
Digital Measurement What Whereby How
Embedded Systems Engineering WS10Armin Wasicek
Digital Measurement 2
Overviewbull What
ndash Measurement Unitsndash Signals
(Classification Sampling Theorem Noise)bull Whereby
ndash Sensors hellipbull How
ndash Measurement Errorndash Measurement with microcontroller
(analog comparator ADC DAC Codes and value representation)ndash Data processing and filtering
Digital Measurement 3
Measurement Units
A measurement consists of the product of the measurand value and its unit
x = v ux the measurementv a number representing the measurand value (the physical or chemical
quantity property or condition that is measured)u the respective unit
bull Standardized by the international system of units(Systegraveme International dlsquoUniteacutes) SI-System
Digital Measurement 4
SI-System - Unitsbull 7 Base units
kg m s A K mol cd
bull Derived Units (examples)Hz [1s] N [(kgmiddotm)ssup2)W [(kgmiddotmsup2)s] Pa [kg(mmiddotssup2)]degC [T_kelvin ndash 27315] Joule [(kgmiddotmsup2)ssup2]
Digital Measurement 5
SI-System - Unit-Prefixkilo k 103 milli m 10-3
mega M 106 micro micro u 10-6
giga G 109 nano n 10-9
tera T 1012 pico p 10-12
peta P 1015 femto f 10-15
exa E 1018 atto a 10-18
zetta Z 1021 zepto z 10-21
yotta Y 1024 yocto y 10-24
Digital Measurement 6
Signals - Classification
Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 2
Overviewbull What
ndash Measurement Unitsndash Signals
(Classification Sampling Theorem Noise)bull Whereby
ndash Sensors hellipbull How
ndash Measurement Errorndash Measurement with microcontroller
(analog comparator ADC DAC Codes and value representation)ndash Data processing and filtering
Digital Measurement 3
Measurement Units
A measurement consists of the product of the measurand value and its unit
x = v ux the measurementv a number representing the measurand value (the physical or chemical
quantity property or condition that is measured)u the respective unit
bull Standardized by the international system of units(Systegraveme International dlsquoUniteacutes) SI-System
Digital Measurement 4
SI-System - Unitsbull 7 Base units
kg m s A K mol cd
bull Derived Units (examples)Hz [1s] N [(kgmiddotm)ssup2)W [(kgmiddotmsup2)s] Pa [kg(mmiddotssup2)]degC [T_kelvin ndash 27315] Joule [(kgmiddotmsup2)ssup2]
Digital Measurement 5
SI-System - Unit-Prefixkilo k 103 milli m 10-3
mega M 106 micro micro u 10-6
giga G 109 nano n 10-9
tera T 1012 pico p 10-12
peta P 1015 femto f 10-15
exa E 1018 atto a 10-18
zetta Z 1021 zepto z 10-21
yotta Y 1024 yocto y 10-24
Digital Measurement 6
Signals - Classification
Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
Digital Measurement 3
Measurement Units
A measurement consists of the product of the measurand value and its unit
x = v ux the measurementv a number representing the measurand value (the physical or chemical
quantity property or condition that is measured)u the respective unit
bull Standardized by the international system of units(Systegraveme International dlsquoUniteacutes) SI-System
Digital Measurement 4
SI-System - Unitsbull 7 Base units
kg m s A K mol cd
bull Derived Units (examples)Hz [1s] N [(kgmiddotm)ssup2)W [(kgmiddotmsup2)s] Pa [kg(mmiddotssup2)]degC [T_kelvin ndash 27315] Joule [(kgmiddotmsup2)ssup2]
Digital Measurement 5
SI-System - Unit-Prefixkilo k 103 milli m 10-3
mega M 106 micro micro u 10-6
giga G 109 nano n 10-9
tera T 1012 pico p 10-12
peta P 1015 femto f 10-15
exa E 1018 atto a 10-18
zetta Z 1021 zepto z 10-21
yotta Y 1024 yocto y 10-24
Digital Measurement 6
Signals - Classification
Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
Digital Measurement 4
SI-System - Unitsbull 7 Base units
kg m s A K mol cd
bull Derived Units (examples)Hz [1s] N [(kgmiddotm)ssup2)W [(kgmiddotmsup2)s] Pa [kg(mmiddotssup2)]degC [T_kelvin ndash 27315] Joule [(kgmiddotmsup2)ssup2]
Digital Measurement 5
SI-System - Unit-Prefixkilo k 103 milli m 10-3
mega M 106 micro micro u 10-6
giga G 109 nano n 10-9
tera T 1012 pico p 10-12
peta P 1015 femto f 10-15
exa E 1018 atto a 10-18
zetta Z 1021 zepto z 10-21
yotta Y 1024 yocto y 10-24
Digital Measurement 6
Signals - Classification
Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 5
SI-System - Unit-Prefixkilo k 103 milli m 10-3
mega M 106 micro micro u 10-6
giga G 109 nano n 10-9
tera T 1012 pico p 10-12
peta P 1015 femto f 10-15
exa E 1018 atto a 10-18
zetta Z 1021 zepto z 10-21
yotta Y 1024 yocto y 10-24
Digital Measurement 6
Signals - Classification
Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 6
Signals - Classification
Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 7
Signals ndash Sampling Theorem
bull Sampling is the process of converting an signal into a numeric sequence (analog value to a discrete value)
bull A band-limited (0-fmax) time dependent function f(t) can be reconstructed by sample-points if sampling frequency is more than the twice of fmax
fsample gt 2middotfmax
Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 8
Signals - Noise
bull Noise is a stochastic changing of currentvoltage of a signal which is caused by several affectsndash Thermal noisendash Atmospheric and GalacticCosmic noise
bull Impact of noise on the measurement should be minimized by appropriate design measures egndash Shielding to reduce the impact of external noisendash Appropriate hardware layout to eliminate avoidable sources of
internal noise(more details are given in the lecture bdquoHardware Design for Embedded Systemsldquo)
Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 9
Signals ndash Noise Types|X(f)| [dB]
10 100 1000 10000f log0
White Noise
|X(f)| [dB]
10 100 1000 10000f log0
Pink Noise
|X(f)| [dB]
10 100 1000 10000f log0
BrownRed Noise-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Blue Noise
|X(f)| [dB]
10 100 10000f log0
Purple Noise
1 fsup2-6dBOctave
+3dBOctave
-40-40
|X(f)| [dB]
10 100 1000 10000f log0
Gray Noise
1000
+6dBOctave
1 f-3dBOctave
White Noise (constant)Gray Noise (approxto const
psychoacoustic loudness)Pink Noise (-3dBOctave)BrownRed N (-6dBOctave)Blue Noise (+3dBOctave)Purple Noise (+6dBOctave)
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
10
Sensors ndash Some Definitions
bull A device that responds to a physical or chemical stimulus (such as heat pressure flow acceleration etc) and affects or generates an electrical signal
bull Facilitates to quantitatively or qualitatively acquire the physical or chemical properties of an object
bull A sensor is a transducer that converts the measurand into a signal carrying information
11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

11
Classification of Sensors (1)
bull Passive Sensorsndash A sensor whose physical measurement variable
controls or affects the energy of somethingsomeone else
ndash eg strain gauge (ldquoDMSrdquo) capacitive sensors
bull Active Sensorsndash A sensor that generates by itself some form of energy
as its measurement signalndash eg photo transistor piezo-electric sensors
12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

12
Classification of Sensors (2)
bull Type of measurandndash Mechanical quantities (eg pressure position force)ndash Thermal quantities (eg temperature heat flow)ndash Electrostatic and magnetic fieldsndash Radiation intensity (eg electromagnetic)ndash Chemical quantities (eg humidity gas)ndash Biological quantities (eg antigens antibodies)
13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

13
Classification of Sensors (3)
bull Nature of Output Signalndash analog output continuous signal in its magnitude andor temporal
(eg temperature)ndash digital output output signal in the form of discrete steps or states
(eg switch)
bull Physical Measurement Variablendash resistancendash inductancendash capacitancendash etc
selecting the most appropriatesensor is not a trivial task
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
14
Selecting a Sensor (1)bull What should be measured
ndash distance brightness hellipndash sometimes it is easier to measure a related value (voltage
instead of current)
bull Can we access the physicalchemical property directlyndash eg temperature within a melting pot
bull How should it be measuredndash measuring wheel propagation delay triangulationndash required precision
15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

15
Selecting a Sensor (2)bull Interface
ndash digital analog restrictions dynamics hellip
bull Requirements in the field of applicationndash mechanical stress (eg heat pressure etc)ndash costs (mass production vs prototype setup)
bull Effects biasing the measurementndash Never forget the physics behind the sensorndash Example
bull two infrared sensors (triangulation)bull almost all measurements are rubbishbull beam from sensor A was detected by senor B
16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

16
Some Common Sensing MethodsMeasurand Method
Displacement Position resistive capacitive opto-electronic Hall effect variable reluctance
Distancetriangulation measuring wheel radar echelon capacitiveinductiveproximity
Temperature Thermistor (NTC PTC) infrared radiation thermocouple
Pressure piezoresisitve capacitive piezoelectric strain gauge
Velocity Hall effect opto-electronic variable reluctance
Luminance photo-resistor photo-diode photo-transistor
17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

17
Resistive Sensors
bull Common passive sensors variation of resistance R
bull Potentiometer ndash changing L due to mechanical displacement (slide rotation)ndash liquid level sensor rotation and angle sensor
bull Thermistor ndash change of resistance due to change of NTC (negative k) PTC (positive k)ndash heat sensor heat flow sensor
bull Piezoresistive Sensors ndash resistor diffused in silicon compression decreases resistance tension increases resistancendash mechanical stress
R k T
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
18
Resistive Sensors
bull Potentiometer ndash eg angle sensor (105deg) 5k Ohm linear
bull Thermistor ndash eg PTC with range 0 hellip 55deg C
(figures taken from RS componentsonline catalogue)
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
19
Capacitive Sensorsbull Common passive sensors variation of capacitance C
bull Pressure sensorndash typically capacitor diffused into silicon chipndash distance between capacitor plates is varied due to mechanical stress
bull Liquid level sensorndash typically two or three electrodes (measured object itself forms one
electrode)
bull Capacitive proximity switchndash contact-free detection of liquids or solid materials
20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

20
Revolution Sensor
bull Speed indicator signal provided by DC fan (ESE-LU board)ndash special kind of onoff switchndash two pulses per revolution
(figure taken from ebmpapst DCfan data sheet)
21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

21
Optical Sensors (1)
bull Position Encoderndash incremental position encoder
(PC mouse)bull two square waves 90deg phase-
delayedndash absolute position encoder
(parallel)bull n wiresbull Gray encoded position
22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

22
Optical Sensors (2)
bull Incremental position encoder
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
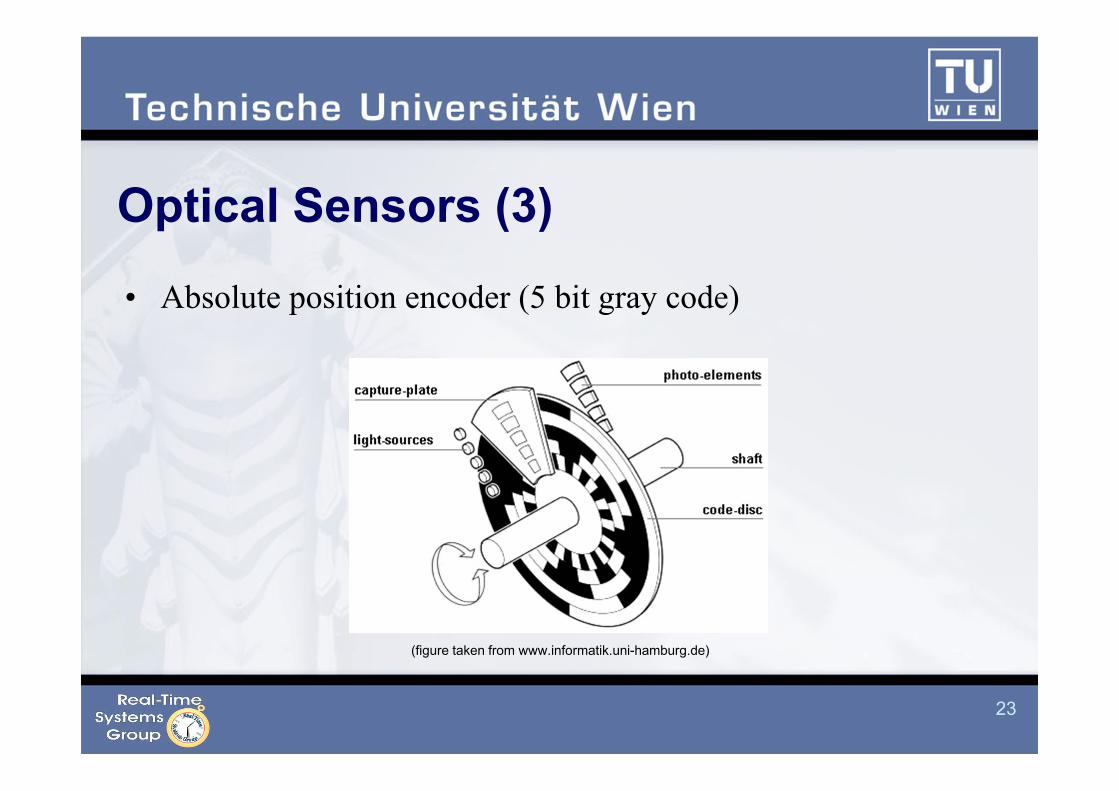
23
Optical Sensors (3)
bull Absolute position encoder (5 bit gray code)
(figure taken from wwwinformatikuni-hamburgde)
24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

24
Optical Sensors (4)
bull Luminance Sensorndash photo electric effect (photo transistor photo diode photo resistor)ndash output signal mostly analogndash characteristic linear amp non-linearndash some luminance sensors are programmable (gain alarm limit hellip)ndash eg NSL-19M51 photo resistor (ESE-LU board)
bull photo conductive cellbull resistance from 20-100K Ohm (light) to 20M Ohm (dark)
25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

25
Piezoelectric Sensor
bull Piezoelectric Effect (P and J Curie 1880)ndash ability of crystals to generate voltage as a response to
mechanical stressndash materials quartz (SiO2) cane sugar topazndash in static operation the behavior is similar to a capacitor
bull Active sensor for measuring pressure force or acceleration (eg piezoelectric microphone)
bull Above 846degK this piezoelectric effect is lost (Curie-Temperature)
26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

26
Hall Effect Sensor
bull Hall Effect (Edwin Hall 1879)ndash generation of potential difference
(Hall voltage) in a conductive material located in a stationary magnetic field through which electrical current is flowing
bull Active sensor for measuringndash displacementndash velocityndash inductive proximity switch
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
27
Ideal Sensor vs Real World
bull Ideal Sensorndash transforms highly linearly a single physical or chemical measurand
into an electrical signal while being resistant to environmental influences
bull Real Worldndash gain error clippingndash offset (bias) driftndash nonlinearityndash hysteresisndash digitization error
Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 28
Measurement Error
Measurement error is the difference between the measured and the actual value
e = x ndash a erel = (x-a)a
e measurement error (absolute)erel measurement error (relative) x measured valuea actual value
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
Digital Measurement 29
Measurement Error - Types
bull Systematic errorsndash reproducible (calculation measurement) measurement deviation
(eg bias drift) which is in principle correctable (eg calibration)ndash eg zero pointoffset scaling integral linearity differential linearity
history dependent
bull Conditional errorsndash caused by external influences eg Electromagnetic
interferencepulse (EMI EMP)
bull Stochastic errorsndash measurement error that is due to random causes (eg noise)
Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 30
Systematic measurement errors 1
(a) Zero pointoffset error(b) Scaling error
x(t)measure
x(t)entity
ezero
x(t)measure
x(t)entity
dx(t)entity = 1
dx(t)measure
1
1
(a) (b)
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
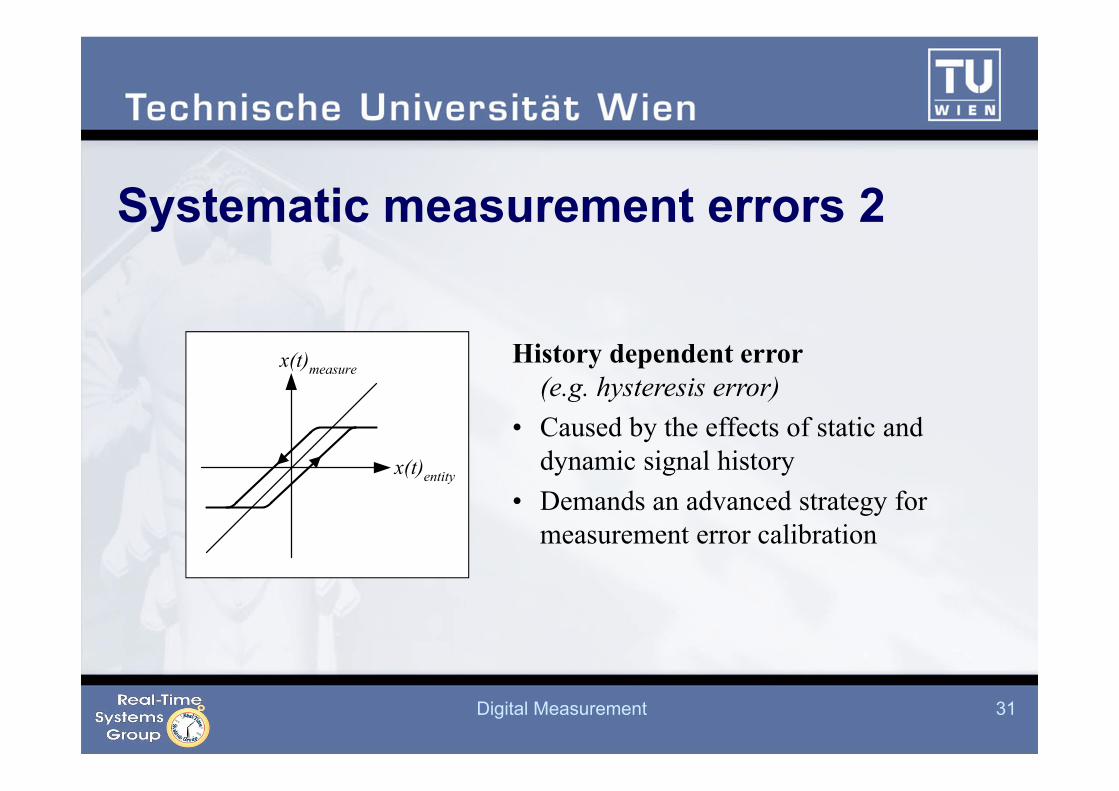
Digital Measurement 31
Systematic measurement errors 2
x(t)measure
x(t)entity
History dependent error(eg hysteresis error)
bull Caused by the effects of static and dynamic signal history
bull Demands an advanced strategy for measurement error calibration
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
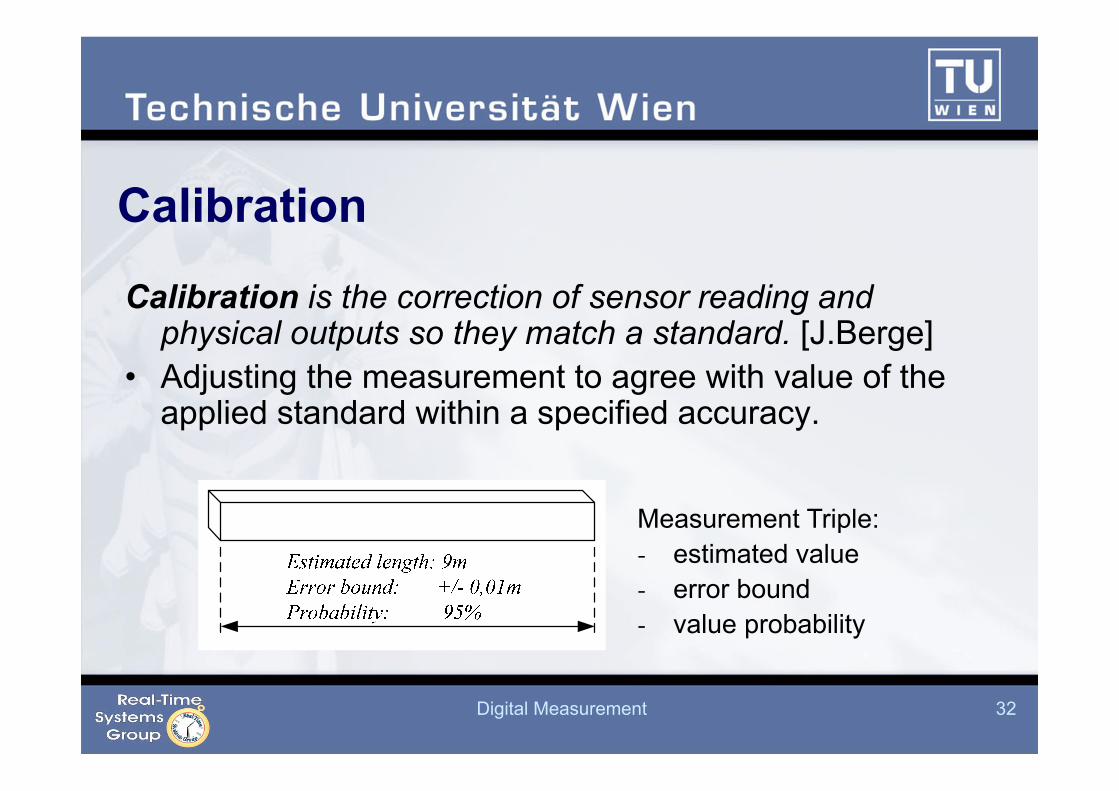
Digital Measurement 32
Calibration
Calibration is the correction of sensor reading and physical outputs so they match a standard [JBerge]
bull Adjusting the measurement to agree with value of the applied standard within a specified accuracy
Measurement Triple- estimated value- error bound- value probability
Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 33
Digital calibration model
Example The RT-Image is afflicted with a measurement error from the ADC (quantization linearization scalingoffset )
fraw(n)
Offset ErrorCorrection
Scaling ErrorCorrection Linearization RT-Image
(calibrated)
fcal(n)
RT-Image(raw)
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
Digital Measurement 34
Analog to Digital Converter - ADC
bull Changes a signallsquos time and value into discrete domain
bull Requires a sample and hold stage (SH)
bull Conversion techniquesmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 35
Digital to Analog Converter - DAC
bull Transforms a digital value with discrete time domain into analog value and time
bull Conversion techniquesndash gtmore details in bdquoTutorial Peripherals and IOldquo
Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 36
Processing of Measured Databull Classification of measured data
ndash Several measurements from the same instant from different sensors (sample)
ndash Several measurements from different instants from the same sensor (series)
bull Next Sensor Fusion and Digital Filtering
Sensors
Time
sampleseries
Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 37
Motivation for Sensor Fusionbull Sensor Deprivation
ndash eg loss of perception on object due to sensor break down
bull Limited spatial coverage ndash eg single measurement of water temperature returns temperature
estimation near the thermometer
bull Limited temporal coverage ndash eg set-up time of sensor limits achievable measurement frequency
bull Imprecision ndash eg inherent imprecision of deployed sensing element
bull Uncertaintyndash eg ambiguous observation due to missing features (occlusions)
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
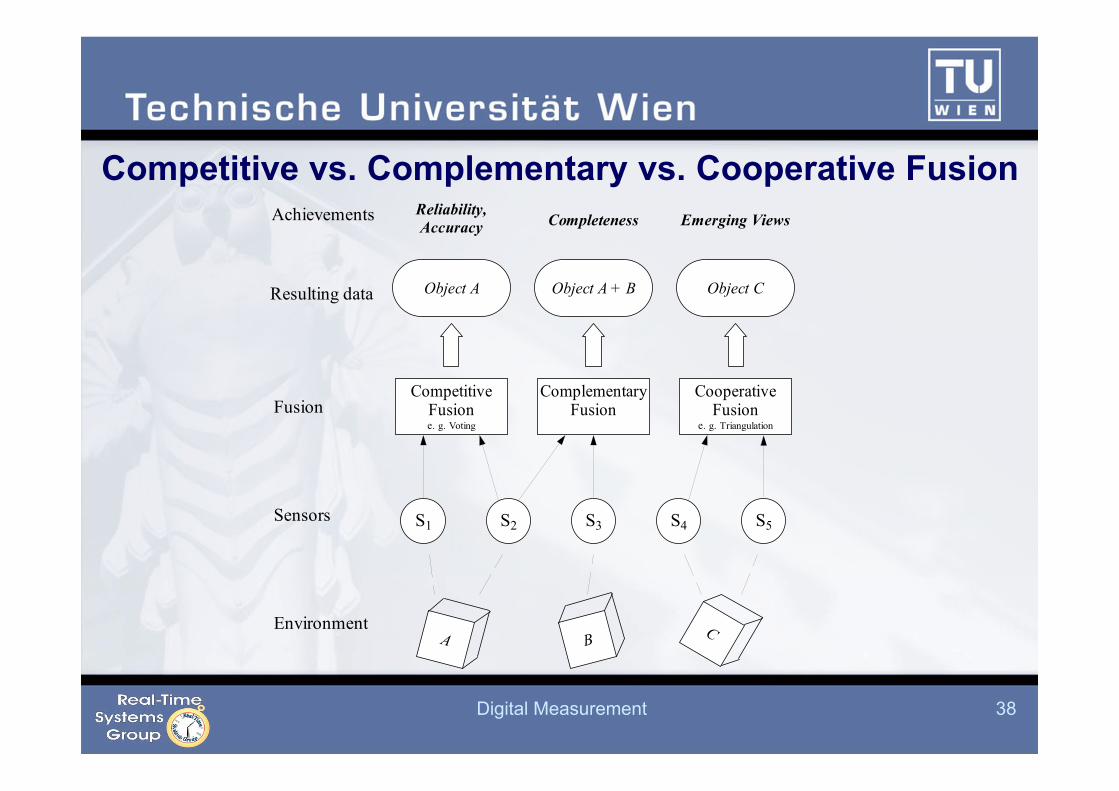
Digital Measurement 38
Competitive vs Complementary vs Cooperative Fusion
EnvironmentA
S1 S3 S4 S5S2
B C
CompetitiveFusione g Voting
CooperativeFusion
e g Triangulation
ComplementaryFusion
Sensors
Fusion
Object AResulting data Object A + B Object C
Achievements ReliabilityAccuracy Completeness Emerging Views
Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 39
Marzullorsquos Algorithm
value range
bull Each sensor measurement is represented as an interval
bull Maximum t sensors (out of n) are expected to be faulty
bull Result is a single interval M that covers all intersections shared by at least n ndash f intervals
n=4 sensors
f =1 expected to be
faulty
Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 40
Confidence-weighted averagingbull Each measurement is assigned a
confidence marker indicating the uncertainty of the measurement value
bull Use statistical variance as measure for uncertainty
bull Fusion operations use both properties and yield a result of value and confidence marker
bull Confidence marker corresponds to variances
Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 41
Filtering a Series of Measurements
bull A filter is a layer designed to block certain things whilst letting others through
bull Primary filtering question what is the intended information and what should be filtered out
bull Typically filter out noisebull Careful design not to remove the intended informationbull Digital filter input and output are treated as time discrete
signals
Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 42
Moving Average Filter
bull Very simple implementationbull Filter kernel h[n] = 1Mbull Well-suited for signal restoration (eg noise reduction) bull But does not cut off unwanted frequencies very wellbull Tradeoff noise reduction versus rise time
Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45

Digital Measurement 43
Moving Average Filter (2)
M=11 M=33
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
Digital Measurement 44
bull Measurements have (systematic stochastic) errorsbull Chosen sensor type has to be aligned to (physical)
characteristics of the measurandbull Calibration (works on some of the systematic errors)bull Signal and noise typesbull Fusing samples with Marzullolsquos algorithm Confidence-
Weighted Averaginghellipbull Filtering series with Moving Average hellip
Summary
THE END
Thanks for your attention
45
THE END
Thanks for your attention
45
Recommended

















