-
Yaw Stability Improvement for Four-Wheel Active Steering
Vehicle
using Sliding Mode Control
Norhazimi Hamzah Faculty of Electrical Engineering
Universiti Teknologi MARA Pulau Pinang, Malaysia
[email protected]
Yahaya Md Sam, Hazlina Selamat Faculty of Electrical
Engineering
Universiti Teknologi Malaysia Johor, Malaysia
[email protected], [email protected]
M Khairi Aripin Control, Instrumentation & Automation
Department.
Faculty of Electrical Engineering, UTeM Melaka, Malaysia
[email protected]
Muhamad Fahezal Ismail Industrial Automation Section
UniklMfi Selangor, Malaysia
[email protected]
Abstract Active steering control is one of the approach that can
be used to improve the vehicles lateral and yaw stability. By
combining active front steering and active rear steering control,
the vehicles handling and stability can be improved via four wheel
active steering (4WAS) control. In this paper, a robust control
algorithm of sliding mode control is designed for 4WAS vehicle.
Single track 2 d.o.f linear model is utilized for controller design
and simulation purpose. Simulation for 4WAS and front steering
(AFS) is carried out in Simulink for step steer and double lane
change maneuver to verify the effectiveness of the proposed control
system. The result shows that the 4WAS perform better than the AFS
in tracking the desired response trajectory.
Keywords- Active Steering Control, Four Wheel Active Steering,
Yaw Stability Control, Sliding Mode Control
I. INTRODUCTION Vehicle stability control (VSC) is one of the
important
topics in vehicle dynamics where ongoing research is actively
conducted. The main objective of vehicle stability control is to
maintain the vehicle keep on the road or desired track/path.
Lateral force that exists in vehicle dynamic motion has great
influence to the vehicle stability. According to [1], yaw stability
control system that purely based on kinematic and dynamics motion
of vehicle is one of vehicle lateral control system that have been
developed by researchers. As reported [2], there are three main
control objectives of vehicle yaw stability control system which
are yaw rate control, sideslip control and combination of both yaw
rate and sideslip. The purpose of yaw stability control system is
to keep the vehicles yaw rate as closer as possible to the nominal
motion expected by the driver. Conventionally, the lateral force of
vehicle is being controlled by steering system that directly
commanded by the driver.
Nowadays, vehicle dynamics studies is focusing on active
steering control to improve the yaw stability control system. In
general, there are three techniques for active steering control
have been developed that are active front steering (AFS), rear
wheel active steering (ARS) and four wheel active steering (4WAS).
In AFS, front wheel steer angle is a sum of steer angle commanded
by the driver and a corrective steer angle that generated by the
designed controller. AFS is used to improve the handling and
stability performance. The performance is good when vehicle is
driving or handling at steady state condition or tires forces is in
linear region but it is less effective when vehicle dynamics become
nonlinear or tires forces approaches their adhesion limit. The ARS
on the other hand is used to improve the vehicle transient response
for low speed cornering manoeuvres. In order to enhance the
manoeuvrability at low speed and the handling stability at high
speed, combination of active front steering and active rear
steering or so called four wheel active steering (4WAS) has been
proposed in [3], [4], and [5]. By implementing 4WAS control, the
lateral and yaw motion can be controlled simultaneously using two
independent control inputs via active front steering and active
rear steering where it is impossible to control lateral and yaw
motion using active front or active rear steering only.
In previous research works, 4WAS control has been designed based
on various control algorithms. In [3], a decentralized nonlinear P
and PI active steering control is designed for active front and
active rear steering control but robustness issue is not discusses
intensively. Optimal control theory is implemented in [4] for
optimal model following control design that consists of feedforward
and feedback control but simulation and comparison analysis with
other controller is not carried out. In [5], sliding mode control
is designed for uncertainties parameters in 4WAS vehicle.
2012 IEEE 8th International Colloquium on Signal Processing and
its Applications
978-1-4673-0961-5/12/$31.00 2012 IEEE 127
-
However, comparison between controlled 4WAS and uncontrolled AFS
is insufficient.
In this paper, a prominent sliding mode control algorithm is
utilized for both 4WAS and AFS vehicle due to the robustness
properties against parameters uncertainties and disturbances. This
paper is organized in five sections as overview briefs in Section
I, vehicle dynamics modelling for controller design and simulation
in Section II, robust control design of sliding mode control in
Section III. The simulations and analysis is carried out in Section
V and this research paper concludes in Section V.
II. VEHICLE DYNAMICS MODEL
A. 4WAS Single Track Model
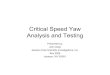
Single track model or also called bicycle model in [4] as shown
in Figure 1 is utilized to describe the dynamic model of 4WAS
vehicle. This model used to design the controller for yaw rate and
lateral motion.
Figure 1. Single track model 2 d.o.f
In simplest form of planar motion, 2 d.o.f linear model for yaw
and lateral dynamic motion (roll motion is neglected) are describe
in the following equations:
Lateral motion;
yryfxx FFrmVmV +=+ (1) Yaw rate;
yryfz bFaFrI = (2) where m is vehicle mass, xV is vehicle
forward speed, is vehicle body sideslip, r is yaw rate, a/b is
distance from front/rear axle to center of gravitiy (CG), f and r
are front and rear steering angle, zI is yaw moment of inertia
and
yryf FF , are lateral force of front and rear tires. With
assumptions linear relationship between tire lateral force and tire
slip angle;
ffyf CF = (3)
rryr CF = (4)
where fC and rC are front and rear cornering stiffness
respectively. Slip angles of front and rear tires, f and r can be
obtained by using the following equations;
xff V
ar= (5)
xrr V
br= (6)
By substitutes and rearrange equations (3), (4), (5) & (6)
into (1) & (2), state space model can be obtained as
follows;
BuAxx += (7)
+
=
r
f
bbbb
raaaa
r
2221
1211
2221
1211
(8)
where
212111,
x
rf
x
rf
mV
bCaCa
mVCC
a
=
+= (9)
xz
rf
z
rf
VICbCa
aI
bCaCa
22
2221 ,+
=
= (10)
x
r
x
f
mVC
bmVC
b == 1211 , (11)
z
r
z
f
IbC
bI
aCb == 1221 , (12)
where
In equation (5), noted that front wheel steering angle, f is sum
of additional/corrective steer angle by controller, c and steering
wheel angle demanded/commanded by the driver, d ;
cdf += (13)
III. CONTROLLER DESIGN FOR 4WAS VEHICLE The purpose of the
control system is to maintain the vehicle
actual response close to the desired response determined by the
reference model. To ensure robustness of the system against
parameter uncertainties and external disturbance [6], sliding mode
controller is chosen as the steering controller.
A. Vehicle Reference Model The desired vehicle handling
performance is expressed as
a reference model which has zero vehicle sideslip angle at the
center of gravity and the desired yaw rate is computed based on the
steering input and the vehicle speed.
r
2012 IEEE 8th International Colloquium on Signal Processing and
its Applications
128
-
The reference model [5] is represented by the following: ddddd
uBxAx += (14)
*
//
/100/1
frrd
d
rd
d
kk
rr
+
=
(15)
where
)1(,0 2
x
xrdd KVL
Vkk+
== and
=
rf Ca
Cb
LmK2
(16)
B. Sliding Mode Controller Design The first step in designing
the sliding mode controller is to
choose a suitable sliding surface. Then, the control input is
design to drive the system trajectories to the sliding surface so
that the closed loop dynamics are completely governed by the
equation that define the surface.
The difference between the actual response and the desired
response define the tracking error.
==
d
dd rr
xxe
(17)
Then, the sliding surface, 0= is defined as follows,
Ce= (18) where C is a full rank constant matrix. The matrix C is
chosen such that CB is nonsingular. Taking derivative on equ.
18,
[ ] [ ][ ][ ]dddd
dddddd
ddddd
uBBuxAAAeCuBBuxAAxAxAxC
uBxABuAxCxxCeC
++=
++=
++===
)(
)( (19)
Based on constant reaching law method [7],
)sgn( Q= (20) Thus,
[ ])sgn()(
)()(1
1
QCB
uBxAAAeCCBu dddd
+= (21)
The reaching law approach will establish the reaching condition
which is the condition where the state will move toward and reach
the sliding surface as well as specifies the dynamic characteristic
of the system during the reaching phase.
C. Stability Analysis The stability of the closed loop system is
determined using
Lyapunov stability theory. Let the positive definite function
;
TV 5.0= (22)
be a Lyapunov function candidate. The time derivative of V along
the system trajectories is calculated as
[ ]ddddTT uBBuxAAAeCV ++== )( (23) Replacing equation (21) into
(23)
[ ]
QQ
uBQCB
uBxAAAeCCBB
xAAAe
CV
Tdd
dddd
dd
T
+
++
=
)sgn(
)sgn()(
)()(
)(
1
1
(24)
where )sgn( T=
For 0>Q , then 0
-
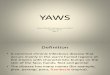
0 1 2 3 4 5 6-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
t(sec)
veh
icle
sides
lip a
ngle
(deg)
desired4WASAFS
1 1.2 1.4-0.8-0.6-0.4-0.2
00.20.4
Figure 2. Vehicle sideslip angle response with J-turn
maneuver
0 1 2 3 4 5 6-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
t(sec)
yaw
ra
te(ra
d/s)
desired4WASAFS
1.2 1.4 1.60.25
0.3
0.35
Figure 3. Yaw rate response with J-turn maneuver
2012 IEEE 8th International Colloquium on Signal Processing and
its Applications
130
-
0 1 2 3 4 5 6-5
-4
-3
-2
-1
0
1
2
3
4
5
t(sec)
veh
icle
sid
eslip
ang
le(de
g)
desired4WASAFS
Figure 4. Vehicle sideslip angle response with lane change
maneuver
0 1 2 3 4 5 6-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
t(sec)
yaw ra
te(ra
d/s)
desired4WASAFS
Figure 5. Yaw rate response with lane change maneuver
2012 IEEE 8th International Colloquium on Signal Processing and
its Applications
131
-
V. CONCLUSION A sliding mode controller for 4WAS vehicle is
presented in
this paper. The application of SMC enable the lateral and yaw
motion of 4WAS to both simultaneously trace the response of the
reference model exactly, which is better than AFS.
ACKNOWLEDGMENT The authors would like to thank UTM (Vot
number
Q.J130000.2623.04J48), UiTM, UTeM and MoHE for supporting the
present work.
REFERENCE [1] R. Rajamani, "Lateral Vehicle DynamicsVehicle
Dynamics and
Control," Springer US, 2006, pp. 15-49.
[2] W. J. Manning and D. A. Crolla, "A review of yaw rate and
sideslip controllers for passenger vehicles," Transactions of the
Institute of Measurement and Control, vol. 29, pp. 117-135,
2007.
[3] R. Marino, S. Scalzi, and F. Cinili, "Nonlinear PI front and
rear steering control in four wheel steering vehicles," Vehicle
System Dynamics, vol. 45, pp. 1149-1168, 2007.
[4] B. Li and F. Yu, "Optimal model following control of
four-wheel active steering vehicle," in 2009 IEEE International
Conference on Information and Automation, ICIA 2009, 2009, pp.
881-886.
[5] F. Du, J. S. Li, L. Li, and D. H. Si, "Robust control study
for four-wheel active steering vehicle," in Proceedings -
International Conference on Electrical and Control Engineering,
ICECE 2010, 2010, pp. 1830-1833.
[6] N. Hamzah, Sam, Y.M. and Shuib, N.M., "Longitudinal Tire
Slip Control Utilizing Sliding Mode Control," in The Second
International Conference on Control, Instrumentation and
Mechatronic Engineering (CIM09), Malacca, Malaysia, 2009, pp.
62-65.
[7] J. Y. Hung, W. Gao, and J. C. Hung, "Variable structure
control. A survey," IEEE Transactions on Industrial Electronics,
vol. 40, pp. 2-22, 1993.
2012 IEEE 8th International Colloquium on Signal Processing and
its Applications
132
/ColorImageDict > /JPEG2000ColorACSImageDict >
/JPEG2000ColorImageDict > /AntiAliasGrayImages false
/CropGrayImages true /GrayImageMinResolution 200
/GrayImageMinResolutionPolicy /OK /DownsampleGrayImages true
/GrayImageDownsampleType /Bicubic /GrayImageResolution 300
/GrayImageDepth -1 /GrayImageMinDownsampleDepth 2
/GrayImageDownsampleThreshold 2.00333 /EncodeGrayImages true
/GrayImageFilter /DCTEncode /AutoFilterGrayImages true
/GrayImageAutoFilterStrategy /JPEG /GrayACSImageDict >
/GrayImageDict > /JPEG2000GrayACSImageDict >
/JPEG2000GrayImageDict > /AntiAliasMonoImages false
/CropMonoImages true /MonoImageMinResolution 400
/MonoImageMinResolutionPolicy /OK /DownsampleMonoImages true
/MonoImageDownsampleType /Bicubic /MonoImageResolution 600
/MonoImageDepth -1 /MonoImageDownsampleThreshold 1.00167
/EncodeMonoImages true /MonoImageFilter /CCITTFaxEncode
/MonoImageDict > /AllowPSXObjects false /CheckCompliance [ /None
] /PDFX1aCheck false /PDFX3Check false /PDFXCompliantPDFOnly false
/PDFXNoTrimBoxError true /PDFXTrimBoxToMediaBoxOffset [ 0.00000
0.00000 0.00000 0.00000 ] /PDFXSetBleedBoxToMediaBox true
/PDFXBleedBoxToTrimBoxOffset [ 0.00000 0.00000 0.00000 0.00000 ]
/PDFXOutputIntentProfile (None) /PDFXOutputConditionIdentifier ()
/PDFXOutputCondition () /PDFXRegistryName () /PDFXTrapped
/False
/CreateJDFFile false /Description > /Namespace [ (Adobe)
(Common) (1.0) ] /OtherNamespaces [ > /FormElements false
/GenerateStructure false /IncludeBookmarks false /IncludeHyperlinks
false /IncludeInteractive false /IncludeLayers false
/IncludeProfiles true /MultimediaHandling /UseObjectSettings
/Namespace [ (Adobe) (CreativeSuite) (2.0) ]
/PDFXOutputIntentProfileSelector /NA /PreserveEditing false
/UntaggedCMYKHandling /UseDocumentProfile /UntaggedRGBHandling
/UseDocumentProfile /UseDocumentBleed false >> ]>>
setdistillerparams> setpagedevice