MARINE
Classical Control Theory
Proportional - Integral - Derivative
Dr. Matt StablesDr. James Taylor
23/02/2010
MARINE
Introduction
History of ControlBeen used since antiquity for control of Mechanical systems.
Babylonian and Greek development of Water Clock
Feedback Control;Such as a float valve, controlling temperature, speed or fluid levels
With Modern computer systemsSensor output can be compared with desired output, input adjusted accordingly.
Example :Temperature control can be achieved through use of a heater or a fan
Challenge comes when deciding level of control input for desired results !
MARINE
Introduction
Proportional-Integral-Derivative (PID) control accounts for more than 90% of
the controls and automation applications today.
Primarily because;Effective and simple to implement.
Originally intended for linear, time-invariant systems
The PID algorithm has evolved, to control systems with more complex dynamics.
In this lecture;
The need for feedback control
The influences of Proportional, Integral and Derivative aspects
Basic parameter tuning methods
Concentrate on Continuous Time control ( s – operator )
MARINE
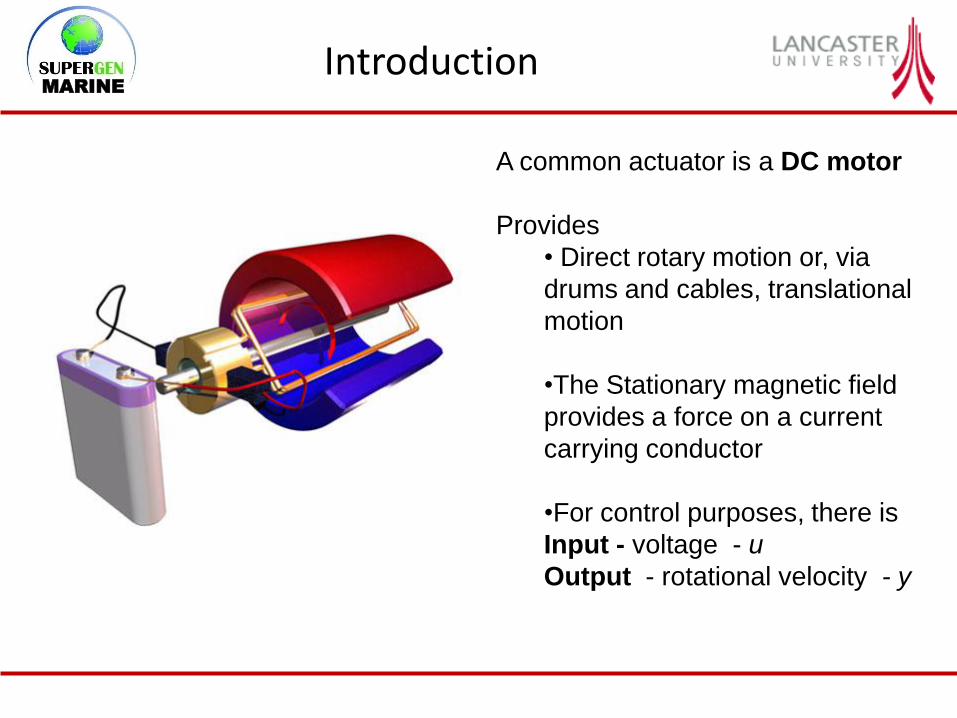
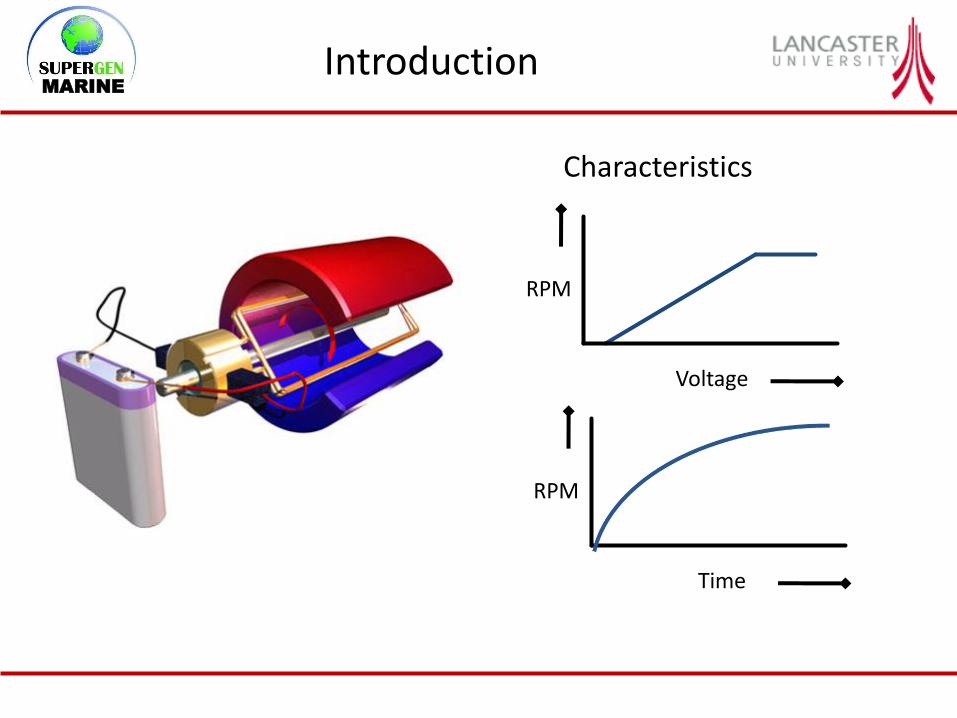
A common actuator is a DC motor
Provides
• Direct rotary motion or, via
drums and cables, translational
motion
•The Stationary magnetic field
provides a force on a current
carrying conductor
•For control purposes, there is
Input - voltage - u
Output - rotational velocity - y
Introduction
MARINE
Voltage
RPM
Time
RPM
Characteristics
Introduction
MARINE
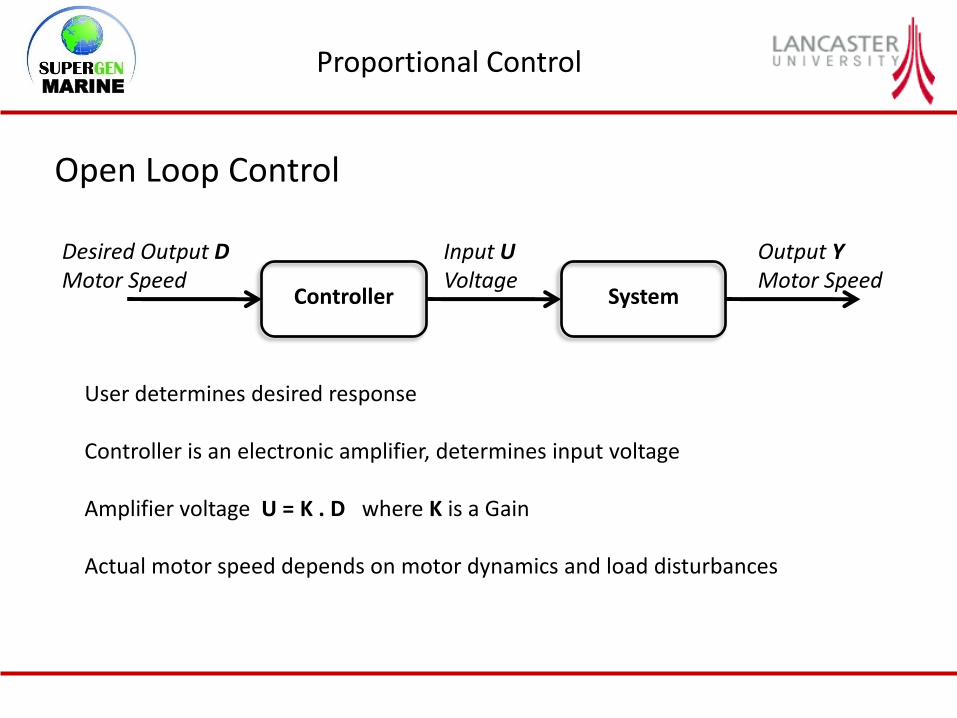
Proportional Control
System
Output YMotor Speed
Input UVoltage
Controller
Desired Output DMotor Speed
Open Loop Control
User determines desired response
Controller is an electronic amplifier, determines input voltage
Amplifier voltage U = K . D where K is a Gain
Actual motor speed depends on motor dynamics and load disturbances
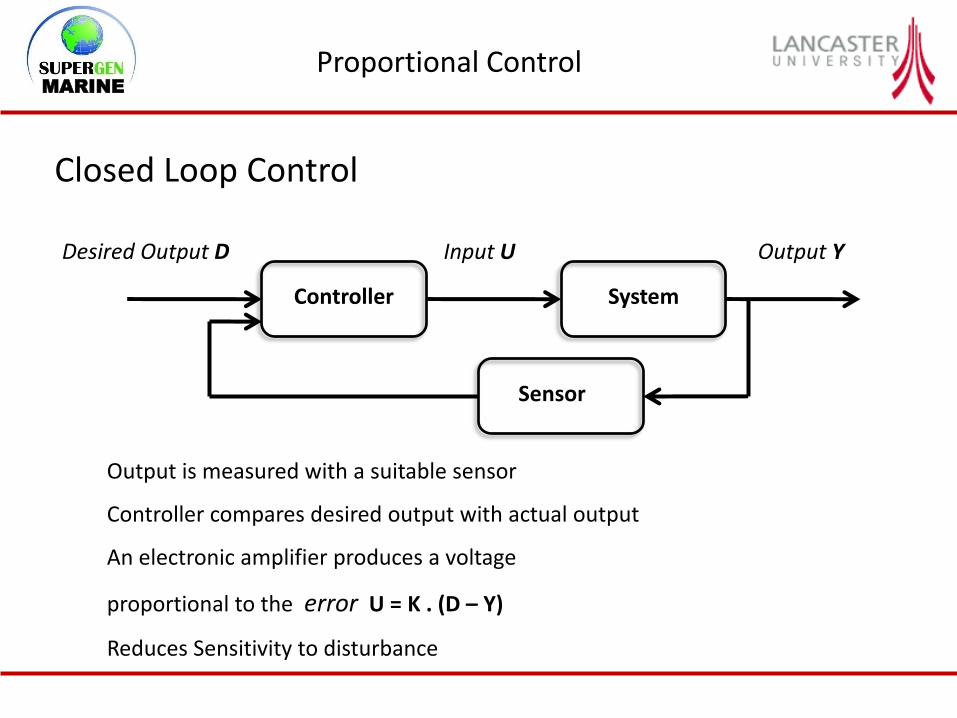
MARINE
System
Output YInput U
Controller
Desired Output D
Proportional Control
Sensor
Closed Loop Control
Output is measured with a suitable sensor
Controller compares desired output with actual output
An electronic amplifier produces a voltage
proportional to the error U = K . (D – Y)
Reduces Sensitivity to disturbance
MARINE
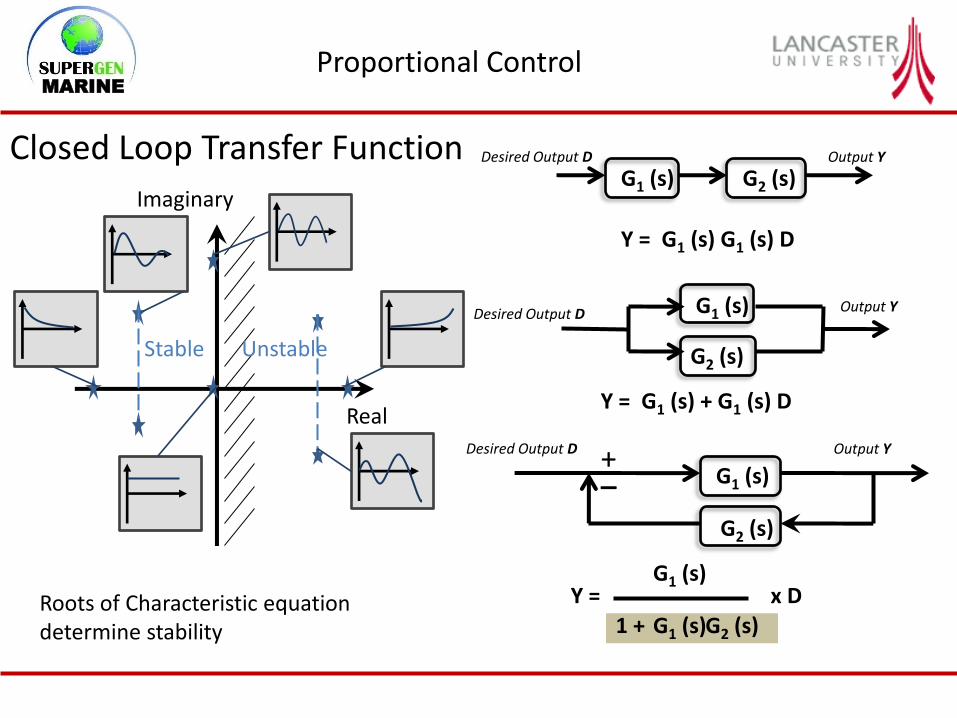
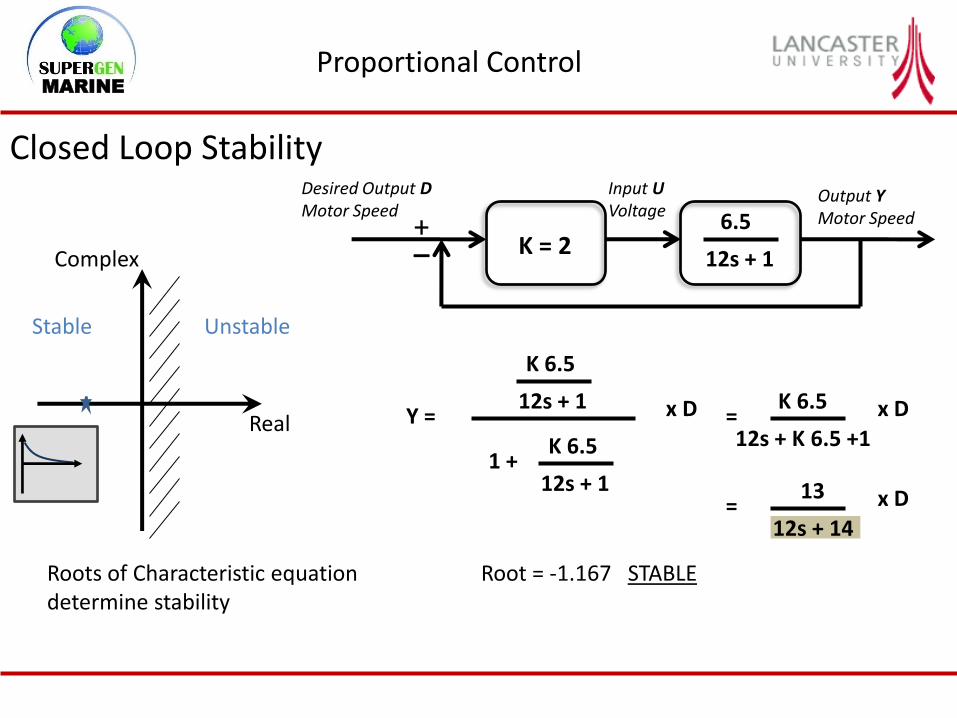
Roots of Characteristic equation determine stability
Closed Loop Transfer Function
Proportional Control
Output Y+_Desired Output D
G1 (s)
G2 (s)
Y = x D G1 (s)
1 + G1 (s)G2 (s)
G2 (s)G1 (s)Output YDesired Output D
Y = G1 (s) G1 (s) D
G2 (s)
G1 (s) Output YDesired Output D
Y = G1 (s) + G1 (s) D
UnstableStable
Real
Imaginary
MARINE
UnstableStable
Real
Complex
Output YMotor Speed
Input UVoltage
K = 2+_
Desired Output DMotor Speed
6.5
12s + 1
Y =
K 6.5
12s + 1
K 6.5
12s + 11 +
x D = K 6.5
12s + K 6.5 +1x D
Roots of Characteristic equation determine stability
Root = -1.167 STABLE
Closed Loop Stability
Proportional Control
= 13
12s + 14x D
MARINE
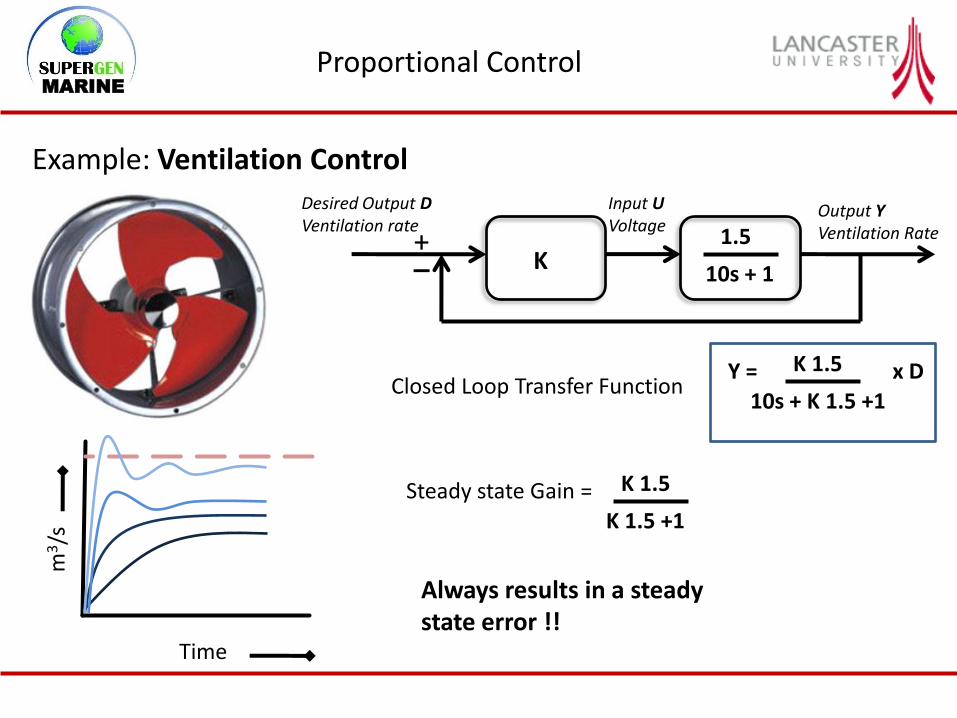
Proportional Control
Example: Ventilation Control
Output YVentilation Rate
Input UVoltage
K +_
Desired Output DVentilation rate
1.5
10s + 1
K 1.5
10s + K 1.5 +1
x D Y = Closed Loop Transfer Function
Steady state Gain = K 1.5
K 1.5 +1
Always results in a steady state error !!
Time
m3/s
MARINE
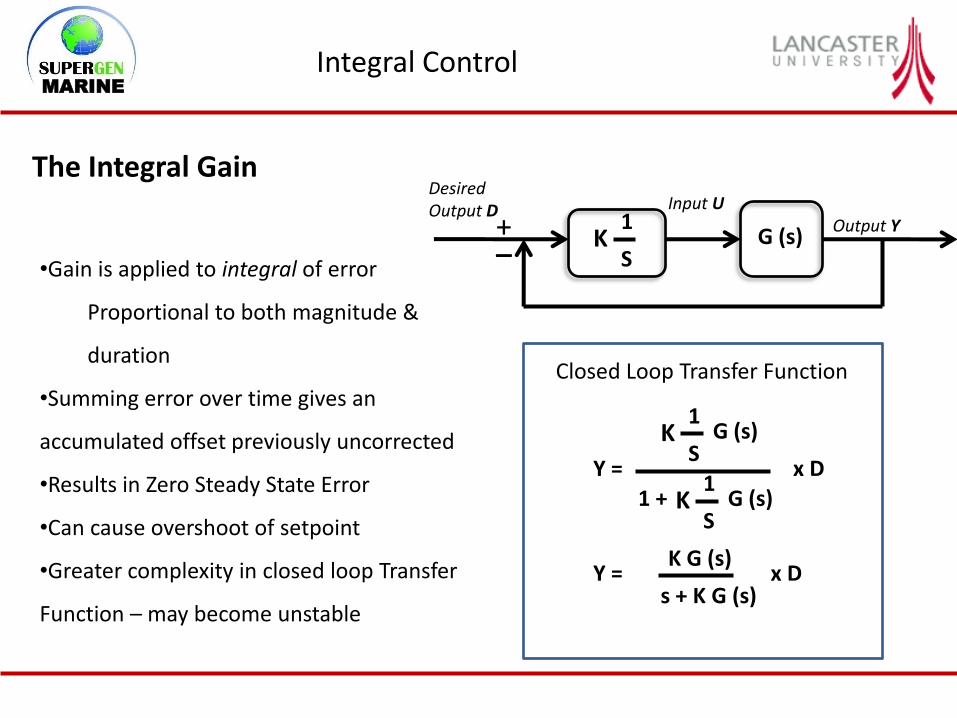
•Gain is applied to integral of error
Proportional to both magnitude &
duration
•Summing error over time gives an
accumulated offset previously uncorrected
•Results in Zero Steady State Error
•Can cause overshoot of setpoint
•Greater complexity in closed loop Transfer
Function – may become unstable
Output YInput U
K +_
Desired Output D
1
SG (s)
Y = x D
G (s)
1 +
K 1
S
K 1
SG (s)
K G (s)
s + K G (s)Y = x D
Closed Loop Transfer Function
Integral Control
The Integral Gain
MARINE
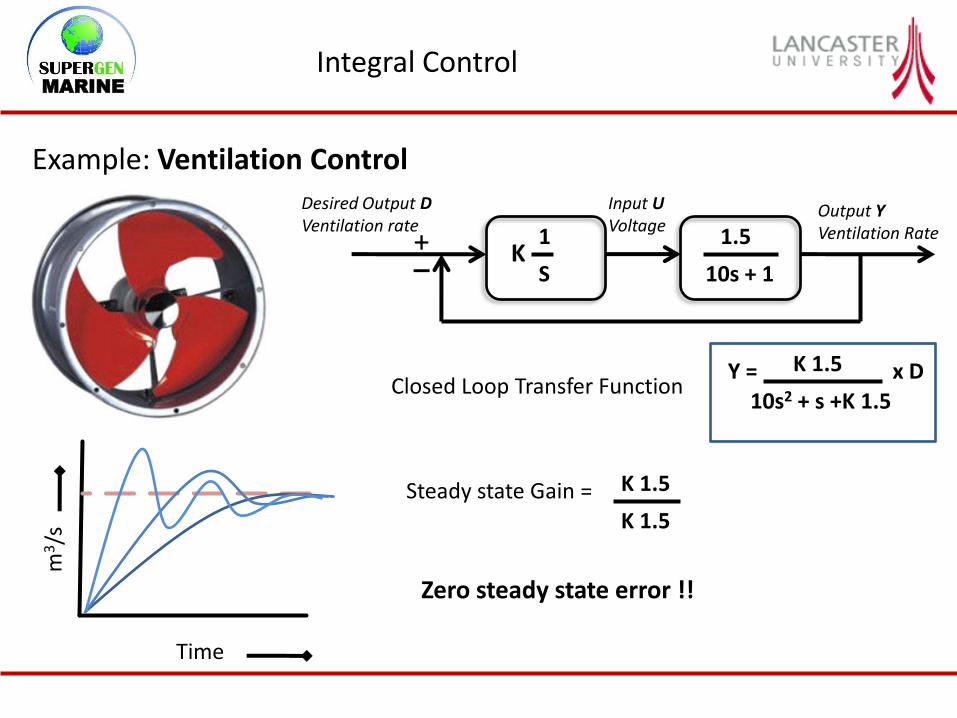
Integral Control
Example: Ventilation Control
Output YVentilation Rate
Input UVoltage
K +_
Desired Output DVentilation rate
1.5
10s + 1
K 1.5
10s2 + s +K 1.5
x D Y = Closed Loop Transfer Function
Steady state Gain = K 1.5
K 1.5
Zero steady state error !!
Time
m3/s
1
S
MARINE
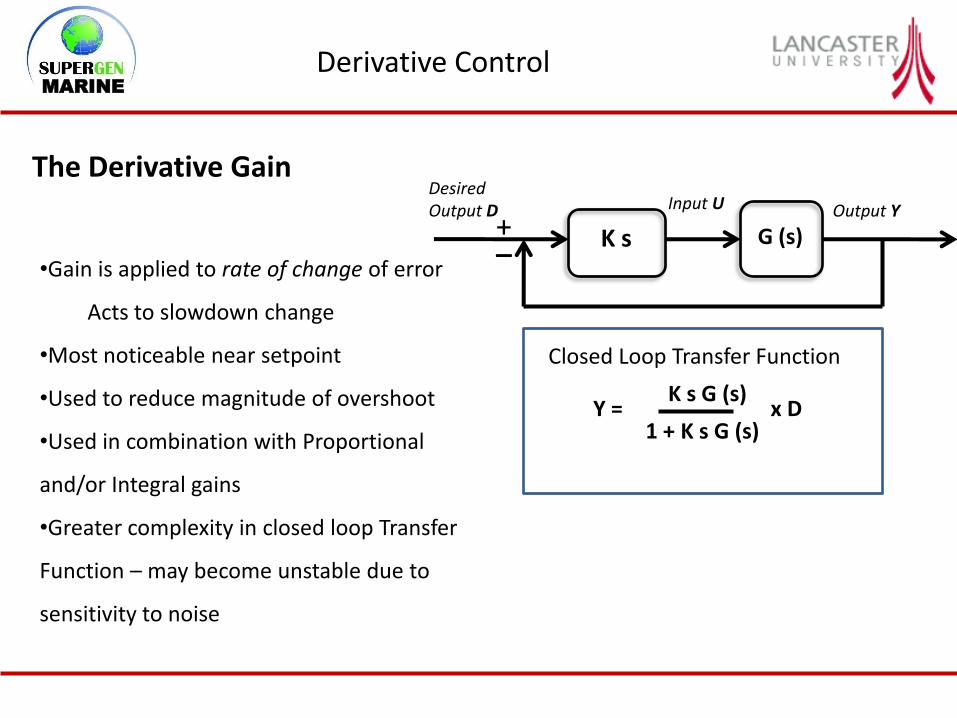
•Gain is applied to rate of change of error
Acts to slowdown change
•Most noticeable near setpoint
•Used to reduce magnitude of overshoot
•Used in combination with Proportional
and/or Integral gains
•Greater complexity in closed loop Transfer
Function – may become unstable due to
sensitivity to noise
Output YInput U
K s +_
Desired Output D
G (s)
K s G (s)
1 + K s G (s)Y = x D
Closed Loop Transfer Function
Derivative Control
The Derivative Gain
MARINE
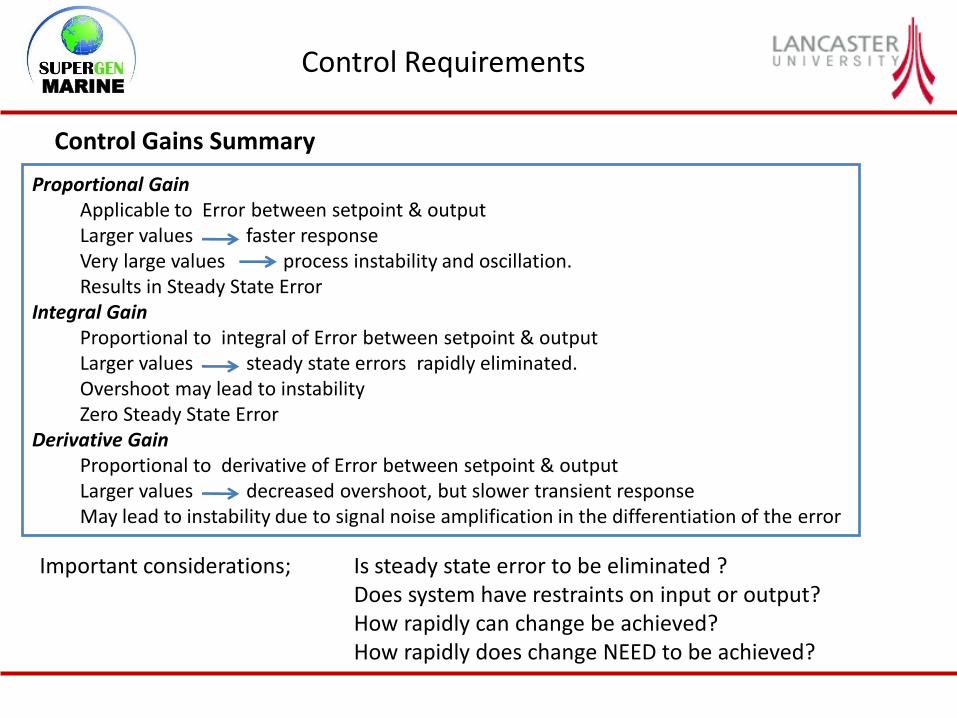
Control Requirements
Important considerations; Is steady state error to be eliminated ?Does system have restraints on input or output?How rapidly can change be achieved?How rapidly does change NEED to be achieved?
Proportional GainApplicable to Error between setpoint & outputLarger values faster responseVery large values process instability and oscillation. Results in Steady State Error
Integral GainProportional to integral of Error between setpoint & outputLarger values steady state errors rapidly eliminated. Overshoot may lead to instabilityZero Steady State Error
Derivative GainProportional to derivative of Error between setpoint & outputLarger values decreased overshoot, but slower transient response May lead to instability due to signal noise amplification in the differentiation of the error
Control Gains Summary
MARINE
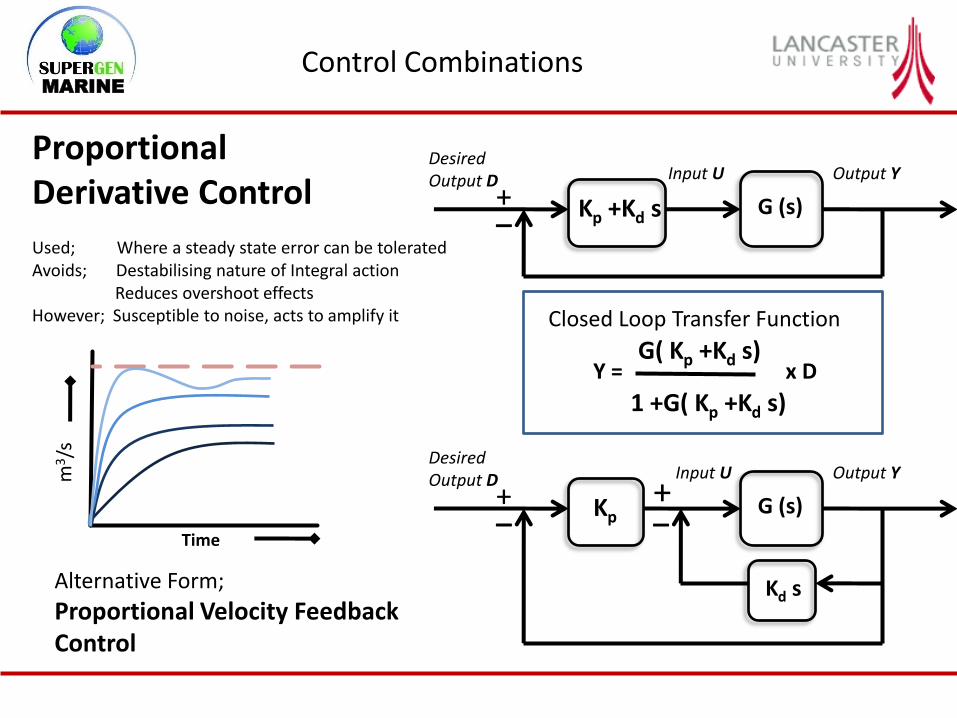
Control Combinations
Proportional Derivative Control
Output YInput U
Kp +Kd s +_
Desired Output D
G (s)
Y = x D
Closed Loop Transfer Function
G( Kp +Kd s)
1 +G( Kp +Kd s)
Used; Where a steady state error can be toleratedAvoids; Destabilising nature of Integral action
Reduces overshoot effects However; Susceptible to noise, acts to amplify it
Input U
Kp+_
Desired Output D
G (s)
Kd s
Output Y
_+
Alternative Form;
Proportional Velocity Feedback Control
Time
m3/s
MARINE
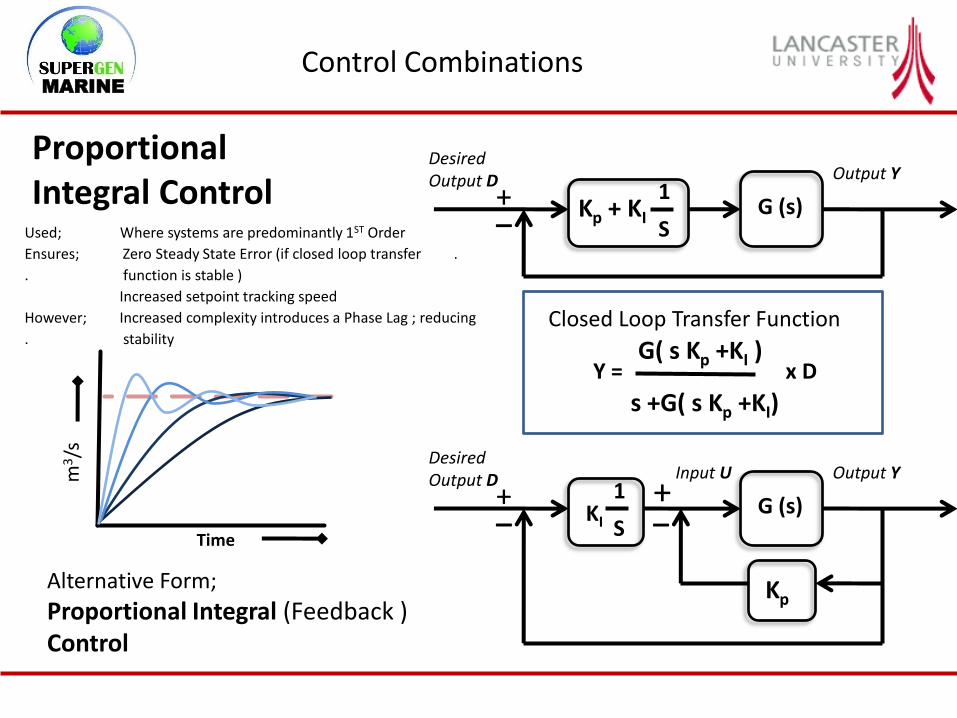
Control Combinations
Proportional Integral Control
Output Y
Kp + KI+_
Desired Output D
G (s)
Y = x D
Closed Loop Transfer Function
G( s Kp +KI )
s +G( s Kp +KI)
1
SUsed; Where systems are predominantly 1ST Order
Ensures; Zero Steady State Error (if closed loop transfer .
. function is stable )
Increased setpoint tracking speed
However; Increased complexity introduces a Phase Lag ; reducing
. stability
Input U
Kp
+_
Desired Output D
G (s)KI
Output Y
_+1
S
Alternative Form;
Proportional Integral (Feedback ) Control
Time
m3/s
MARINE
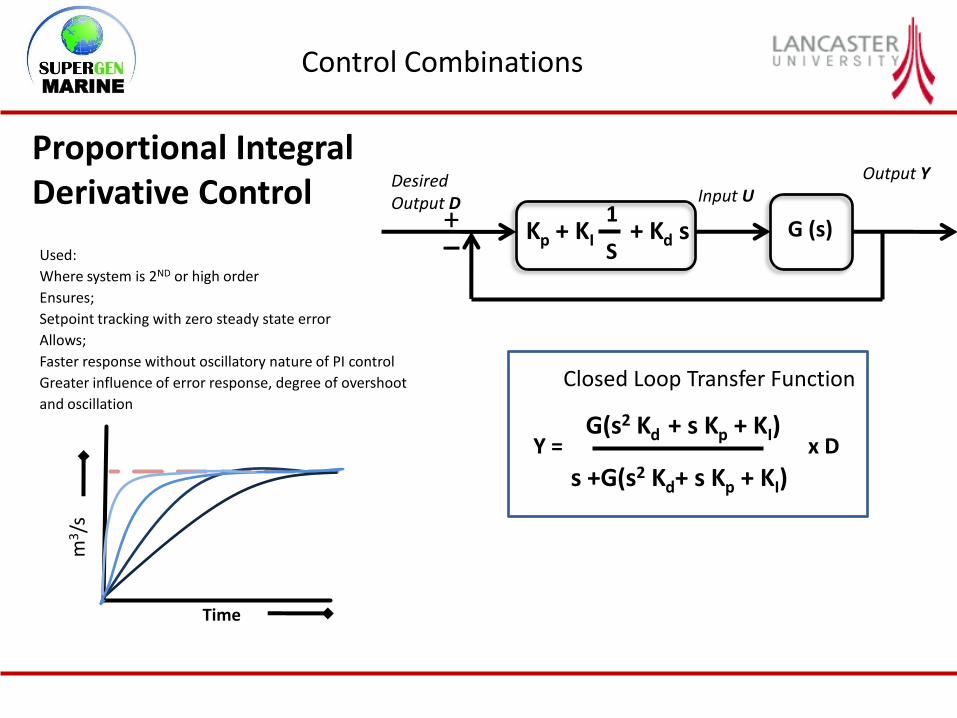
Control Combinations
Proportional Integral Derivative Control
Output YInput U
Kp + KI + Kd s +_
Desired Output D
G (s)
Y = x D
Closed Loop Transfer Function
G(s2 Kd + s Kp + KI)
s +G(s2 Kd+ s Kp + KI)
1
SUsed:
Where system is 2ND or high order
Ensures;
Setpoint tracking with zero steady state error
Allows;
Faster response without oscillatory nature of PI control
Greater influence of error response, degree of overshoot
and oscillation
Time
m3/s
MARINE
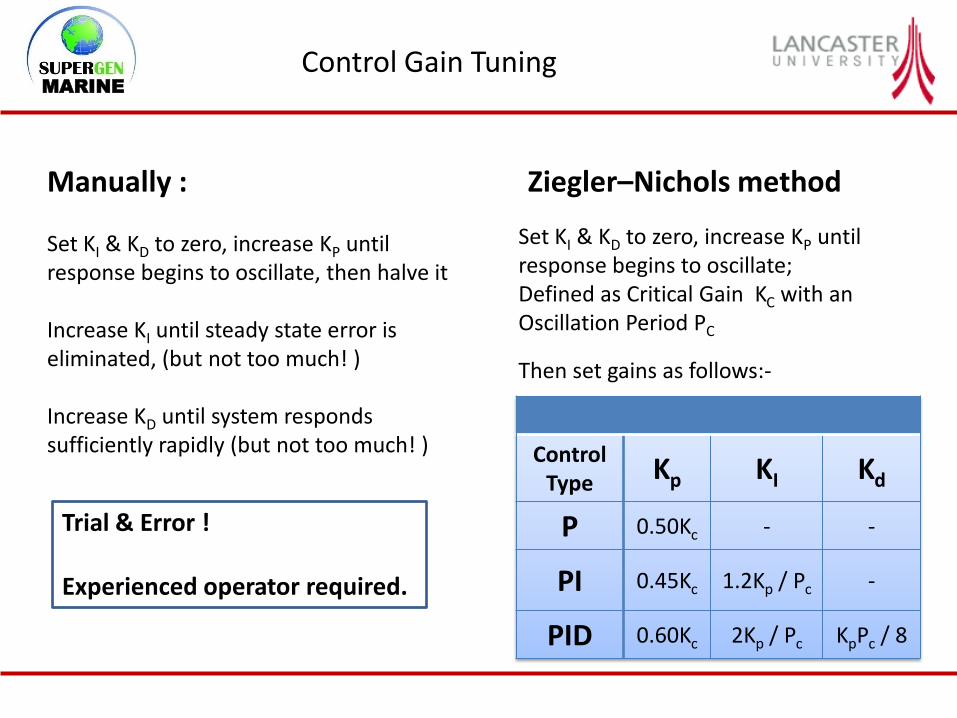
Control Gain Tuning
Manually :
Set KI & KD to zero, increase KP until response begins to oscillate, then halve it
Increase KI until steady state error is eliminated, (but not too much! )
Increase KD until system responds sufficiently rapidly (but not too much! )
Trial & Error !
Experienced operator required.
Control Type Kp KI Kd
P 0.50Kc - -
PI 0.45Kc 1.2Kp / Pc -
PID 0.60Kc 2Kp / Pc KpPc / 8
Ziegler–Nichols method
Set KI & KD to zero, increase KP until response begins to oscillate;Defined as Critical Gain KC with an Oscillation Period PC
Then set gains as follows:-
MARINE
Conclusions
Systems have been controlled mechanistically for millennia!
Development of electronics in early 20th Century paved the way for feedback amplifiers and feedback control
Control response is changeable based on feedback gains used.
Electronic control systems using PID structure used in 90% of industrial controllers
Applicable to LINEAR Systems
Advances in Classical Control:
Linearization by Feedback : Non-linearities are cancelled by feeding back inverse of system dynamics
Model-Based Gain calculation for higher order systems. Requires more control gains Proportional Integral PLUS (PIP)
Gain scheduling for time varying systems: Control gains are updated throughout operation
State Dependant Parameter (SDP) control; Gains are updated based on current state of system
MARINE
Classical Control Theory
Proportional - Integral - Derivative
Dr. Matt StablesDr. James Taylor
23/02/2010
Any Questions ?
Recommended

















