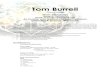
Univ logo UKACC PhD Presentation Showcase Slide 3 Nuclear Decommissioning Left: Brokk Mobile Platform with a pair of HydroLek arms, located in the Lancaster Engineering building. Right: Typical environment to be decomissioned (http://www.wherecoolthingshappen.com/amazing-pictures-inside-a-nuclear-power-plant/)
Univ logo Robotics for Nuclear Decommissioning Drone-Arm
Cooperative Vision Thomas Burrell C.J. Taylor, S.D. Monk, A.
Montazeri Lancaster University Engineering Department UKACC PhD
Presentation Showcase Univ logo UKACC PhD Presentation Showcase
Slide 2 Nuclear Decommissioning Decommissioning Tasks Surveying
Demolition (cutting, lifting, drilling, undoing bolts/screws, )
Removal of waste Why Robots? Human Denied Environment Repetitive
tasks Requires precision for safety Unique Issues Communicating
with the outside world. Solution: Autonomy Information about the
environment Changing Environment No electronic plans Solution:
Computer vision Radioactive contamination Solution: Disposability
Univ logo UKACC PhD Presentation Showcase Slide 3 Nuclear
Decommissioning Left: Brokk Mobile Platform with a pair of HydroLek
arms, located in the Lancaster Engineering building. Right: Typical
environment to be decomissioned
(http://www.wherecoolthingshappen.com/amazing-pictures-inside-a-nuclear-power-plant/)
Univ logo UKACC PhD Presentation Showcase Slide 4 Graphs, pictures
etc. {O} x y z {B} x y z 6 DoF: q = (x,y,z, , , ) C Configuration
space: C 3 3 Also Called Drone, Quadrotor, Quadcopter, Unmanned
Aerial Vehicle (UAV), Micro Aerial Vehicle (MAV) Under actuated - 6
degrees of freedom, 4 actuators Capable of hovering (and VTOL)
Unaffected by terrain Symmetrical design improvement over the
standard helicopter design. Extended perspective for intelligent
decision making Univ logo UKACC PhD Presentation Showcase Slide 5
Conclusion or summary or future work [1] H. Durrant-Whyte and T.
Bailey, "Simultaneous localization and mapping: part I," Robotics
& Automation Magazine, IEEE, vol. 13, pp , [2] R. Smith, M.
Self, and P. Cheeseman, "Estimating Uncertain Spatial Relationships
in Robotics," in Autonomous Robot Vehicles, I. Cox and G. Wilfong,
Eds., ed: Springer New York, 1990, pp Univ logo Inverse Kinematics
UKACC PhD Presentation Showcase Slide 6 Univ logo Goals and
Research UKACC PhD Presentation Showcase Slide 7 Objectives Use
drone as a mobile sensor platform to collect data about the
environment. Process information for better decision making during
demolition tasks. Robotic grasping using extra information. Areas
for Development Low cost SLAM Autonomous Flight Inter robot
communication Arm Inverse Kinematics Univ logo Thank You UKACC PhD
Presentation Showcase Slide 8