Embed Size (px)
Citation preview
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS USING
COLOR, SYMMETRY AND SPATIOTEMPORAL INFORMATION
George Siogkas Evangelos Skodras
Evangelos Dermatas
Electrical & Computer Engineering Dept. University of Patras, Greece
International Conference on Computer Vision Theory and Applications VISAPP 2012 – Rome, Italy
GOAL
Develop a system for automated vision based detection of traffic lights, robust
even under adverse conditions.
Why is this system important?
To warn drivers for red-light running dangers.
For autonomous vehicles driving in existing road
infrastructure.

Why hasn’t it been solved yet?
Traffic sign recognition has taken all the glory.
Big dataset, thus more challenging
Google Scholar Search (February 21st, 2012): • “Traffic sign recognition” approx. 1660 results. • “Traffic light recognition” approx. 75 results
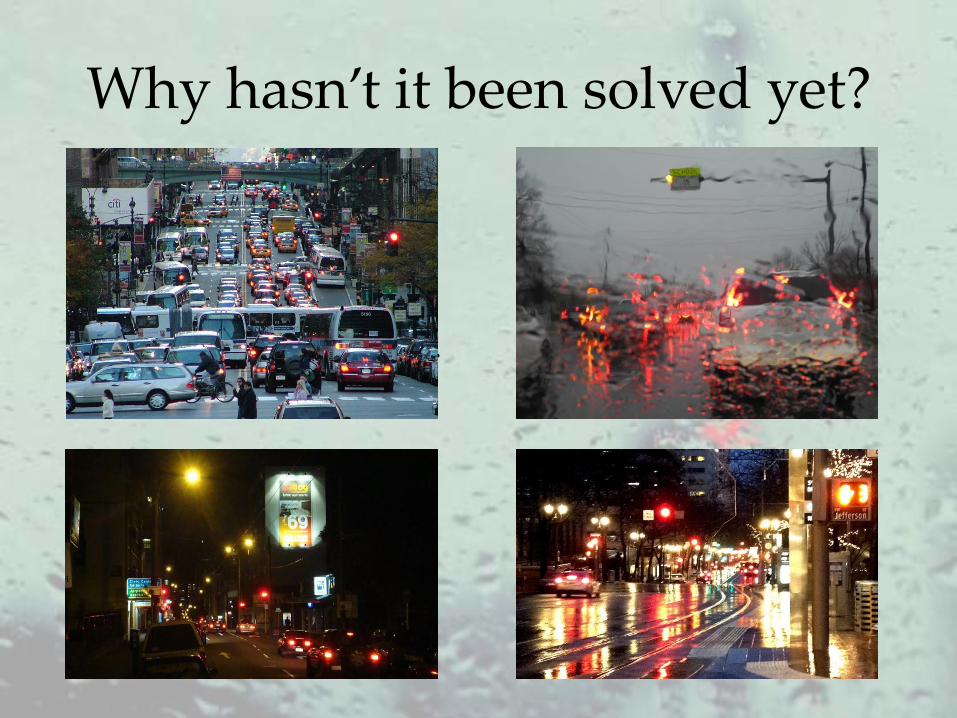
Big cities pose an extremely hard problem because of multiple light sources.
Why hasn’t it been solved yet?
Night driving is also a challenging scenario.
Bad weather makes detection even more difficult.
Combining all of the above, even in small scale, makes detection almost impossible.
What has been tried?
• Color thresholding in RGB or HSV
• Symmetry Detection with Hough or other novel methods.
• Structural Models of Traffic Lights.
• Tracking modules to help minimize false positive results.
• A mixture of the above.
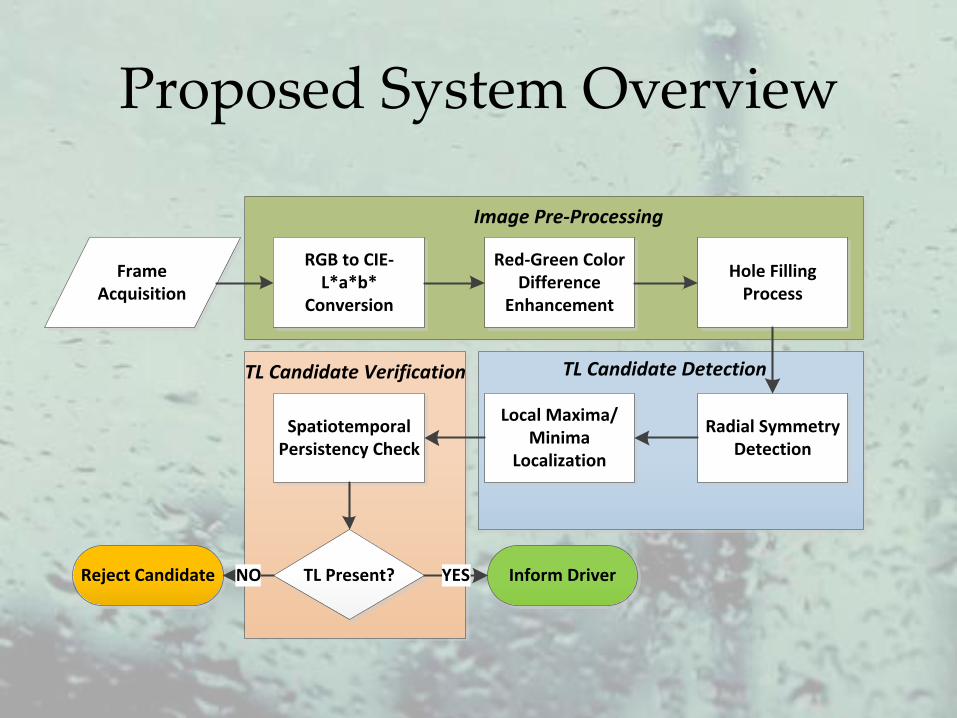
Proposed System Overview
Frame Acquisition
RGB to CIE-L*a*b*
Conversion
Red-Green Color Difference
Enhancement
Hole Filling Process
Radial Symmetry Detection
Local Maxima/Minima
Localization
Spatiotemporal Persistency Check
TL Present?Reject Candidate NO Inform DriverYES
Image Pre-Processing
TL Candidate DetectionTL Candidate Verification
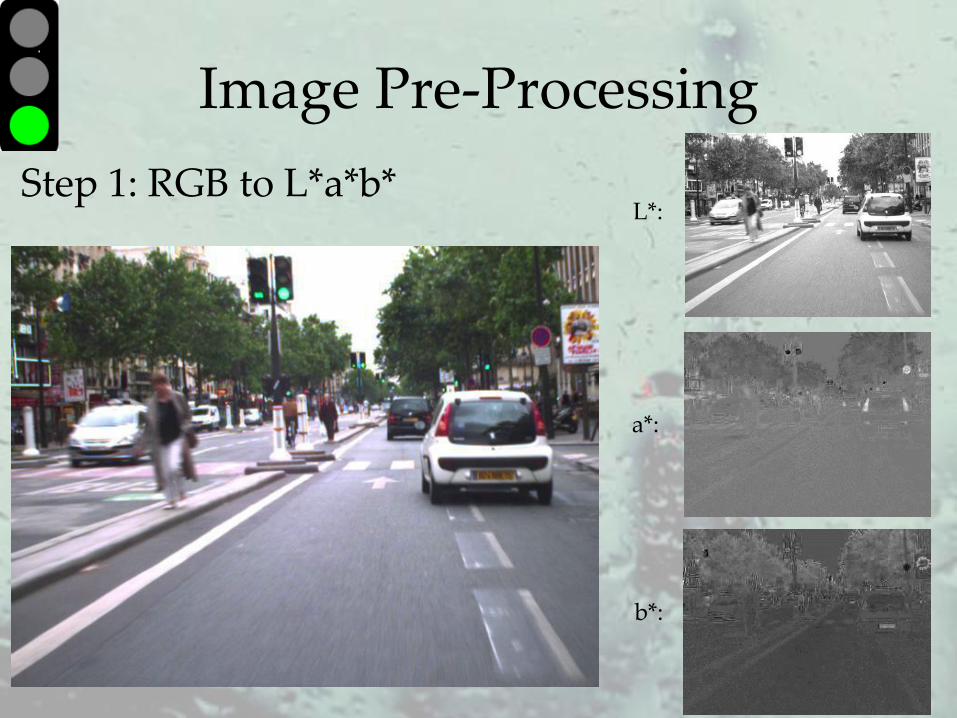
Image Pre-Processing
Step 1: RGB to L*a*b*
L*:
a*:
b*:
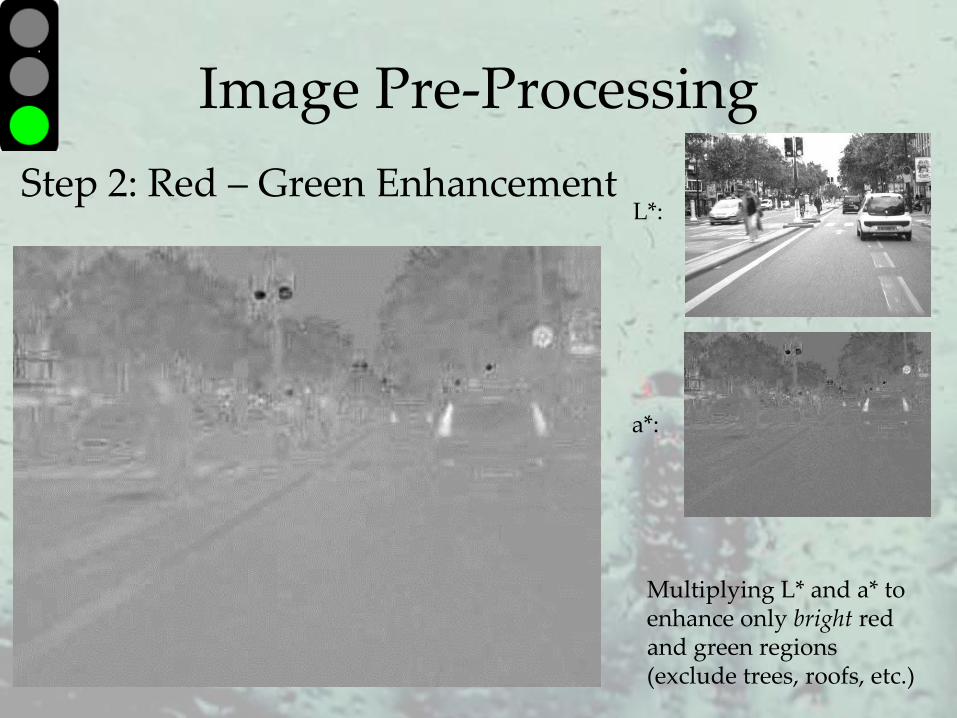
Image Pre-Processing
Step 2: Red – Green Enhancement
L*:
a*:
Multiplying L* and a* to enhance only bright red and green regions (exclude trees, roofs, etc.)
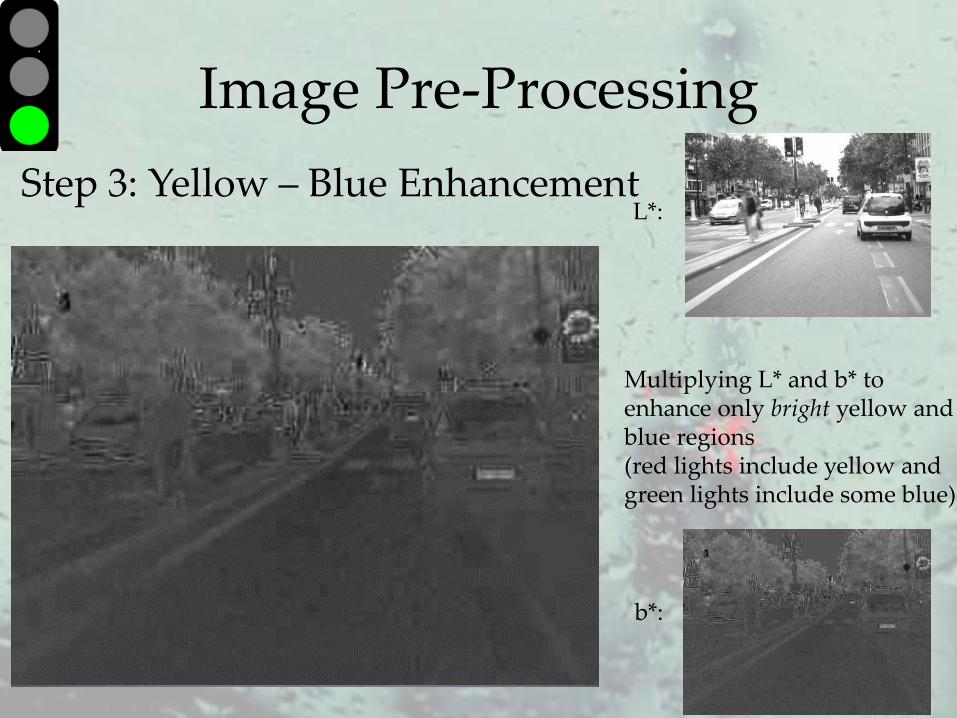
Image Pre-Processing
Step 3: Yellow – Blue Enhancement
L*:
b*:
Multiplying L* and b* to enhance only bright yellow and blue regions (red lights include yellow and green lights include some blue)
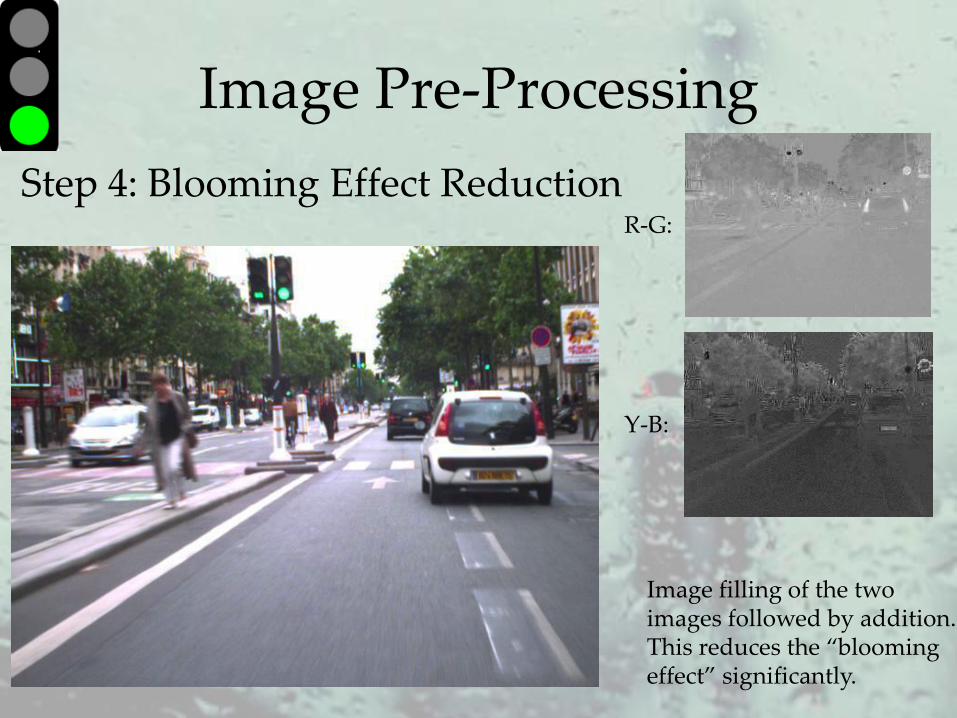
Image Pre-Processing
Step 4: Blooming Effect Reduction
R-G:
Image filling of the two images followed by addition. This reduces the “blooming effect” significantly.
Y-B:
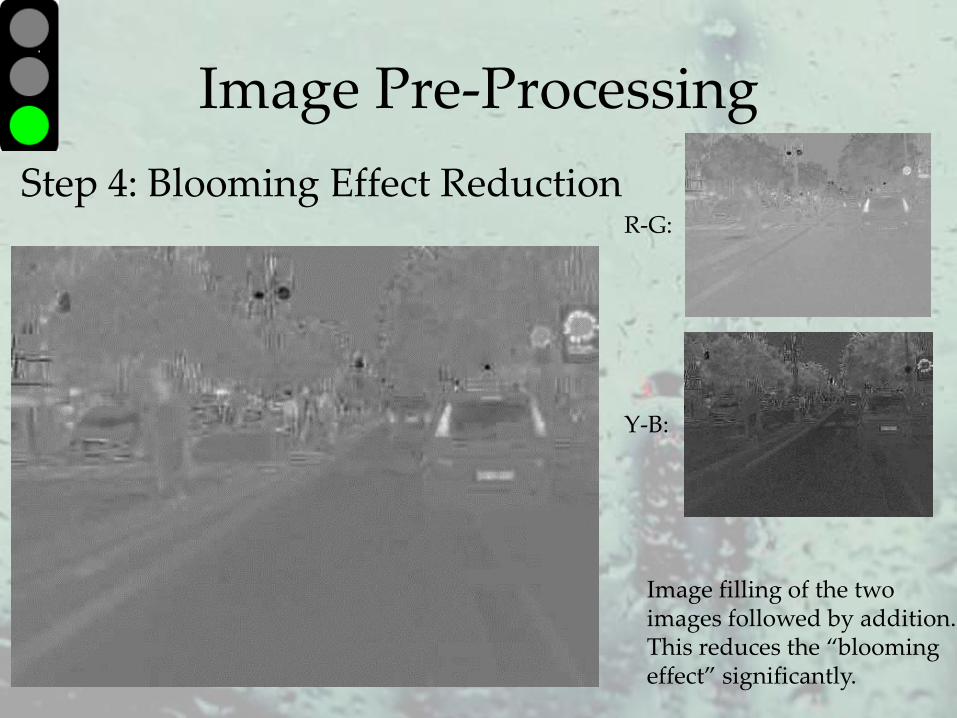
Image Pre-Processing
Step 4: Blooming Effect Reduction
R-G:
Image filling of the two images followed by addition. This reduces the “blooming effect” significantly.
Y-B:
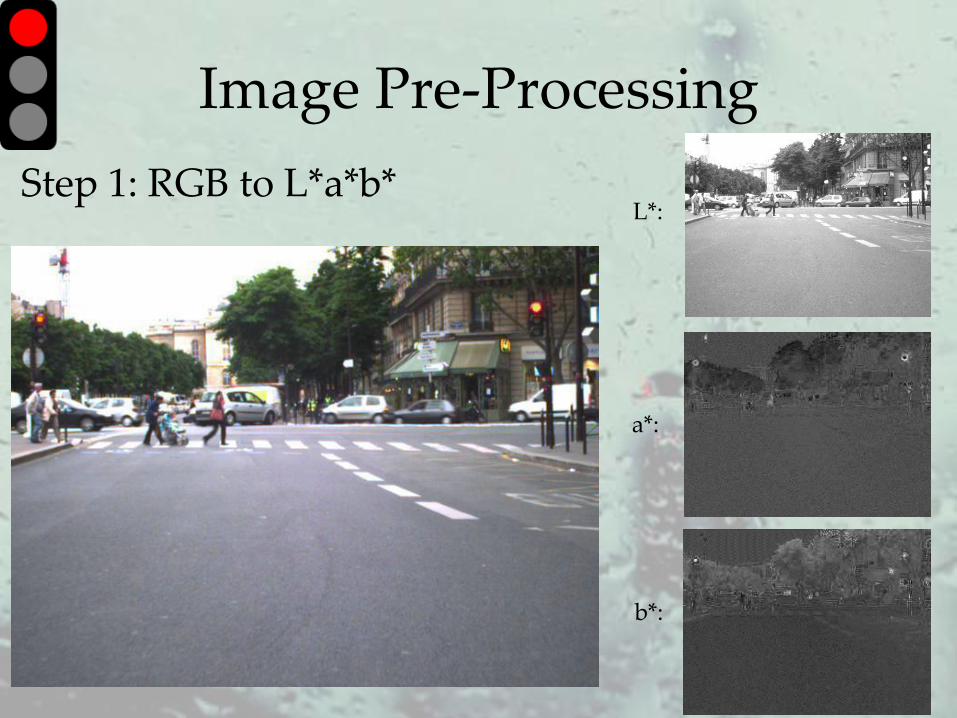
Image Pre-Processing
Step 1: RGB to L*a*b*
L*:
a*:
b*:
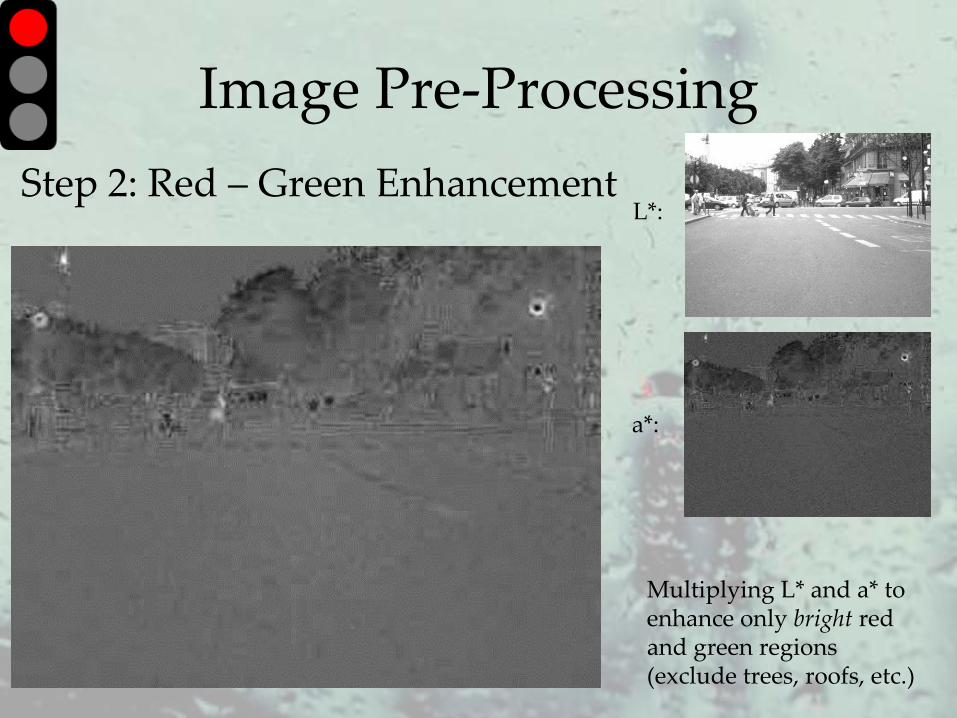
Image Pre-Processing
Step 2: Red – Green Enhancement
L*:
a*:
Multiplying L* and a* to enhance only bright red and green regions (exclude trees, roofs, etc.)
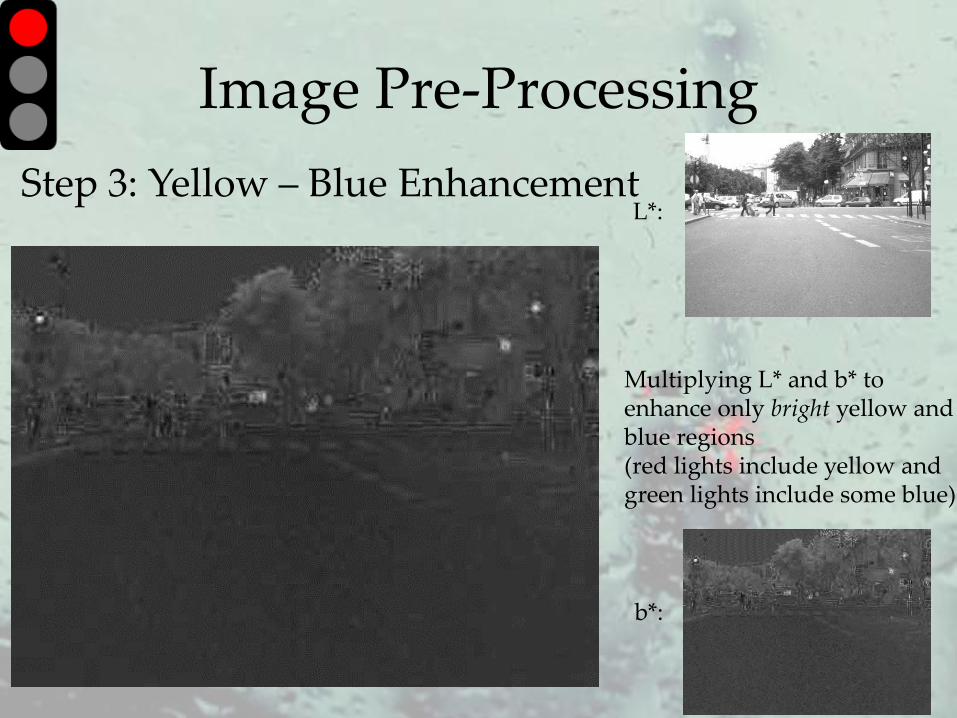
Image Pre-Processing
Step 3: Yellow – Blue Enhancement
L*:
b*:
Multiplying L* and b* to enhance only bright yellow and blue regions (red lights include yellow and green lights include some blue)
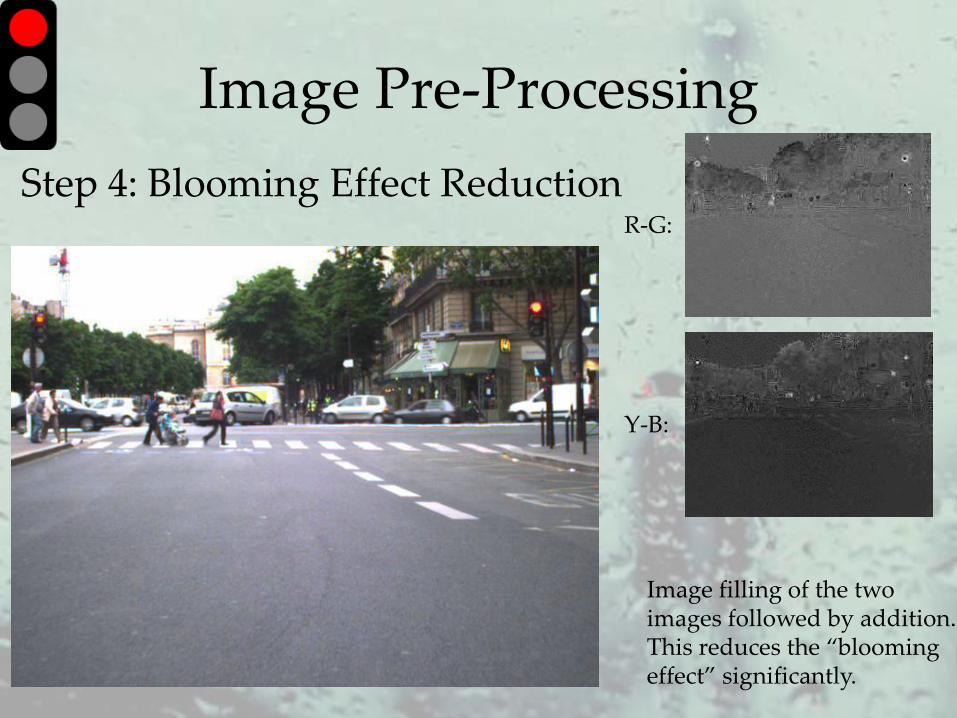
Image Pre-Processing
Step 4: Blooming Effect Reduction
R-G:
Image filling of the two images followed by addition. This reduces the “blooming effect” significantly.
Y-B:
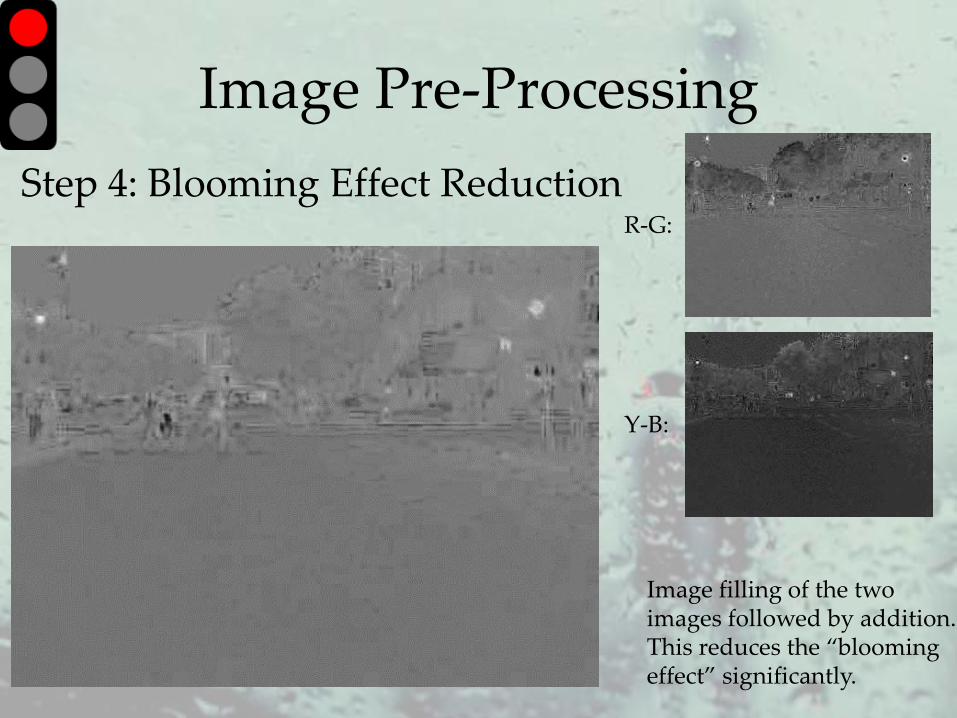
Image Pre-Processing
Step 4: Blooming Effect Reduction
R-G:
Image filling of the two images followed by addition. This reduces the “blooming effect” significantly.
Y-B:
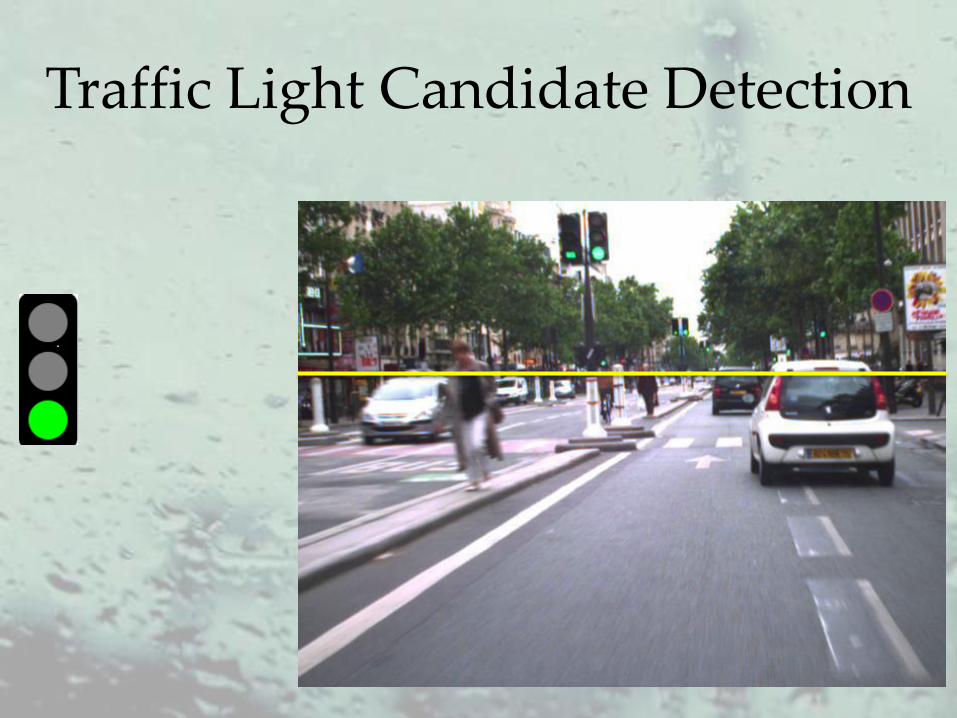
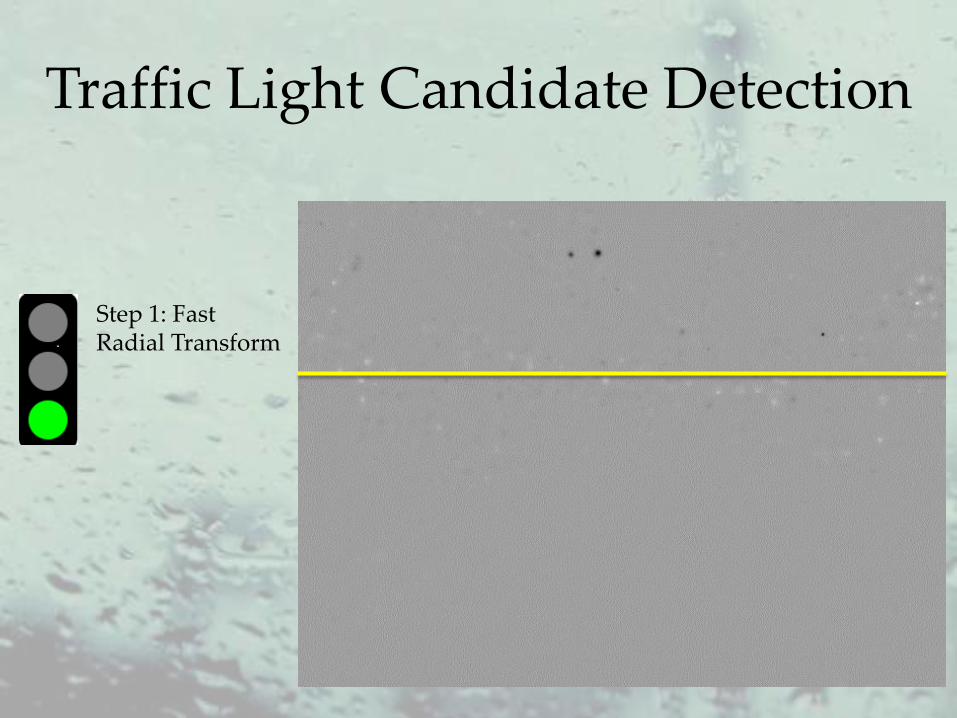
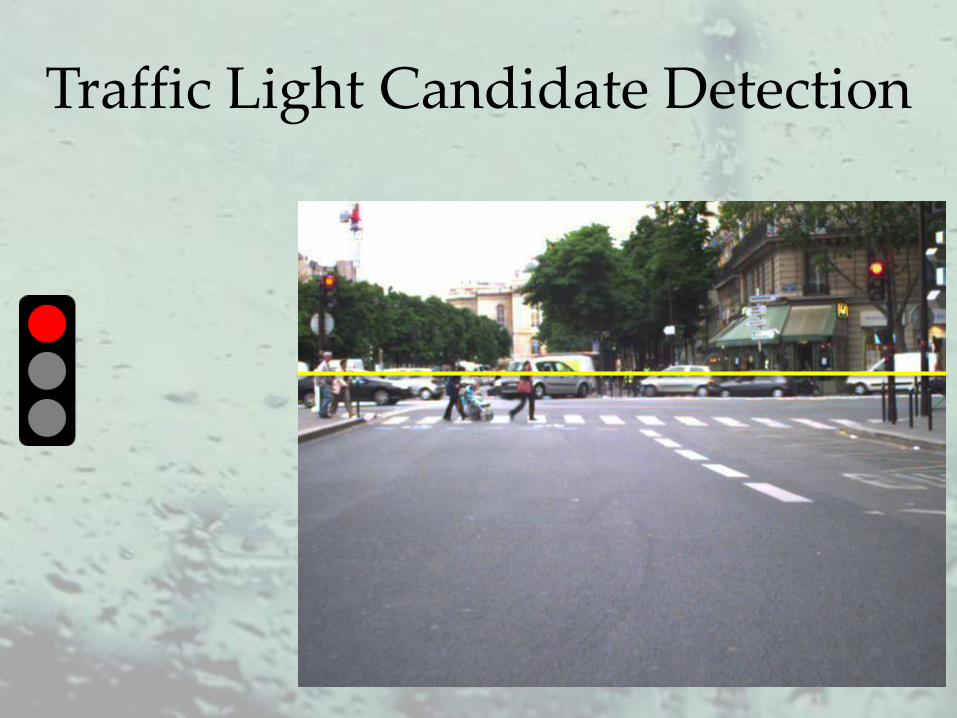
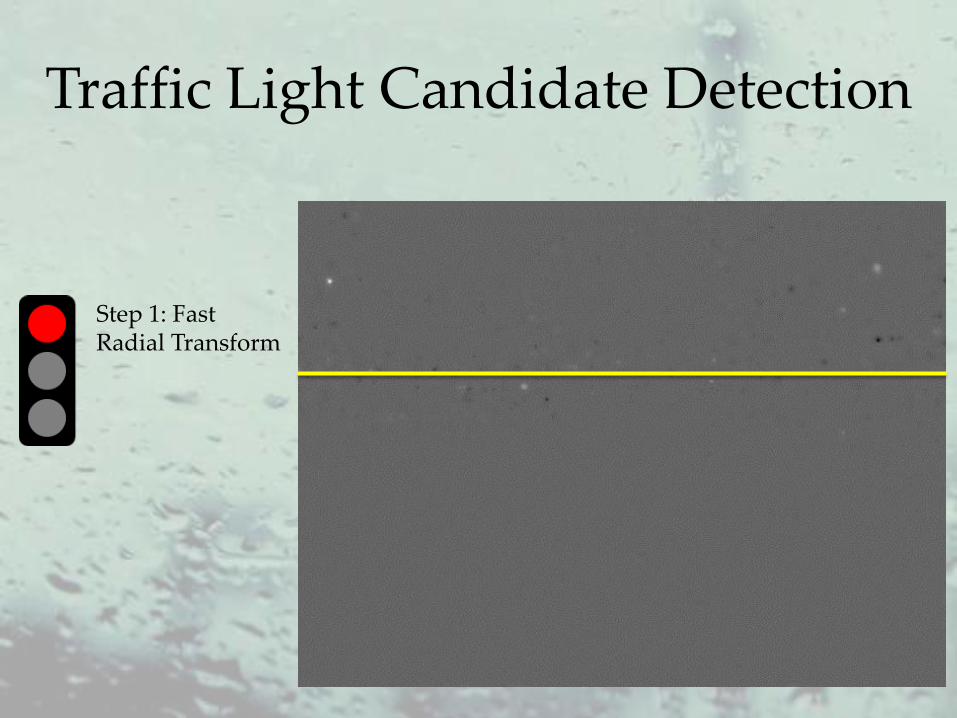
Traffic Light Candidate Detection
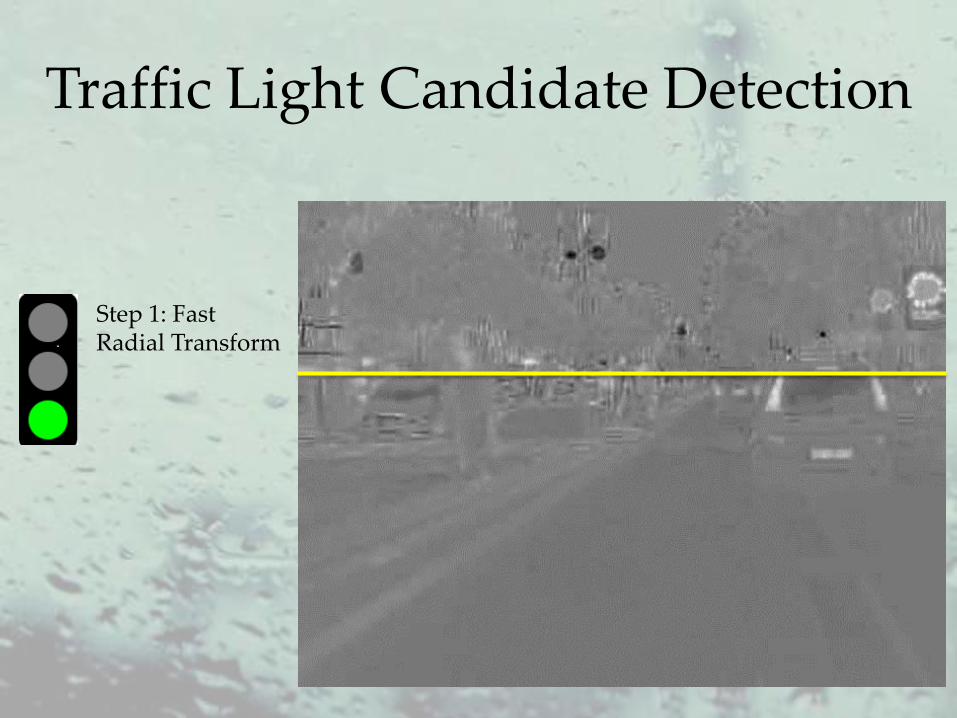
Traffic Light Candidate Detection
Step 1: Fast Radial Transform
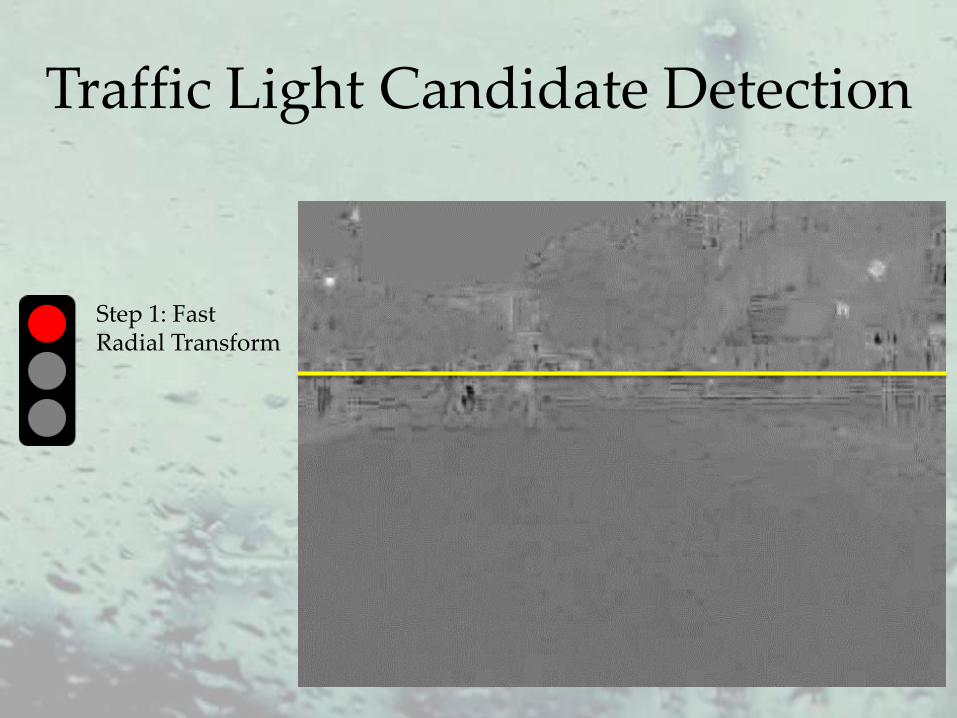
Traffic Light Candidate Detection
Step 1: Fast Radial Transform
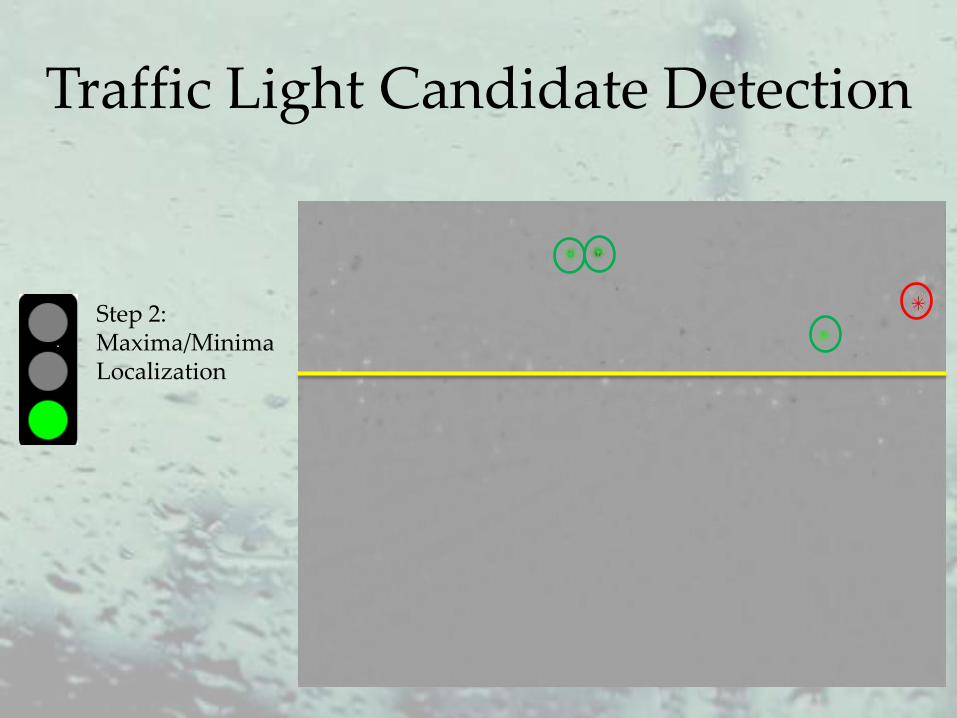
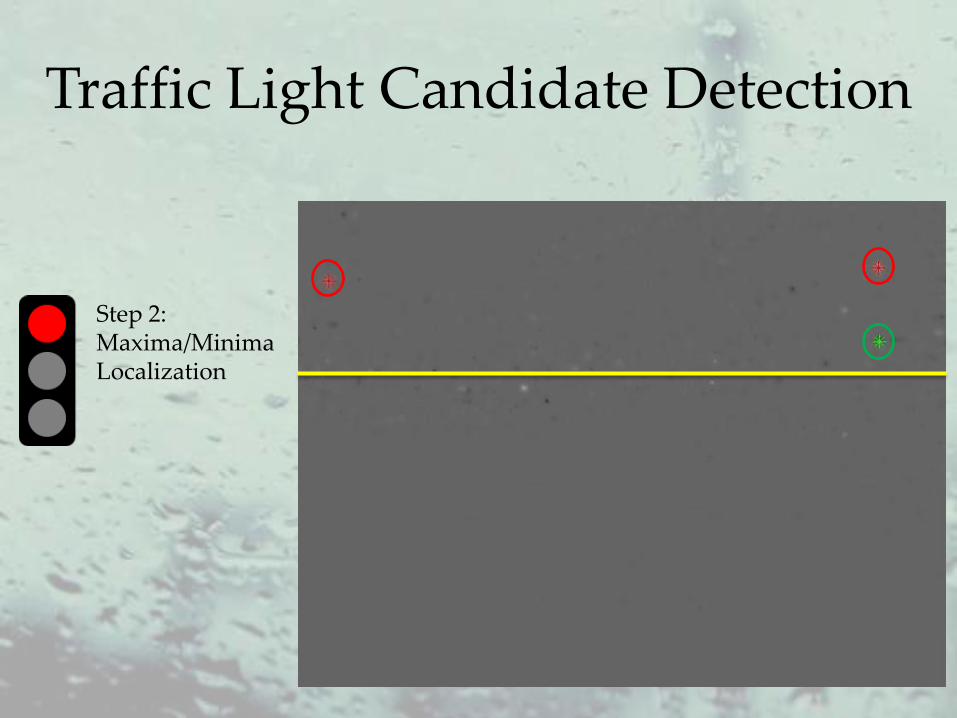
Traffic Light Candidate Detection
Step 2: Maxima/Minima Localization
Traffic Light Candidate Detection
Traffic Light Candidate Detection
Step 1: Fast Radial Transform
Traffic Light Candidate Detection
Step 1: Fast Radial Transform
Traffic Light Candidate Detection
Step 2: Maxima/Minima Localization
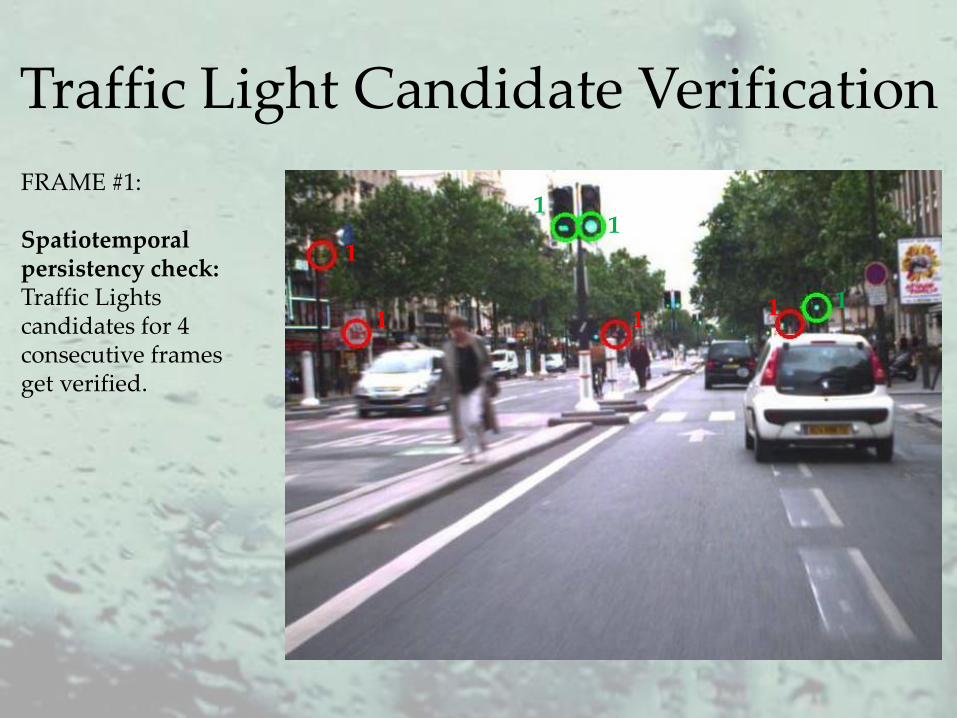
Traffic Light Candidate Verification
FRAME #1: Spatiotemporal persistency check: Traffic Lights candidates for 4 consecutive frames get verified.
1
1 1 1
1 1
1
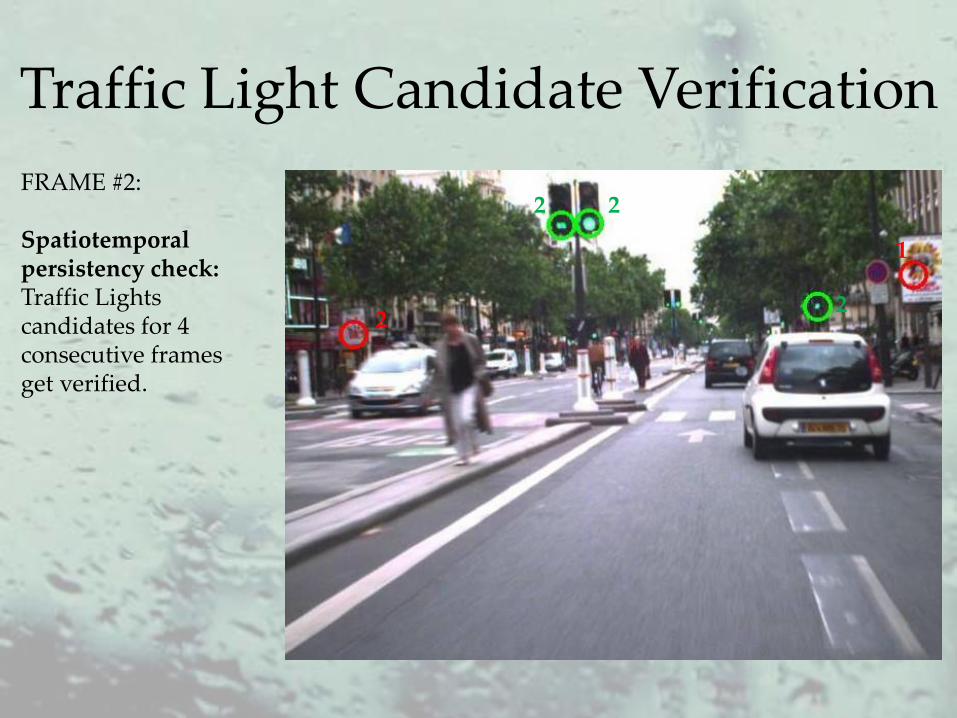
Traffic Light Candidate Verification
FRAME #2: Spatiotemporal persistency check: Traffic Lights candidates for 4 consecutive frames get verified.
2
2 2
2
1

Traffic Light Candidate Verification
FRAME #3: Spatiotemporal persistency check: Traffic Lights candidates for 4 consecutive frames get verified.
1
1 1
2
3
3
1

Traffic Light Candidate Verification
FRAME #4: Spatiotemporal persistency check: Traffic Lights candidates for 4 consecutive frames get verified.
2
2
1 1
2
1
4
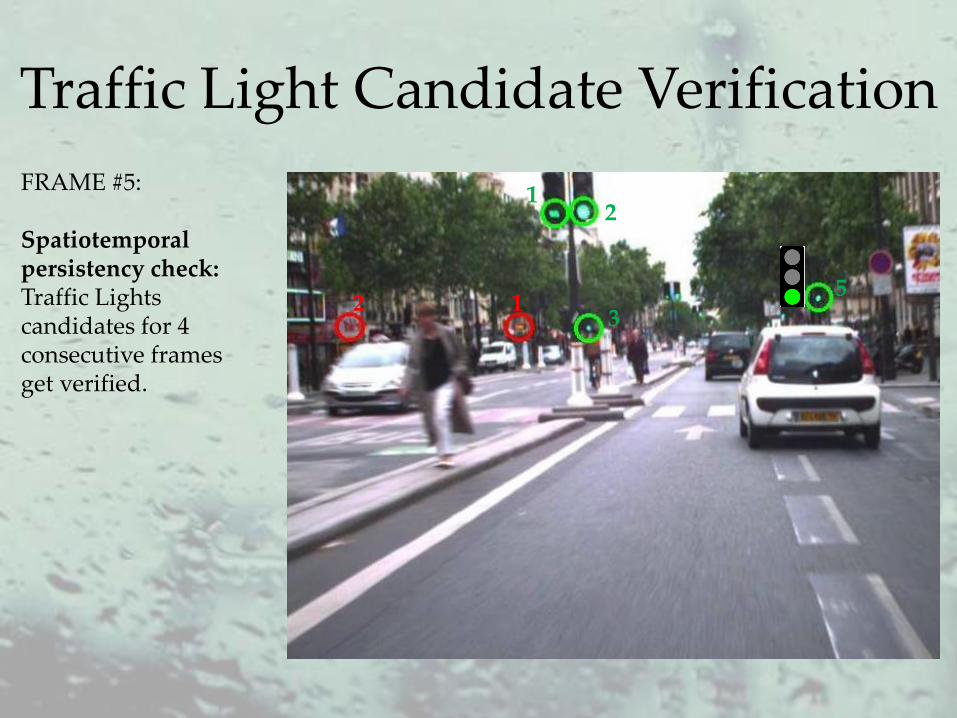
Traffic Light Candidate Verification
FRAME #5: Spatiotemporal persistency check: Traffic Lights candidates for 4 consecutive frames get verified.
3
2 1
5 2 1
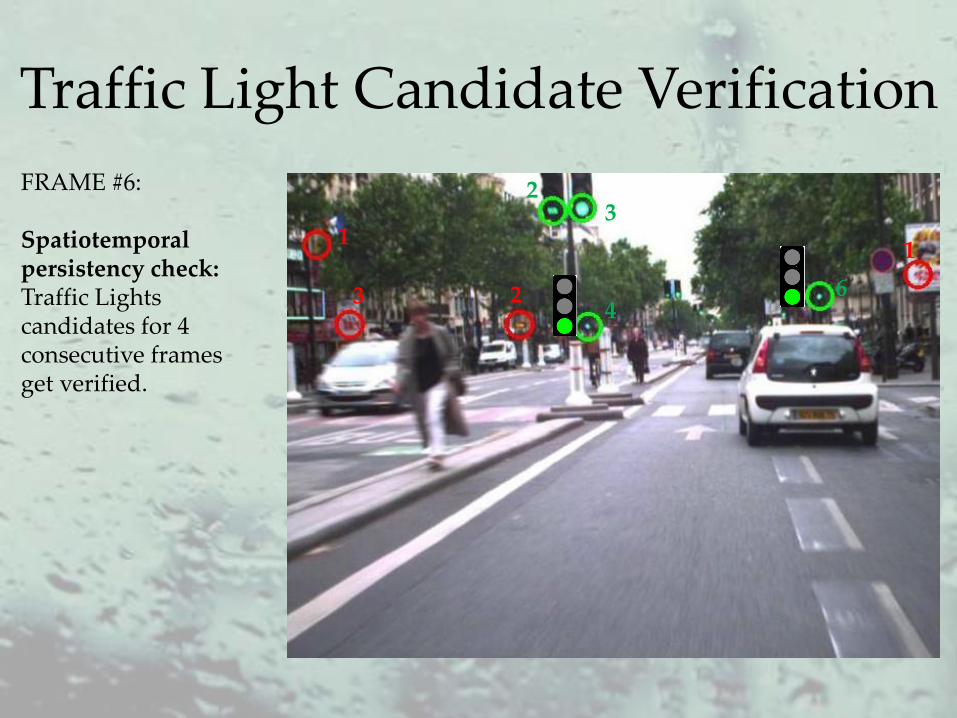
Traffic Light Candidate Verification
FRAME #6: Spatiotemporal persistency check: Traffic Lights candidates for 4 consecutive frames get verified.
2 3
4 6
1
2 3
1
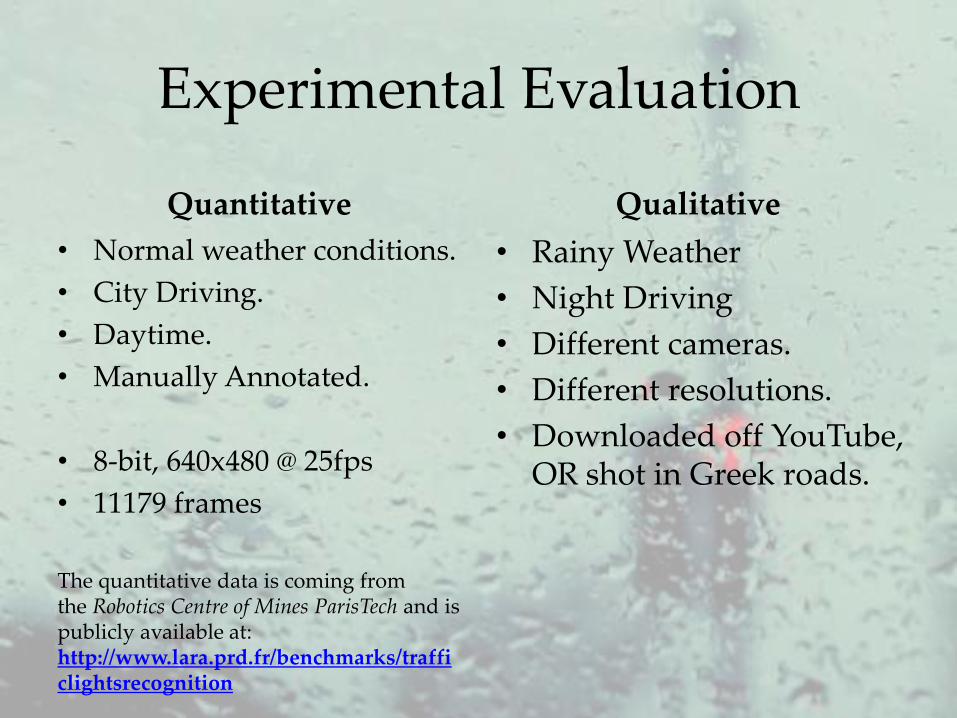
Experimental Evaluation
Quantitative
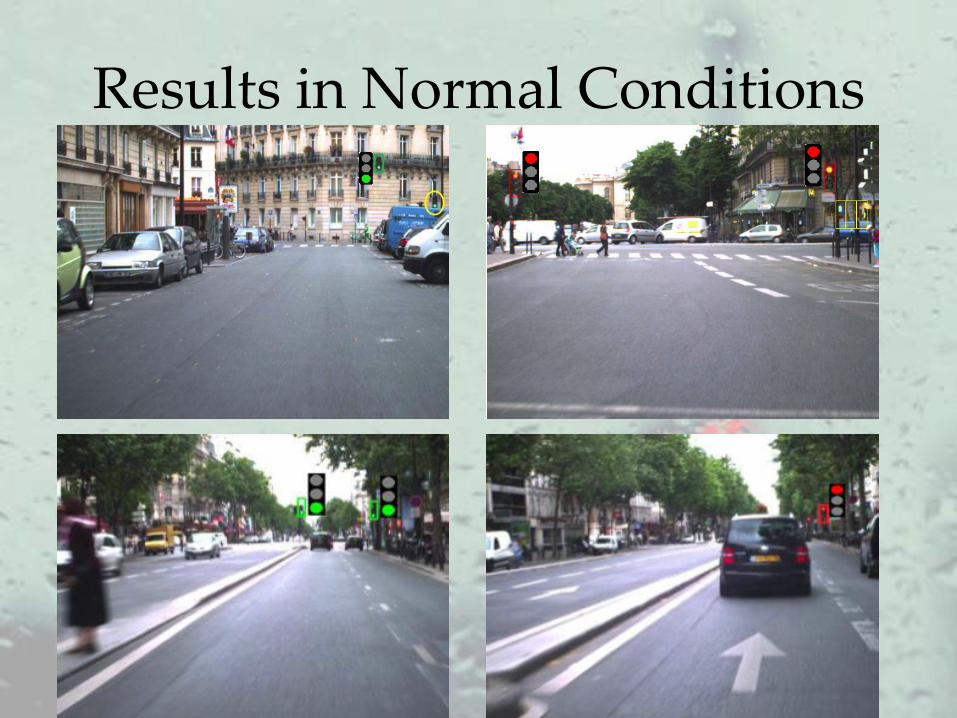
• Normal weather conditions.
• City Driving.
• Daytime.
• Manually Annotated.
• 8-bit, 640x480 @ 25fps
• 11179 frames
The quantitative data is coming from the Robotics Centre of Mines ParisTech and is publicly available at: http://www.lara.prd.fr/benchmarks/trafficlightsrecognition
Qualitative
• Rainy Weather
• Night Driving
• Different cameras.
• Different resolutions.
• Downloaded off YouTube, OR shot in Greek roads.
Results in Normal Conditions
Results in Normal Conditions
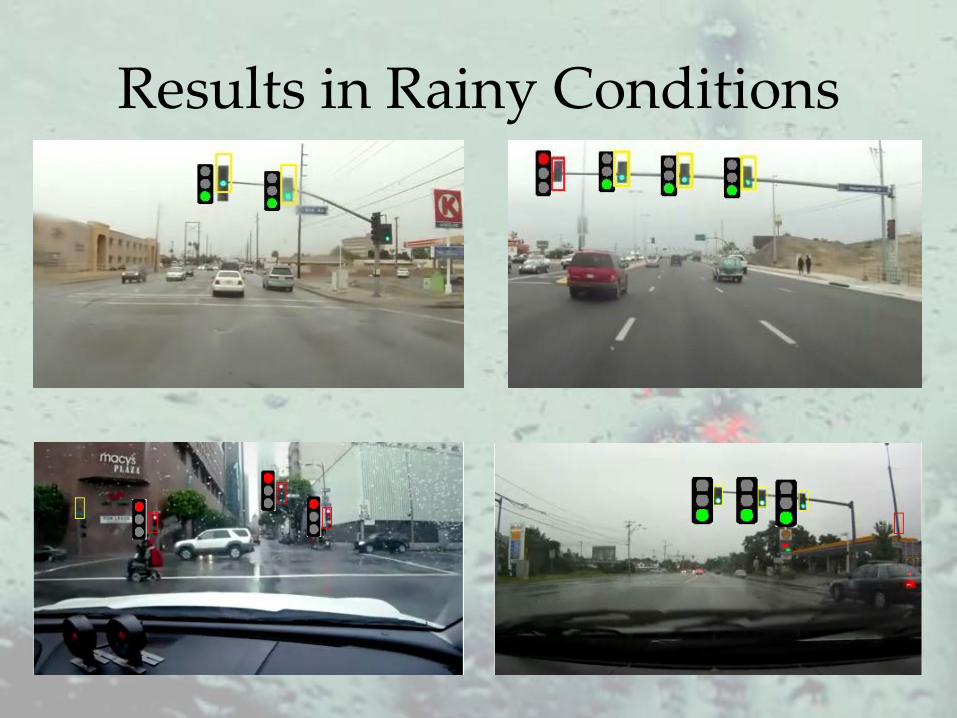
Results in Rainy Conditions
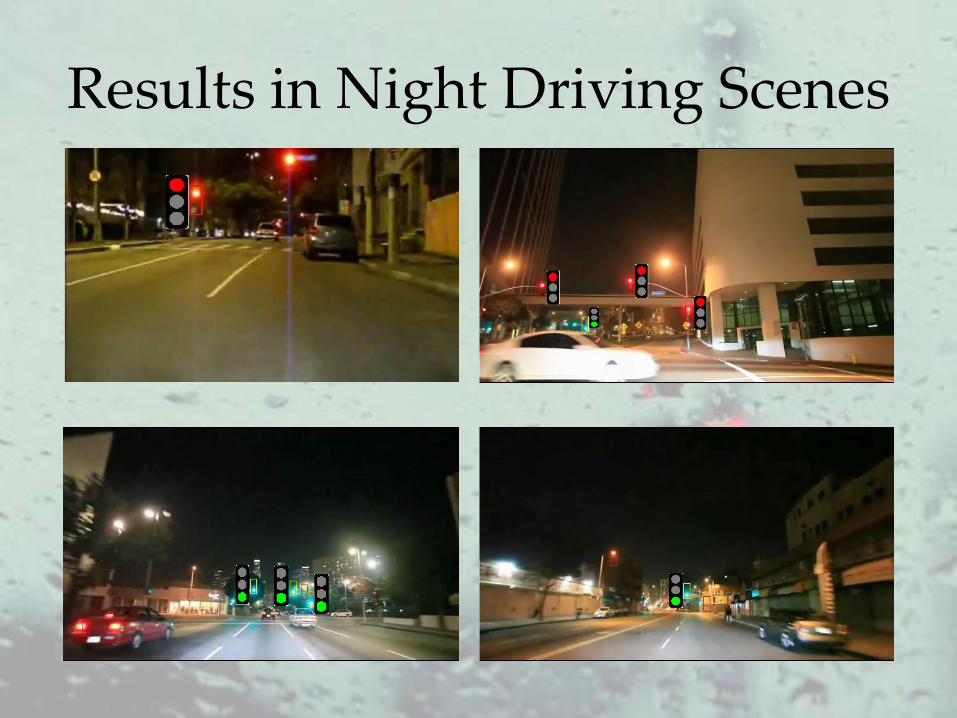
Results in Night Driving Scenes
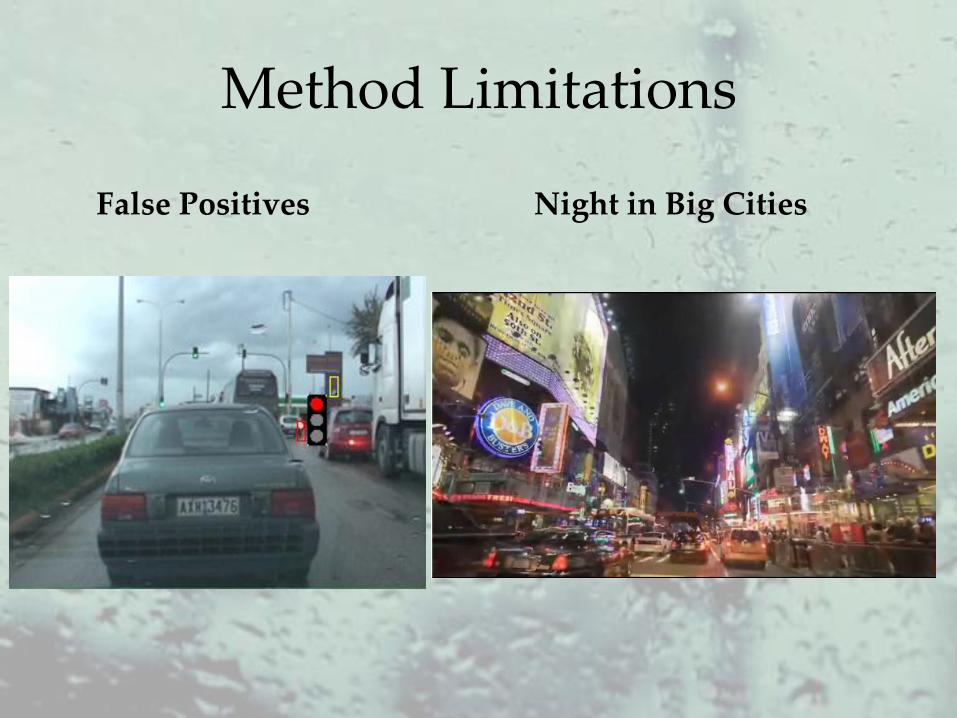
Method Limitations
False Positives Night in Big Cities
Conclusions
• Proposed method shows good results in both normal and adverse conditions.
• Many false alarms, that could be reduced by some kind of structural model.
• Extremely difficult cases cannot be tackled.
• Future work on construction of an annotated database in adverse conditions.
• Also, the incorporation of a tracking module and a color consistency module.
Bibliography
Thank you for your attention.
Questions?









![2017 ICCV Challenge: Detecting Symmetry in the Wildopenaccess.thecvf.com/content_ICCV_2017_workshops/papers/...symmetry [24] are still lagging behind [13, 25]. Our Symmetry Detection](https://img.pdfslide.us/doc/110x75/60ba2521db2bec2604179ed7/2017-iccv-challenge-detecting-symmetry-in-the-symmetry-24-are-still-lagging.jpg)




![Curved Re ection Symmetry Detection with Self-validationvision.cse.psu.edu/publications/pdfs/2010liu2.pdf · Symmetry is pervasive in nature and man-made environments [1,2]. It is](https://img.pdfslide.us/doc/110x75/5f6ffadc4a1e776eb52edc04/curved-re-ection-symmetry-detection-with-self-symmetry-is-pervasive-in-nature-and.jpg)