Embed Size (px)
Citation preview

The Design of a Portable Kit of Wireless Sensors for
Naturalistic Data Collection
Emmanuel Munguia Tapia, Stephen Intille, Louis Lopez, and Kent Larson
House_nMassachusetts Institute of Technology

Long-term goals
In complex, non-laboratory settings suchas real homes…
1. Explore whether some context-recognition detection problems can be robustly solved by using many small, easy-to-install, multi-modal sensors ubiquitously distributed
2. Enable novel context-sensitive applications to be built and piloted

Long-term vision
• End user brings home a box of small, non-intimidating sensors
• End user scatters them around the home without expert help; may wear a few as well
• Context detection algorithms then “learn” to detect useful contexts, and context-aware algorithms do useful things

Long-term vision
Problem: adequate wireless multi-modal sensors for doing pilot research on this problem were not available

Where are we?

Either…
• Single homes laboriously sensorized (e.g. Aware Home, The Neural Network House, MARC)
• Simulated home settings(e.g. The Smart Medical Home UR)
• Real homes wired with a relatively small number of single-mode sensors for short periods of time
Prior home sensing work

Nearly all prior work required either…
• Laborious installation(e.g. complex, multi-point wiring attachments)
• Skilled engineering knowledge to install and maintain the system(e.g. multi-hop wireless nodes, RFID tag placement)
Portable sensors
Because sensors are so difficult toinstall and maintain, those installed inreal homes…
• Are usually of a single type/mode• Are usually tested in single environment• Are usually tested with a single user
Portable sensors

Key usability goals
As described in paper, these goals benefitboth the end user and the researcher:
• Ease of installation• Ease of use• Adequate longitudinal performance in
natural settings• Affordable for research
(with hundreds of sensors in a single environment)
At first, we were reluctant to build another sensing platform…
But none we could obtain met the 4 usability goals.
(A review of prior systems is in the paper…)

Ease of installation
Problems:– Making each node multifunctional and expandable adds
size, weight and complexity to devices
– Dangling antenna facilitates dislodgement
Mica2DOT iMote
Mica2
iMote

Ease of use• Quite often, the use of mesh network
topologies that promise self-configuration and unlimited coverage area result in:– Increased cost– Increased size (including battery) – Increased installation complexity– Increased points of failure in real homes
• Few systems allow for easy integration of high sampling and low sampling and environmental and wearable sensors.

Adequate performance
Evaluation of• Real (not theoretical) battery life• Wireless Tx/Rx ranges• Effects of environmental noise
These parameters have not been clearly reported in the literature for most of the existing sensor platforms, making it hard to predict how they will work in practice in actual homes.

In summary
Researchers who want to deploy largenumbers of multi-modal sensors simultaneously in non-laboratory settingssuch as homes have limited optionsthat are robust and easy to use

MITes (MIT Environmental Sensors)
Goal: collect data from hundreds of multi-modal sensors (environmental and wearable) from single receiver in non-laboratory deployments
• Easy of installation• Ease of use • Adequate performance• Affordable for research• Well characterized/tested

MITes sensor kit includes
Six environmental sensors (low bandwidth)
Five wearable sensors (high bandwidth)
current sensingtemperatureobject-usage-detection
Proximitylightmovement
location beaconsheart rate
ultra-violet radiation exposure
RFID reader wristbandonbody acceleration

nRF24E1
1.33 MIPS MCU + Transceiver
125 Tx/Rx Channels at 2.4GHz
Microstrip
Antenna
ADXL2XX
MEM Accelerometer
24AA320 4K
EEPROM Memory
Crystal
16MHz
MITes Board
Connector for single Digital
sensor

Demonstration
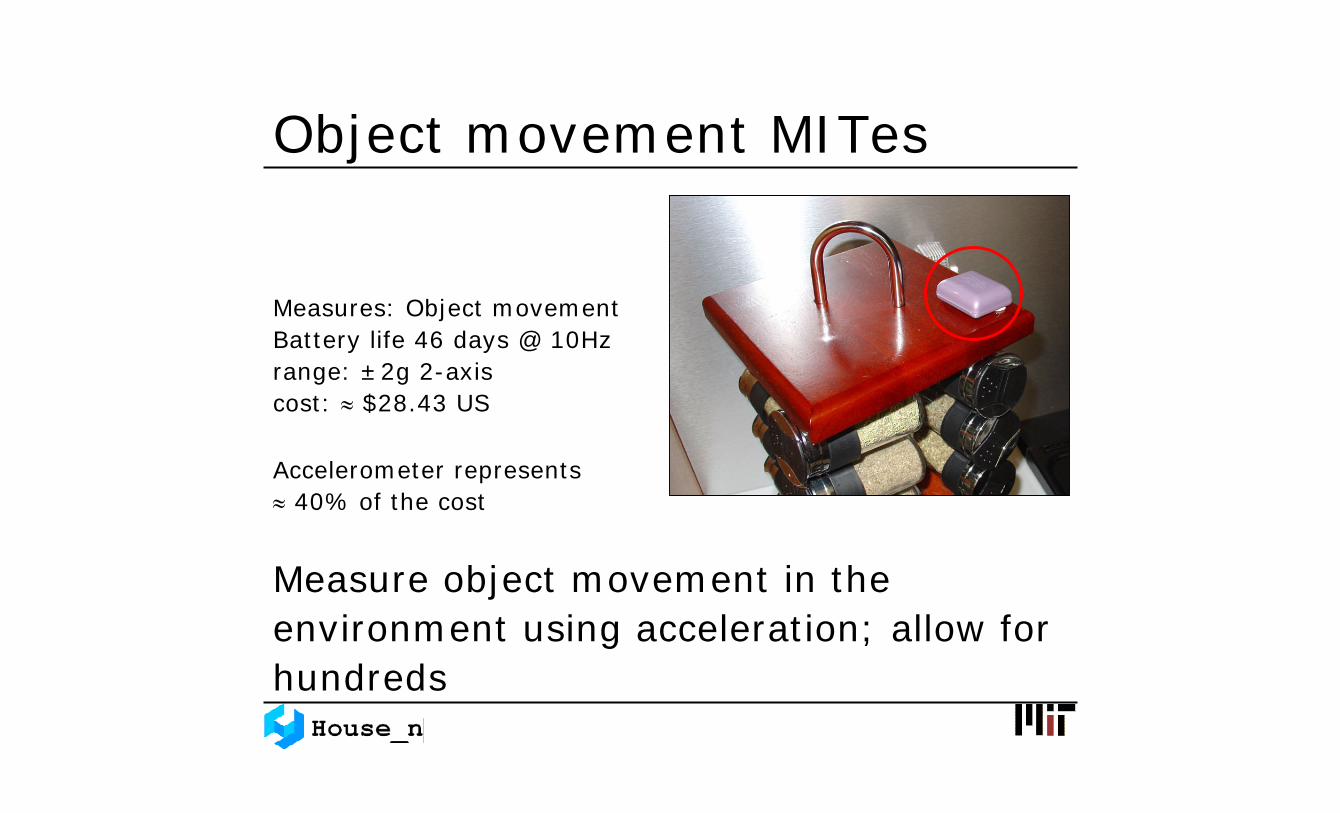
Object movement MITes
Measures: Object movementBattery life 46 days @ 10Hz range: ±2g 2-axis cost: ≈ $28.43 US
Accelerometer represents ≈ 40% of the cost
Measure object movement in theenvironment using acceleration; allow forhundreds

Object usage MITes

Object usage MITes

Light and temperature MITes
Measures: Ambient light intensityBattery life: 14 days @ 1Hz Range: 0.003-1ku W/cm2 Cost: $21.0 US
Measures: TemperatureBattery life: 1309 days @ 1HzRange: –40C to 125C Cost: ≈ $20.3 US
Measure environmental conditionsin an environment

Proximity MITes (MERL)
Measures: Proximity to area (binary output)Battery life 47.5 days @ 2Hz (9V) Range: Circle with 0-2.6m varying radius
(by replacing lid)Cost: ≈ $33.1US
Determine if people underneath

Current flow MITes
Measures: Current consumption in electrical appliancesBattery life 14 days @ 1HzRange: 30mA to 28A Cost: ≈ $75.5 US

Current flow MITes
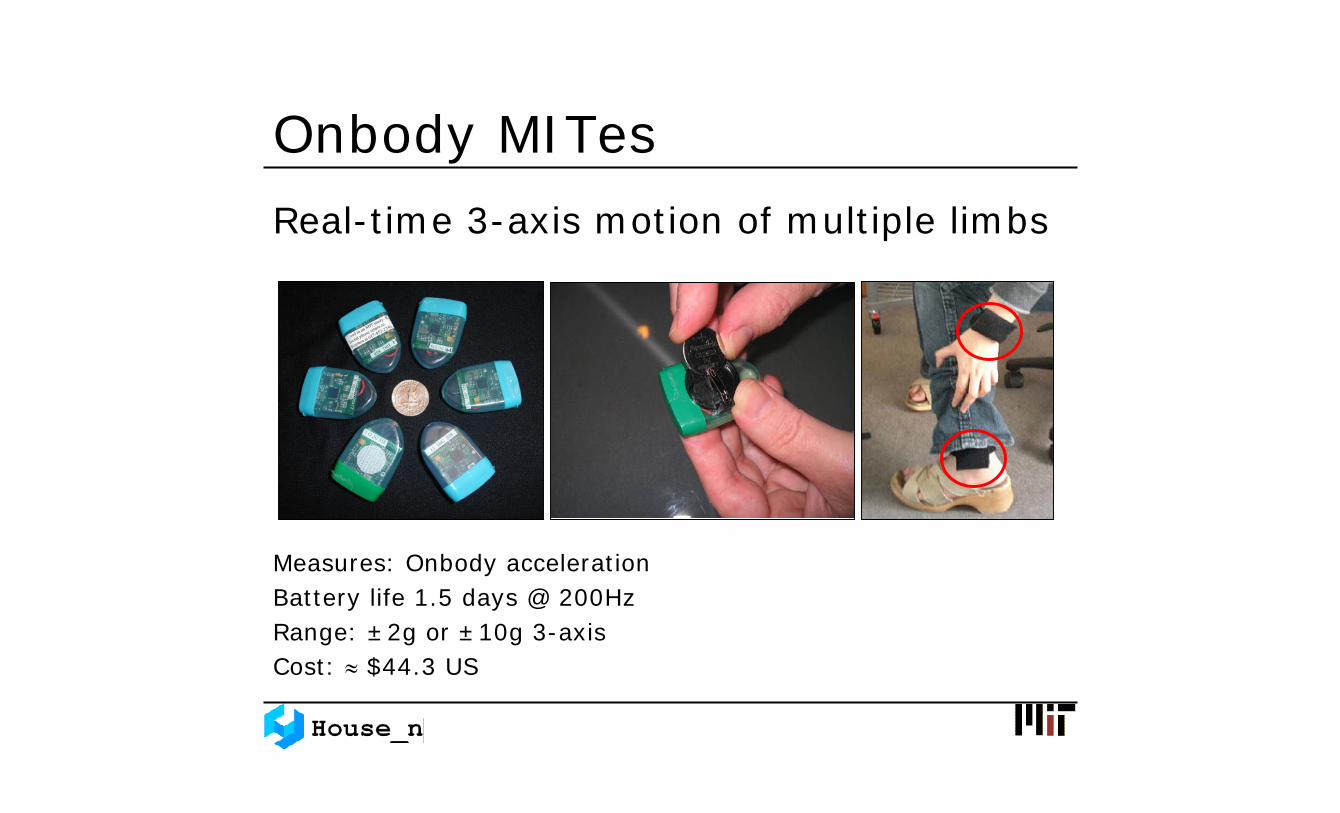
Onbody MITes
Real-time 3-axis motion of multiple limbs
Measures: Onbody accelerationBattery life 1.5 days @ 200HzRange: ±2g or ±10g 3-axis Cost: ≈ $44.3 US

Heart rate MITes Uses industry standard Polar
chest strap
Measures: Beats per minuteBattery life 2.5days @1-255bmpRange: 30-240 bmp Cost: ≈ $95.5 USD

RFID reader wristband
Measures: RFID tagged objects + wrist accelerationBattery life 0.2days @ 5HzRange: 10cm Cost: ≈ $181 US
Based on Intel Research Seattle RFID glove (Perkowitz ETAL ‘04)
Determine motion when holding an object

Location beacon MITes
Measures: Rough location with respect to a receiver nodeBattery life 5days @12HzRange: 2.5, 3.8, 4.8, and 9.4m outdoors, 0.7, 3, 4.5, and 6m indoorsCost: ≈ $48.5 US
Determine proximity to a receiver

Beacon MITes

Ultraviolet light MITes
Measures: Body ultraviolet radiation exposure Battery life 2.58 days @ 1HzRange: 0-28UV Cost: ≈ $93.5 US
Continuously measure exposure to sun

MITes receiver
Single receiverUSB or serialconnector
Serial output

Design decisions
Keep it simple: star network topology
SingleRx
Tx Tx
TxTx
TxTxTx
Tx

SingleRx
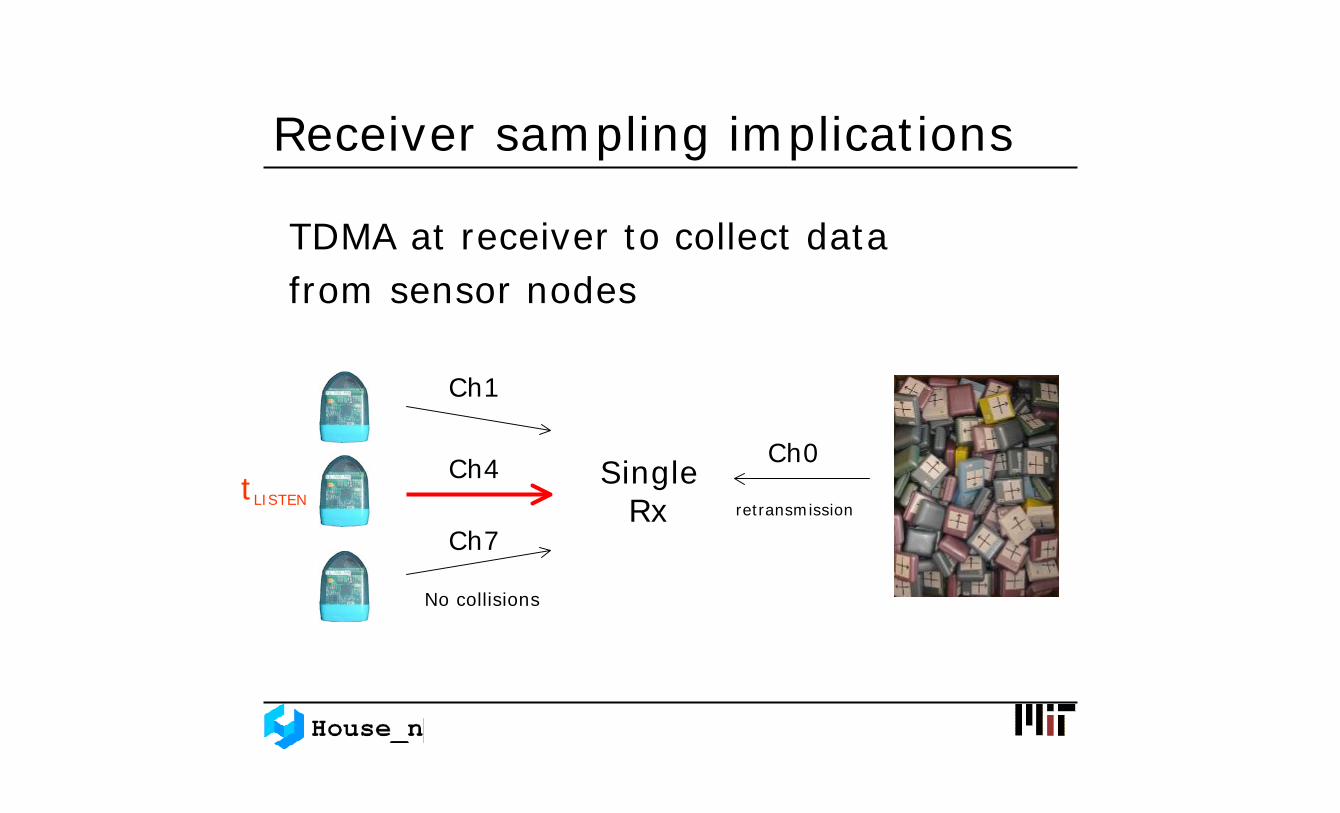
Receiver sampling implications
Ch0
Ch1
Ch4
Ch7retransmission
No collisions
Up to 125 channels (fewer in practice)
TDMA at receiver to collect datafrom sensor nodes

Receiver sampling implications
Ch0
Ch1
Ch4
Ch7retransmission
No collisions
tLISTEN
SingleRx
TDMA at receiver to collect datafrom sensor nodes
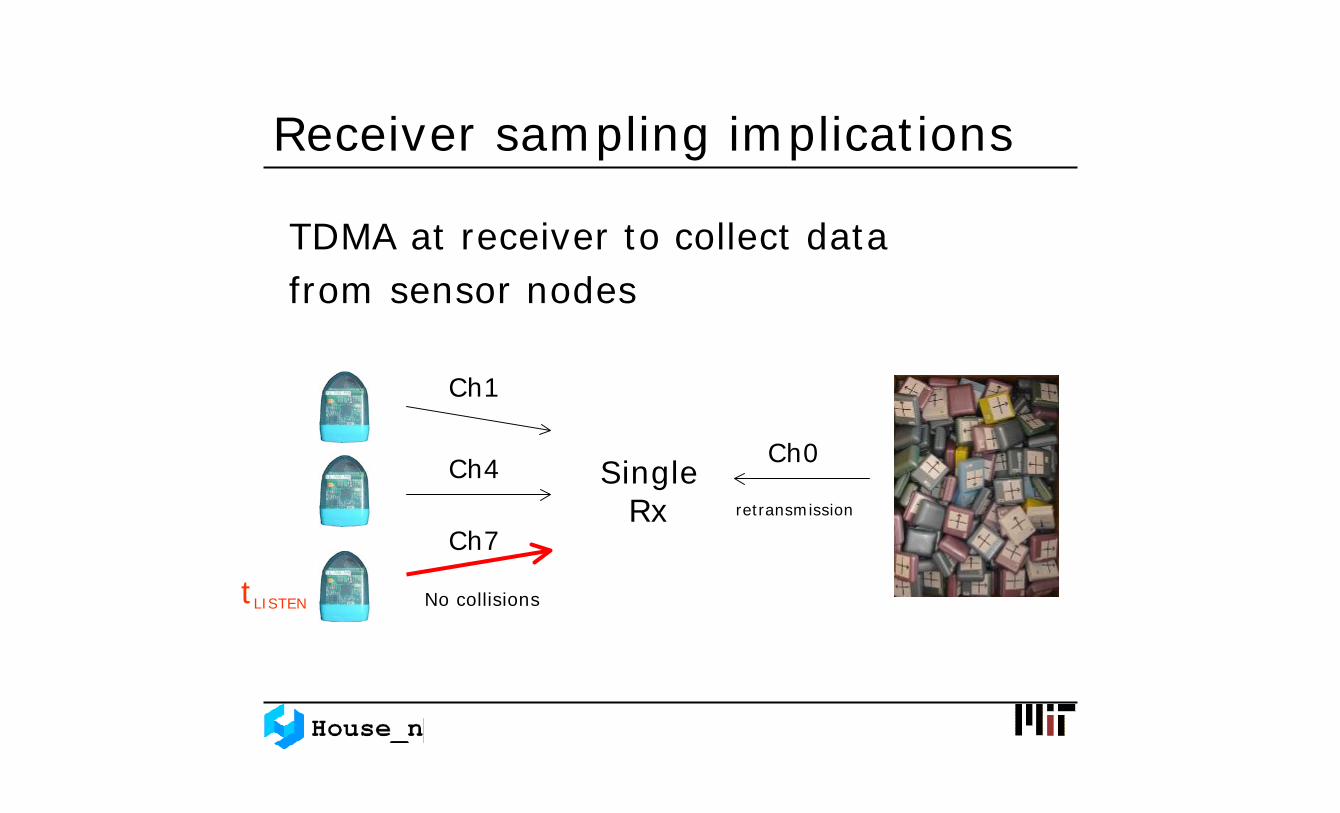
Receiver sampling implications
Ch0
Ch1
Ch4
Ch7retransmission
No collisions
tLISTENSingle
Rx
TDMA at receiver to collect datafrom sensor nodes
Receiver sampling implications
Ch0
Ch1
Ch4
Ch7retransmission
No collisionstLISTEN
SingleRx
TDMA at receiver to collect datafrom sensor nodes

Receiver sampling implications
Ch0
Ch1
Ch4
Ch7
No collisions
tLISTEN
SingleRx
TDMA at receiver to collect datafrom sensor nodes

SingleRx
Low sampling rate nodes
High sampling rate nodes
Design decisions
Keep it simple: featherweight MAC protocol
Allow hundreds of lowsampling nodes
Ch0
Ch1
Ch4
Ch7retransmission
No collisions
(M. Feldmeier and J. A. Paradiso ‘04)

Featherweight appropriate
• Sensor sampling rate is low• Nodes in star topology• Data flow unidirectional (sensors to Rx)• Propagation delays (ms) are tolerable• Sporadic loss of data from single sensor
usually ok (due to sensor density)
Appropriate for activity recognition!

Featherweight advantages
• Cost savings– No receiver, carrier detection circuit or
precision clock needed on sensors
• Energy savings– No time spent listening for control packets
of forwarding data on sensors
• Fast network setup– No network parameter tuning
• Simple implementation– Adds robustness

Disadvantages of approach
• Due to TDMA:– List of channels needs to be specified
beforehand for high SR sensors– The more high SR sensors there are, the
lower the effective SR for each(6 accelerometers at 180Hz; SR = 180/6 = 30Hz)
• Due to Featherweight retransmission:– Possible loss of data due to collisions during
high activity periods

Advantages of approach
Collecting data from real homes with
• Hundreds of low sampling rate sensors attached to objects
• Different types of low SR sensors • Many (e.g. six high SR sensors)• Good battery life for high and low SR
sensors
(All at an affordable cost for research)

Possible sources of error
• Channel impairments due to environmental noise, shadowing, fading, reflection, refractions, obstacles, etc.
• Collisions due to simultaneous transmission of multiple sensors

Collisions in object movement MITes
• In practice, probably rare in real homes(in our prior work with switch sensors on objects in homes, out of 10,458 activations, only 1.2% were within 2s)
• Still, a concern when simultaneously manipulating several objects(e.g. opening a drawer with many objects inside)

Collisions in object movement MITes
Collision noise can be overcome withretransmission
In practice, retransmission quite good
8870
9560 (PRx=40)10030
Theoretical PRx(%)Six retransmissions
Assuming Ploss(%) one transmission
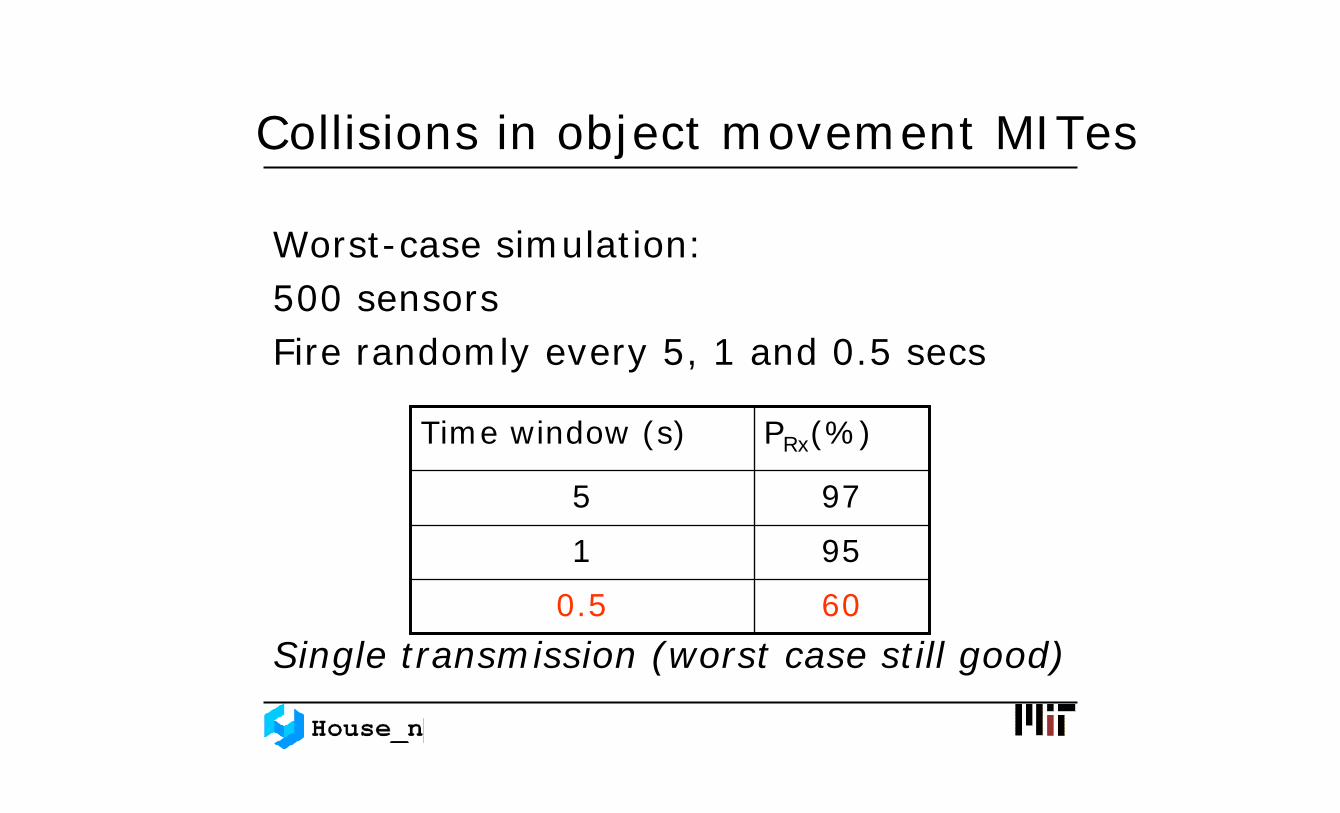
Worst-case simulation: 500 sensorsFire randomly every 5, 1 and 0.5 secs
Single transmission (worst case still good)600.5
951
975
PRx(%)Time window (s)
Collisions in object movement MITes

MITes performance in real settings

Wireless Tx/Rx range outdoors
Rx =?distance
Tx =180 packets
Parallel orientation
Rx =?distance
Tx =180 packets
Random disposition

Wireless Tx/Rx range outdoors
0 50 100 1500
20
40
60
80
100Tx/Rx Range outdoors LOS antennas parallel
Distance in meters
Per
cent
age
of p
acke
ts re
ceiv
ed
GigantMITesLinxYageo
20 40 60 80 100 1200
20
40
60
80
Tx/Rx Range LOS antennas in random disposition
Distance in meters
Per
cent
age
of p
acke
ts re
ceiv
ed GigantMITesLinxYageo
38.1 mRandom disposition
106.6 mParallel orientation
MITes microstrip ($0.01)
Tx/Rx range measured at distance where PRX=90%

Wireless Tx/Rx range indoorsTested in thePlaceLab
• A 16.5x5.2m living laboratory condominium with interior walls constructed from steel frame and drywall.
• The environment has several kilometers of digital and electrical wiring

Wireless Tx/Rx range indoors
Floorplan view
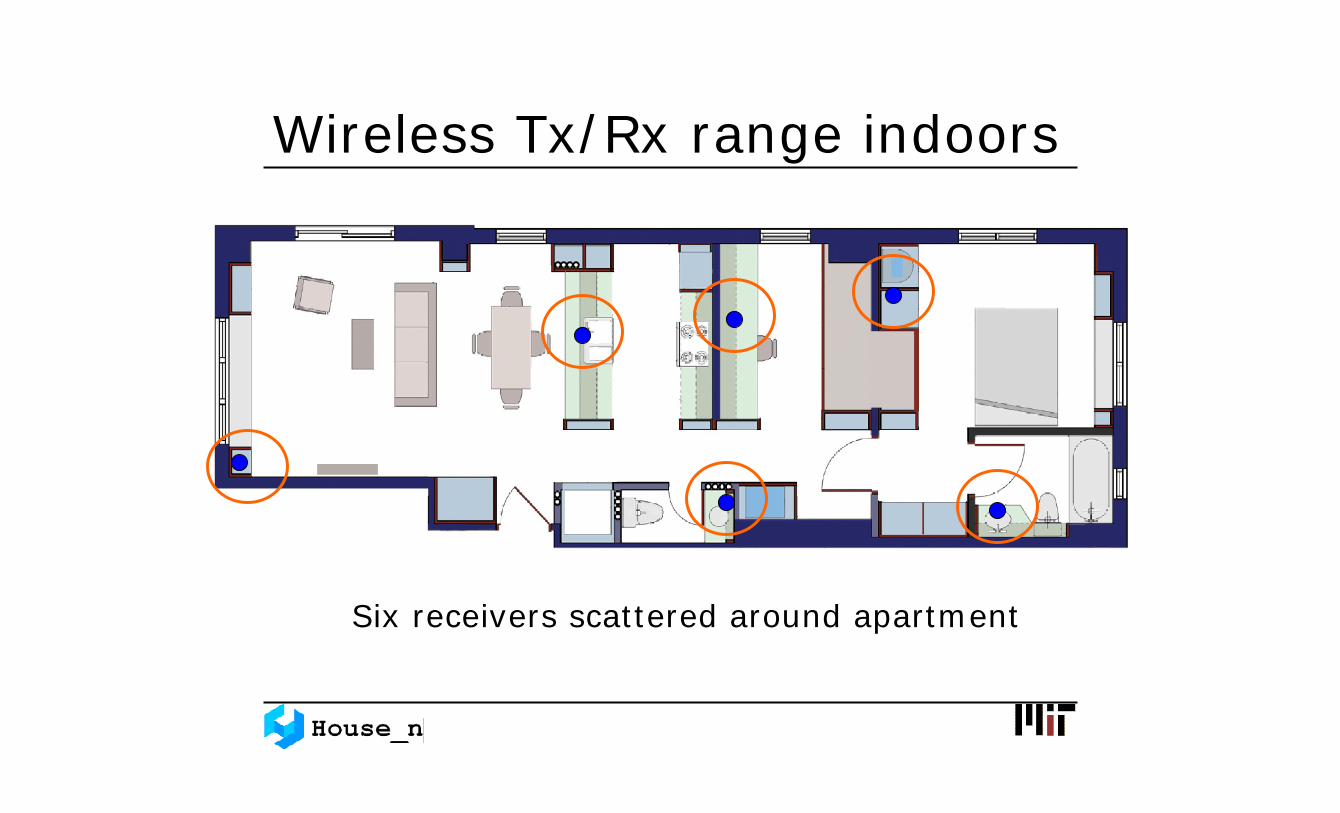
Wireless Tx/Rx range indoors
Six receivers scattered around apartment

Wireless Tx/Rx range indoors
31 Tx sensor nodes installed at worse case locations throughout the apartment
(1) random orientation and (2) random distance from the floor
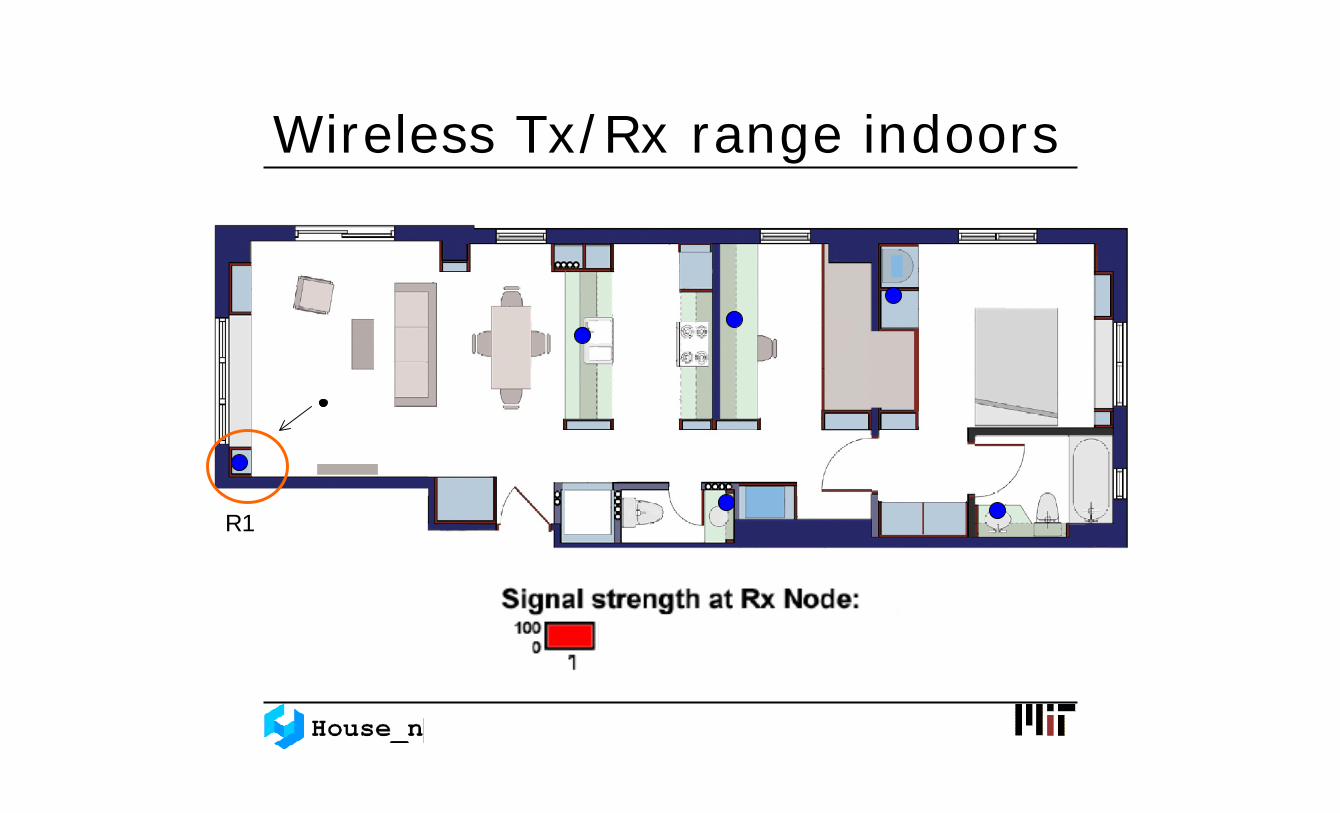
Wireless Tx/Rx range indoors
R1

Wireless Tx/Rx range indoors
R2

Wireless Tx/Rx range indoors
R3

Wireless Tx/Rx range indoors
R4

Wireless Tx/Rx range indoors
R5

Wireless Tx/Rx range indoors
R6
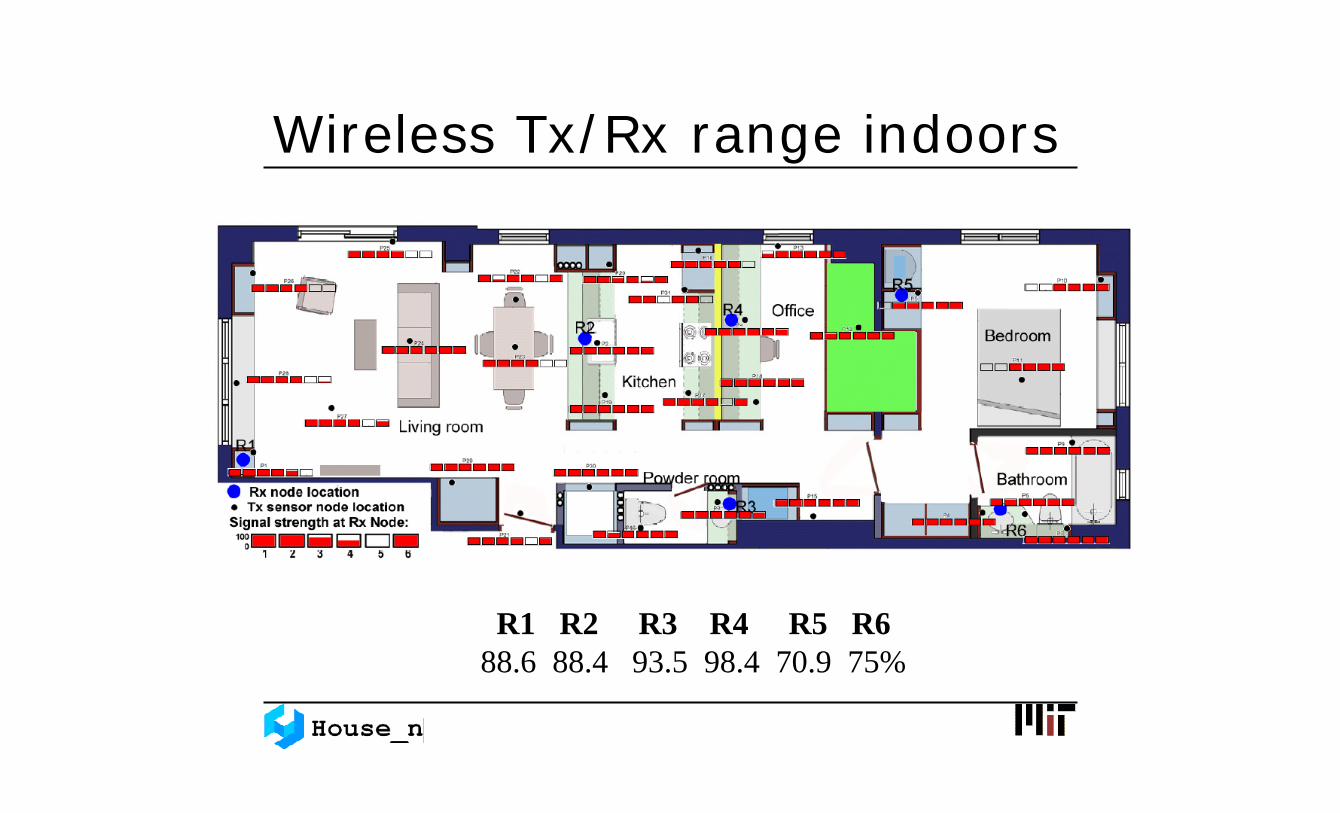
Wireless Tx/Rx range indoors
R1 R2 R3 R4 R5 R688.6 88.4 93.5 98.4 70.9 75%

Wireless Tx/Rx range indoors
R1 R2 R3 R4 R5 R688.6 88.4 93.5 98.4 70.9 75%
Mean each receiver:

Impact environmental noise
• % packets lost at the PlaceLab when WLAN was on and the following devices were turned on
– Vacuum cleaner: 3.7% drop– Microwave: 4.3% drop– Cordless 2.4GHz telephone: 1.2% drop– WLAN vs. no WLAN: 0.006% drop
MITes installation time
• Across two subjects installing 175 sensors total, measured an average installation time of only 36 seconds per sensor

Take away
• Simple strategy (TDMA + featherweight MAC) performs well in a real environment
• Simplicity of design contributes to robust performance, low price point, and ease of use
• Getting the devices to work as a demonstration in the lab was substantially easier than getting them to work in practice in uncontrolled conditions in a real home; in situ testing was critical to development
Thank you!
• MITes hardware and softwarespecifications are available online– http://architecture.mit.edu/house_n/MITes
• Questions? Contact:
– Emmanuel Munguia Tapia [email protected]
– Stephen [email protected]