
Research on Research on Robot Soccer Robot Soccer
and what and what PSU can doPSU can do
The perceptions The perceptions
Three perceptions: Three perceptions: seesee, , hearhear and and sense_bodysense_body..
All related to one system of All related to one system of perception.perception.
Representation of perceptions:Representation of perceptions:(see 1 (ball …) …)(see 1 (ball …) …)

Visual PerceptionVisual Perception
seesee.. List of objects recognized: List of objects recognized:
– type, type, – direction, direction, – distance, distance, – speed, speed, – number.number.
Lines, gates, boundaries, ball.Lines, gates, boundaries, ball.
sense_bodysense_body
Force detectionForce detection Energy available.Energy available.
Principal actions:Principal actions: – dashdash, , – kickkick, , – turnturn – saysay..
ActionsActions

– Role levelRole level : Determines the roles of each : Determines the roles of each robot. robot.
(defender, attacker and goal (defender, attacker and goal keeper) keeper)
– Action levelAction level : Selects actions of each robot. : Selects actions of each robot.
(shooting, blocking, dribbling, (shooting, blocking, dribbling, etc) etc)
– Behavior levelBehavior level : Move and obstacle avoidance : Move and obstacle avoidance– Execution levelExecution level : Motor control : Motor control
Role level
VarianVariants of ts of ControControl l structstructureure

Vision-based systemVision-based system– Remote brainless Remote brainless
systemsystem– Brain-on-board system Brain-on-board system
Robot-based systemRobot-based system
Selection guidelinesSelection guidelines– Developer’s interestsDeveloper’s interests– Computational capabilities of Computational capabilities of
host computer and vision host computer and vision systemsystem
– Capabilities of the Capabilities of the robotsrobots
– CostCost
The system can be classified using The system can be classified using the the location of intelligencelocation of intelligence
Classification of Robot Classification of Robot Soccer SystemsSoccer Systems

Centralized systemCentralized system Simple and inexpensive Easy to develop the robot Simple and inexpensive Easy to develop the robot No local sensors.No local sensors. Fast computing time Fast computing time
and sampling timeand sampling time Easy to debug and upgrade the programEasy to debug and upgrade the program
Remote-Brainless Remote-Brainless SystemSystem
High cost vision system and host computerHigh cost vision system and host computer
A type of vision-based systemA type of vision-based system
Intelligent part is implemented Intelligent part is implemented in the host computer. in the host computer.

Robots Robots The robots consist of The robots consist of driving mechanism,driving mechanism, communication partcommunication part, and , and computational computational
partpart for velocity and for processing the for velocity and for processing the data received from a hostdata received from a host computer computer Host computerHost computer
All the calculations for vision data processing, strategies, position control of robots All the calculations for vision data processing, strategies, position control of robots and so on, are done in the and so on, are done in the host computerhost computer which controls robots like radio - which controls robots like radio -controlled car controlled car
Remote-Remote-Brainless Brainless SystemSystem

Brain-on-board Brain-on-board system system
Intermediate levelIntermediate level between the centralized and the distributed systems / between the centralized and the distributed systems / between the remote-brainless and the robot based systems.between the remote-brainless and the robot based systems.
Robots can use Robots can use local sensorslocal sensors to move to the goal and to avoid the opponent. to move to the goal and to avoid the opponent. Can Can decompose the systemdecompose the system into high level (host computer) into high level (host computer)
and low level (robot systems).and low level (robot systems). Easy to make Easy to make the system in the system in
modular formmodular form
A type of vision-based systemA type of vision-based system
Intelligence is partially Intelligence is partially implemented in the host implemented in the host computer and robots.computer and robots.

Robots Robots The robots have functions such as velocity control, position control, obstacle The robots have functions such as velocity control, position control, obstacle
avoidance, etc.avoidance, etc. Host computerHost computer
The host The host computer processes vision datacomputer processes vision data and and calculates next behaviorscalculates next behaviors of robots of robots according to strategies and according to strategies and sends commandssends commands to the robots using RF modem. to the robots using RF modem.
Brain-Brain-on-on-
board board system system

Robot-based Robot-based systemsystem
Suitable when the Suitable when the large number of agentslarge number of agents exist exist Complex and Complex and expensiveexpensive Need Need communication among robotscommunication among robots
Distributed system Distributed system
Intelligent part is Intelligent part is implemented in the implemented in the robots.robots.

Robots Robots The robots decide their own behavior autonomously using the received The robots decide their own behavior autonomously using the received
vision data, own sensor data and strategies. vision data, own sensor data and strategies. Host computerHost computer
The The host computer processes only vision datahost computer processes only vision data
can be considered as a can be considered as a kind of sensor.kind of sensor.
Robot-Robot-based based systemsystem

Main PCMain PC Serial PortSerial Port
– Select the serial communication portSelect the serial communication port Home GoalHome Goal
– Select the home side on the screenSelect the home side on the screen Find ObjectsFind Objects
– Check the box of which you like to find on the fieldCheck the box of which you like to find on the field Initial Position:Initial Position: tell the vision system the initial tell the vision system the initial
position position
of each objectof each object– E.g.) for the ballE.g.) for the ball
i) turn on the radio button of ‘Ball’i) turn on the radio button of ‘Ball’
ii) place the mouse on the ball and press the left buttonii) place the mouse on the ball and press the left button– Repeat above procedure for another objectRepeat above procedure for another object
EXAMPLEEXAMPLE

Main PCMain PC
Select SituationSelect Situation– The situation in which the game is about to startThe situation in which the game is about to start
Command Command – Click ‘Ready’: the vision system starts finding the Click ‘Ready’: the vision system starts finding the
objects objects
on the fieldon the field– Click ‘Start’ : the vision system starts sending Click ‘Start’ : the vision system starts sending
commandscommands
to the robotsto the robots– Click ‘Stop’ : the vision system stops finding objectsClick ‘Stop’ : the vision system stops finding objects
and sending commandsand sending commands
EXAMPLEEXAMPLE

Communication (Infra-Communication (Infra-red)red)
Infra-red CommunicationInfra-red Communication
– Four transmitters are used to cover the whole Four transmitters are used to cover the whole fieldfield
t
Transmitter
Receiver
t
r, : View angle
r
130cm0,0cm
35cm,35cm
15
0cm
X
Y
35cm,95cm
115cm,35cm 115cm,95cm
EXAMPLEEXAMPLE

CommunicationCommunication Both teams share the same transmitter via a Both teams share the same transmitter via a
mediatormediator
Communication PacketCommunication Packet
– Three 0xFFs: the start of a packetThree 0xFFs: the start of a packet– 0x0F (0xF0): Team A (Team B)0x0F (0xF0): Team A (Team B)
– VVLi Li ,, VVRiRi: left and right wheel velocity of robot i: left and right wheel velocity of robot i
– 0xAA: end of velocity data of each robot0xAA: end of velocity data of each robot
0xFF 0xFF 0xFF 0x0F 0xAA 0xAA 0xAA1LV 1RV 2LV 3LV2RV 3RV
TransmitterPC 1 (Team A) PC 2 (Team B)
Infra-redmodule
EXAMPLEEXAMPLE

Tough, practical problems Tough, practical problems to be solvedto be solved
Real-TimeReal-Time image processing image processing Sensor fusionSensor fusion (sonar, touch, vision, (sonar, touch, vision,
light, other). light, other). Motors, batteries. Motors, batteries. Sophisticated Sophisticated control strategiescontrol strategies RadioRadio communication communication AgentAgent communication communication
Problems Problems
Players do not know Players do not know absolute absolute locationslocations. .
Points of referencePoints of reference are: are: boundaries, lines and gates.boundaries, lines and gates.
Conflicts Conflicts of playersof players Limited Limited visibilityvisibility Limited Limited communicationcommunication

SoftwareSoftware Real-TimeReal-Time Problem, Problem, rule-basedrule-based, ,
agent agent behavior.behavior. DynamicDynamic planning and executionplanning and execution of of
plans in real-time.plans in real-time. Cooperation and competition.Cooperation and competition. No precise informationNo precise information Non-deterministicNon-deterministic behavior: behavior:
– results of actions are uncertain.results of actions are uncertain.

Software potentials Software potentials (cont.)(cont.)
Voice Voice comunication of playerscomunication of players Various players have different rules Various players have different rules
and behaviors, different strategies and and behaviors, different strategies and implementations - implementations - rule-based, neural rule-based, neural nets, fuzzy logic, etc.nets, fuzzy logic, etc.
multi-agents:multi-agents: competition versus competition versus collaboration. collaboration.
on-lineon-line versus versus off-lineoff-line, , individualindividual versus versus group behaviors.group behaviors.

FIRA and the FIRA and the ECE 478/ECE 479 class at ECE 478/ECE 479 class at
PSUPSU
Class project and in future Capstone Class project and in future Capstone Project (if a company will sponsor)Project (if a company will sponsor)
High-School projectHigh-School project Portland Cyber TheatrePortland Cyber Theatre Experience in Visual C++, Basic, Lisp Experience in Visual C++, Basic, Lisp
and Prolog programming.and Prolog programming. A lot of fun.A lot of fun. Travel to Japan or Korea?Travel to Japan or Korea?

Does PSU team has a Does PSU team has a chance?chance?
1. Professor Kim from KAIST in Korea 1. Professor Kim from KAIST in Korea invited us to create a new league of invited us to create a new league of walking robotswalking robots
2. 2. We have experience with walking We have experience with walking robotsrobots
3. We will try to propose new 3. We will try to propose new competition ideas and have a leverage competition ideas and have a leverage of knowing them earlier.of knowing them earlier.– Besides, our students are smart…..?Besides, our students are smart…..?
Let us look to our robots…...

What we What we proposepropose
Robot soccer systemRobot soccer system– Intelligent control Intelligent control
systemsystem– Multi-agent systemMulti-agent system
Composition of robot soccer Composition of robot soccer systemsystem– Mobile robotsMobile robots– Host computerHost computer– Vision systemVision system– Communication moduleCommunication module
Sports commentator
Walking robots

Team OneTeam One
Complex robotsComplex robots 8 to 12 servos8 to 12 servos

Our walking quadrupeds and Our walking quadrupeds and hexapodshexapods
Collaborations:
ATR, Japan
Technical University of Warsaw, Poland
Technical University of Gliwice, Poland
KAIST, Korea
Multi-national team

QuadrupeQuadruped d

Basic Radio-Controlled Basic Radio-Controlled Spider HexapodSpider Hexapod with Gripper with Gripper

Spider with a cameraSpider with a camera


New soccer-specialized New soccer-specialized hexapodhexapod

Hexapod’s Soccer Hexapod’s Soccer KickerKicker

Team TwoTeam Two
Simple robots - hexapodsSimple robots - hexapods 2 servos2 servos

SoccerBotSoccerBot
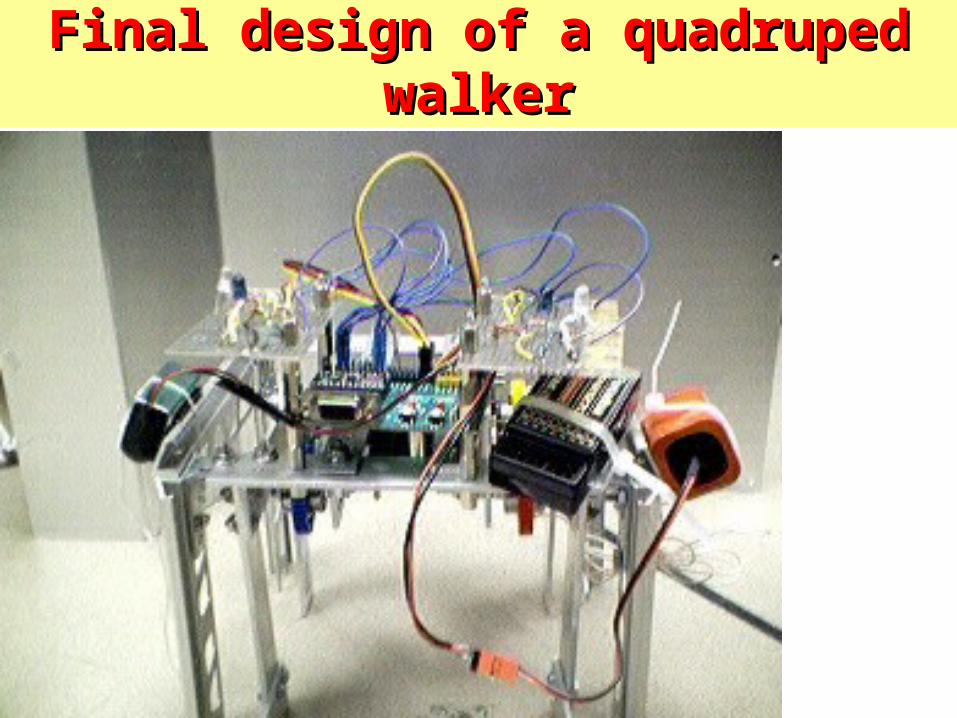
Final design of a quadruped Final design of a quadruped walkerwalker

Block Diagram of the Block Diagram of the Simple Robot SystemSimple Robot System
Logic Power
PWM RightPWM Left
MotorDriver
MotorDriver
Motor Motor
VoltageRegulator
MotorPower
Micro-Controller
Battery
Communication Signal
CommunicationModule
Motor Part

Sport Sport CommentatorsCommentators
Bug

Virginia WoolfVirginia Woolf
JonasJonas

Marvin the Crazy Marvin the Crazy RobotRobot

Class Projects - Class Projects - Winter/Spring 2002Winter/Spring 2002
1. 1. Robot Robot position, orientation and conflict position, orientation and conflict detection using top-mounted cameradetection using top-mounted camera
2. 2. Ball recognitionBall recognition and vision interface to and vision interface to the serverthe server
3. Server and user interface3. Server and user interface 4. Egoistic soccer-playing strategy4. Egoistic soccer-playing strategy 5. 5. CollaborativeCollaborative soccer-playing strategy soccer-playing strategy 6. Recovery from body conflicts such as 6. Recovery from body conflicts such as
leg entanglementsleg entanglements of robots of robots

Class Projects - Class Projects - Winter/Spring 2002Winter/Spring 2002
7. Design of robo-head sport 7. Design of robo-head sport commentator: speech and natural commentator: speech and natural language generation.language generation.
8. Mechanical improvements to 8. Mechanical improvements to robotsrobots
9. Design of a special soccer player 9. Design of a special soccer player hexapod.hexapod.

Image Processing: find position, orientation and conflicts of a walker

Filtering, histogramming, Hough transform, equations
Localization, orientation, conflicts (leg entanglements)
Robo Soccer - Why is it Robo Soccer - Why is it so cool? so cool?
Is Robot Soccer useful?Is Robot Soccer useful? Is the result of Robot Soccer useful?Is the result of Robot Soccer useful? Is Robot Soccer the worlds largest Is Robot Soccer the worlds largest
playground?playground? Is there money to be made with Is there money to be made with
robots to play sports? robots to play sports?

Why are Robot Sports so Why are Robot Sports so cool? cool?
Captures the Captures the essence of socceressence of soccer. (That’s . (That’s why there can be a lot of people cheering why there can be a lot of people cheering on the teams)on the teams)
””Hacker-party”Hacker-party” more than a dull more than a dull academic conference….that is, it is a lot of academic conference….that is, it is a lot of activity.activity.
Interesting problem in Interesting problem in co-ordinatingco-ordinating 11 11 processes to achieve a common goal.processes to achieve a common goal.
The The width of the fieldwidth of the field, from Robotic-, from Robotic-nerds to Sociologists.nerds to Sociologists.

In the simulator league, you are In the simulator league, you are forced to forced to learnlearn many concepts: many concepts:– for example for example network communication, multi-network communication, multi-
threadingthreading, agents, hardware, etc., agents, hardware, etc.
TestbedTestbed for AI-algorithms, sociological for AI-algorithms, sociological theories. theories.
Fairly Fairly simplesimple environment. environment. A limited set of rules (also predefined), A limited set of rules (also predefined),
but always but always closeclose to real world to real world problems.problems.
Why are Robot Sports so Why are Robot Sports so cool? cool?

What are the problems with What are the problems with Robot Competitions ? Robot Competitions ?
Too much work Too much work before reachingbefore reaching an an interesting research levelinteresting research level
Too much focus on Too much focus on low levellow level implementation (still)implementation (still)
Still Still focus on competingfocus on competing instead of instead of comparing of strategies.comparing of strategies.

ResearchResearch
We do research in several areas:We do research in several areas:– Machine learning (constructive induction)Machine learning (constructive induction)– Decision theory Decision theory – Social agents Social agents – walker’s gaits evolutionwalker’s gaits evolution– +more+more
In all of the above we plan to use robot In all of the above we plan to use robot sports as a testbed, or applied area.sports as a testbed, or applied area.
ConclusionConclusion
Robot sports areTHE Robot sports areTHE new standardnew standard problem within AI.problem within AI.
1500 researchers1500 researchers world-wide. world-wide. Focuses on interdisciplinary co-Focuses on interdisciplinary co-
operative work between the operative work between the researchers as well as co-operation researchers as well as co-operation between the agents.between the agents.
NewNew experience experience for for PSUPSU

Current classCurrent class 4 ME students4 ME students 3 CS students3 CS students 3 EE students3 EE students
Using existing robots CS and EE students develop software
ME students develop 2 new robot prototypes and kits with good documentation
CS and EE students build new robots from kits ME students adopt software to
new robots and learn programming
6 robots of two types build and tested in July

Current classCurrent class 4 ME students4 ME students 3 CS students3 CS students 3 EE students3 EE students
Using existing robots CS and EE students develop software
ME students develop 2 new robot prototypes and kits with good documentation
CS and EE students build new robots from kits ME students adopt software to
new robots and learn programming
6 robots of two types build and tested in July

Technical Publications Technical Publications Hiroaki Kitano, Masahiro Fujita, Stephane Zrehen , and Koji Hiroaki Kitano, Masahiro Fujita, Stephane Zrehen , and Koji
Kageyama, "Sony Legged Robot for RoboCup Challenge", Kageyama, "Sony Legged Robot for RoboCup Challenge", – In Proceedings of the IEEE INTERNATIONAL CONFERENCE ON In Proceedings of the IEEE INTERNATIONAL CONFERENCE ON
ROBOTICS AND AUTOMATION, IEEE, 1998, pp.2605-2612 ROBOTICS AND AUTOMATION, IEEE, 1998, pp.2605-2612 Manuela Veloso, William Uther, Masahiro Fujita, Minoru Manuela Veloso, William Uther, Masahiro Fujita, Minoru
Asada, and Hiroaki Kitano, "Playing Soccer with Legged Asada, and Hiroaki Kitano, "Playing Soccer with Legged Robot", Robot", – In Proceedings of the INTERNATIONAL CONFERENCE ON In Proceedings of the INTERNATIONAL CONFERENCE ON
INTELLIGENT ROBOTS AND SYSTEMS, 1998, pp.437-442 INTELLIGENT ROBOTS AND SYSTEMS, 1998, pp.437-442
Let us go deeperLet us go deeper

How to find more How to find more about RoboCup?about RoboCup?
Web Pages:Web Pages:
http://medialab.di.unipi.it/Project/http://medialab.di.unipi.it/Project/RobocupRobocup
http://www.robocup.orghttp://www.robocup.org http://www.dsv.su.se/~robocuphttp://www.dsv.su.se/~robocup
Recommended

















