Embed Size (px)
Citation preview
Technical Report Documentation Page 1. Report No. SWUTC/02/167403-1
2. Government Accession No.
3. Recipient's Catalog No. 5. Report Date March 2002
4. Title and Subtitle Sustainable Transportation: Conceptualization and Performance Measures 6. Performing Organization Code
7. Author(s) Josias Zietsman and Laurence R. Rilett
8. Performing Organization Report No. Report 167403 10. Work Unit No. (TRAIS)
9. Performing Organization Name and Address Texas Transportation Institute The Texas A&M University System College Station, Texas 77843-3135
11. Contract or Grant No. 10727 13. Type of Report and Period Covered
12. Sponsoring Agency Name and Address Southwest Region University Transportation Center Texas Transportation Institute The Texas A&M University System College Station, Texas 77843-3135
14. Sponsoring Agency Code
15. Supplementary Notes Supported by general revenues from the State of Texas 16. Abstract Sustainable transportation attempts to address economic development, environmental stewardship, and social equity of current and future generations. While numerous qualitative studies have been performed on this topic, there has been little quantitative research and/or implementation of sustainable transportation concepts. The main reasons for this are related to a lack of understanding of sustainable transportation and a lack of quantified performance measures. To address this problem, a comprehensive definition for sustainable transportation was developed, as well as a framework on how to identify, quantify, and use performance measures for sustainable transportation in the transportation planning process. The proposed framework was applied to a test bed, comprising two freeway corridors in Houston, Texas. New innovations such as Automatic Vehicle Identification (AVI) data and the Transportation Analysis and Simulation System (TRANSIMS) model make it possible to obtain travel-related information at highly disaggregate levels. This information can be used to quantify sustainable transportation performance measures at the individual level and levels of spatial and temporal disaggregation, which has previously not been possible. The AVI data, the TRANSIMS model, and a number of transportation environmental impact models were used to quantify the performance measures at various levels of aggregation. The performance measures that were quantified on disaggregate levels were compared to measures that were quantified with traditional aggregate data sets. It was found that the traditional approach is much less accurate due to a loss of detail and the effect of aggregation bias. It was illustrated that the performance measures based on disaggregate data can potentially provide different results as compared to aggregate approaches, when used with multi-objective decision-making techniques in transportation planning. Finally, it was demonstrated that the disaggregate approach can be used to allocate responsibility for negative externalities, and to assess the sustainability as experienced by different user groups. 17. Key Words Sustainable Transportation, Performance Measures, Disaggregate, Decision-Making, TRANSIMS, AVI Data
18. Distribution Statement No restrictions. This document is available to the public through NTIS: National Technical Information Service 5285 Port Royal Road Springfield, Virginia 22161
19. Security Classif.(of this report) Unclassified
20. Security Classif.(of this page) Unclassified
21. No. of Pages 163
22. Price
Form DOT F 1700.7 (8-72) Reproduction of completed page authorized


SUSTAINABLE TRANSPORTATION: CONCEPTUALIZATION AND
PERFORMANCE MEASURES
By
Josias Zietsman Associate Research Scientist Texas Transportation Institute
and
Laurence R. Rilett Associate Professor
Texas A&M University
Research Report SWUTC/02/167403-1
Southwest Region University Transportation Center Center for Transportation Research University of Texas at Austin
Austin, TX 78712
March 2002

iii
DISCLAIMER
The contents of this report reflect the views of the authors, who are responsible for
the facts and accuracy of the information presented herein. The document is disseminated
under the sponsorship of the Texas Department of Transportation, University
Transportation Centers Program, in the interest of information exchange. Mention of
trade names or commercial products does not constitute endorsement or recommendation
for use.
ACKNOWLEDGEMENT
The authors recognize that support for this research was provided by a grant from the
U.S. Department of Transportation, University Transportation Centers Program to the
Southwest Region University Transportation Center which is funded 50% with general
revenue funds from the State of Texas.

v
ABSTRACT
Sustainable transportation attempts to address economic development, environmental
stewardship, and social equity of current and future generations. While numerous
qualitative studies have been performed on this topic, there has been little quantitative
research and/or implementation of sustainable transportation concepts. The main reasons
for this are related to a lack of understanding of sustainable transportation and a lack of
quantified performance measures. To address this problem, a comprehensive definition
for sustainable transportation was developed, as well as a framework on how to identify,
quantify, and use performance measures for sustainable transportation in the
transportation planning process. The proposed framework was applied to a test bed,
comprising two freeway corridors in Houston, Texas.
New innovations such as Automatic Vehicle Identification (AVI) data and the
Transportation Analysis and Simulation System (TRANSIMS) model make it possible to
obtain travel-related information at highly disaggregate levels. This information can be
used to quantify sustainable transportation performance measures at the individual level
and levels of spatial and temporal disaggregation, which has previously not been
possible. The AVI data, the TRANSIMS model, and a number of transportation
environmental impact models were used to quantify the performance measures at various
levels of aggregation.
The performance measures that were quantified on disaggregate levels were
compared to measures that were quantified with traditional aggregate data sets. It was
found that the traditional approach is much less accurate due to a loss of detail and the
effect of aggregation bias. It was illustrated that the performance measures based on
disaggregate data can potentially provide different results as compared to aggregate
approaches, when used with multi-objective decision-making techniques in transportation
planning. Finally, it was demonstrated that the disaggregate approach can be used to
allocate responsibility for negative externalities, and to assess the sustainability as
experienced by different user groups.
vii
EXECUTIVE SUMMARY
Transportation is an essential social and economic activity that also results in a
number of negative externalities. The concept of sustainable transportation was
developed to ensure that despite the negative externalities associated with transportation,
the needs of present and future generations can be met. Sustainable transportation can be
viewed as an expression of sustainable development in the transportation sector, and for
this research sustainable development can be defined as follows: sustainable development
is development that ensures intergenerational equity by simultaneously addressing the
multi-dimensional components of economic development, environmental stewardship,
and social equity. It is a dynamic process, which considers the changing needs of society
over space and time. Sustainable development can be viewed as a continuum,
representing various degrees of sustainability. It must, however, be achieved within
resource, environmental, and ecological constraints.
While numerous qualitative studies have been performed on this topic there has been
little quantitative research and/or implementation of sustainable transportation concepts.
Inadequate transportation planning practice is mostly blamed for the poor implementation
record of sustainable transportation. Specific deficiencies include a lack of understanding
and appreciation for sustainable transportation, as well as a lack of quantified measures to
monitor progress and to assist with decision-making. The state of the practice for
quantifying performance measures from both observed and modeled data is based on
aggregate models. Important shortcomings of this approach are the inaccuracies due to a
loss in detail and the effect of aggregation bias. The latest state of the art in transportation
modeling and data collection techniques, however, make it possible to quantify
performance measures at the individual level, as well as a wide range of levels of spatial
and/or temporal aggregation.
The first challenge for implementing the concepts of sustainable transportation,
therefore, is to define sustainable transportation and to provide a framework on how to
identify, quantify, and apply performance measures for sustainable transportation. The
second challenge is to use the latest state-of-the-art technologies in transportation
simulation modeling and data collection techniques to quantify performance measures at
viii
a disaggregate level as compared to the traditional aggregate level. The third and final
challenge is to illustrate how the quantified sustainable transportation performance
measures can be used in the decision-making process related to transportation planning.
The scope of the research was such that the methodologies developed are of a generic
nature that can be applied at both the local and network-wide levels, as well as for a wide
range of sustainable transportation performance measures. The applications, however,
focused on mobility and environmental related performance measures for freeway
corridors. A twenty-two-kilometer section of the Interstate 10 (I-10) corridor and a
twenty-one-kilometer section of the US-290 corridor in Houston, Texas, were selected as
test beds for this research.
Researchers addressed the first challenge by developing a definition for sustainable
transportation, as shown above, and to develop a framework on how to identify, quantify,
and use performance measures for sustainable transportation in the transportation
planning process. The framework is comprised of the following five phases that are inter-
linked to ensure adequate feedback and information flow:
• Identifying performance measures;
• Database development;
• Quantifying performance measures;
• Decision-making; and
• Implementation.
The second challenge was addressed by identifying and quantifying a broad range of
sustainable transportation performance measures. These measures were quantified at the
individual level, as well as various levels of aggregation, by making use of Automatic
Vehicle Identification (AVI) data, the TRANSIMS model, and a number of transportation
environmental impact models. Comparisons were made between the results as obtained at
the various levels of aggregation. It was shown that considerable errors could be
encountered when performance measures for sustainable transportation were quantified at
the traditional aggregate levels. Appropriate levels of aggregation were identified that can
ix
achieve accurate results and at the same time be efficient in terms of computing speed
and memory allocations.
The research illustrated how disaggregate travel information can be obtained and used
to improve the way in which performance measures for sustainable transportation are
quantified. The following are some of the individual contributions of the research:
sustainable transportation is defined and a framework is proposed for identifying,
quantifying, and using performance measures in the decision-making process; the
shortcomings of the current aggregate-based practice and the benefits of the proposed
methodology for quantifying performance measures for sustainable transportation at a
disaggregate level are demonstrated; and a methodology for using performance measures
for sustainable transportation in the decision-making process is proposed.
xi
TABLE OF CONTENTS CHAPTER 1: INTRODUCTION ....................................................................................1 Background....................................................................................................................1 Statement of the Problem ..............................................................................................5 Research Objectives ......................................................................................................6 Contribution of the Research.........................................................................................7 Organization of the Report ............................................................................................8 CHAPTER 2: LITERATURE REVIEW ........................................................................9 Sustainable Transportation ............................................................................................9 Legislative, Planning, and Policy Frameworks ...........................................................14 Performance Measures ................................................................................................20 Modeling Techniques ..................................................................................................28 Concluding Remarks ...................................................................................................35 CHAPTER 3: A FRAMEWORK FOR ACHIEVING SUSTAINABLE TRANSPORTATION .....................................................................................................39 Defining Sustainable Transportation ...........................................................................39 Decision-Making Process for Sustainable Transportation ..........................................42 Concluding Remarks ...................................................................................................50 CHAPTER 4: TRAVEL TIME ANALYSIS FROM ITS DATA................................53 Description of the Test Bed .........................................................................................53 Candidate Performance Measures ...............................................................................54 Description of the AVI Data........................................................................................56 Identification of the Regular Commuters ....................................................................58 Travel Time Estimation ...............................................................................................59 Estimation of Travel Time Variability ........................................................................67 Link-Based Comparison ..............................................................................................72 Concluding Remarks ...................................................................................................75 CHAPTER 5: MOBILITY RELATED PERFORMANCE MEASURES .................77 Methods of Disaggregation .........................................................................................77 Smoothing of Simulated Speed Profiles......................................................................80 Qunatifying Mobility-Related Performance Measures................................................81 Concluding Remarks ...................................................................................................89 CHAPTER 6: ENVIRONMENTAL RELATED PERFORMANCE MEASURES..91 Air Pollution ................................................................................................................91 Noise Pollution ..........................................................................................................106 Fuel Consumption......................................................................................................109 Concluding Remarks .................................................................................................113
xii
CHAPTER 7: APPLICATIONS OF PERFORMANCE MEASURES....................117 Making Decisions in the Context of Sustainable Transportation ..............................117 Allocating Responsibility for Negative Externalities................................................124 Concluding Remarks .................................................................................................133 CHAPTER 8: CONCLUSIONS AND FUTURE RESEARCH.................................135 Conclusions ...............................................................................................................135 Future Research .........................................................................................................137 CHAPTER 9: REFERENCES .....................................................................................141

xiii
LIST OF FIGURES
Figure Page
2.1 Interaction of the World Economy with the Global Ecological System ...............13 2.2 Old and New Paradigms for Performance Measures.............................................25 2.3 Basic Modules within TRANSIMS.......................................................................32 3.1 Illustration of the Definition of Sustainability.......................................................41 3.2 The Dimensions of Sustainable Transportation.....................................................42 3.3 Framework for Identifying, Quantifying and using Performance Measures.........43 3.4 Phase 1: Identifying Performance Measures .........................................................46 3.5 Phase 2: Database Development............................................................................47 3.6 Phase 3: Quantifying Performance Measures........................................................48 3.7 Phase 4: Decision-Making Framework .................................................................49 3.8 Phase5: Implementation Framework .....................................................................50 4.1 Location Map of the Freeway System in the Houston Area..................................54 4.2 Relationship of Frequency of Commuting and Number of Observations .............59 4.3 AAD Corridor Travel Times Calculated with the Link-Based and Corridor-Based Approaches ..................................................................................62 4.4 Mean Travel Times of Regular Commuters and Aggregate Estimates .................64 4.5 Individual Travel Times and Aggregate Estimates Based on the
AAD Approach......................................................................................................65 4.6 Individual Travel Times and Aggregate Estimates Based on the
ABD Approach ......................................................................................................66 4.7 Corridor versus Link-Based Travel Time Standard Deviations ............................69 4.8 Standard Deviation of Travel Time versus Standard Deviation of Entering Time.......................................................................................................................70 4.9 Individual and Aggregate Estimates of Travel Time Standard Deviations ...........71 4.10 Correlation Coefficients of Link Travel Times .....................................................74 5.1 Relationship Between the Different Types of Disaggregation..............................78 5.2 Simulated and Smoothed Speed Profiles of an Individual Vehicle.......................81 5.3 Temporal Variation in Mean Corridor Travel Times ............................................83 5.4 Temporal Variation in Total Delay .......................................................................84 5.5 Temporal Variation in Percentage of the Corridors Congested ............................85 5.6 Spatial and Temporal Variation in Travel Time Variability .................................87 5.7 Spatial and Temporal Variation in Travel Rates ...................................................88 5.8 Spatial and Temporal Variation in Level of Service .............................................89 6.1 Percentage Deviation as a Result of Various Levels of Temporal and Spatial Disaggregation.....................................................................................................100 6.2 Example of Spatial Disaggregation in Noise Pollution .......................................108 6.3 Comparison Between Aggregate and Disaggregate Scenarios............................111 7.1 Layout of the I-10 Corridor and the Locations of the AVI Stations....................117 7.2 Normalized Utility Values for the Various Approaches .....................................123

xiv
LIST OF TABLES
Table Page
2.1 Defining the Dimensions of Sustainability............................................................11 2.2 Negative Externalities Associated with the Transportation Sector .......................13 2.3 Policies to Assist in Achieving a Sustainable Transportation System ..................19 2.4 Typical Levels of Aggregation of Performance Measurement .............................22 2.5 Attributes of a Good Performance Measure ..........................................................24 2.6 Objectives and Performance Measures for sustainable Transportation.................26 4.1 Performance Measures for a Transportation Corridor...........................................56 4.2 MAPE Between Link-Based and corridor-Based Travel Time Estimations.........63 4.3 MAPE Between Individual Observations and the Two Levels of Aggregation....67 6.1 Vehicle Classes and VMT Mix Used in the MOBILE5a Model...........................92 6.2 MAPE Between the Interchange Links and the Two More Aggregate Scenarios ............................................................................................109 6.3 Deviation Between the Base Case and Various Levels of Aggregation..............112 7.1 Alternatives to be Evaluated................................................................................118 7.2 Criteria and Sub-Criteria Weights .......................................................................122 7.3 Normalized Utility Values in Percentage ............................................................124 7.4 Equivalency Factors for the Various Vehicle Classes.........................................128 7.5 Aggregate Costs as a Result of Vehicular Emissions..........................................129 7.6 Disaggregate Costs as a Result of Vehicular Emissions .....................................132

1
CHAPTER 1: INTRODUCTION
BACKGROUND Sustainable Transportation
Transportation is an essential social and economic activity that also results in a
number of negative externalities, which include (1): i) air pollution; ii) noise pollution;
iii) accidents; iv) energy use; v) congestion; vi) depletion of oil and other natural
resources; vii) social disruption; and viii) damage of landscape and soil. These negative
externalities are associated with all facets of the transportation lifecycle that include the
production of vehicles, their use, and ultimately their disposal. The fact that the rate of
the worldís motor vehicle growth is projected to outpace the worldís population growth
is, therefore, a major concern (2). In the United States, for example, it was estimated that
over the past twenty-five years the rate of increase in drivers was seventy-two percent
compared to an increase in population growth of only twenty-three percent. Also, during
the same period the rate of increase in household vehicles was estimated to be more than
six times the rate of population growth (3). Planners and environmentalists have
predicted that such trends will result in economic, social, and environmental needs of
both current and future generations not being met. This challenge led to the creation of
the concept of sustainable development.
The term sustainable development was introduced as early as 1980, and in 1987 the
report by the World Commission on Environment and Development (the so-called
Brundtland Commission) provided a definition for sustainable development that is still
widely used (4): ì development that meets the needs of the present without compromising
the ability of future generations to meet their own needs.î The Presidentís Council on
Sustainable Development, which President Clinton established in 1993, subsequently
adopted this definition (5). Sustainable transportation can be seen as an expression of
sustainable development in the transportation sector and it can be defined as follows (6):
ì sustainable transportation involves infrastructure investments and travel policies that
serve multiple goals of economic development, environmental stewardship, and social
equity. The objective is to optimize the use of the transportation system to achieve
2
economic and related social and environmental goals, without sacrificing the ability of
future generations to achieve the same goals.î
The concepts and principles associated with sustainable transportation are well
documented and are supported by many decision-makers. These concepts and principles
are related to the dimensions of sustainable development and include the improvement
and protection of the following aspects (7):
• employment;
• efficiency;
• livability;
• equity;
• safety and security;
• accessibility;
• mobility;
• and environmental protection.
Although these are all laudable goals, the challenge remains to insure that they are
implemented. Methodologies for their implementation in a consistent and comprehensive
manner, however, are virtually nonexistent. Sustainable transportation can be considered
as one of the most debated but least applied concepts in urban and transportation planning
(8).
Many authors have investigated possible deficiencies with regard to current
transportation planning practice and identified the following as key areas for
improvement (8-15): i) the lack of understanding and recognition of the increasingly
important social, economic, environmental, and public policy issues; ii) the lack of
practical guidelines on how to address these challenges; iii) the lack of quantified
measures so that progress can be monitored and decisions made; and iv) the lack of co-
ordination between decision-makers and other stakeholders.
These deficiencies can to a large extent be addressed if the concepts associated with
sustainable transportation are clearly defined and quantified. The reality, however, is that
the sustainability implications of transportation have not been quantified and are even
3
qualitatively unclear (10). The reasons why sustainable transportation has not been
adequately quantified can be summarized as follows (13,14):
• Sustainable transportation is a fairly new concept of which the objectives and
scope of activities are unclear;
• There is a lack of guidelines for identifying appropriate performance measures;
• The current state of the practice in terms of modeling and planning techniques is
too limited in its level of accuracy and detail to adequately quantify sustainable
transportation performance measures; and
• Even if sustainable transportation performance measures can be adequately
quantified, it is unclear how to make trade-offs and decisions in a consistent and
unbiased manner.
Performance Measures for Sustainable Transportation
The first challenge, therefore, is to identify appropriate performance measures for
sustainable transportation. Performance measures for sustainable development can be
defined as (16) ì various statistical values that collectively measure the capacity to meet
present and future needs as well as public policy goals and outcomes.î Performance
measures have a number of specific applications, but in general they are used to assist
decision-makers in making informed decisions (17,18).
The importance of performance measures related to sustainable transportation has
been widely recognized. Gardner and Carlsen state that (19) ì if we are to make good
decisions about policy relating to sustainable transportation we need reliable
information on the state of the environment and the factors that impact upon it.î The
Intermodal Surface Transportation Efficiency Act of 1991 (ISTEA) and the
Transportation Equity Act of the 21st Century (TEA-21) make reference of performance
measures and their use in monitoring different policies related to sustainable
transportation (20,21). To adhere to the requirements of these pieces of legislation,
performance measures are required to address environmental, social, and economic
objectives in addition to the general transportation objectives. Specific criteria such as
mobility, connectivity, accessibility, energy efficiency, air quality, noise, safety,
4
neighborhood impact, resource impact, and economic development will have to be
addressed (22).
A number of performance measures that have historically been used for other
purposes, such as mobility and congestion studies, can potentially be used for quantifying
sustainable transportation. These performance measures up to now have been quantified
with data that are aggregated over many vehicles. The researchers in this study postulated
that the capability of modeling travel characteristics on a disaggregate level can improve
the accuracy with which such performance measures are quantified. This is the case
because a number of negative externalities such as vehicular emissions are inherently
nonlinear. In these situations aggregate approximations may result in considerable error.
More importantly, considering only averages or aggregate information can cause analysts
to overlook a number of crucial sustainability issues. (23).
Modeling Techniques for Sustainable Transportation
The second challenge is to adequately quantify performance measures for sustainable
transportation. In the case of base year conditions, performance measures are mostly
quantified with survey data, although there are a number of performance measures or
applications for which data need to be manipulated with models. Predictions of future
conditions are exclusively made with the aid of models. Models used for sustainable
transportation analysis include transportation planning models, traffic simulation models,
transportation environmental impact models, and economic models.
The current state of the practice in terms of transportation planning modeling is the
so-called four-step travel demand model. This is a macroscopic approach that results in
aggregate vehicle flows on the selected network (24). New innovations in transportation
modeling, however, make it possible to obtain travel information at the disaggregate
level. An example of such a model is the Transportation Analysis and Simulation System
(TRANSIMS) model that is currently under development by the Los Alamos National
Laboratory (25). On the data collection front, the advent of Automatic Vehicle
Identification (AVI) has also made it possible to monitor travel characteristics on a
disaggregate level (23). Transportation environmental impact models include air
5
pollution models, noise pollution models, and energy consumption models. Economic
models are used to determine the economic implications of transportation.
Decision-Making for Sustainable Transportation
The third challenge is to use performance measures for measurement and decision-
making in the context of sustainable transportation. Because the transportation system is
comprised of a complex system with conflicting economic and environmental objectives,
it is necessary to use a decision-making technique that can consider the multiple and
conflicting objectives (26). Single-objective decision-making techniques such as benefit-
cost analysis (which is based on monetary values) are not adequate to deal with the
complexities associated with sustainable transportation (27). Various multi-criteria
decision-making techniques have been developed to deal with this complex problem.
STATEMENT OF THE PROBLEM
The actual implementation of sustainable transportation concepts up to now have
been very disappointing, and successes are few and far between (28). The reason for this
is that the concept of sustainable transportation is still unclear and it has not been
adequately quantified. There is, therefore, a need to clearly define sustainable
transportation and to show how performance measures can assist in quantifying it.
Because sustainability requires a more integrated view of the world, traditional
performance measures that just look at specific transportation related aspects are often
not very useful as indicators for sustainable transportation (29). The challenge is to assess
the outcomes of transportation programs and policies in terms of the broader
sustainability goals of economic, social, and environmental sustainability. There is a
myriad of possible indicators that can fall into the realm of sustainable transportation
(30). The selection of appropriate performance measures is very important because they
direct the focus of planners and decision-makers. Because a poor selection of
performance measures can lead to poor decisions and outcomes, there is a need to
propose an approach for identifying appropriate performance measures for sustainable
transportation (30,31).

6
Decision-makers need accurate information on performance measures to be able to
make informed decisions. Some of these performance measures can be quantified on an
aggregate level, whereas others can only be accurately quantified on a disaggregate level.
Performance measures for sustainable transportation based on disaggregate data currently
are virtually nonexistent. This is because, until recently, there has been a lack of adequate
data, tools, and techniques to quantify performance measures at a disaggregate level (32).
The latest state-of-the-art transportation simulation models and data collection
techniques, however, are able to provide travel-related information at a disaggregate
level. There is, therefore, a need to develop procedures with the latest transportation
modeling and data collection techniques to quantify additional performance measures and
to improve the accuracy with which some existing performance measures are quantified.
The process by which alternatives are to be formulated, evaluated, and selected is
becoming more constrained in terms of required procedures and outputs (33). Multi-
criteria decision-making techniques have the potential to deal with the complexities
associated with sustainable transportation (27). It is, therefore, necessary to investigate
existing multi-criteria decision-making techniques to determine whether they are suitable
for dealing with the decision-making problems regarding sustainable transportation, and
to propose a suitable technique.
RESEARCH OBJECTIVES
This research begins with the hypothesis that the accuracy with which performance
measures for sustainable transportation are quantified can be improved by quantifying
such measures on a more disaggregate level. The objective of this research is to develop
and apply a methodology through which disaggregate travel information can be used to
supplement traditional aggregate travel information in quantifying performance measures
for sustainable transportation and to use such quantified measures in the decision-making
process. The research will focus on the following elements:
• To define sustainable transportation and propose a mechanism for identifying
appropriate performance measures for sustainable transportation;
7
• To use AVI data and the state-of-the-art in transportation simulation models to
quantify travel related performance measures at aggregate and disaggregate
levels;
• To use traffic simulation models and environmental impact models to quantify
environmental related sustainable transportation performance measures;
• To conduct various comparisons between the aggregate and disaggregate
approaches; and
• To illustrate the application of sustainable transportation performance measures
through the use of a multi-criteria decision-making technique and the allocation of
responsibility through equivalency factors.
The scope of the research will be such that the methodologies that are developed will
be of a generic nature that can be applied at both the local and network-wide levels, as
well as for a wide range of sustainable transportation performance measures. The
applications, however, will focus on mobility and environmental related performance
measures for freeway corridors.
CONTRIBUTION OF THE RESEARCH
Performance measures for sustainable transportation up to now have only been
quantified in very limited cases. Even when such measures have been quantified, it was
based on aggregate datasets. This research will illustrate how to obtain disaggregate
travel information and use it to improve quantification of performance measures for
sustainable transportation. The following are some of the individual contributions of the
research: i) sustainable transportation is defined and a framework is proposed for
identifying, quantifying, and using performance measures in the decision-making
process; ii) the shortcomings of the current aggregate-based practice and the benefits of
the proposed methodology for quantifying performance measures for sustainable
transportation at a disaggregate level are demonstrated; and iii) a methodology for using
performance measures for sustainable transportation in the decision-making process is
proposed.
8
ORGANIZATION OF THE REPORT
The report has been divided into eight chapters. Chapter 1 includes an introduction to
the research and covers aspects such as background, statement of the problem, research
objectives, methodology, contribution of the research, and organization of the report.
Chapter 2 provides a literature review of the state of the art of the main topics of this
research. It includes a review of sustainable transportation, legislative and policy
frameworks, performance measures for sustainable transportation, modeling techniques,
and decision-making for sustainable transportation.
Chapter 3 provides a framework for achieving sustainable transportation. It contains a
proposed definition for sustainable transportation, the decision-making process for
sustainable transportation, and some candidate performance measures. Chapter 4 contains
an illustration on how travel time and travel time variability can be quantified at various
levels of aggregation by using AVI data. Chapter 5 illustrates how a wide range of
mobility related performance measures can be quantified at various levels of aggregation
by using a transportation planning model, TRANSIMS.
Chapter 6 illustrates how environmental related performance measures such as
vehicular emission, noise pollution, and fuel consumption can be quantified at various
levels of aggregation by using a traffic simulation model and environmental models. The
implication of quantifying all the above-mentioned performance measures at the various
levels of aggregation is discussed. Chapter 7 includes two applications of performance
measures for sustainable transportation, namely: using performance measures in a multi-
criteria decision-making technique; and allocating responsibility to motorists for
generating negative externalities.
Chapter 8 contains the conclusions and a proposal for future research.

9
CHAPTER 2: LITERATURE REVIEW
In Chapter 1 this report identified a number of needs that have to be addressed in
order to ensure the effective and efficient implementation of the concepts of sustainable
transportation. This chapter contains a literature review on the state of the practice with
respect to identifying and addressing these needs. The main focus areas of the literature
review are: sustainable transportation; legislative, planning, and policy frameworks;
performance measures; and modeling techniques.
SUSTAINABLE TRANSPORTATION Evolution of the Concept of Sustainable Transportation
In order to obtain a thorough understanding of the concept of sustainable
transportation it is instructive to explore its evolution. While the term sustainable
development is fairly recent, some principles associated with it date back to the
eighteenth century economist and philosopher Thomas Malthus. He theorized that
temporary improvements in human living standards would trigger population surges,
which would outpace technological growth and resource availability (34). These theories
were rekindled during the early 1960s when there was a growing concern over the human
impact on the environment (2). In the 1970s scientists identified some specific concerns
such as global warming, acid rain, depletion of the ozone layer, excessive population
growth, loss of tropical forests, and biological diversity (2). The term sustainable
development was first used by the World Conservation Strategy (WCS) in 1980. They
stressed the interdependence of conservation and development and emphasized that
humanity is part of nature and has no future unless people conserve nature and natural
resources (2).
In 1987 the report by the World Commission on Environment and Development (the
so-called Brundtland Commission) re-emphasized the importance of sustainable
development and provided the widely used definition for sustainable development, as
included in Chapter 1 (4). The United Nations Conference on Environment and
Development (UNCED), which was held in Rio de Janeiro in 1992, gave the concept of
10
sustainable development the status of a global mission through the adoption of the so-
called Agenda 21 (35).
The momentum for achieving sustainable development accelerated during the 1990s
and there are currently numerous initiatives of sustainable development across the world,
particularly in Europe, Canada, and the United States. Important initiatives in the United
States include the Presidentís Council on Sustainable Development and the Livability
Agenda of the President and Vice President. The mandate of the Presidentís Council on
Sustainable Development is to advise the president on key sustainability issues (5). The
Livability Agenda focuses on strengthening the Federal role in support of state and local
efforts to build livable communities for the twenty-first century (36).
Definitions for Sustainable Development and Sustainable Transportation
The concept of sustainability has been much debated and argued over. A number of
authors have provided definitions for sustainable development and sustainable
transportation (4,17,37-42). The definitions for sustainable development are fairly wide
ranging although they all include some type of reference to intergenerational equity,
where the goal is to ensure a quality environment for current and future generations.
Sustainability, therefore, refers to long-term availability of adequate resources that are
necessary for the achievement of pre-specified goals. Development and growth should
also be maintained within the ecological boundaries and should not extend beyond the
carrying capacity of the natural environment. Sustainable development is, therefore, a
dynamic concept that takes into consideration the expanding needs of a growing world
population, including its entire social, economic, ecological, geographic, and cultural
dimensions (28). It should also be noted that the concept of sustainability should be
viewed as a continuum, representing varying degrees of sustainability and
unsustainability (2).
Sustainable transportation is an expression of sustainable development in the
transportation sector. The challenge is to make transportation sustainable by addressing
its consumptive nature of renewable and non-renewable resources, as well as its
environmental impacts. Large institutions such as the World Bank and the Organization
for Economic Co-operation and Development (OECD), as well as various other authors
11
have provided definitions for sustainable transportation (6,17,32,35,39,42,43,44). These
definitions are all based on the broader concept of sustainable development and are
concerned with meeting current and future mobility and accessibility needs without
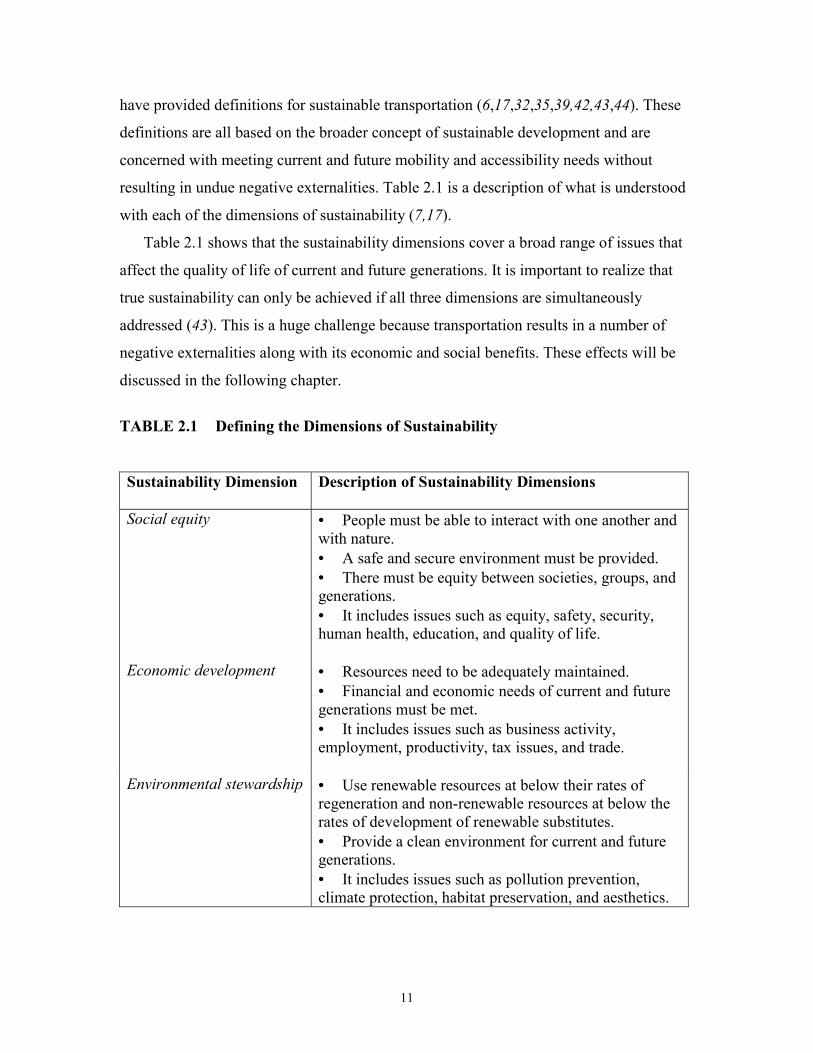
resulting in undue negative externalities. Table 2.1 is a description of what is understood
with each of the dimensions of sustainability (7,17).
Table 2.1 shows that the sustainability dimensions cover a broad range of issues that
affect the quality of life of current and future generations. It is important to realize that
true sustainability can only be achieved if all three dimensions are simultaneously
addressed (43). This is a huge challenge because transportation results in a number of
negative externalities along with its economic and social benefits. These effects will be
discussed in the following chapter.
TABLE 2.1 Defining the Dimensions of Sustainability
Sustainability Dimension
Description of Sustainability Dimensions
Social equity
• People must be able to interact with one another and with nature. • A safe and secure environment must be provided. • There must be equity between societies, groups, and generations. • It includes issues such as equity, safety, security, human health, education, and quality of life.
Economic development
• Resources need to be adequately maintained. • Financial and economic needs of current and future generations must be met. • It includes issues such as business activity, employment, productivity, tax issues, and trade.
Environmental stewardship • Use renewable resources at below their rates of regeneration and non-renewable resources at below the rates of development of renewable substitutes. • Provide a clean environment for current and future generations. • It includes issues such as pollution prevention, climate protection, habitat preservation, and aesthetics.

12
Negative Externalities
The economic system takes renewable and non-renewable resources from the
environment, processes them to derive some benefits and then discards what is left as
different forms of waste into the environment. The only continuous external input into the
global system is solar energy, and the only output leaving the system is low-level heat.
The dumping of waste streams may lead to substantial and sometimes irreversible
damage to the environment. The interests of future generations are damaged: if non-
renewable resources are used without enabling the production of full substitutes; if
renewable resources are used faster than they can be reproduced; or if more waste is
dumped into the environment than the ecological systems can safely absorb (45).
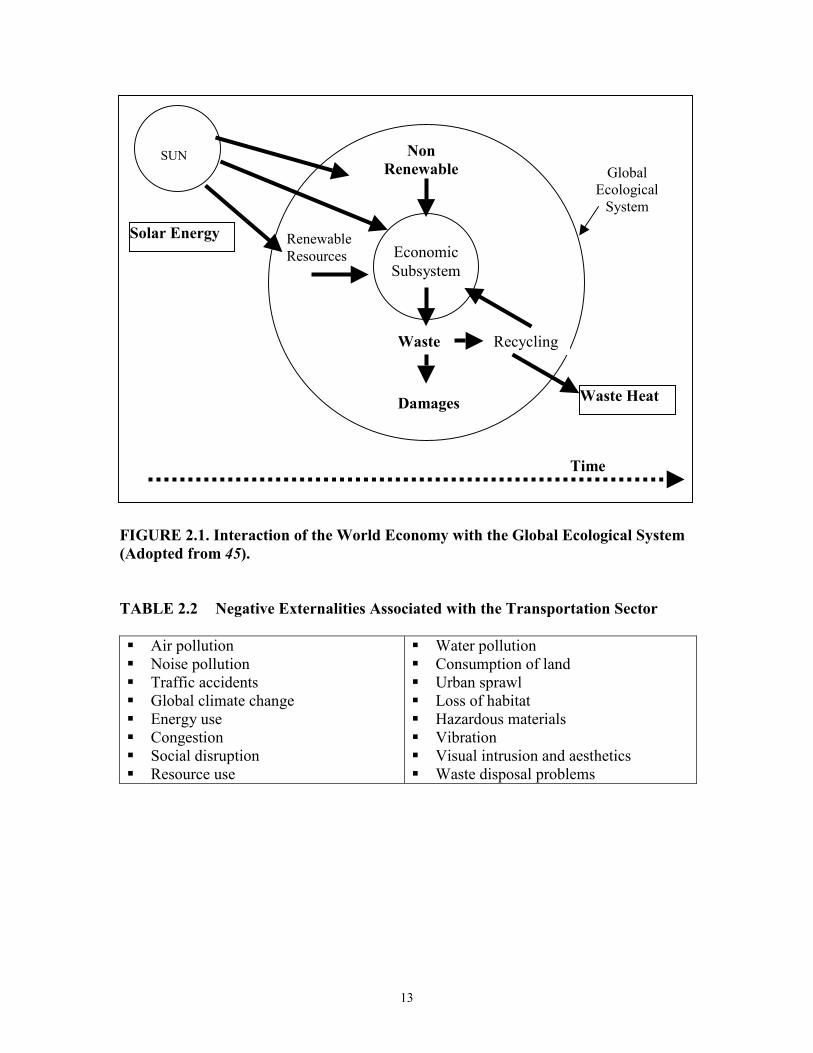
Figure 2.1 shows how the world economy interacts with the global ecological
subsystem. In this figure the economic subsystem is represented as the inner circle in the
diagram and the global ecological system as the outer circle. In an unsustainable situation
the size of the economic subsystem continues to increase up to a point that the ecological
system is not able to accommodate it anymore (45). Transportation plays a key role in the
economic system and, therefore, has a major impact on the ecological system. Results
showed that transportation can typically represent ten percent of a nationís gross
domestic product and is responsible for twenty-two percent of the global energy
consumption and twenty-five percent of fossil fuel burning across the world (2,46). Table
2.2 provides a brief description of each of the negative externalities associated with
transportation.
13
FIGURE 2.1. Interaction of the World Economy with the Global Ecological System (Adopted from 45). TABLE 2.2 Negative Externalities Associated with the Transportation Sector Air pollution Noise pollution Traffic accidents Global climate change Energy use Congestion Social disruption Resource use
Water pollution Consumption of land Urban sprawl Loss of habitat Hazardous materials Vibration Visual intrusion and aesthetics Waste disposal problems
SUN
Economic Subsystem
Non Renewable
Renewable Resources
Waste
Damages
Recycling
Waste Heat
Solar Energy
Time
Global Ecological System
14
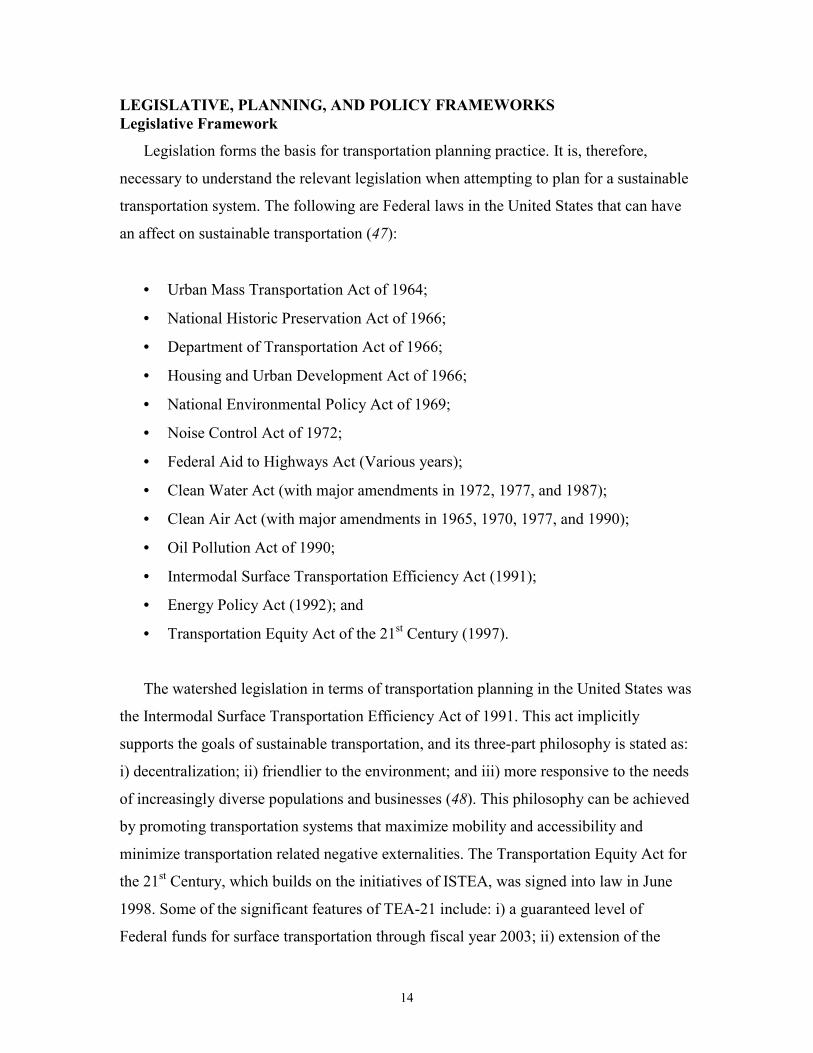
LEGISLATIVE, PLANNING, AND POLICY FRAMEWORKS Legislative Framework
Legislation forms the basis for transportation planning practice. It is, therefore,
necessary to understand the relevant legislation when attempting to plan for a sustainable
transportation system. The following are Federal laws in the United States that can have
an affect on sustainable transportation (47):
• Urban Mass Transportation Act of 1964;
• National Historic Preservation Act of 1966;
• Department of Transportation Act of 1966;
• Housing and Urban Development Act of 1966;
• National Environmental Policy Act of 1969;
• Noise Control Act of 1972;
• Federal Aid to Highways Act (Various years);
• Clean Water Act (with major amendments in 1972, 1977, and 1987);
• Clean Air Act (with major amendments in 1965, 1970, 1977, and 1990);
• Oil Pollution Act of 1990;
• Intermodal Surface Transportation Efficiency Act (1991);
• Energy Policy Act (1992); and
• Transportation Equity Act of the 21st Century (1997).
The watershed legislation in terms of transportation planning in the United States was
the Intermodal Surface Transportation Efficiency Act of 1991. This act implicitly
supports the goals of sustainable transportation, and its three-part philosophy is stated as:
i) decentralization; ii) friendlier to the environment; and iii) more responsive to the needs
of increasingly diverse populations and businesses (48). This philosophy can be achieved
by promoting transportation systems that maximize mobility and accessibility and
minimize transportation related negative externalities. The Transportation Equity Act for
the 21st Century, which builds on the initiatives of ISTEA, was signed into law in June
1998. Some of the significant features of TEA-21 include: i) a guaranteed level of
Federal funds for surface transportation through fiscal year 2003; ii) extension of the
15
Disadvantaged Business Enterprises (DBE) program; iii) strengthening of the safety
programs; iv) continuation of the highways and transit initiatives under ISTEA; and v)
investing in research and its application to maximize the performance of the
transportation system (21). Apart from these pieces of legislation, the Clean Air Act
Amendments (CAAA) of 1990 and the National Environmental Policy Act (NEPA)
process ensure that air pollution associated with transportation is addressed (20).
Planning Framework
ISTEA and TEA-21 also outline transportation planning requirements of state
departments of transportation and metropolitan planning organizations (MPOs). These
requirements must be followed in order for these levels of government to receive Federal
funding for transportation projects. Metropolitan areas are required to develop long-term
(twenty-year) Metropolitan Transportation Plans (MTPs) and short-term (three-year)
Transportation Improvement Plans (TIPs). The metropolitan areas provide their TIPs to
the state so that it can prepare a Statewide Transportation Improvement Plan (STIP) (14).
Where the planning process identifies a problem in a corridor or sub-area that suggests
the possible need for a major investment using Federal funds, a Major Investment Study
(MIS) may be required. The purpose of a MIS is to analyze solutions to address
substantial transportation problems and to present this information to decision-makers
(20).
The NEPA process focuses on projects after they have been included in the MTP or
TIP. This process can be performed in conjunction or at the end of a MIS. There are three
classes of action that prescribe the level of documentation required in the NEPA process.
These actions relate to the type of transportation investments and their anticipated
impacts on the environment, and can be summarized as follows (20):
• Class I: Environmental Impact Statement: These are actions that significantly
affect the environment and require an Environmental Impact Statement (EIS).
• Class II: Categorical Exclusions: These are actions that do not have a significant
effect and are excluded from the requirements to prepare environmental
assessments.
16
• Class III: Environmental Assessment: These are actions in which the significance
of the environmental impact is not clearly established. An Environmental
Assessment (EA) needs to be prepared to determine the appropriate
environmental document required.
The Clean Air Act Amendments of 1990 set forth specific air quality goals to be
achieved by certain dates. Once an area reaches attainment, it is classified as a
maintenance area for twenty years past the attainment date and must still fulfill CAAA
requirements. The United States Environmental Protection Agency (EPA) is the Federal
agency charged with implementing the CAAA. The EPA established National Ambient
Air Quality Standards (NAAQS) in 1970, with the purpose of protecting human life. In
terms of the NAAQS the EPA has set national air quality standards for six principal
pollutants, namely CO, lead, NOx, ozone, particulate matter and SO2. The CAAA require
that the EPA review the NAAQS every five years to determine if the standards are still
adequate. The EPA relies on the states for preparing State Implementation Plans (SIPs) to
submit to the EPA, detailing how they intend to reduce vehicular emissions (49).
If the EPA classifies an area as non-attainment for air quality, those transportation
plans and programs must conform to air quality goals or Federal funding may be
withheld. The plans demonstrate conformity if the planís forecasted emission estimates
are less than or equal to that areaís on-road Motor Vehicle Emissions Budget (MVEB)
listed in the SIP. A MVEB is generally required for each transportation related pollutant
and/or pollutant precursor for which the area is in non-attainment. If a non-attainment
area cannot demonstrate conformity within the required timeframe, a transportation
conformity lapse occurs. During such a lapse, the EPA allows only certain transportation
projects to proceed. Conformity determination must be performed each time a SIP is
revised that adds, deletes, or changes emission budgets, or when Transportation Control
Measures (TCMs) are submitted to the EPA, detailing how those reductions will occur
(49).
ISTEA requires non-attainment area MTPs to be reviewed and updated at least every
three years, whereas TIPs in non-attainment areas must be updated at least every two
years. The CAAA state that conformity to a SIP means conformity to the planís purpose
17
of eliminating or reducing the severity and number of violations of the NAAQS. In
addition, the activities must not cause or contribute to a new violation, increase the
frequency or severity of an existing violation, or delay timely attainment of any standard
interim milestone (50).
The procedure of showing that the transportation plans, programs and projects are
conforming to air quality goals is a long and detailed process that requires many skilled
personnel and a sizable budget. It is, however, a very necessary process to assist in
achieving sustainable transportation. Failure to adhere to the CAAA and the
ISTEA/TEA-21 requirements can have serious consequences, both due to Federally
imposed sanctions in the form of funding that is withheld, as well as all the negative
effects related to poor air quality.
Policy Framework
As in the case of legislation, policies can play a pivotal role in achieving the goals of
sustainable transportation. The concept of policy may be defined as (51) ì a purposeful
course of action followed by an actor or set of actors in dealing with a problem or matter
of concern.î This definition of policy links it to a goal oriented action rather than to
random behavior or chance occurrences. Public policies are those developed by
governmental bodies, and they are designed to accomplish specified goals or produce
definite results (51). Because policies are linked to goals, they can be developed as part
of a strategic planning exercise. The transportation sector is, however, a particularly
difficult sector to address due to its high dependence on fossil fuels and the fact that
objectives associated with an effective and efficient transportation system are often not
compatible with environmental objectives (52). The development of appropriate policy
for transportation is, therefore, a complex issue.
The main focus of a policy for sustainable transportation should be to achieve long-
term sustainability based on the understanding that the world economy is a sub-system of
the global ecological system, which is restricted by its capacity (45). The World Bank
defines a policy for sustainable transportation as follows (39): ì it identifies and
implements the win-win policy instruments and explicitly confronts the tradeoffs so that
the balance is chosen rather than accidentally arrived at. It is a policy of informed,
18
conscious choices.î A number of authors have investigated policy options to support
sustainable transportation. The following are some of the most important policy
categories that can be used in the context of sustainable transportation, whereas Table 2.3
shows a detailed listing of the specific policies that can be utilized under each category
(17,28,43,53,54,55):
• Pricing policies: Transportation systems and services must be priced to result in
the optimal allocation of resources. This entails the inclusion of external social
costs into the pricing of transportation.
• Technology policies: Technology plays a vital role in providing transportation
options, making information available to users, and reducing environmental
damage.
• Non-motorized transportation policies: Among the different modes of
transportation, walking and cycling rank highest on the sustainability scale, and
the single-occupant automobile ranks the lowest. It is, therefore, necessary to have
policies in place that promote the utilization of non-motorized modes of
transportation.
• Regulatory or prohibitive policies: In some instances it is necessary to regulate
and prohibit certain actions.
• Traffic management policies: Traffic flow conditions can be improved through a
number of traffic management techniques, and improved traffic flow can assist in
making transportation more sustainable.
• Behavioral and educational policies: Users of the transportation system need to
change their transportation behavior in order to facilitate the achievement of a
more sustainable transportation system.
• Land use and transportation policies: Without adequate land use reforms and an
integrated land use and transportation approach, the goals of sustainable
transportation are not likely to be met.

19
TABLE 2.3 Policies to Assist in Achieving a Sustainable Transportation System
Pricing policies: Taxes Subsidies User fees Area licensing Parking Allowances Buyback programs Technology policies: ITS for transit and ridesharing ITS for car users Resource efficient vehicle technology Telecommuting and teleconferencing Non-motorized transportation policies: Investment in bicycle and walking Statewide promotion campaigns Regulatory or prohibitive policies: Emission and noise standards Speed limits Parking regulations Carrier regulations
Traffic management policies: Efficient signal timing Freeway ramp metering High occupancy vehicle lanes Route guidance Traffic calming measures Incident management Travel demand management Behavioral and educational policies: Promoting voluntary ì no driveî days Statewide promotion campaigns Training for the general public Education for children Land use and transportation policies: Improve access Improve mobility Employ mixed-use developments Limit sprawl Reconfiguring zoning ordinances Land use investment strategies Regulatory land use strategies Parking requirements
Table 2.3 shows that there are numerous policies that can support the goals of
sustainable transportation. Decision-makers will select the specific policies based on the
goals and objectives developed through a strategic planning exercise. Once appropriate
policies have been selected and implemented, they need to be monitored with the aid of
performance measures (6).

20
PERFORMANCE MEASURES The Role of Performance Measures
Performance measures or indicators are very important in the context of sustainable
development and sustainable transportation. Agenda 21 of the United Nations Conference
on Environment and Development considers the function of performance measures as
follows (56): ì indicators of sustainable development need to be developed to provide
solid bases for decision-making at all levels and to contribute to a self-regulating
sustainability of integrated environment and development systems.î Performance
measures are broadly used for simplification, quantification, and communication. They
are able to translate data and statistics into succinct information that can be readily
understood and used by several groups of people including scientists, administrators,
politicians, and the general public (57,58). A comprehensive performance measure would
include measurements of the condition, trends over time, and the share attributed to the
different agencies and/or actors (56).
ISTEA and TEA-21 recognize performance monitoring as a critical part of
transportation planning and have called for a more performance-based approach. This
requires that the performance of transportation systems must be quantitatively measured
for a variety of modes and criteria (22). Apart from the requirements of legislation,
performance measures can be very powerful planning and management tools. The
following are some of the most important uses of performance measures (31,59): provide
a broad perspective; assess facility or system performance; calibrate models; identify
problems; develop and assess improvements; formulate programs and priorities; educate
a wide range of interest groups; and set policies. Although performance measures have a
wide range of applications, there are instances where they should not be used, such as to
(59): isolate the effects of individual regulations; provide a full economic analysis; define
acceptable levels of impact; and set final priorities. Performance measures are, therefore,
able to provide the decision-maker with the quantitative information necessary to make
informed decisions.

21
Levels of Aggregation
Performance measures are quantified with information that is prepared from various
data sources. The quantified performance measures can be aggregated and weighted in
order to produce composite measures known as indices (56). Indices are often used to
measure trends and to track progress toward a goal. They have been developed for a
number of applications such as for infrastructure conditions and congestion. The
advantages of indices are as follows (60):
• Easy to use;
• Simple to interpret; and
• Ability to reduce information overloads that can often result from individual
performance measures.
The problems with indices, however, are as follows (44):
• Can mask information;
• Their robustness can be limited by different spatial and temporal scales; and
• It is not always clear how and by whom the indices were developed.
Very few authors have looked into indices for sustainable transportation. Litman
proposes a sustainable transportation index that is based on fourteen performance
measures that range from personal travel characteristics to transportation system
performance (29). Black proposes an index that is based on principal component analysis
and that uses the following measures (61):
• Dependence on petroleum fuels;
• Impact of emissions on local air quality and human health;
• Number of injuries and fatalities due to road accidents;
• The effect of congestion; and
• Availability of other modes.
22
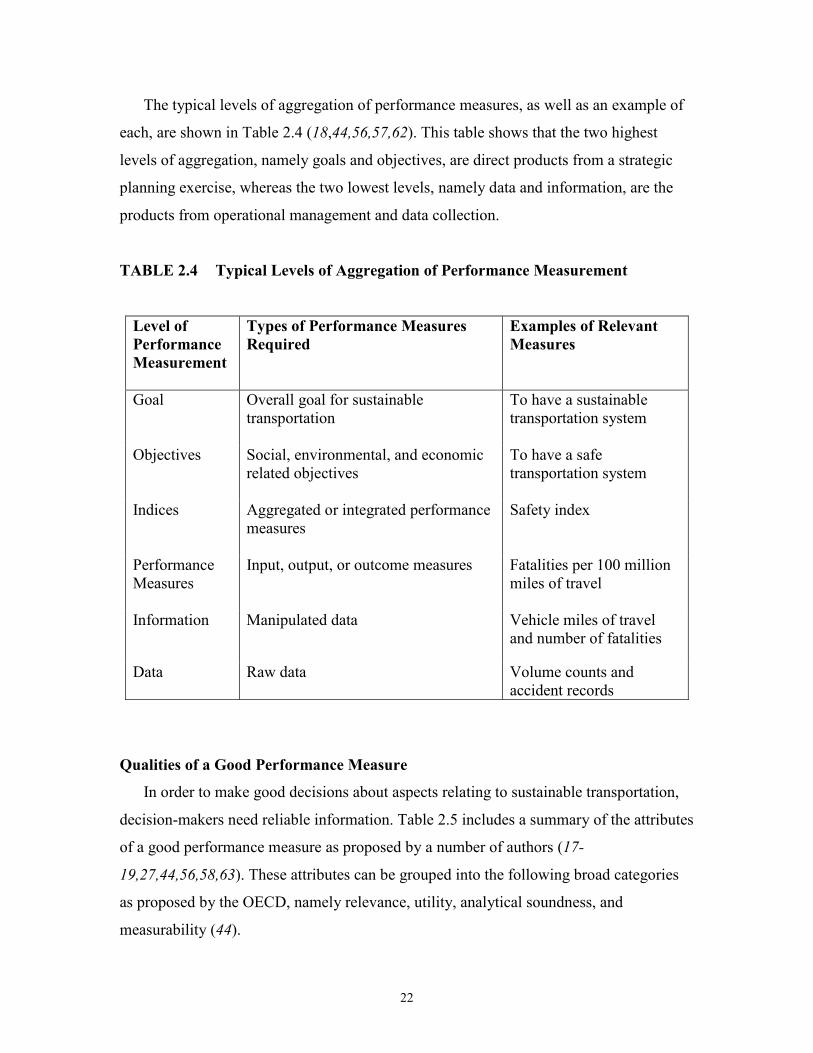
The typical levels of aggregation of performance measures, as well as an example of
each, are shown in Table 2.4 (18,44,56,57,62). This table shows that the two highest
levels of aggregation, namely goals and objectives, are direct products from a strategic
planning exercise, whereas the two lowest levels, namely data and information, are the
products from operational management and data collection.
TABLE 2.4 Typical Levels of Aggregation of Performance Measurement
Level of Performance Measurement
Types of Performance Measures Required
Examples of Relevant Measures
Goal
Overall goal for sustainable transportation
To have a sustainable transportation system
Objectives
Social, environmental, and economic related objectives
To have a safe transportation system
Indices
Aggregated or integrated performance measures
Safety index
Performance Measures
Input, output, or outcome measures Fatalities per 100 million miles of travel
Information
Manipulated data Vehicle miles of travel and number of fatalities
Data Raw data Volume counts and accident records
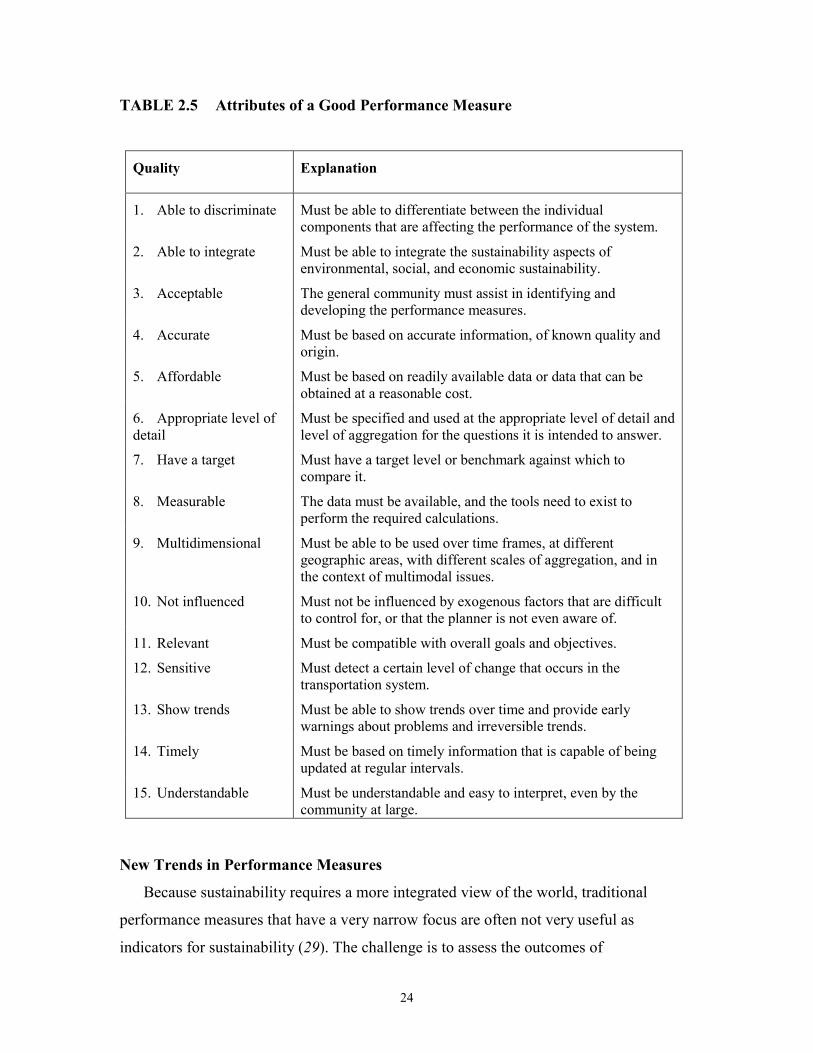
Qualities of a Good Performance Measure
In order to make good decisions about aspects relating to sustainable transportation,
decision-makers need reliable information. Table 2.5 includes a summary of the attributes
of a good performance measure as proposed by a number of authors (17-
19,27,44,56,58,63). These attributes can be grouped into the following broad categories
as proposed by the OECD, namely relevance, utility, analytical soundness, and
measurability (44).

23
It should be noted that the fifteen attributes of a good performance measure as
suggested in Table 2.5 are in effect a wish-list for which the planner strives. It will be
very rare for a performance measure to possess most of the attributes listed in Table 2.5.
There are instances where certain attributes of a good performance measure are not
compatible and a particular performance measure will, therefore, not comply with both
such characteristics. As an example, it is very difficult for a performance measure to be
simple (understandable at the community level) and also able to address certain complex
multidimensional aspects. It is often necessary, therefore, to have a variety of indicators
for different applications.
24
TABLE 2.5 Attributes of a Good Performance Measure
Quality
Explanation
1. Able to discriminate Must be able to differentiate between the individual components that are affecting the performance of the system.
2. Able to integrate Must be able to integrate the sustainability aspects of environmental, social, and economic sustainability.
3. Acceptable The general community must assist in identifying and developing the performance measures.
4. Accurate Must be based on accurate information, of known quality and origin.
5. Affordable Must be based on readily available data or data that can be obtained at a reasonable cost.
6. Appropriate level of detail
Must be specified and used at the appropriate level of detail and level of aggregation for the questions it is intended to answer.
7. Have a target Must have a target level or benchmark against which to compare it.
8. Measurable The data must be available, and the tools need to exist to perform the required calculations.
9. Multidimensional Must be able to be used over time frames, at different geographic areas, with different scales of aggregation, and in the context of multimodal issues.
10. Not influenced Must not be influenced by exogenous factors that are difficult to control for, or that the planner is not even aware of.
11. Relevant Must be compatible with overall goals and objectives.
12. Sensitive Must detect a certain level of change that occurs in the transportation system.
13. Show trends Must be able to show trends over time and provide early warnings about problems and irreversible trends.
14. Timely Must be based on timely information that is capable of being updated at regular intervals.
15. Understandable Must be understandable and easy to interpret, even by the community at large.
New Trends in Performance Measures
Because sustainability requires a more integrated view of the world, traditional
performance measures that have a very narrow focus are often not very useful as
indicators for sustainability (29). The challenge is to assess the outcomes of
25
transportation programs and policies in terms of the broader goals of economic, social,
and environmental sustainability. Subordinate to this goal are the more operational
questions of how well the transportation system is performing in supporting these goals.
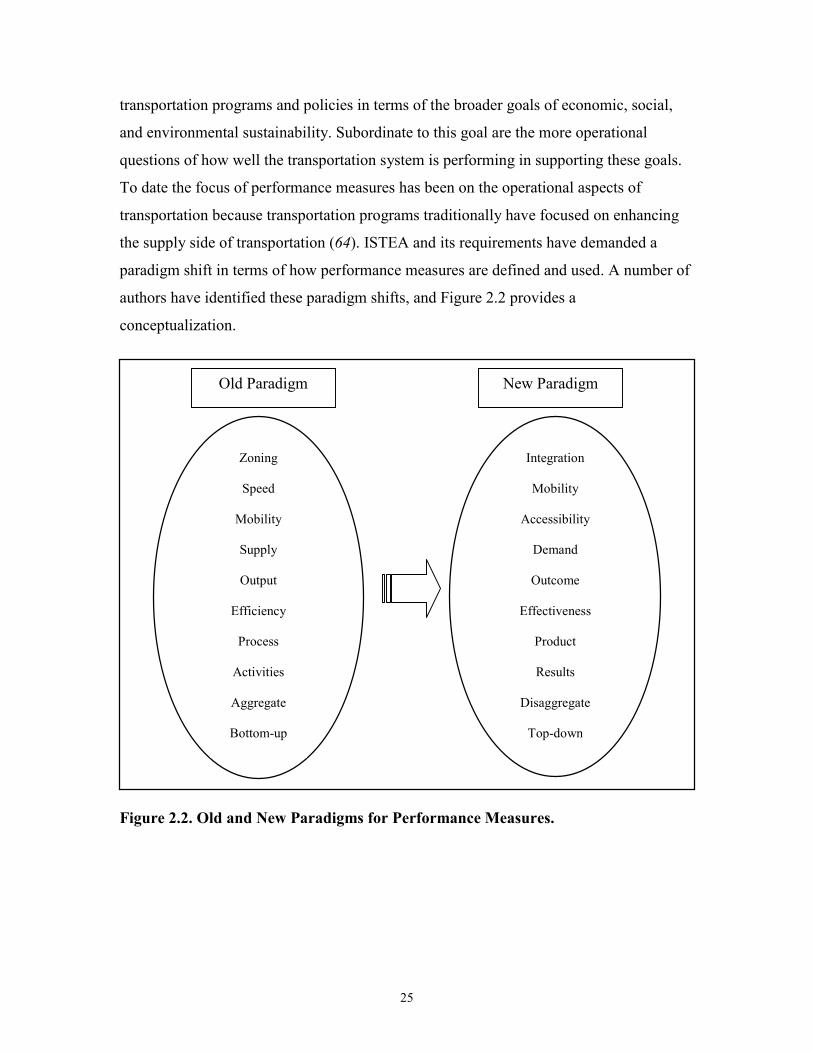
To date the focus of performance measures has been on the operational aspects of
transportation because transportation programs traditionally have focused on enhancing
the supply side of transportation (64). ISTEA and its requirements have demanded a
paradigm shift in terms of how performance measures are defined and used. A number of
authors have identified these paradigm shifts, and Figure 2.2 provides a
conceptualization.
Figure 2.2. Old and New Paradigms for Performance Measures.
Integration
Mobility
Accessibility
Demand
Outcome
Effectiveness
Product
Results
Disaggregate
Top-down
Old Paradigm
Zoning
Speed
Mobility
Supply
Output
Efficiency
Process
Activities
Aggregate
Bottom-up
New Paradigm
26
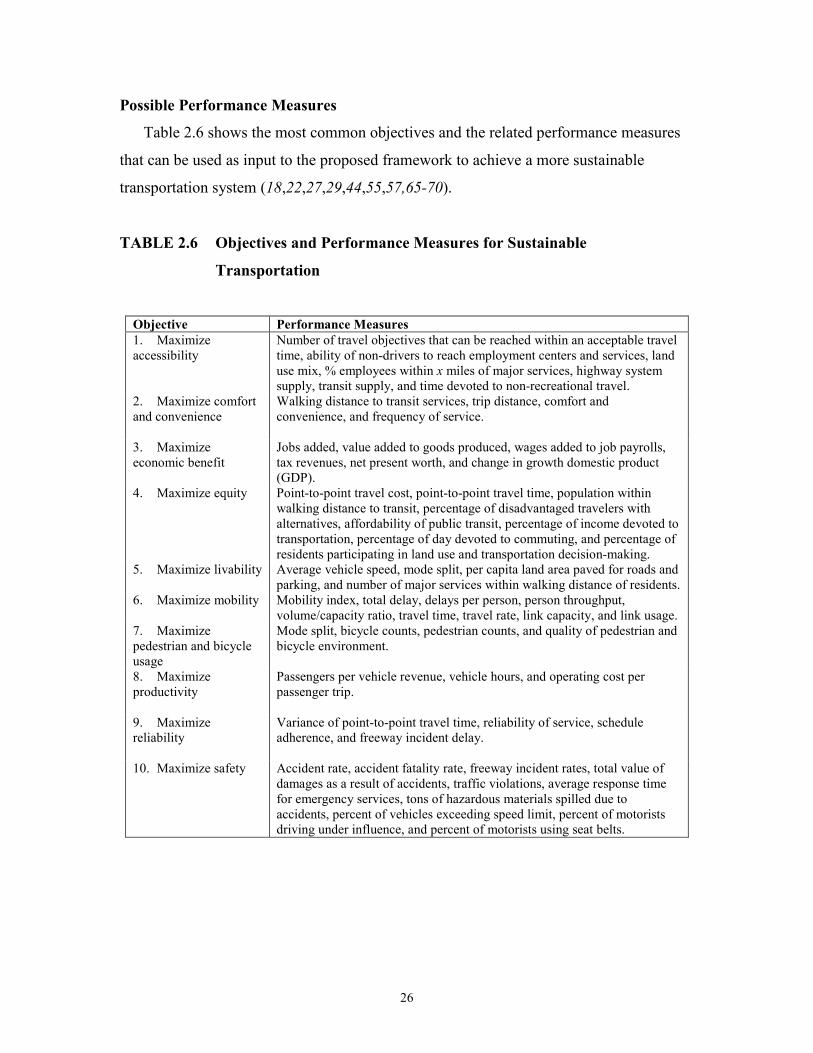
Possible Performance Measures
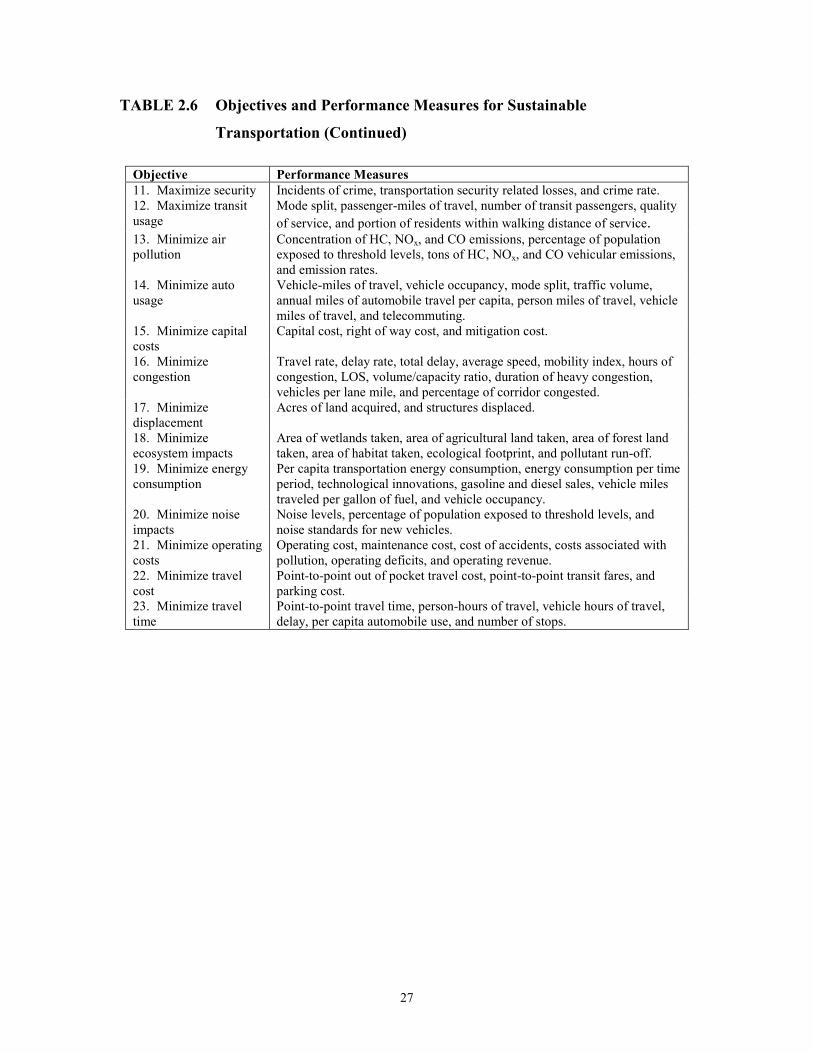
Table 2.6 shows the most common objectives and the related performance measures
that can be used as input to the proposed framework to achieve a more sustainable
transportation system (18,22,27,29,44,55,57,65-70).
TABLE 2.6 Objectives and Performance Measures for Sustainable
Transportation
Objective Performance Measures 1. Maximize accessibility
Number of travel objectives that can be reached within an acceptable travel time, ability of non-drivers to reach employment centers and services, land use mix, % employees within x miles of major services, highway system supply, transit supply, and time devoted to non-recreational travel.
2. Maximize comfort and convenience
Walking distance to transit services, trip distance, comfort and convenience, and frequency of service.
3. Maximize economic benefit
Jobs added, value added to goods produced, wages added to job payrolls, tax revenues, net present worth, and change in growth domestic product (GDP).
4. Maximize equity
Point-to-point travel cost, point-to-point travel time, population within walking distance to transit, percentage of disadvantaged travelers with alternatives, affordability of public transit, percentage of income devoted to transportation, percentage of day devoted to commuting, and percentage of residents participating in land use and transportation decision-making.
5. Maximize livability
Average vehicle speed, mode split, per capita land area paved for roads and parking, and number of major services within walking distance of residents.
6. Maximize mobility
Mobility index, total delay, delays per person, person throughput, volume/capacity ratio, travel time, travel rate, link capacity, and link usage.
7. Maximize pedestrian and bicycle usage
Mode split, bicycle counts, pedestrian counts, and quality of pedestrian and bicycle environment.
8. Maximize productivity
Passengers per vehicle revenue, vehicle hours, and operating cost per passenger trip.
9. Maximize reliability
Variance of point-to-point travel time, reliability of service, schedule adherence, and freeway incident delay.
10. Maximize safety
Accident rate, accident fatality rate, freeway incident rates, total value of damages as a result of accidents, traffic violations, average response time for emergency services, tons of hazardous materials spilled due to accidents, percent of vehicles exceeding speed limit, percent of motorists driving under influence, and percent of motorists using seat belts.
27
TABLE 2.6 Objectives and Performance Measures for Sustainable
Transportation (Continued) Objective Performance Measures 11. Maximize security Incidents of crime, transportation security related losses, and crime rate. 12. Maximize transit usage
Mode split, passenger-miles of travel, number of transit passengers, quality of service, and portion of residents within walking distance of service.
13. Minimize air pollution
Concentration of HC, NOx, and CO emissions, percentage of population exposed to threshold levels, tons of HC, NOx, and CO vehicular emissions, and emission rates.
14. Minimize auto usage
Vehicle-miles of travel, vehicle occupancy, mode split, traffic volume, annual miles of automobile travel per capita, person miles of travel, vehicle miles of travel, and telecommuting.
15. Minimize capital costs
Capital cost, right of way cost, and mitigation cost.
16. Minimize congestion
Travel rate, delay rate, total delay, average speed, mobility index, hours of congestion, LOS, volume/capacity ratio, duration of heavy congestion, vehicles per lane mile, and percentage of corridor congested.
17. Minimize displacement
Acres of land acquired, and structures displaced.
18. Minimize ecosystem impacts
Area of wetlands taken, area of agricultural land taken, area of forest land taken, area of habitat taken, ecological footprint, and pollutant run-off.
19. Minimize energy consumption
Per capita transportation energy consumption, energy consumption per time period, technological innovations, gasoline and diesel sales, vehicle miles traveled per gallon of fuel, and vehicle occupancy.
20. Minimize noise impacts
Noise levels, percentage of population exposed to threshold levels, and noise standards for new vehicles.
21. Minimize operating costs
Operating cost, maintenance cost, cost of accidents, costs associated with pollution, operating deficits, and operating revenue.
22. Minimize travel cost
Point-to-point out of pocket travel cost, point-to-point transit fares, and parking cost.
23. Minimize travel time
Point-to-point travel time, person-hours of travel, vehicle hours of travel, delay, per capita automobile use, and number of stops.
28
MODELING TECHNIQUES Once the appropriate performance measures have been identified, modeling
techniques are often used to quantify such measures over space and time (17). Models for
quantifying sustainable transportation include transportation models, transportation
environmental impact models, and economic models. In addition to output from the
various models, data collected through Intelligent Transportation Systems (ITS)
applications can be used to quantify performance measures for sustainable transportation.
The following is a discussion of aggregate and disaggregate approaches to modeling, as
well as the appropriate data collection and modeling techniques for quantifying
performance measures for sustainable transportation.
Aggregate versus Disaggregate Approaches
The travel behavior of large groups is the manifestation of the travel choices of
numerous individual travelers. Disaggregate travel models are constructed by using data
at the level of the individual traveler, whereas with aggregate models the individuals are
placed into groups with common characteristics. The data that are based on the group are
an aggregate representation of the real underlying distribution of the individual data (71).
The axioms of disaggregate behavioral modeling are that individuals represent the basic
decision-making unit and that individuals will choose one alternative among those
available that they find most desirable or useful. The choice depends on the attributes of
the alternative and the socioeconomic characteristics of the individual (72).
The probability of a decision is considered to be a function of the utility for that
decision (73). For modeling purposes the utility is composed of two components, namely
the observed attributes referred to as the representative utility, and an unobserved
component known as the random utility. Random utility is based on the assumption that
although the individualís choice is rational, an observer cannot accurately predict a given
individualís choice because of the influence of unobserved determinants of choice as
reflected in the random component (74).
The most common way of representing the aggregate data is by a measure of central
tendency such as the mean. Every aggregate representation of the underlying detailed
individual data, however, results in a loss of information. If the underlying disaggregate
29
model is linear over the range of interest, the aggregate forecasting model will have the
same linear specifications. In this case, the averages for the variable can be substituted for
the individual values. However, if the disaggregate model is nonlinear, the disaggregate
functional specification, in which averages will be substituted for individual values, will
give a biased forecast of the average of the dependent variable (75). The average of the
function, therefore, is not equal to the function of the averages, and this bias is widely
known as aggregation bias (73). Clustering the market into groups or segments of
homogeneous characteristics can limit the problem of aggregation bias (74).
The forecasting approach, which employs group means as independent variables, is
known as the ì naÔve methodî or the ì direct methodî of aggregation. The most reliable
method of making predictions with disaggregate models is to use the values for each
individual in the forecasting model as independent variables and make the prediction over
all individuals. This method has been referred to as the ì enumeration method.î The
disaggregate method of analysis indicates that changes in the travel choice environment
affect different market segments in substantially different ways.
A number of crucial sustainability issues, therefore, can be overlooked by only
considering averages or aggregate information. Disaggregate information on the other
hand has the potential of considerably improving the accuracy by which certain
sustainable transportation performance measures are quantified. Various authors have
over a period of more than thirty years studied the application of disaggregate travel
demand models as compared to aggregate travel demand models. They found that apart
from the additional detail, a number of other benefits can be obtained through a
disaggregate approach.
The following are some of the benefits identified, and it is postulated that these
benefits can also be of relevance for disaggregate traffic supply models, which are the
focus of this research (24,71-74,76): calibrating a model on a disaggregate level will
reduce aggregation bias; there is potential to reduce the data requirements, and therefore
the cost, if models are calibrated on individual data; disaggregate models are more
sensitive to changes in individual behavior and changes in policy; recommendations
based on disaggregate models have more credibility, because the results are based on the
effects of individuals, which are considered to be more intuitive; disaggregate models can
30
be applied at any level of aggregation; and there is an improved possibility for
transferring modeling results from disaggregate models from one geographic area to
another.
There are very few examples where aspects related to sustainable transportation are
calculated on a disaggregate level. One application showed better estimates of air
pollution and energy consumption using acceleration noise instead of average speed (77).
In another study it was shown that relatively short segment lengths are needed to detect
localized traffic effects. This study found that traffic disturbances become visible only
when segment lengths are at most half the length of the associated disturbance (78).
Intelligent Transportation System (ITS) Data
Intelligent Transportation Systems are becoming very prevalent in a variety of
transportation applications. Automatic Vehicle Identification, Automatic Vehicle
Location (AVL), cellular phone technology, and Global Positioning Systems (GPS) are
examples of ITS applications that can be used to obtain disaggregate travel data.
Of these techniques, AVI technology can be used to capture disaggregate travel data.
It has emerged recently in various traffic management and toll collection applications. An
AVI system consists of an in-vehicle transponder (tag), a roadside reader unit, and a
central computer system. When a vehicle that is equipped with a transponder passes a
roadside reader unit, the information on the transponder is read by the reader unit and
transferred to the central computer. The information that is sent to the central computer
will include the vehicleís identification number, the time that it was read, the date that it
was read, and the number of the reader unit that performed the read. For computing travel
times, the central computer monitors several consecutive reader units, matches the
transponder identification numbers, and computes the travel time information. Travel
time information is very important for quantifying a number of performance measures for
sustainable transportation (31).
Transportation Models
The current state of the practice in terms of transportation modeling is the so-called
four-step travel demand model. This is a macroscopic approach based on a disaggregate
31
trip generation model, an aggregate trip distribution model, a disaggregate mode split
model, and an aggregate network assignment model. Disaggregate in this instance refers
to the individual level, and aggregate refers to groups of vehicles. The net result of this
type of model is aggregate vehicle flows on the selected network, as well as the
associated level of service performance measures (24). This modeling structure was
developed decades ago and is largely unchanged for the past fifteen years. These models
were adequate for the purpose for which they were developed, namely for making broad
decisions regarding major transportation investments. They are, however, not adequate to
deal with the new demands from ISTEA, TEA-21, the Clean Air Act and sustainable
transportation in general (55). The major shortcomings of these models are that their
estimates and forecasts are approximate, especially for individual facilities or small sub-
areas. They are also not sensitive to ì softer measuresî such as vehicle occupancy, non-
motorized mode share, travel demand management, and various policy changes (55).
The state-of-the-art technologies in transportation planning and modeling make it
possible to obtain travel information at a disaggregate level. These new innovations in
transportation modeling include simultaneous travel demand modeling, where all four
steps are combined into one. An example of such a model is the microscopic
TRANSIMS, which is currently under development by the Los Alamos National
Laboratory. The new technical approaches in TRANSIMS permit analyses of
transportation alternatives, service reliability, and forecast uncertainty. Moreover,
TRANSIMS can perform all of the traditional analyses conducted by the current four-step
models. The model functions by creating a virtual metropolitan region with a complete
representation of the regionís individuals, their activities, and their trip making
characteristics. It is composed of four basic modules with various interactions as
illustrated in Figure 2.3 (79,80). The first box shown in Figure 2.3 is mostly equivalent to
the trip generation and trip distribution steps of the traditional four-step model, whereas
the second box is mostly equivalent to the traffic assignment step of that model.
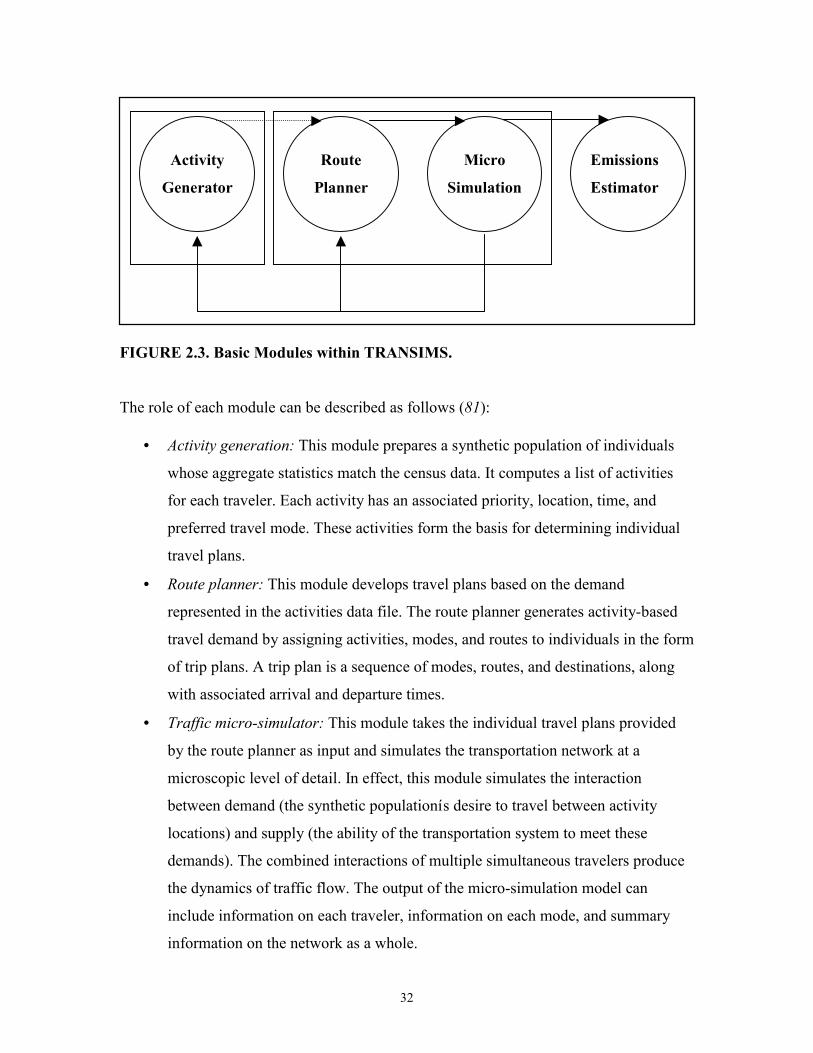
32
FIGURE 2.3. Basic Modules within TRANSIMS. The role of each module can be described as follows (81):
• Activity generation: This module prepares a synthetic population of individuals
whose aggregate statistics match the census data. It computes a list of activities
for each traveler. Each activity has an associated priority, location, time, and
preferred travel mode. These activities form the basis for determining individual
travel plans.
• Route planner: This module develops travel plans based on the demand
represented in the activities data file. The route planner generates activity-based
travel demand by assigning activities, modes, and routes to individuals in the form
of trip plans. A trip plan is a sequence of modes, routes, and destinations, along
with associated arrival and departure times.
• Traffic micro-simulator: This module takes the individual travel plans provided
by the route planner as input and simulates the transportation network at a
microscopic level of detail. In effect, this module simulates the interaction
between demand (the synthetic populationís desire to travel between activity
locations) and supply (the ability of the transportation system to meet these
demands). The combined interactions of multiple simultaneous travelers produce
the dynamics of traffic flow. The output of the micro-simulation model can
include information on each traveler, information on each mode, and summary
information on the network as a whole.
Activity
Generator
Route
Planner
Micro
Simulation
Emissions
Estimator
33
• Emissions estimator: This module translates traveler behavior into estimates of air
quality, energy consumption, and carbon dioxide emissions. It should be noted,
however, that while the vehicles are modeled at a microscopic level of detail their
emissions are not estimated within the micro-simulation module; they are instead
estimated in a separate module from more aggregate output data. This approach
was adopted because there is no guarantee that the microscopic speed profiles
produced by the TRANSIMS micro-simulator are accurate or even reasonable.
Note that TRANSIMS relies heavily on feedback in that congestion, as measured in
the micro-simulation, can affect the synthetic populationís activities, plans, and routes.
Details of the full model may be found elsewhere (79,80,81).
A key concept in the TRANSIMS micro-simulator logic is the particle hopping and
cellular automata models. Particle hopping models originated from work by physicists to
describe particle movement. Cellular automata is a subset of particle hopping models and
is conceptually quite simple. It is this simplicity that allows it to be used to simulate
traffic networks down to the driveway level, in a reasonable amount of time and
accuracy. Cellular automata operates on an array of small clearly bounded locations or
cells that are 7.5 m in length. Each cell can be either occupied by a vehicle or empty. The
vehicles are moved through the network by a set of rules, which controls aspects such as
acceleration, deceleration, and lane changing. The velocity of a given vehicle is an
integer number that ranges from zero to five cells per second, which translates to a range
from 0 to 135 km/h in steps of 27 km/h (79).
Environmental Models
Air Pollution Models
The most commonly used vehicular emission model in North America is the
MOBILE 5a model. This model estimates volatile organic compounds (VOCs), carbon
monoxide (CO), and nitrogen oxide (NOx) emissions from highway vehicles. The
emission rates produced by the model are developed on a disaggregate level and an
attempt is made to consider aspects such as the operating mode (cold start, hot start, and
34
stabilized conditions) (82). The application of the emission rates to obtain total air
pollution values, however, is mostly done on an aggregate level.
There are numerous other initiatives to develop and refine vehicle emission models.
These initiatives are attempting to increase prediction accuracy by using more extensive
databases and to conduct the modeling on a more microscopic level. Some of these
initiatives in the United States are as follows (83):
• The EPA model being developed by the Georgia Institute of Technology;
• The National Cooperative Highway Research Program (NCHRP) Modal Model
being developed by the University of California at Riverside;
• Modal emission projects completed by the University of Michigan;
• Various models developed by the California Air Resources Board (CARB);
• The EMFAC model developed by the California Department of Transportation;
and
• The MOBILE 6 model currently being developed by the Office of Mobile Studies
of the EPA.
Noise Pollution Models
Most traffic noise models estimate noise as a line source rather than per individual
vehicle. The noise impact is estimated based on a variety of variables associated with the
traffic stream and the surrounding environment. Factors that influence noise levels can be
divided into those that influence noise generation and those that affect noise propagation.
Factors influencing noise generation from vehicles include average flow rate,
composition of the vehicle stream, average speed, road surface and tire interface,
roadway gradient, and proximity of the site to a junction. The propagation of noise
between the source and the receiver is dependent upon several factors including the
distance between the source and the receiver, the amount and type of ground cover, the
presence of sound barriers, the angle of view of the receiver, reflection by facades, and
the road width (84).
There are a number of vehicle noise models developed across the world, and the
following are some of the more widely known ones (84,85):
35
• The U.K. DoE model developed in the United Kingdom;
• Various versions of the STAMINA model developed in the United States;
• The Transport and Road Research Laboratory (TRRL) model developed in the
United Kingdom; and
• The new Federal Highway Administration Traffic Noise Prediction Model
(FHWA TNM), which is currently under development by the Federal Highway
Administration. This model is calibrated on a disaggregate data set comprising of
6,000 individual pass-by events and will shortly become the state of the practice
in traffic noise modeling in the United States.
Fuel Consumption Models
Vehicular fuel consumption models are based on variables such as speed,
acceleration, deceleration, fraction of time that the vehicle is stopped, and grade. These
models are mostly calibrated based upon the characteristics of individual vehicles. There
are a number of fuel consumption models available. The following are some of the better
known models (77,86):
• A model contained in the macroscopic simulation model, FREFLO;
• ARFCOM, a detailed incremental power model developed by the Australian Road
Research Board;
• A model developed by Bester based on speed, acceleration, and gradient;
• A module contained in the TRANSIT-7F signal coordination program;
• NETSIM, which utilizes a table to determine the fuel consumption as a function
of both acceleration and speed (this table is now also incorporated in the
CORSIM traffic simulation model); and
• Several other models that are only a function of speed such as FREQ10 and
NETFLO.
CONCLUDING REMARKS
While the term sustainable development is fairly recent, the modern principles
associated with it date back to the eighteenth century when people became aware of the

36
human impact on the environment. Over the years the concept of sustainability has been
much debated and argued over. A number of authors have provided definitions for
sustainable development and sustainable transportation, although none of these
definitions seem to capture all the essential aspects of sustainability.
Current legislation, planning regulations, and policies are becoming more geared
toward the principles of sustainable transportation. The actual implementation of these
principles up to now have, however, been very disappointing, and successes are few and
far between. Inadequate transportation planning practice is mostly blamed for the poor
implementation record of sustainable transportation. Specific deficiencies include a lack
of understanding and appreciation for sustainable transportation, as well as a lack of
quantified measures to monitor progress and to assist with decision-making.
The challenge, therefore, is to identify and quantify appropriate performance
measures for sustainable transportation and to use them in the decision-making process.
The following levels of performance measures were identified, namely data, information,
performance measures, indices, objectives, and goals. The highest levels of aggregation
are direct products of a strategic planning exercise, whereas the two lowest levels are the
products from operational management and data collection. The new trend in
performance measures is for them to become more outcome oriented versus the
traditional efficiency focus. Even though there are numerous performance measures that
can be used in the context of sustainable transportation, there are still challenges
associated with adequately and accurately quantifying such measures.
Models for quantifying performance measures for sustainable transportation include
transportation models, transportation environmental impact models, and economic
models. The state of the practice for these models is to base their information on
aggregate data sets. Significant shortcomings of this approach are the inaccuracies due to
a loss in detail and the effect of aggregation bias. There are very few examples where
aspects related to sustainable transportation are calculated at a disaggregate level. The
latest state of the art in transportation modeling and data collection techniques, however,
make it possible to quantify performance measures at a disaggregate level. New ITS
technologies, for example, make it possible to calculate individual travel times, whereas

37
new transportation models, such as TRANSIMS, make it possible to trace simulated
individual commuters on a second-by-second basis.
The following chapter provides a more comprehensive definition for sustainable
transportation and proposes a framework for identifying, quantifying, and using
performance measures for sustainable transportation in the decision-making process.

39
CHAPTER 3: A FRAMEWORK FOR ACHIEVING SUSTAINABLE
TRANSPORTATION
As discussed in the preceding chapters, the primary reason that sustainable
transportation concepts have not been implemented successfully is that the concepts are
still unclear and have not been adequately quantified. Apart from the lack of clarity with
regard to the interpretation of sustainable transportation, the current state of the practice
in modeling techniques is also inadequate to quantify the sustainable transportation
performance measures at the appropriate level of detail and accuracy. There is, therefore,
a need to define sustainable transportation and to put it in context with the broader issue
of sustainable development. There is also a need to show how performance measures for
sustainable transportation can be identified and how they can be quantified with the latest
state of the art in data collection and modeling techniques.
DEFINING SUSTAINABLE TRANSPORTATION
Various definitions have been proposed for sustainable development and sustainable
transportation. It should be noted that all these definitions are based on the one adopted
by the Brundtlandt commission (4). None of the proposed definitions, however, seems to
capture all the essential aspects of sustainability. The authors propose the following
definition for sustainable development for this research: ì sustainable development is
development that ensures intergenerational equity by simultaneously addressing the
multi-dimensional components of economic development, environmental stewardship,
and social equity. It is a dynamic process, which considers the changing needs of society
both spatially and temporally. Sustainable development can be viewed as a continuum,
representing various degrees of sustainability. It must, however, be achieved within
resource, environmental, and ecological constraints.î
The following principles of sustainable development are included in the definition:
• Intergenerational equity: A major goal of sustainable development is to ensure
that current and future generations can enjoy an acceptable quality of life. There
40
should also be an equitable distribution of resources between communities and
generations.
• Multi-dimensional: The three dimensions of sustainable development are
economic development, environmental stewardship, and social equity. These
dimensions are interrelated and must be simultaneously addressed in order to
meet the needs of current and future generations.
• Dynamic: In considering intergenerational equity it is necessary to take
cognizance of the fact that the needs of societies change both spatially and
temporally.
• Continuum: Sustainability is not represented by discrete indications of
sustainability or unsustainability, but rather as a continuum, which represents
various degrees of sustainability.
The following constraints with regard to sustainable development are included in the
definition:
• Resource constraints: Non-renewable resources should not be used without
enabling the production of substitutes, and renewable resources should not be
used at a faster rate than they can be reproduced.
• Ecological constraints: The ecological boundaries are exceeded if more waste is
dumped into the ecological system than the system can safely absorb, or if the
system is damaged by taking excessive amounts of good, arable land to provide
transportation infrastructure.
• Environmental constraints: The environment is damaged by excessive pollution
that can result in ill health for humans and animals, and damage to plant species.
Pollution can also result in climate changes, which can cause floods, droughts,
and increased diseases.
unstainability can be measured against the needs of communities. Each community
and each sector within each community, however, have different needs and expectations
regarding the principles of sustainable development. These needs are not consistent and
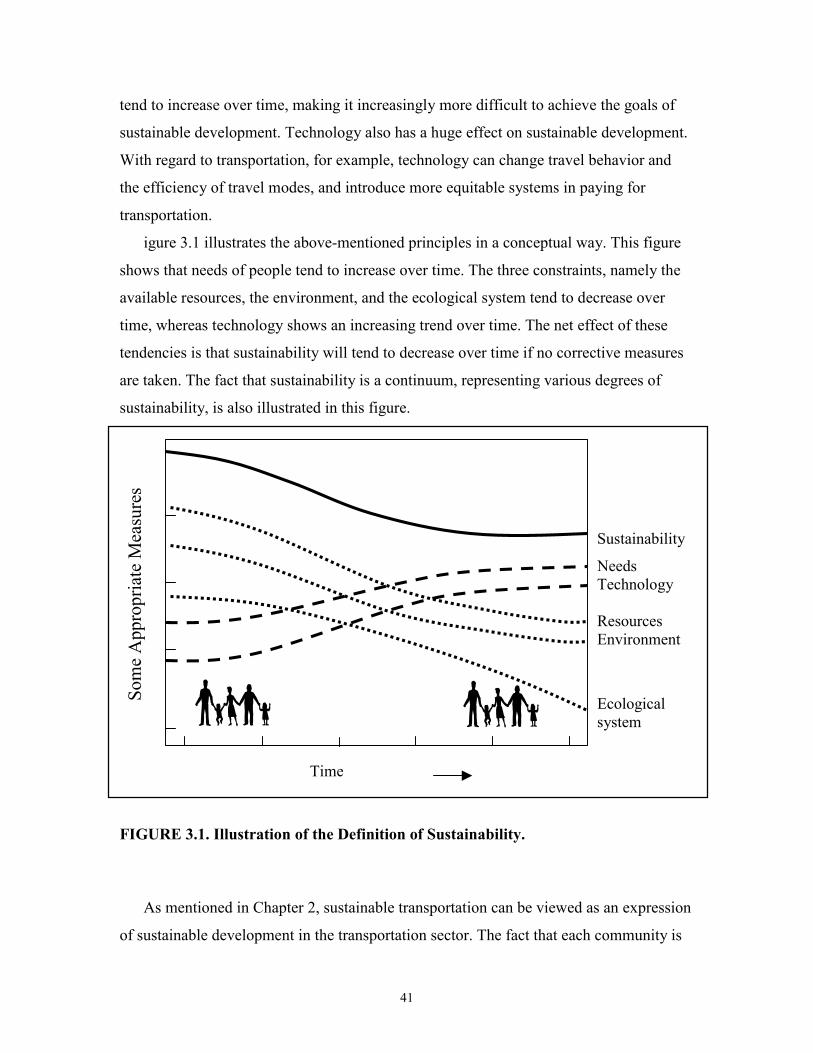
41
tend to increase over time, making it increasingly more difficult to achieve the goals of
sustainable development. Technology also has a huge effect on sustainable development.
With regard to transportation, for example, technology can change travel behavior and
the efficiency of travel modes, and introduce more equitable systems in paying for
transportation.
igure 3.1 illustrates the above-mentioned principles in a conceptual way. This figure
shows that needs of people tend to increase over time. The three constraints, namely the
available resources, the environment, and the ecological system tend to decrease over
time, whereas technology shows an increasing trend over time. The net effect of these
tendencies is that sustainability will tend to decrease over time if no corrective measures
are taken. The fact that sustainability is a continuum, representing various degrees of
sustainability, is also illustrated in this figure.
FIGURE 3.1. Illustration of the Definition of Sustainability.
As mentioned in Chapter 2, sustainable transportation can be viewed as an expression
of sustainable development in the transportation sector. The fact that each community is
Sustainability
Needs Technology Resources Environment
Ecological system
Time
Some Appropriate Measures
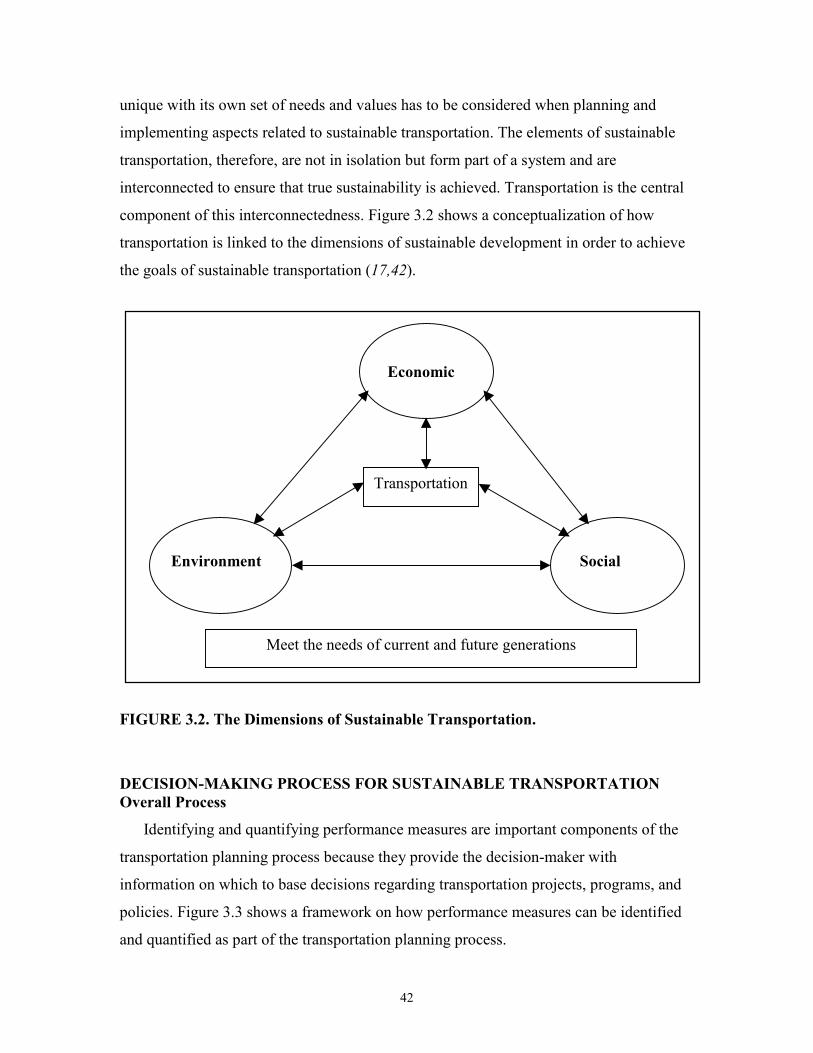
42
unique with its own set of needs and values has to be considered when planning and
implementing aspects related to sustainable transportation. The elements of sustainable
transportation, therefore, are not in isolation but form part of a system and are
interconnected to ensure that true sustainability is achieved. Transportation is the central
component of this interconnectedness. Figure 3.2 shows a conceptualization of how
transportation is linked to the dimensions of sustainable development in order to achieve
the goals of sustainable transportation (17,42).
FIGURE 3.2. The Dimensions of Sustainable Transportation.
DECISION-MAKING PROCESS FOR SUSTAINABLE TRANSPORTATION Overall Process
Identifying and quantifying performance measures are important components of the
transportation planning process because they provide the decision-maker with
information on which to base decisions regarding transportation projects, programs, and
policies. Figure 3.3 shows a framework on how performance measures can be identified
and quantified as part of the transportation planning process.
Economic
Environment Social
Meet the needs of current and future generations
Transportation
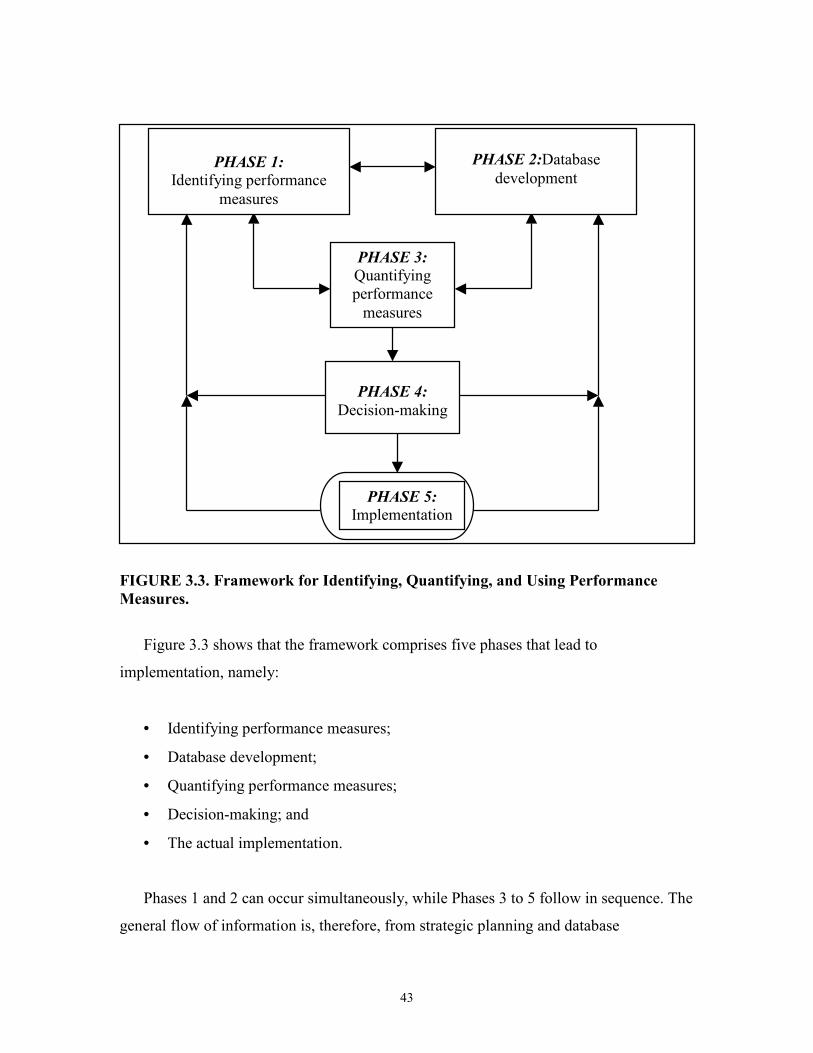
43
FIGURE 3.3. Framework for Identifying, Quantifying, and Using Performance Measures.
Figure 3.3 shows that the framework comprises five phases that lead to
implementation, namely:
• Identifying performance measures;
• Database development;
• Quantifying performance measures;
• Decision-making; and
• The actual implementation.
Phases 1 and 2 can occur simultaneously, while Phases 3 to 5 follow in sequence. The
general flow of information is, therefore, from strategic planning and database
PHASE 4:
Decision-making
PHASE 5: Implementation
PHASE 1:
Identifying performance measures
PHASE 2:Database development
PHASE 3: Quantifying performance measures

44
development toward implementation. At the center of the activities is the quantification
of performance measures, which is linked to Phases 1, 2, and 4. Once decision-making or
implementation has occurred, feedback is required to the first two phases to ensure that
any necessary adjustments can be made. Each of the five phases of the framework will
now be discussed in turn to illustrate how they can be developed and applied.
Phase 1: Identifying Performance Measures
The identification of appropriate performance measures is a very important task
because poor performance measures can lead to poor decisions and poor outcomes. It
should be noted that because interest groups such as the general public, engineers,
managers, and decision-makers have different expectations, needs, and technical
expertise, it is possible to identify different sets of performance measures. Engineers, for
example, prefer a more quantitative approach and tend to strive for optimum results,
whereas most decision-makers are very comfortable with a more qualitative approach.
The increased demand for public participation requires performance measures that are
understandable by the public at large. Consideration of the needs and technical abilities of
the target group, therefore, is of key importance. The strategic planning approach is able
to incorporate the needs and technical abilities of the various interest groups.
The strategic planning process is comprised of a number of steps. These steps are to
develop a vision, mission, goals, objectives, strategies, policies, and actions. As discussed
in Chapter 2, the process does not flow smoothly from one step to the next. It is at best a
highly iterative process that requires consistent checks to ascertain whether the outcomes
of the existing step of the process are consistent with what have been proposed in
previous steps.
The strategic planning process is outlined in Figure 3.4, which shows that a Strengths,
Weaknesses, Opportunities, and Threats (SWOT) analysis feeds into the determination of
strategies and policies. The strengths and weaknesses refer to the internal strengths and
weaknesses of the organization, whereas the opportunities and threats refer to external
opportunities and threats that might impact upon the organization. The SWOT analysis is
a powerful tool to ensure that the strategies and policies are both effective and realistic.
Figure 3.4 also shows that performance measures are identified at the levels of goals

45
and objectives, strategies and policies, and actions. The measures that are identified on
the level of the goals and objectives are more outcome related performance measures.
These measures are often determined by an aggregation of a number of output related
measures. The measures that are identified on the lower levels, namely strategies,
policies, and actions are input and output related performance measures. Output measures
are concerned with the results that are obtained when the transportation system is
functioning, such as volume, travel time, congestion, and various forms of pollution.
Input related measures are concerned with the typical supply side of the transportation
system such as design standards, design speed, and certain policies. Input related
performance measures are used in conjunction with output and outcome measures to
assess aspects related to sustainable transportation. The performance measures that are
identified through this process are the ones that need to be quantified.
Typical constraints for quantifying performance measures for sustainable
transportation include aspects such as the cost of obtaining the data, the difficulty in
obtaining the data, and political sensitivities related to certain types of performance
measures. Planners need to consider these constraints during both Phases 1 and 2.
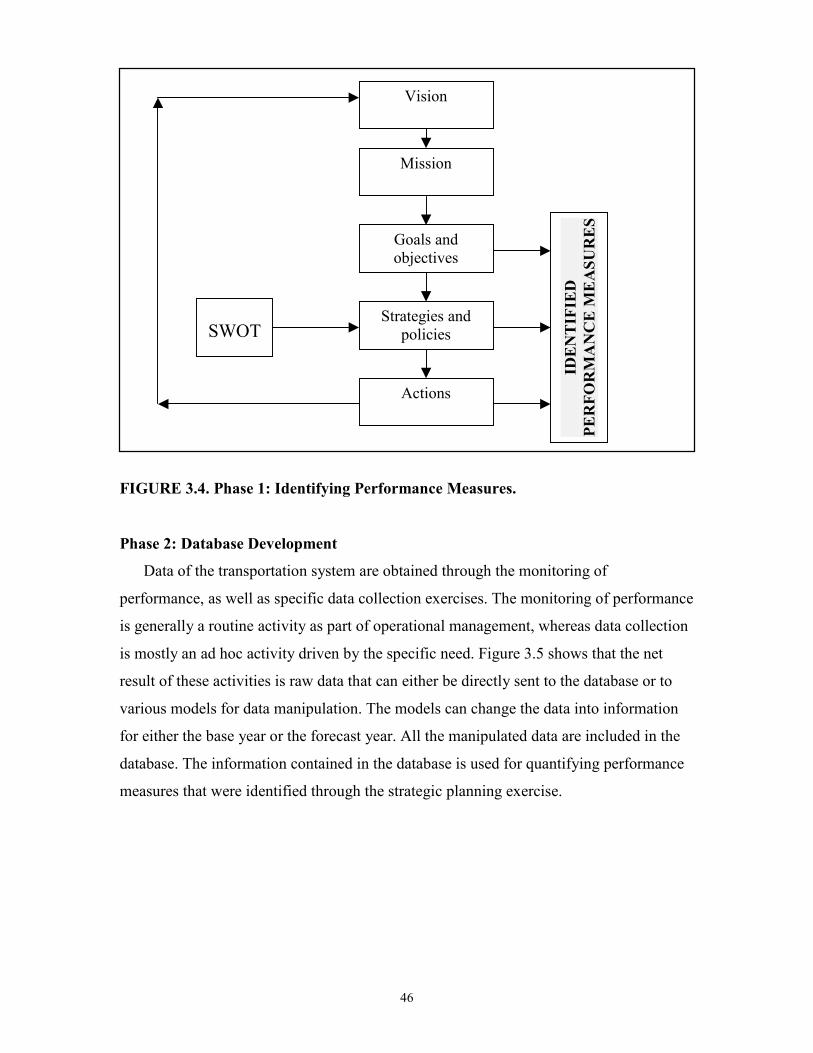
46
FIGURE 3.4. Phase 1: Identifying Performance Measures. Phase 2: Database Development
Data of the transportation system are obtained through the monitoring of
performance, as well as specific data collection exercises. The monitoring of performance
is generally a routine activity as part of operational management, whereas data collection
is mostly an ad hoc activity driven by the specific need. Figure 3.5 shows that the net
result of these activities is raw data that can either be directly sent to the database or to
various models for data manipulation. The models can change the data into information
for either the base year or the forecast year. All the manipulated data are included in the
database. The information contained in the database is used for quantifying performance
measures that were identified through the strategic planning exercise.
Vision
Mission
Goals and objectives
Strategies and policies
Actions
IDENTIFIED
PERFORMANCE MEASURES
SWOT
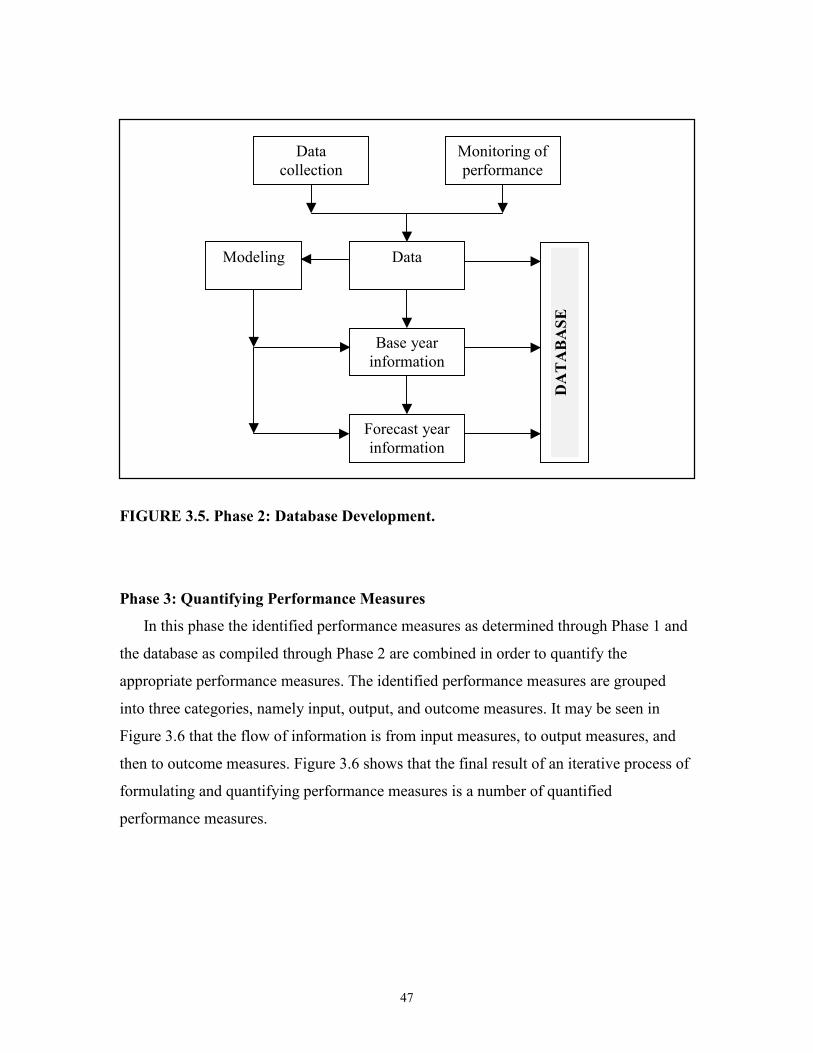
47
FIGURE 3.5. Phase 2: Database Development.
Phase 3: Quantifying Performance Measures
In this phase the identified performance measures as determined through Phase 1 and
the database as compiled through Phase 2 are combined in order to quantify the
appropriate performance measures. The identified performance measures are grouped
into three categories, namely input, output, and outcome measures. It may be seen in
Figure 3.6 that the flow of information is from input measures, to output measures, and
then to outcome measures. Figure 3.6 shows that the final result of an iterative process of
formulating and quantifying performance measures is a number of quantified
performance measures.
Data collection
Monitoring of performance
Data
Base year information
Forecast year information
Modeling
DATABASE
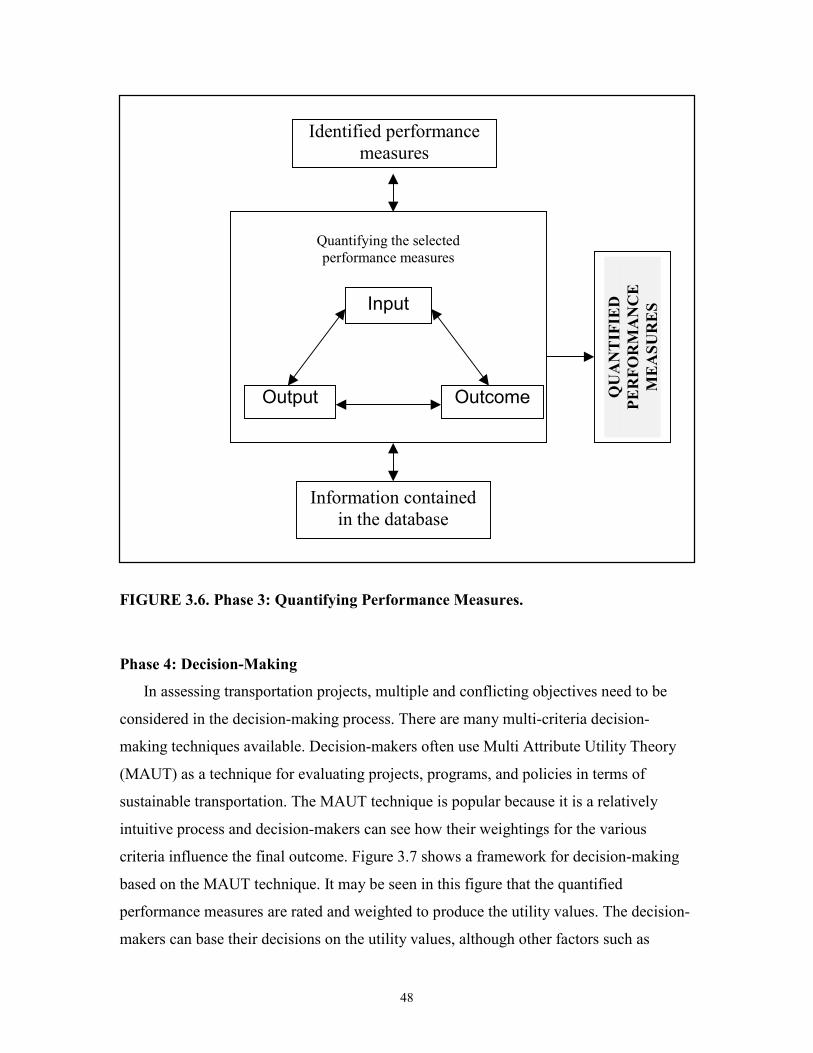
48
FIGURE 3.6. Phase 3: Quantifying Performance Measures.
Phase 4: Decision-Making
In assessing transportation projects, multiple and conflicting objectives need to be
considered in the decision-making process. There are many multi-criteria decision-
making techniques available. Decision-makers often use Multi Attribute Utility Theory
(MAUT) as a technique for evaluating projects, programs, and policies in terms of
sustainable transportation. The MAUT technique is popular because it is a relatively
intuitive process and decision-makers can see how their weightings for the various
criteria influence the final outcome. Figure 3.7 shows a framework for decision-making
based on the MAUT technique. It may be seen in this figure that the quantified
performance measures are rated and weighted to produce the utility values. The decision-
makers can base their decisions on the utility values, although other factors such as
Information contained in the database
Input
OutcomeOutput QUANTIFIED
PERFORMANCE
MEASURES
Identified performance measures
Quantifying the selected performance measures
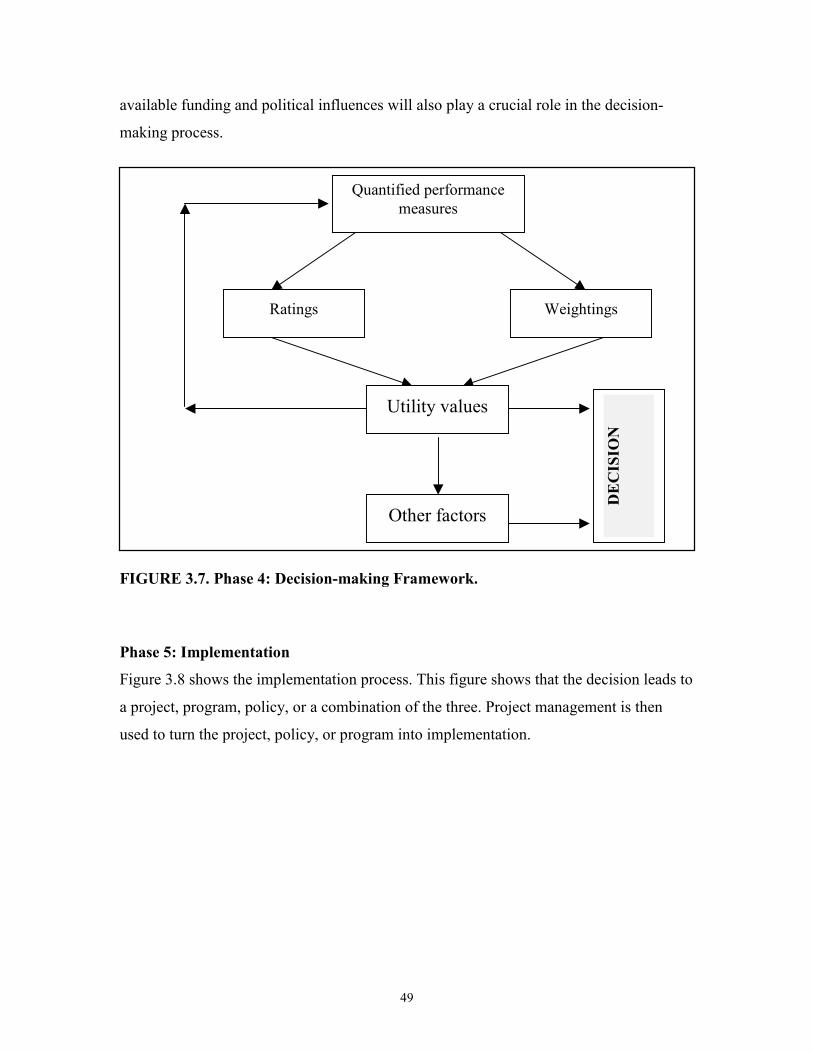
49
available funding and political influences will also play a crucial role in the decision-
making process.
FIGURE 3.7. Phase 4: Decision-making Framework.
Phase 5: Implementation
Figure 3.8 shows the implementation process. This figure shows that the decision leads to
a project, program, policy, or a combination of the three. Project management is then
used to turn the project, policy, or program into implementation.
Quantified performance measures
Ratings Weightings
DECISION
Utility values
Other factors
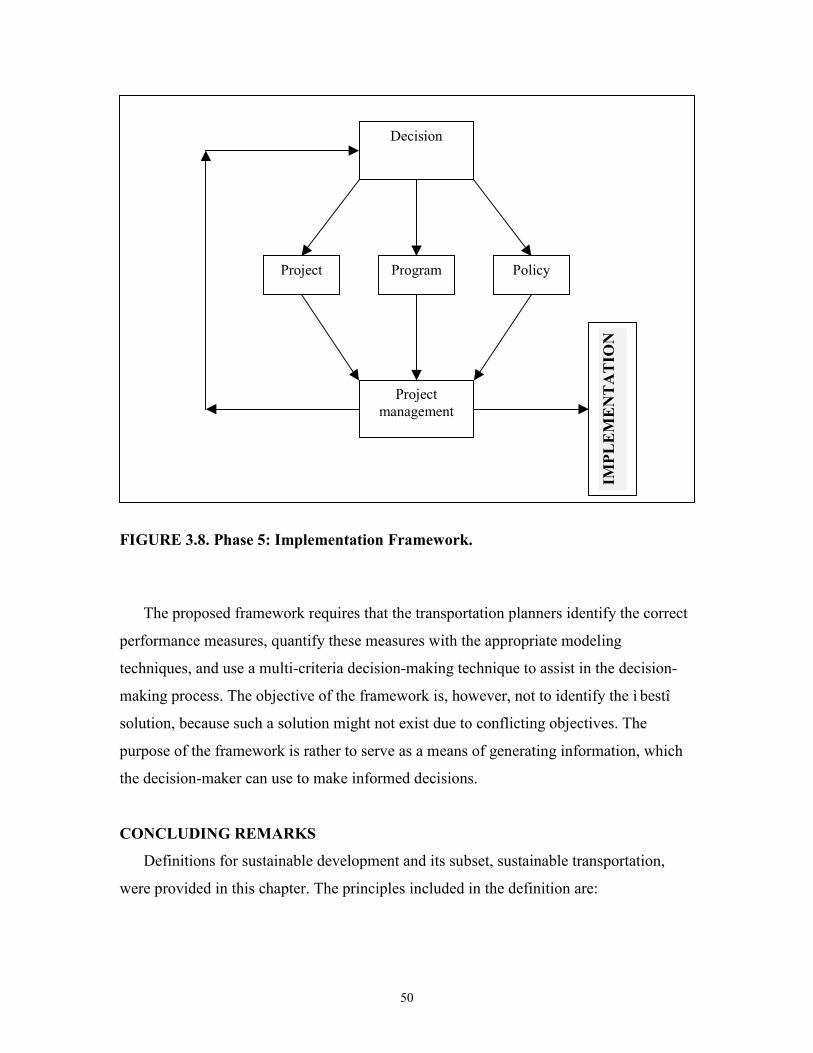
50
FIGURE 3.8. Phase 5: Implementation Framework.
The proposed framework requires that the transportation planners identify the correct
performance measures, quantify these measures with the appropriate modeling
techniques, and use a multi-criteria decision-making technique to assist in the decision-
making process. The objective of the framework is, however, not to identify the ì bestî
solution, because such a solution might not exist due to conflicting objectives. The
purpose of the framework is rather to serve as a means of generating information, which
the decision-maker can use to make informed decisions.
CONCLUDING REMARKS
Definitions for sustainable development and its subset, sustainable transportation,
were provided in this chapter. The principles included in the definition are:
Decision
Program
Project management
IMPLEMENTATION
Policy Project
51
i) intergenerational equity; ii) multi-dimensional; iii) dynamic over space and time; and
iv) continuum. Constraints that may directly influence sustainability are i) resource
constraints; ii) ecological constraints; and iii) environmental constraints.
The authors proposed a framework on how to identify, quantify, and use performance
measures for sustainable transportation in the transportation planning process. The
framework comprises the following five phases that are interlinked to ensure adequate
feedback and information flow:
• Identifying performance measures;
• Database development;
• Quantifying performance measures;
• Decision-making; and
• Implementation.
A comprehensive investigation into important mobility and reliability related
performance measures, namely travel time and travel time variability, is provided. A test
bed comprising of two freeway corridors is introduced that forms the basis for the various
applications. Observed AVI data is used to quantify travel time and travel time variability
at various levels of aggregation, as well as at the level of the individual commuter.
The following chapters will illustrate how this framework can be applied to identify and
quantify performance measures for sustainable transportation.


53
CHAPTER 4: TRAVEL TIME ANALYSIS FROM ITS DATA
In Chapter 3 the authors propose a framework on identifying, quantifying, and using
performance measures for sustainable transportation in the transportation planning
process. This chapter focuses on Phases 1, 2, and 3, namely identification of performance
measures, database development, and quantifying performance measures. The level of the
individual commuter is an important component of disaggregate analysis. In this chapter,
observed AVI data is used for quantifying travel time and travel time variability at the
level of the individual commuter, as well as a number of levels of aggregation.
DESCRIPTION OF THE TEST BED
A 22 km section of the Interstate 10 (I-10) corridor and a 21 km section of the US-
290 corridor in Houston, Texas, were selected as test beds for this research. Figure 4.1
shows a location map of the freeway system in the Houston area. The locations of the two
test corridors relative to the other major freeways, as well as the locations the AVI
stations, are shown in this figure. Both test corridors are divided freeways with full grade
separation, three to four lanes per direction, and high occupancy vehicle (HOV) facilities
in the median.
The portion of the I-10 corridor stretches from just west of the Barker Cypress entry
to just east of the Silber entry, which is approximately seven kilometers from the central
business district (CBD) of Houston. This section of freeway comprises fourteen on-
ramps, twelve off-ramps, and five AVI stations. Each merge and diverge point, as well as
the AVI stations, were considered as nodes, which resulted in a total of twenty-eight links
associated with on- and off-ramps (freeway links) and four larger links associated with
AVI stations (AVI links). The portion of the US-290 corridor stretches from just east of
the FM 1960 entry to just west of the I-610 exit, which is approximately eight kilometers
from the CBD of Houston. This section of freeway is comprised of eleven on-ramps,
twelve off-ramps, and six AVI stations, which resulted in twenty-four freeway links and
five AVI links.
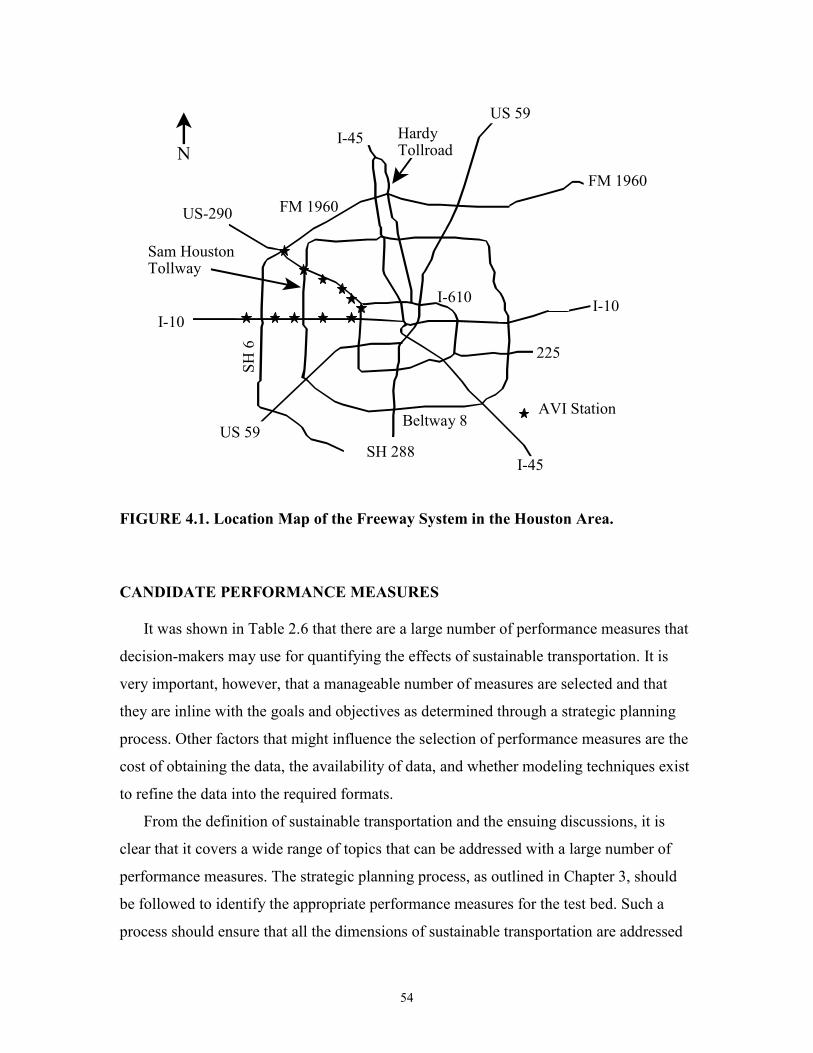
54
US-290
I-45
I-610I-10
US 59
US 59
I-45 HardyTollroad
AVI Station
N
Sam HoustonTollway
FM 1960
225
I-10
FM 1960
SH 6
Beltway 8
SH 288
FIGURE 4.1. Location Map of the Freeway System in the Houston Area.
CANDIDATE PERFORMANCE MEASURES It was shown in Table 2.6 that there are a large number of performance measures that
decision-makers may use for quantifying the effects of sustainable transportation. It is
very important, however, that a manageable number of measures are selected and that
they are inline with the goals and objectives as determined through a strategic planning
process. Other factors that might influence the selection of performance measures are the
cost of obtaining the data, the availability of data, and whether modeling techniques exist
to refine the data into the required formats.
From the definition of sustainable transportation and the ensuing discussions, it is
clear that it covers a wide range of topics that can be addressed with a large number of
performance measures. The strategic planning process, as outlined in Chapter 3, should
be followed to identify the appropriate performance measures for the test bed. Such a
process should ensure that all the dimensions of sustainable transportation are addressed

55
and that the identified performance measures are inline with the strategic goals for the
test corridors. In the context of a freeway corridor, the economic and social dimensions
can be addressed through objectives that are related to mobility, reliability, and economic
benefit, whereas the environmental dimension can be addressed with objectives that are
related to air pollution, noise pollution, and fuel consumption.
Table 4.1 shows the specific performance measures for sustainable transportation that
can be used for a freeway corridor, as well as the objectives and dimensions addressed by
these performance measures. This table shows that the proposed performance measures
make it possible to address all the sustainability dimensions, as well as a reasonable
number of sustainable transportation objectives. It may also be noticed that the selected
performance measures can be quantified with ITS data, simulation models, and
environmental impact models. This chapter, as well as Chapters 5 and 6, contains
illustrations on how these techniques can be used to quantify the performance measures
at various levels of aggregations.
Table 4.1 shows that there are numerous performance measures that can be monitored
in the context of sustainable transportation that are applicable to freeway corridors.
Travel time and travel time variability, however, have been identified as important
components for a number of sustainable transportation performance measures (64-67).
Apart from being mobility and reliability related measures as shown in Table 4.1, travel
time and travel time variability can also be used as input for quantifying the following
sustainable transportation objectives (65,66): i) maximize accessibility; ii) maximize
equity; iii) maximize mobility; iv) maximize reliability; v) minimize air pollution; vi)
minimize congestion; vii) minimize energy consumption; viii) minimize noise impacts;
ix) minimize travel cost; and x) minimize travel time. Automatic vehicle identification
data were used to obtain travel time and travel time variability at the level of the
individual commuter.
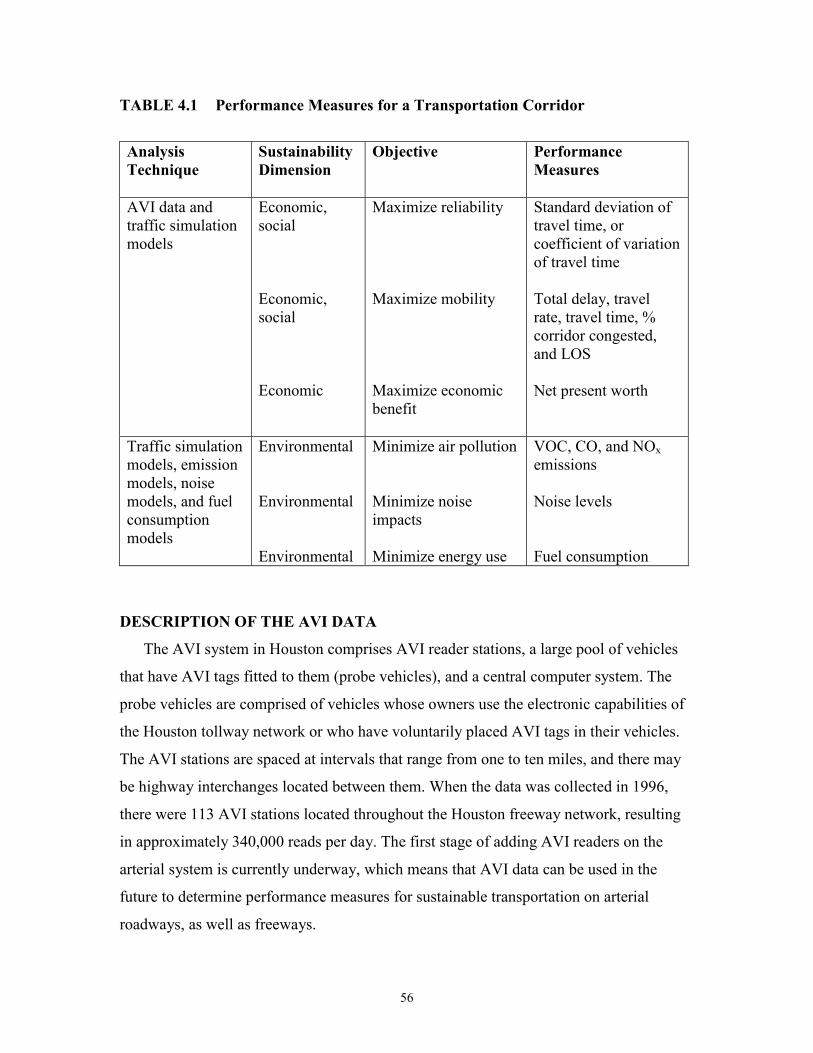
56
TABLE 4.1 Performance Measures for a Transportation Corridor
Analysis Technique
Sustainability Dimension
Objective Performance Measures
AVI data and traffic simulation models
Economic, social Economic, social Economic
Maximize reliability Maximize mobility Maximize economic benefit
Standard deviation of travel time, or coefficient of variation of travel time Total delay, travel rate, travel time, % corridor congested, and LOS Net present worth
Traffic simulation models, emission models, noise models, and fuel consumption models
Environmental Environmental Environmental
Minimize air pollution Minimize noise impacts Minimize energy use
VOC, CO, and NOx emissions Noise levels Fuel consumption
DESCRIPTION OF THE AVI DATA
The AVI system in Houston comprises AVI reader stations, a large pool of vehicles
that have AVI tags fitted to them (probe vehicles), and a central computer system. The
probe vehicles are comprised of vehicles whose owners use the electronic capabilities of
the Houston tollway network or who have voluntarily placed AVI tags in their vehicles.
The AVI stations are spaced at intervals that range from one to ten miles, and there may
be highway interchanges located between them. When the data was collected in 1996,
there were 113 AVI stations located throughout the Houston freeway network, resulting
in approximately 340,000 reads per day. The first stage of adding AVI readers on the
arterial system is currently underway, which means that AVI data can be used in the
future to determine performance measures for sustainable transportation on arterial
roadways, as well as freeways.
57
When a probe vehicle passes a roadside reader unit, the information on the
transponder is read by the reader unit and transferred to the central computer. The
information that is sent to the central computer will include the vehicleís identification
number, the time that it was read, the date that it was read, and the number of the reader
unit that performed the read. For computing travel times, the central computer monitors
several consecutive reader units and matches the transponder identification numbers. In
the data provided for this research, the identification numbers were randomized to yield
anonymous identification numbers so that the privacy of the commuters could be
protected.
For the purpose of this research, the AVI data for sixty-two consecutive weekdays
during September, October, and November of 1996 were obtained. The morning peak
period, which was identified as lasting from 6 a.m. to 9 a.m., was selected as the analysis
period. The three-hour period was divided into twelve fifteen-minute time increments to
ensure that a reasonable number of observations (an average of 120 per time increment)
were obtained for each of the corridors. It should also be noted that in the Highway
Capacity Manual (HCM) the fundamental flow parameters are usually based on point
observations over a fifteen-minute period (87).
Factors such as congestion, driver behavior, incidents, and weather condition can all
influence the travel time and travel time distribution. No major incidents were noticed
during the analysis period and no attempt was made to exclude any observations as a
result of any of the above-mentioned factors. In analyzing AVI data at the disaggregate
level, it was assumed that the same driver used the specific vehicle every time that it was
detected on the corridor. This assumption can be regarded as reasonable because for
commuter trips the same driver normally drives the same vehicle.
When a very long travel time was observed, it was necessary to determine whether
such a travel time was due to congested conditions or because the vehicle had left the
freeway to make a stop before re-entering upstream of the next AVI station. For this
purpose, primary and secondary threshold values were used as proposed by Dixon (88).
The threshold values used for this purpose were based on rolling means, standard
deviations, and medians that are based on the previous ten observations. The primary
threshold value was calculated by: i) assuming that the travel times were normally
58
distributed, and ii) considering a reasonable percentile beyond which probe vehicles were
likely to have exited before reentering the corridor again. Four times the current standard
deviation was used as the primary threshold value.
A secondary threshold was needed because a large change in traffic conditions can
occur between travel time observations. When such a large change occurs, it is possible
that the actual link travel time would jump above the primary threshold value, resulting in
a large number of observations being rejected unnecessarily. This secondary threshold
was utilized when ten travel time observations had been rejected sequentially and was
based on the median of those rejected travel times. This threshold value was calculated
by multiplying the median by a multiplier. The actual value of this multiplier is not
important so long as it is large enough to accept the true link travel times that had been
rejected and small enough to reject travel times of exiting vehicles. For this research it
was found that a value of 1.8 for the secondary threshold values provides reasonable
results. After applying the secondary threshold, the primary threshold was updated with
those reevaluated travel times that were initially rejected.
The proportion of vehicles that carry transponders was found to be in the order of five
percent, while the average hourly traffic volumes on the test corridors were found to be
5,560 and 5,380 for the I-10 and US-290 corridors, respectively. Over the analysis period,
a total of 84,930 observations were obtained from 1,791 individual commuters for the I-
10 test section and 99,080 observations from 1,388 individual commuters for the US-290
test section.
IDENTIFICATION OF REGULAR COMMUTERS
The anonymous AVI identification numbers made it possible to determine how
frequently each of the commuters made a trip along the test corridors. Figure 4.2 shows a
graph of the number of commuters as a function of the number of trips completed
between the first and last AVI stations. This figure shows that the trend is smooth and
decreasing. The function that best represents the data was found to be a combined
quadratic and negative exponential distribution. The equations, with R2 values of 0.993
and 0.996 for the I-10 and US-290 corridors, respectively, are shown in Figure 4.2.
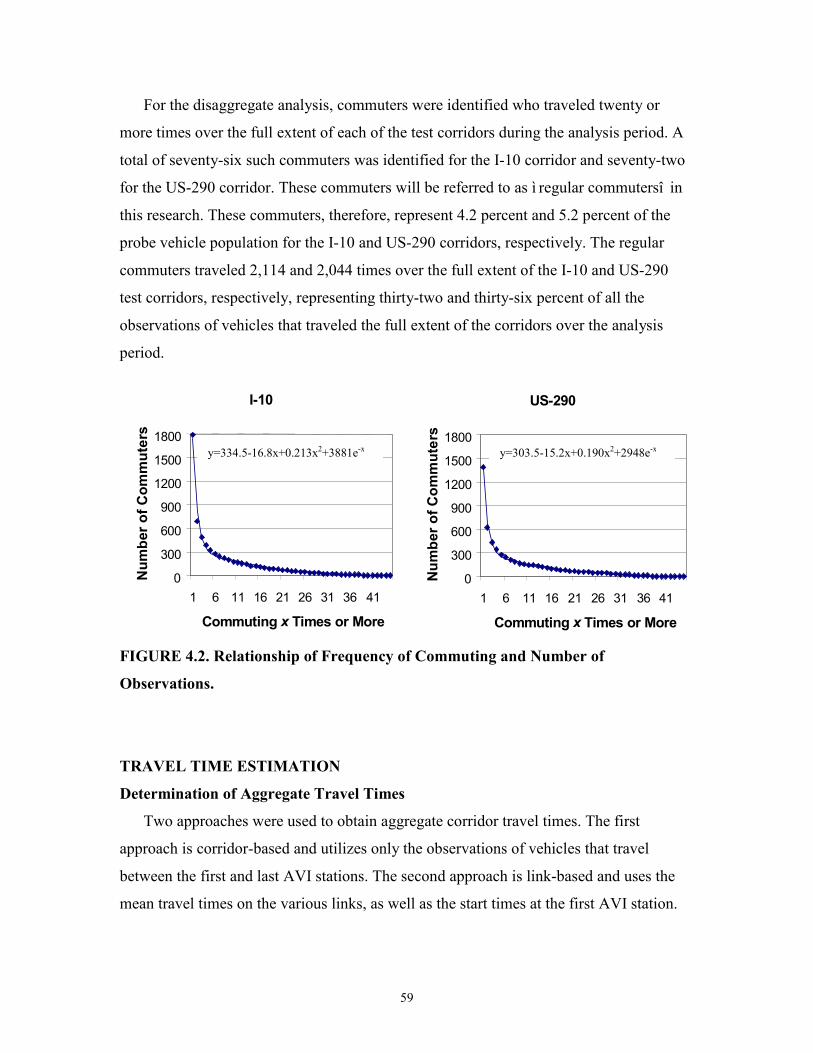
59
For the disaggregate analysis, commuters were identified who traveled twenty or
more times over the full extent of each of the test corridors during the analysis period. A
total of seventy-six such commuters was identified for the I-10 corridor and seventy-two
for the US-290 corridor. These commuters will be referred to as ì regular commutersî in
this research. These commuters, therefore, represent 4.2 percent and 5.2 percent of the
probe vehicle population for the I-10 and US-290 corridors, respectively. The regular
commuters traveled 2,114 and 2,044 times over the full extent of the I-10 and US-290
test corridors, respectively, representing thirty-two and thirty-six percent of all the
observations of vehicles that traveled the full extent of the corridors over the analysis
period.
FIGURE 4.2. Relationship of Frequency of Commuting and Number of
Observations.
TRAVEL TIME ESTIMATION
Determination of Aggregate Travel Times
Two approaches were used to obtain aggregate corridor travel times. The first
approach is corridor-based and utilizes only the observations of vehicles that travel
between the first and last AVI stations. The second approach is link-based and uses the
mean travel times on the various links, as well as the start times at the first AVI station.
I-10
0
300
600
900
1200
1500
1800
1 6 11 16 21 26 31 36 41
Commuting x Times or More
Number of Com
muters
US-290
0
300
600
900
1200
1500
1800
1 6 11 16 21 26 31 36 41
Commuting x Times or More
Num
ber of Com
muters
y=334.5-16.8x+0.213x2+3881e-x y=303.5-15.2x+0.190x2+2948e-x

60
In terms of the corridor-based approach, the mean corridor travel time can be
computed as a function of time of day and for each day analyzed, as shown in Equation
4.1. This technique of aggregation will be referred to as the aggregation by day (ABD)
approach, because it is based on aggregate data for each day and corridor-entering time
interval. A further form of aggregation was obtained by combining the data from all the
days while still keeping the corridor-entering time intervals separate as illustrated with
Equation 4.2. This technique of aggregation will be referred to as the aggregation across
days (AAD) approach, because it is based on aggregate data over a number of days. It is
important to note that the latter approach has been adopted at a number of ITS
deployment sites.
cdtX = [ ]∑=
dtn
jcjdt
dt
Xn 1
1 (4.1)
ctX = [ ]∑∑= =
d dtn
d
n
jcjdt
t
Xn 1 1
1 (4.2)
where:
cdtX = Mean corridor travel time on day d and at time interval t
ctX = Mean corridor travel time at time interval t and across all days
Xcjdt = Corridor travel time for individual j on day d and time interval t
ndt = Total number of observations on day d and at time interval t
nt = Total number of observations in time interval t
nd = Total number of days that were analyzed
The second approach for estimating corridor travel times uses link travel times
because link travel times typically are the only information that is available. For ABD the
mean travel time on each link was calculated as a function of time of day for each day
analyzed. The corridor travel time was then estimated from the sample central moments
as proposed by Fu and Rilett (89). This process involves the accumulation of link travel

61
times over the different time periods and for the different days. The time-dependent link
travel time is modeled as a discrete step function. The arrival time at an AVI station falls
into a specific time period, and the average link travel time of that period is then added to
the current travel time in order to predict the arrival time at the next AVI station. This
process is repeated for all the links along the corridor to yield the total corridor travel
time. The recursive formula used to calculate mean corridor travel times for the ABD
approach is shown as Equation 4.3. The mean corridor travel time for the AAD approach
can also be determined with Equation 4.3, but mean travel times computed across days
should be used instead of computed by days.
( )∑=
−=jn
jjnj
jcdt TT
nX
11
1 (4.3)
jT1 = Corridor-entering time of vehicle j;
1112 dtjj XTT += ; 2223 dtjj XTT += Ö .,
1)1()1( −−− +=ndtnjnnj XTT
where:
Xcdt = Mean corridor travel time on day d and time interval t
11dtX = Mean travel time on link 1 on day d and time interval 1t
njjj TTT ,..,, 21 = Arrival times at AVI stations 1, 2,Ö , n for vehicle j
nttt ,....,, 21 = Time intervals associated with arrival times njjj TTT ,..,, 21
In order to obtain homogeneous samples, it was necessary to apply two constraints to
the database. The first constraint states that only observations of vehicles that traversed
the full extent of the corridors could be used, whereas the second constraint states that
only trips that were observed at each of the AVI stations along the corridors could be
used. Based on these constraints, sample sizes of 4,861 for I-10 and 3,943 for US-290
were obtained over the analysis period. Both the corridor-based and the link-based
approaches were used to determine the ABD and AAD travel time estimates for the two
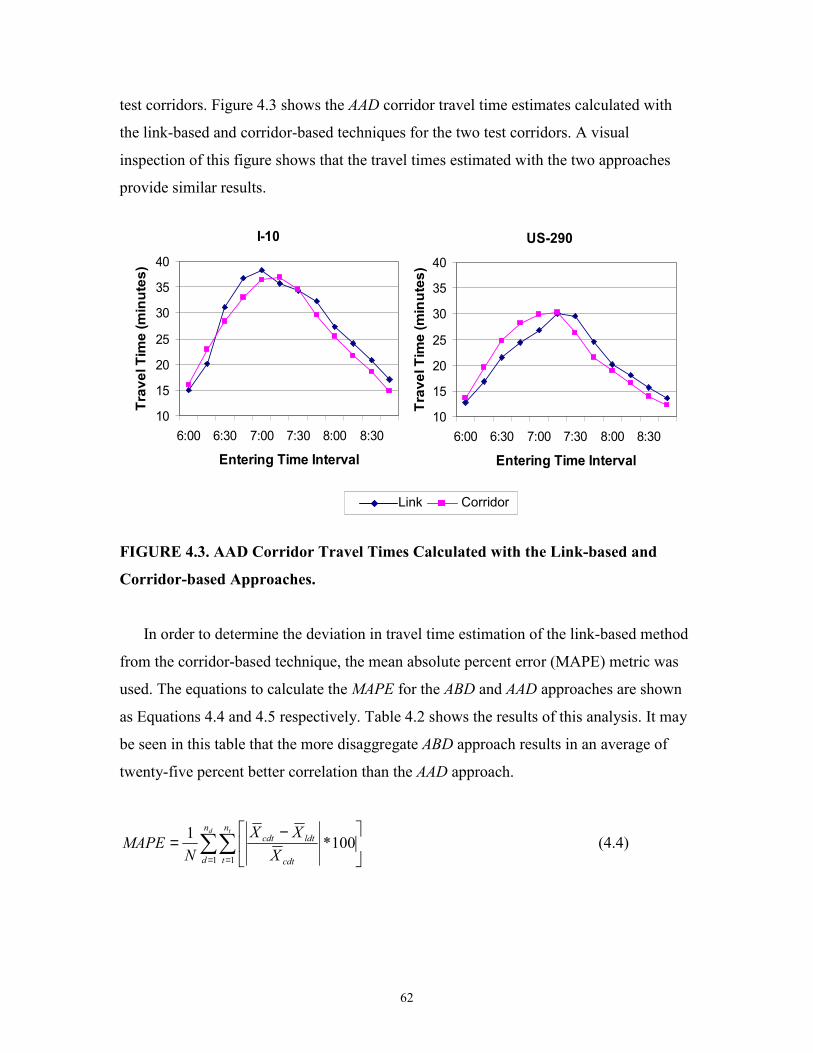
62
test corridors. Figure 4.3 shows the AAD corridor travel time estimates calculated with
the link-based and corridor-based techniques for the two test corridors. A visual
inspection of this figure shows that the travel times estimated with the two approaches
provide similar results.
FIGURE 4.3. AAD Corridor Travel Times Calculated with the Link-based and
Corridor-based Approaches.
In order to determine the deviation in travel time estimation of the link-based method
from the corridor-based technique, the mean absolute percent error (MAPE) metric was
used. The equations to calculate the MAPE for the ABD and AAD approaches are shown
as Equations 4.4 and 4.5 respectively. Table 4.2 shows the results of this analysis. It may
be seen in this table that the more disaggregate ABD approach results in an average of
twenty-five percent better correlation than the AAD approach.
∑∑= =
−=
d tn
d
n
t cdt
ldtcdt
XXX
NMAPE
1 1100*1 (4.4)
I-10
10
15
20
25
30
35
40
6:00 6:30 7:00 7:30 8:00 8:30
Entering Time Interval
Travel Time (minutes)
US-290
10
15
20
25
30
35
40
6:00 6:30 7:00 7:30 8:00 8:30
Entering Time Interval
Travel Time (minutes)
Link Corridor
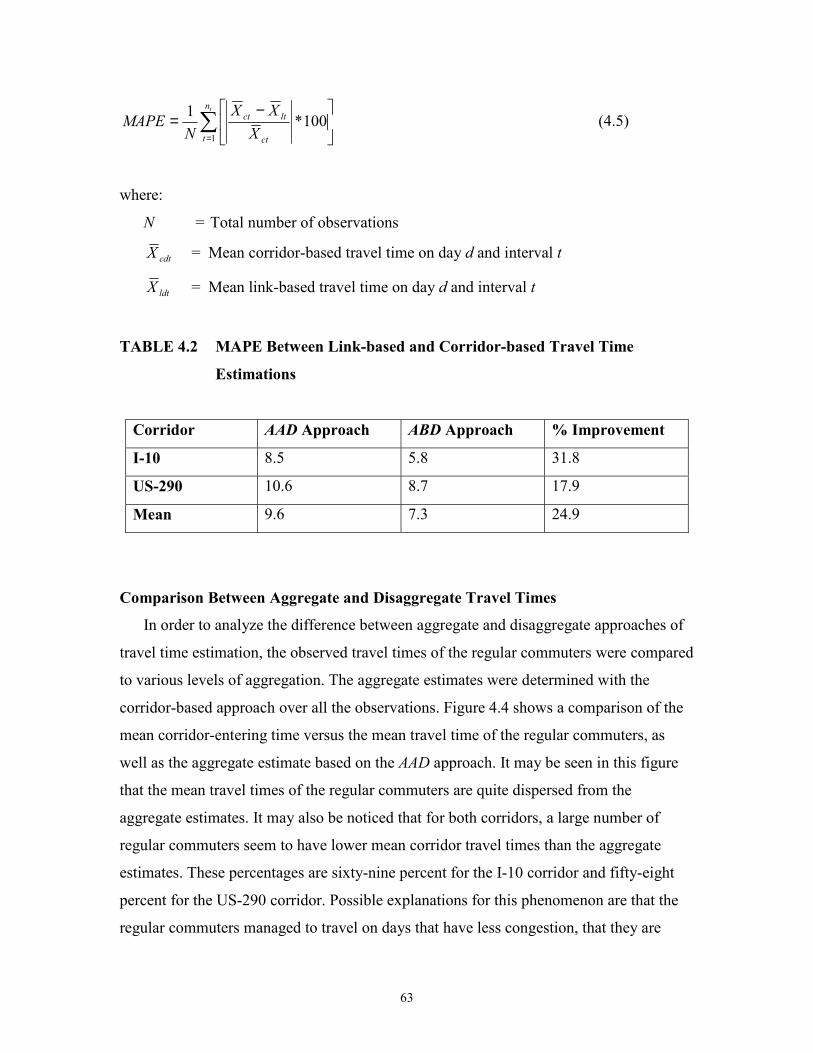
63
∑=
−=
tn
t ct
ltct
XXX
NMAPE
1100*1 (4.5)
where:
N = Total number of observations
cdtX = Mean corridor-based travel time on day d and interval t
ldtX = Mean link-based travel time on day d and interval t
TABLE 4.2 MAPE Between Link-based and Corridor-based Travel Time
Estimations
Corridor AAD Approach ABD Approach % Improvement
I-10 8.5 5.8 31.8
US-290 10.6 8.7 17.9
Mean 9.6 7.3 24.9
Comparison Between Aggregate and Disaggregate Travel Times
In order to analyze the difference between aggregate and disaggregate approaches of
travel time estimation, the observed travel times of the regular commuters were compared
to various levels of aggregation. The aggregate estimates were determined with the
corridor-based approach over all the observations. Figure 4.4 shows a comparison of the
mean corridor-entering time versus the mean travel time of the regular commuters, as
well as the aggregate estimate based on the AAD approach. It may be seen in this figure
that the mean travel times of the regular commuters are quite dispersed from the
aggregate estimates. It may also be noticed that for both corridors, a large number of
regular commuters seem to have lower mean corridor travel times than the aggregate
estimates. These percentages are sixty-nine percent for the I-10 corridor and fifty-eight
percent for the US-290 corridor. Possible explanations for this phenomenon are that the
regular commuters managed to travel on days that have less congestion, that they are
64
more familiar with the traffic patterns and, therefore, manage to achieve shorter travel
times, or that they mostly occupy the faster left lane because they are through traffic.
FIGURE 4.4. Mean Travel Times of Regular Commuters and Aggregate Estimates.
A further comparison was made between the AAD estimates and the actual travel
times of the regular commuters. For illustration purposes, Figure 4.5 shows the
comparison of the aggregate estimate and the individual travel times for vehicles 1 to 4
on the I-10 corridor. It may be noticed in this figure that vehicle 1 has a wide range of
corridor-entering times and its travel times are quite different to the aggregate estimates.
Vehicles 2 and 4 have fairly tight corridor entry times and their travel times are more
closely related to the aggregate estimates. Vehicle 3 also has a fairly tight corridor entry
time, but its travel times are very different to the aggregate estimates.
I-10
10
15
20
25
30
35
40
6 6:30 7 7:30 8 8:30 9
Mean Entering Time
Mean Travel Time
US-290
10
15
20
25
30
35
40
6 6:30 7 7:30 8 8:30 9
Mean Entering TimeMean Travel Time
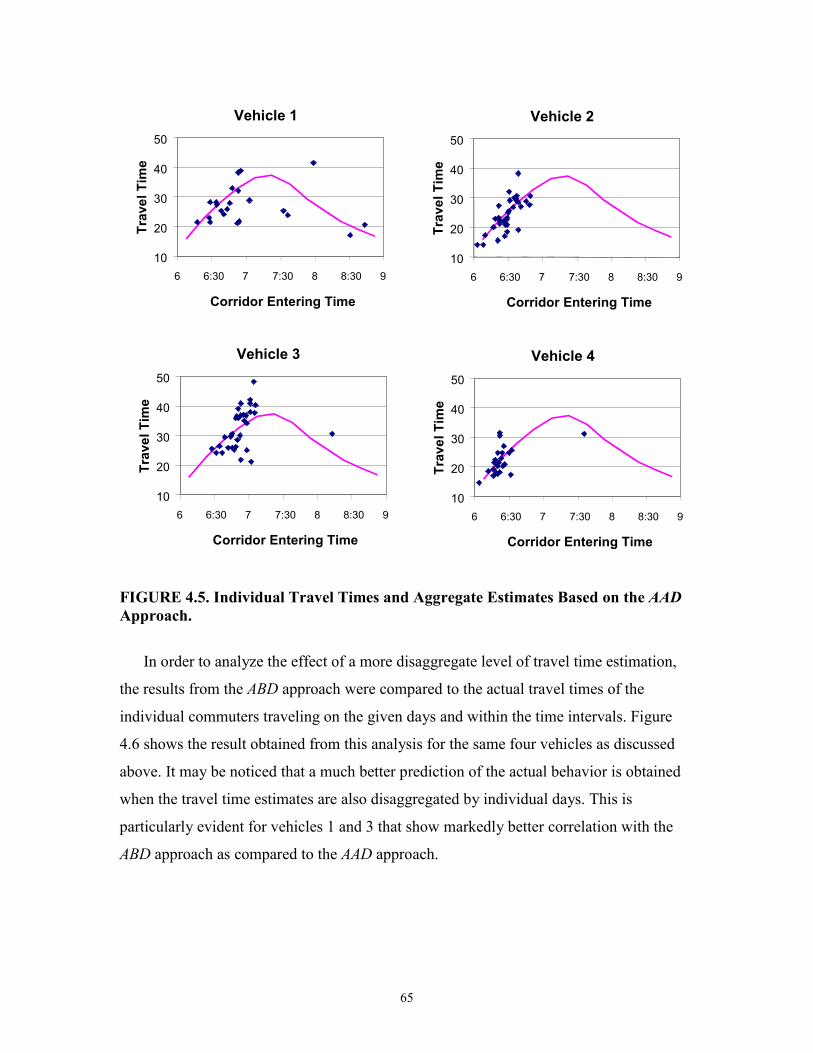
65
FIGURE 4.5. Individual Travel Times and Aggregate Estimates Based on the AAD Approach.
In order to analyze the effect of a more disaggregate level of travel time estimation,
the results from the ABD approach were compared to the actual travel times of the
individual commuters traveling on the given days and within the time intervals. Figure
4.6 shows the result obtained from this analysis for the same four vehicles as discussed
above. It may be noticed that a much better prediction of the actual behavior is obtained
when the travel time estimates are also disaggregated by individual days. This is
particularly evident for vehicles 1 and 3 that show markedly better correlation with the
ABD approach as compared to the AAD approach.
Vehicle 1
10
20
30
40
50
6 6:30 7 7:30 8 8:30 9
Corridor Entering Time
Travel Time
Vehicle 2
10
20
30
40
50
6 6:30 7 7:30 8 8:30 9
Corridor Entering Time
Travel Time
Vehicle 3
10
20
30
40
50
6 6:30 7 7:30 8 8:30 9
Corridor Entering Time
Travel Time
Vehicle 4
10
20
30
40
50
6 6:30 7 7:30 8 8:30 9
Corridor Entering Time
Travel Time
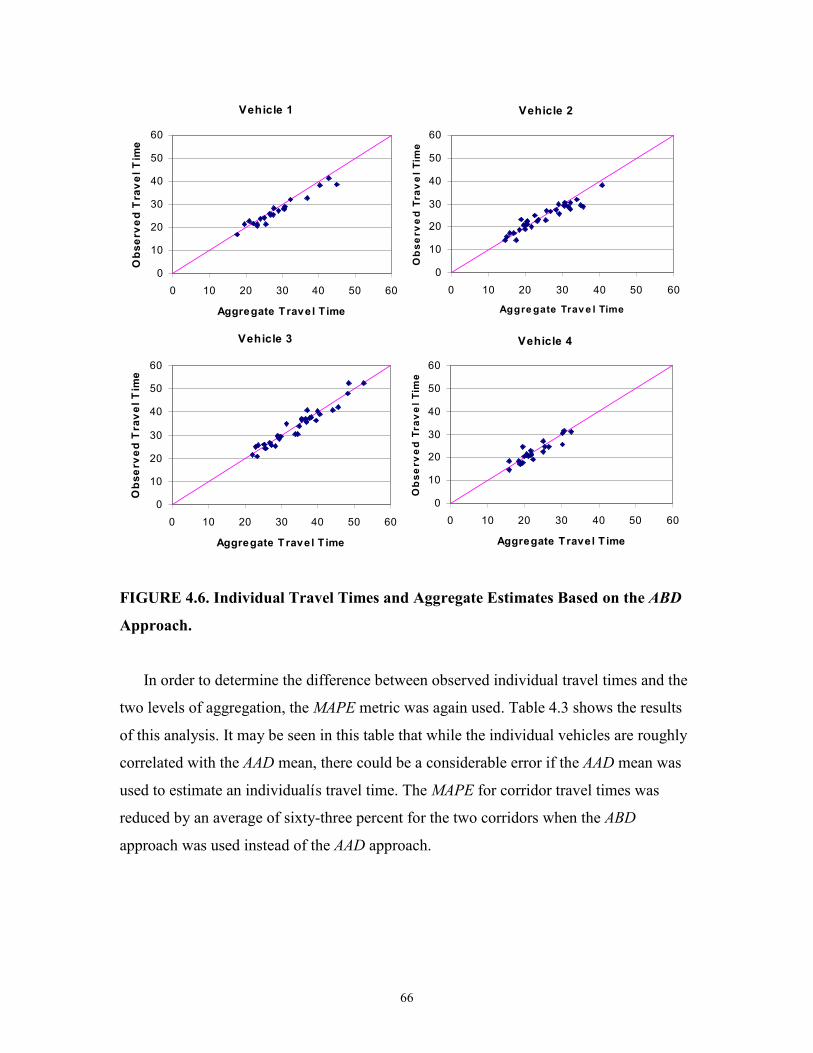
66
FIGURE 4.6. Individual Travel Times and Aggregate Estimates Based on the ABD
Approach.
In order to determine the difference between observed individual travel times and the
two levels of aggregation, the MAPE metric was again used. Table 4.3 shows the results
of this analysis. It may be seen in this table that while the individual vehicles are roughly
correlated with the AAD mean, there could be a considerable error if the AAD mean was
used to estimate an individualís travel time. The MAPE for corridor travel times was
reduced by an average of sixty-three percent for the two corridors when the ABD
approach was used instead of the AAD approach.
Vehicle 1
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Aggregate Travel Time
Observed Travel Time
Vehicle 2
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Aggregate Trave l Time
Observed Travel Time
Vehicle 3
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Aggregate Travel Time
Observed Travel Time
Vehicle 4
0
10
20
30
40
50
60
0 10 20 30 40 50 60
Aggregate Travel T ime
Observed
Travel Time

67
TABLE 4.3 MAPE Between Individual Observations and the Two Levels of Aggregation
Corridor AAD Approach ABD Approach % Improvement
I-10 17.8 7.0 60.7
US-290 18.5 6.3 65.9
Mean 18.2 6.7 63.3
Even though the improvement in accuracy is considerable when the effect of the
individual days are considered, it is necessary to assess whether travel times of individual
commuters are statistically different to this level of aggregation. An estimate of the
relationship between the observed travel times and the aggregate estimates, based on the
ABD approach, was performed with linear regression equations for each of the regular
commuters. The conclusion from this analysis is that the travel times of approximately
forty percent of the regular commuters are statistically different from the aggregate
estimate that is based on the ABD approach. This result has important implications for
both Advanced Traveler Information Systems (ATIS) and sustainability analyses because
it emphasizes the uniqueness of individual commutersí travel patterns and the benefit of
conducting analyses at the level of the individual commuter.
ESTIMATION OF TRAVEL TIME VARIABILITY Determination of Aggregate Travel Time Variability
Aggregate corridor travel time variability can, as in the case of aggregate corridor
travel times, be estimated on both a corridor and a link-basis. The same homogeneous
samples, which were developed for comparing link and corridor-based travel time
estimation, were used for comparing link and corridor-based travel time variability. The
variance of corridor travel times could be computed for the ABD approach and the AAD
approach by using Equations 4.6 and 4.7, respectively.
2ccdtS = [ ]∑
=
−−
dtn
jcdtcdtj
dt
XXn 1
2
)1(1 (4.6)

68
2cctS = [ ]∑∑
= =
−−
d dtn
d
n
jcdtcdtj
t
XXn 1 1
2
)1(1 (4.7)
where:
2ccdtS = Travel time variance for the corridor on day d and at time interval t
computed with the corridor-based approach
2cctS = Travel time variance for the corridor at time interval t computed
with the corridor-based approach
The second approach for determining corridor travel time variability is the link-based
approach. In this approach it can be assumed either that travel times between the links are
independent or that they are dependent. Equation 4.8 shows how corridor travel time
variability can be determined for the ABD approach, when travel times between the links
are assumed to be independent. Equation 4.9 shows the case when dependence is
assumed and Equation 4.10 shows how the covariance term is computed. The link-based
travel time variance of the AAD approach can also be computed with Equations 4.8 to
4.10, but the standard deviation and travel time terms should be computed across days,
instead of by days.
2lcdtS = 2
1dtS + 22dtS +Ö Ö .+ 2
ndtS (4.8)
2lcdtS = 2
1dtS + 22dtS +Ö Ö .+ 2
ndtS + ∑ ∑−
= +=
1
1 1
),(2l ln
a
n
abbdtadt XXCov (4.9)
)()()1(
1),(1
bdtjbdt
n
jadtjadt
dtbdtadt XXXX
nXXCov
dt
−−−
= ∑=
(4.10)
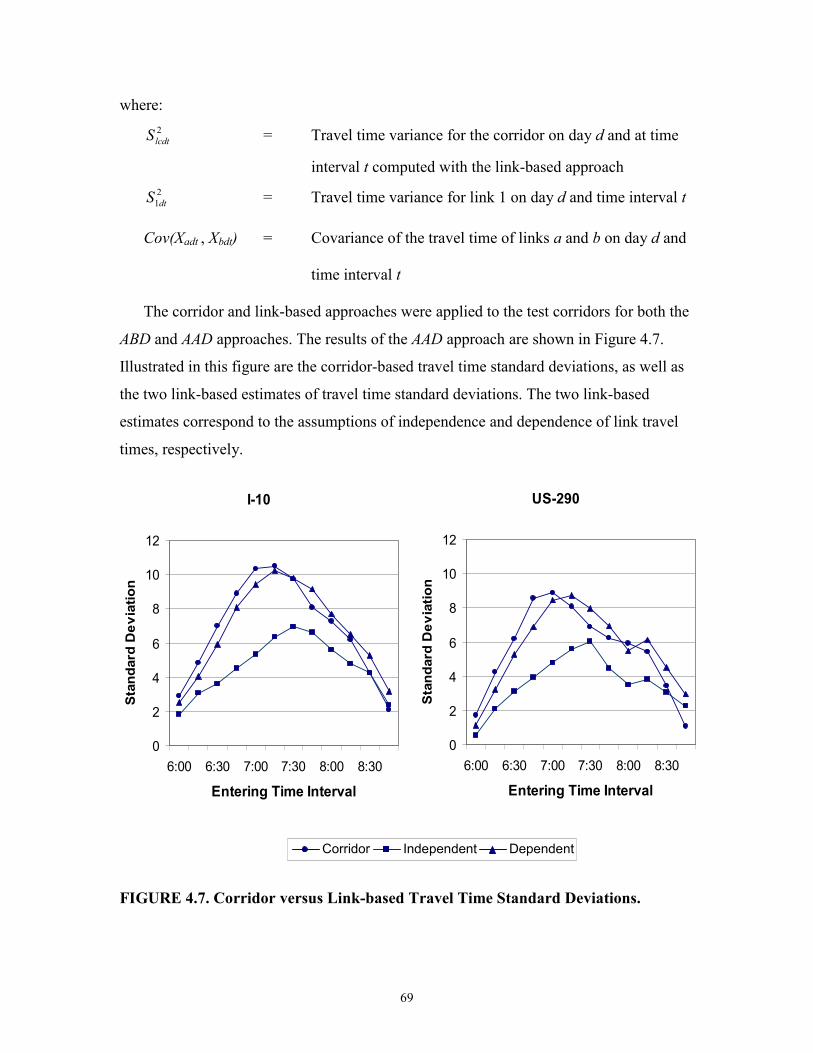
69
where:
2lcdtS = Travel time variance for the corridor on day d and at time
interval t computed with the link-based approach
21dtS = Travel time variance for link 1 on day d and time interval t
Cov(Xadt , Xbdt) = Covariance of the travel time of links a and b on day d and
time interval t
The corridor and link-based approaches were applied to the test corridors for both the
ABD and AAD approaches. The results of the AAD approach are shown in Figure 4.7.
Illustrated in this figure are the corridor-based travel time standard deviations, as well as
the two link-based estimates of travel time standard deviations. The two link-based
estimates correspond to the assumptions of independence and dependence of link travel
times, respectively.
FIGURE 4.7. Corridor versus Link-based Travel Time Standard Deviations.
I-10
0
2
4
6
8
10
12
6:00 6:30 7:00 7:30 8:00 8:30
Entering Time Interval
Standard Deviation
US-290
0
2
4
6
8
10
12
6:00 6:30 7:00 7:30 8:00 8:30
Entering Time Interval
Standard Deviation
Corridor Independent Dependent
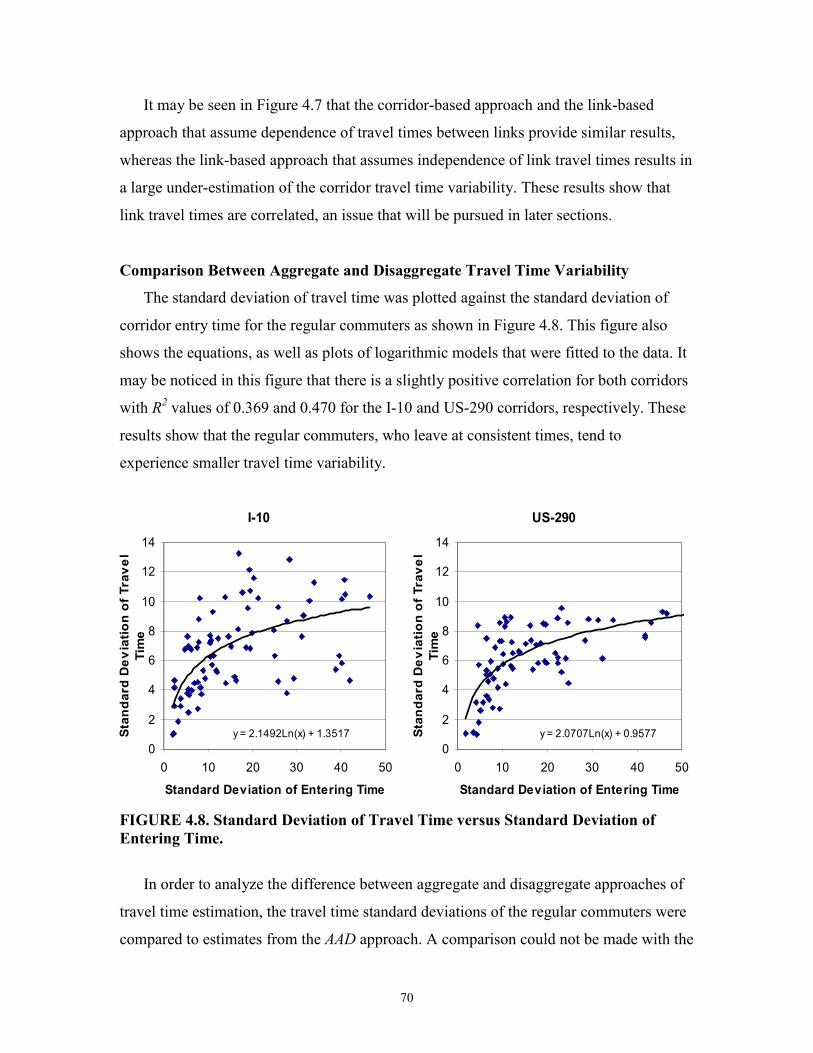
70
It may be seen in Figure 4.7 that the corridor-based approach and the link-based
approach that assume dependence of travel times between links provide similar results,
whereas the link-based approach that assumes independence of link travel times results in
a large under-estimation of the corridor travel time variability. These results show that
link travel times are correlated, an issue that will be pursued in later sections.
Comparison Between Aggregate and Disaggregate Travel Time Variability
The standard deviation of travel time was plotted against the standard deviation of
corridor entry time for the regular commuters as shown in Figure 4.8. This figure also
shows the equations, as well as plots of logarithmic models that were fitted to the data. It
may be noticed in this figure that there is a slightly positive correlation for both corridors
with R2 values of 0.369 and 0.470 for the I-10 and US-290 corridors, respectively. These
results show that the regular commuters, who leave at consistent times, tend to
experience smaller travel time variability.
FIGURE 4.8. Standard Deviation of Travel Time versus Standard Deviation of Entering Time.
In order to analyze the difference between aggregate and disaggregate approaches of
travel time estimation, the travel time standard deviations of the regular commuters were
compared to estimates from the AAD approach. A comparison could not be made with the
I-10
y = 2.1492Ln(x) + 1.35170
2
4
6
8
10
12
14
0 10 20 30 40 50
Standard Deviation of Entering Time
Standard Deviation of Travel
Time
US-290
y = 2.0707Ln(x) + 0.95770
2
4
6
8
10
12
14
0 10 20 30 40 50
Standard Deviation of Entering Time
Standard Deviation of Travel
Time
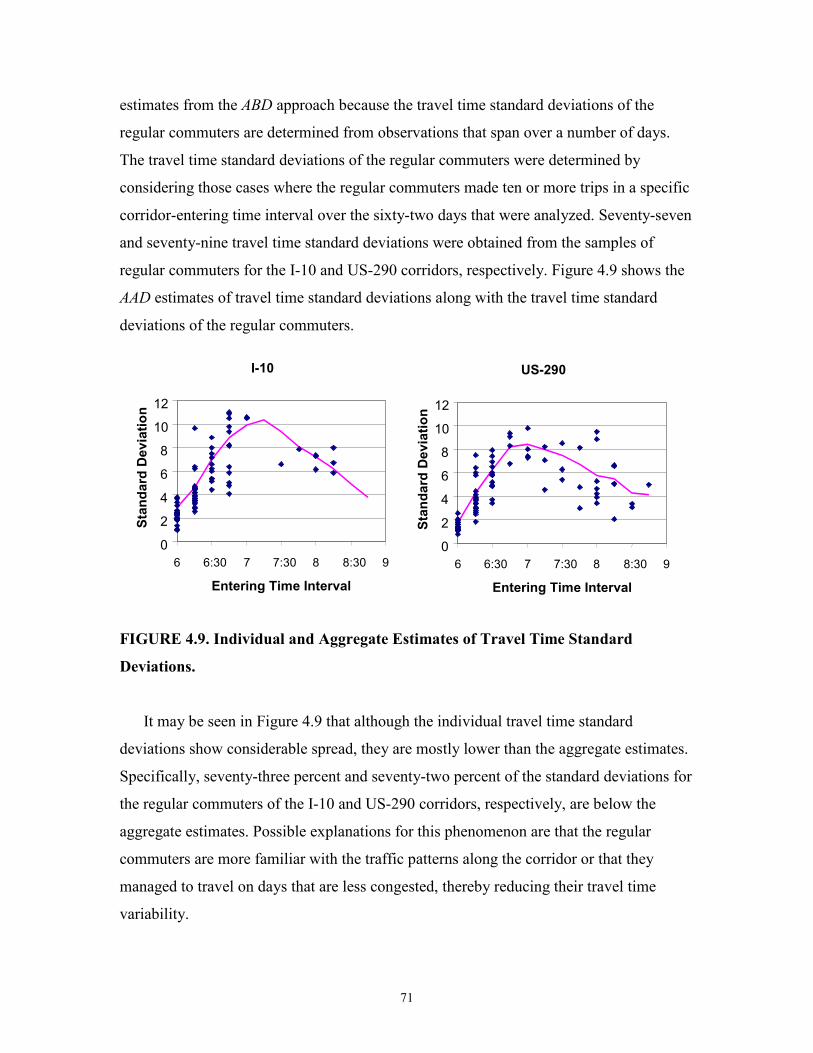
71
estimates from the ABD approach because the travel time standard deviations of the
regular commuters are determined from observations that span over a number of days.
The travel time standard deviations of the regular commuters were determined by
considering those cases where the regular commuters made ten or more trips in a specific
corridor-entering time interval over the sixty-two days that were analyzed. Seventy-seven
and seventy-nine travel time standard deviations were obtained from the samples of
regular commuters for the I-10 and US-290 corridors, respectively. Figure 4.9 shows the
AAD estimates of travel time standard deviations along with the travel time standard
deviations of the regular commuters.
FIGURE 4.9. Individual and Aggregate Estimates of Travel Time Standard
Deviations.
It may be seen in Figure 4.9 that although the individual travel time standard
deviations show considerable spread, they are mostly lower than the aggregate estimates.
Specifically, seventy-three percent and seventy-two percent of the standard deviations for
the regular commuters of the I-10 and US-290 corridors, respectively, are below the
aggregate estimates. Possible explanations for this phenomenon are that the regular
commuters are more familiar with the traffic patterns along the corridor or that they
managed to travel on days that are less congested, thereby reducing their travel time
variability.
I-10
0
2
4
6
8
10
12
6 6:30 7 7:30 8 8:30 9
Entering Time Interval
Standard Deviation
US-290
0
2
4
6
8
10
12
6 6:30 7 7:30 8 8:30 9
Entering Time Interval
Standard Deviation

72
The MAPE metric was again used to compare the differences between the aggregate
estimate of travel time variability that is based on the AAD approach and the observed
travel time variability of the regular commuters. The MAPEs for the I-10 and US-290
corridors were found to be very similar, namely 32.2 percent for the I-10 corridor and
32.5 percent for the US-290 corridor. These results show that there is a considerable error
associated with estimating travel time variability of individual commuters with the AAD
approach.
The statistical differences between the travel time standard deviations of the regular
commuters and the aggregate estimates based on the ABD approach were modeled as
linear regression equations. The standard deviations of the regular commuters were again
determined by considering those cases where they traveled the full extent of the corridor
ten or more times during a particular corridor-entering time interval. For developing
linear regression equations, only cases were considered that had three or more data
points. The results from the tests indicated that the null hypothesis could be rejected for
twenty percent of the days for the I-10 corridor and 15.4 percent of the days for the US-
290 corridor. This implies that for an average of approximately twenty percent of the
cases the travel time standard deviations of the regular commuters are statistically
different to the ABD estimates at the ninety-five percent level of confidence.
LINK-BASED COMPARISON
Aggregate Link-Based Travel Time Correlation
The preliminary analysis indicated that the AVI link travel times are correlated. In
order to do a thorough test of this hypothesis, the sample correlation coefficients between
the links were determined. The correlation coefficient between two links is directly
related to the covariance between the links and can be formulated for the ABD approach
as shown in Equation 4.11. The correlation coefficient for the AAD approach can also be
computed with Equation 4.11 but the travel time terms should be computed across days
instead of by days.
73
∑ ∑
∑
= =
=
−−
−−=
dt dt
dt
n
i
n
ibdtibdtadtiadt
n
ibdtibdtadtiadt
dt
XXXX
XXXXbaR
1 1
22
1
)()(
))((),( (4.11)
where:
Rdt(a, b = The sample correlation coefficient between links a and b on
day d and in time interval t
iadtX = Travel time for observation i on link a on day d and time interval t
In order to determine the correlation coefficients between the various link
combinations, the homogeneous samples were again used that only contain vehicles that
traveled the full extent of the corridors and that were detected at each of the AVI stations
on the corridors. Both the AAD and ABD approaches were applied to determine
correlation coefficients between all the link combinations of the two test corridors. The
conclusions from the two approaches are very similar and, for illustration purposes, only
the results from the AAD approach are discussed in this section.
It was found that travel times between links are almost all positively correlated. Only
4.2 percent of the cases for the I-10 corridor and only 5.8 percent of the cases for the US-
290 corridor showed negative correlations. Figure 4.10 shows the average correlation
coefficients between the various link combinations of the I-10 and US-290 corridors. It
may be seen in this figure that the highest correlation was found between adjacent links,
with correlation decreasing, as the distance between the link combination increased. The
range of the average correlation coefficients for the I-10 corridor is between 0.21 for link
combination 1 and 4 and 0.53 for link combination 1 and 2. The range for the US-290
corridor is between 0.12 for link combination 1 and 5 and 0.68 for link combination 4 and
5.
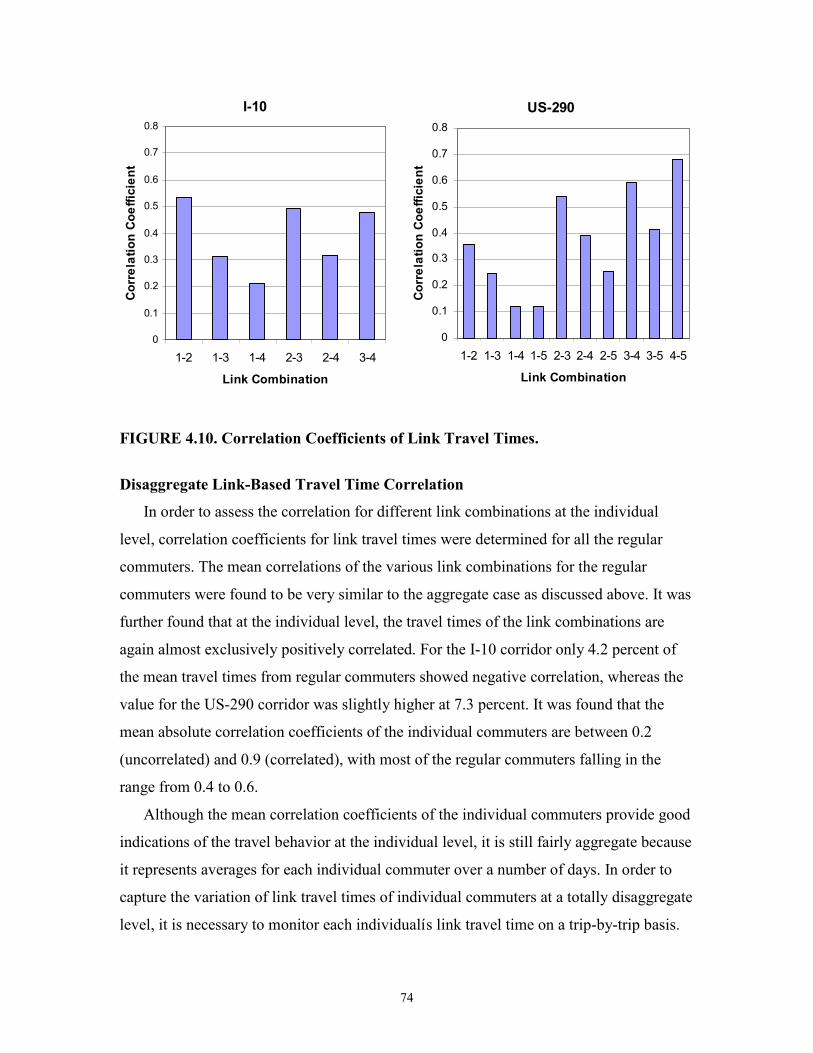
74
FIGURE 4.10. Correlation Coefficients of Link Travel Times.
Disaggregate Link-Based Travel Time Correlation
In order to assess the correlation for different link combinations at the individual
level, correlation coefficients for link travel times were determined for all the regular
commuters. The mean correlations of the various link combinations for the regular
commuters were found to be very similar to the aggregate case as discussed above. It was
further found that at the individual level, the travel times of the link combinations are
again almost exclusively positively correlated. For the I-10 corridor only 4.2 percent of
the mean travel times from regular commuters showed negative correlation, whereas the
value for the US-290 corridor was slightly higher at 7.3 percent. It was found that the
mean absolute correlation coefficients of the individual commuters are between 0.2
(uncorrelated) and 0.9 (correlated), with most of the regular commuters falling in the
range from 0.4 to 0.6.
Although the mean correlation coefficients of the individual commuters provide good
indications of the travel behavior at the individual level, it is still fairly aggregate because
it represents averages for each individual commuter over a number of days. In order to
capture the variation of link travel times of individual commuters at a totally disaggregate
level, it is necessary to monitor each individualís link travel time on a trip-by-trip basis.
I-10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
1-2 1-3 1-4 2-3 2-4 3-4
Link Combination
Correlation Coefficient
US-290
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
1-2 1-3 1-4 1-5 2-3 2-4 2-5 3-4 3-5 4-5
Link Combination
Correlation Coefficient
75
This was achieved by comparing each individualís link travel time on a specific day and
within a specific time interval, with the aggregate estimates for that day and time interval.
It was found that the link travel times of individual commuters on a trip-by-trip basis are
not mostly positively correlated as the more aggregate approach suggested. One
hypothesis for this result is the fact that commuters have certain time budgets for
traveling a corridor. They would, therefore, compensate by traveling faster on subsequent
links after experiencing a slow link and vice versa. Another hypothesis is that the slow-
fast pattern along the corridor can be attributed to the effect of shock waves moving up
and down the corridor during congested conditions. In all likelihood the results are some
combination of these two effects.
More accurate estimates of the link-based speeds and travel times can have
implications for determining certain sustainability performance measures such as air
pollution, noise pollution, and fuel consumption.
CONCLUDING REMARKS
In this chapter the first phase (identification of performance measures) is performed at
the corridor level. Various mobility, reliability, air pollution, noise pollution, and energy
consumption measures were identified.
AVI data was used to determine travel time and travel time variability at the level of
the individual commuter, as well as two levels of aggregation, namely aggregation across
days (AAD) (i.e., without considering the effect of individual days) and aggregation by
days (ABD) (i.e., keeping the individual days separate). It was illustrated that corridor
travel times could be determined with link travel times through the use of a recursive step
function. The AAD approach was found to be sixty-three percent less accurate than the
ABD approach for determining individual travel times. Even though the latter technique
was found to be much more accurate, it was illustrated that forty percent of the regular
commutersí travel times are statistically different to these aggregate estimates. This result
has significant implications for sustainability analysis and ATIS applications because
aggregate estimates of travel time could be significantly different to what is actually
experienced by a large percentage of commuters. It is, therefore, essential to consider the
76
individual level when using ATIS techniques or conducting sustainability analysis at the
individual level.
In the case of travel time variability it was found that the variance of corridor travel
times could be determined, fairly accurately, using measured link variances and
covariances when dependence of link travel times is assumed. It was found that for an
average of approximately twenty percent of the cases the travel time standard deviations
of the regular commuters are statistically different to the ABD estimates. This result again
illustrates the benefit of conducting analyses at the level of the individual commuter.
On a link basis it was found that travel times between links are almost exclusively
positively correlated with only five percent of the observations indicating negative
correlations. Most of the regular commuters show a moderate level of correlation with the
majority of correlation coefficients for regular commuters falling in the range from 0.4 to
0.6. The results from analyzing link travel times of individual commuters on a trip-by-trip
basis, however, revealed that individual commuters show great variability in travel
behavior as evidenced by the fact that large tendencies to having both faster and slower
link travel times than the aggregate estimates were observed. The link travel times of
individual commuters on a trip-by-trip basis are, therefore, not mostly positively
correlated as the more aggregate approach suggested. More accurate estimates of
performance measures such as vehicular emissions, noise pollution, and fuel consumption
can, therefore, be made if analyses are conducted on the individual commuter level and
on a trip-by-trip basis.
It was found that a disaggregate approach will result in superior estimates of travel
time and travel time variability. This is important because sustainability analyses are to a
large extent reliant on estimates of these two important performance measures. The
following chapter describes how mobility related performance measures can be
quantified at various levels of aggregation by using the TRANSIMS model.
77
CHAPTER 5: MOBILITY RELATED PERFORMANCE MEASURES
This chapter focuses on the phases of database development and quantifying
performance measures. Observed travel information at the level of the individual
commuter, as can be obtained from AVI data, is often not available or extremely
expensive to obtain. The planner, therefore, often needs to resort to modeling techniques
to quantify performance measures for sustainable transportation at a disaggregate level.
In this chapter, a wide range of mobility and reliability related performance measures are
quantified at various levels of aggregation by using a traffic simulation model. Various
traffic simulation models are able to model the travel behavior of the individual
commuter. However, the TRANSIMS model was selected as simulation model for this
research because it represents the next generation of planning tools. It has the ability to
simulate the travel behavior of the individual commuter on a second-by-second basis and,
therefore, could be used to quantify performance measures for sustainable transportation
at various levels of aggregation. The CORSIM highway microsimulation model was used
to confirm some of the results obtained with TRANSIMS.
METHODS OF DISAGGREGATION
For a typical transportation system, a number of different types of disaggregation can
be considered, namely spatial, temporal, combined spatial and temporal, and the
individual level. The individual level can be used as a separate level of disaggregation or
in combination with spatial and/or temporal disaggregation. Spatial and temporal
disaggregation can each be applied at different levels of detail, which can be defined by
the segment lengths and time interval lengths, respectively. Figure 5.1 shows how the
different types of disaggregation are related. It may be seen in Figure 5.1 that there are
numerous possible combinations in which the types of disaggregation can be applied. The
eventual accuracy of the application depends on factors such as the type of
disaggregation that is applied, the level of detail used within each application, and the
underlying function of the performance measure that is under analysis. The following
sections describe the different types of disaggregation in more detail.
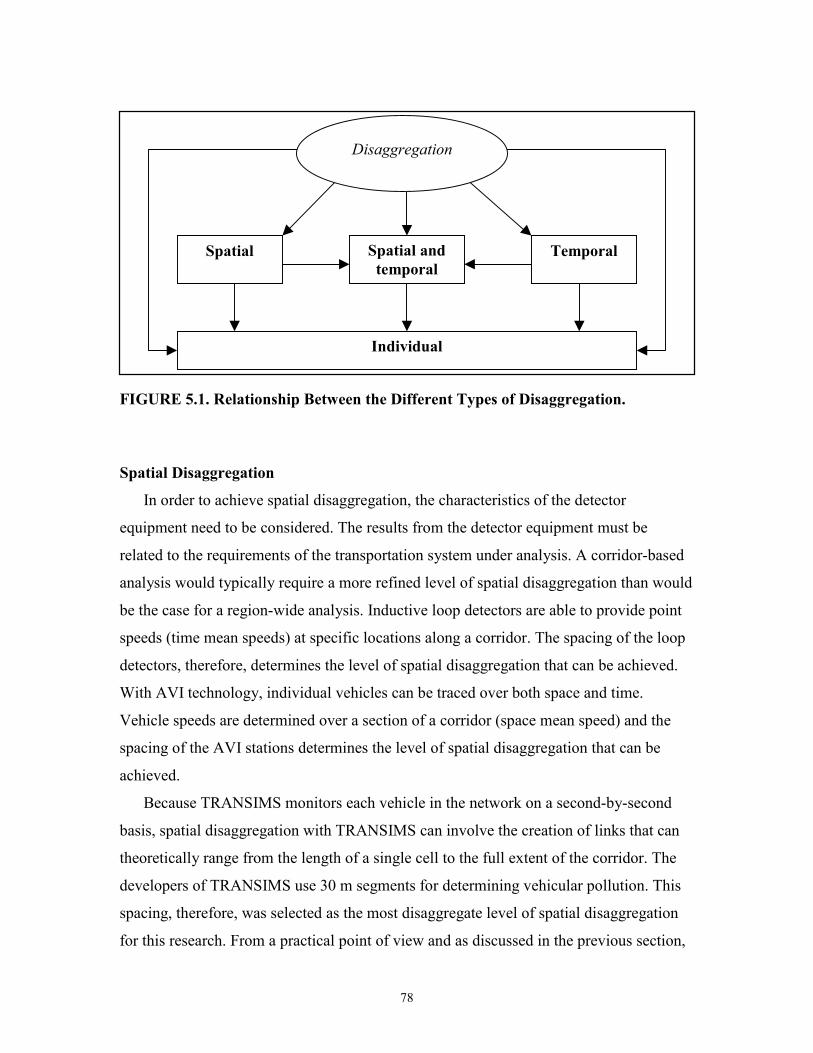
78
FIGURE 5.1. Relationship Between the Different Types of Disaggregation.
Spatial Disaggregation
In order to achieve spatial disaggregation, the characteristics of the detector
equipment need to be considered. The results from the detector equipment must be
related to the requirements of the transportation system under analysis. A corridor-based
analysis would typically require a more refined level of spatial disaggregation than would
be the case for a region-wide analysis. Inductive loop detectors are able to provide point
speeds (time mean speeds) at specific locations along a corridor. The spacing of the loop
detectors, therefore, determines the level of spatial disaggregation that can be achieved.
With AVI technology, individual vehicles can be traced over both space and time.
Vehicle speeds are determined over a section of a corridor (space mean speed) and the
spacing of the AVI stations determines the level of spatial disaggregation that can be
achieved.
Because TRANSIMS monitors each vehicle in the network on a second-by-second
basis, spatial disaggregation with TRANSIMS can involve the creation of links that can
theoretically range from the length of a single cell to the full extent of the corridor. The
developers of TRANSIMS use 30 m segments for determining vehicular pollution. This
spacing, therefore, was selected as the most disaggregate level of spatial disaggregation
for this research. From a practical point of view and as discussed in the previous section,
Spatial Spatial and temporal
Temporal
Individual
Disaggregation
79
the I-10 corridor could be spatially disaggregated into four AVI links or twenty-eight
interchange links. Similarly, the US-290 corridor could be spatially disaggregated into
five AVI links and twenty-four interchange links.
Temporal Disaggregation
Just as the travel characteristics of a corridor can be spatially disaggregated in terms
of links, it can also be temporally disaggregated in terms of time intervals. Temporal
disaggregation with TRANSIMS can involve the creation of time intervals that can
theoretically range from 1 s to the full extent of the analysis period. For comparison
purposes, the most disaggregate level of temporal disaggregation was chosen to be 10 s
intervals. More practical levels of temporal disaggregation could, for example, involve
the creation of twelve 5-min time intervals or four 15-min time intervals. In the case of
the test corridors, the highest level of temporal aggregation involves aggregation over the
whole analysis period.
Spatial and Temporal Disaggregation
It is also possible to conduct the analysis by disaggregating both spatially and
temporally. This approach has the potential of considerably reducing the total error as a
result of aggregation. Joint spatial and temporal disaggregation can also allow the analyst
to make the necessary trade-offs between aspects such as required accuracy, computing
time, and memory requirements by selecting the appropriate level of spatial and temporal
disaggregation.
Disaggregation Based on Individuals
Because TRANSIMS can trace the movement of each vehicle in the network, it is
possible to conduct analyses at the level of the individual vehicle. Another useful aspect
of data on the individual level is that it lends itself to the determination of mathematical
or statistical distributions. Histograms were prepared for the mean speeds of the
individual vehicles on each of the AVI links and for the two test corridors as a whole.
The shapes of the histograms for the AVI links indicate that the data tend to be normally
distributed, although fairly long tails to the right were observed for a number of links.
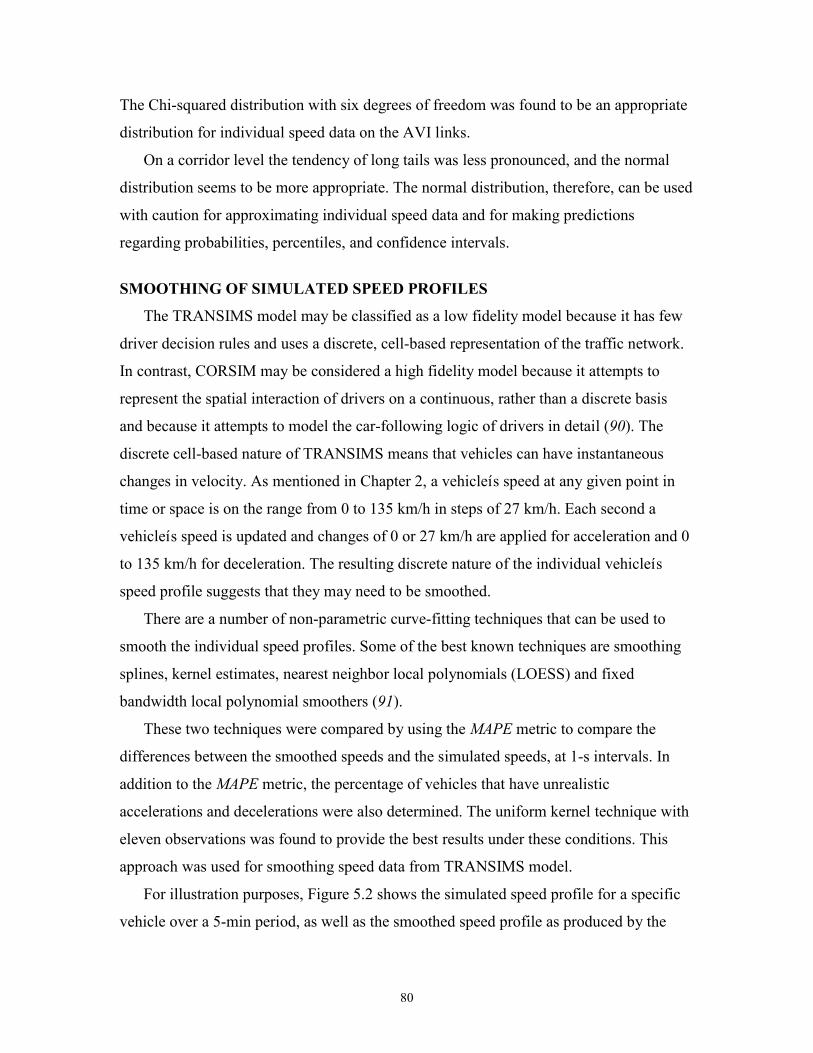
80
The Chi-squared distribution with six degrees of freedom was found to be an appropriate
distribution for individual speed data on the AVI links.
On a corridor level the tendency of long tails was less pronounced, and the normal
distribution seems to be more appropriate. The normal distribution, therefore, can be used
with caution for approximating individual speed data and for making predictions
regarding probabilities, percentiles, and confidence intervals.
SMOOTHING OF SIMULATED SPEED PROFILES
The TRANSIMS model may be classified as a low fidelity model because it has few
driver decision rules and uses a discrete, cell-based representation of the traffic network.
In contrast, CORSIM may be considered a high fidelity model because it attempts to
represent the spatial interaction of drivers on a continuous, rather than a discrete basis
and because it attempts to model the car-following logic of drivers in detail (90). The
discrete cell-based nature of TRANSIMS means that vehicles can have instantaneous
changes in velocity. As mentioned in Chapter 2, a vehicleís speed at any given point in
time or space is on the range from 0 to 135 km/h in steps of 27 km/h. Each second a
vehicleís speed is updated and changes of 0 or 27 km/h are applied for acceleration and 0
to 135 km/h for deceleration. The resulting discrete nature of the individual vehicleís
speed profile suggests that they may need to be smoothed.
There are a number of non-parametric curve-fitting techniques that can be used to
smooth the individual speed profiles. Some of the best known techniques are smoothing
splines, kernel estimates, nearest neighbor local polynomials (LOESS) and fixed
bandwidth local polynomial smoothers (91).
These two techniques were compared by using the MAPE metric to compare the
differences between the smoothed speeds and the simulated speeds, at 1-s intervals. In
addition to the MAPE metric, the percentage of vehicles that have unrealistic
accelerations and decelerations were also determined. The uniform kernel technique with
eleven observations was found to provide the best results under these conditions. This
approach was used for smoothing speed data from TRANSIMS model.
For illustration purposes, Figure 5.2 shows the simulated speed profile for a specific
vehicle over a 5-min period, as well as the smoothed speed profile as produced by the
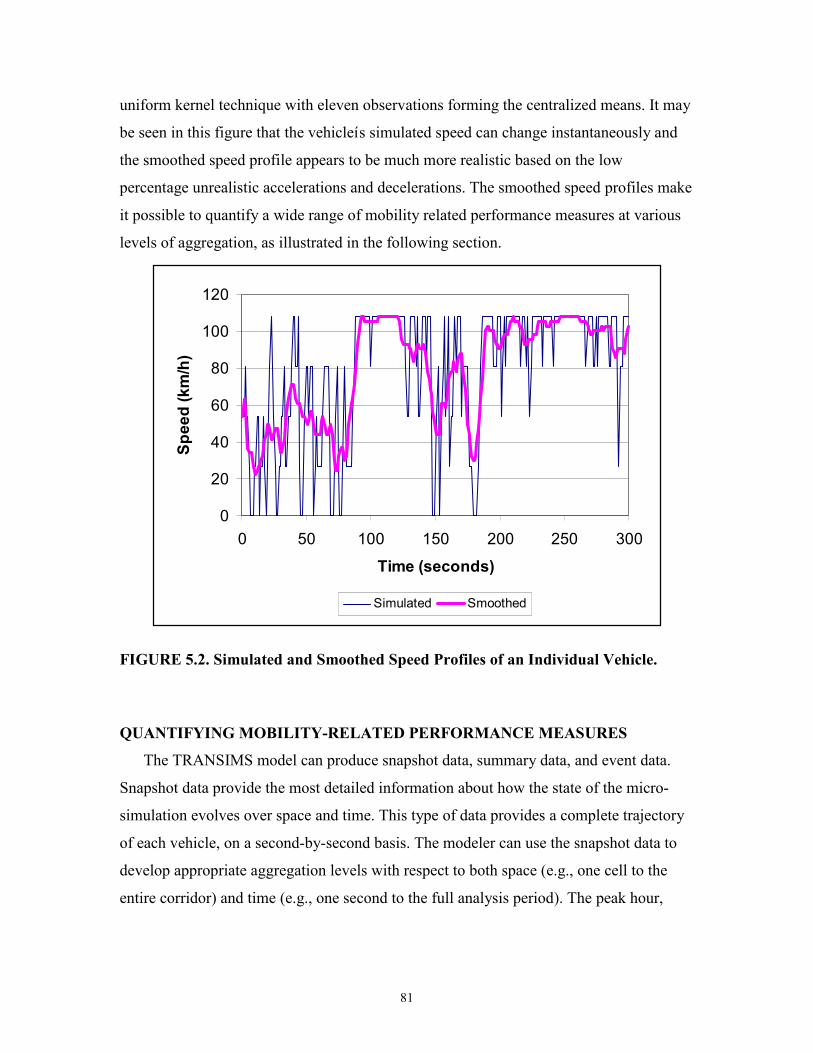
81
uniform kernel technique with eleven observations forming the centralized means. It may
be seen in this figure that the vehicleís simulated speed can change instantaneously and
the smoothed speed profile appears to be much more realistic based on the low
percentage unrealistic accelerations and decelerations. The smoothed speed profiles make
it possible to quantify a wide range of mobility related performance measures at various
levels of aggregation, as illustrated in the following section.
FIGURE 5.2. Simulated and Smoothed Speed Profiles of an Individual Vehicle.
QUANTIFYING MOBILITY-RELATED PERFORMANCE MEASURES
The TRANSIMS model can produce snapshot data, summary data, and event data.
Snapshot data provide the most detailed information about how the state of the micro-
simulation evolves over space and time. This type of data provides a complete trajectory
of each vehicle, on a second-by-second basis. The modeler can use the snapshot data to
develop appropriate aggregation levels with respect to both space (e.g., one cell to the
entire corridor) and time (e.g., one second to the full analysis period). The peak hour,
0
20
40
60
80
100
120
0 50 100 150 200 250 300
Time (seconds)
Speed (km/h)
Simulated Smoothed

82
which lasted from 7 a.m. to 8 a.m., was selected as analysis period with the TRANSIMS
model.
It was shown in Chapter 3 that traffic simulation models could be used to quantify
performance measures that address the sustainable transportation goals of maximizing
reliability and maximizing mobility. The TRANSIMS model is used to quantify the
reliability performance measure, namely travel time variability and the following
mobility related performance measures: i) travel time; ii) total delay; iii) travel rate; iv)
level of service; and v) percentage corridor congested. It was found that spatial
disaggregation at the level of interchange links and the temporal disaggregation at 5-min
time increments are both practical and fairly accurate levels for quantifying performance
measures. Both these levels of aggregation resulted in an eighty percent improvement in
speed estimation over the completely aggregate cases. These levels of disaggregation, as
well as the smoothed speed profiles, were, therefore, used for quantifying the various
mobility and reliability related performance measures.
Travel Time
As discussed in Chapter 4, travel time is a very important performance measure for
sustainable transportation analysis. It can be measured on a link basis, as well as over the
full extent of the corridor. The travel time over the full extent of the corridor is often of
most interest as a performance measure for sustainable transportation and can be
calculated by recording the difference between the corridor exiting and entering times as
shown in Equation 5.1.
Corridor travel time = entryexit tt − (5.1)
Figure 5.3 shows the mean travel times for the various corridor entering time
intervals. It may be seen in Figure 5.3 that the mean travel time for the I-10 corridor
shows an increasing trend, with the maximum travel time being reached at a corridor
entering time that occurs just before 8 a.m. The trend for the US-290 corridor, however,
is slightly decreasing over this period.
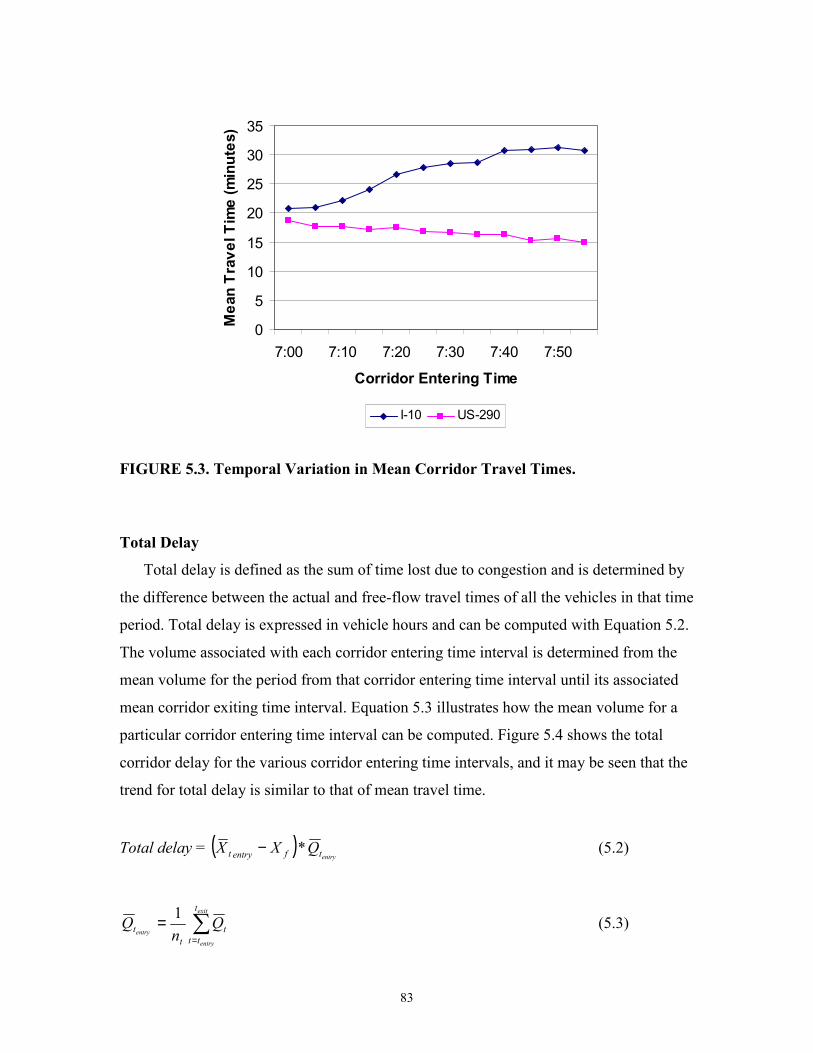
83
FIGURE 5.3. Temporal Variation in Mean Corridor Travel Times.
Total Delay
Total delay is defined as the sum of time lost due to congestion and is determined by
the difference between the actual and free-flow travel times of all the vehicles in that time
period. Total delay is expressed in vehicle hours and can be computed with Equation 5.2.
The volume associated with each corridor entering time interval is determined from the
mean volume for the period from that corridor entering time interval until its associated
mean corridor exiting time interval. Equation 5.3 illustrates how the mean volume for a
particular corridor entering time interval can be computed. Figure 5.4 shows the total
corridor delay for the various corridor entering time intervals, and it may be seen that the
trend for total delay is similar to that of mean travel time.
Total delay = ( )entrytfentryt QXX *− (5.2)
∑=
=exit
entry
entry
t
ttt
tt Q
nQ 1 (5.3)
0
5
10
15
20
25
30
35
7:00 7:10 7:20 7:30 7:40 7:50
Corridor Entering Time
Mean Travel Time (minutes)
I-10 US-290
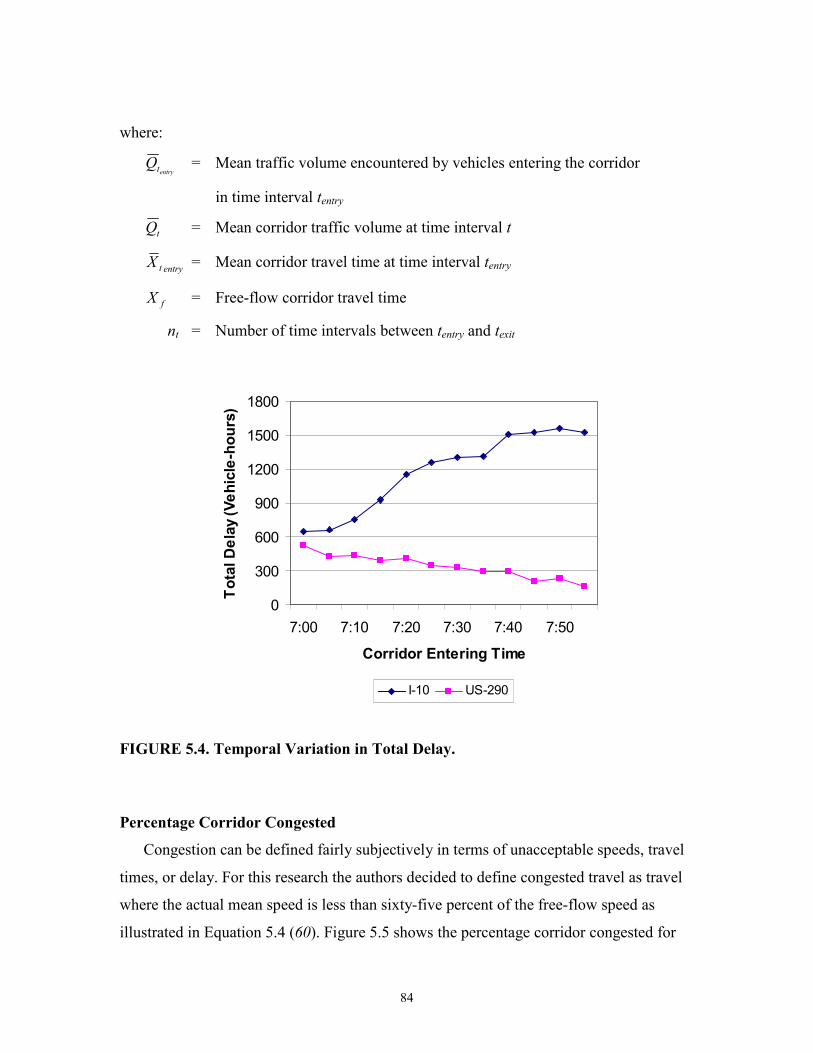
84
where:
entrytQ = Mean traffic volume encountered by vehicles entering the corridor
in time interval tentry
tQ = Mean corridor traffic volume at time interval t
entrytX = Mean corridor travel time at time interval tentry
fX = Free-flow corridor travel time
nt = Number of time intervals between tentry and texit
FIGURE 5.4. Temporal Variation in Total Delay.
Percentage Corridor Congested
Congestion can be defined fairly subjectively in terms of unacceptable speeds, travel
times, or delay. For this research the authors decided to define congested travel as travel
where the actual mean speed is less than sixty-five percent of the free-flow speed as
illustrated in Equation 5.4 (60). Figure 5.5 shows the percentage corridor congested for
0
300
600
900
1200
1500
1800
7:00 7:10 7:20 7:30 7:40 7:50
Corridor Entering Time
Total Delay (Vehicle-hours)
I-10 US-290
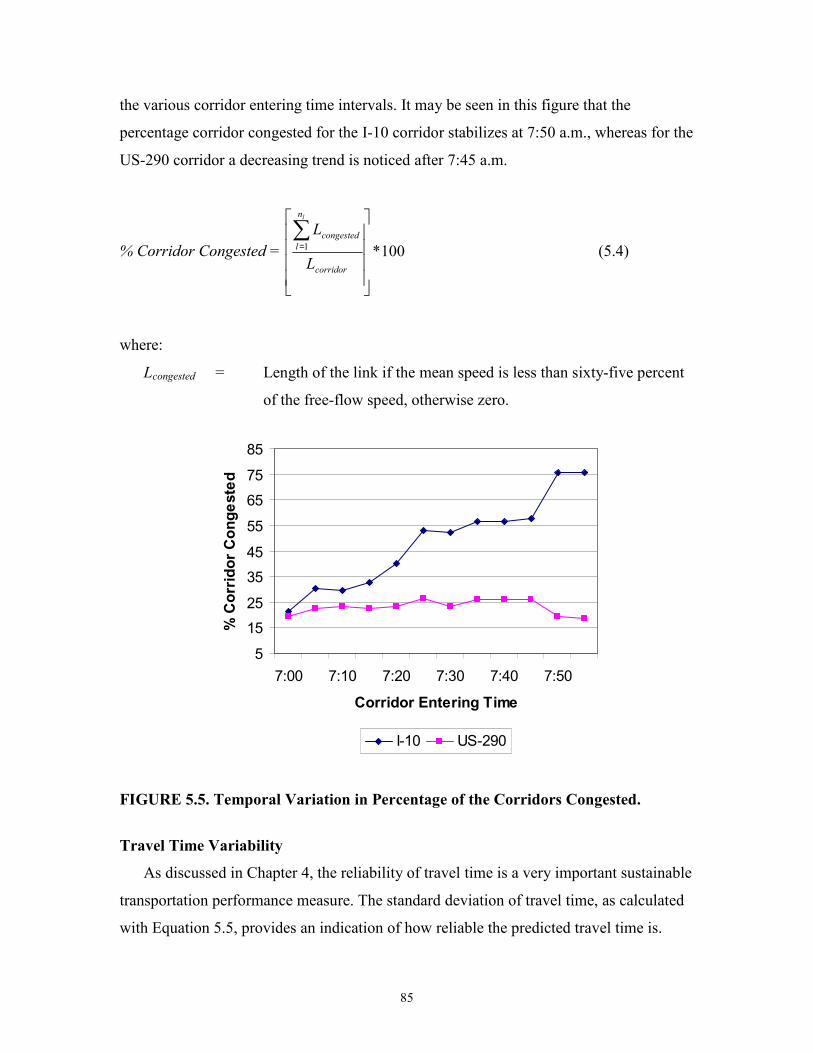
85
the various corridor entering time intervals. It may be seen in this figure that the
percentage corridor congested for the I-10 corridor stabilizes at 7:50 a.m., whereas for the
US-290 corridor a decreasing trend is noticed after 7:45 a.m.
% Corridor Congested = 100*1
∑
=
corridor
n
lcongested
L
Ll
(5.4)
where:
Lcongested = Length of the link if the mean speed is less than sixty-five percent
of the free-flow speed, otherwise zero.
FIGURE 5.5. Temporal Variation in Percentage of the Corridors Congested.
Travel Time Variability
As discussed in Chapter 4, the reliability of travel time is a very important sustainable
transportation performance measure. The standard deviation of travel time, as calculated
with Equation 5.5, provides an indication of how reliable the predicted travel time is.
5
1525
3545
55
6575
85
7:00 7:10 7:20 7:30 7:40 7:50
Corridor Entering Time
% Corridor Congested
I-10 US-290

86
Comparisons between links can be performed with the coefficient of variation, which can
be computed with Equation 5.6. Figure 5.6 shows the travel time standard deviations for
the various corridor entering time intervals, as well as the coefficients of variation for the
different links. It may be seen in this figure that the travel time variability shows great
variation both spatially and temporally with the I-10 corridor showing the greatest travel
time variability.
Sct = [ ]∑=
−−
tn
jctjct
t
XXn 1
2
)1(1 (5.5)
lt
ltlt X
SCV = (5.6)
where:
Sct = Corridor travel time standard deviation at time interval t
Slt = Travel time standard deviation for link l at time interval t
CVlt = Coefficient of variation for link l and at time interval t
Xjct = Corridor travel time for vehicle j at time interval t
ctX = Mean corridor travel time at time interval t
ltX = Mean travel time for link l at time interval t
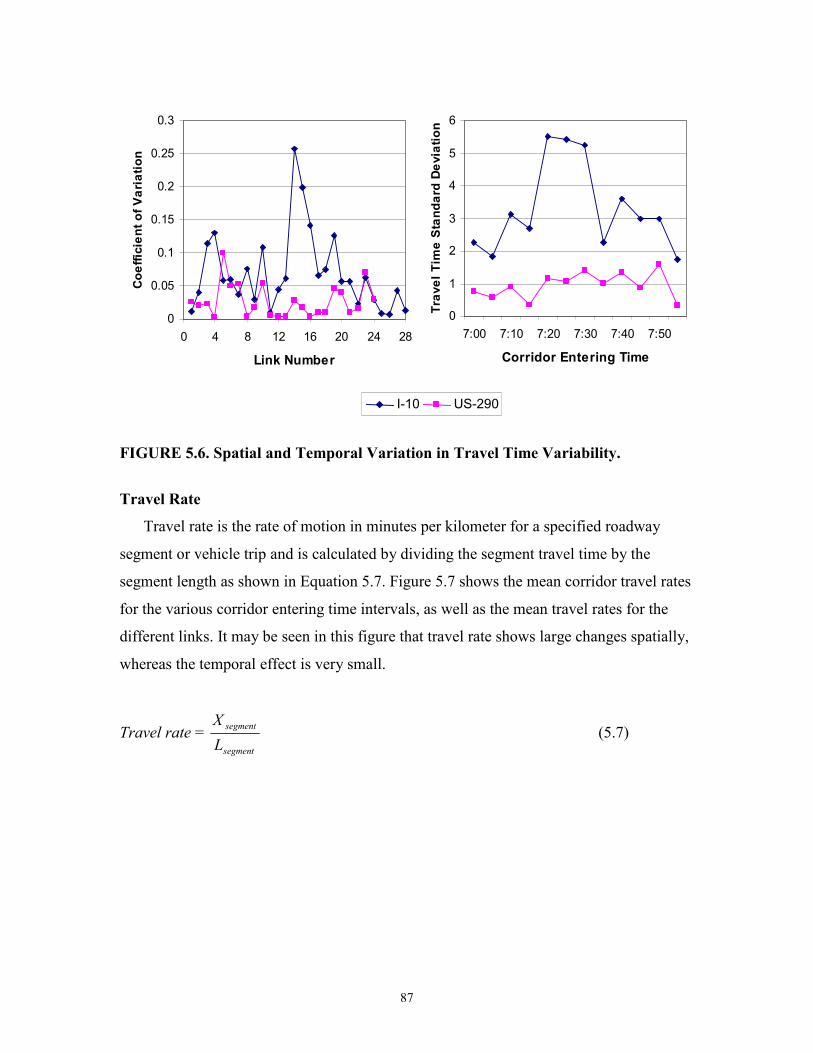
87
FIGURE 5.6. Spatial and Temporal Variation in Travel Time Variability.
Travel Rate
Travel rate is the rate of motion in minutes per kilometer for a specified roadway
segment or vehicle trip and is calculated by dividing the segment travel time by the
segment length as shown in Equation 5.7. Figure 5.7 shows the mean corridor travel rates
for the various corridor entering time intervals, as well as the mean travel rates for the
different links. It may be seen in this figure that travel rate shows large changes spatially,
whereas the temporal effect is very small.
Travel rate = segment
segment
LX
(5.7)
0
1
2
3
4
5
6
7:00 7:10 7:20 7:30 7:40 7:50
Corridor Entering Time
Travel Time Standard Deviation
0
0.05
0.1
0.15
0.2
0.25
0.3
0 4 8 12 16 20 24 28
Link Number
Coefficient of Variation
I-10 US-290
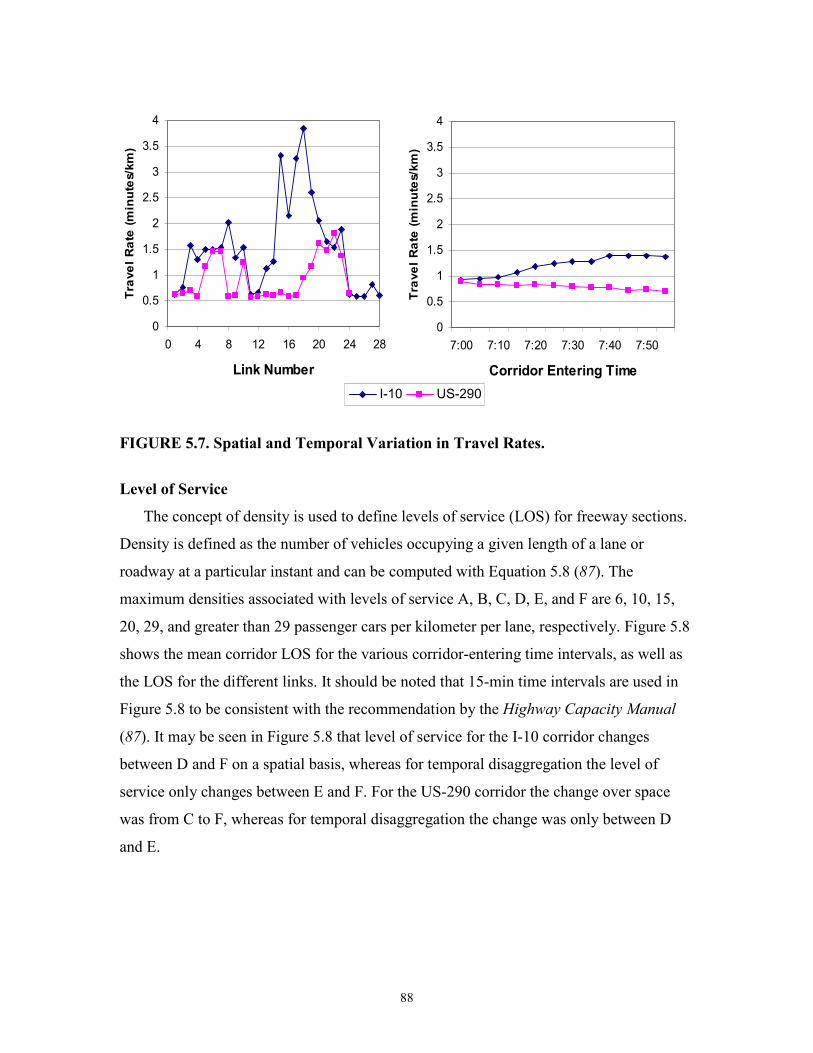
88
FIGURE 5.7. Spatial and Temporal Variation in Travel Rates.
Level of Service
The concept of density is used to define levels of service (LOS) for freeway sections.
Density is defined as the number of vehicles occupying a given length of a lane or
roadway at a particular instant and can be computed with Equation 5.8 (87). The
maximum densities associated with levels of service A, B, C, D, E, and F are 6, 10, 15,
20, 29, and greater than 29 passenger cars per kilometer per lane, respectively. Figure 5.8
shows the mean corridor LOS for the various corridor-entering time intervals, as well as
the LOS for the different links. It should be noted that 15-min time intervals are used in
Figure 5.8 to be consistent with the recommendation by the Highway Capacity Manual
(87). It may be seen in Figure 5.8 that level of service for the I-10 corridor changes
between D and F on a spatial basis, whereas for temporal disaggregation the level of
service only changes between E and F. For the US-290 corridor the change over space
was from C to F, whereas for temporal disaggregation the change was only between D
and E.
0
0.5
1
1.5
2
2.5
3
3.5
4
7:00 7:10 7:20 7:30 7:40 7:50
Corridor Entering Time
Travel Rate (minutes/km)
0
0.5
1
1.5
2
2.5
3
3.5
4
0 4 8 12 16 20 24 28
Link Number
Travel Rate (minutes/km)
I-10 US-290
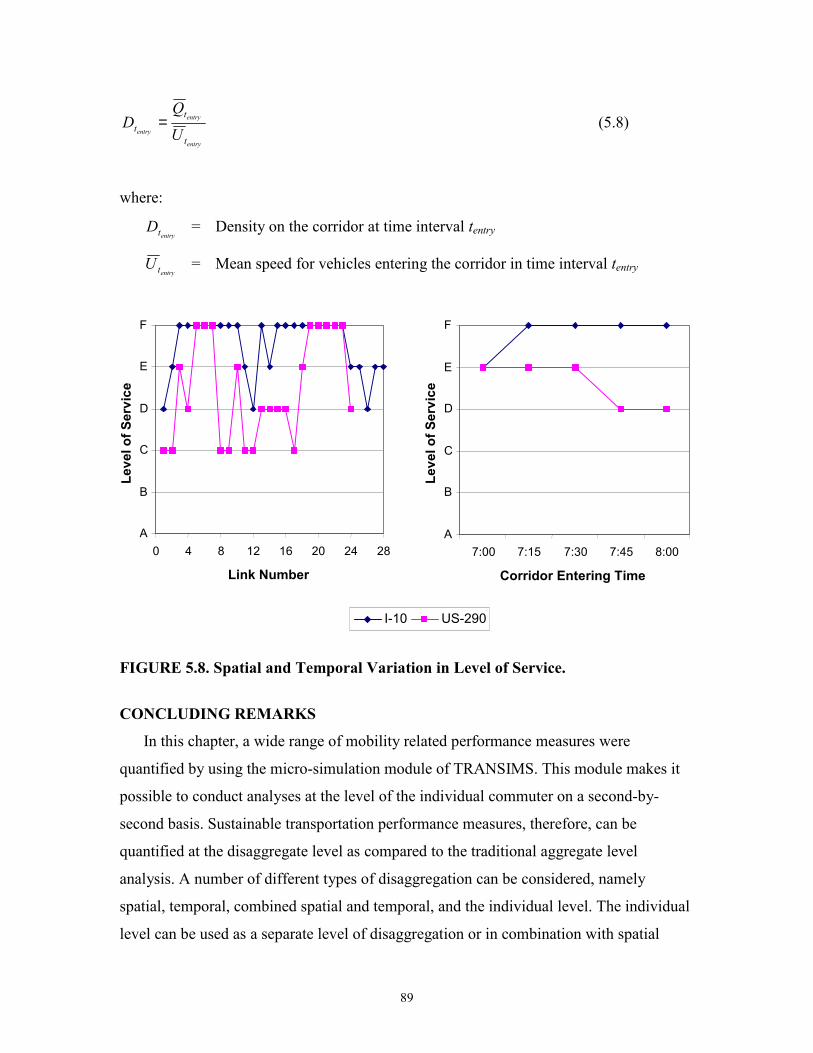
89
entry
entry
entryt
tt U
QD = (5.8)
where:
entrytD = Density on the corridor at time interval tentry
entrytU = Mean speed for vehicles entering the corridor in time interval tentry
FIGURE 5.8. Spatial and Temporal Variation in Level of Service.
CONCLUDING REMARKS
In this chapter, a wide range of mobility related performance measures were
quantified by using the micro-simulation module of TRANSIMS. This module makes it
possible to conduct analyses at the level of the individual commuter on a second-by-
second basis. Sustainable transportation performance measures, therefore, can be
quantified at the disaggregate level as compared to the traditional aggregate level
analysis. A number of different types of disaggregation can be considered, namely
spatial, temporal, combined spatial and temporal, and the individual level. The individual
level can be used as a separate level of disaggregation or in combination with spatial
I-10 US-290
A
B
C
D
E
F
7:00 7:15 7:30 7:45 8:00
Corridor Entering Time
Level of Service
A
B
C
D
E
F
0 4 8 12 16 20 24 28
Link Number
Level of Service
90
and/or temporal disaggregation. Spatial and temporal disaggregation can each be applied
at different levels of detail, which can be defined by the segment lengths and time
interval lengths, respectively. These types of disaggregation, as well as the resolution of
each dimension, can be changed to allow the analyst to make various trade-offs between
accuracy, computing time, and memory requirements.
It was shown that disaggregation based on individuals improved the accuracy with
which performance measures were quantified and made it possible to determine statistical
distributions for parameters such as speed and travel time. The Chi-squared distribution
was found to be an appropriate distribution for individual speed data on the AVI links,
whereas the normal distribution showed more promise for individual speed data on the
corridor level.
The discrete cell-based nature of TRANSIMS means that vehicles can have
instantaneous changes in velocity, resulting in seemingly erratic speed profiles. It was
found that a uniform kernel estimator can be used to smooth the individual speed profiles
produced by the TRANSIMS micro-simulator. These smoothed speed profiles were used
to quantify mobility related performance measures at various levels of spatial and
temporal disaggregation. It was again found that spatial disaggregation can considerably
improve the accuracy with which performance measures of sustainable transportation are
quantified.
The quantified performance measures are used as input into the multi-criteria
decision-making process and the index for sustainable transportation as will be discussed
in Chapter 7. The following chapter discusses how environmentally related performance
measures can be quantified by using output from the TRANSIMS model, as well as
various transportation environmental impact models.
91
CHAPTER 6: ENVIRONMENTAL RELATED PERFORMANCE
MEASURES
This chapter focuses on the phases of database development and quantifying
performance measures. As discussed in Chapter 3, the environment is one of the three
dimensions of sustainable transportation. In this chapter, environmental related
performance measures, namely vehicular emissions, noise pollution, and fuel
consumption are quantified at various levels of aggregation. Output from the micro-
simulator TRANSIMS, as well as a number of transportation environmental impact
models, are used to quantify the performance measures.
AIR POLLUTION
Preparation of the Emission Model
For this research, the MOBILE 5a vehicular emission model developed by the EPA
was used. The reason for using MOBILE 5a is that it is currently the state of the practice
in Texas and also in most of North America. The basic emission rates are determined
through actual vehicle tests on an apparatus called a dynamometer, which consists of a
large chassis with a roller under which the drive wheels of the vehicle are placed. The
roller applies forces to the drive wheels to simulate the loading experienced in actual
driving conditions. Vehicles are driven through cycles on the dynamometer that are
designed to be indicative of driving patterns in urban areas. Emissions for various vehicle
classes, model years, and operating conditions are recorded with special measuring
equipment. Basic emission rate equations are then developed for each pollutant, vehicle
type, model year, as well as emission standards and the emission control technologies
used (82,84).
The MOBILE 5a model can, therefore, be used to determine emissions from the
operating conditions of individual vehicles on a second-by-second basis. Because
traditional transportation planning models produce mean speeds for groups of vehicles,
the MOBILE 5a model is generally not applied at this level of disaggregation. The
TRANSIMS model, however, can produce this type of disaggregate information. Based
on the illustrations in Chapter 5 that disaggregate information can provide more accurate
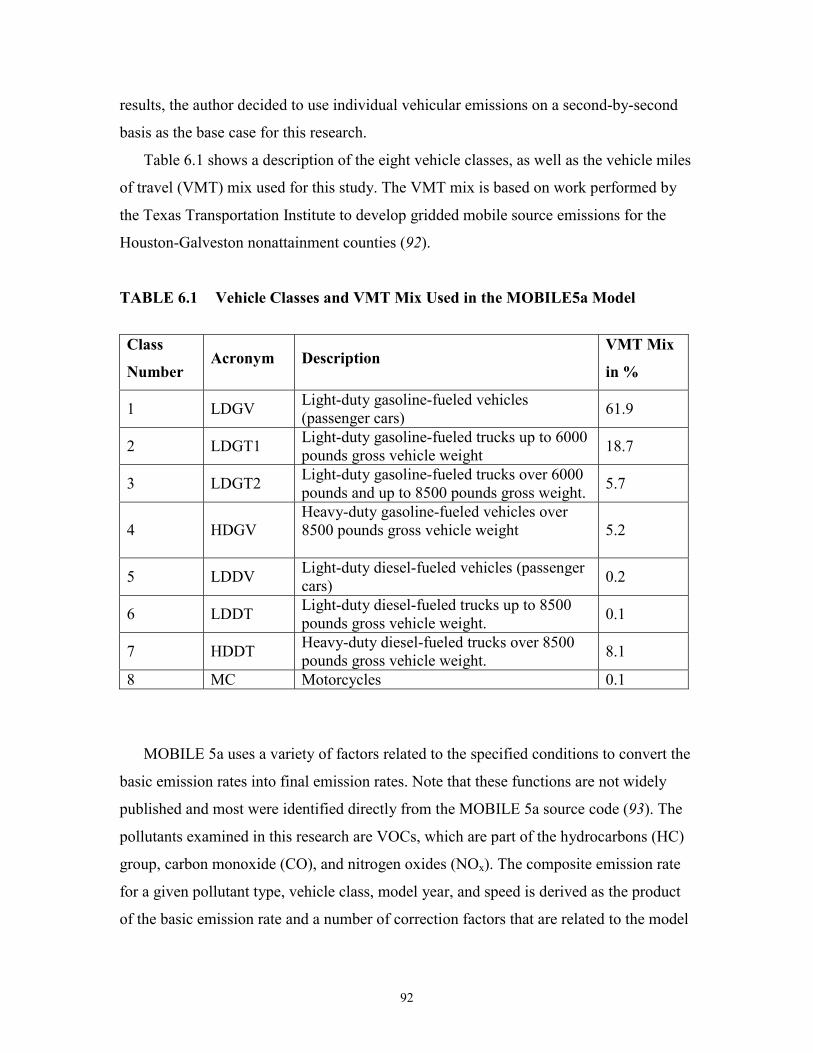
92
results, the author decided to use individual vehicular emissions on a second-by-second
basis as the base case for this research.
Table 6.1 shows a description of the eight vehicle classes, as well as the vehicle miles
of travel (VMT) mix used for this study. The VMT mix is based on work performed by
the Texas Transportation Institute to develop gridded mobile source emissions for the
Houston-Galveston nonattainment counties (92).
TABLE 6.1 Vehicle Classes and VMT Mix Used in the MOBILE5a Model
Class
Number Acronym Description
VMT Mix
in %
1 LDGV Light-duty gasoline-fueled vehicles (passenger cars) 61.9
2 LDGT1 Light-duty gasoline-fueled trucks up to 6000 pounds gross vehicle weight 18.7
3 LDGT2 Light-duty gasoline-fueled trucks over 6000 pounds and up to 8500 pounds gross weight. 5.7
4 HDGV Heavy-duty gasoline-fueled vehicles over 8500 pounds gross vehicle weight
5.2
5 LDDV Light-duty diesel-fueled vehicles (passenger cars) 0.2
6 LDDT Light-duty diesel-fueled trucks up to 8500 pounds gross vehicle weight. 0.1
7 HDDT Heavy-duty diesel-fueled trucks over 8500 pounds gross vehicle weight. 8.1
8 MC Motorcycles 0.1
MOBILE 5a uses a variety of factors related to the specified conditions to convert the
basic emission rates into final emission rates. Note that these functions are not widely
published and most were identified directly from the MOBILE 5a source code (93). The
pollutants examined in this research are VOCs, which are part of the hydrocarbons (HC)
group, carbon monoxide (CO), and nitrogen oxides (NOx). The composite emission rate
for a given pollutant type, vehicle class, model year, and speed is derived as the product
of the basic emission rate and a number of correction factors that are related to the model

93
years and operating characteristics of the vehicles. The general relationship for
computing the MOBILE 5a emission rates is shown in Equations 6.1 to 6.6 (94).
,J,P; j,Y; p,N; yiDHSRFCBC iyiyiyiyiyiypjiypiypj 1111 1 ====∀+++++=
(6.1)
where:
iypjC1
= Composite emission rate for vehicle class i, model year y, pollutant p,
and speed index j (g/km)
iypB = Base emission rate for vehicle class i, model year y, and pollutant p
(g/km)
iypjC = Composite correction factor for vehicle class i, model year y, pollutant
p, and speed index j
iyF = Refueling factor for vehicle class i and model year y ( p = HC)
iyR = Running loss factor for vehicle class i in model year y ( p = HC)
iyS = Resting loss factor for vehicle class i and model year y ( p = HC)
iyH = Hot soak emission factor for vehicle class i and model year y ( p = HC)
iyD = Diurnal emission factor for vehicle class i and model year y ( p = HC)
N = Number of vehicle classes
Y = Number of model years
P = Number of pollutant types
J = Number of average speed values used in analysis. For example, in this

94
research the average speeds ranged from 4.8 km/h to 104 km/h in
increments of 1.6 km/h (1 mi/h) then J = 63 and the speed associated with
speed index j = 10 would be 19.2 km/h.
It should be noted that the evaporative factors related to HC emissions in Equation
6.1 are often given in gram per unit time rather than g/km. These factors, therefore, need
to be converted in order to obtain the desired emission rate. In addition, ambient
temperature and Reid vapor pressure (RVP) also affect the emission rate. The details of
these effects are beyond the scope of this report but may be identified directly from the
MOBILE 5a source code.
The composite correction factor for a given vehicle class i, model year y, pollutant p,
and speed index j is calculated as shown in Equation 6.2.
,Jj,P; ,Y; p y ,N; iHTALVMS
C iypiypiypiypiypiy
iypsiypj 111 1 =∀==∀=∀= (6.2)
where:
iypjS
= Speed correction factor for vehicle class i, model year y, pollutant p, and
speed index j
iyM = Cold start/ hot start adjustment factor for vehicle class i, and model year y
iypV = Fuel volatility factor for vehicle class i, model year y, and pollutant p
iypL = Loading factor for vehicle class i, model year y, and pollutant p
iypA = Air conditioning factor for vehicle class i, model year y, and pollutant p
iypT = Trailer towing factor for vehicle class i, model year y, and pollutant p
iypH = Humidity factor for vehicle class i, model year y, and pollutant p (p= NOX)

95
The speed correction factor for the three pollutant types examined in this section is shown
in Equation 6.3. Note that these equations apply only to post-1976 model years and other
functions are used for earlier model years.
( )x
2
x
NO ;1 11 543exp
)NO1 ;1
11 21
==∀
=∀=∀++=
≠=∀=∀
=∀=∀+=
p,Jj,Y; y,N; iskskkS
,P (p p ,Jj
,Y; y,N; iksk
S
jiypjjiypjiypjiypj
iypjj
iypjiypj
(6.3)
where:
js
= Speed associated with speed index j (km/h)
iypjkm = Constant m for vehicle class i, model year y, pollutant p, and speed
index j
The cold start / hot start adjustment factor for a given vehicle class i and model year y is
calculated using Equation 6.4.
YyNixwxw
M iyiyiyiyiy ,1 ;,1
161
26
1
==∀
−−+
+=
−
(6.4)
where:
iyw
= Fraction of vehicle class i and model year y in hot start mode
iyx = Fraction of vehicle class i and model year y in cold start mode
Once the composite emission rate, iypjC1 , is identified an aggregate emission rate by
pollutant and vehicle class is calculated as shown in Equation 6.5.
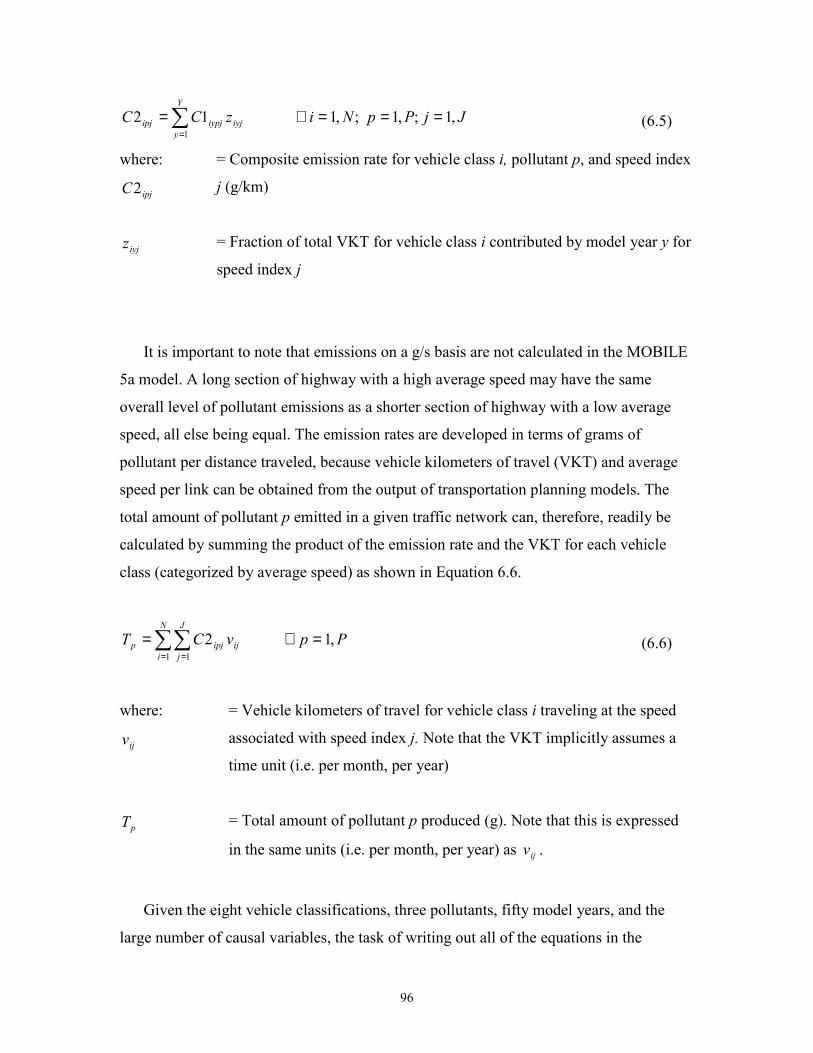
96
JjPpNizCCY
yiyjiypjipj ,1 ;,1 ;,1 12
1
===∀=∑=
(6.5)
where:
ipjC2
= Composite emission rate for vehicle class i, pollutant p, and speed index
j (g/km)
iyjz = Fraction of total VKT for vehicle class i contributed by model year y for
speed index j
It is important to note that emissions on a g/s basis are not calculated in the MOBILE
5a model. A long section of highway with a high average speed may have the same
overall level of pollutant emissions as a shorter section of highway with a low average
speed, all else being equal. The emission rates are developed in terms of grams of
pollutant per distance traveled, because vehicle kilometers of travel (VKT) and average
speed per link can be obtained from the output of transportation planning models. The
total amount of pollutant p emitted in a given traffic network can, therefore, readily be
calculated by summing the product of the emission rate and the VKT for each vehicle
class (categorized by average speed) as shown in Equation 6.6.
∑∑= =
=∀=N
i
J
jijipjp PpvCT
1 1
,1 2
(6.6)
where:
ijv
= Vehicle kilometers of travel for vehicle class i traveling at the speed
associated with speed index j. Note that the VKT implicitly assumes a
time unit (i.e. per month, per year)
pT = Total amount of pollutant p produced (g). Note that this is expressed
in the same units (i.e. per month, per year) as ijv .
Given the eight vehicle classifications, three pollutants, fifty model years, and the
large number of causal variables, the task of writing out all of the equations in the
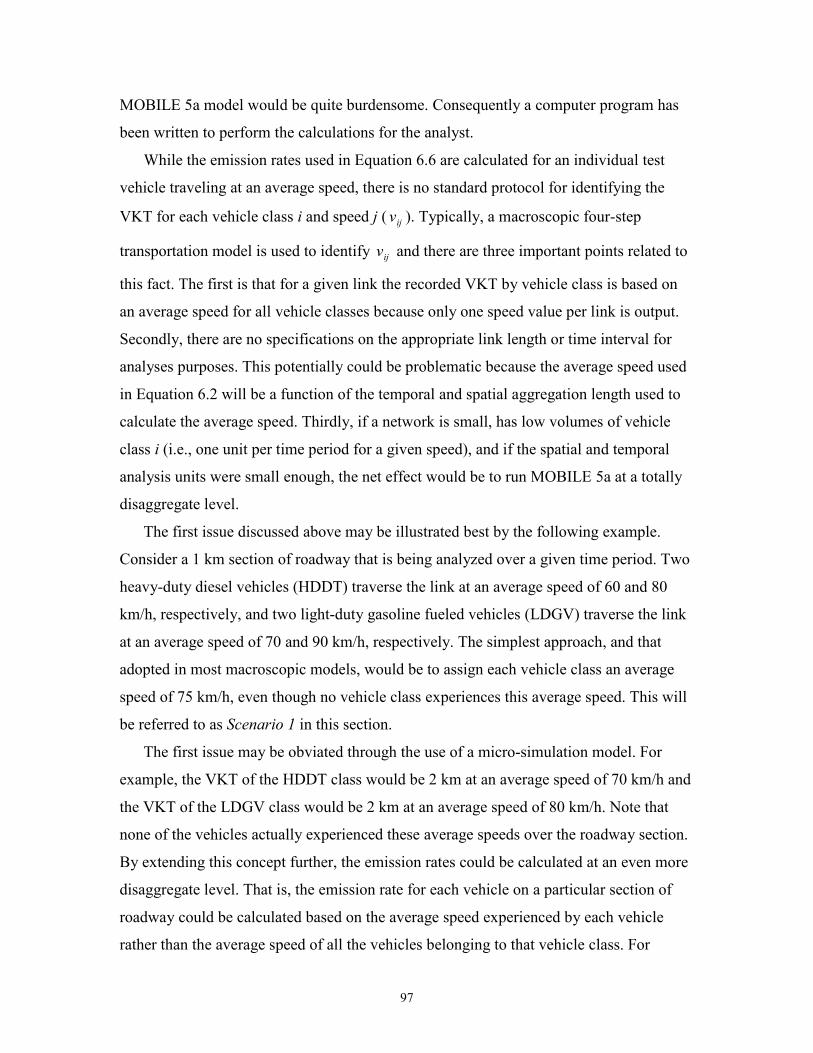
97
MOBILE 5a model would be quite burdensome. Consequently a computer program has
been written to perform the calculations for the analyst.
While the emission rates used in Equation 6.6 are calculated for an individual test
vehicle traveling at an average speed, there is no standard protocol for identifying the
VKT for each vehicle class i and speed j ( ijv ). Typically, a macroscopic four-step
transportation model is used to identify ijv and there are three important points related to
this fact. The first is that for a given link the recorded VKT by vehicle class is based on
an average speed for all vehicle classes because only one speed value per link is output.
Secondly, there are no specifications on the appropriate link length or time interval for
analyses purposes. This potentially could be problematic because the average speed used
in Equation 6.2 will be a function of the temporal and spatial aggregation length used to
calculate the average speed. Thirdly, if a network is small, has low volumes of vehicle
class i (i.e., one unit per time period for a given speed), and if the spatial and temporal
analysis units were small enough, the net effect would be to run MOBILE 5a at a totally
disaggregate level.
The first issue discussed above may be illustrated best by the following example.
Consider a 1 km section of roadway that is being analyzed over a given time period. Two
heavy-duty diesel vehicles (HDDT) traverse the link at an average speed of 60 and 80
km/h, respectively, and two light-duty gasoline fueled vehicles (LDGV) traverse the link
at an average speed of 70 and 90 km/h, respectively. The simplest approach, and that
adopted in most macroscopic models, would be to assign each vehicle class an average
speed of 75 km/h, even though no vehicle class experiences this average speed. This will
be referred to as Scenario 1 in this section.
The first issue may be obviated through the use of a micro-simulation model. For
example, the VKT of the HDDT class would be 2 km at an average speed of 70 km/h and
the VKT of the LDGV class would be 2 km at an average speed of 80 km/h. Note that
none of the vehicles actually experienced these average speeds over the roadway section.
By extending this concept further, the emission rates could be calculated at an even more
disaggregate level. That is, the emission rate for each vehicle on a particular section of
roadway could be calculated based on the average speed experienced by each vehicle
rather than the average speed of all the vehicles belonging to that vehicle class. For

98
example, the HDDT would have one VKT at an average speed of 60 km/h and one VKT
at an average speed of 80 km/h, as opposed to the two VKT at an average speed of 70
km/h. This approach will be referred to as Scenario 2 in this section.
The relationship between emission estimates and the time interval and distance used
in the analyses are unclear. Identifying this relationship will be the focus of the remainder
of the section by examining how different aggregation levels can affect emission
estimates. It is important to note that the goal is not to recommend a specific aggregation
policy but to show how the trade-offs can be examined and to quantify these trade-offs on
a real test bed.
Sensitivity Analysis of Emissions Estimates
It was found that, in general, MOBILE 5a emission rates are: i) relatively high at low
average speeds; ii) decrease at a decreasing rate as the average speed increases; and iii)
then, after a threshold average speed, begin to increase again. If the emission rates were a
linear function of average speed then aggregation size would have no effect on the overall
results. However, because emission rates have an inherently non-linear profile, the
aggregation effect needs to be examined. This point may be illustrated best by example.
Consider a 1 km link that is being analyzed over three consecutive 20-min periods.
There are 100 LDGV vehicles in each 20-min period and the average speed experienced
on the link in the three periods are 60, 80, and 100 km/h. The corresponding emission
rates for VOC as produced by the MOBILE 5a model for the Houston test bed are:
0.6998; 0.5728; and 0.7353 g/km for the 60, 80 and 100 km/h speeds, respectively. If the
analysis was performed for each 20-min period, the total estimated VOC emissions using
Equation 6.6 would be 200.8 g. However, if the analysis was performed over 1 h, the
three 100 VKT for LDGV vehicles would have an average travel speed of 80 km/h and
the estimated total VOC emissions would be 171.8 g. In order to predict the magnitude of
this difference and whether it would be positive or negative, detailed information on the
emission functions would be required. More importantly, because there are no clear
guidelines provided on how to calculate the VKT (vij) in Equation 6.6, it would be
impossible to state which aggregation level gives the best results. All that can be shown
are the relative differences in emission estimates for different scenarios, which is the goal

99
of the sensitivity analyses performed in the next section.
Spatial and Temporal Disaggregation
The sensitivity of the emission estimates to spatial aggregation was analyzed by
varying the segment length from 30 m to that of the base links. The full peak hour was
used as the analysis period. The sensitivity of the emission estimates to temporal
aggregation was analyzed by varying the analysis time intervals from 10s to 60 min.
Additionally, the temporal analysis was performed on the base link level.
For each level of temporal and spatial aggregation described above, the total emission
estimates for the corridor were calculated using the previously described Scenarios 1 and
2. In the case of Scenario 1, the average speed and total distance traveled for all vehicles
in each vehicle class were determined for each spatial and temporal aggregation level.
The average speed along with the VKT per vehicle class was then used to estimate vij in
Equation 6.6. In the case of Scenario 2, the average speed and distance traveled of each
individual vehicle within each vehicle class were determined for each spatial and
temporal aggregation level. The average speed and VKT of each vehicle were used to
estimate vij. The total emissions determined with each scenario were then compared to the
base case and the real percentage deviations from the base are shown in Figure 6.1.
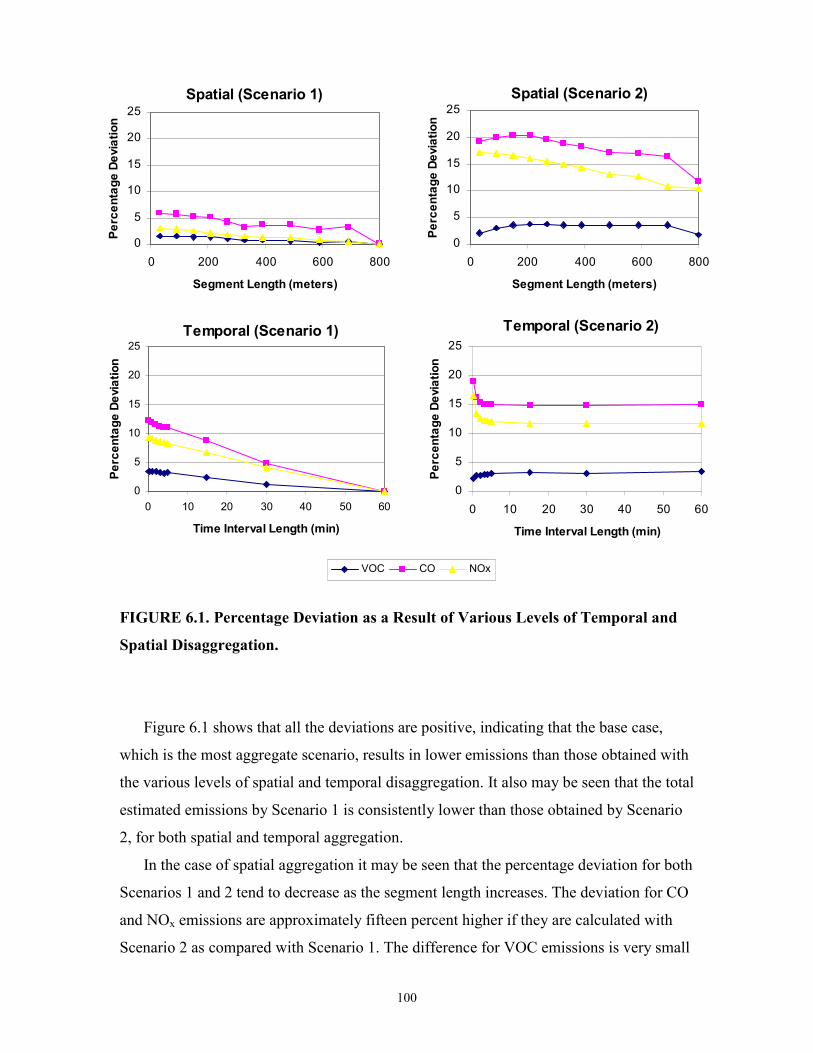
100
FIGURE 6.1. Percentage Deviation as a Result of Various Levels of Temporal and
Spatial Disaggregation.
Figure 6.1 shows that all the deviations are positive, indicating that the base case,
which is the most aggregate scenario, results in lower emissions than those obtained with
the various levels of spatial and temporal disaggregation. It also may be seen that the total
estimated emissions by Scenario 1 is consistently lower than those obtained by Scenario
2, for both spatial and temporal aggregation.
In the case of spatial aggregation it may be seen that the percentage deviation for both
Scenarios 1 and 2 tend to decrease as the segment length increases. The deviation for CO
and NOx emissions are approximately fifteen percent higher if they are calculated with
Scenario 2 as compared with Scenario 1. The difference for VOC emissions is very small
VOC CO NOx
Temporal (Scenario 2)
0
5
10
15
20
25
0 10 20 30 40 50 60
Time Interval Length (min)
Percentage Deviation
Temporal (Scenario 1)
0
5
10
15
20
25
0 10 20 30 40 50 60
Time Interval Length (min)
Percentage Deviation
Spatial (Scenario 2)
0
5
10
15
20
25
0 200 400 600 800
Segment Length (meters)
Percentage
Deviation
Spatial (Scenario 1)
0
5
10
15
20
25
0 200 400 600 800
Segment Length (meters)
Percentage
Deviation

101
(less than three percent). It may also be seen in Figure 6.1 that for both Scenarios 1 and 2,
as the segment length increases, the percentage deviation from the base case decreases.
In the case of temporal aggregation, it may be seen that Scenario 1 is much more
susceptible for time interval changes than Scenario 2. In the case of Scenario 1 the
percentage deviation decreases as the time interval length increases. For Scenario 2 the
percentage deviation remains nearly constant regardless of the interval length used. In the
case of CO emissions, for example, the difference between Scenario 1 and Scenario 2 at
5-min intervals is approximately five percent, whereas the difference at 60-min intervals
is fifteen percent.
It can be concluded that for this test corridor, larger emission estimates will be
obtained if Scenario 2 is used as opposed to Scenario 1. Therefore, if the hypothesis is
true that Scenario 2 is more accurate than Scenario 1, the total emissions for the test
corridor is higher than what is estimated through the conventional approach.
Combined Spatial and Temporal Disaggregation
A comparison was performed for combined spatial and temporal disaggregation. Four
time intervals 10, 60, 120, and 300 s, were used in combination with four segment
lengths 30, 180, and 360 m and the base links. The total vehicular emission for each of
the three pollutant types, therefore, could be determined for sixteen combinations of
spatial and temporal disaggregation and for both Scenarios 1 and 2.
It was found that the deviations from the base case for Scenarios 1 and 2 are very
similar and exclusively positive. Carbon monoxide had the greatest deviation from the
base case at twenty percent when 30 m segments were combined with 10-s intervals.
Volatile organic compounds showed the smallest deviation at less than two percent when
the base links were combined with 5-min intervals. Additionally, it was found that for
fixed spacings the size of the time increment made hardly any difference (less than two
percent), whereas for fixed time increments the segment lengths made a more noticeable
difference (up to ten percent).
A test was conducted to determine emission estimates at the totally disaggregate
level, namely for each vehicle on a second-by-second basis. Although MOBILE 5a was
never intended to be used in this way, it is interesting to notice that the emissions
102
produced by this totally disaggregate approach were within one percent of that obtained
with Scenario 2 at 10-s intervals and 30 m segments.
Memory Efficiency
It can be expected that highly disaggregate data sets produced by micro-simulation
models and ITS applications can result in very high memory requirements and slow
computing times. For example, TRANSIMS produced approximately ten million lines of
data for the I-10 corridor during the peak hour, requiring approximately 500 megabytes
of memory.
By aggregating the micro-simulation data spatially and/or temporally, considerable
reduction in the total number of observations can be achieved. For example, in the case of
Scenario 2, a six-fold reduction in data archiving requirements can be achieved when 90
m segments are used and a ten-fold reduction when 10-s intervals are used, as compared
with the second-by-second micro-simulation data.
Sensitivity Analysis with ITS Data
Traffic data as produced by ITS applications are sometimes used as input into
emissions models such as MOBILE 5a (95). These data, however, are typically collected
and stored at varying levels of spatial and temporal aggregation. Additionally, with some
forms of ITS data it is also possible to keep track of the individual vehicles.
TRANSIMS was used to simulate output from loop detectors, AVI technology, and
AVL technology. For comparison purposes, only the LDGV vehicle type was considered.
Equation 6.6 was used to determine the total emissions based on data produced by the
various types of ITS applications. The peak hour was used as the time interval and the
base links were used as segments. The only difference between the various calculations is
in the determination of ijv (VKT for the LDGV vehicles traveling at speed index j). The
most aggregate application (output from the conventional transportation planning model)
was again selected as the base case.
103
Loop Detectors
The most aggregate form of ITS data considered in this analysis is from inductive
loop detectors. In order to simulate the loop detectors, detection areas of 40 m in length
were created before each point where the on- and off-ramps connect with the mainline of
the freeway. Forty-meter detection areas were used because the maximum simulated
velocity of a vehicle is 37.5 m/s and the 40 m length ensures that no vehicle will cross it
undetected. The detection was performed by recording the time and location of the first
observation of each vehicle within the detection area.
The average space mean speed of a given link was assumed to be equal to the average
instantaneous or time mean speed measured at the loop detectors at the end of the link.
The VKT was calculated based on the link length and measured volume. Note that due to
the aggregate nature of link detectors only Scenario 1 could be modeled.
It was found that the differences in total emissions calculated with loop detector data
were zero, twelve, and six percent for VOC, CO, and NOx emissions, respectively. The
primary reason for the differences is that the speeds from loop detectors are based on
time mean speed while those for the base case are based on space mean speed.
Automatic Vehicle Identification (AVI) Technology
Automatic vehicle identification data were simulated by matching the individual
vehicles from detection area to detection area, and by determining their mean speeds
based on the difference in detection times and the spatial separation of the detection
areas. Given the link travel time and link speed, the average speed of each vehicle
traversing the link (space mean speed) was determined. These speeds could either be
averaged across all vehicles in the LDGV class (Scenario 1) or kept separate (Scenario
2). Because Scenario 1 is equal to the base case, only the application of Scenario 2 will
be discussed in this section.
The VKT is determined by considering the link length and the number of vehicles
matched at the beginning and end of the links. With this approach a fifteen percent under-
reporting was noticed due to vehicles entering the main lanes downstream of a detection
area and, therefore, not being detected on that link. This under-reporting was adjusted
104
using a factor representing the ratio of the simulated volume for that link and the number
of matches recorded.
The differences in total emission rates, as compared with the base case, of six,
eighteen, and fourteen percent were obtained for VOC, CO, and NOx emissions,
respectively. These differences, however, are within five percent of what was obtained
with Scenario 2 applied at 60 min and for the base links. The AVI results are slightly
different from this scenario due to the necessary adjustments made because of the under-
reporting in the AVI data, whereas with the regular simulation data the VKT and speed of
all the vehicles on the network could be determined.
Automatic Vehicle Location (AVL) Technology
By keeping track of each vehicleís speed and location on a second-by-second basis,
AVL data can be simulated. The assumption made for AVL technology is that all
vehicles in the network may be detected on a second-by-second basis. In the case of AVL
data, the instantaneous speed and distance traveled by each vehicle on a second-by-
second basis was used for determining ijv .
It was found that the total emissions calculated with AVL data were within two
percent of that obtained with the AVI data. Differences of four, twenty, and sixteen
percent as compared with the base case were obtained for VOC, CO, and NOx emissions,
respectively. The authors hypothesized that the reason that the more disaggregate
approaches produce higher estimates of emissions is due to a large percentage of high
emitting low speeds that are not accounted for with aggregate approaches.
Confirmation of Results with Other Models
Although TRANSIMS was used as the simulation model for this study, the concepts
and principles demonstrated could be applied to any simulation model that can produce
travel information for individual vehicles on a second-by-second basis. For comparison
purposes, the CORSIM micro-simulation model was calibrated for the I-10 corridor for
the same analysis period as that used in this study. It should be noted that unlike
TRANSIMS, which uses cellular automata (particle hopping) logic, CORSIM uses car
following logic, resulting in potentially different speed profiles for the two models. By
105
using a conversion program, travel information could be obtained for individual vehicles.
A highly congested link of 630 m in length on the I-10 corridor was selected for
comparison between TRANSIMS and CORSIM results.
The total emissions for the link were determined with both models according to
Scenario 1 (base case) and Scenario 2 (individual vehicles). It was found that the actual
emissions produced by TRANSIMS were on average twenty percent higher than that
produced by CORSIM. However, the percentage differences between Scenarios 1 and 2
of the two models were comparable.
In another study the emissions module within the EMPRO model was used to
illustrate the effect of aggregation on emission estimation for the same corridor (96). The
magnitude of the differences in emission estimation due to aggregation was found to be
comparable with this study. It can be concluded, therefore, that aggregation can have an
important effect on emission estimation, regardless of the type of micro-simulation or
emissions model used.
Comparison Between Smoothed and Unsmoothed Cases
In order to determine whether it makes a large difference in the estimation of
vehicular emissions if the speed profiles produced by TRANSIMS are not smoothed, a
comparison was made between the results as obtained from the smoothed and
unsmoothed speed data. Vehicular emissions were determined for the two test corridors
on a range of temporal and spatial disaggregation levels as shown above in Figure 6.1.
The MAPE metric was used to determine the difference between the total vehicular
emissions as determined with the smoothed speed data and the unsmoothed speed data. It
was found that the difference between the results of the smoothed approach and the
unsmoothed approach is generally small. The greatest difference, namely eleven percent,
is observed for VOC pollution determined on a second-by-second basis, for the I-10
corridor. For spatial and temporal disaggregation, fairly small differences were observed
with averages of four percent or less. Unsmoothed speed profiles of individual vehicles,
therefore, can be used when fairly coarse estimates of vehicular emission are required.

106
NOISE POLLUTION
Because the STAMINA model is currently the state of the practice for traffic noise
modeling in Texas and most of North America, it was used as the analysis tool for this
research. The program uses Reference Mean Emission Levels, or REMELS, for different
vehicle classes as the core of the model. The STAMINA model is able to distinguish
between light vehicles, medium vehicles, and heavy vehicles. Light vehicles are defined
as having two axles, four wheels, and weighing less than 4,500 kg. Medium vehicles are
defined as having two axles, six wheels, and weighing between 4,500 kg and 12,000 kg.
Heavy vehicles have three or more axles and weigh over 12,000 kg. The equation for the
simplified version of the original STAMINA model that was designed for use on personal
computers is shown as Equation 6.7 and the formula for computing the constant term is
shown as Equation 6.8 (84).
=
+αφ
115
15log10
Eeq D
QKL (6.7)
46.12
39.281.2
10*60.383.553.442 HTHT
MTMT
AA v
vQ
Qv
K −++= (6.8)
where:
eqL = Equivalent continuous sound level measured in decibel (dB)
φ = Equivalent subtending angle, with 9.058.01180
αφ
+= if the
view is unobstructed
Q = Traffic volume (vehicles/hour)
α = Land dampening coefficient
ED = Equivalent lane distance, which is the average of the
distance to the nearest and furthest lane (m)
AQ , MTQ , HTQ = Volume of automobiles, medium trucks, and heavy trucks,
respectively (vehicles/hour)
107
Av , MTv , HTv = Average speed of automobiles, medium trucks, and heavy
trucks (kilometers/hour)
In preparing the setup for STAMINA, the alignment of the roadway, as well as the
location of the receivers, needs to be specified with a cartesian coordinate system by
using X, Y, and Z coordinates (97). Additional information that need to be specified for
the model are as follows: i) hourly volume for each vehicle class on each of the segments;
ii) average speed on each of the segments; iii) whether to model barriers; and iv) whether
to model a soft or a hard site. The output provided by STAMINA include the mean,
standard deviation, median, tenth percentile, and ninetieth percentile Leq values (in dB),
for all the receivers.
It may be noticed in Equation 6.8 that the STAMINA model is developed to make use
of mean traffic characteristics to compute noise pollution at the link level. The model can,
therefore, not be used to compute noise pollution at the level of the individual commuter.
It is also not very suitable for computing noise pollution at short time increments or very
short segment lengths.
By dividing the corridor into segments of reasonable length, the effect of spatial
disaggregation, however, could be tested. With the highest level of spatial aggregation,
the whole corridor was considered as one segment. A more disaggregate level considerd
the AVI links as segments, whereas the most disaggregate form of spatial disaggregation
considered the interchange links as segments. In each case the coordinates of the
receivers were specified such that the X-coordinates correspond to the center of the
segment under investigation, the Y-coordinates correspond to a 100-ft offset from the
roadway, and the Z-coordinates correspond to a 5-ft elevation to simulate the height of an
average human.
For illustration purposes, Figure 6.2 shows the results of the most aggregate scenario,
as well as the most disaggregate scenario. It may be noticed in Figure 6.2 that noise
pollution on the interchange links shows moderate changes over the lengths of the
corridors, with the I-10 corridor showing greater variation in noise pollution than the US-
290 corridor. The mean noise pollution for the US-290 corridor at 76.8 dB is greater,
however, than that for the I-10 corridor at 73.7 dB. A methodology that considers spatial
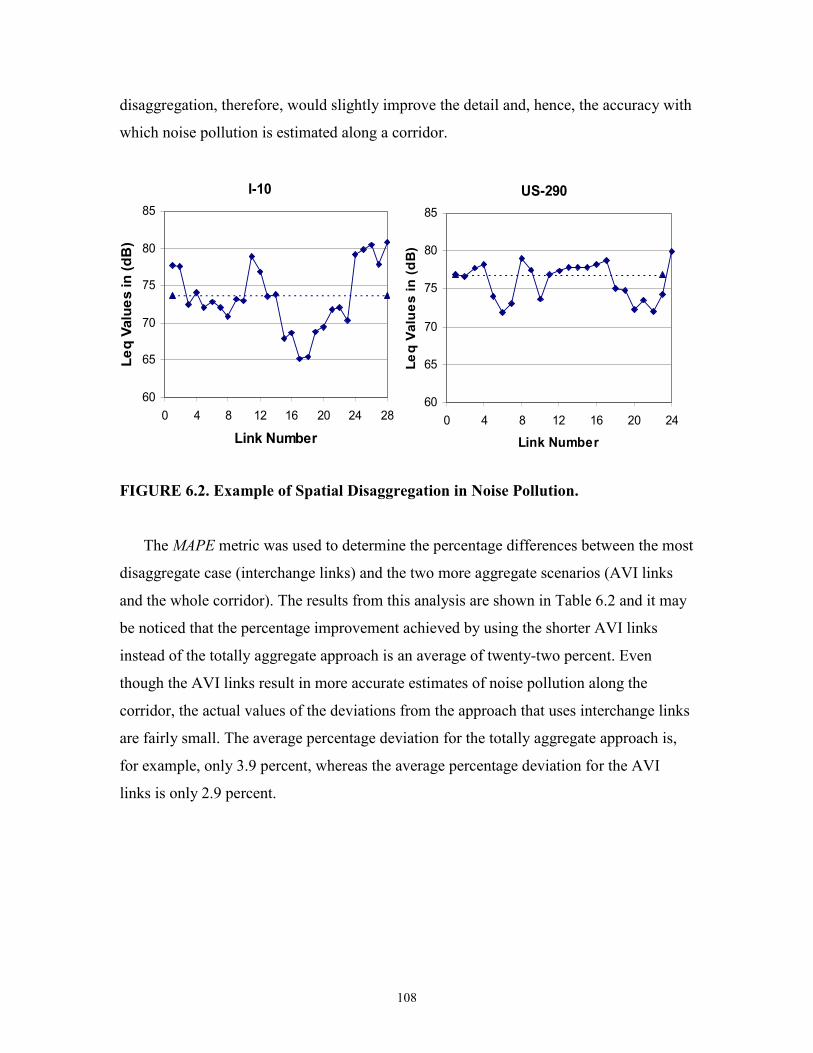
108
disaggregation, therefore, would slightly improve the detail and, hence, the accuracy with
which noise pollution is estimated along a corridor.
FIGURE 6.2. Example of Spatial Disaggregation in Noise Pollution.
The MAPE metric was used to determine the percentage differences between the most
disaggregate case (interchange links) and the two more aggregate scenarios (AVI links
and the whole corridor). The results from this analysis are shown in Table 6.2 and it may
be noticed that the percentage improvement achieved by using the shorter AVI links
instead of the totally aggregate approach is an average of twenty-two percent. Even
though the AVI links result in more accurate estimates of noise pollution along the
corridor, the actual values of the deviations from the approach that uses interchange links
are fairly small. The average percentage deviation for the totally aggregate approach is,
for example, only 3.9 percent, whereas the average percentage deviation for the AVI
links is only 2.9 percent.
I-10
60
65
70
75
80
85
0 4 8 12 16 20 24 28
Link Number
Leq Values in (dB)
US-290
60
65
70
75
80
85
0 4 8 12 16 20 24
Link Number
Leq Values
in (dB)

109
TABLE 6.2 MAPE Between the Interchange Links and the Two More Aggregate
Scenarios
Corridor Aggregate Approach AVI links % Improvement
I-10 4.9 3.4 31.0
US-290 2.8 2.4 13.1
Mean 3.8 2.9 22.1
FUEL CONSUMPTION
There are numerous models that can be used to determine fuel consumption along a
freeway corridor. For this research the authors decided to use the fuel consumption model
that was developed for the macroscopic simulation model (FREFLO). This model was
selected because of its close resemblance with the widely used energy-based model
developed by the Australian Road Research Board (ARFCO) and the fact that it was
validated on a Texas freeway, namely a section of I-35 near Austin (98). It may be seen
in Equation 6.9 that the form of the model shows a nonlinear relationship with speed and
acceleration as the two independent variables.
02
542
32
1 )( >++++=eaeex aPaPvP
vPPF (6.9)
If the expression eaPvPP 42
31 ++ is negative, then vPFx 2=
Where:
Fx = Fuel consumption (in 1000 gal/mile)
v = Mean speed (in ft/sec)
ae = Effective acceleration (in ft/sec2)
P1, P3, P4 = Constants derived for rolling, air, and effective inertial resistance,
respectively
P2 = A constant related to idle fuel consumption
P5 = A constant related to a product of inertial energy and acceleration
110
Calibration yielded the following values for the constants: P1 = 12.76; P2 = 700; P3 =
0.0023; P4 = 39.21; and P5 = 0.0033. These parameters were calibrated from a database
that was developed through a study commissioned by the Federal Highway
Administration (FHWA). The purpose of the FHWA study was to relate fuel
consumption and emissions to vehicle speed and acceleration. The vehicles used for the
FHWA study were representative of sixty-four percent of the 1980 to 1992 passenger
vehicle fleet, which included pickup trucks. Fuel consumption and emissions were
determined for each of the vehicles under different operating conditions. The results from
the FHWA study were tables and graphs that relate fuel consumption and emissions to
vehicle speed and acceleration (98).
Due to the disaggregate base of the model proposed in Equation 6.9, it can be used to
compute fuel consumption from speed and acceleration data of individual vehicles, on a
second-by-second basis. As a result of the findings of Chapter 5 that disaggregate
information can provide more accurate results, it was decided to use fuel consumption
computed by individual vehicles on a second-by-second basis as the base case for this
research.
Output from the TRANSIMS model was used to determine the total fuel consumption
of the two test corridors during the analysis period at various levels of aggregation. The
most aggregate scenario considered the total distance traveled, mean speed, mean
acceleration, and mean deceleration of all the vehicles during the analysis period. With a
more disaggregate scenario these parameters were determined for each individual vehicle
separately. These two levels of aggregation were further refined through the inclusion of
spatial disaggregation by dividing the corridors into interchange links. With the most
disaggregate case, the fuel consumption of each vehicle was determined on a second-by-
second basis. This scenario was used as the base case and resulted in 6,026 and 4,852
gallons of fuel consumed during the analysis period for the I-10 and US-290 corridors,
respectively.
Figure 6.3 shows the results of the most aggregate approach (all vehicles combined)
and the most disaggregate approach (each vehicle on a second-by-second basis) for the
various interchange links. It may be seen in this figure that the results from the aggregate
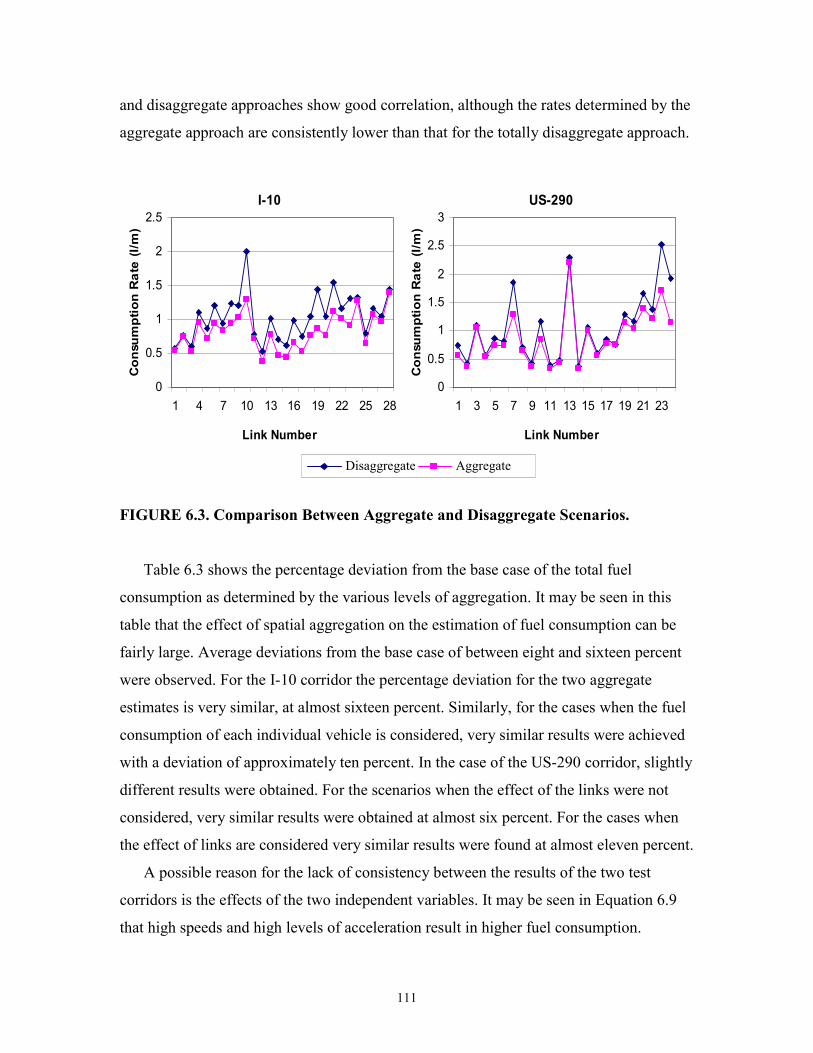
111
and disaggregate approaches show good correlation, although the rates determined by the
aggregate approach are consistently lower than that for the totally disaggregate approach.
FIGURE 6.3. Comparison Between Aggregate and Disaggregate Scenarios.
Table 6.3 shows the percentage deviation from the base case of the total fuel
consumption as determined by the various levels of aggregation. It may be seen in this
table that the effect of spatial aggregation on the estimation of fuel consumption can be
fairly large. Average deviations from the base case of between eight and sixteen percent
were observed. For the I-10 corridor the percentage deviation for the two aggregate
estimates is very similar, at almost sixteen percent. Similarly, for the cases when the fuel
consumption of each individual vehicle is considered, very similar results were achieved
with a deviation of approximately ten percent. In the case of the US-290 corridor, slightly
different results were obtained. For the scenarios when the effect of the links were not
considered, very similar results were obtained at almost six percent. For the cases when
the effect of links are considered very similar results were found at almost eleven percent.
A possible reason for the lack of consistency between the results of the two test
corridors is the effects of the two independent variables. It may be seen in Equation 6.9
that high speeds and high levels of acceleration result in higher fuel consumption.
US-290
0
0.5
1
1.5
2
2.5
3
1 3 5 7 9 11 13 15 17 19 21 23
Link NumberConsumption Rate (l/m)
I-10
0
0.5
1
1.5
2
2.5
1 4 7 10 13 16 19 22 25 28
Link Number
Consumption Rate (l/m)
Disaggregate Aggregate
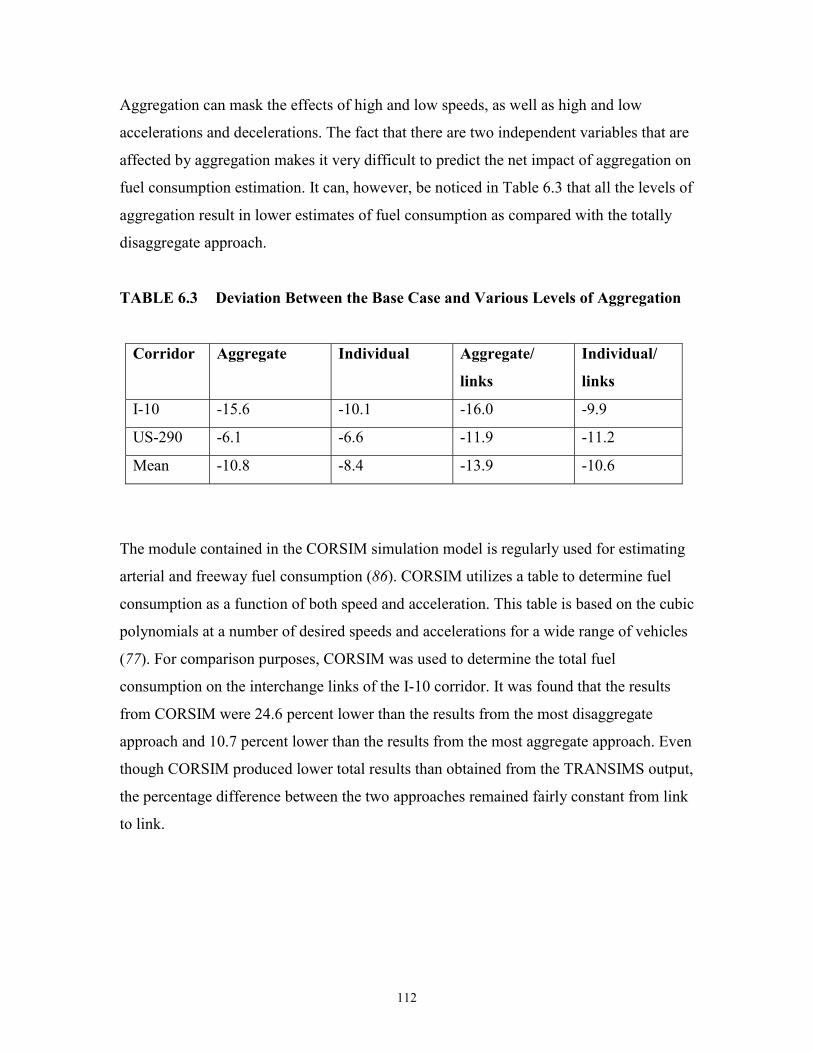
112
Aggregation can mask the effects of high and low speeds, as well as high and low
accelerations and decelerations. The fact that there are two independent variables that are
affected by aggregation makes it very difficult to predict the net impact of aggregation on
fuel consumption estimation. It can, however, be noticed in Table 6.3 that all the levels of
aggregation result in lower estimates of fuel consumption as compared with the totally
disaggregate approach.
TABLE 6.3 Deviation Between the Base Case and Various Levels of Aggregation
Corridor Aggregate Individual Aggregate/
links
Individual/
links
I-10 -15.6 -10.1 -16.0 -9.9
US-290 -6.1 -6.6 -11.9 -11.2
Mean -10.8 -8.4 -13.9 -10.6
The module contained in the CORSIM simulation model is regularly used for estimating
arterial and freeway fuel consumption (86). CORSIM utilizes a table to determine fuel
consumption as a function of both speed and acceleration. This table is based on the cubic
polynomials at a number of desired speeds and accelerations for a wide range of vehicles
(77). For comparison purposes, CORSIM was used to determine the total fuel
consumption on the interchange links of the I-10 corridor. It was found that the results
from CORSIM were 24.6 percent lower than the results from the most disaggregate
approach and 10.7 percent lower than the results from the most aggregate approach. Even
though CORSIM produced lower total results than obtained from the TRANSIMS output,
the percentage difference between the two approaches remained fairly constant from link
to link.
113
CONCLUDING REMARKS
The information used as input into typical emission models traditionally has been
obtained from macroscopic transportation planning models. Over the past ten years,
however, there has been a definite shift to micro-simulation modeling and the use of ITS,
providing numerous possibilities for capturing detailed transportation related information.
These new disaggregate models and data sources provide for alternative ways of
estimating VKT and average speed as important inputs into an emission model such as
MOBILE 5a.
Two scenarios were constructed. In the case of Scenario 1, the average speed and
total distance traveled for all vehicles in each vehicle class were determined for each
spatial and temporal aggregation level. In the case of Scenario 2, the average speed and
distance traveled of each individual vehicle within each vehicle class were determined for
each spatial and temporal aggregation level. In order to have a fixed reference point, the
current state of the practice, namely Scenario 1 applied at the base link level, was used as
the base case.
It was found that all the deviations from the base case are positive, indicating that the
most aggregate scenario (base case) results in lower emissions than results obtained with
the various levels of spatial and temporal disaggregation. It also was found that for this
test corridor larger emission estimates could be obtained if Scenario 2 was used, as
opposed to Scenario 1. Therefore, if the hypothesis is true that Scenario 2 is more
accurate than Scenario 1, the total emissions for the test corridor is higher than what is
estimated through the conventional approach.
TRANSIMS was used to simulate output from loop detectors, AVI technology, and
AVL technology. It was found that the total emissions calculated with loop detector data
were slightly higher than that obtained with the base case. The reason for this is that in
the case of loop detector data the speeds are based on time mean speed and for the base
case they are based on space mean speed. Total emissions calculated with AVI and AVL
technology were very similar and considerably higher than that obtained with the base
case. It is hypothesized that the reason for this is that a large percentage of high emitting
low speeds are not accounted for with the conventional aggregate approach.
114
To illustrate that the results are not related to the type of model used, the analyses
were repeated using CORSIM, and comparable aggregation effects were obtained.
Additionally, the analysis was repeated in another study, using the emissions module
within the EMPRO model and the differences in emission estimation were found to be
comparable with the results of this study. This shows that aggregation can have an
important effect on emission estimation, regardless of the type of simulation or emissions
model used.
It was shown in this study that the level of aggregation of the input data can have an
important effect on the final results. Because emission modeling has a direct bearing on
whether an area is considered to be in attainment or not, it is very important to ensure that
these models are applied in an accurate and consistent way. The shift to micro-simulation
modeling and ITS has created opportunities to use speed and VKT information at
disaggregate levels. There is, therefore, a need to: i) develop emissions models that can
perform adequately at these disaggregate levels, and ii) provide policy guidelines to
ensure consistency of applications.
With regard to noise pollution, the STAMINA model was used to quantify noise
pollution along the corridors at various levels of spatial disaggregation. It was found that
a twenty-two percent improvement could be achieved by using the shorter AVI links
instead of the totally aggregate corridor level as compared with the approach that uses
interchange links. The actual values of the deviations from the approach that uses
interchange links, however, are fairly small, with differences of only 3.9 percent if the
whole corridor is used and 2.9 percent if AVI links are used.
In the case of fuel consumption the effect of spatial aggregation can be fairly large.
Average deviations from the totally disaggregate case (calculated for each vehicle on a
second-by-second basis) of between six and sixteen percent were observed. It was found
that incorporating the effect of the individual vehicles provides slightly better results. For
comparison purposes, CORSIM was used to determine the total fuel consumption on the
interchange links of the I-10 corridor. It was found that even though CORSIM produced
results that were between ten and twenty-five percent lower than the results obtained
from the TRANSIMS output, the percentage difference between the two approaches
remained fairly constant from link to link.

115
The following chapter illustrates a number of applications with performance measures
of sustainable transportation, namely: i) to use the quantified performance measures in
the decision-making process; ii) to use equivalency factors for allocating responsibility
for vehicular emission; and iii) to propose and use a sustainable transportation index to
determine the sustainability of an existing or planned project.

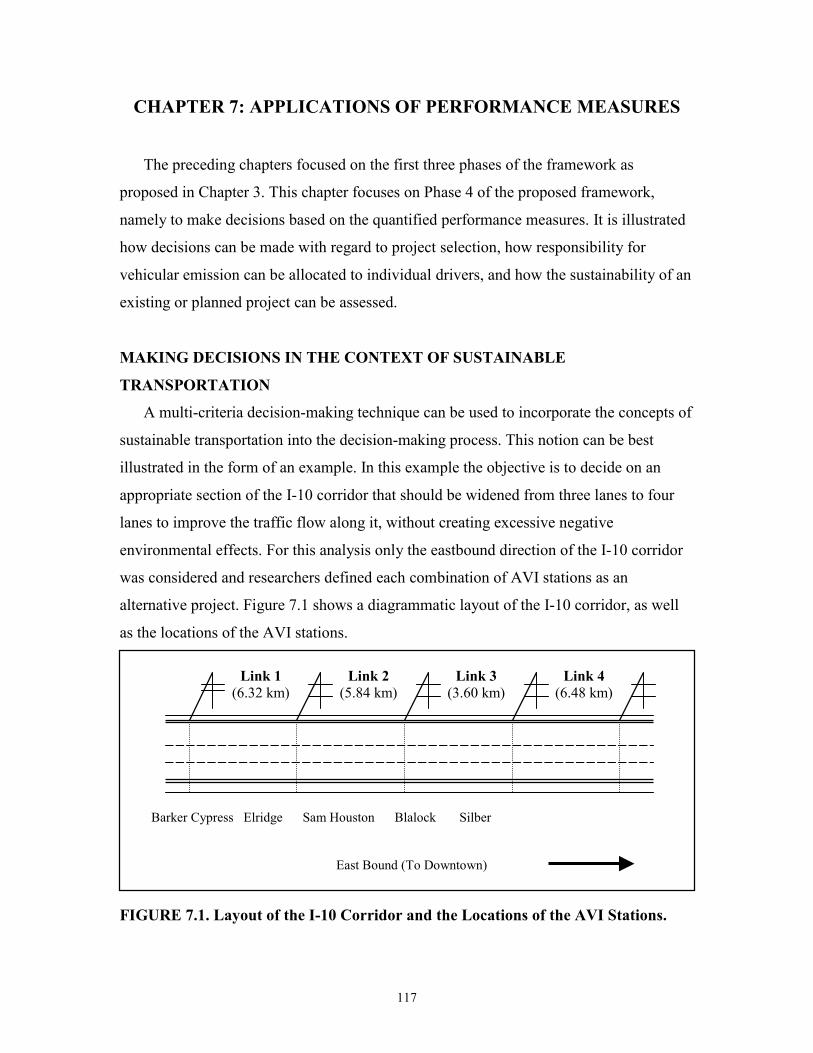
117
CHAPTER 7: APPLICATIONS OF PERFORMANCE MEASURES
The preceding chapters focused on the first three phases of the framework as
proposed in Chapter 3. This chapter focuses on Phase 4 of the proposed framework,
namely to make decisions based on the quantified performance measures. It is illustrated
how decisions can be made with regard to project selection, how responsibility for
vehicular emission can be allocated to individual drivers, and how the sustainability of an
existing or planned project can be assessed.
MAKING DECISIONS IN THE CONTEXT OF SUSTAINABLE
TRANSPORTATION
A multi-criteria decision-making technique can be used to incorporate the concepts of
sustainable transportation into the decision-making process. This notion can be best
illustrated in the form of an example. In this example the objective is to decide on an
appropriate section of the I-10 corridor that should be widened from three lanes to four
lanes to improve the traffic flow along it, without creating excessive negative
environmental effects. For this analysis only the eastbound direction of the I-10 corridor
was considered and researchers defined each combination of AVI stations as an
alternative project. Figure 7.1 shows a diagrammatic layout of the I-10 corridor, as well
as the locations of the AVI stations.
FIGURE 7.1. Layout of the I-10 Corridor and the Locations of the AVI Stations.
Link 1 (6.32 km)
East Bound (To Downtown)
Link 2 (5.84 km)
Link 3 (3.60 km)
Link 4 (6.48 km)
Barker Cypress Elridge Sam Houston Blalock Silber
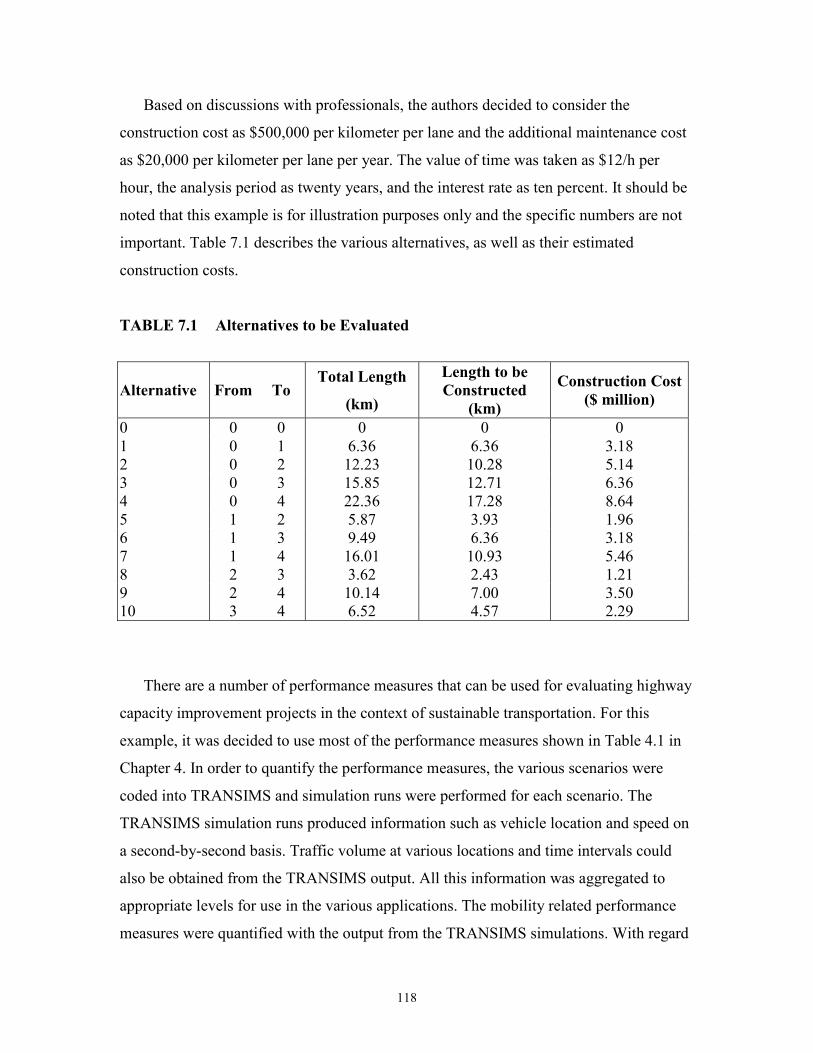
118
Based on discussions with professionals, the authors decided to consider the
construction cost as $500,000 per kilometer per lane and the additional maintenance cost
as $20,000 per kilometer per lane per year. The value of time was taken as $12/h per
hour, the analysis period as twenty years, and the interest rate as ten percent. It should be
noted that this example is for illustration purposes only and the specific numbers are not
important. Table 7.1 describes the various alternatives, as well as their estimated
construction costs.
TABLE 7.1 Alternatives to be Evaluated
Alternative From To Total Length
(km)
Length to be Constructed
(km)
Construction Cost($ million)
0 0 0 0 0 0 1 0 1 6.36 6.36 3.18 2 0 2 12.23 10.28 5.14 3 0 3 15.85 12.71 6.36 4 0 4 22.36 17.28 8.64 5 1 2 5.87 3.93 1.96 6 1 3 9.49 6.36 3.18 7 1 4 16.01 10.93 5.46 8 2 3 3.62 2.43 1.21 9 2 4 10.14 7.00 3.50 10 3 4 6.52 4.57 2.29
There are a number of performance measures that can be used for evaluating highway
capacity improvement projects in the context of sustainable transportation. For this
example, it was decided to use most of the performance measures shown in Table 4.1 in
Chapter 4. In order to quantify the performance measures, the various scenarios were
coded into TRANSIMS and simulation runs were performed for each scenario. The
TRANSIMS simulation runs produced information such as vehicle location and speed on
a second-by-second basis. Traffic volume at various locations and time intervals could
also be obtained from the TRANSIMS output. All this information was aggregated to
appropriate levels for use in the various applications. The mobility related performance
measures were quantified with the output from the TRANSIMS simulations. With regard
119
to the environmental related performance measures, the output from the TRANSIMS
simulations were used as input into the MOBILE 5a and STAMINA models, as well as
the fuel consumption module within FREFLO to quantify the required environmental
related performance measures.
There are many multi-criteria decision-making techniques available. For this analysis
it was decided to use the multi-attribute utility theory (MAUT) approach. This approach
can be performed according to the following steps (99):
• Step 1: Identify the various criteria and sub-criteria to be used in the evaluation
process.
• Step 2: Rank the different criteria and sub-criteria in order of importance.
• Step 3: Rate the different criteria and sub-criteria on a scale from zero to one,
while reflecting the ratio of relative importance of one criterion over the next.
• Step 4: Normalize these weights on a scale from zero to one.
• Step 5: Determine criteria values for each alternative by using single-attribute
utility functions on linear normalized scales.
• Step 6: Calculate the utilities for the alternatives by obtaining the weighted linear
sum for the criteria as shown in Equations 7.1 to 7.3.
Four applications were used to illustrate their effects on the final decision. The first
application uses a pure net present worth analysis performed at the corridor level. A
typical net present worth analysis of this nature would consider a reduction in user travel
time, accidents, and vehicle operating costs as benefits, whereas costs are typically
incurred by the agency and include capital costs, maintenance costs, and salvage value.
Because the proposed projects only involve the addition of a lane and no realignment, the
only benefit considered was a reduction in user travel time, whereas capital costs and
maintenance costs served as the cost components.
The other three applications are based on the MAUT technique and incorporate a
wide range of sustainable transportation performance measures, including net present
worth. The first of these applications is performed at the corridor level and uses aggregate
data in the form of averages over the extent of the corridor. The next application is also
120
performed at the corridor level, but uses disaggregate data at the level of the individual
commuter on a second-by-second basis, where possible. The final application also uses
this disaggregate data but the analysis is performed at a more disaggregate level of spatial
aggregation, namely at the level of the AVI links. The calculation of the net present
worth and the utility values for the aggregate corridor-based, disaggregate corridor-based,
and the disaggregate link-based MAUT approaches are shown as Equations 7.1, 7.2, 7.3,
and 7.4, respectively.
)( MntConXj PPPNPW +−= ∆ (7.1)
)(1 1∑∑
= =
=k skn
k
n
sskjskkj AwwU (7.2)
)(1 1∑∑
= =
=k skn
k
n
sskjskkj DwwU (7.3)
)(1 1 1∑∑∑
= = =
=k sk ln
k
n
s
n
lskjlsklskkj DwwwU (7.4)
where:
NPWj = Net present worth for alternative j
Uj = Utility of alternative j
XP∆ = Present value for time savings
ConP = Present value of construction cost
MntP = Present value of maintenance cost
wk = Weight of criterion k
wsk = Weight of sub-criterion s of criterion k
wskl = Weight of sub-criterion s of criterion k for AVI link l
Askj , Dskj = Normalized sub-criterion value for alternative j based on aggregate
and disaggregate data, respectively. These values can be calculated
121
as follows: )(, skjskskjskj sfDA =
Askjl , Dskjl = Normalized sub-criterion value for alternative j on AVI link l based
on aggregate and disaggregate data, respectively. These values can
be calculated as follows: )(, skjlskskjlskjl sfDA =
sskj = Value of sub-criterion s of criterion k for alternative j
sskjl = Value of sub-criterion s of criterion k for alternative j on AVI link l
)(xf sk = Single-attribute utility function on a normalized scale from 0 to 1
for sub-criterion s of criterion k
The criteria weights were determined by applying professional judgment and
following steps 1 to 4 as discussed above. These weights are shown in Table 7.2. It is
possible to allocate weights to the various sub-criteria within each of the AVI links, as
illustrated in Equation 7.4. This option allows the decision-maker to allocate importance
to certain links in terms of certain criteria. The CBD and surrounding areas of a city
might, for example, be experiencing high levels of air pollution. The decision-maker
would, therefore, allocate heavier weights for vehicular emission to links that are in the
area of high air pollution. For illustration purposes, it was decided to allocate more
importance to the AVI links closer to the CBD. Weights of nine, eighteen, twenty-seven,
and forty-eight percent were allocated to all the criteria within the AVI links, from the
furthest AVI link to the one that is closest to the CBD.
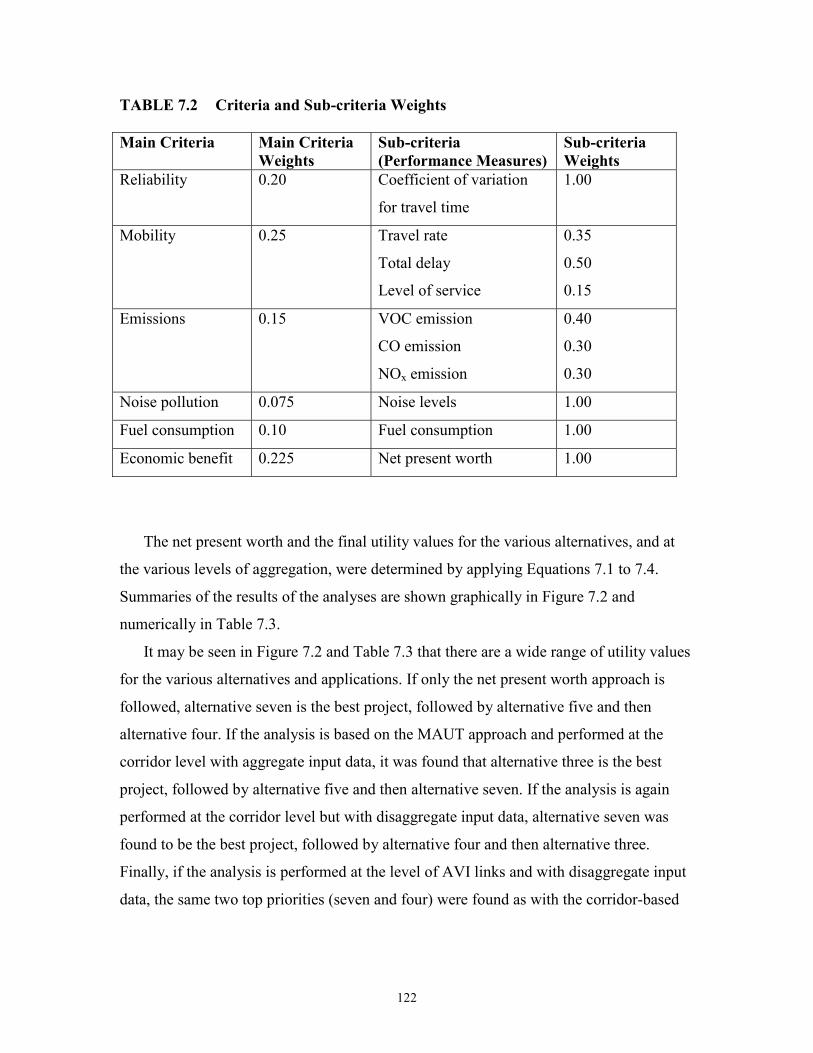
122
TABLE 7.2 Criteria and Sub-criteria Weights Main Criteria Main Criteria
Weights Sub-criteria (Performance Measures)
Sub-criteria Weights
Reliability 0.20 Coefficient of variation
for travel time
1.00
Mobility
0.25 Travel rate
Total delay
Level of service
0.35
0.50
0.15
Emissions
0.15 VOC emission
CO emission
NOx emission
0.40
0.30
0.30
Noise pollution 0.075 Noise levels 1.00
Fuel consumption 0.10 Fuel consumption 1.00
Economic benefit 0.225 Net present worth 1.00
The net present worth and the final utility values for the various alternatives, and at
the various levels of aggregation, were determined by applying Equations 7.1 to 7.4.
Summaries of the results of the analyses are shown graphically in Figure 7.2 and
numerically in Table 7.3.
It may be seen in Figure 7.2 and Table 7.3 that there are a wide range of utility values
for the various alternatives and applications. If only the net present worth approach is
followed, alternative seven is the best project, followed by alternative five and then
alternative four. If the analysis is based on the MAUT approach and performed at the
corridor level with aggregate input data, it was found that alternative three is the best
project, followed by alternative five and then alternative seven. If the analysis is again
performed at the corridor level but with disaggregate input data, alternative seven was
found to be the best project, followed by alternative four and then alternative three.
Finally, if the analysis is performed at the level of AVI links and with disaggregate input
data, the same two top priorities (seven and four) were found as with the corridor-based
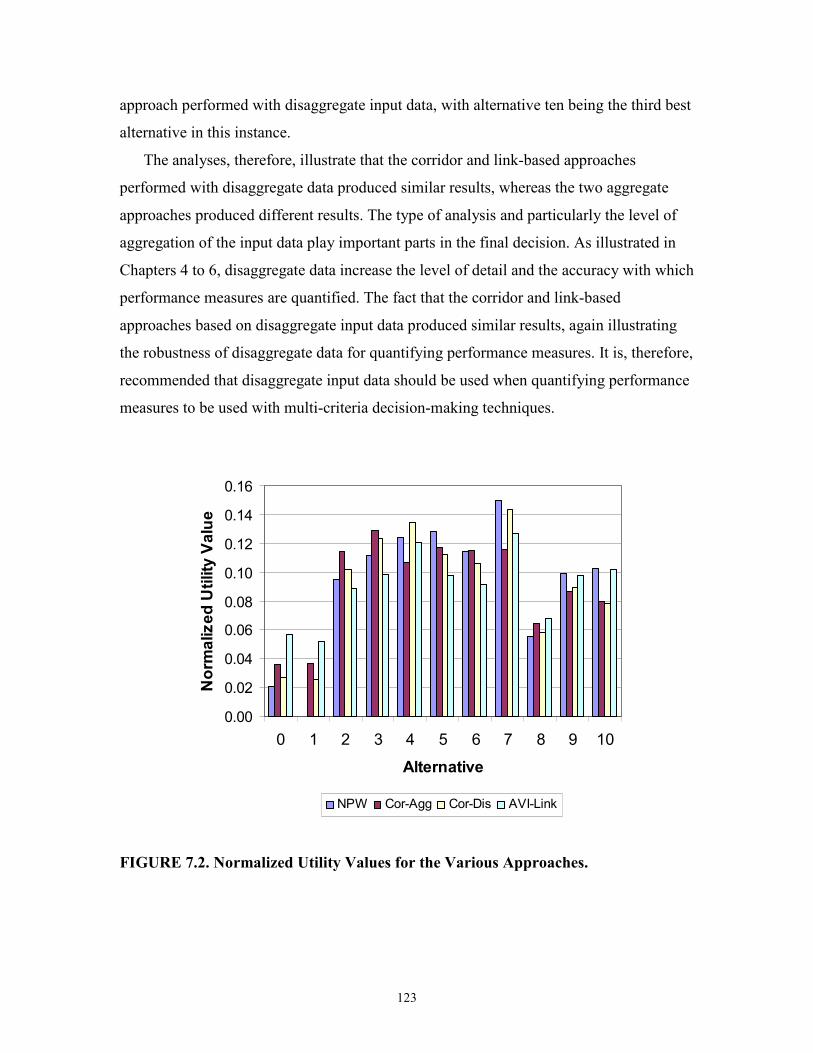
123
approach performed with disaggregate input data, with alternative ten being the third best
alternative in this instance.
The analyses, therefore, illustrate that the corridor and link-based approaches
performed with disaggregate data produced similar results, whereas the two aggregate
approaches produced different results. The type of analysis and particularly the level of
aggregation of the input data play important parts in the final decision. As illustrated in
Chapters 4 to 6, disaggregate data increase the level of detail and the accuracy with which
performance measures are quantified. The fact that the corridor and link-based
approaches based on disaggregate input data produced similar results, again illustrating
the robustness of disaggregate data for quantifying performance measures. It is, therefore,
recommended that disaggregate input data should be used when quantifying performance
measures to be used with multi-criteria decision-making techniques.
FIGURE 7.2. Normalized Utility Values for the Various Approaches.
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0 1 2 3 4 5 6 7 8 9 10
Alternative
Normalized
Utility Value
NPW Cor-Agg Cor-Dis AVI-Link
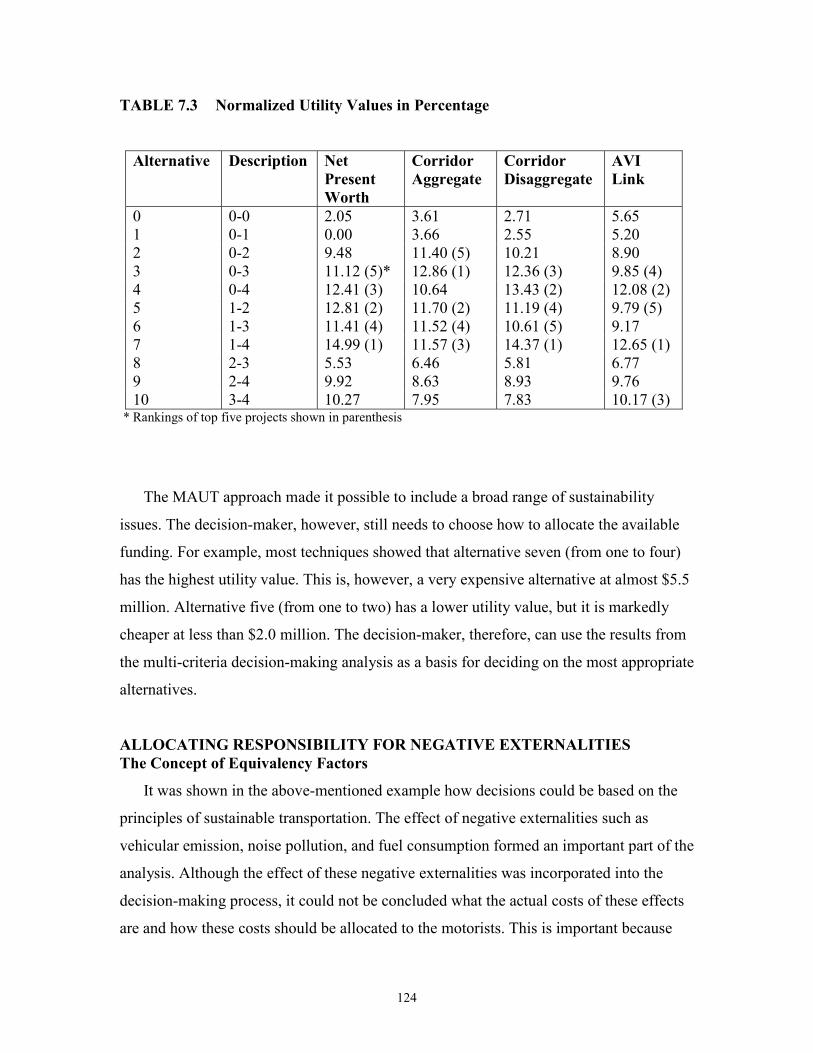
124
TABLE 7.3 Normalized Utility Values in Percentage
Alternative Description Net Present Worth
Corridor Aggregate
Corridor Disaggregate
AVI Link
0 0-0 2.05 3.61 2.71 5.65 1 0-1 0.00 3.66 2.55 5.20 2 0-2 9.48 11.40 (5) 10.21 8.90 3 0-3 11.12 (5)* 12.86 (1) 12.36 (3) 9.85 (4) 4 0-4 12.41 (3) 10.64 13.43 (2) 12.08 (2) 5 1-2 12.81 (2) 11.70 (2) 11.19 (4) 9.79 (5) 6 1-3 11.41 (4) 11.52 (4) 10.61 (5) 9.17 7 1-4 14.99 (1) 11.57 (3) 14.37 (1) 12.65 (1) 8 2-3 5.53 6.46 5.81 6.77 9 2-4 9.92 8.63 8.93 9.76 10 3-4 10.27 7.95 7.83 10.17 (3)
* Rankings of top five projects shown in parenthesis
The MAUT approach made it possible to include a broad range of sustainability
issues. The decision-maker, however, still needs to choose how to allocate the available
funding. For example, most techniques showed that alternative seven (from one to four)
has the highest utility value. This is, however, a very expensive alternative at almost $5.5
million. Alternative five (from one to two) has a lower utility value, but it is markedly
cheaper at less than $2.0 million. The decision-maker, therefore, can use the results from
the multi-criteria decision-making analysis as a basis for deciding on the most appropriate
alternatives.
ALLOCATING RESPONSIBILITY FOR NEGATIVE EXTERNALITIES The Concept of Equivalency Factors
It was shown in the above-mentioned example how decisions could be based on the
principles of sustainable transportation. The effect of negative externalities such as
vehicular emission, noise pollution, and fuel consumption formed an important part of the
analysis. Although the effect of these negative externalities was incorporated into the
decision-making process, it could not be concluded what the actual costs of these effects
are and how these costs should be allocated to the motorists. This is important because

125
the cost of negative externalities is potentially very large and is mostly borne by
individuals or groups other than those whose actions caused the effects.
The concept of equivalency factors, however, can be used to assign responsibility to
motorists for the effects of negative externalities. An equivalency factor is a numerical
value that identifies the relative contribution of different vehicle classes in a given traffic
stream to some physical measure (100). Almost all equivalency factors in engineering are
calculated with respect to some base condition. One of the most commonly used
equivalency factors is a load equivalency factor, which relates relative pavement damage
to axle type and weight. The load equivalency factor has been used for over forty years in
pavement design and cost allocation studies (101,102).
For this research the equivalency concept is extended to vehicular emission by
deriving the factors with respect to a base automobile under specified conditions. The
major advantage of using equivalency factors for vehicular emission is that they can be
developed for vehicle classes, operating under different conditions. The emission of a
vehicle or a homogeneous group of vehicles operating under certain conditions, therefore,
can be determined with equivalency factors without having to re-run the emission model
every time a slightly different scenario is tested. A disadvantage of equivalency factors is
that no benefit can be gained when the analysis is performed at a highly disaggregate
level. In the case of individual vehicles, for example, equivalency factors need to be
developed for each vehicle and each operating condition, which results in no real benefit.
There are two primary means of calculating equivalency factors for vehicular
emissions (EF_pís). The first involves identifying the average ratio of the contribution of
a given vehicle to that of a base vehicle under certain stated conditions. An EF_p may
also be defined with respect to the marginal, rather than the average, contribution of a
particular vehicle class. The EF_p in this instance relates to the number of additional
vehicles of one class required to produce the same amount of pollutants as one vehicle of
a base class, all else remaining equal. The formulation of EF_p in terms of the average
contribution is shown in Equation 7.4 and that of the marginal contribution in Equation
7.5 (94):

126
pB
piBi E
EpEF
_ =−
(7.4)
B
pB
i
pi
Bi
dVdEdVdE
pEF
_ =−
(7.5)
where:
piE
= Emission function of pollutant p for vehicle class i for stated conditions
pBE = Emission function of pollutant p for base class for stated conditions.
The base vehicle class will have attributes of vehicle type, model year,
altitude, kilometers accumulation, speed, et cetera
BipEF −_ = Equivalency factor for pollutant p for given vehicle class i to the base
vehicle class
Vi = Volume of vehicle class i (veh/h)
VB = Volume of base vehicle class B (veh/h)
The decision to use a marginal or average equivalency factor will depend on the
application. Note that, depending on the form of the chosen emission function, both the
average and marginal approaches may result in the same value. In addition, the emission
factor may be a numerical value or a function, depending on the input. In this paper the
average approach was used and the assumptions were such that all factors had numerical
values.
Aggregate Application
For illustration purposes, both an aggregate application and a disaggregate application
are performed. With the aggregate application, the costs associated with vehicular
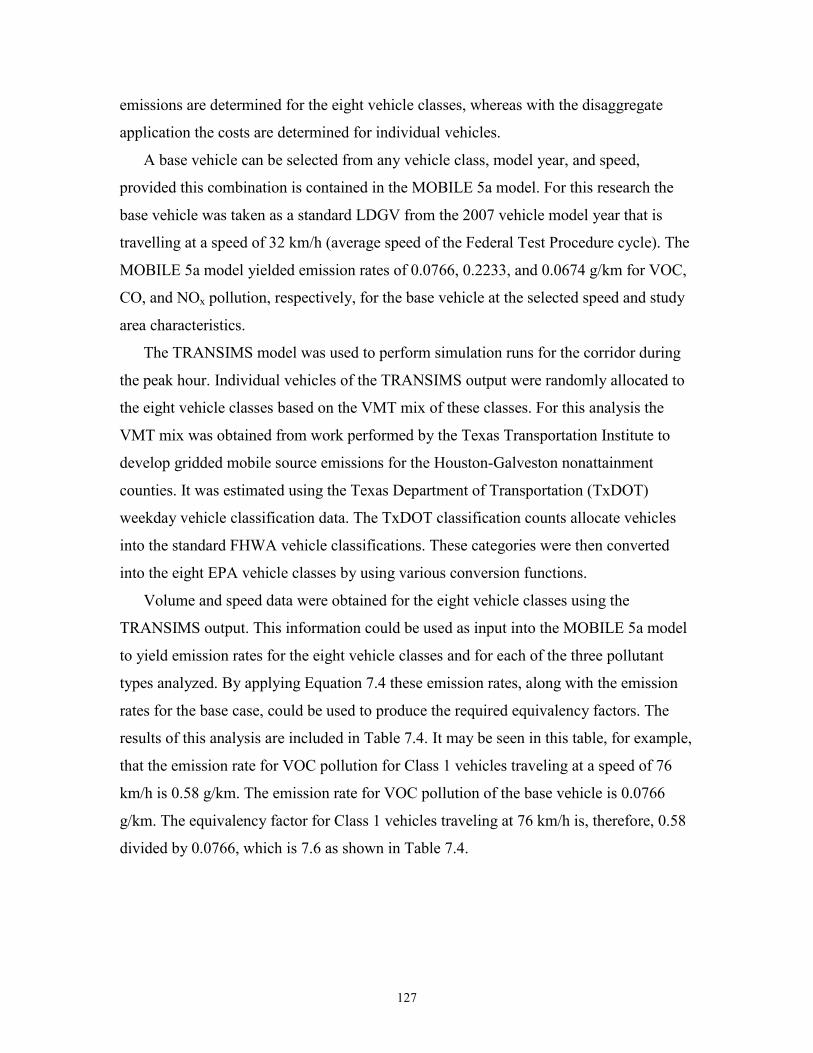
127
emissions are determined for the eight vehicle classes, whereas with the disaggregate
application the costs are determined for individual vehicles.
A base vehicle can be selected from any vehicle class, model year, and speed,
provided this combination is contained in the MOBILE 5a model. For this research the
base vehicle was taken as a standard LDGV from the 2007 vehicle model year that is
travelling at a speed of 32 km/h (average speed of the Federal Test Procedure cycle). The
MOBILE 5a model yielded emission rates of 0.0766, 0.2233, and 0.0674 g/km for VOC,
CO, and NOx pollution, respectively, for the base vehicle at the selected speed and study
area characteristics.
The TRANSIMS model was used to perform simulation runs for the corridor during
the peak hour. Individual vehicles of the TRANSIMS output were randomly allocated to
the eight vehicle classes based on the VMT mix of these classes. For this analysis the
VMT mix was obtained from work performed by the Texas Transportation Institute to
develop gridded mobile source emissions for the Houston-Galveston nonattainment
counties. It was estimated using the Texas Department of Transportation (TxDOT)
weekday vehicle classification data. The TxDOT classification counts allocate vehicles
into the standard FHWA vehicle classifications. These categories were then converted
into the eight EPA vehicle classes by using various conversion functions.
Volume and speed data were obtained for the eight vehicle classes using the
TRANSIMS output. This information could be used as input into the MOBILE 5a model
to yield emission rates for the eight vehicle classes and for each of the three pollutant
types analyzed. By applying Equation 7.4 these emission rates, along with the emission
rates for the base case, could be used to produce the required equivalency factors. The
results of this analysis are included in Table 7.4. It may be seen in this table, for example,
that the emission rate for VOC pollution for Class 1 vehicles traveling at a speed of 76
km/h is 0.58 g/km. The emission rate for VOC pollution of the base vehicle is 0.0766
g/km. The equivalency factor for Class 1 vehicles traveling at 76 km/h is, therefore, 0.58
divided by 0.0766, which is 7.6 as shown in Table 7.4.
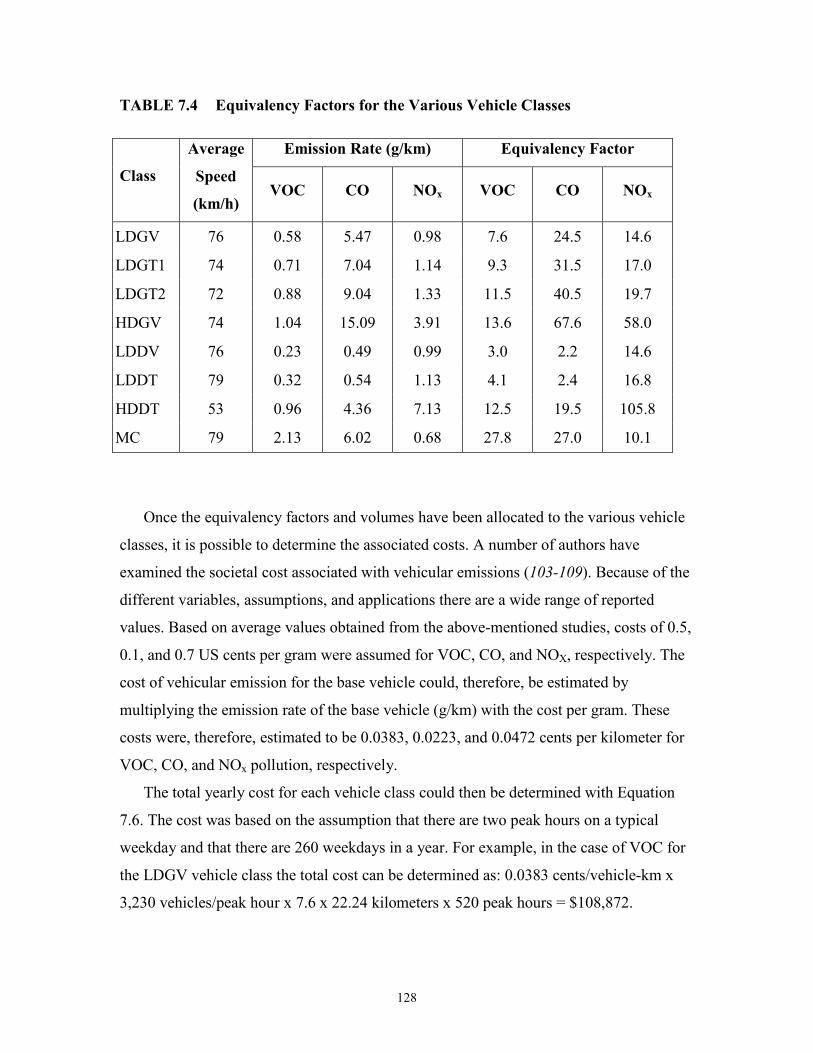
128
TABLE 7.4 Equivalency Factors for the Various Vehicle Classes
Emission Rate (g/km) Equivalency Factor
Class
Average
Speed
(km/h) VOC CO NOx VOC CO NOx
LDGV 76 0.58 5.47 0.98 7.6 24.5 14.6
LDGT1 74 0.71 7.04 1.14 9.3 31.5 17.0
LDGT2 72 0.88 9.04 1.33 11.5 40.5 19.7
HDGV 74 1.04 15.09 3.91 13.6 67.6 58.0
LDDV 76 0.23 0.49 0.99 3.0 2.2 14.6
LDDT 79 0.32 0.54 1.13 4.1 2.4 16.8
HDDT 53 0.96 4.36 7.13 12.5 19.5 105.8
MC 79 2.13 6.02 0.68 27.8 27.0 10.1
Once the equivalency factors and volumes have been allocated to the various vehicle
classes, it is possible to determine the associated costs. A number of authors have
examined the societal cost associated with vehicular emissions (103-109). Because of the
different variables, assumptions, and applications there are a wide range of reported
values. Based on average values obtained from the above-mentioned studies, costs of 0.5,
0.1, and 0.7 US cents per gram were assumed for VOC, CO, and NOX, respectively. The
cost of vehicular emission for the base vehicle could, therefore, be estimated by
multiplying the emission rate of the base vehicle (g/km) with the cost per gram. These
costs were, therefore, estimated to be 0.0383, 0.0223, and 0.0472 cents per kilometer for
VOC, CO, and NOx pollution, respectively.
The total yearly cost for each vehicle class could then be determined with Equation
7.6. The cost was based on the assumption that there are two peak hours on a typical
weekday and that there are 260 weekdays in a year. For example, in the case of VOC for
the LDGV vehicle class the total cost can be determined as: 0.0383 cents/vehicle-km x
3,230 vehicles/peak hour x 7.6 x 22.24 kilometers x 520 peak hours = $108,872.
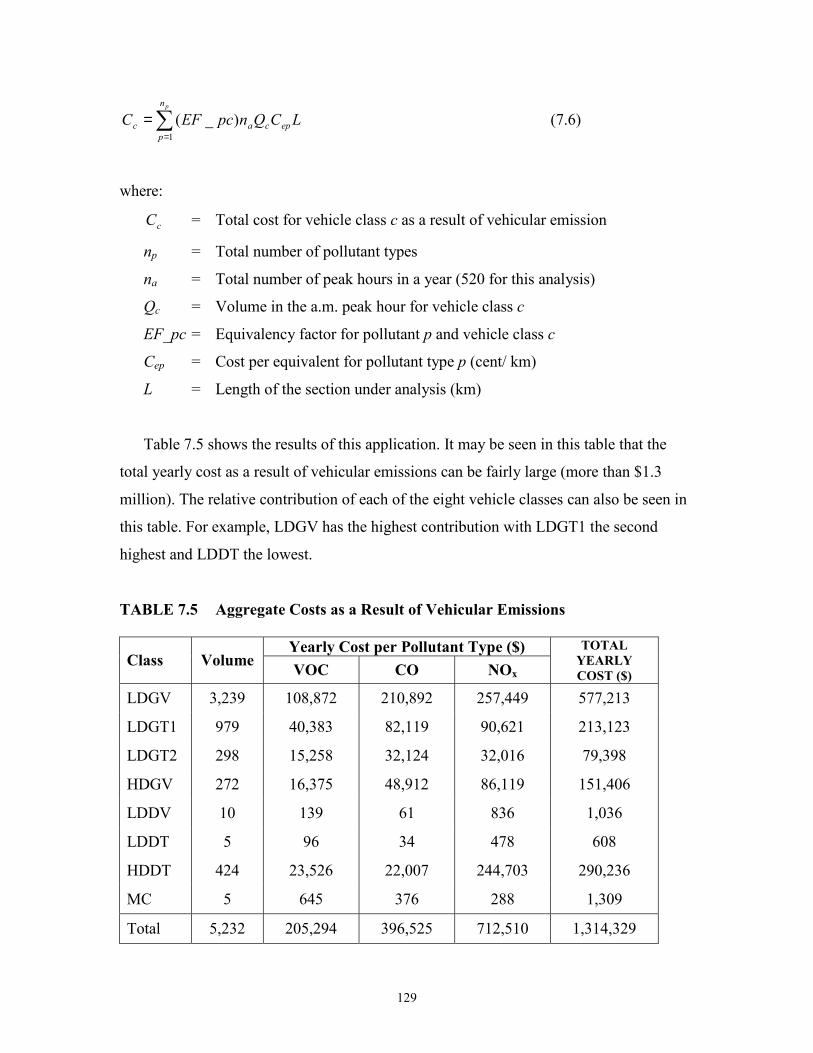
129
∑=
=pn
pepcac LCQnpcEFC
1
)_( (7.6)
where:
cC = Total cost for vehicle class c as a result of vehicular emission
np = Total number of pollutant types
na = Total number of peak hours in a year (520 for this analysis)
Qc = Volume in the a.m. peak hour for vehicle class c
EF_pc = Equivalency factor for pollutant p and vehicle class c
Cep = Cost per equivalent for pollutant type p (cent/ km)
L = Length of the section under analysis (km)
Table 7.5 shows the results of this application. It may be seen in this table that the
total yearly cost as a result of vehicular emissions can be fairly large (more than $1.3
million). The relative contribution of each of the eight vehicle classes can also be seen in
this table. For example, LDGV has the highest contribution with LDGT1 the second
highest and LDDT the lowest.
TABLE 7.5 Aggregate Costs as a Result of Vehicular Emissions
Yearly Cost per Pollutant Type ($) Class Volume VOC CO NOx
TOTAL YEARLY COST ($)
LDGV 3,239 108,872 210,892 257,449 577,213
LDGT1 979 40,383 82,119 90,621 213,123
LDGT2 298 15,258 32,124 32,016 79,398
HDGV 272 16,375 48,912 86,119 151,406
LDDV 10 139 61 836 1,036
LDDT 5 96 34 478 608
HDDT 424 23,526 22,007 244,703 290,236
MC 5 645 376 288 1,309
Total 5,232 205,294 396,525 712,510 1,314,329

130
Disaggregate Application
Data collection techniques such as AVI and micro-simulation models such as
TRANSIMS make it possible to keep track of individual vehicles over space and time.
This ability allows the planner to determine equivalency factors at a disaggregate or
individual vehicle level. For this analysis, equivalency factors were used to determine the
emissions cost associated with commuters.
The concept is illustrated by using the observed AVI data that were obtained for the I-
10 corridor. The mean speeds and number of trips undertaken by individual vehicles
could be determined with the AVI data. For illustration purposes, three randomly selected
regular commuters were chosen for this analysis.
To illustrate the effect of equivalency factors, vehicle one was considered as a light
passenger car (LDGV), vehicle two as a light-duty gasoline fueled truck with a gross
weight between 6,000 and 8,500 pounds (LDGT2), and vehicle three as a heavy-duty
diesel truck with a gross weight over 8,500 pounds (HDDT). In addition, vehicle one was
assumed to be a 2000 model year, whereas vehicles two and three were assumed to be
1995 and 1990 model year vehicles, respectively. October 19, 1996, was selected as
analysis day because on that day all three vehicles made trips along the full extent of the
corridor and were detected at each of the five AVI stations.
MOBILE 5a was again used to produce the required emission rates for the various
vehicle classes, model years, and speeds. Equivalency factors, therefore, could be
determined for each vehicle, on each of the AVI links, and for each pollutant type. The
costs as a result of vehicular emissions for the three test vehicles could be determined by
multiplying the equivalency factor with the cost per equivalent and the length of the AVI
link, as shown in Equation 7.7.
∑∑∑= = =
=k l pn
k
n
ll
n
plepj LCpjdlEFC
1 1
)_( (7.7)
where:
jC = Total cost for vehicle j during the month under analysis
np = Total number of pollutant types
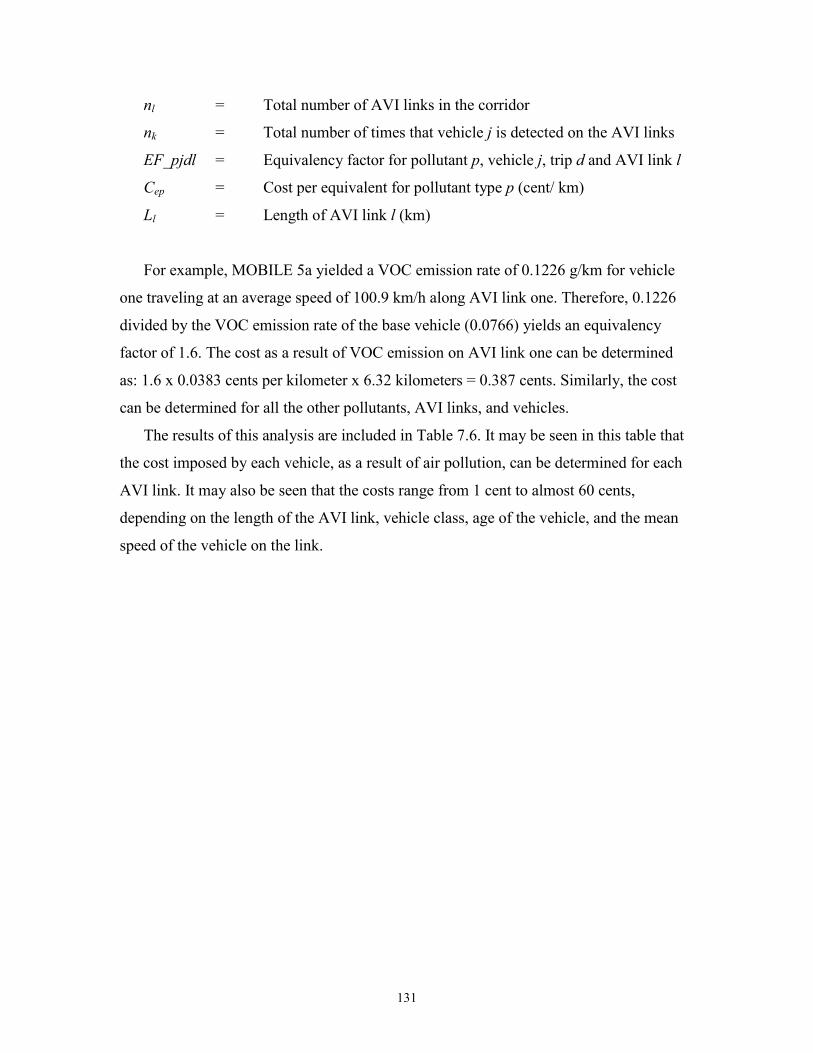
131
nl = Total number of AVI links in the corridor
nk = Total number of times that vehicle j is detected on the AVI links
EF_pjdl = Equivalency factor for pollutant p, vehicle j, trip d and AVI link l
Cep = Cost per equivalent for pollutant type p (cent/ km)
Ll = Length of AVI link l (km)
For example, MOBILE 5a yielded a VOC emission rate of 0.1226 g/km for vehicle
one traveling at an average speed of 100.9 km/h along AVI link one. Therefore, 0.1226
divided by the VOC emission rate of the base vehicle (0.0766) yields an equivalency
factor of 1.6. The cost as a result of VOC emission on AVI link one can be determined
as: 1.6 x 0.0383 cents per kilometer x 6.32 kilometers = 0.387 cents. Similarly, the cost
can be determined for all the other pollutants, AVI links, and vehicles.
The results of this analysis are included in Table 7.6. It may be seen in this table that
the cost imposed by each vehicle, as a result of air pollution, can be determined for each
AVI link. It may also be seen that the costs range from 1 cent to almost 60 cents,
depending on the length of the AVI link, vehicle class, age of the vehicle, and the mean
speed of the vehicle on the link.
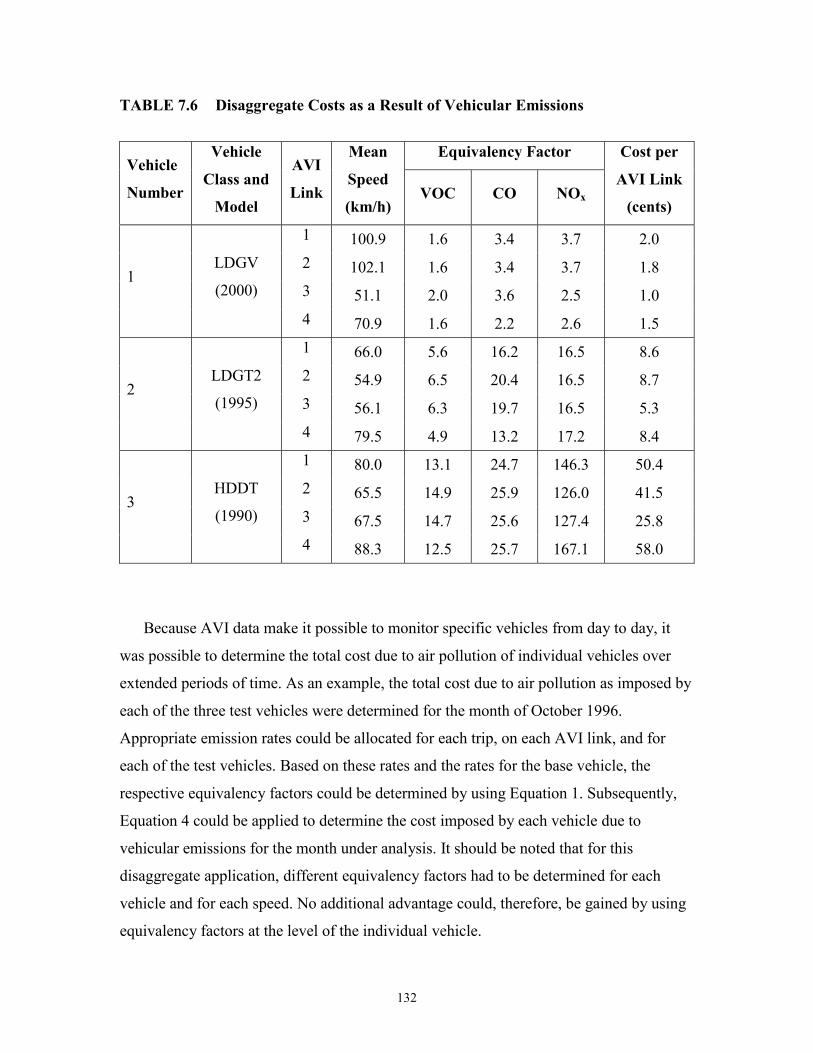
132
TABLE 7.6 Disaggregate Costs as a Result of Vehicular Emissions
Equivalency Factor
Vehicle
Number
Vehicle
Class and
Model
AVI
Link
Mean
Speed
(km/h) VOC CO NOx
Cost per
AVI Link
(cents)
1 100.9 1.6 3.4 3.7 2.0 2 102.1 1.6 3.4 3.7 1.8 3 51.1 2.0 3.6 2.5 1.0
1 LDGV
(2000)
4 70.9 1.6 2.2 2.6 1.5 1 66.0 5.6 16.2 16.5 8.6 2 54.9 6.5 20.4 16.5 8.7 3 56.1 6.3 19.7 16.5 5.3
2 LDGT2
(1995)
4 79.5 4.9 13.2 17.2 8.4 1 80.0 13.1 24.7 146.3 50.4 2 65.5 14.9 25.9 126.0 41.5 3 67.5 14.7 25.6 127.4 25.8
3 HDDT
(1990)
4 88.3 12.5 25.7 167.1 58.0
Because AVI data make it possible to monitor specific vehicles from day to day, it
was possible to determine the total cost due to air pollution of individual vehicles over
extended periods of time. As an example, the total cost due to air pollution as imposed by
each of the three test vehicles were determined for the month of October 1996.
Appropriate emission rates could be allocated for each trip, on each AVI link, and for
each of the test vehicles. Based on these rates and the rates for the base vehicle, the
respective equivalency factors could be determined by using Equation 1. Subsequently,
Equation 4 could be applied to determine the cost imposed by each vehicle due to
vehicular emissions for the month under analysis. It should be noted that for this
disaggregate application, different equivalency factors had to be determined for each
vehicle and for each speed. No additional advantage could, therefore, be gained by using
equivalency factors at the level of the individual vehicle.

133
It was found that vehicle one made twelve trips and resulted in a cost of only $0.88,
vehicle two made thirteen trips and resulted in a cost of $5.55, whereas vehicle three only
made seven trips but resulted in a cost of $11.72. Vehicle one, which is a new passenger
car traveling at fairly high speeds, resulted in very low emissions as compared to vehicle
three, which is a 10-year-old heavy-duty diesel truck, traveling at much lower speeds.
Note that all of these results would change if different assumptions were used regarding
the costs of vehicular emissions. The important point is that this methodology allows the
allocation of responsibility at both the aggregate and disaggregate levels. In addition, this
type of approach can be extended to form the basis of congestion pricing, which is seen
as a very important strategy to curb congestion.
CONCLUDING REMARKS Although most transportation projects are evaluated in terms of their costs and
benefits through net present worth analyses, the public is mostly concerned with issues
related to sustainability such as equity, safety, and the environment. The penultimate
phase of the proposed framework is to make decisions based on quantified performance
measures. It was shown that a multi-criteria decision-making technique can be used to
incorporate the concepts of sustainable transportation into the decision-making process.
The MAUT approach was selected to analyze eleven scenarios for the widening the I-10
corridor from three lanes to four lanes. It was illustrated that project selection could be
markedly different if a broad range of sustainable transportation principles is considered
instead of pure economic benefit. The level of aggregation of the input data also made a
noticeable difference in the final project selection. The effect of analyzing the data at the
level of AVI links as opposed to the whole corridor allowed for more flexibility in the
allocation of weights as well as greater accuracy in the results.
The concept of equivalency factors can be used to assign responsibility to motorists
for the effects of negative externalities. Equivalency factors could be used to assist in
determining the costs imposed by vehicles due to vehicular emission On an aggregate
level the total yearly cost imposed by each of the eight vehicle classes could be
determined. For the disaggregate analysis, AVI data and equivalency factors could be
used to determine the cost imposed by individual vehicles. These costs could be

134
determined on a trip-by-trip basis as well as for extended periods of time, such as a full
month. It was found for example, that a ten-year-old heavy-duty diesel truck that made
seven trips during the month imposed a cost of $11.72 as a result of air pollution, whereas
a new passenger car that made twelve trips imposed a cost of only $0.88. Such
applications can be used as a basis for further research into strategies such as congestion
pricing to assist in achieving the sustainability goals of social equity and economic
development. It should be noticed that because equivalency factors had to be determined
for each vehicle and each speed, no additional advantage could be gained by using
equivalency factors at the level of the individual vehicle.

135
CHAPTER 8: CONCLUSIONS AND FUTURE RESEARCH
CONCLUSIONS
The scope of the research was such that the methodologies developed are of a generic
nature that can be applied at both the local and network wide levels, as well as for a wide
range of sustainable transportation performance measures. The applications, however,
focused on mobility and environmental related performance measures for freeway
corridors. The following are the more important findings:
• While numerous qualitative studies have been performed on sustainable
transportation there has been little quantitative research and/or implementation of
sustainable transportation concepts. The main reasons for this are related to a lack
of understanding of sustainable transportation and a lack of quantified
performance measures.
• The state of the practice of models to quantify performance is to base their
information on aggregate data sets. Important shortcomings of this approach are
the inaccuracies due to a loss in detail and the effect of aggregation bias. The
latest state of the art in transportation modeling and data collection techniques,
however, make it possible to quantify performance measures at the individual
level, as well as a wide range of spatial and temporal aggregation.
• A framework on how to identify, quantify, and use performance measures for
sustainable transportation in the transportation planning process was proposed.
The framework comprises the following five phases that are interlinked to ensure
adequate feedback and information flow: i) identifying performance measures; ii)
database development; iii) quantifying performance measures; iv) decision-
making; and v) implementation.
• It was illustrated that forty percent of the regular commuterís travel times are
statistically different to the state of the practice aggregate estimates. This result
has significant implications for sustainability analysis and ATIS applications.
136
• In the case of travel time variability it was found that in approximately twenty
percent of the cases the travel time standard deviations of the regular commuters
are statistically different to the state of the practice aggregate estimates.
• On a link basis it was found that travel times between links are almost exclusively
positively correlated with only five percent of the observations indicating negative
correlations. The results from analyzing link travel times of individual commuters
on a trip-by-trip basis, however, revealed that individual commuters show great
variability in travel behavior as evidenced by the fact that large tendencies to
having both faster and slower link travel times than the aggregate estimates were
observed.
• A number of different types of disaggregation can be considered, namely spatial,
temporal, combined spatial and temporal, and the individual level. The individual
level can be used as a separate level of disaggregation or in combination with
spatial and/or temporal disaggregation. Spatial and temporal disaggregation can
each be applied at different levels of detail and can be defined by the segment
lengths and time interval lengths, respectively.
• The TRANSIMS simulation model was used to quantify a wide range of mobility
related performance measures at various levels of spatial and temporal
disaggregation. The uniform kernel estimator was used to smooth the erratic
individual speed profiles produced by the TRANSIMS micro-simulator.
• The smoothed speed profiles from the TRANSIMS micro-simulator were used
with the MOBILE 5a model to produce vehicular emissions of individual vehicles
on a wide range of levels of aggregation. It was shown that the effect of
aggregation bias can be as much as twenty percent in some instances.
• Applications such as loop detectors, AVI technology, and AVL technology could
be simulated with TRANSIMS output. It was found that data from loop detectors
resulted in estimates that are considerably lower than that with AVI and AVL
technology. It is hypothesized that the reason for this is that a large percentage of
high emitting low speeds are not accounted for with the conventional aggregate
approach.
137
• A comparison was made between results with smoothed and unsmoothed speed
profiles. It was found that both profiles produce very similar results with
differences of less than eleven percent for all pollutant types.
• With regard to noise pollution it was found that a twenty-two percent
improvement could be achieved by using the shorter AVI links instead of the
totally aggregate corridor level, as compared with the approach that uses
interchange links. The actual values of the deviations from the approach that uses
interchange links, however, were fairly small, with values of only 3.9 percent if
the whole corridor is used and 2.9 percent if AVI links are used.
• In the case of fuel consumption the effect of spatial aggregation can be fairly
large. Average deviations from the totally disaggregate case (calculated for each
vehicle on a second-by-second basis) of between six and sixteen percent were
observed. It was found that incorporating the effect of the individual vehicles
provides slightly better results.
• It was illustrated that project selection could be markedly different if a broad
range of sustainable transportation principles is considered instead of pure
economic benefit. The level of aggregation of the input data also made a
noticeable difference in the final project selection. The effect of analyzing the
data at the level of AVI links as opposed to the whole corridor allowed for more
flexibility in the allocation of weights, as well as greater accuracy in the results.
• It was shown that the concept of equivalency factors can be used to assign
responsibility to motorists for the effects of negative externalities. Equivalency
factors could be used to allocate costs on both an aggregate and a disaggregate
level. Such applications can be used as a basis for further research into strategies
such as congestion pricing to assist in achieving the sustainability goals of social
equity and economic development.
FUTURE RESEARCH
This research area that deals with the quantification of performance measures for
sustainable transportation is still relatively uncultivated. Numerous opportunities for
further research exist due to new modeling and data collection technologies that make it
138
possible to quantify performance measures for sustainable transportation at the
disaggregate level. The following needs for future research have been identified:
• For this research the steps of the proposed framework were applied to freeway
corridors. The techniques can, however, be applied to a broad range of
transportation infrastructure. They can also be applied to geographic areas that are
larger than corridors, such as cities and regions. A broader range of applications
can be used to confirm the findings of this research and to obtain results for
different scenarios.
• For this research, AVI data and simulated data were used for quantifying the
performance measures. There are various other types of technologies available
that can also provide travel data at the disaggregate level. These technologies
include global positioning systems, satellite surveillance, AVL technology,
cellular phone technology, and various types of vehicle mounted transponders.
The implications and benefits of using such technologies for quantifying
performance measures for sustainable transportation should, therefore, be tested.
• The current state of the practice in calculating vehicular emission is based on
aggregate data sets that are used in emission models. Current simulation models
make it possible to produce disaggregate data sets for use in emission models. The
effect of aggregation bias, therefore, can be determined for applications in major
metropolitan areas. This is important because such areas are currently classified in
terms of attainment based on approaches that are prone to aggregation bias.
• It was illustrated how equivalency factors and disaggregate data sets can be used
to determine the costs imposed by vehicles as a result of vehicular emission.
These techniques need to be expanded by using more comprehensive data sets and
should also be expanded to a broader range of externalities. Such applications can
then form the basis for further research into congestion pricing strategies.
• Very little work has been done on developing an index for sustainable
transportation. There is a need to augment existing work to develop an index or
indices that would make it possible to compare the degree of sustainability
between projects, communities, cities, and even countries.
139
• It was shown in this research that the travel time and the travel time variability of
regular commuters were mostly lower than that of the aggregate estimates. These
findings can have important implications in quantifying sustainable transportation
performance measures for such commuters. A detailed study needs to be
conducted by comparing the travel characteristics of regular commuters versus
that of the general travelers.
• It was found in this research that link travel times on an aggregate level are
mostly positively correlated, whereas link travel times for individual commuters
on a trip-by-trip basis were found to be mostly negatively correlated. This slow-
fast travel pattern of individual commuters needs to be studied further, because it
has implications for modeling various effects such as emissions, noise, and fuel
consumption.

140
141
CHAPTER 9: REFERENCES
1. Environmental Externalities and Social Costs of Transportation Systems: Measurement, Mitigation and Costing: An Annotated Bibliography. Federal Railroad Administration, U.S. Department of Transportation, Office of Policy, Washington D.C., August 1993.
2. Haq, G. Towards Sustainable Transportation Planning: A Comparison Between Britain and the Netherlands. Avebury, Aldershot, England, 1997.
3. Nationwide Personal Transportation Survey (NPTS). Federal Highway Administration, U.S. Department of Transportation, Office of Information, Washington D.C., 1995.
4. World Commission on Environment and Development (Brundtland Commission). Our Common Future. Oxford University Press, Oxford, England, 1987.
5. Presidentís Council on Sustainable Development. http://www.whitehouse.gov/PCSD/CSD. Accessed June 1999.
6. Spaethling, D. Sustainable Transportation: The American Experience. Proceedings of Seminar C: Planning for Sustainability of the 24th European Transport Forum, PTRC Education and Research Services Ltd., London, England, September 1996.
7. Litman, T. Issues in Sustainable Transportation. Victoria Transportation Policy Institute, Victoria, Canada, December 1999.
8. Lindquist, E. Moving Toward Sustainability: Transforming a Comprehensive Land Use and Transportation Plan. In Transportation Research Record 1617, Transportation Research Board, National Research Council, Washington D.C., 1998, pp. 1-9.
9. Masser, I., O. Sviden, and M. Wegener, Transport Planning for Equity and Sustainability. Transportation Planning and Technology, Vol. 17, Gordon and Breach Science Publishers, Loughborough, England, 1993, pp. 319-330.
10. Peake, S., and C. Hope. Sustainable Mobility in Context: Three Transport Scenarios for the UK. Transport Policy, Vol. 3, Butterworth-Heinemann Ltd, Oxford, England, 1994, pp. 195-207.
11. Reid, D. Sustainable Development: An Introductory Guide. Earthscan Publications Ltd., London, England, 1995.
12. Dittmar, H. Thinking Like a System: Sustainability Through Transportation Technology. ITS Quarterly, Vol. 4, No. 1, Washington D.C., Winter 1996, pp. 19-26.
13. Akinyema, E. O. A Total Performance Approach to Traffic Management for Sustainable Development of Communities in Third World Cities. Proceedings of the National Conference held in Tampa Florida on Transportation and Sustainable Communities, Institute of Transportation Engineers, Washington D.C., 1997.
142
14. Mickelson, R. P. Synthesis of Highway Practice 267: Transportation Development Process. National Cooperative Highway Research Program, Transportation Research Board, National Research Council, Washington D.C., 1998.
15. Gatersleben, B. Sustainable Transportation and Quality of Life. Proceedings of the Conference on Social Change and Sustainable Transportation (SCAST), held at the University of California at Berkeley, March 1999.
16. Transportation and Sustainable Communities Initiative: Overview of Federal Sustainable Transportation Activities. National Science and Technology Council, Subcommittee on Transportation Research and Development, Washington D.C., June 1998.
17. Sustainability Indicators: The Transportation Sector. Ontario Roundtable on Environment and Economy, IndEco Report 94029, Toronto, Canada, September 1995.
18. National Transportation System Performance Measures. Report Prepared for the Office of the Secretary of the U.S. Department of Transportation, Washington D.C., April 1996.
19. Gardner, K., and J. Carlsen. Performance Indicators for Sustainable Transport in London. Proceedings of Seminar C: Planning for Sustainability, PTRC European Transport Forum, Brunel University, England, September 1996.
20. A Guide to Metropolitan Transportation Planning Under ISTEA ñ How the Pieces Fit Together. Federal Transit Administration, U.S. Department of Transportation, Washington D.C., 1997.
21. TEA-21: Moving Americans into the 21st Century, U.S. Department of Transportation. http://www.fhwa.dot.gov/tea21/index.htm. Accessed January 1999.
22. Codd, N., and C. M. Walton. Performance Measures and Framework for Decision Making Under the National Transportation System. In Transportation Research Record 1518, Transportation Research Board, National Research Council, Washington D. C., 1996, pp.70-77.
23. Zietsman, J. and L.R. Rilett. Analysis of Aggregation Bias in Vehicular Emission Estimation Using TRANSIMS Output. In Transportation Research Record 1750, Transportation Research Board, National Research Council, Washington D.C., 2001, pp 56-63.
24. Ortuzar, J de D., and L. G. Willumsen. Modelling Transport: Second Edition. John Wiley and Sons, New York, December 1995.
25. Smith, L., R. Beckman, D. Anson, K. Nagel, and M.E. Williams. TRANSIMS: Transportation Analysis and Simulation System. Proceedings of the Fifth National Conference on Transportation Planning Methods and Applications held in Seattle, April 1995.
143
26. Alexander, E. R., E. A. Beimborn, C.V. Patton, and L. P. Witzling. Multi-Objective Decision Making for Transportation. Bureau of Policy & Planning, Wisconsin Department of Transportation, Milwaukee, Wisconsin, November 1985.
27. Meyer, M. D., and E. J. Miller. Urban Transportation Planning: A Decision-Oriented Approach. McGraw-Hill, New York, 1984.
28. Nijkamp, P. Roads Towards Environmentally Sustainable Transport. Transportation Research Part A. Vol. 28A, No. 4, Elsevier Science Ltd., Oxford, England, 1994, pp. 261-271.
29. Litman, T. Sustainable Transportation Indicators. Victoria Transportation Policy Institute, Victoria, Canada, July 1997.
30. Ewing, R. Beyond Speed: The Next Generation of Transportation Service Standards. Annual meeting of the Institute of Transportation Engineers, Compendium of Technical Papers, Washington D.C., 1992.
31. Pratt, R. H., and Lomax T. J. Performance Measures for Multimodal Transportation Systems. In Transportation Research Record 1518, Transportation Research Board, National Research Council, Washington D. C., 1996, pp. 85-93.
32. The ì Sî Factor: Increasingly, Companies are Viewing Sustainability as a Business Issue. The Hands-on Journal for Environmentally Conscious Companies, Washington D.C., June 1998, pp. 1-8.
33. Mckee, M., T. W. Morgan, R. Narayanan, and A. B. Bishop. A Methodology for Public-Planner Interaction in Multiobjective Project Planning and Evaluation. Water Resources Planning Series, Utah State University, Logan, Utah, December 1981.
34. Toward a Sustainable Future: Addressing the Long-Term Effects of Motor Vehicle Transportation on Climate and Ecology. Special Report 251, Transportation Research Board, National Research Council, Washington D.C., 1997.
35. Towards Sustainable Transportation. Proceedings of OECD Conference, Vancouver, Canada, March 1996.
36. Livable Communities. http://www.house.gov/blumenauer/livable.htm. Accessed November 1999.
37. Ruckelshaus, W. D. Toward a Sustainable World. Scientific American, No. 261, New York, 1989, pp.166-170.
38. Pearce, D. Blueprint 3: Measuring Sustainable Development. Earthscan, London England, 1993.
39. Sustainable Transportation: Priorities for Policy Reform. The World Bank, Washington D.C., 1996.
144
40. Towards a Sustainable Future. Special Report 251, Transportation Research Board, National Research Council, Washington D.C., 1997.
41. European Foundation for the Improvement of Living and Working Conditions. http://susdev.eurofound.ie. Accessed January 2000.
42. Moving on Sustainable Transportation (MOST). http://www.tc.gc.ca/envaffairs/most. Accessed January 2000.
43. Sperling, D., and S. A. Shaheen. Transportation and Energy: Strategies for a Sustainable Transportation System. Institute of Transportation Studies, University of California, Berkeley, 1995.
44. Houghton, N. Ecologically Sustainable Development: Indicators and Decision Process. Report 319, ARRB Transportation Research, Vermont South, Australia, March 1998.
45. Hohmeyer, O. Social Costs of Climate Change Strong Sustainability and Social Costs. Proceedings of a Conference Held in Ladenburg, Springer, Berlin, Germany, May 1995.
46. Pocket Guide to Transportation. Bureau of Transportation Statistics, U.S. Department of Transportation, Washington D.C., December 1998.
47. Schiller, P., and B. de Lille. Green Streets: The 1991 Intermodal Surface Transportation Efficiency Act and the Greening of Transportation Policy in the United States. Surface Transportation Policy Project, Washington D.C., 1997.
48. McDowell, B. D. Reinventing Planning Under ISTEA: MPOís and State DOTís. Transportation Research Board, National Research Council, Washington D.C., November 1994.
49. Air Quality Demands on Transportation Planning in Texas. A White Paper Prepared by the Technical Working Group for Mobile Source Emissions, Austin, Texas, August 1998.
50. Bass, P., D. Perkinson, B. Keitgen, and G. Dresser. The Context of Analysis (ISTEA and the Clean Air Act). Report 1235-14, Texas Transportation Institute, College Station, Texas, 1994.
51. Anderson, J. E. Public Policymaking: An Introduction: Second Edition. Houghton Mifflin Company, Boston, 1994.
52. Mason, D. Subsidiarity Wins Over Sustainability Every Time. Surveyor, Vol. 181, No. 5280, Hemming Group Ltd, London, England, February 1994, p. 12.
53. Richardson, E., D. Rice, and C. Jelly. Urban Transport for a Vital and Sustainable Future. Road and Transport Research, Vol. 2, No. 2, Victoria, Australia, June 1993, pp. 58-68.
54. Deakin, E. Policy Responses in the USA. Transport, the Environment, and Sustainable Development. Contained in Transport, the Environment, and
145
Sustainable Development. Edited by Banister, D., and K. Button, E & FN Spon, London, England, 1993.
55. Ewing, R., Measuring Transportation Performance. Transportation Quarterly. Vol. 49, No. 1, Washington D.C., Winter 1995, pp. 91-104.
56. Better Understanding our Cities: The Role of Urban Indicators. Organization for Economic Co-operation and Development, Paris, France, 1997.
57. Poister, T. H. Performance Measures in State Departments of Transportation. National Cooperative Highway Research Program, Synthesis of Highway Practice, No. 238, Transportation Research Board, National Research Council, Washington D. C., 1997.
58. Hart, M. Hart Environmental Data: Indicators of Sustainability. http://www.subjectmatters.com/indicators/index.html. Accessed December 1998.
59. Indicators of the Environmental Impacts of Transportation: Highway, Rail, Aviation, and Maritime Transport. Report 230-R-96-009, Environmental Protection Agency, Washington D.C., October 1996.
60. Lomax, T. J., S. M. Turner, and G. Shunk. Quantifying Congestion: Final Report and Userís Guide. Report 398, National Cooperative Highway Research Program, Washington D.C., 1997.
61. Black, W. R. Toward a Measure of Transport Sustainability. Proceedings of the 79th Annual Meeting of the Transportation Research Board, National Research Council, Washington D.C., January 2000.
62. Stuart, D. G. Goal-Setting and Performance Measurement in Transportation Planning and Programming. Journal of Transportation, Vol. 1, No. 2, Tampa, Florida, Winter 1997, pp. 49-72.
63. Rennings, K. Economic and Ecological Concepts of Sustainable Development: External Costs and Sustainability Indicators. Proceedings of a Conference Held in Ladenburg, Springer, Berlin, Germany, May 1995.
64. National Transportation System Performance Measures. Report prepared for the Office of the Secretary of the U.S. Department of Transportation, Washington D.C., April 1996.
65. Lomax, T. J., and D. L. Schrank. The Keys to Estimating Mobility in Urban Areas, Applying Definitions and Measures that Everyone Understands. Texas Transportation Institute, The Texas A&M University System, College Station, Texas, January 1999.
66. Abrams, C. M., and J. F. DiRenzo. Measures of Effectiveness for Multimodal Urban Traffic Management, Volume 2: Development and Evaluation of TSM Strategies. Report FHEA-RD-79-113 Federal Highway Administration, U.S. Department of Transportation, Washington D.C., 1979.
67. Turner, S. M., M. E. Best, and D. L. Schrank, Measures of Effectiveness for
146
Major Investment Studies. Report SWUTC/96/467106-1, Southwest Region University Transportation Center, Texas A&M University System, College Station, Texas, 1996.
68. Guyton, J. W. Presentation of Comparative Data for Transportation Planning Studies. In Transportation Research Record 1617, Transportation Research Board, National Research Council, Washington D.C., 1998, pp. 44-49.
69. McLeod, D. S. Special Features of Floridaís Mobility Management Process. In Transportation Research Record 1552, Transportation Research Board, National Research Council, Washington D.C., 1996, pp. 42-47.
70. Florida Recommended Mobility Performance Measures. Memorandum prepared by the Florida Department of Transportation, Tallahassee, Florida, July 1998.
71. Landau, U. Aggregate Prediction with Disaggregate Models: Behavior of the Aggregation Bias. In Transportation Research Record 673, Transportation Research Board, National Research Council, Washington D. C., 1974, pp. 100-105.
72. McFadden, D., and F. Reid. Aggregate Travel Demand Forecasting from Disaggregate Behavioral Models. In Transportation Research Record 534, Transportation Research Board, National Research Council, Washington D. C., 1975, pp. 24-37.
73. Koppelman, F. S. Prediction with Disaggregate Models: The Aggregation Issue. In Transportation Research Record 527, Transportation Research Board, National Research Council, Washington D. C., 1974, pp. 73-80.
74. Tye, W. B., L. Sherman, M. Kinnucan, D. Nelson, and T. Tardiff. Applications of Disaggregate Travel Demand Models. Report 253, National Cooperative Highway Research Program, Transportation Research Board, National Research Council, Washington D. C., 1982.
75. Benjamin J. R., and C. A. Cornell. Probability, Statistics, and Decision for Civil Engineers. McGraw-Hill, New York, 1970.
76. Reid, F. A. Minimizing Error in Aggregate Predictions from Disaggregate Models. In Transportation Research Record 673, Transportation Research Board, National Research Council, Washington D.C., 1974, pp. 59-64.
77. Eisele, W. L., S. M. Turner, and R. J. Benz. Using Acceleration Characteristics in Air Quality and Energy Consumption Analysis. Report SWUTC/96/465100-1, Southwest Region University Transportation Center, Texas A&M University System, College Station, Texas, August 1996.
78. Quiroga, C. A., and D. Bullock. Travel Time Studies With Global Positioning and Geographic Information Systems: An Integrated Methodology. Transportation Research Part C, Vol. 6, Elsevier Science Ltd, Exeter, England, 1998, pp. 101-127.
79. Bush, B. W. The TRANSIMS Framework. Report LA-UR-99-7, Los Alamos

147
National Laboratory, Los Alamos, New Mexico, 1999.
80. Rilett, L. R. Transportation Planning and the TRANSIMS Micro-simulation Model: Prepared for the Transition, Preprint, 80th Annual Meeting of the Transportation Research Board, Washington D. C., 2000.
81. Nagel, K., P. Stretz, M. Pieck, S. Lecky, R. Donnelly, and C. L. Barrett. TRANSIMS Traffic Flow Characteristics. Report LA-UR-97-3530, Los Alamos Nation Laboratory, Los Alamos, New Mexico, July 1997.
82. United States Environmental Protection Agency (EPA). http://www.epa.gov/. Accessed January 1999.
83. Crawford, J. A., C. Jordan, and G. B. Dresser. Modal Emissions Modeling with Real Traffic Data. Report 1358-3F, Texas Transportation Institute, The Texas A&M University System, College Station, Texas, January 1999.
84. Jordan, D. C. Measures of Responsibility for Pollution and their Application in Road Pricing. Master of Science Thesis, University of Alberta, Canada, 1996.
85. New Highway Traffic Noise Prediction Model Almost Complete, Federal Highway Administration, U.S. Department of Transportation. http://www.tfrc.gov/trnsptr/rttmar96/rd960065.htm. Accessed January 1999.
86. McTrans: Center for Microcomputers in Transportation. http://www.mctrans.ce.ufl.edu/. Accessed April 2000.
87. Highway Capacity Manual. Special Report 290, Transportation Research Board, National Research Council, Washington D.C., 1997.
88. Dixon, M. P. Incorporation of Automatic Vehicle Identification Data Into the Synthetic OD Estimation Process. Ph.D. Dissertation, Texas A&M University, College Station, Texas, May 2000.
89. Fu, L., and L. R. Rilett. Expected Shortest Paths in Dynamic and Stochastic Traffic Networks. Transportation Research Part B, Vol. 32, No. 7, 1998, Elsevier Science Ltd., Exeter, England, 1998, pp. 449-516.
90. Rilett, L. R., K. Kim, and B. Raney. A Comparison of the Low Fidelity TRANSIMS and High Fidelity CORSIM Highway Simulation Models Using ITS Data. Preprint 00-0678, Transportation Research Board 79th Annual Meeting, Washington D. C., January, 2000.
91. Cleveland, W.D., and S.J. Devlin. Locally Weighted Regression: An Approach to Regression Analysis by Local Fitting. Journal of the American Statistical Association, Vol. 83, No. 403, New York, September 1988.
92. Perkinson, D. G., C. Bell, and G. B. Dresser. Development of Gridded Mobile Source Emissions Estimates for the Houston-Galveston Nonattainment Counties FY 2007 in Support of the COAST Project. Report 402001, Texas Transportation Institute, The Texas A&M University System, College Station, Texas, December 1998.

148
93. Jordan, D. C. Measures of Responsibility for Pollution and their Application in Road Pricing. Master of Science Thesis, University of Alberta, Canada, 1996.
94. Jordan, D. C., J. Zietsman, and L. R. Rilett. Development of Sustainable Transportation Metrics for Vehicular Pollutants. Transportation Planning and Technology, Volume 24, No. 3. Leicestershire, England, 2001, pp 86-94.
95. Turner, S.M., B. J. Gajewski, and G. B. Dresser. Sensitivity of Analysis Time Intervals for Mobile Source Emissions Estimation: Using Archived ITS Data to Determine Effects on VKT-Speed Distributions and Emissions Estimates. Preprint, Transportation Research Board 80th Annual Meeting, Washington D. C., January, 2001.
96. Zietsman, J., and L. R. Rilett. Using TRANSIMS and ITS Data to Quantify Aspects of Sustainable Transportation. Proceedings of the 9th World Conference on Transportation Research, Seoul, Korea, July 2001.
97. Guidelines for Analysis and Abatement of Highway Traffic Noise. Texas Department of Transportation, Environmental Affairs Division, Austin, Texas, June 1996.
98. Rao, K. S., and R. A. Krammes. Energy-Based Fuel Consumption Model for FREFLO. In Transportation Research Record 1444, Transportation Research Board, National Research Council, Washington D. C., 1994, pp. 36-43.
99. Olson, D. L. Decision Aids for Selection Problems. Springer, New York, 1996.
100. Rilett, L. R. Allocating Pollution Costs Using Noise Equivalency Factors. In Transportation Research Record 1498, Transportation Research Board, National Research Council, Washington D. C., 1996, pp. 102-107.
101. Rilett, L. R., B. G. Hutchinson, and R .C. G. Haas. Cost Allocation Implications of Flexible Pavement Deterioration Models. In Transportation Research Record 1215, Transportation Research Board, National Research Council, Washington D.C., 1988, pp. 31-42.
102. AASHTO Road Test: Report 5- Pavement Research. Special Report 615. American Association of State Highway Transportation Officials (AASHTO), Highway Research Board, Washington D.C., 1962.
103. Irwin, N. Transportation Pricing Strategies to Recover Environmental Costs. Annual Conference on Building Environmental Externalities into Full-cost Accounting, Transportation Association of Canada, Prince Edward Island, Canada, October 1996.
104. Litman, T. Transportation Cost Analysis for Sustainability. Victoria Transport Policy Institute, Victoria, Canada, July 1996.
105. Whitelegg, J. Transportation for a Sustainable Future: The Case for Europe. Belhave Press, London, England, 1993.
106. Zegras, C., and T. A. Litman. Cost Estimates of Transportation Air Pollution in
149
Santiago, Chile. In Transportation Research Record 1587, Transportation Research Board, National Research Council, Washington D.C., 1997, pp. 106-112.
107. Tellis, R. and C. J. Khisty. Congestion Pricing: The Actual Cost to Drive an Automobile on Urban Highways. Proceedings of the 1995 ASCE Conference, American Society of Civil Engineers, Reston, Virginia, 1995, pp. 946-957.
108. Irwin, N. Transportation Pricing Strategies to Recover Environmental Costs. Annual Conference on Building Environmental Externalities into Full-cost Accounting, Transportation Association of Canada, Prince Edward Island, Canada, October 1996.
109. Delucchi, M. A. Total Cost of Motor-Vehicle Use. Access No. 8, University of California Transportation Center, Berkeley, California, Spring 1996.









![Parallel implementation of the TRANSIMS micro … · arXiv:cs/0105004v1 [cs.CE] 2 May 2001 Parallel implementation of the TRANSIMS micro-simulation Kai Nagela ,1 and Marcus Rickertb](https://img.pdfslide.us/doc/110x75/5b5de4f37f8b9a65028e94ab/parallel-implementation-of-the-transims-micro-arxivcs0105004v1-csce-2-may.jpg)


















