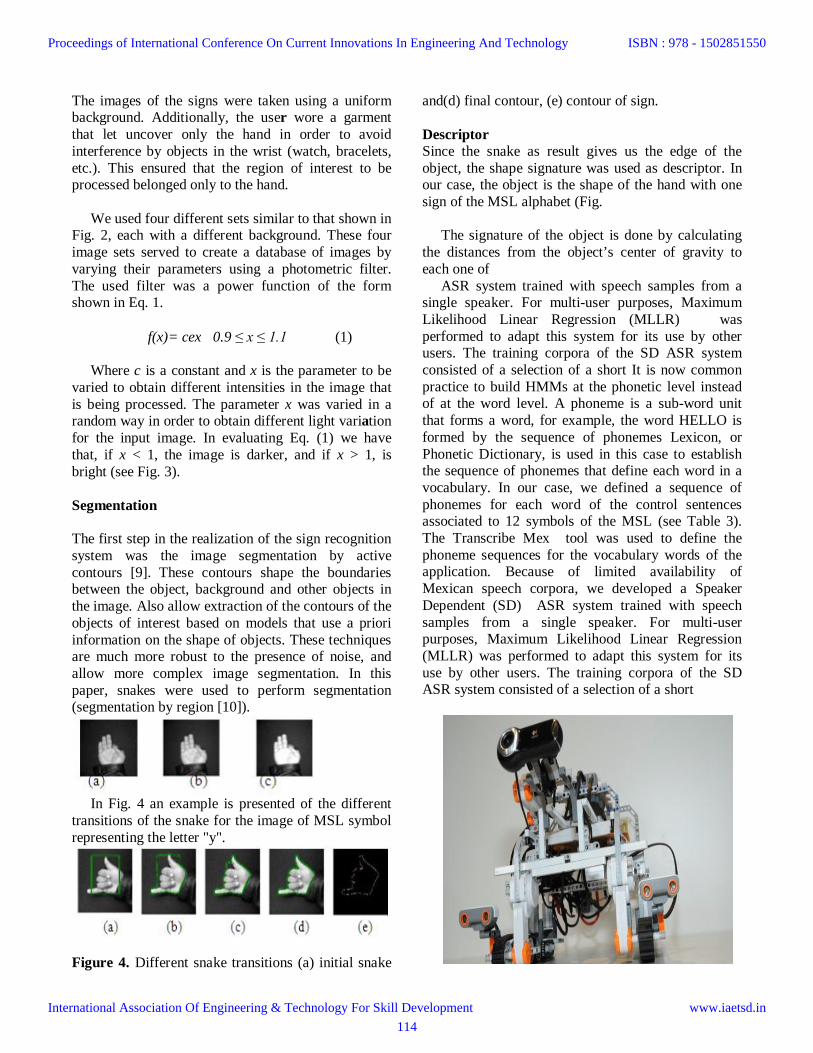
Where c is a constant and x is the parameter to be varied to obtain different intensities in the image that is being processed. The parameter x was varied in a random way in order to obtain different light variation for the input image. In evaluating Eq. (1) we have that, if x < 1, the image is darker, and if x > 1, is bright (see Fig. 3). Segmentation The first step in the realization of the sign recognition system was the image segmentation by active contours [9]. These contours shape the boundaries between the object, background and other objects in the image. Also allow extraction of the contours of the objects of interest based on models that use a priori information on the shape of objects. These techniques are much more robust to the presence of noise, and allow more complex image segmentation. In this paper, snakes were used to perform segmentation (segmentation by region [10]).
In Fig. 4 an example is presented of the different
transitions of the snake for the image of MSL symbol representing the letter "y".
Figure 4. Different snake transitions (a) initial snake
and(d) final contour, (e) contour of sign. Descriptor Since the snake as result gives us the edge of the object, the shape signature was used as descriptor. In our case, the object is the shape of the hand with one sign of the MSL alphabet (Fig.
The signature of the object is done by calculating the distances from the object’s center of gravity to each one of
ASR system trained with speech samples from a single speaker. For multi-user purposes, Maximum Likelihood Linear Regression (MLLR) was performed to adapt this system for its use by other users. The training corpora of the SD ASR system consisted of a selection of a short It is now common practice to build HMMs at the phonetic level instead of at the word level. A phoneme is a sub-word unit that forms a word, for example, the word HELLO is formed by the sequence of phonemes Lexicon, or Phonetic Dictionary, is used in this case to establish the sequence of phonemes that define each word in a vocabulary. In our case, we defined a sequence of phonemes for each word of the control sentences associated to 12 symbols of the MSL (see Table 3). The Transcribe Mex tool was used to define the phoneme sequences for the vocabulary words of the application. Because of limited availability of Mexican speech corpora, we developed a Speaker Dependent (SD) ASR system trained with speech samples from a single speaker. For multi-user purposes, Maximum Likelihood Linear Regression (MLLR) was performed to adapt this system for its use by other users. The training corpora of the SD ASR system consisted of a selection of a short
Proceedings of International Conference On Current Innovations In Engineering And Technology
International Association Of Engineering & Technology For Skill Development
ISBN : 978 - 1502851550
www.iaetsd.in114

the points that form the boundary. This yields a histogram of distances as shown in Fig. 5 which is the histogram contour for the symbol.This histogram consisted of 360 different values which was the input vector for training the neural network.
6. Conclusions and future work
In this paper a multimodal system to control a service robot was presented. This system was built with two main blocks to control the moment and video monitoring by using matlab technology. The proposed system was validated by means of implementation in a simulation environment. The robot was constituted by a mobile platform & voice based control.Among the future research and expectations for this work we present the following: A Robust Period Embedded Vision System on an Unmanned Rotorcraft for Ground Target Following
- To use a ZigBee network devices to synchronize the received signals.
- To control the robot we are using hand geusture bu using matlab for finger signs detection by using a different scheme to RGB such as the CieLAB system.
- Implementation of monitoring the place of MSL signs that have movement.
References: 1.International Federation of Robotics (IFR): http://www.ifr.org/service-robots/ 2.Posada-Gomez, R., Sanchez-Medel, L.H., Hernandez, G.A., Martinez-Sibaja, A., Aguilar-Laserre, A., Leija-Salas, L., "A Hands Gesture System Of Control For An Intelligent Wheelchair", 4th International Conference on Electrical and Electronics Engineering (ICEEE 2007), pp.68-71, 2007.
3.Hashimoto, M., Takahashi, K., Shimada, M., "Wheelchair control using an EOG- and EMG-based gesture interface", IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2009. AIM 2009, pp.1212-1217, 2009.
4.Alcubierre, J.M., Minguez, J., M ontesano, L., Montano, L., Saz, O., Lleida, E., “Silla de Ruedas Inteligente Controlada por Voz”, In Primer Congreso Internacional de Domótica, Robótica y Teleasistencia para Todos, 2005.
5.Böhme, H.-J., Wilhelm, T., Key , J., Schauer, C., Schröter, C., Groß, H.-M., Hempel, T., “A n approach to multi-modal human–machine interaction for intelligent service robots”, Robotics and Autonomous Systems, Vol. 44, pp. 83-96, ISSN 0921-8890, 2003.
Proceedings of International Conference On Current Innovations In Engineering And Technology
International Association Of Engineering & Technology For Skill Development
ISBN : 978 - 1502851550
www.iaetsd.in115