Embed Size (px)
DESCRIPTION
UPAYA MEMPERTAHANKAN STATIK DAN DINAMIK SHAFT ALIGMENT AKIBAT PENGARUH GETARAN SISTEM PERMESINAN KAPAL1 2004
Citation preview

MAJALAH KAPAL - 24 -
UPAYA MEMPERTAHANKAN STATIK DAN DINAMIK SHAFT ALIGMENT AKIBAT PENGARUH GETARAN SISTEM
PERMESINAN KAPAL
Ari Wibawa Budi Santosa*)
Abstract
In the operation of machinery system, the alignment of axis has to maintain in a static and dynamic condition. So a vibration that was produced by a system must be safe for it self or another system. The using of center foundation can reduce the vibration influence to another system, but its usage has to maintain the alignment of the axis. In this case, it can be seen the rate equation of damping that can be used for a simple case, by a simulation comparison of a equipment mass, that is a source of vibration, with another mass of equipment. Keywords: damping, machinery system, center foundation Latar Belakang Untuk menggerakkan kapal maupun untuk keperluan lain, sistem permesinan dikapal memegang peranan yang sangat penting untuk menyediakan daya. Tetapi sering kali sistem menjadi sumber getaran yang mempengaruhi kinerja sistem itu sendiri maupun sistem-sistem yang lain. Getaran kapal adalah suatu bagian dari keseluruhan masalah yang tercakup dalam ship dynamics (dinamika kapal). Untuk itu kita harus melihat kemungkinan sumber getaran atau eksitasi dari system beberapa kemungkinan sumber getaran seperti mesin induk, baling-baling dan gelombang laut. Pada kapal-kapal riset misalnya yang memiliki peralatan ukur yang sangat sensitif, maka diharapkan pengaruh getaran dari sistem permesinan ini dapat diminimalkan. *)Staf Pengajar Prog. Studi S-1 Teknik
Perkapalan F. Teknik UNDIP.
Salah satu cara yang telah digunakan adalah pemakaian sistem permesinan pondasi terpusat . Semua peralatan permesinan diletakkan pada suatau bidang / lantai yang disangga oleh suatu sistem peredam, sehingga pengaruh getaran ini dapat direduksi. Pemakaian system sering menimbulkan masalah pada peralatan permesinan seperti yang diungkapkan Suryo W.A (1996) bahwa penggunaan sistem terpusat memang dapat mengurangi pengaruh getaran ke struktur kapal , namun berakibat buruk pada sistem permesinan sendiri. Hasil pengukuran menunjukkan bahwa getaran aksial yang terjadi pada pondasi (diatas peredam ) memiliki tingkat yang berbeda-beda. Pada daerah dengan massa peralatan yang relatif kecil memiliki tingkat getaran yang lebih tinggi dibandingkan pada daerah dengan massa peralatan yang lebih besar. Sehingga terjadi kondisi Dynamic aligment yang berakibat pada pecahnya bearing housing pada

MAJALAH KAPAL - 25 -
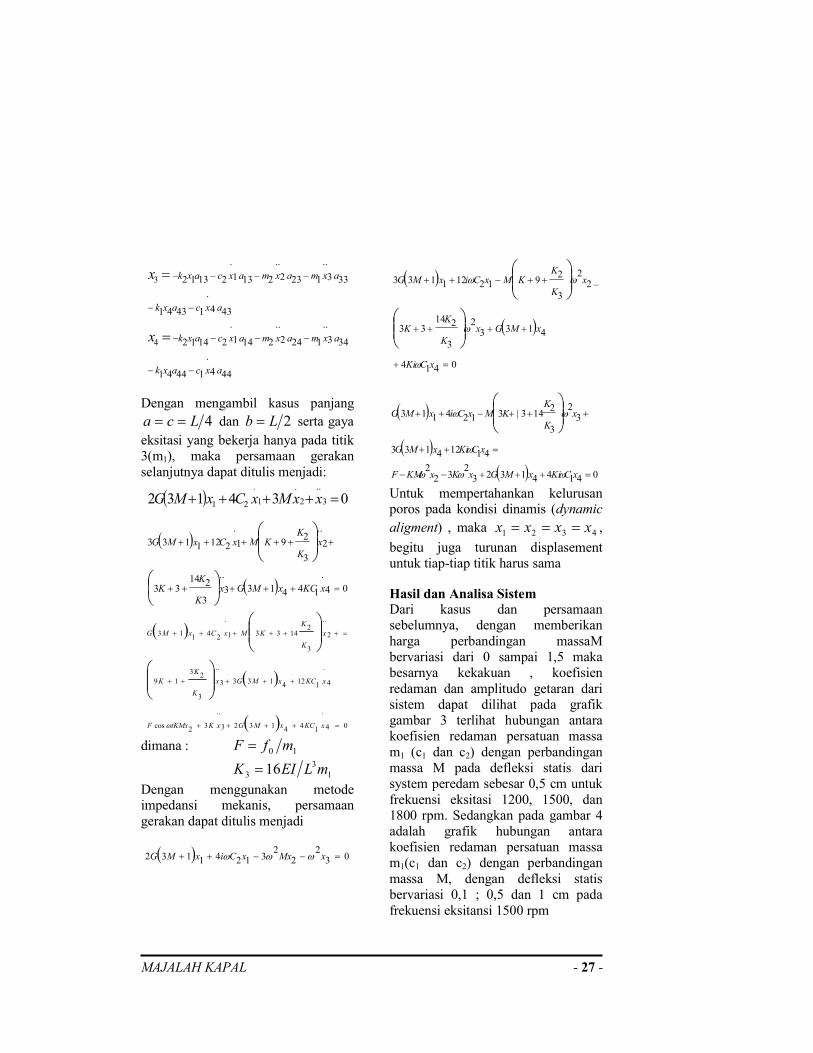
generator, terbakarnya kumparan rotor dan lain sebagainya. Hasil pengukuran menunjukkan bahwa pada kondisi statis poros memiliki kelurusan yang dapat diterima Dari kondisi tersebut maka untuk pemakaian sistem pondasi terpusat perlu kiranya dikaji lebih jauh mengenai sistem peredam yang dipakai pada sistem ini agar kondisi Static dan dynamic aligment dapat terpenuhi. Dalam masalah ini akan disimulasikan nilai peredam dapat dipakai untuk kasus sistem sederhana pada tingkat perbandingan massa peralatan yang berbeda-beda. Sistem Permesinan Pondasi Terpusat Dalam masalah ini sistem yang dianalisa terdiri dari dua buah peralatan dengan massa m1 dan m2 dengan panjang pondasi L. Sistem peredam diletakkan pada tiap–tiap ujung pondasi (skema gambar 1) Peredam bagian kanan memiliki nilai kekakuan k1 dan koefisien redaman c1 sedangkan untuk bagian kiri memiliki nilai kekakuan k2 dan koefisien redaman c2. dalam pengoperasiaannya massa m1 akan menimbulkan gaya Eksitasi tf ωsin0 Untuk proses penghitungan selanjutnya massa m1 akan diberi nilai 1, sedangkan besaran-besaran yang lain merupakan besaran persatuan massa m1.
Prosedur Perhitungan Penentuan harga kekakuan Untuk mendapatkan kondisi static aligment, kekakuan dari peredam
harus diperhatikan. Difleksi Statis (∆ ) yang dialami oleh kedua peredam haruslah sama. Dengan memperhatikan posisi dari tiap maka besarnya harga kekakuan didapat dari persamaan :
( )L
bagmgamk
∆++
= 121
( )L
gcmcbgmk∆
++= 12
2
Dengan mengambil symbol
∆= gG
12 mmM =
111 mkK =
122 mkK = maka besarnya harga kekakuan persatuan massa m1 dapat dirumuskan :
( )baMaGK ++=1
( ){ }ccbMGK ++=2 Sedangkan perbandingan kekakuan k2 dengan k1dapat dinyatakan dalam
( )baMaccbM
kk
K++++
==1
2
Penentuan Persamaan Gerakan Karena pondasi memiliki kekakuan yang mana akan mengalami lendutan jika ada gaya getar, maka dalam penentuan PersamaanGerakan lebih baik menggunakan Metode Koefisien Pengaruh (Influence Coeficient Method), Robert F.S (1989). Koefisien pengaruh didefinisikan

MAJALAH KAPAL - 26 -
sebagai lendutan statis system pada titik tertentu akibat satu satuan gaya yang berkerja pada titik yang lain dengan memperhatikan gambar 1 maka dengan menggunakan metode koefisien pengaruh langkah-langkah penyelesaian dapat dilakukan sebagai berikut : Pada gambar 2.b (lampiran) terlihat bahwa jika satu satuan gaya diberikan pada titik 1, maka titik 1 akan mengalami lendutan a11; titik 2 mengalami lendutan a21; titik 3 mengalami lendutan a31; titik 4 mengalami lendutan a41. Sedangkan untuk l gambar 2.c, jika satu-satuan gaya yang diberikan pada titik 2 maka titik 1 akan mengalami lendutan a12; titik 2 mengalami lendutan a22; titik 3 mengalami lendutan a32; titik 4 mengalami lendutan a42. Begitu pula untuk gaya pada titik 3 dan 4 terlihat pada gambar 2.d dan 2.e (lampiran) Dengan melihat jarak-jarak pada setiap titik, serta kekakuan peredam dan kekuatan pondasi maka besarnya tiap-tiap lendutan didapat:
211 1 ka =
( ) 221 Lkcba +=
231 Lkca =
041 =a
( ) 212 Lkcba +=
( ) ( )[ ]( ) EILcba
LkaLkcbLcbLkaa
622
2
12122
+
+−+++=
( ) ( )[ ]( ) EILacLac
LkaLkcbLcLkaa
6222
12132
−−
+−++=
142 Lkaa =
213 Lkca =
( ) ( )[ ]( ) EILacLac
LkaLkcbLcLkaa
6222
12123
−−
+−++=
( ) ( )[ ]
( ) EILbac
LkbaLkcLcLkbaa
622
2
12133
+
++−++=
( ) 143 Lkbaa +=
014 =a
124 Lkaa =
( ) 134 Lkbaa +=
144 1 ka = Dari harga-harga yang didapatkan pada tiap titik, telah memenuhi pernyataan teori Reciprocal Maxwell yaitu lendutan aij harus sama dengan lendutan aji Robert F.S (1998). Selanjutnya dilakukan perhitungan lendutan total pada kedudukan 1, 2, 3, 4 yaitu :
41
1
4.
14141
313..
1212..
2111.
21112
axcaxk
axmaxmaxcaxkx
−−
−−−−=
424.
14241
323..
1222..
2121.
212122
axcaxk
axmaxmaxcaxkx
−−
−−−−=
MAJALAH KAPAL - 27 -
434.
14341
333..
1232..
2131.
213123
axcaxk
axmaxmaxcaxkx
−−
−−−−=
444.
14441
343..
1242..
2141.
214124
axcaxk
axmaxmaxcaxkx
−−
−−−−=
Dengan mengambil kasus panjang
4Lca == dan 2Lb = serta gaya eksitasi yang bekerja hanya pada titik 3(m1), maka persamaan gerakan selanjutnya dapat ditulis menjadi:
( ) 034132 3
..
2
.
1
.
21 =++++ xxMxCxMG
( )
( ) 04.
144133..
3
21433
2..
3
291.
2121133
=+++++
++++++
xKCxMGxK
KK
xK
KKMxCxMG
( )
( )
( ) 04
.
1441323
..
32cos
4
.
11241333
..
3
2319
2
..
3
214331
.
24113
=++++
+++++
=++++++
xKCxMGxKtKMxF
xKCxMGxK
KK
xK
KKMxCxMG
ω
dimana : 10 mfF =
13
3 16 mLEIK = Dengan menggunakan metode impedansi mekanis, persamaan gerakan dapat ditulis menjadi
( ) 032
22
31241132 =−−++ xMxxCixMG ωωω
( )
( )
0414
41332
3
21433
_22
3
2912121133
=+
++++
++−++
xCKi
xMGxK
KK
xK
KKMxCixMG
ω
ω
ωω
( )
( )( ) 041441323
232
241124133
32
3
2143|3124113
=+++−−
=++
+++−++
xCKixMGxKxKMF
xCKixMG
xK
KKMxCixMG
ωωω
ω
ωω
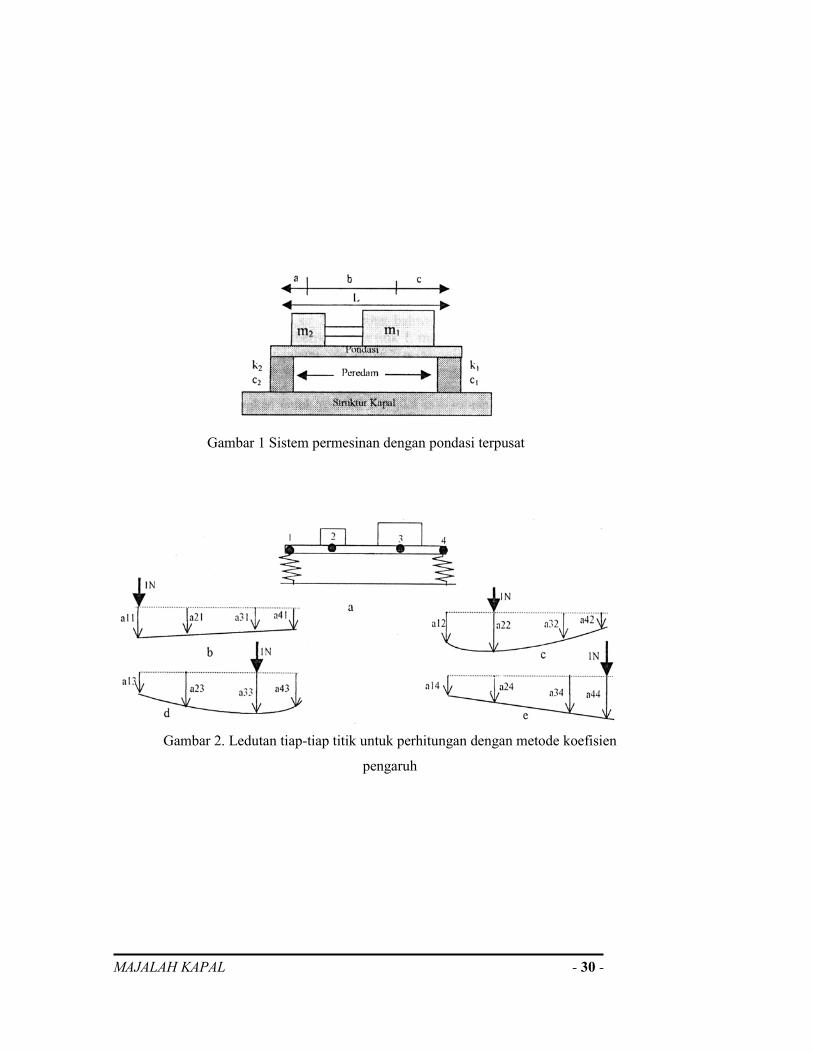
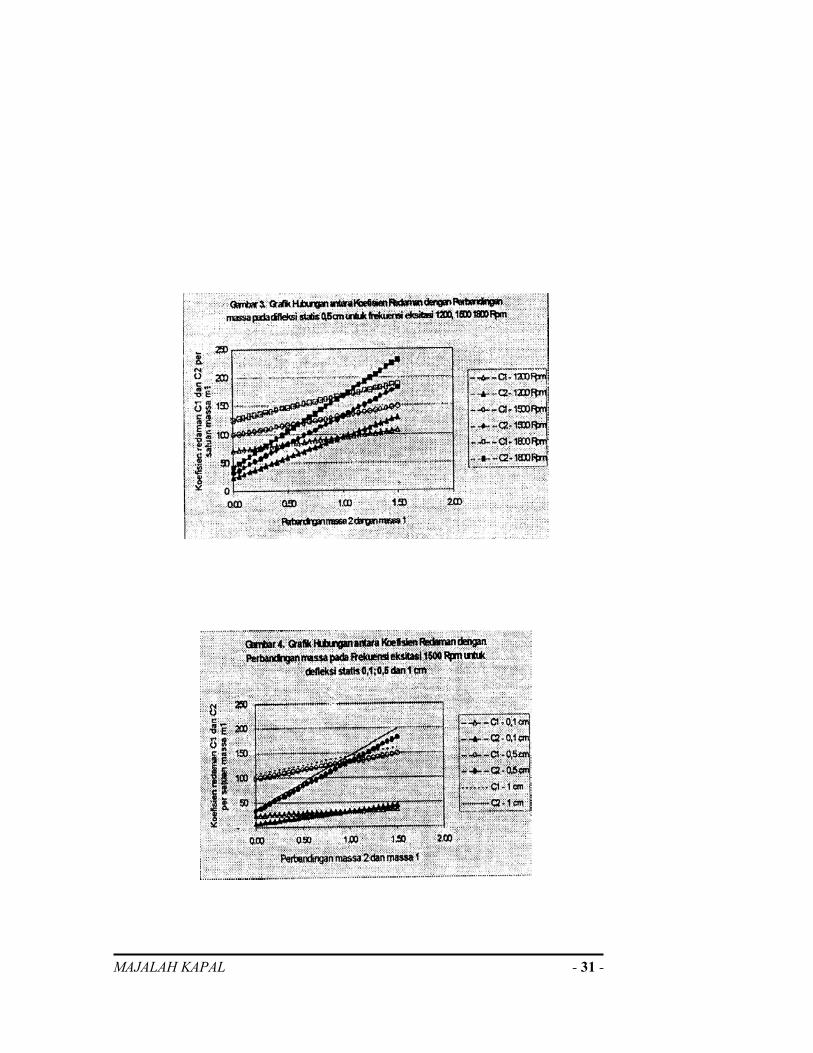
Untuk mempertahankan kelurusan poros pada kondisi dinamis (dynamic aligment) , maka 4321 xxxx === , begitu juga turunan displasement untuk tiap-tiap titik harus sama Hasil dan Analisa Sistem Dari kasus dan persamaan sebelumnya, dengan memberikan harga perbandingan massaM bervariasi dari 0 sampai 1,5 maka besarnya kekakuan , koefisien redaman dan amplitudo getaran dari sistem dapat dilihat pada grafik gambar 3 terlihat hubungan antara koefisien redaman persatuan massa m1 (c1 dan c2) dengan perbandingan massa M pada defleksi statis dari system peredam sebesar 0,5 cm untuk frekuensi eksitasi 1200, 1500, dan 1800 rpm. Sedangkan pada gambar 4 adalah grafik hubungan antara koefisien redaman persatuan massa m1(c1 dan c2) dengan perbandingan massa M, dengan defleksi statis bervariasi 0,1 ; 0,5 dan 1 cm pada frekuensi eksitansi 1500 rpm

MAJALAH KAPAL - 28 -
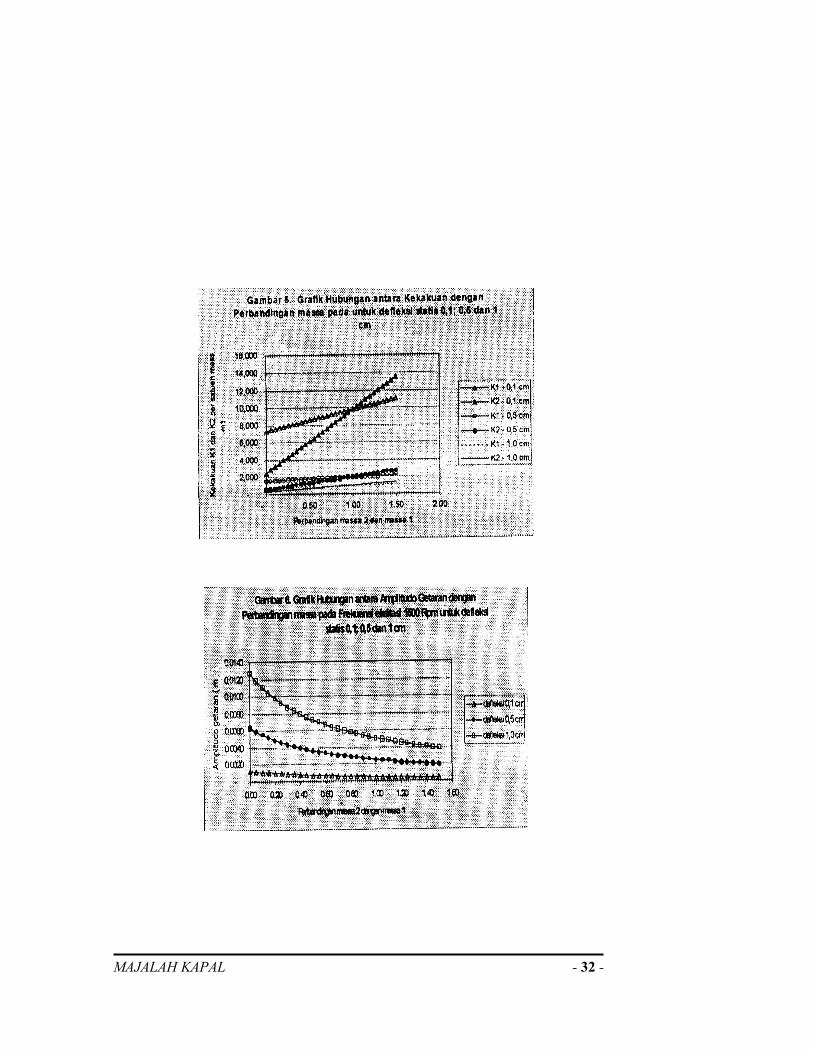
Hubungan antara kekakuan redaman dengan perbandingan massa di gambarkan pada grafik dalam gambar 5. Amplitudo getaran yang diperoleh pada grafik gambar 6, didapat dengan memberikan amplitudo gaya eksitasi sebesar 100 per satuan massa m1 pada frekuensi eksitasi 1500 rpm untuk berbagai tingkat defleksi statis. Dari hasil perhitungan yang diperoleh tersebut terlihat bahwa untuk mendapat kondisi static dan dynamik aligment, dalam penentuan sistem peredam tidak harus memberikan nilai kekakuan dan koefisien redaman yang sama pada setiap tumpuan . Nilai ini tergantung dari besarnya massa yang dimiliki oleh setiap peralatan , serta besarnya frekuensi eksitasi yang bekerja pada sistem. Semakin besar perbandingan massa dari peralatan yang merupakan sumber eksitasi terhadap massa dari peralatan yang lain, maka semakin besar peredam yang harus dipakai. Sedangkan perbandingan harga peredam yang satu dengan yang lain tergantung dari massa dan posisi tiap -tiap peralatan terhadap masing-masing peredam tersebut.. Besarnya amplitudo getaran yang terjadi akan semakin kecil jika massa dari peralatan yang merupakan sumber getar jauh lebih besar dari massa peralatan lain, dengan menggunakan harga koefisien redaman yang sesuai. Disamping itu pula amplitudo ini pula akan lebih kecil jika menggunakan kekakuan redaman yang semakin besar.
Dalam pemilihan peredam untuk dapat mempertahankan static dan dynamik aligment juga harus memperhitungkan besarnya amplitudo gerakan maksimum pada lokasi diatas dan dibawah peredam. penentuan amplitudo maksimum diatas damper dipengaruhi oleh unjuk kerja dari sistem permesinan , sedangkan untuk amplitudo maksimum utuk daerah dibawah damper dipengaruhi oleh besarnya level getaran yang diijinkan kestruktur kapal karena adanya peralatan-peralatan yang sensitif atau karena kondisi yang lain.
Kesimpulan Dari hasil pembahasan diatas dapat disimpulkan bahwa : 1. Untuk mempertahankan kondisi
static dan dynamik aligment pada sistem permesinan pondasi terpusat harus memperhatikan pemakaian peredam.
2. Peredam tidak harus dibuat sama pada masing-masing penyangga.
3. Besarnya kekakuan dan koefisien redaman dari peredam harus memperhatikan massa dari peralatan yang merupakan sumber getar dan massa-massa yang lain serta posisi-posisi dari tiap-tiap peralatan tersebut.
Daftar pustaka Imran , A, “ Getaran Torsional
Pada System Propulsi “, laporan penelitian lembaga penelitian ITS, 1993.
Robert F.S, “ An Introduction to Mechanial Vibration”, John Willey & Sons, 1989

MAJALAH KAPAL - 29 -
Suryo W.A “ Pengembanagan system propulsi Vesi Baru FPB – 28”, laporan penelitian lembaga penelitian ITS, 1996
C. M. Harris, Handbook of Noise Control, McGraw-Hill Book Co, New York. 1979
J.D. Irwin and E.R. Graf, Industrial Noise and Vibration Control, Prentice, 1979
MAJALAH KAPAL - 30 -
Gambar 1 Sistem permesinan dengan pondasi terpusat
Gambar 2. Ledutan tiap-tiap titik untuk perhitungan dengan metode koefisien
pengaruh
MAJALAH KAPAL - 31 -
MAJALAH KAPAL - 32 -




















![MATERI PROSES MANUFAKTUR Pengenalan Teori Permesinan [Compatibility Mode]](https://img.pdfslide.us/doc/110x75/55cf9481550346f57ba27593/materi-proses-manufaktur-pengenalan-teori-permesinan-compatibility-mode.jpg)