Embed Size (px)
Citation preview

INTERNATIONAL JOURNAL OF c© 2009 Institute for ScientificNUMERICAL ANALYSIS AND MODELING Computing and InformationVolume 6, Number 1, Pages 33–49
NUMERICAL ANALYSIS FOR A NONLOCAL ALLEN-CAHNEQUATION
PETER W. BATES, SARAH BROWN, AND JIANLONG HAN
(Communicated by Gang Bao)
Abstract. We propose a stable, convergent finite difference scheme to solve
numerically a nonlocal Allen-Cahn equation which may model a variety of
physical and biological phenomena involving long-range spatial interaction. We
also prove that the scheme is uniquely solvable and the numerical solution will
approach the true solution in the L∞ norm.
Key Words. Finite difference scheme; Long range interaction.
1. Introduction
Consider the following problem
ut =∫
Ω
J(x− y)u(y)dy −∫
Ω
J(x− y)dy u(x)− f(u)(1)
in (0, T )× Ω, with initial condition
u(0, x) = u0(x),(2)
where T > 0 and Ω ⊂ Rn is a bounded domain. The unknown u is a real-valuedorder parameter, the interaction kernel satisfies J(−x) = J(x), and f is bistable.
The equation (1) can be derived as an L2 gradient flow for the free energy
(3) E =14
∫ ∫J(x− y) (u(x)− u(y))2dx dy +
∫F (u(x)) dx,
where F is a double well function.The L2 gradient flow for the classical Ginzberg-Landau energy functional
(4) E =12
∫|∇u|2dx +
∫F (u(x)) dx,
is the Allen-Cahn equation:
ut = 4u(x)− f(u)(5)
As mentioned in [3], the equations (1) and (5) are important for modelling a va-riety of physical and biological phenomena involving media with properties varyingin space. There is by now a lot of work on equation (1) and (5) (see for example[1], [2], [5], [7], [8], [9], [11], [12], [13], [15], [16], [17], and the references therein).
To the best of our knowledge, there are very few results on the numerical solutionsto (1). In this paper, we develop a finite difference scheme for equation (1) for n = 1and n = 2. We also prove that the difference scheme is stable and that the numerical
Received by the editors May 1, 2007 and, in revised form, December 13, 2007.2000 Mathematics Subject Classification. 35K57, 34A34, 65L12, 65N06.
33

34 P. W. BATES, S. BROWN, AND J. HAN
approximation converges to the solution of (1) as the spatial and temporal meshsize approaches zero. Our numerical results coincide with the theoretical results in[12].
2. Analysis of the proposed scheme
In this section, we consider finite difference approximations of equation (1) forn = 1 and n = 2. For the sake of exposition, we take f(u) = u3 − u, but theanalysis applies to the general smooth bistable function if care is taken in thechoice of linearization.
We use the following notation:For n = 1 with Ω = (−L,L),
Ωx = xi|xi = −L + i4x, 0 ≤ i ≤ M,Ωt = tk| tk = k4t, 0 ≤ k ≤ K,
where 4x = 2L/M and 4t = T/K. Our difference scheme for equation (1) forn = 1 is as follows:
u0i = u0(xi), for 0 ≤ i ≤ M,(6)
δtuki = (J ∗ uk)i − (J ∗ 1)iu
ki + ψ(uk
i , uk+1i ) for 0 ≤ i ≤ M, 0 ≤ k ≤ K − 1,(7)
where
δtuki =
uk+1i − uk
i
4t,
(J ∗ uk)i =4x
[12J(x0 − xi)uk
0 +M−1∑m=1
J(xm − xi)ukm +
12J(xM − xi)uk
M
],
and
ψ(uki , uk+1
i ) = uki − (uk
i )2uk+1
i .
For a rectangular domain (−L,L)× (−W,W ) ⊂ R2, we have
Ωx, y = (xi, yj)|xi = −L + i4x, yj = −W + j4y, 0 ≤ i ≤ M, 0 ≤ j ≤ N,Ωt = tk| tk = k4t, 0 ≤ t ≤ K,
where 4x = 2L/M and 4y = 2W/N.Our difference scheme in this case is
u0i, j = u0(xi, yj) for 0 ≤ i ≤ M, 0 ≤ j ≤ N,(8)
δtuki, j = (J ∗ uk)i, j − (J ∗ 1)i, ju
ki, j + ψ(uk
i, j , uk+1i, j )(9)
for 0 ≤ i ≤ M, 0 ≤ j ≤ N, 0 ≤ k ≤ K − 1,
where
δtuki, j =
uk+1i, j − uk
i, j
4t,

NONLOCAL ALLEN-CAHN EQUATION 35
(J ∗ uk)i, j =4x4y
[M−1∑m=1
N−1∑n=1
J(xm − xi, yn − yj)ukm, n
+12
M−1∑m=1
(J(xm − xi, y0 − yj)uk
m, 0 + J(xm − xi, yN − yj)ukm, N
)
+12
N−1∑n=1
(J(x0 − xi, yn − yj)uk
0, n + J(xM − xi, yn − yj)ukM, n
)
+14
(J(x0 − xi, y0 − yj)uk
0, 0 + J(xM − xi, y0 − yj)ukM, 0
+J(x0 − xi, yN − yj)uk0, N + J(xM − xi, yN − yj)uk
M, N
)],
and
ψ(uki, j , u
k+1i, j ) = uk
i, j − (uki, j)
2uk+1
i, j .
Remark 2.1. The choice of ψ(uki, j , u
k+1i, j ) implies that our method is semi-implicit,
which gives us better stability properties.
Theorem 2.2. If u(0, x, y) ∈ C(Ω) and J ∈ C ([−2L, 2L]× [−2W, 2W ]), then thereexists a unique solution to the difference equations (8)-(9), and we have
(10) maxi, j
|uki, j | ≤ C
for some constant C which is independent of k, i.e., the scheme is stable under themaximum norm.
Proof. From equations (8)-(9) and the form of ψ, it is clear that the scheme isuniquely solvable.
Set Λ = max |u0(x, y)|.For k = 0,
maxi,j
|u0i, j | = max |u0(x, y)| = Λ(11)
For 0 ≤ k ≤ K, denote ak = max |uki, j |. Equation (9) implies
ak+1 ≤ ak + (2C1 + 1)4t ak(12)
where C1 = max |(J ∗ 1)i, j |. From equation (12), we have
ak+1 ≤ (1 + (2C1 + 1)4t)ak ≤ (1 + (2C1 + 1)4t)2ak−1
...
≤ (1 + (2C1 + 1)4t)ka0 ≤ e(2C1+1)4tka0
≤ e(2C1+1)2T a0 ≤ C(T )Λ.
(13)
Therefore,
maxi, j, k
|uki, j | ≤ C(T )Λ,(14)
where C(T ) is independent of k and of the spatial mesh size. This completes theproof.
¤

36 P. W. BATES, S. BROWN, AND J. HAN
Remark 2.3. A similar result holds for all values of n.
Next we consider error estimates for the proposed scheme. In order to showthat the numerical solution converges to the solution of (1), we have the followinglemma.
Lemma 2.4. Suppose that J and f satisfy the following assumptions:(A1) J ∈ W 2,1(Rn) and (L1 ≡ maxsup
∫Ω|J(x− y)|dy, sup
∫Ω|J ′(x− y)|dx,
sup∫Ω|J ′′(x− y)|dy < ∞.
(A2) f ∈ C2(Rn) and there exist c1, c2, c3, c4 > 0 and r > 2 such thatf(u)u ≥ c1|u|r − c2|u|, and |f(u)| ≤ c3|u|r−1 + c4.
If u0 ∈ C2(Ω), then there exists a unique solution u ∈ C1,2([0, T ]× Ω) to (1)-(2).Furthermore, u ∈ C1,2([0,∞)× Ω) and
supt≥0
||u||C(Ω) ≤ C(Λ),
where C(Λ) depends only on Λ = ||u0||∞.
Proof. The proof of the lemma is similar to that of Theorem 2.3 in [6], and so weomit it here. ¤
Theorem 2.5. Take n = 2 and let Ω = (−L, L) × (−W,W ). If (1)-(2) has asolution such that u(t, x, y) ∈ C1,2([0, T ] × Ω), then the solution of the differencescheme converges to the solution of (1) uniformly, as (4t,4x,4y) → 0 and theconvergence rate is O(4t +4x2 +4y2).
Proof. Let u(t, x, y) be the solution of equation (1). We use the following notation:For 0 ≤ k ≤ K, 0 ≤ i ≤ M, and 0 ≤ j ≤ N, let
Uki j = u(tk, xi, yj).(15)
From the Taylor expansion of u, we also have the following approximations:
ut(tk, xi, yj) =Uk+1
i j − Uki, j
4t+ O(4t)(16)
for k ≥ 0. Also,
∫
Ω
J(xi − x, yj − y)u(tk, x, y)dx dy = (J ∗ Uk)i j + O(4x2 +4y2)(17)
and
∫
Ω
J(xi − x, yj − y)dx dy = (J ∗ 1)i j + O(4x2 +4y2).(18)
Equations (1), (16)-(18) imply the following estimate holds:
Uk+1i j − Uk
i j
4t= (J ∗ Uk)i j − (J ∗ 1)i jU
ki j
+ Uki j − (Uk
i j)3 + O(4t +4x2 +4y2).
(19)
We define the error as
V ki, j = Uk
i j − uki, j , for k = 0, 1, · · · ,K, i = 0, 1 · · · ,M, and j = 0, 1, · · · , N.
(20)

NONLOCAL ALLEN-CAHN EQUATION 37
From (8) and (15), we have
V 0i, j = 0 for i = 0, 1 · · · ,M, and j = 0, 1, · · · , N.(21)
For k > 0, (9) and (19) imply that
V k+1i, j = 4t
[(J ∗ V k)i, j − (J ∗ 1)i jV
ki, j + V k
i, j −((Uk
i j)3 − (uk
i, j)2uk+1
i, j
)]
+ V ki, j + 24tO(4t +4x2 +4y2).
(22)
Since
(Uki j)
3 − (uki, j)
2uk+1i, j = (Uk
i j)2(Uk
i j − Uk+1i j )
+ V ki, j(U
ki j + uk
i, j)Uk+1i j + (uk
i, j)2V k+1
i, j ,(23)
equation (22) implies
(1 + 24t(uk
i, j)2)V k+1
i, j
= 4t[(J ∗ V k)i, j − (J ∗ 1)i jV
ki, j + V k
i, j − (Uki j)
2(Uki j − Uk+1
i j )
−V ki, j(U
ki j + uk
i, j)Uk+1i j
]+ V k
i, j + 24tO(4t2 +4x2 +4y2).
(24)
Equation (24) and the boundedness of |Uki j | and |uk
i, j | imply that
maxi,j
|V k+1i, j | ≤ C(Λ1, Λ2, Λ3)4t max
i,j|V k
i, j |+ maxi,j
|V ki, j |+ |4tR2|,(25)
where C(Λ1, Λ2, Λ3) depends only on Λ1 = maxi,j,k |uki, j |, Λ2 = maxi,j,k |Uk
i, j | andΛ3 = sup
∫Ω|J(x− y)|dy, and R2 = O(4t +4x2 +4y2).
Let
Vk = maxi,j
|V ki, j |.
From (25), we have
Vk+1 ≤ (1 + C(Λ1, Λ2,Λ3)4t)Vk +4tR2
≤ (1 + C(Λ1, Λ2,Λ3)4t) [(1 + C(Λ1, Λ2,Λ3)4t)Vk−1 +4tR2] +4tR2
≤ (1 + C(Λ1, Λ2, T )4t)2 Vk−1 + [(1 + C(Λ1, Λ2, Λ3)4t) + 1]4tR2
...
≤ (1 + C(Λ1, Λ2,Λ3)4t)kV1 +
[(1 + C(Λ1, Λ2, Λ3)4t)k−1
+ (1 + C(Λ1,Λ2,Λ3)4t)k−2 + · · ·+ 1]4tR2
≤ eC(Λ1,Λ2,Λ3)4tkV1 +[1 + C(Λ1, Λ2, Λ3)4t]k − 1
C(Λ1,Λ2, Λ3)R2
≤ eC(Λ1,Λ2,Λ3)T V1 +eC(Λ1,Λ2,Λ3)T − 1
C(Λ1, Λ2, Λ3)R2
= O(4t +4x2 +4y2).
(26)
Therefore, the error rate is O(4t +4x2 +4y2). ¤

38 P. W. BATES, S. BROWN, AND J. HAN
3. Applications to Allen-Cahn equation
The method for the nonlocal Allen-Cahn equation can also be applied to theAllen-Cahn equation.
Consider the following problem:ut = 4u− f(u) in (0, T )× Ω
∂u
∂n
∣∣∣∣∂Ω
= 0
u(0, x) = u0(x)
(27)
where f(u) = u3 − u.Our difference scheme for equation (27) with n = 1 is as follows:
δtuki = δ2
xuki + ψ(uk
i , uk+1i ) for 0 ≤ i ≤ M, 1 ≤ k ≤ K − 1(28)
with time and spatial discretization as before. The Neumann boundary conditionis expressed by
uk1 − uk
−1
24x= 0,
ukM+1 − uk
M−1
24x= 0 for 0 ≤ k ≤ K − 1,(29)
where
δtuki =
uk+1i − uk
i
4t,
δ2xuk
i =uk
i+1 − 2uki + uk
i−1
4x2,
and
ψ(uki , uk+1
i ) = uki − (uk
i )2uk+1
i .
Equations (28)-(29) imply
(1 +4t(uk
0)2)uk+1
0 = rx(2uk1 − 2uk
0) + (4t + 1)uk0 for 0 ≤ k ≤ K − 1,(30)
(1 +4t(uk
i )2)uk+1
i = rx(uki+1 − 2uk
i + uki−1) + (4t + 1)uk
i(31)for 1 ≤ i ≤ M − 1, 0 ≤ k ≤ K − 1,
(1 +4t(uk
M )2)uk+1
i = rx(2ukM−1 − 2uk
M ) +4tukM for 0 ≤ k ≤ K − 1,(32)
where rx = 4t4x2 .
Similarly, the difference scheme for n = 2 is
u0i, j = u0(xi, yj), for 0 ≤ i ≤ M, 0 ≤ j ≤ N,(33)
δtuki, j = δ2
xuki, j + δ2
yuki, j + ψ(uk
i, j , uk+1i, j )(34)
for 0 ≤ i ≤ M, 0 ≤ j ≤ N, 1 ≤ k ≤ K − 1
with Neumann boundary condition

NONLOCAL ALLEN-CAHN EQUATION 39
uk1,j − uk
−1,j
24x= 0,
ukM+1,j − uk
M−1,j
24x= 0, for 0 ≤ j ≤ N,
uki,1 − uk
i,−1
24y= 0,
uki,N+1 − uk
i,N−1
24y= 0, for 0 ≤ i ≤ M,
(35)
where
δtuki, j =
uk+1i, j − uk
i, j
4t,
δ2xuk
i, j =uk
i+1, j − 2uki, j + uk
i−1, j
4x2,
δ2yuk
i, j =uk
i, j+1 − 2uki, j + uk
i, j−1
4y2,
and
ψ(uki, j , u
k+1i, j ) = uk
i, j − (uki, j)
2uk+1
i, j .
Let rx = 4t4x2 and ry = 4t
4y2 . From (33)-(35), we have
(1 +4t(uk
i,j)2)uk+1
i,j = rx(uki+1,j + uk
i−1,j) + (1− 2rx − 2ry)uki,j
+ ry(uki,j+1 + uk
i,j−1) +4tuki,j
for 1 ≤ i ≤ M − 1, 1 ≤ j ≤ N − 1,
(36)
(1 +4t(uk
0,0)2)uk+1
0,0 = 2rxuk1,0 + (1− 2rx − 2ry)uk
0,0 + 2ryuk0,1 +4tuk
0,0,(37)
(1 +4t(uk
0,N )2)uk+1
0,N = 2rxuk1,N + (1− 2rx − 2ry)uk
0,N
+ 2ryuk0,N−1 +4tuk
0,N ,(38)
(1 +4t(uk
M,0)2)uk+1
M,0 = 2rxukM−1,0 + (1− 2rx − 2ry)uk
M,0
+ 2ryukM,1 +4tuk
M,0,(39)
(1 +4t(uk
M,N )2)uk+1
M,N = 2rxukM−1,N + (1− 2rx − 2ry)uk
M,N
+ 2ryukM,N−1 +4tuk
M,N ,(40)
(1 +4t(uk
0,j)2)uk+1
0,j = 2rxuk1,j + (1− 2rx − 2ry)uk
0,j
+ ry(uk0,j+1 + uk
0,j−1) +4tuk0,j
for 1 ≤ j ≤ N − 1,
(41)
(1 +4t(uk
M,j)2)uk+1
M,j = 2rxukM−1,j + (1− 2rx − 2ry)uk
M,j
+ ry(ukM,j+1 + uk
M,j−1) +4tukM,j
for 1 ≤ j ≤ N − 1,
(42)
(1 +4t(uk
i,0)2)uk+1
i,0 = rx(uki+1,0 + uk
i−1,0) + (1− 2rx − 2ry)uki,0
+ 2ryuki,1 +4tuk
i,0 for 1 ≤ i ≤ M − 1,(43)

40 P. W. BATES, S. BROWN, AND J. HAN
(1 +4t(uk
i,N )2)uk+1
i,N = rx(uki+1,N + uk
i−1,N ) + (1− 2rx − 2ry)uki,N
+ 2ryuki,N−1 +4tuk
i,N for 1 ≤ i ≤ M − 1.(44)
Theorem 3.1. If u(0, x, y) ∈ C(Ω), then there exists a unique solution to thedifference equations (28)-(29), and if rx + ry ≤ 1
2 we have
(45) maxi, j
|uki, j | ≤ C
for some constant C which is independent of k, i.e., the scheme is stable under themaximum norm.
Proof. From equations (33), (36)-(44), it is clear that the scheme is uniquely solv-able.
Set Λ = max |u0(x, y)|.For k = 0,
maxi,j
|u0i, j | = max |u0(x, y)| = Λ(46)
For 0 ≤ k ≤ K, denote ak = max |uki, j |. If rx +ry ≤ 1
2 , equations (36)-(44) imply
ak+1 ≤ (1 +4t)ak ≤ (1 +4t)2ak−1
· · ·≤ (1 +4t)k+1a0 ≤ C(T )Λ.
(47)
Therefore,
maxi, j, k
|uki, j | ≤ C(T )Λ,(48)
where C(T ) is independent of k and of the spatial mesh size.¤
Next we consider error estimates for the proposed scheme.
Theorem 3.2. If (27) has a solution such that u(t, x, y) ∈ C1,2([0, T ] × Ω), thenthe solution of the difference scheme converges to the solution of (27) uniformly, as(4t,4x,4y) → 0 and the convergence rate is O(4t +4x2 +4y2).
Proof. Let u(t, x, y) be the solution of equation (27). As before, for 0 ≤ k ≤ K, 0 ≤i ≤ M, and 0 ≤ j ≤ N, let
Uki j = u(tk, xi, yj).(49)
We have for k ≥ 0,
ut(tk, xi, yj) =Uk+1
i, j − Uki, j
4t+ O(4t),(50)
uxx(tk, xi, yj) =Uk
i+1, j − 2Uki, j + Uk
i−1,j
4x2+ O(4x2),(51)
uyy(tk, xi, yj) =Uk
i, j+1 − 2Uki, j + Uk
i,j−1
4y2+ O(4y2).(52)

NONLOCAL ALLEN-CAHN EQUATION 41
Equations (27), (50)-(52) imply the following difference equations:
Uk+1i, j − Uk
i, j
4t=
Uki+1, j − 2Uk
i, j + Uki−1,j
4x2
+Uk
i, j+1 − 2Uki, j + Uk
i,j−1
4y2+ Uk
i, j − (Uki, j)
3 + R,
(53)
Uk1,j = Uk
−1,j + O(4x2), UkM+1,j = Uk
M−1,j + O(4x2), for 0 ≤ j ≤ N,
Uki,1 = Uk
i,−1 + O(4y2), Uki,N+1 = Uk
i,N−1 + O(4y2) for 0 ≤ i ≤ M(54)
where R = O(4t +4x2 +4y2).We define the error as
V ki, j = Uk
i j − uki, j , for k = 0, 1, · · · ,K, i = 0, 1 · · · ,M, and j = 0, 1, · · · , N.
(55)
From (33), (36)-(44) and (53)-(54), we have
V k+1i, j = rx(V k
i+1,j + V ki−1,j) + ry(V k
i,j+1 + V ki,j−1)
+ (1− 2rx − 2ry)V ki,j +4tV k
i, j
−4t((Uk
i, j)3 − (uk
i, j)2uk+1
i, j
)) +4tR1(4t,4x,4y).
(56)
Since
(Uki j)
3 − (uki, j)
2uk+1i, j = (Uk
i j)2(Uk
i j − Uk+1i j )
+ V ki, j(U
ki j + uk
i, j)Uk+1i j
+ (uki, j)
2V k+1i, j ,
(57)
equations (54), (55) and (56) imply
(1 + 24t(uki, j)
2)V k+1i, j
= rx(V ki+1,j + V k
i−1,j) + ry(V ki,j+1 + V k
i,j−1) + (1− 2rx − 2ry)V ki,j
+4tV ki, j −4t(Uk
i j)2(Uk
i j − Uk+1i j )
−4tV ki, j(U
ki j + uk
i, j)Uk+1i j +4tR1(4t,4x,4y).
(58)
If rx + ry ≤ 12 , equation (57) and the boundedness of |Uk
i, j | and |uki, j | imply that
maxi,j
|V k+1i, j | ≤ (1 + C(Λ1, Λ2)4t)max
i,j|V k
i, j |+ |4tR2|,(59)
where C(Λ1,Λ2) depends only on Λ1 = maxi,j,k |uki, j | and Λ2 = maxi,j,k |Uk
i, j |, andR2 = O(4t +4x2 +4y2).
Equation (59) implies
maxi,j
|V k+1i, j | ≤ C(Λ1, Λ2)(4t +4x2 +4y2).(60)
Therefore, the error is O(4t +4x2 +4y2). ¤

42 P. W. BATES, S. BROWN, AND J. HAN
4. Numerical results
In this section, we present some results of computational experiments to showthat the proposed difference scheme is stable and gives reasonable solutions.
Case 1: The diffusion part is small, i.e., ε is small.In this case, we consider the following two equations:
ut =
∫Ω
Jε(x− y)u(y)dy − ∫Ω
Jε(x− y)dy u(x)− f(u)u(0, x) = u0(x),
(61)
ut = ε24u− f(u)∂u∂n |∂Ω = 0u(0, x) = u0(x)
(62)
where f(u) = u3 − u and Jε = 1εn J(x
ε ) for a fixed kernel J . Note that for a largeclass of kernels J , the linear operator on the RHS of (61) is asymptotically close toε2∆ in a certain sense (see [4]).
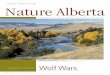
Consider the case n = 1 and Ω = (−1, 1).For the nonlocal Allen-Cahn equation (61), Jε(x) = 1
ε e−( xε )2 , ε = 0.1, 4t =
0.001, and 4x = 0.01. Figure 1 shows the initial data u0(x) = 0.1 cos(2πx) andthe numerical results at t = 0.5, t = 1, t = 5.
For the Allen-Cahn equation (62), ε = 0.1, 4t = 0.0001, and 4x = 0.02. Figure2 shows the numerical results for the Allen-Cahn equation at t = 0, t = 0.5, t = 1,and t = 5.
For n = 2, let Ω = (0, 1)× (0, 1).
For the nonlocal Allen-Cahn equation (61), Jε(x, y) = 1ε e−
x2+y2
ε2 , ε = 0.1,4t = 0.001, 4x = 0.08, and 4y = 0.08. Figure 3 shows the initial data u0(x) =0.1 cos(2πx) ∗ cos(2πy) and the numerical results at t = 0.5, t = 2.5, t = 5.
For the Allen-Cahn equation (62), ε = 0.1, 4t = 0.00001, 4x = 0.02, and4y = 0.02. Figure 4 shows the initial data u0(x) = 0.1 cos(2πx) ∗ cos(2πy) and thenumerical results at t = 0.5, t = 4, t = 10.
From the computational experiments for the nonlocal Allen-Cahn equation forn = 1 and n = 2, we observed that solutions u corresponding to equations (61) tendto patterns that are nearly piecewise constant (Figure 1 and Figure 3) for initialdata −1 ≤ u0(x) ≤ 1. This is consistent with the result in [12]. It is also consistentwith the result in [10] that when t →∞, u will approach a steady state solution of(1). For the steady state solution of (1), see [3] and [14].
From the computational experiments for the Allen-Cahn equation, we observethat although the solution u corresponding to (62) initially increases in time in theregion x|u0(x) > 0 and decreases in time in the region x|u0(x) < 0, it willnot tend to a piecewise constant function. This is because, although the linearoperators are somewhat similar, diffusion is still an unbounded operator and thenonlocal operator is bounded.
Case 2: The diffusion part is large relative to the reaction term.In this case, we consider the following two equations:
ut = D
[∫Ω
Jε(x− y)u(y)dy − ∫Ω
Jε(x− y)dy u(x)]−D1f(u)
u(0, x) = u0(x),(63)

NONLOCAL ALLEN-CAHN EQUATION 43
ut = D24u− f(u)∂u∂n
∣∣∂Ω
= 0u(0, x) = u0(x)
(64)
where f(u) and Jε(x) are defined as before.For n = 1, Figure 5 shows the initial data u0(x) = 2 cos(2πx) and the numerical
results for the nonlocal Allen-Cahn equation at t = 0.5, t = 2, and t = 80 withD = 10, D1 = 0.01, ε = 0.1, 4t = 0.001, and 4x = 0.02.
Figure 6 shows the initial data u0(x) = 2 cos(2πx) and the numerical resultsfor the Allen-Cahn equation at t = 0.05, t = 0.1 and t = 0.2. with D2 = 2,4t = 0.00001, and 4x = 0.02.
For n = 2, Figure 7 shows the initial data u0(x, y) = 2 cos(2πx) cos(2πy) and thenumerical results for the nonlocal Allen-Cahn equation at t = 1, t = 5, and t = 10with D = 6, D1 = 0.01, ε = 0.1, 4t = 0.001, 4x = 0.05, and 4y = 0.05.
Figure 8 shows the initial data u0(x, y) = 2 cos(2πx) cos(2πy) and the numericalresults for the Allen-Cahn equation at t = 1, t = 2 and t = 5. with D2 = 2,4t = 0.00001, 4x = 0.02, and 4y = 0.02.
From these numerical experiments for the Allen-Cahn equation and the nonlocalAllen-Cahn equation, we observe that the solution u corresponding to the Allen-Cahn equation converges to zero rapidly since the diffusion term is very large.We also observe that although u(t, x) corresponding to the nonlocal Allen-Cahnequation decreases when t increases, the speed is slower than that of the Allen-Cahn equation.
Remark 4.1. Since we consider both large and small diffusion cases for equations(1) and (5) in this section, instead of equations (1) and (5), we consider equations(61)and (62). By checking the proof of Theorem 2.5 and Theorem 3.2, we see thatthe convergence rate for the nonlocal Allen-Cahn equation (61) and the Allen-Cahnequation (62) also depends on ε. Actually, for the nonlocal Allen-Cahn equation(61), if Jε(x, y) = 1
ε2 j(xε , y
ε ) in Theorem 2.5, we have
∫
Ω
Jε(xi − x, yj − y)dx dy
=∫ L
−L
∫ W
−W
1ε2
j
(xi − x
ε,yj − y
ε
)dxdy
=∫ xi+L
ε
xi−L
ε
∫ xi+W
ε
xi−W
ε
j(u, v)dudv.
(65)
When we use the trapezoidal method to approximate∫ xi+L
εxi−L
ε
∫ xi+W
εxi−W
ε
j(u, v)dudv,
the truncation error is O(4u2 + 4v2) 1ε . Since u = xi−x
ε , v = yj−yε , we have
O(4u2 +4v2) 1ε = O(4x2 +4y2) 1
ε3 . Therefore, we have
∫ xi+L
ε
xi−L
ε
∫ xi+W
ε
xi−W
ε
j(u, v)dudv = (j ∗ 1)i j + O(4x2 +4y2)1ε3
(66)
Similarly,

44 P. W. BATES, S. BROWN, AND J. HAN
∫
Ω
Jε(xi − x, yj − y)u(tk, x, y)dx dy = (J ∗ Uk)i j + O(4x2 +4y2)1ε3
.(67)
Following the proof of Theorem 2.5((19)-(25)), we have
Vk+1 ≤ O
(4t + (4x2 +4y2)
1ε3
).(68)
Therefore, the convergence rate for equation (61) is O(4t + (4x2 +4y2) 1ε3 ). If
ε is small, the mesh size 4x and 4y should be chosen correspondingly small.For the Allen-Cahn equation (62), if we check the proof of Theorem 3.2, we have
Uk+1i, j − Uk
i, j
4t= ε2
Uki+1, j − 2Uk
i, j + Uki−1,j
4x2
+ ε2Uk
i, j+1 − 2Uki, j + Uk
i,j−1
4y2
+ Uki, j − (Uk
i, j)3 + O(4t + ε24x2 + ε24y2).
(69)
Instead of rx + ry ≤ 12 , we require ε(rx + ry) ≤ 1
2 , where rx and ry are definedas before.
We have
maxi,j
|V k+1i, j | ≤ C(4t + ε24x2 + ε24y2).(70)
Therefore, the convergence rate for equation (62) is O(4t + ε24x2 + ε24y2).
Acknowledgments
The authors would like to thank the referees for helpful suggestions. Peter W.Bates acknowledges partial support through NSF award DMS-0401708 and throughthe generous hospitality of the Institute for Mathematics and its Applications.
References
[1] G. Barles and P. Souganidis, A new approach to front propagation problems: theory andapplications, Arch. Rational Mech. Anal. 141 (1998), 237-296.
[2] P. W. Bates, On some nonlocal evolution equations arising from materials science Fields Inst.Communications, Vol 48(2006), 13-52.
[3] P. W. Bates and A. Chmaj, An integrodifferential model for phase transitions: stationarysolution in higher space dimensions, J. Stat. Phys. 95 (1999), 1119-1139.
[4] P. W. Bates, X.Chen and A. Chmaj, Traveling waves of bistable dynamics on a lattice SIAMJ. MATH. ANAL Vol. 35, No. 2 (2003), 520-546.
[5] P. Bates, P. Fife, X. Ren, and X. Wang, Traveling waves in a convolution model for phasetransitions, Arch. Rational Mech. Anal. 138(1997), 105-136.
[6] P. Bates, J. Han, and G. Zhao, On a nonlocal phase-field system, Nonlinear Analysis 64(2006), No. 10, 2251-2278.
[7] L. Bronsard and R. V. Kohn, On the slowness of phase boundary motion in one space di-mension, Comm. Pure Appl. Math.43 (1990), 983-997.
[8] J. G. Carr, M. E. Gurtin, M. Slemrod, Structured phase transitions on a finite interval, Arch.Rat. Mech. Anal. 86 (1984) 317-351.
[9] X. Chen, Generation and propagation of interface for reaction-diffusion equations, J. Diff.Equations 96 (1992), 116-141.
[10] E. Feireisl, F. I. Roch, and H. Petzeltova, A non-smooth version of the Lojasiewicz-Simontheorem with applications to non-local phase-field systems, J. Diff. Eq. 199 (2004), 1-21.
[11] P. C. Fife, Some nonclassical trends in parabolic and parabolic-like evolutions, Trends innonlinear analysis, 153–191, Springer, Berlin, 2003.

NONLOCAL ALLEN-CAHN EQUATION 45
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
u0(x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1u(0.5,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1 u(1,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1u(5,x)
x−axis
u−ax
is
Figure 1. Nonlocal Allen Equation for n = 1 with a small diffu-sion coefficient.
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
u0(x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1u(.5,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1 u(5,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1u(80,x)
x−axis
u−ax
is
Figure 2. Allen-Cahn equation for n = 1 with a small diffusion coefficient.

46 P. W. BATES, S. BROWN, AND J. HAN
−10
1
−10
1−1
0
1
x−axis
u(0,x,y )
y−axis
z−ax
is
−10
1
−10
1−1
0
1
x−axis
u(0.5,x,y )
y−axis
z−ax
is
−10
1
−10
1−1
0
1
x−axis
u(2.5,x,y )
y−axis
z−ax
is
−10
1
−10
1−1
0
1
x−axis
u(5,x,y )
y−axis
z−ax
is
Figure 3. Nonlocal Allen-Cahn equation for n = 2 with a smalldiffusion coefficient.
Figure 4. Allen-Cahn equation for n = 2 with a small diffusion coefficient.

NONLOCAL ALLEN-CAHN EQUATION 47
−1 −0.5 0 0.5 1−2
−1
0
1
2u(0,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−2
−1
0
1
2u(0.5,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−2
−1
0
1
2 u(2,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−2
−1
0
1
2u(10,x)
x−axis
u−ax
is
Figure 5. Nonlocal Allen Equation for n = 1 with a large diffu-sion coefficient.
−1 −0.5 0 0.5 1−2
−1
0
1
2
u0(x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−2
−1
0
1
2u(0.05,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−2
−1
0
1
2 u(0.1,x)
x−axis
u−ax
is
−1 −0.5 0 0.5 1−2
−1
0
1
2u(0.2,x)
x−axis
u−ax
is
Figure 6. Allen-Cahn equation for n = 1 with a large diffusion coefficient.

48 P. W. BATES, S. BROWN, AND J. HAN
−10
1
−1
0
1−2
0
2
x−axis
u(0,x,y )
y−axis
z−ax
is
−10
1
−1
0
1−2
0
2
x−axis
u(1,x,y )
y−axis
z−ax
is
−10
1
−1
0
1−2
0
2
x−axis
u(5,x,y )
y−axis
z−ax
is
−10
1
−10
1−2
0
2
x−axis
u(10,x,y )
y−axis
z−ax
is
Figure 7. Nonlocal Allen-Cahn equation for n = 2 with a largediffusion coefficient.
Figure 8. Allen-Cahn equation for n = 2 with a large diffusion coefficient.

NONLOCAL ALLEN-CAHN EQUATION 49
[12] P. Fife and X. Wang, A convolution model for interfacial motion: the generation and propa-gation of internal layers in higher space dimensions, Adv. Diff. Eqs., 3 (1998), 85-110.
[13] X. Feng and A. Prohl Numerical analysis of the Allen-Cahn equation and approximation formean curvature flows. Numer. Math. 3 (2003), 35-65.
[14] J. Han, The Cauchy problem and steady state solutions for a nonlocal Cahn-Hilliard equatione. j. diff. eqs. 113 (2004) 1-9.
[15] T. Kuhn Convergence of a fully discrete approximation for advected mean curvature flowsIMA J. Numer. Anal. 18(4), (1998) 595-634.
[16] A. de Masi, E. Orlandi, E. Presutti, and L. Triolo, Stability of the interface in a model ofphase separation, Proc. Roy. Soc. Edin. A 124 (1994) 1013-1022.
[17] A. de Masi, E. Orlandi, E. Presutti, and L. Triolo, Uniqueness and global stability of theinstanton in nonlocal evolution equations, Rend. Math. 14 (1994) 693-723.
[18] B. Nicolaenko, B. Scheurer and R. Temam, Some global dynamical properties of a class ofpattern formation equations, Comm. P. D. E. 14 (1989), 245-297.
Department of Mathematics, Michigan State University East Lansing, MI 48824, USAE-mail : [email protected]
Department of Mathematics, Southern Utah University, Cedar City, UT 84720, USAE-mail : brown [email protected] and [email protected]