Embed Size (px)
Citation preview
Wavefront Sensing II
Richard Lane
Department of Electrical and Computer Engineering
University of Canterbury
Contents
• Session 1 – Principles
• Session 2 – Performances
• Session 3 – Wavefront Reconstruction
Session 2 Performances
• Geometrical wavefront sensing take 2
• The inverse problem
• The astronomical setting
• The basic methods
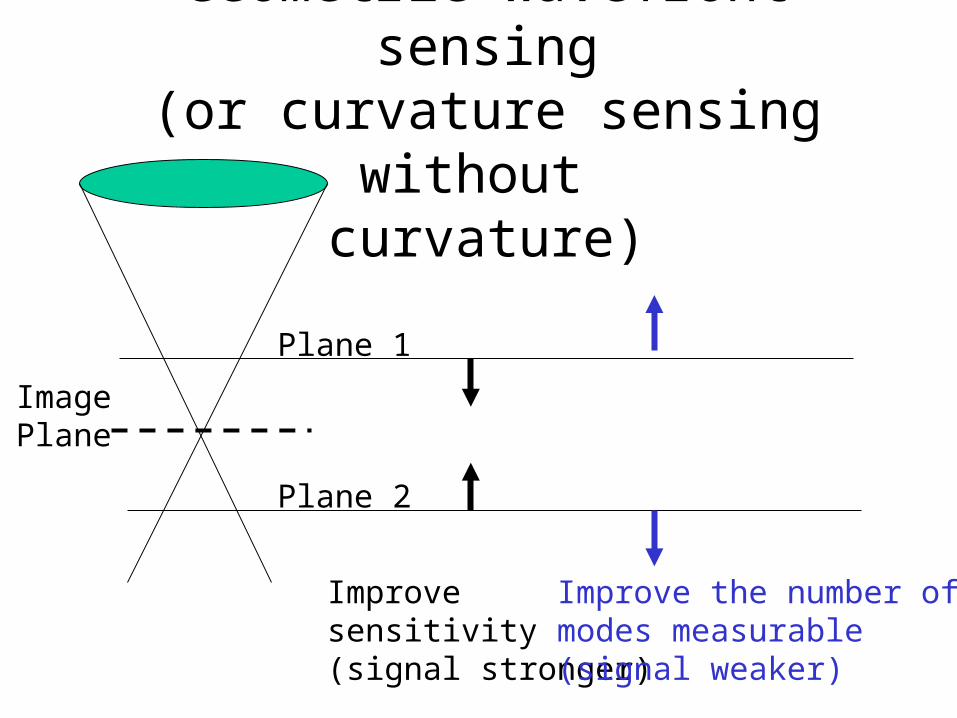
Geometric wavefront sensing(or curvature sensing without
curvature)
Plane 1
Plane 2
ImagePlane
Improve sensitivity(signal stronger)
Improve the number of modes measurable(signal weaker)
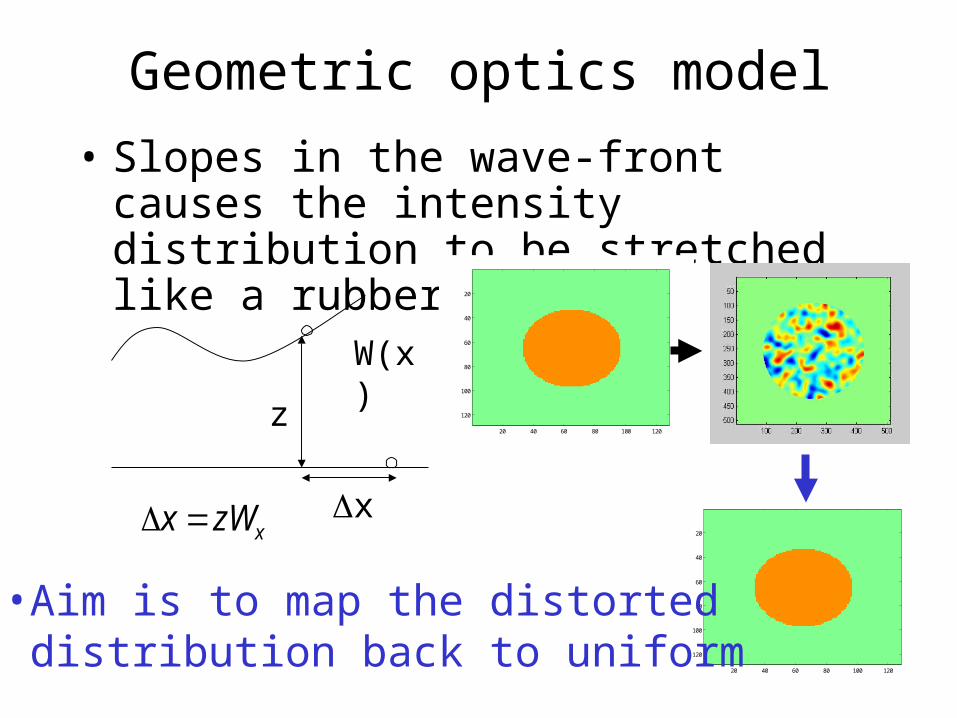
• Slopes in the wave-front causes the intensity distribution to be stretched like a rubber sheet
Geometric optics model
z
W(x)
xxzWx
20 40 60 80 100 120
20
40
60
80
100
120
20 40 60 80 100 120
20
40
60
80
100
120
•Aim is to map the distorted distribution back to uniform
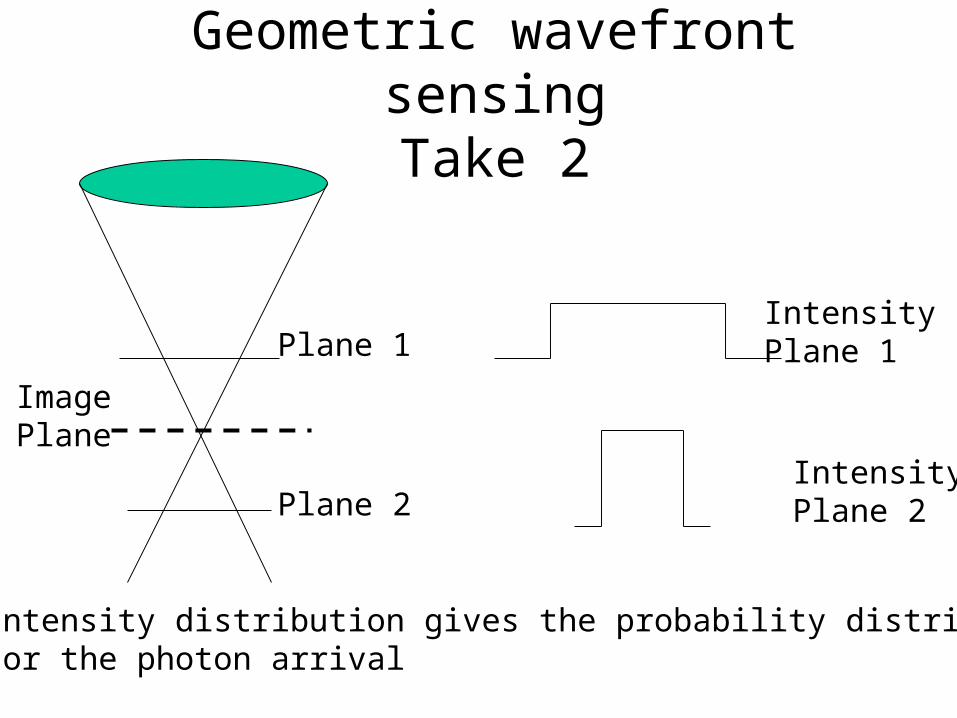
Geometric wavefront sensingTake 2
Plane 1
Plane 2
ImagePlane
Intensity Plane 1
Intensity Plane 2
Intensity distribution gives the probability distributionFor the photon arrival
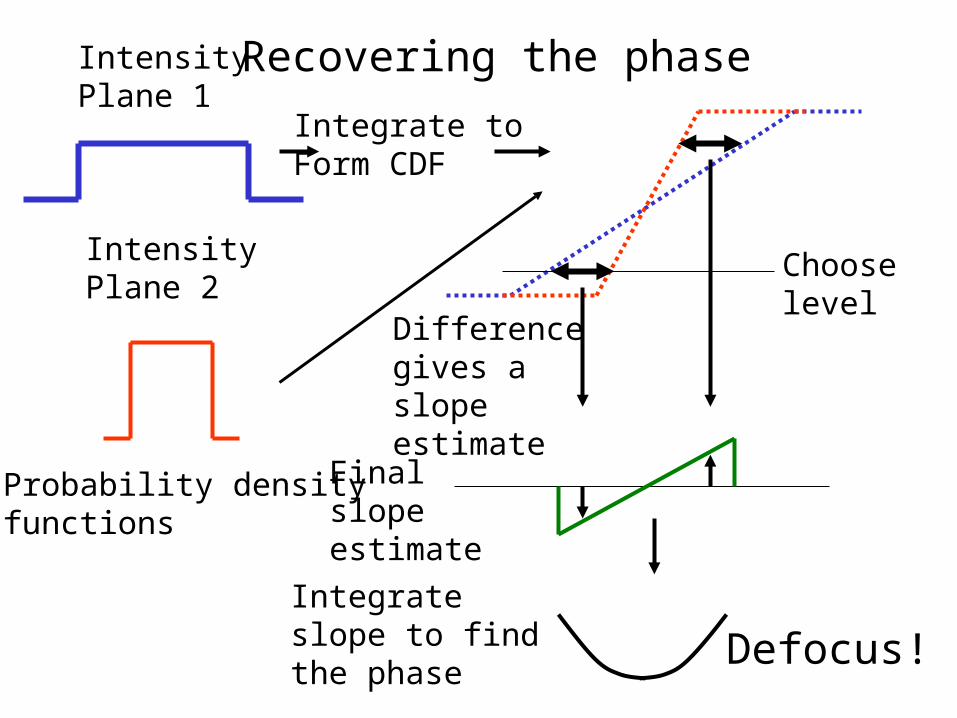
Intensity Plane 1
Intensity Plane 2
Probability densityfunctions
Integrate toForm CDF
Chooselevel
Difference gives a slope estimate
Finalslope estimate
Integrateslope to findthe phase
Recovering the phase
Defocus!
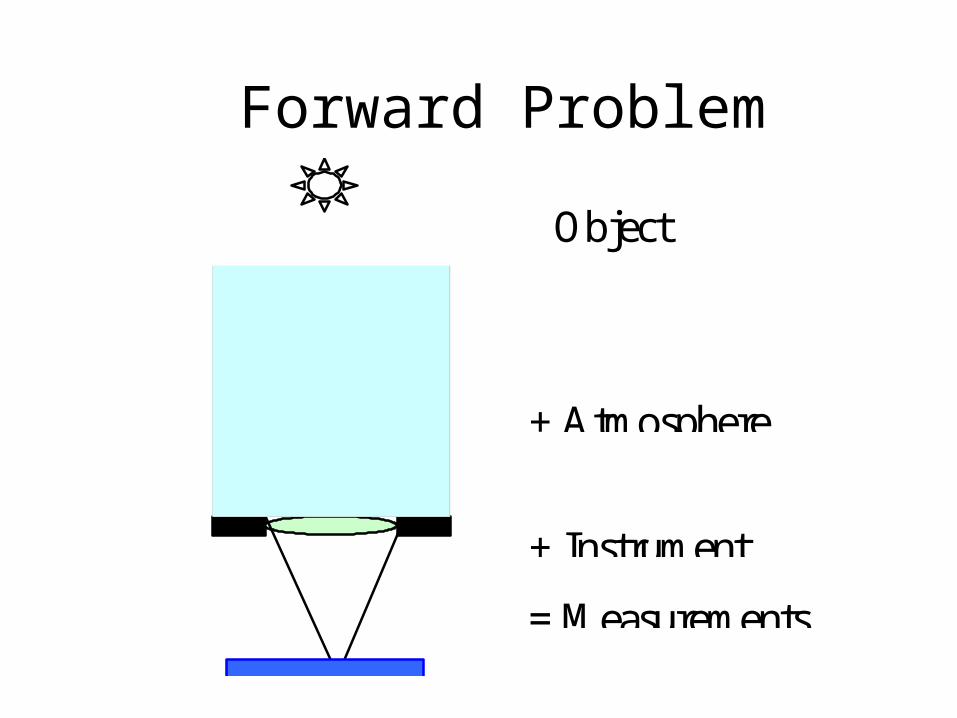
Forward Problem
Object
+ Atmosphere
= Measurements
+ Instrument
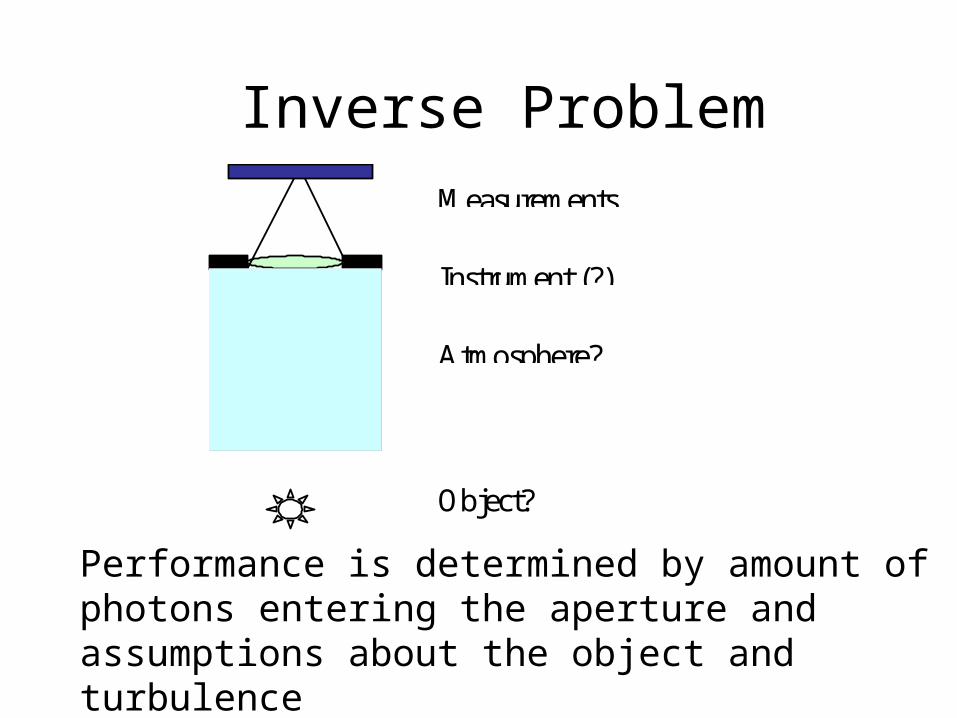
Inverse Problem
Object?
Atmosphere?
Measurements
Instrument (?)
Performance is determined by amount of photons entering the aperture and assumptions about the object and turbulence
Imaging a star
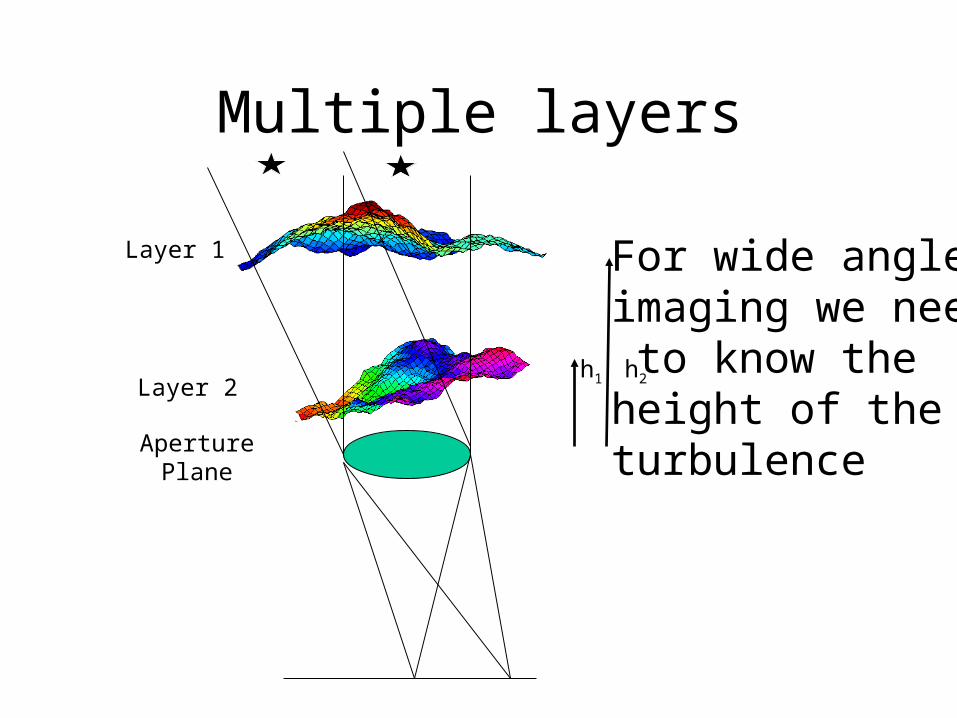
Multiple layers
Layer 1
Layer 2
AperturePlane
h1 h2
For wide angleimaging we need to know the height of the turbulence
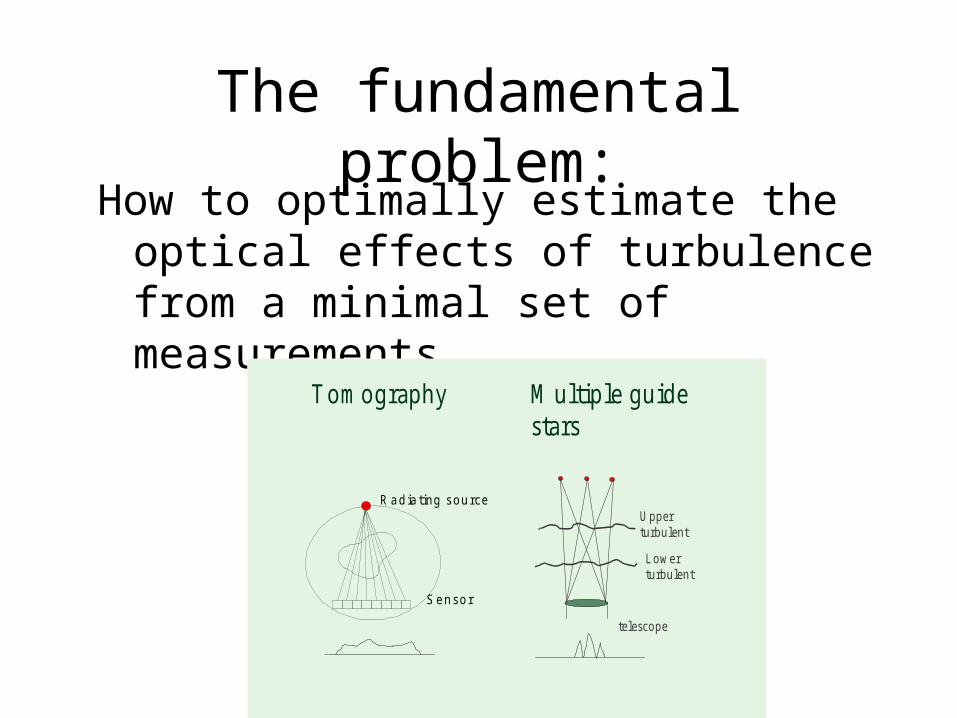
The fundamental problem:How to optimally estimate the optical effects
of turbulence from a minimal set of measurements
T o m o g ra p h y M u ltip le g u id e s ta rs
R ad ia ting source
S ensor
te le sc o p e
U p p e rtu rb u le n t
L o w e rtu rb u le n t
Limiting Factors
• Technological – CCD read noise
– Design of wavefront sensor (Curvature, Shack-Hartmann, Phase Diversity)
• Fundamental – Photon Noise
– Loss of information in measurements
– Quality of prior knowledge
In Its Raw Form the Inverse Problem Is Always Insoluble
• There are always an infinite number of ways to explain data.
• The problem is to explain the data in the most reasonable way
• Example Shack-Hartmann sensing for estimating turbulence
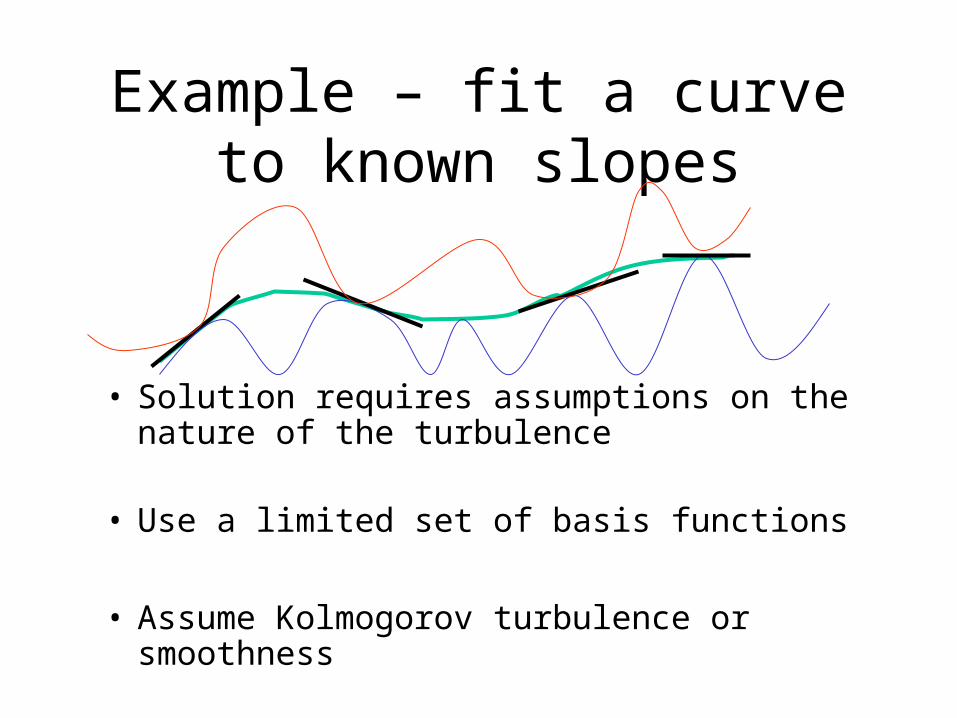
Example – fit a curve to known slopes
• Solution requires assumptions on the nature of the turbulence
• Use a limited set of basis functions
• Assume Kolmogorov turbulence or smoothness
Parameter estimation• Essentially we need to find a set of unknown
parameters which describe the object and/or turbulence
• The parameters can be in terms of pixels or coefficients of basis functions
• Solution should not be overly sensitive to our choice of parameters.
• Ideally it should be on physical grounds
Bayesian estimation 101An important problem
• Estimate
• And if you know that it models two people
splitting the bill in a restaurant?
2130 aa
21 ,aa
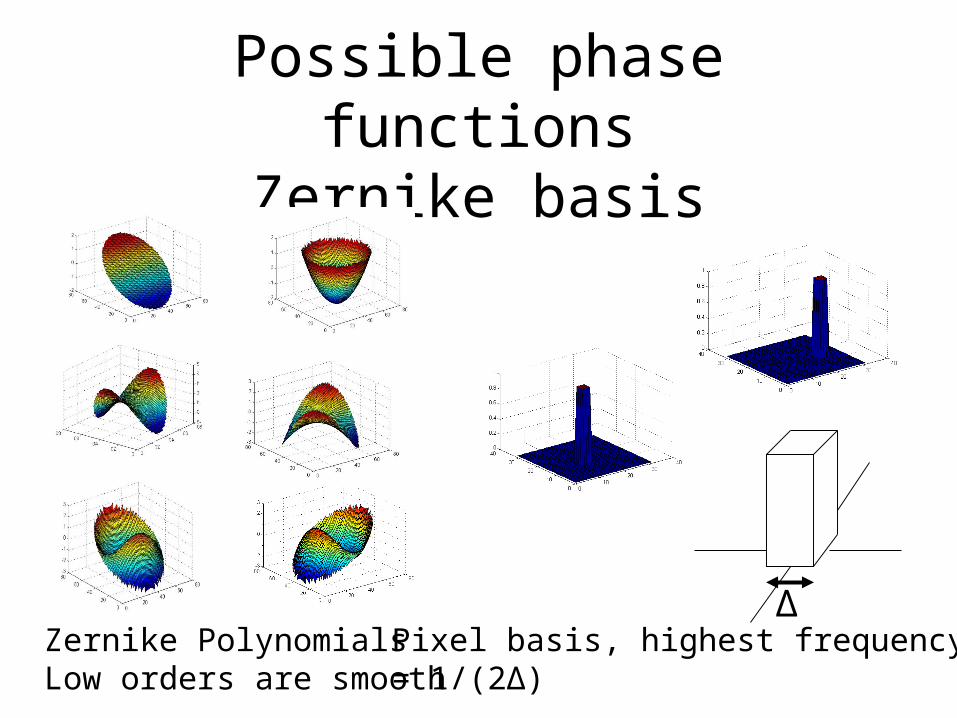
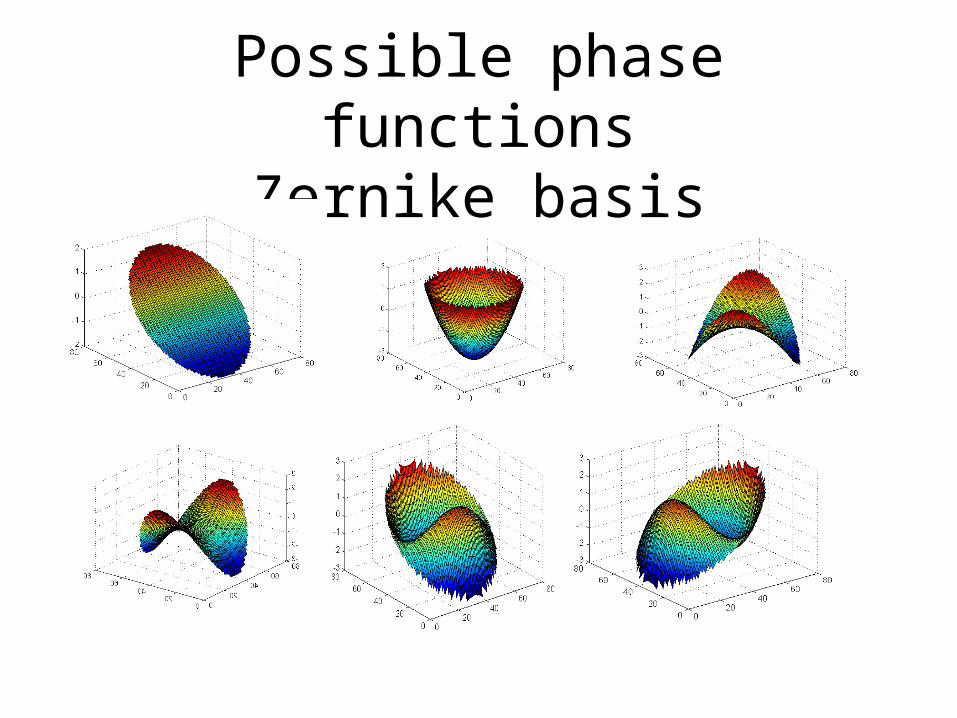
Possible phase functionsZernike basis
Zernike PolynomialsLow orders are smooth
Pixel basis, highest frequency= 1/(2Δ)
Δ
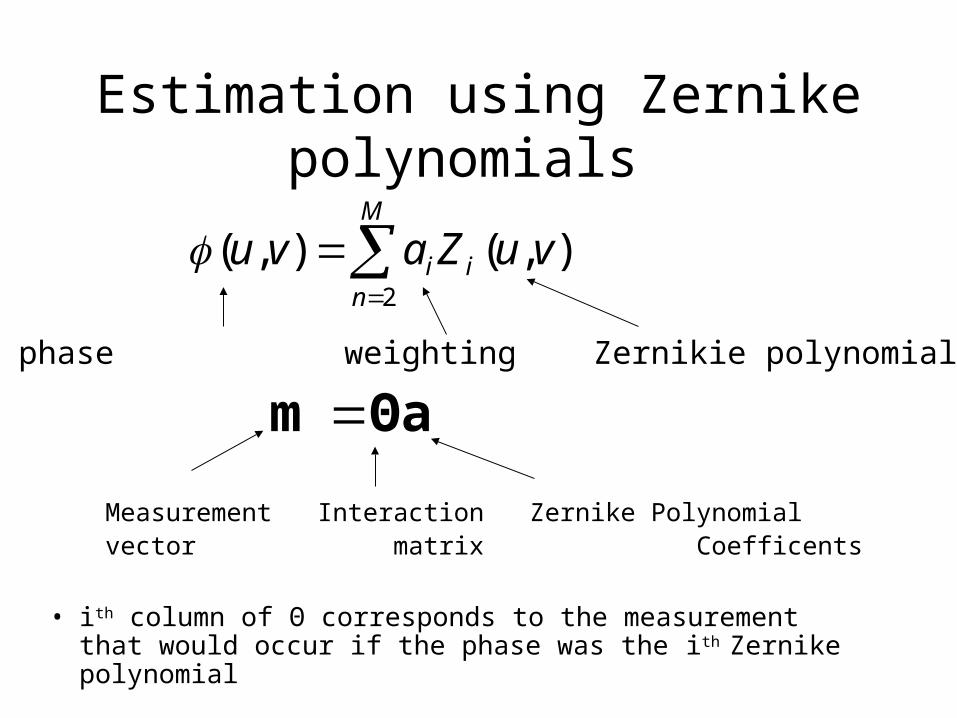
Estimation using Zernike polynomials
Measurement Interaction Zernike Polynomialvector matrix Coefficents
M
nii vuZavu
2
),(),(
Θam
• ith column of Θ corresponds to the measurement that would occur if the phase was the ith Zernike polynomial
phase weighting Zernikie polynomial
Extension to many modes• Provided the set of basis functions is complete, the answer
is independent of the choice• The best functions are approximately given by the
eigenfunctions of the covariance matrix C• These approximate the low order Zernike polynomials,
hence their use.• Conventional approach is to use a least squares solution
and estimate only the first M Zernikes when M ≈N/2 (N is
the number of measurements)
mΘΘΘa T1T ˆ
Not all measurements are equally noisy hence minimise
Ordinary least squares
• Minimise mΘamΘaE T
mΘΘΘa T1T ˆ
Weighted least squares
mΘaDmΘaE 1T
mDΘΘDΘa 1T11T ˆ
m TD
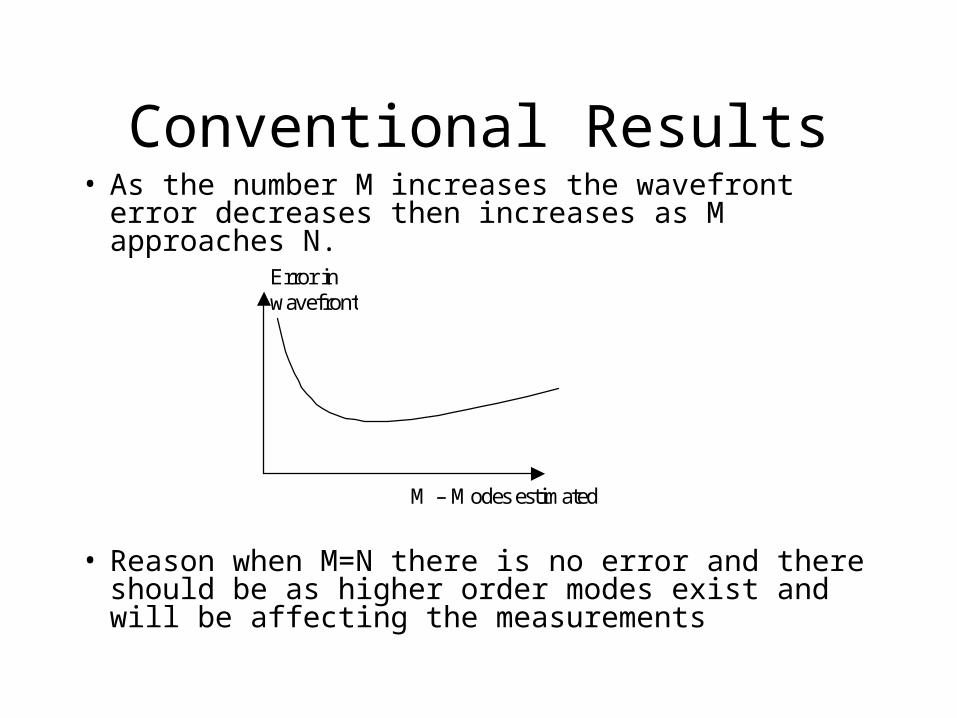
Conventional Results• As the number M increases the wavefront error
decreases then increases as M approaches N.
• Reason when M=N there is no error and there should be as higher order modes exist and will be affecting the measurements
M – Modes estimated
Error in wavefront
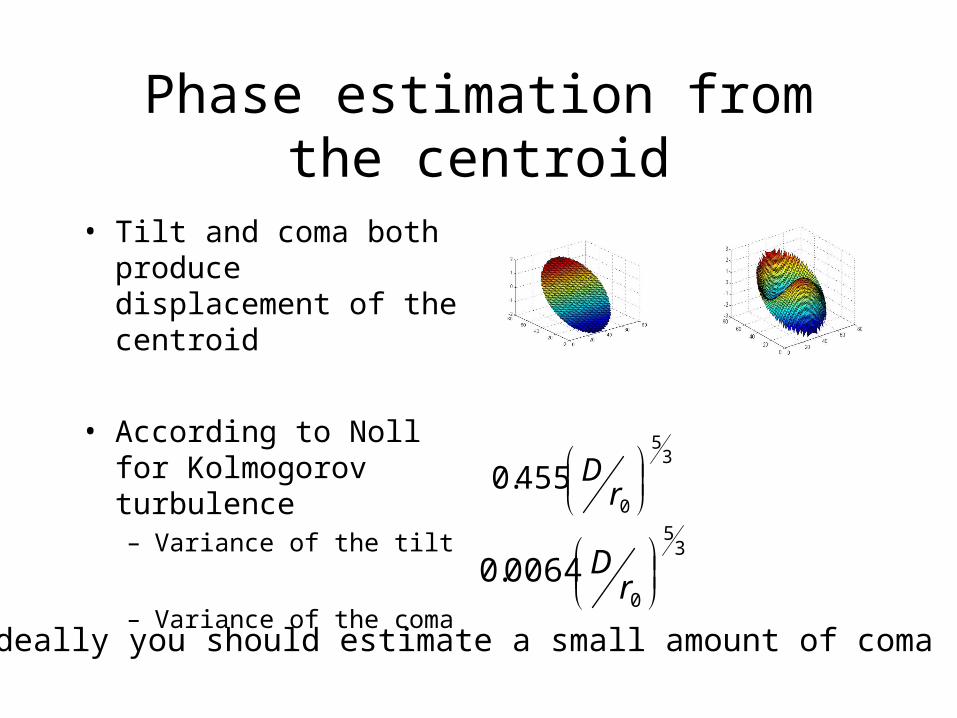
Phase estimation from the centroid
• Tilt and coma both produce displacement of the centroid
• According to Noll for Kolmogorov turbulence– Variance of the tilt
– Variance of the coma
35
0455.0
r
D
35
00064.0
r
D
Ideally you should estimate a small amount of coma
Bayesian viewpoint
• The problem in the previous slide is that we are not modelling the problem correctly
• Assuming that the higher order modes are zero, is forcing errors on the lower order modes
• Need to estimate the coefficients of all the modes as random variables
Example of Bayesian estimation for underdetermined equations
• Measurement z is a linear function of two unknowns x,y
yxz
yy
zx
ˆ
ˆ
22 ˆˆ yyxxE Statistical expectation
• We want to minimise the expected error
• The estimate (denoted by ^) is a linear function of z
Minimisation of the error 22 ˆˆ yyxxE
•Key step, rewrite in terms of andyx ˆ,ˆ x
)(ˆ yxzx
y
....
)()(
22
22
xyxx
yxyyxxE
•Solution is a function of the covariance of the unknown parameters
Vector solution for the phase
• Express the phase as a sum of orthogonal basis functions
• Observed measurements are a linear function of the coefficients
• Reconstructor depends on the covariance of a
2
),(),(n
n yxayx
Θam
mΘCΘCΘa 1T ˆ TaaC
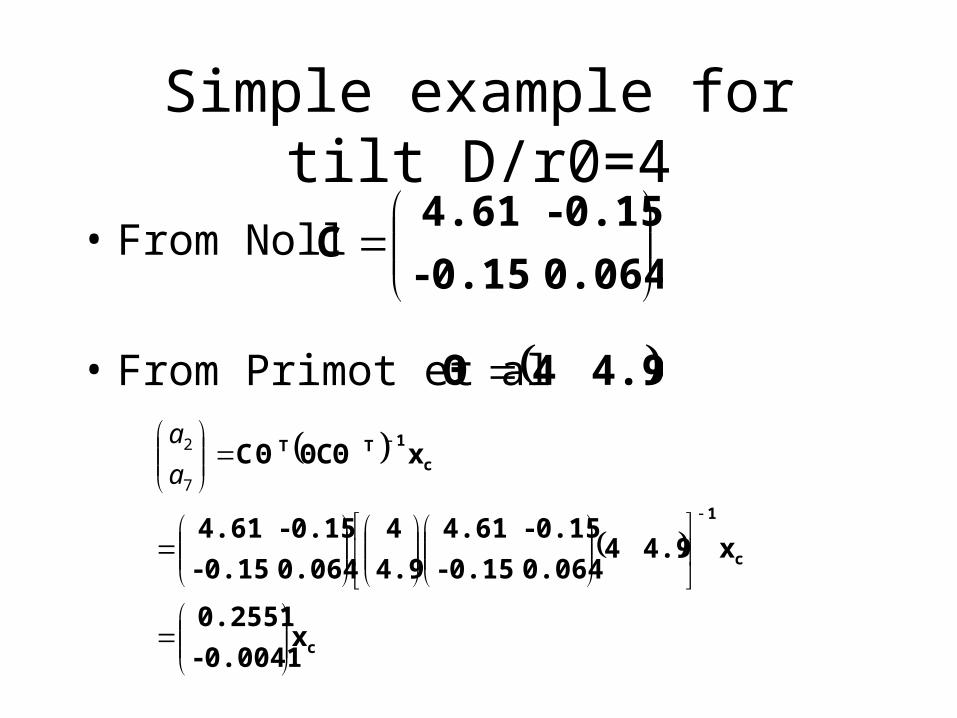
Simple example for tilt D/r0=4
• From Noll
• From Primot et al
0.0640.15-
0.15-4.61C
c
c
1
c
1TT
x0.0041-
0.2551
x4.940.0640.15-
0.15-4.61
4.9
4
0.0640.15-
0.15-4.61
xΘCΘCΘ
7
2
a
a
4.94Θ
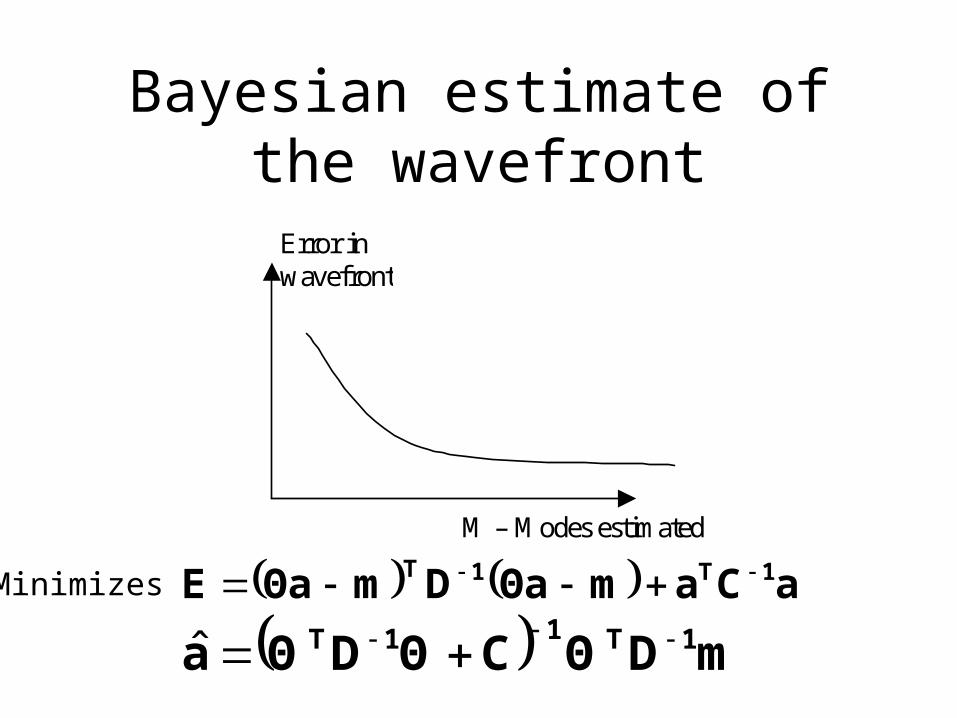
Bayesian estimate of the wavefront
M – Modes estimated
Error in wavefront
mDΘCΘDΘa 1T11T ˆ
aCamΘaDmΘaE 1T1T Minimizes
Summary Bayesian method
• When the data is noisy you need to put more emphasis on the prior.
• For example, if the data is very bad, don’t try and estimate a large number of modes
• When done properly the result does not depend strongly on C being exact
• Error predicted to be where
ΘCΘCΘCΘE TT
aaE T
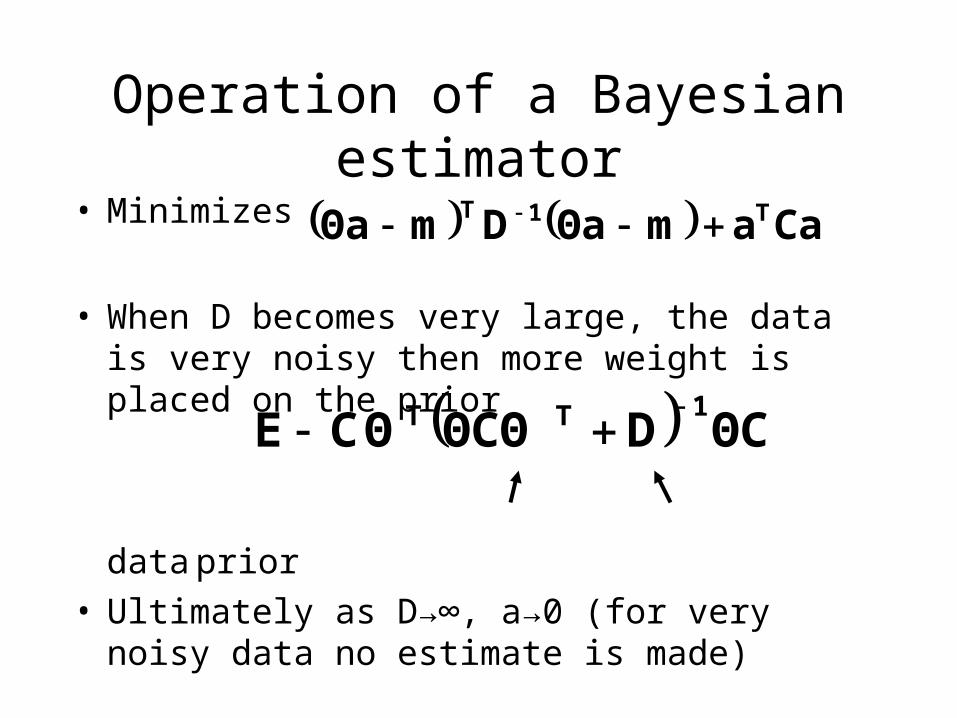
Operation of a Bayesian estimator
• Minimizes
• When D becomes very large, the data is very noisy then more weight is placed on the prior
data prior• Ultimately as D→∞, a→0 (for very noisy data no
estimate is made)
ΘCDΘCΘCΘE1TT
CaamΘaDmΘa T1T
Bayesian examination question
• You are on a game show. • You can select one of three doors• Behind one door is $10000, behind the others
nothing• After you select a door, the compere then opens
one of the other doors revealing nothing.• You are given the option to change your choice • Should you?
Estimating the performance limits when it is non-Gaussian
• The preceding analysis is fine when the measurement errors can be modelled as a Gaussian random variable
• On many equations you need to perform an analysis to work out the error in the analysis
• Cramer-Rao bounds
Cramer-Rao bound
• Linear unbiased estimators only
• Essentially the quality of the parameter estimate is given by the curvature of the pdf
• Doesn’t tell you how to achieve the bound
2
2 )),(ln(
1)(
xp
E
C
Simple example
• Find the performance limit estimating the mean of a one-dimensional Gaussian from 1 sample
2
2
2
2
)(
2)),(ln(
),(2
2
C
xxp
expx
Points to note
• Limit is a lower bound. Clearly for 1 sample from the pdf it cannot be attained
• The variance decays as 1/N with more samples
• For a Gaussian asymptotically the centroid of the distribution can be shown to approach the Cramer-Rao bound
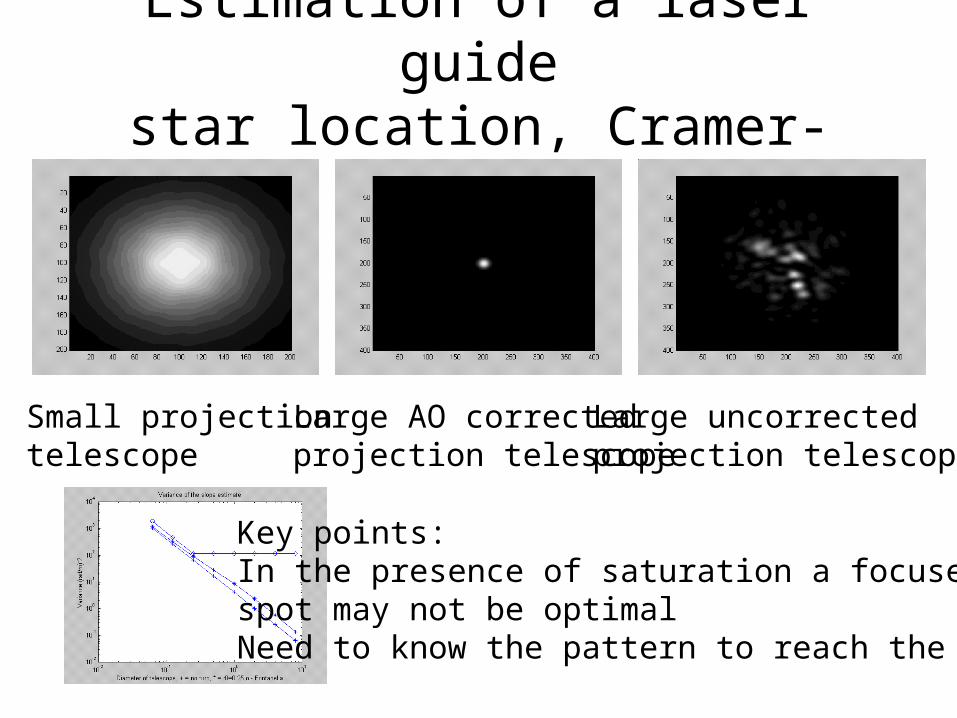
Estimation of a laser guidestar location, Cramer-Rao bound
Small projectiontelescope
Large AO corrected projection telescope
Large uncorrected projection telescope
Key points:In the presence of saturation a focused spot may not be optimalNeed to know the pattern to reach the limit
Optimal estimation of a parameterwavefront tilt
• Important because the wavefront tilt is the dominant form of phase aberration
• A small error in estimating the tilt can be larger than the full variance of a higher order aberration.
Issues
• Displacement of the centroid of an image is proportional to the average tilt (not the least mean square) of the phase distortion
• Will discuss this issue later, but for the moment concentrate on estimating the mean square tilt.
How do you estimate the centre of a spot?
• The performance of the Shack-Hartmann sensor depends on how well the displacement of the spot is estimated.
• The displacement is usually estimated using the centroid (center-of-mass) estimator.
• This is the optimal estimator for the case where the spot is Gaussian distributed and the noise is Poisson.
dxxfxxc )(ˆ
Centroid estimation for a sinc2 function
0
d)(
)(sin)(
2
2
uxx
xxxxPSFE
c
c
uxx
xxxxxPSFVar
c
cc d
)(
)(sin)()(
2
22
Why Not Use the Centroid?
• In practice the spot intensity decays as
• This means that photons can still occur at points quite distant from the centre.
• Estimator is divergent unless restricted to a finite region in the image plane
2
1
x
dydxxfxxc )(
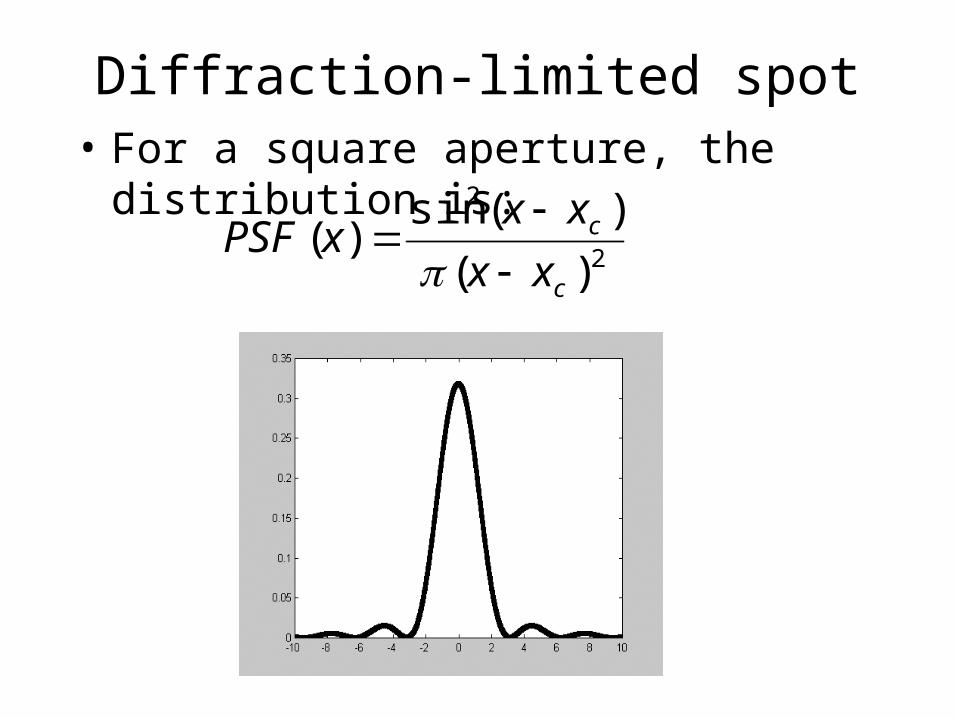
Diffraction-limited spot• For a square aperture, the distribution is:
2
2
)(
)(sin)(
c
c
xx
xxxPSF
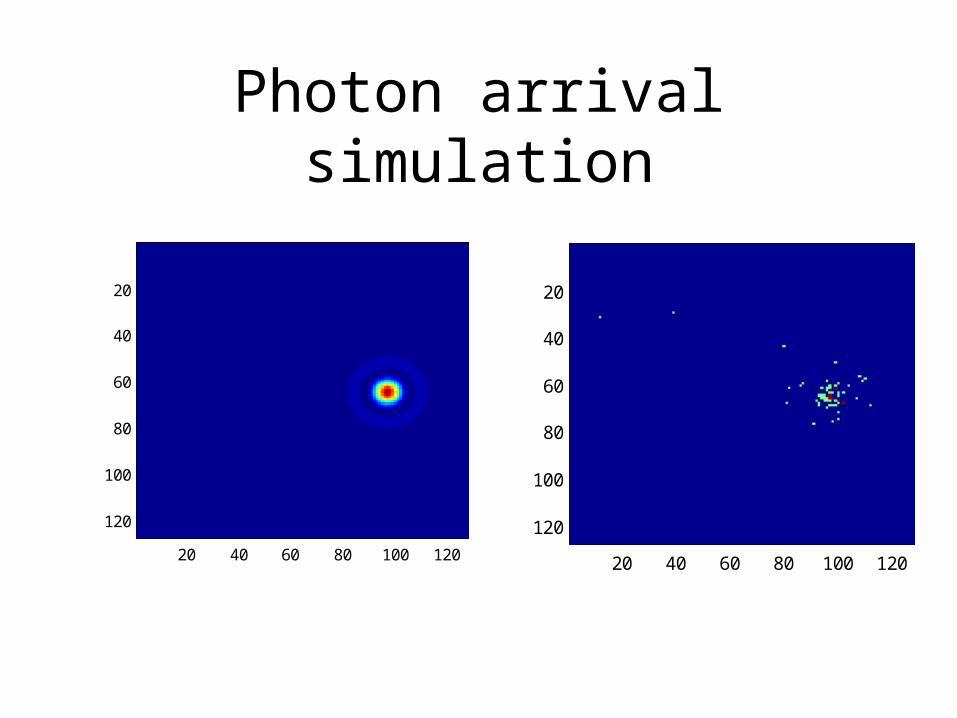
Photon arrival simulation
20 40 60 80 100 120
20
40
60
80
100
120
20 40 60 80 100 120
20
40
60
80
100
120
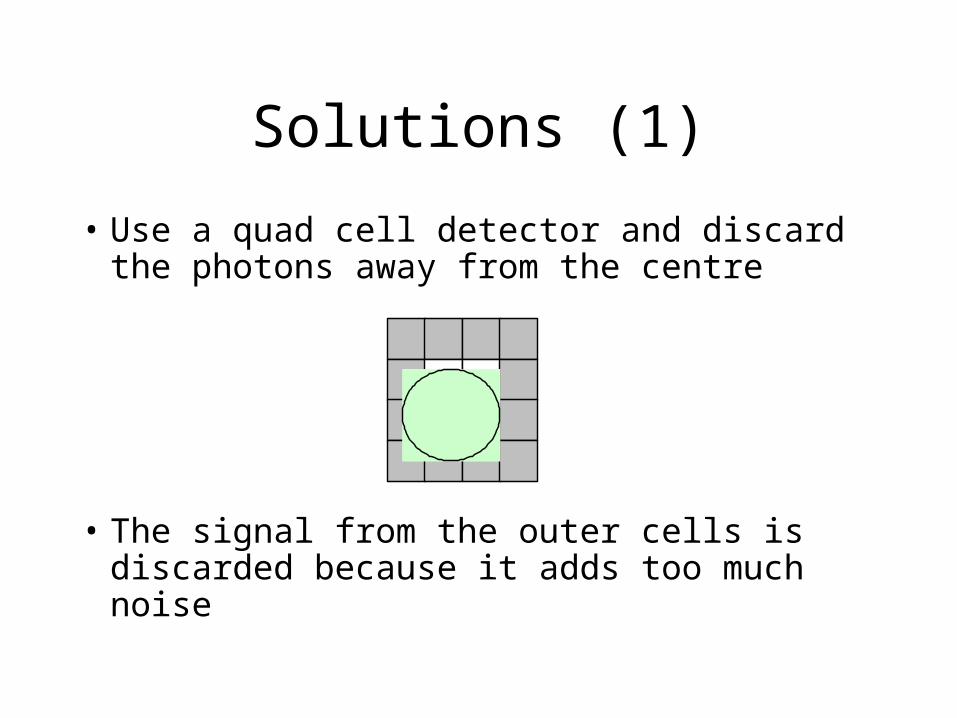
Solutions (1)
• Use a quad cell detector and discard the photons away from the centre
• The signal from the outer cells is discarded because it adds too much noise
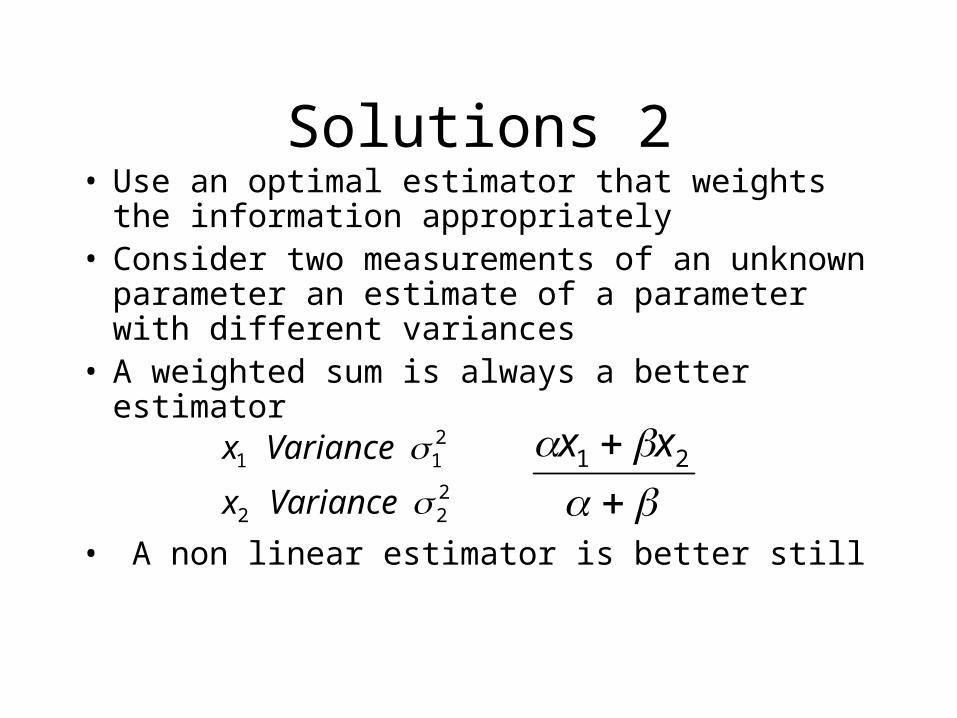
Solutions 2• Use an optimal estimator that weights the
information appropriately• Consider two measurements of an unknown
parameter an estimate of a parameter with different variances
• A weighted sum is always a better estimator
• A non linear estimator is better still
222
211
Variancex
Variancex
21 xx
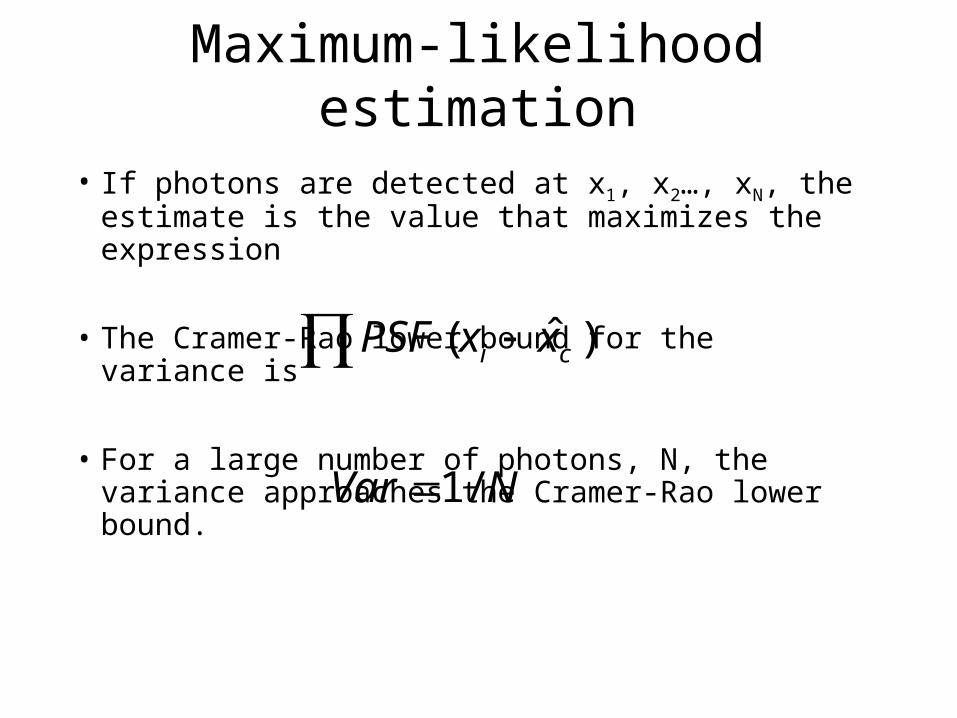
Maximum-likelihood estimation
• If photons are detected at x1, x2…, xN, the estimate is the value that maximizes the expression
• The Cramer-Rao lower bound for the variance is
• For a large number of photons, N, the variance approaches the Cramer-Rao lower bound.
)ˆ( ci xxPSF
NVar /1
• Technique relies on finding a model of the object
• Not sensitive to the size of window (unlike the centroid)
• Centroid is a closed form solution for fitting a Gaussian of variable width
Centroid location by model fitting
Model Data
dxxfx )(.
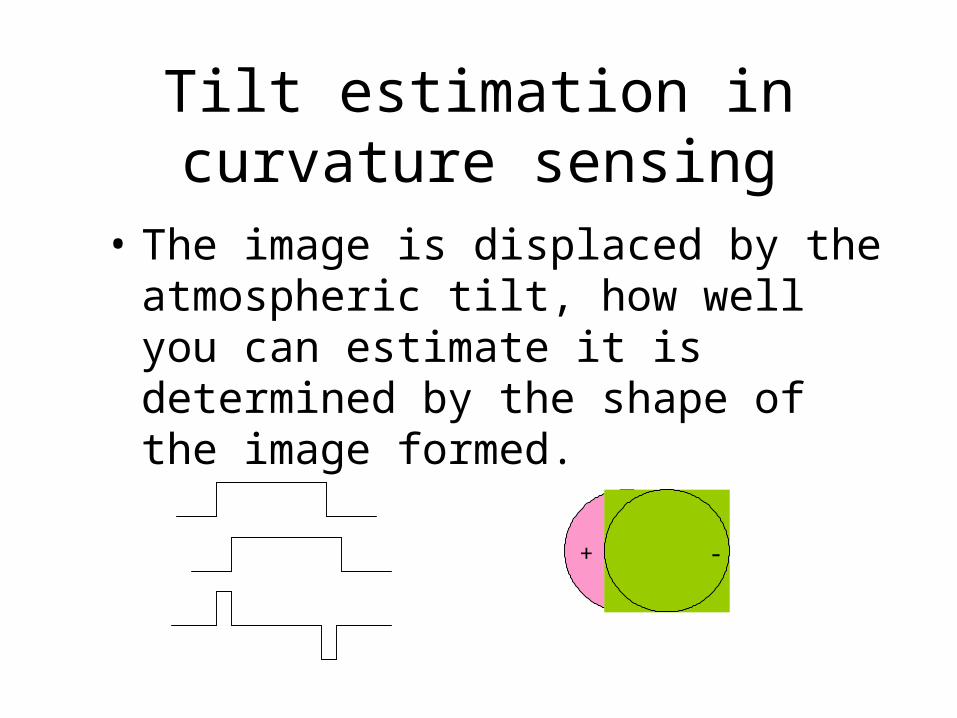
Tilt estimation in curvature sensing
• The image is displaced by the atmospheric tilt, how well you can estimate it is determined by the shape of the image formed.
+ -
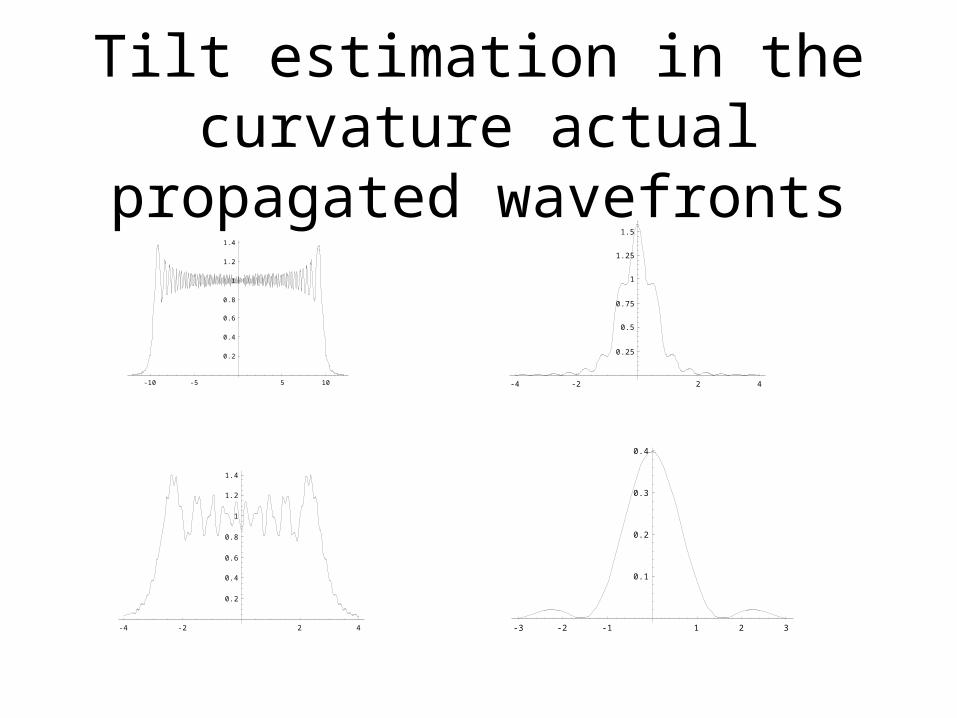
Tilt estimation in the curvature actual propagated wavefronts
-10 -5 5 10
0.2
0.4
0.6
0.8
1
1.2
1.4
-4 -2 2 4
0.2
0.4
0.6
0.8
1
1.2
1.4
-4 -2 2 4
0.25
0.5
0.75
1
1.25
1.5
-3 -2 -1 1 2 3
0.1
0.2
0.3
0.4
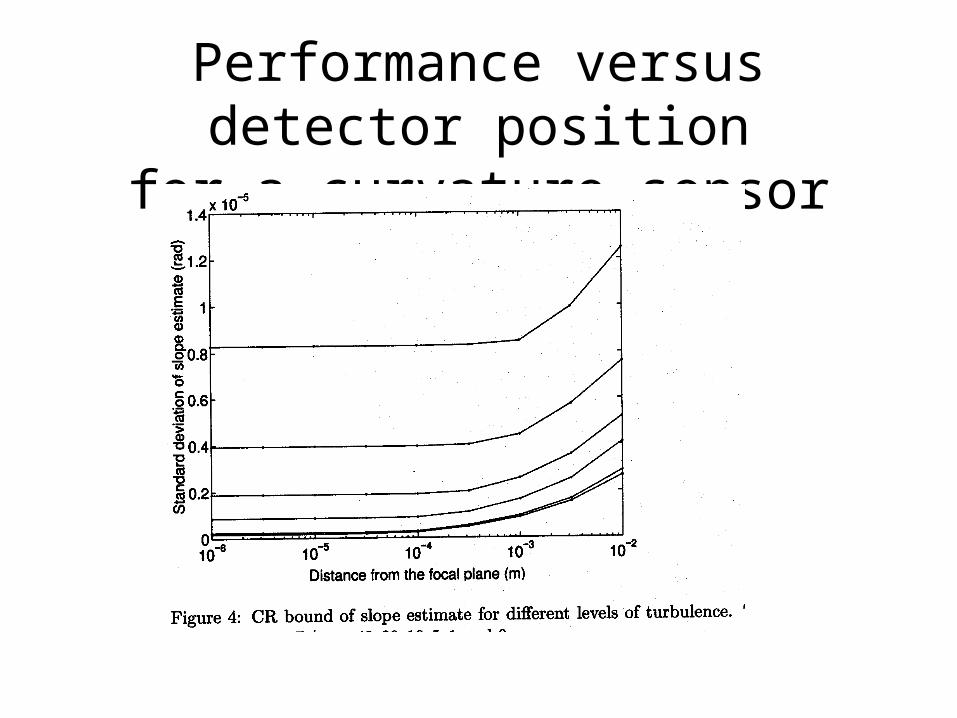
Performance versus detector positionfor a curvature sensor
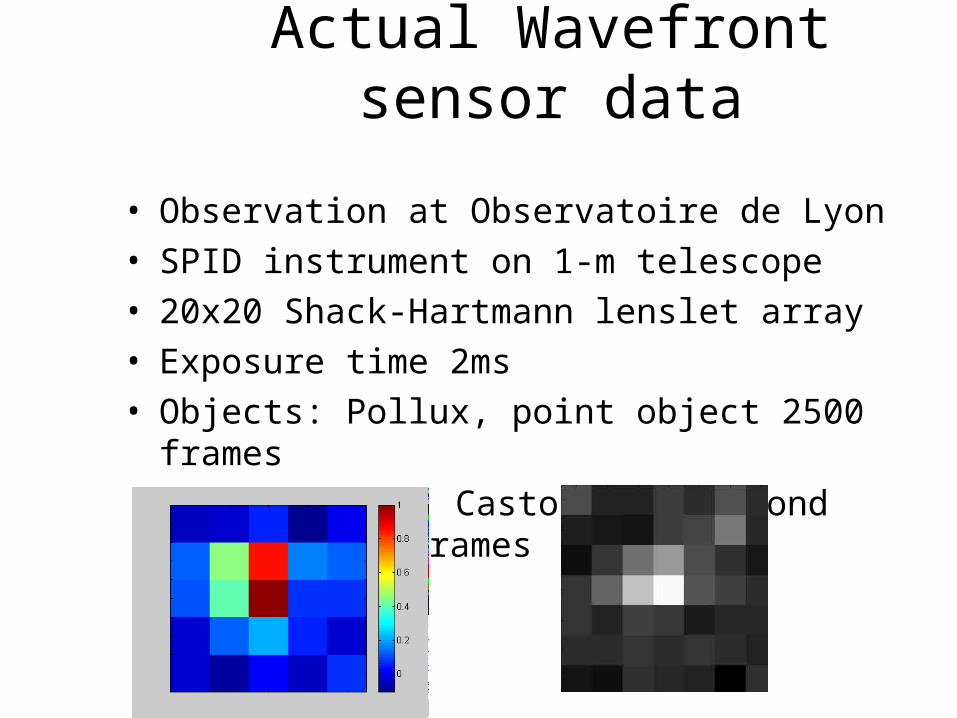
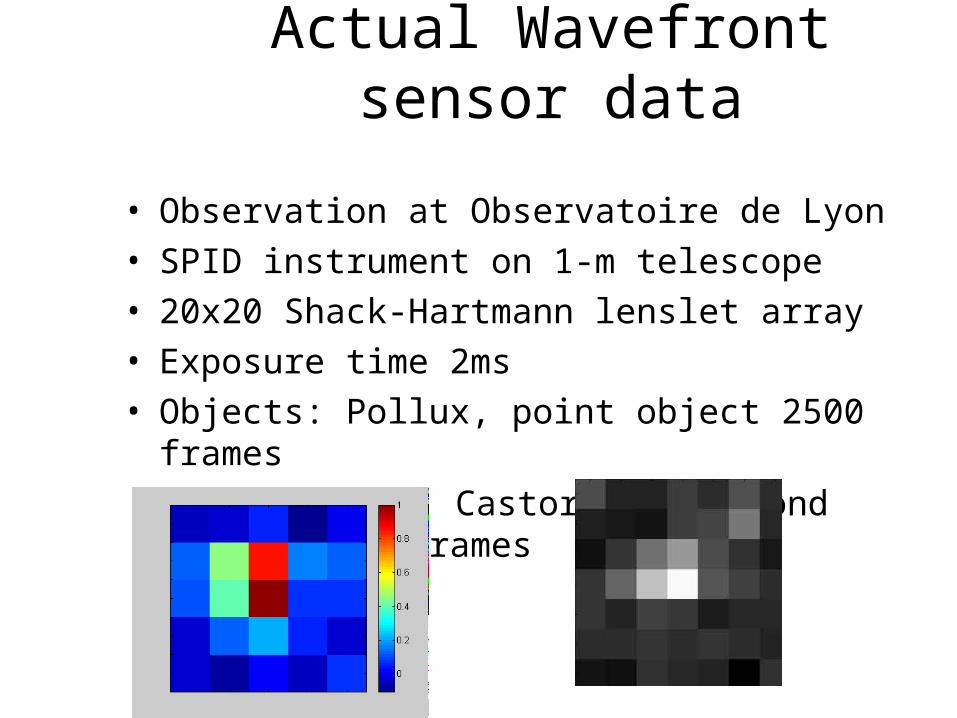
Actual Wavefront sensor data
• Observation at Observatoire de Lyon
• SPID instrument on 1-m telescope
• 20x20 Shack-Hartmann lenslet array
• Exposure time 2ms
• Objects: Pollux, point object 2500 frames
Castor3 arc second binary 2500 frames
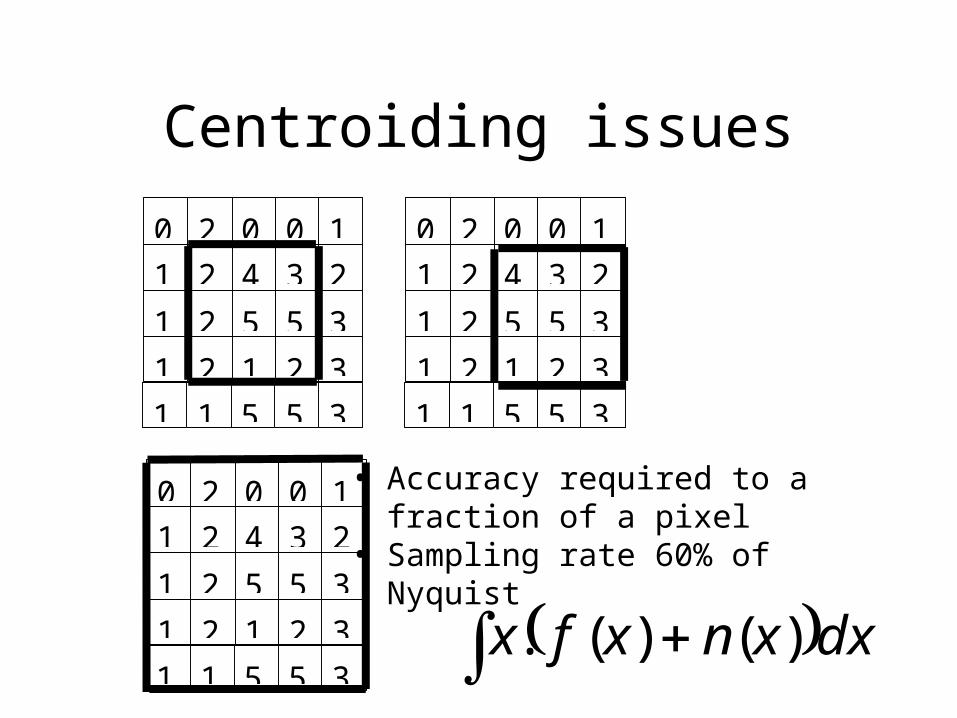
Centroiding issues
5 3 5 2 1
2 3 1 2 1
3 2 4 2 1
0 1 0 2 0
5 3 5 1 1
5 3 5 2 1
2 3 1 2 1
3 2 4 2 1
0 1 0 2 0
5 3 5 1 1
5 3 5 2 1
2 3 1 2 1
3 2 4 2 1
0 1 0 2 0
5 3 5 1 1
• Accuracy required to a fraction of a pixel
• Sampling rate 60% of Nyquist
dxxnxfx )()(.
• Need a good model of the object
• In each lenslet of the Shack-Hartmann acts like a small telescope the dominant effect is one of tilt.
=> We have a large number of images of the same object shifted before they are sampled.
Finding the model
Solution: approach
• Use blind deconvolution to find model• MAP framework (Hardie et al, FLIR)• Data-capturing process:
• Choose initially so that
• Prior information:– Laplacian smoothness for the optics
– Maximum entropy for CCD
noise CCD} optics fsubsample{ data
δ f noise CCD} opticssubsample{ data
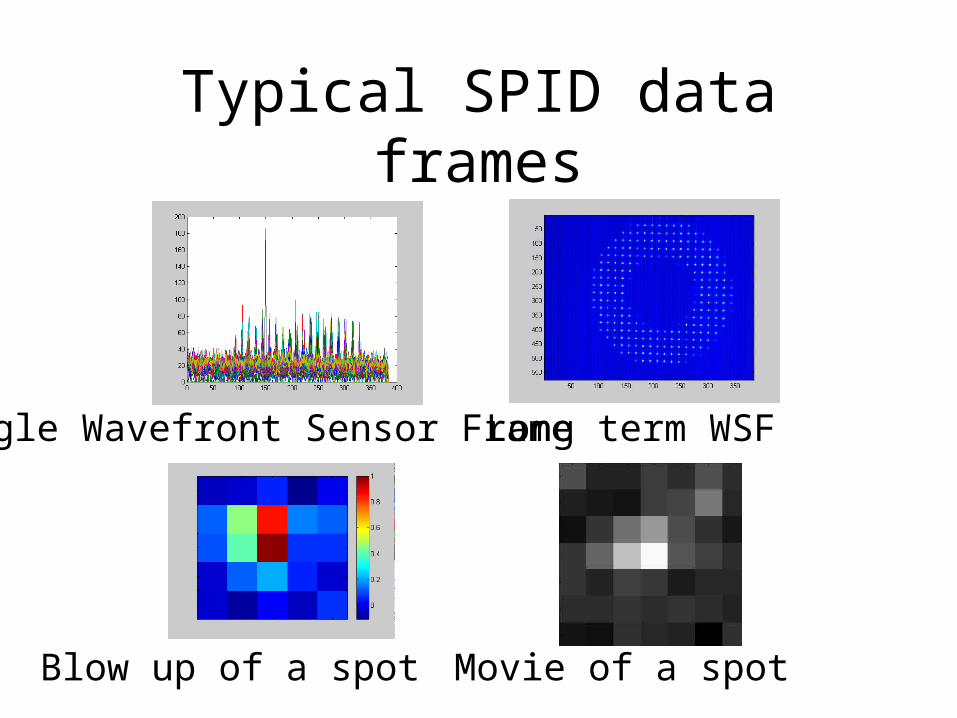
Typical SPID data frames
Single Wavefront Sensor Frame Long term WSF
Blow up of a spot Movie of a spot
Simulations
• Inputs:– Object f = point source– Optics = diffraction-limited pattern of square
aperture– CCD structure: Gaussian-like– Random displacements– White Gaussian noise: dB, 30dB, 15dB
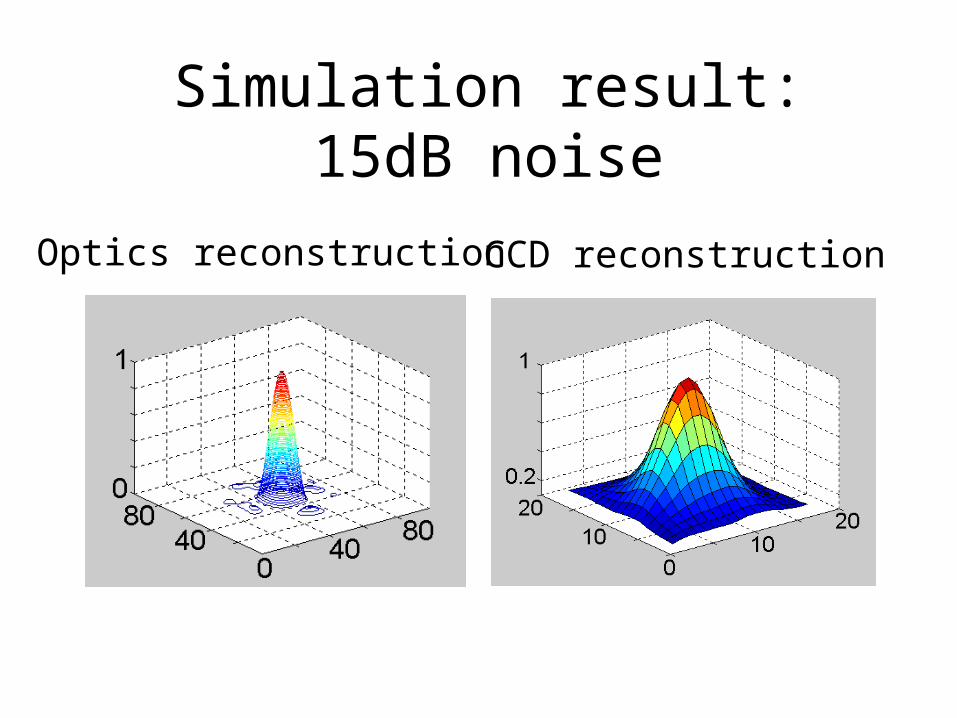
Simulation result: 15dB noise
Optics reconstruction CCD reconstruction
Traditional centroiding
• Centre of gravity of spot image• Problems:
– Finite pixel size– Finite window size– Readout noise (more pixels = more noise)– Bias
• Problems become worse with extended objects
Model-fitting
• Full blind deconvolution computationally unreasonable
• Fit a model estimated by blind deconvolution
• Use model to determine centroids
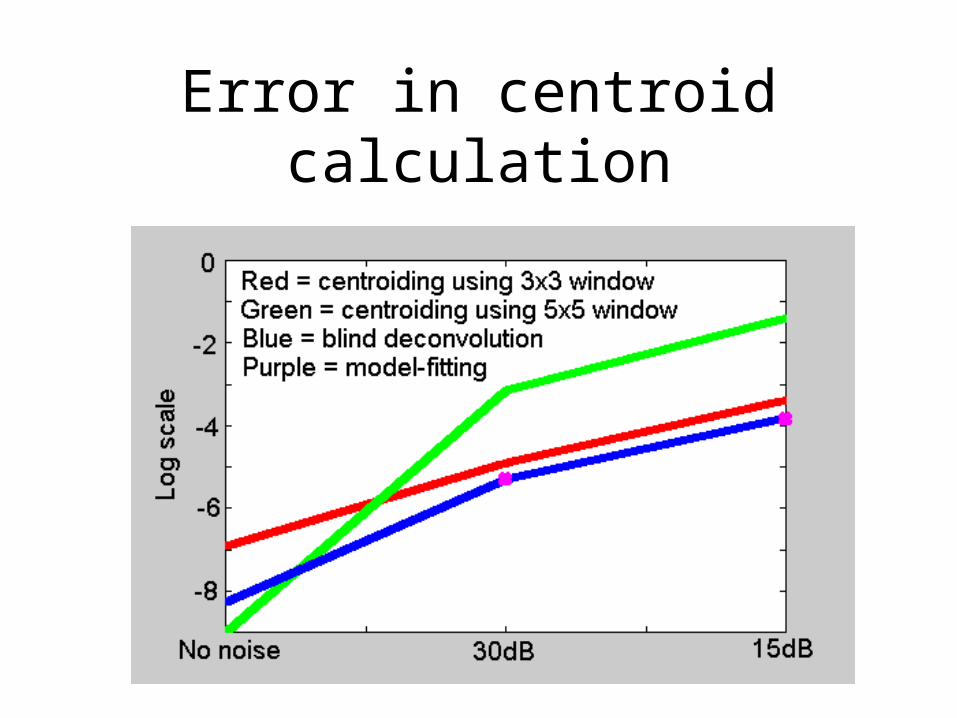
Error in centroid calculation
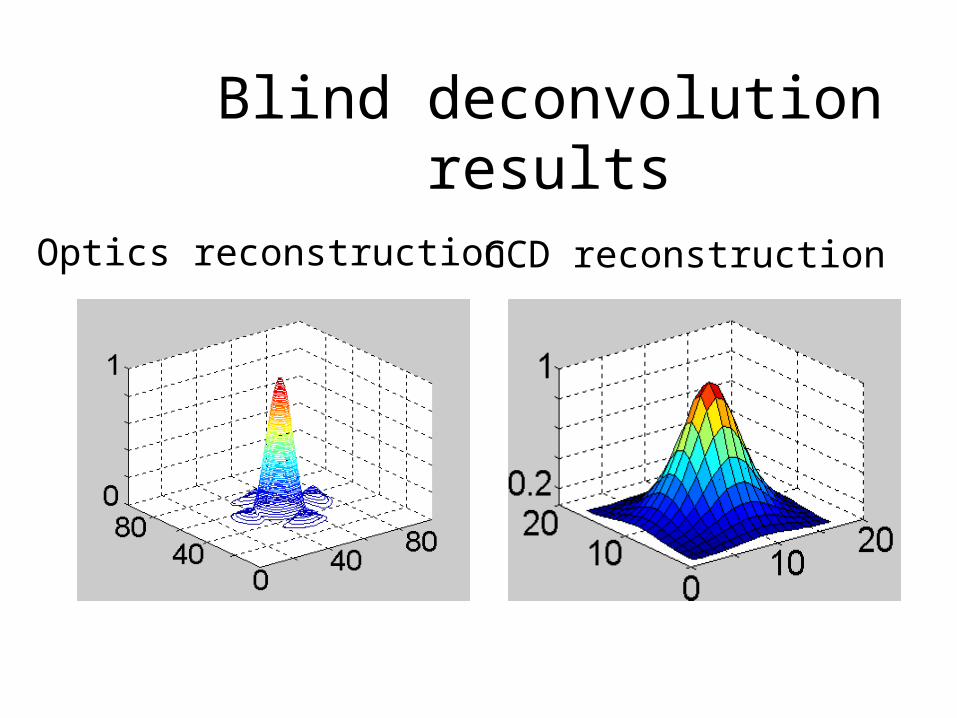
Blind deconvolution results
Optics reconstruction CCD reconstruction
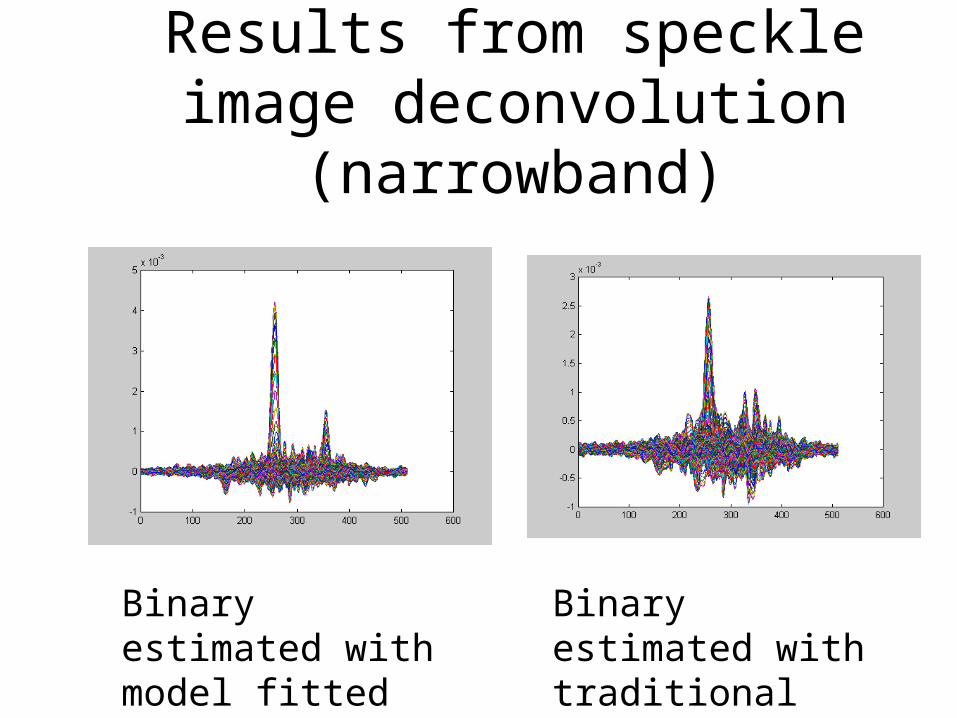
Results from speckle image deconvolution (narrowband)
Binary estimated with model fitted centroids
Binary estimated with traditionalcentroids
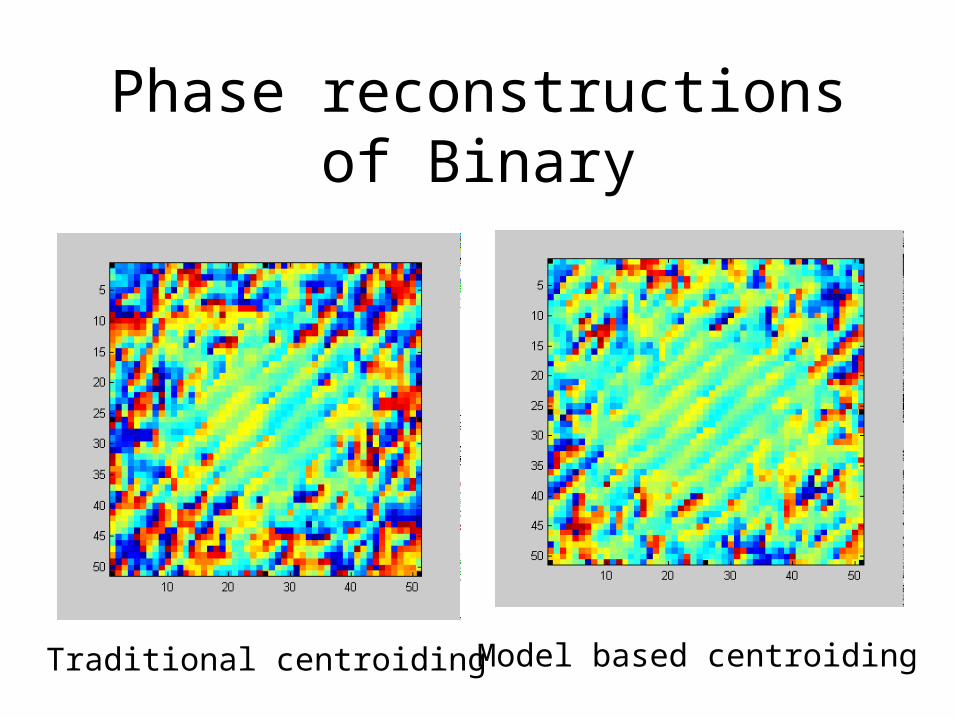
Phase reconstructions of Binary
Traditional centroiding Model based centroiding
Conclusions
• Bayesian approaches provide a logical framework for filling in missing data
• Make sure of what you are assuming
• Cramer-Rao bound can provide a performance limit
• You need to look at the whole process when deriving an algorithm
And the answer is:(ref Stark and Woods)
• Yes change the door
? ??
Actual Wavefront sensor data
• Observation at Observatoire de Lyon
• SPID instrument on 1-m telescope
• 20x20 Shack-Hartmann lenslet array
• Exposure time 2ms
• Objects: Pollux, point object 2500 frames
Castor3 arc second binary 2500 frames
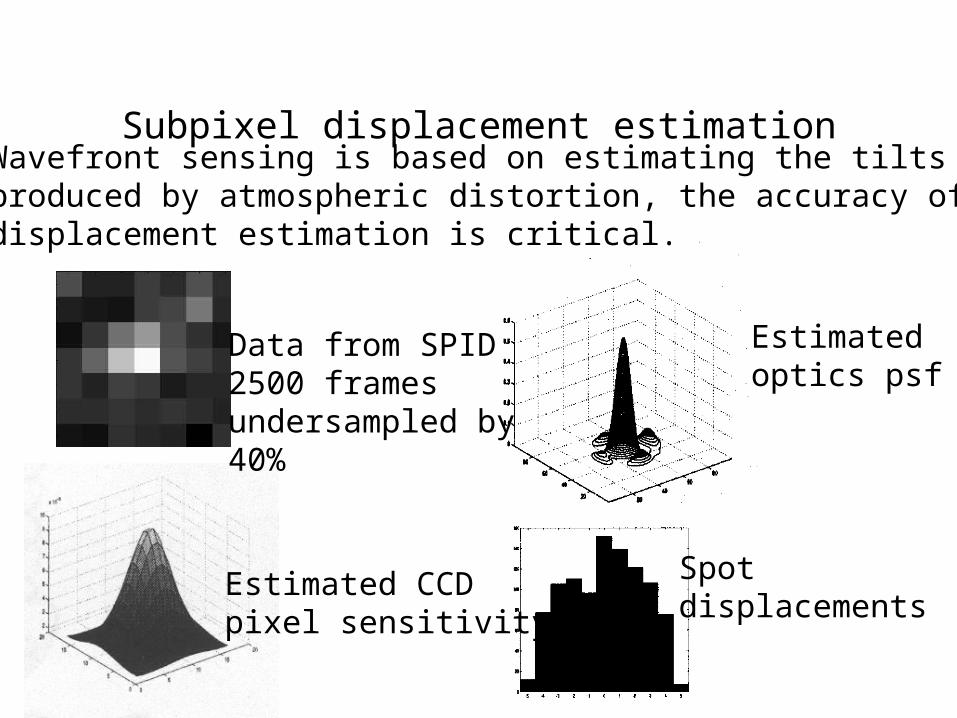
Subpixel displacement estimationWavefront sensing is based on estimating the tilts produced by atmospheric distortion, the accuracy ofdisplacement estimation is critical.
Data from SPID2500 framesundersampled by40%
Estimated CCD pixel sensitivity
Estimatedoptics psf
Spot displacements
Explanation of the terms
• Results from
Possible phase functionsZernike basis
The inverse problem
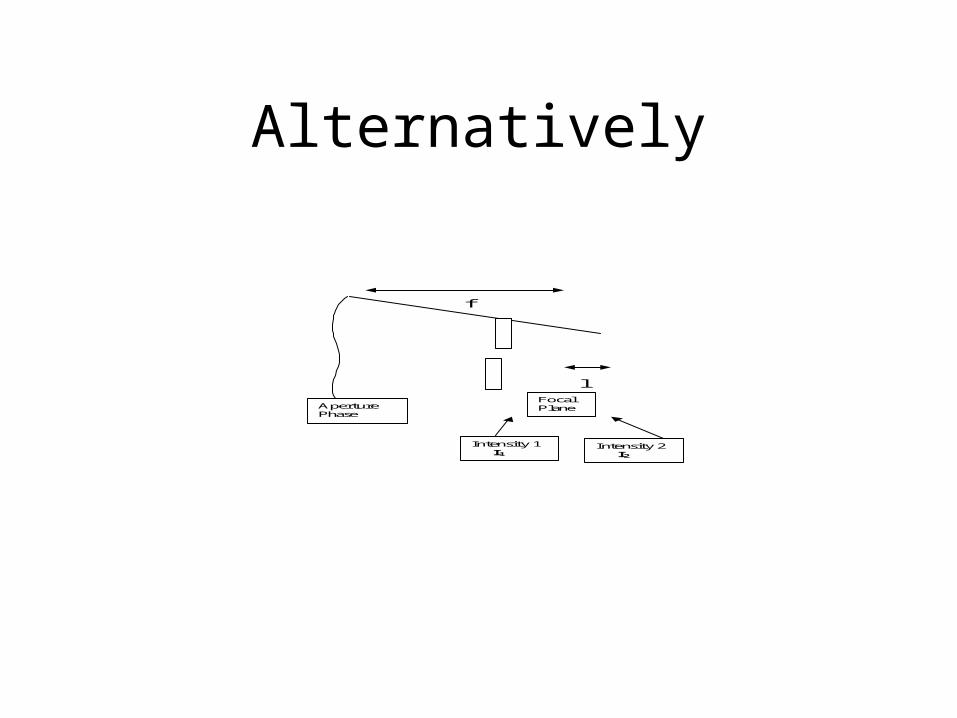
Alternatively
Focal Plane Aperture
Phase
Intensity 1 I1
Intensity 2 I2
l
f
Prior information
• Infinite number of unknowns, but a finite number of centroid measurements from the sensor
• Conventional approach is to choose the basis functions and estimate M coefficients, where M < N the number of measurements
1
),(),(n
ii vuavu
mDa TTN
11
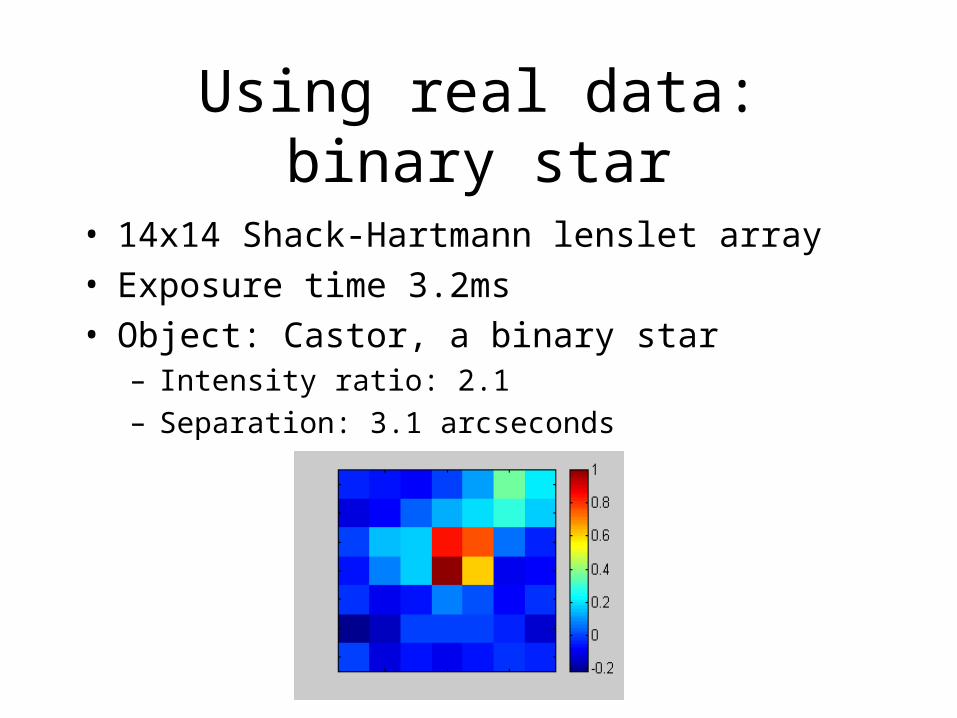
Using real data: binary star
• 14x14 Shack-Hartmann lenslet array
• Exposure time 3.2ms
• Object: Castor, a binary star– Intensity ratio: 2.1
– Separation: 3.1 arcseconds
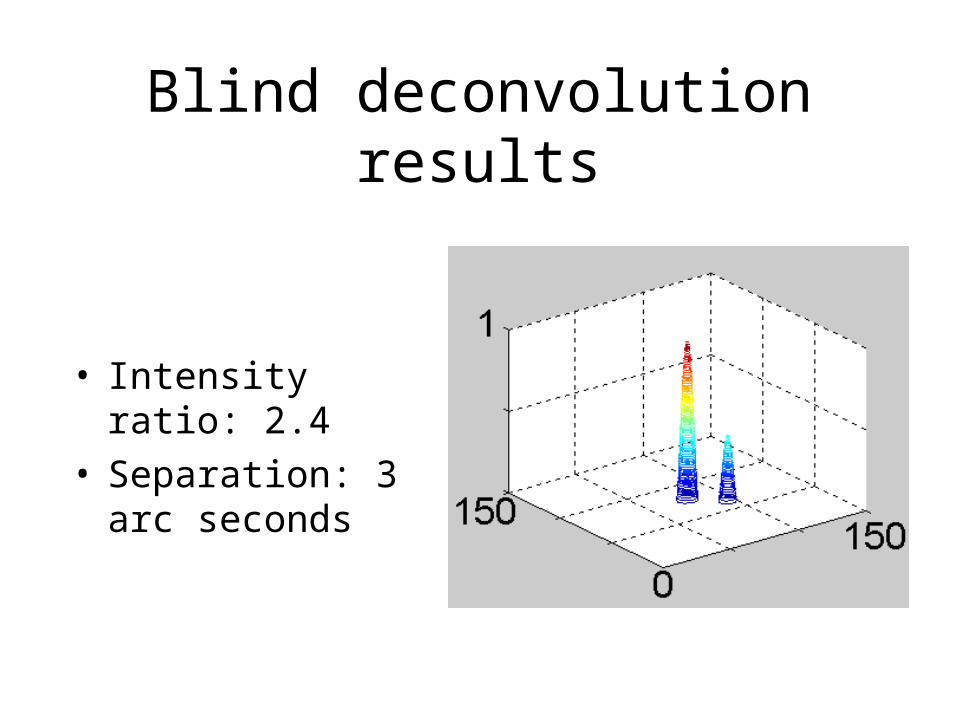
Blind deconvolution results
• Intensity ratio: 2.4• Separation: 3 arc
seconds