Embed Size (px)
Citation preview
Tel. 22606910
Ext. 8851
Tec. JosTec. Joséé Ricardo SRicardo Sáánchez Barrientosnchez BarrientosCentro Nacional de Registros (C.N.R.)
Instituto Geográfico y del Catastro Nacional, I.G.C.N.
Coordinación de Proyecto Especiales de Mantenimiento Catastral
““CAPACITACION CAPACITACION
PARA EVALUACIPARA EVALUACIÓÓN DE N DE EDIFICACIONES EDIFICACIONES
POST SISMOPOST SISMO””
Jueves 24, Viernes 25 y sJueves 24, Viernes 25 y sáábado 26 de abril de 2008bado 26 de abril de 2008
San Salvador. El SalvadorSan Salvador. El Salvador
GEOREFERENCIACIGEOREFERENCIACIÓÓN N
DE LA DE LA
INFORMACIINFORMACIÓÓNN
25 DE ABRIL DE 2008
OBJETIVOOBJETIVO
FACILITAR LA TEORÍA BÁSICA, COMPOSICIÓN Y APLICACIÓN DEL SISTEMA DE POSICIONAMIENTO GLOBAL (G.PS.), CON EL OBJETO DE ESTABLECER LA GEOREFERENCIA DE EDIFICACIONES POST – SISMOS.

SISTEMA GLOBALSISTEMA GLOBAL
DE NAVEGACIDE NAVEGACIÓÓNN
POR SATPOR SATÉÉLITE (GNSS)LITE (GNSS)
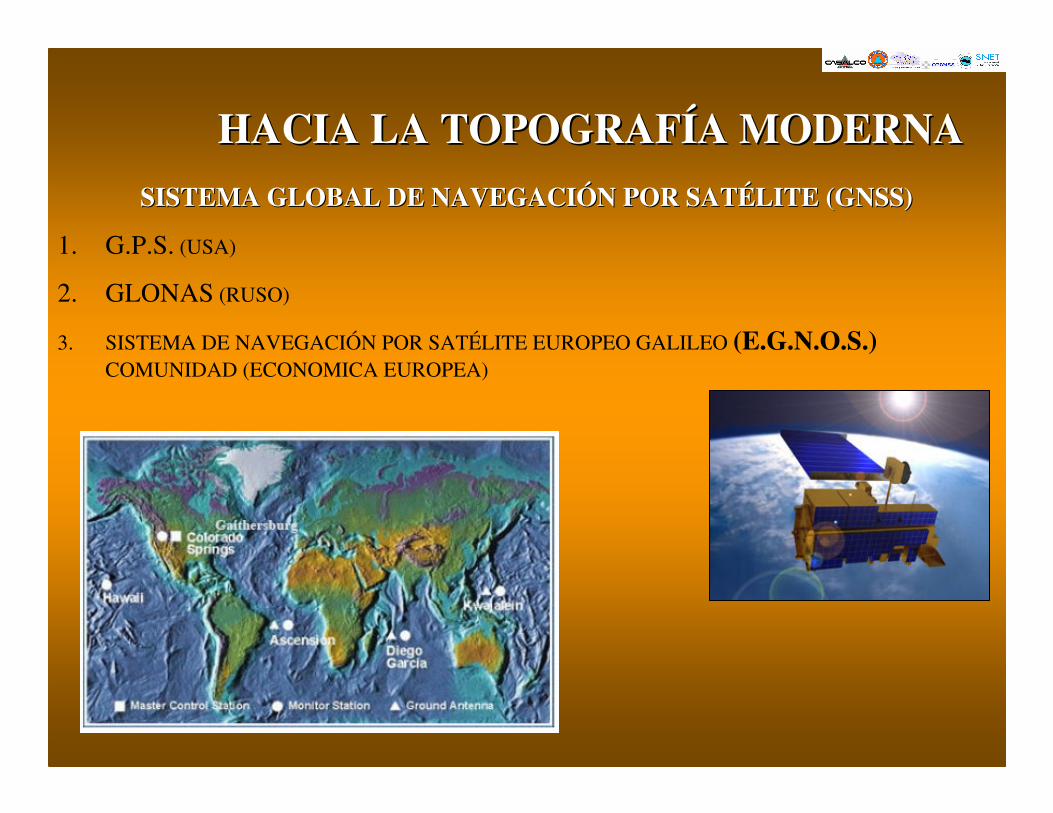
SISTEMA GLOBAL DE NAVEGACISISTEMA GLOBAL DE NAVEGACIÓÓN POR SATN POR SATÉÉLITE (GNSS)LITE (GNSS)
1. G.P.S. (USA)
2. GLONAS (RUSO)
3. SISTEMA DE NAVEGACIÓN POR SATÉLITE EUROPEO GALILEO (E.G.N.O.S.)COMUNIDAD (ECONOMICA EUROPEA)
HACIA LA TOPOGRAFHACIA LA TOPOGRAFÍÍA MODERNAA MODERNA
Inicialmente Galileo iba a estar disponible en el 2008 aunque el proyecto acumula ya tres añosde retraso y no podrá comercializar sus primeros servicios hasta 2011, entre temores de que esa fecha pueda demorarse hasta 2014, entre otros motivos, por disensiones entre los países participantes.
El 28 de diciembre de 2005 se lanzó el satélite GIOVE-A (Galileo in-orbit validation element),primero de este sistema de localización por satélite, desde el cosmódromo de Baikonur, en Kazajistán. El segundo de los satélites de prueba, el GIOVE-B debería haberse lanzado enabril de 2006, pero su lanzamiento fue retrasado hasta mediados o finales de 2007 por fallosen su computador de a bordo.
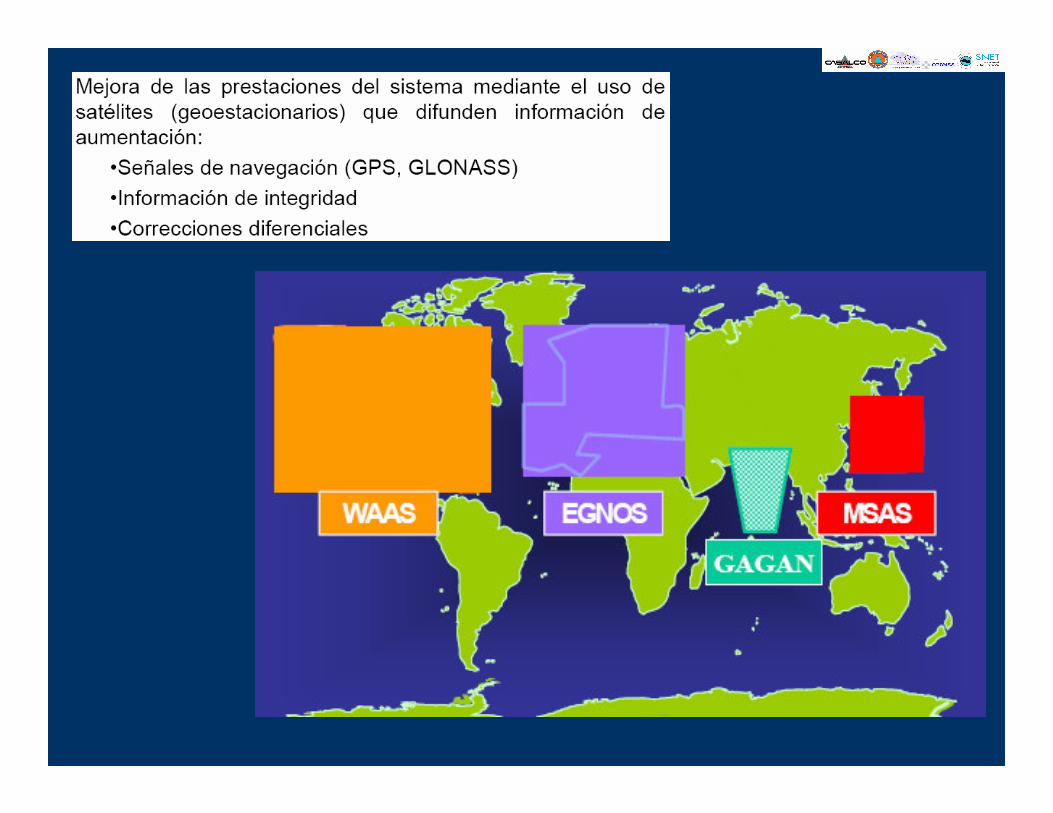
En abril de 2004 ha entrado en funcionamiento el sistema EGNOS, un sistema de apoyo al GPSpara mejorar la precisión de las localizaciones. En otras regiones del mundo hay otros sistemas similares compatibles con EGNOS:
WAAS de Estados UnidosMSAS de JapónGAGAN de la India
Las fases establecidas para la implementación del sistemas son:Definición (2000-2003)
Desarrollo y validación en órbita (2004-2008) Despliegue (2008-2010)
Explotación comercial (a partir de 2010 - 2015)
SISTEMA DE NAVEGACISISTEMA DE NAVEGACIÓÓN POR SATN POR SATÉÉLITELITE EUROPEO GALILEOEUROPEO GALILEO
(EGNOS)(EGNOS)
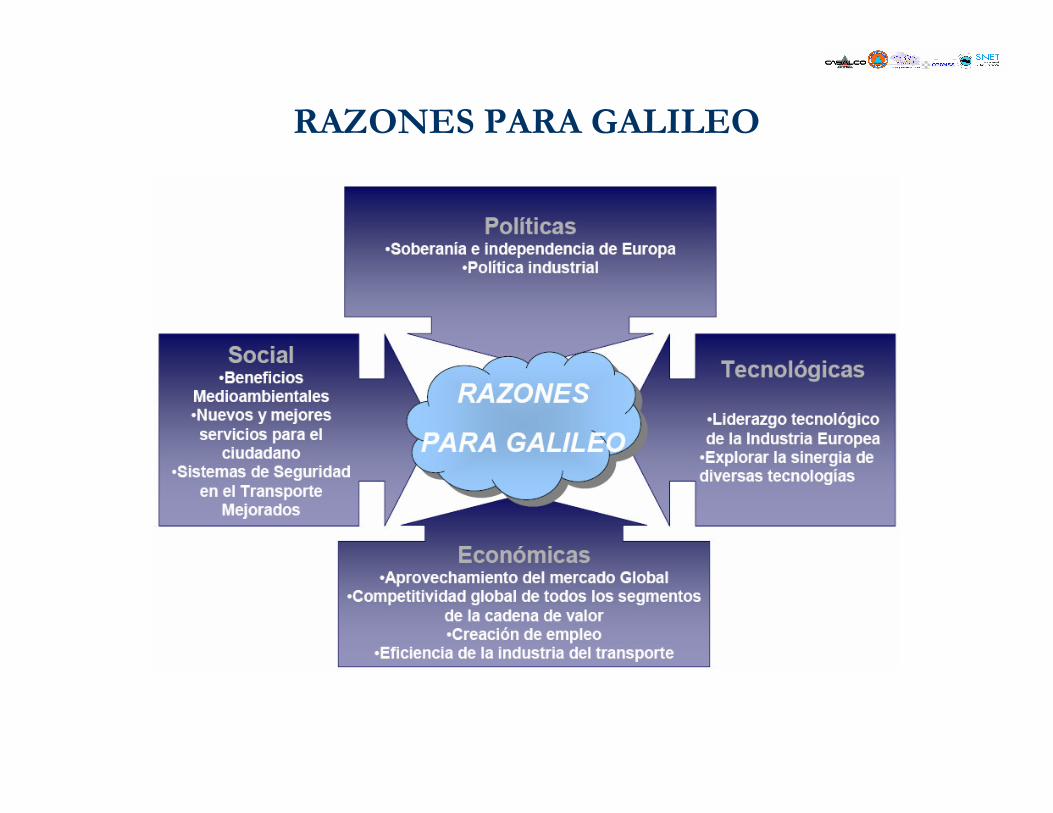
RAZONES PARA GALILEO
TEORIA BASICATEORIA BASICA
Sistema de Posicionamiento GlobalSistema de Posicionamiento Global
G.P.S.G.P.S.
ANTECEDENTES
LA ARMADA ESTADOUNIDENSE PATROCINÓ LOS PRIMEROS SISTEMAS DE POSICIONAMIENTO Y NAVEGACIÓN CON BASE EN SATÉLITES A COMIENZO DE LOS AÑOS SESENTA, PERO SOLO EN LA DÉCADA DE LOS AÑOS SETENTA, SE PUSO EN FUNCIONAMIENTO LA FASE I DEL SISTEMA DE POSICIONAMIENTO GLOBAL NAVSTAR O G.P.S.
GG..PP..SS..SISTEMA DE POSICIONAMIENTO GLOBALSISTEMA DE POSICIONAMIENTO GLOBAL
UNA ARMA DE GUERRA O UN EQUIPO DE TRABAJO ???
SSSS

G.P.S. ES UN SISTEMA DE NAVEGACIÓN, POSICIONAMIENTO Y FUENTE DE HORA UNIVERSALCOORDINADA, BASADO SOBRE EMISIONES DE RADIO SEÑALES DE SATÉLITES, DISPONIBLE EN CUALQUIER CONDICIÓN METEOROLÓGICA.
CONCEPTO BCONCEPTO BÁÁSICOSICO DEL SISTEMADEL SISTEMA
ESTRUCTURADEL
SISTEMAG.P.S.
SEGMENTO ESPACIAL
SEGMENTO DE CONTROL
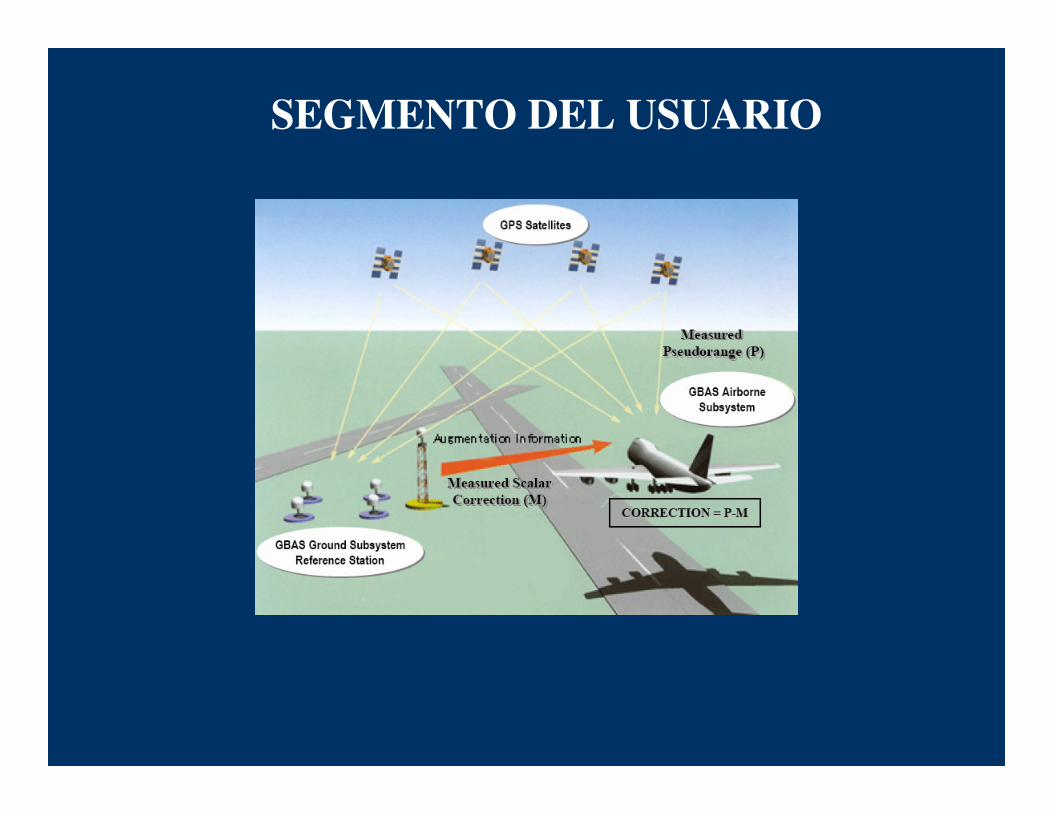
SEGMENTO DEL USUARIO

SEGMENTO ESPACIAL
La constelación final, operativa desde Enero de 1994, consta de 6 orbitas con 4 satélites
cada una. Estas órbitas tiene una inclinación de 55° con respecto al ecuador y separados
60° entre sí.
Los satélites están aproximadamente a
20,200 Km. de altura, estos completan una vuelta alrededor de la tierra cada 12 horas. Período de 12 horas siderales (11 horas y 58 minutos) cada órbita completa dos vueltas cada 24 horas siderales, o sea, 23 horas 56 minutos.
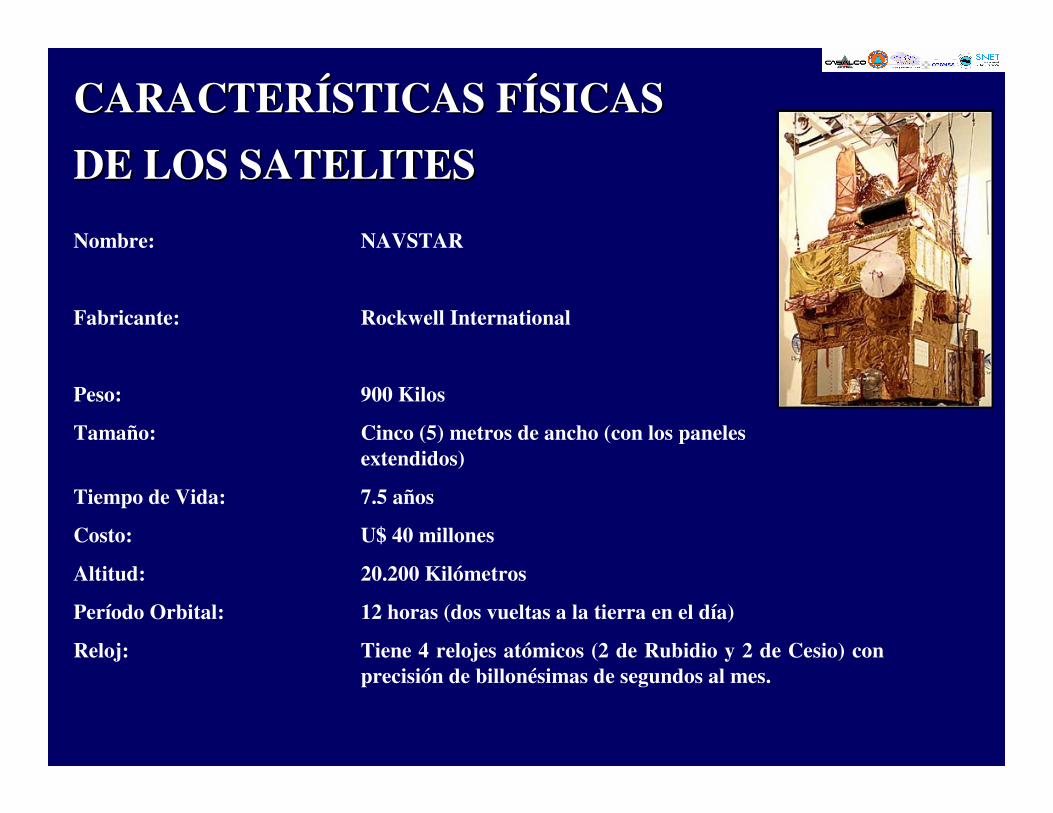
CARACTERCARACTERÍÍSTICAS FSTICAS FÍÍSICASSICAS
DE LOS SATELITESDE LOS SATELITES
Nombre: NAVSTAR
Fabricante: Rockwell International
Peso: 900 Kilos
Tamaño: Cinco (5) metros de ancho (con los paneles extendidos)
Tiempo de Vida: 7.5 años
Costo: U$ 40 millones
Altitud: 20.200 Kilómetros
Período Orbital: 12 horas (dos vueltas a la tierra en el día)
Reloj: Tiene 4 relojes atómicos (2 de Rubidio y 2 de Cesio) con precisión de billonésimas de segundos al mes.
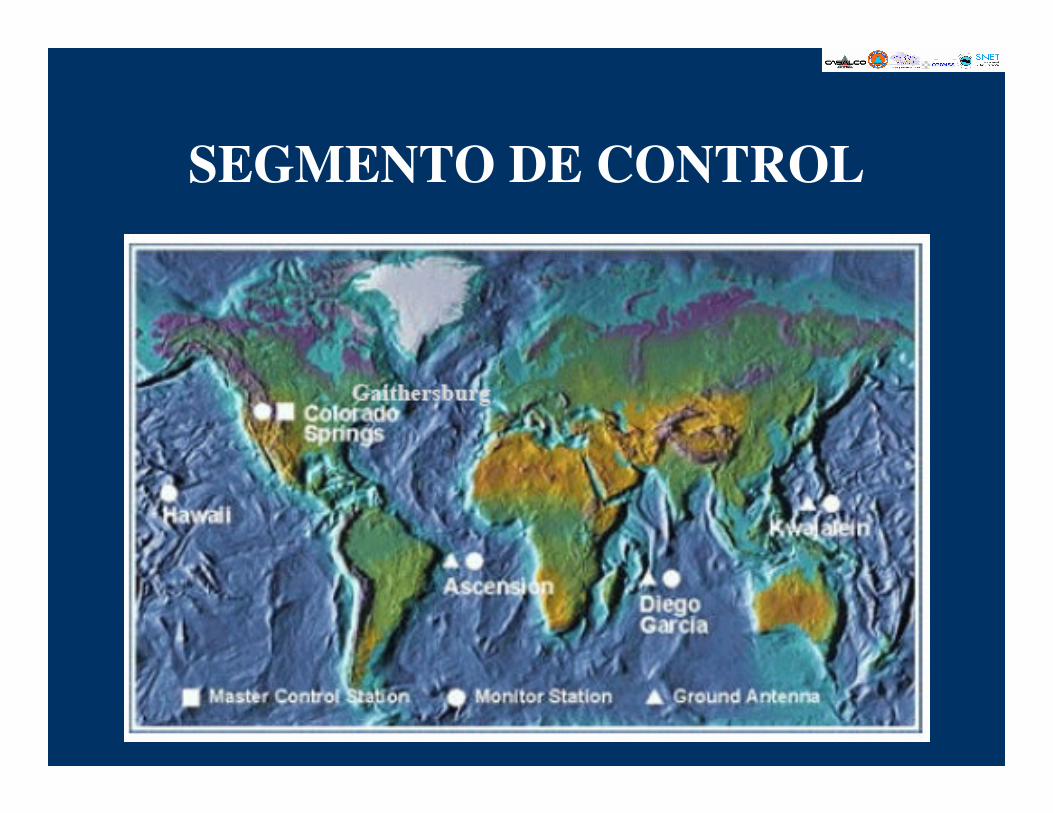
SEGMENTO DE
CONTROL
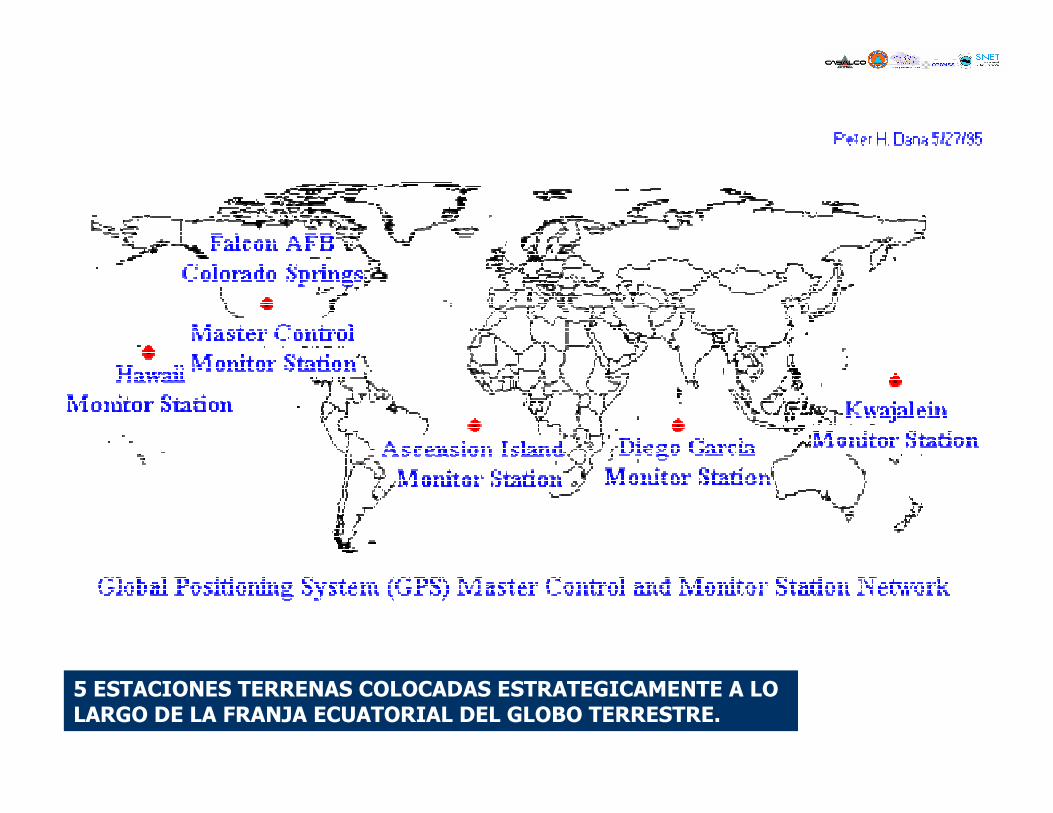
5 ESTACIONES TERRENAS COLOCADAS ESTRATEGICAMENTE A LO LARGO DE LA FRANJA ECUATORIAL DEL GLOBO TERRESTRE.
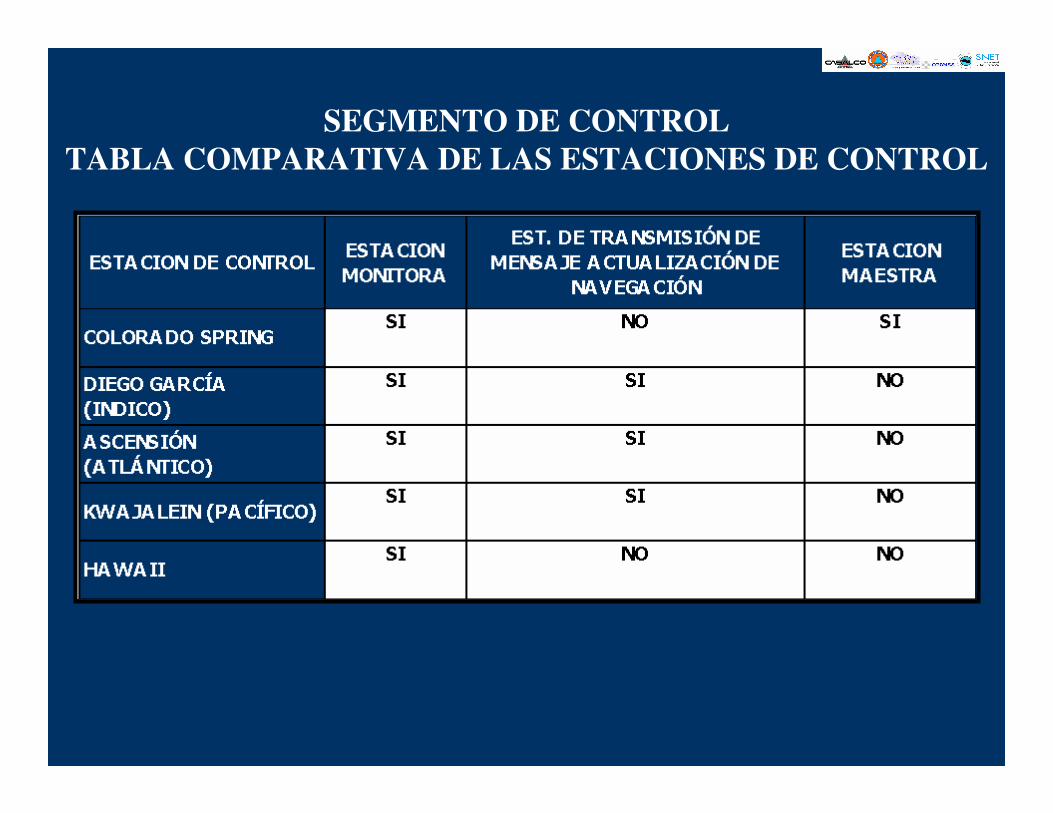
SEGMENTO DE CONTROLTABLA COMPARATIVA DE LAS ESTACIONES DE CONTROL
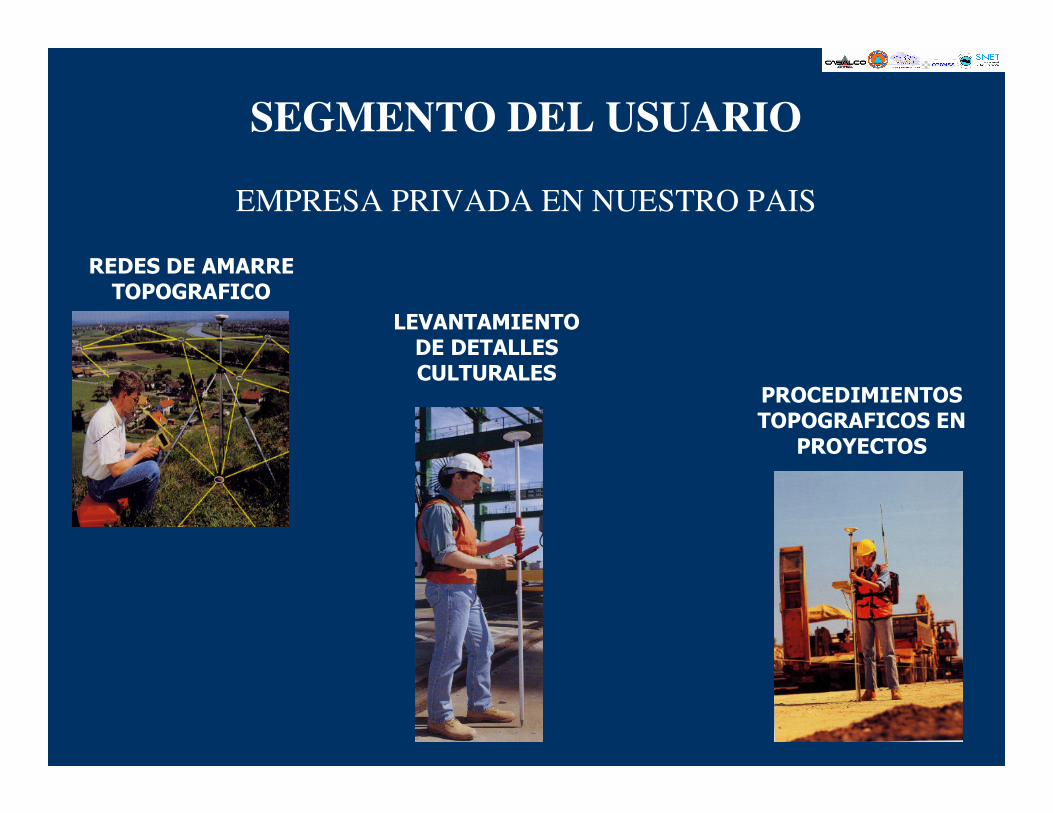
SEGMENTO DEL USUARIO
EMPRESA PRIVADA EN NUESTRO PAIS
REDES DE AMARRE TOPOGRAFICO
LEVANTAMIENTO DE DETALLES CULTURALES
PROCEDIMIENTOS TOPOGRAFICOS EN
PROYECTOS
EMPRESA DE GOBIERNO
CENTRO NACIONAL DE REGISTROS (C.N.R.)
Instituto Geografico y del Catastro Nacional, I.G.C.N.
APLICACIONES:
RED GEODÉSICA NACIONAL, G.P.S. Frecuencia Dual (L1/L2)
ARCO GEODESICO BINACIONAL FRONTERIZO EL SALVADOR - HONDURAS, G.P.S. Frecuencia Dual (L1/L2)
REDES GEODESICA DEPARTAMENTALES, G.P.S. Frecuencia Dual (L1/L2)
UBICACIÓN DE PARCELAS (MANTENIMIENTO CATASTRAL), G.PS. Navegadores
MAPEO DE RUTAS EN ZONAS NO CATASTRADAS, G.PS. Navegadores
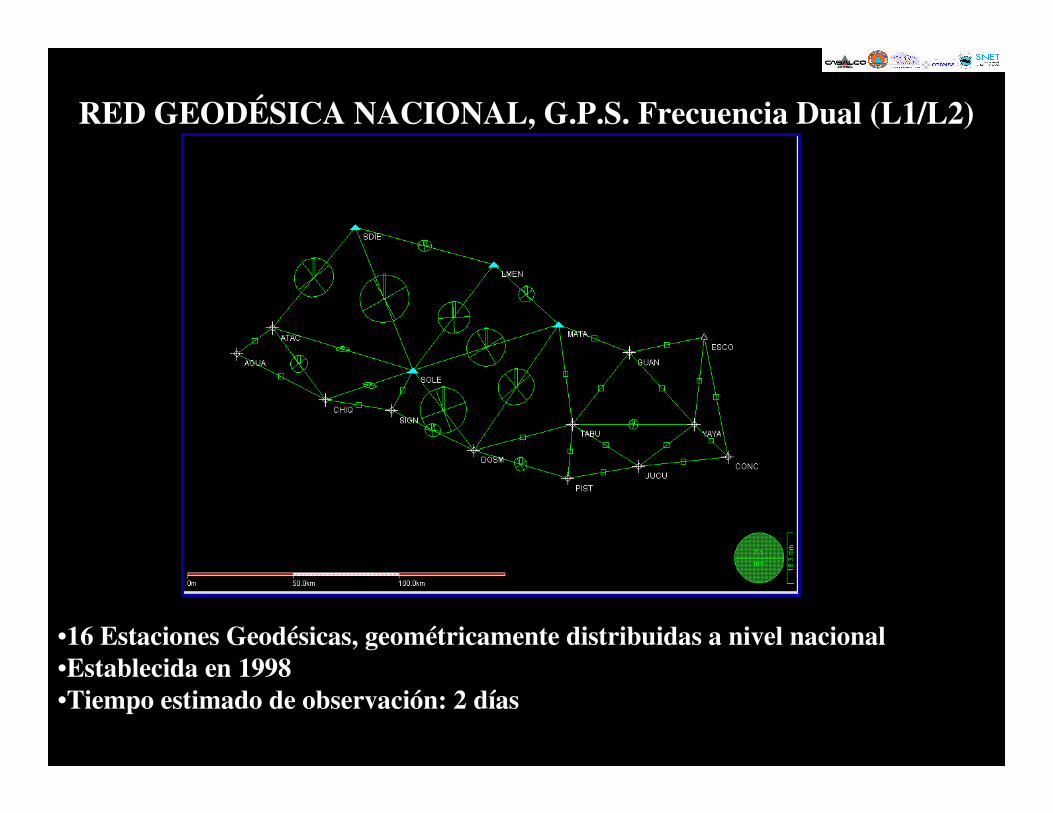
•16 Estaciones Geodésicas, geométricamente distribuidas a nivel nacional•Establecida en 1998•Tiempo estimado de observación: 2 días
RED GEODÉSICA NACIONAL, G.P.S. Frecuencia Dual (L1/L2)

RED GEODÉSICA NACIONAL, G.P.S. Frecuencia Dual (L1/L2)
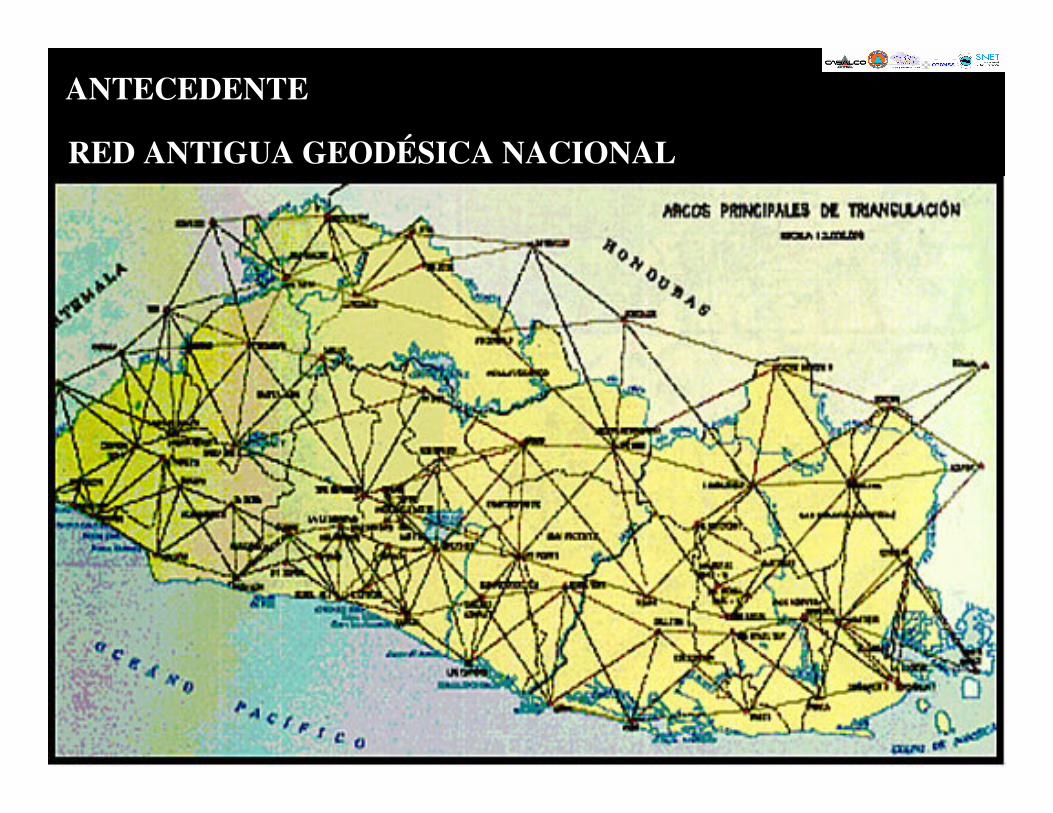
RED ANTIGUA GEODÉSICA NACIONAL
ANTECEDENTE
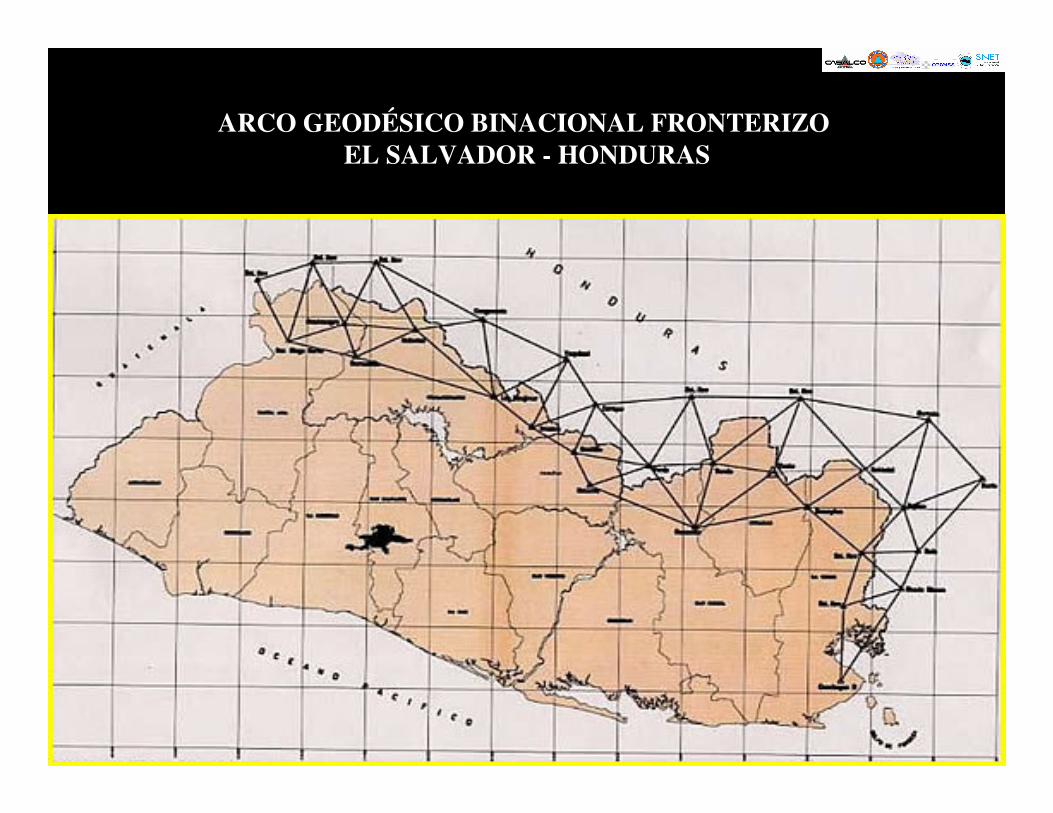
ARCO GEODÉSICO BINACIONAL FRONTERIZO EL SALVADOR - HONDURAS
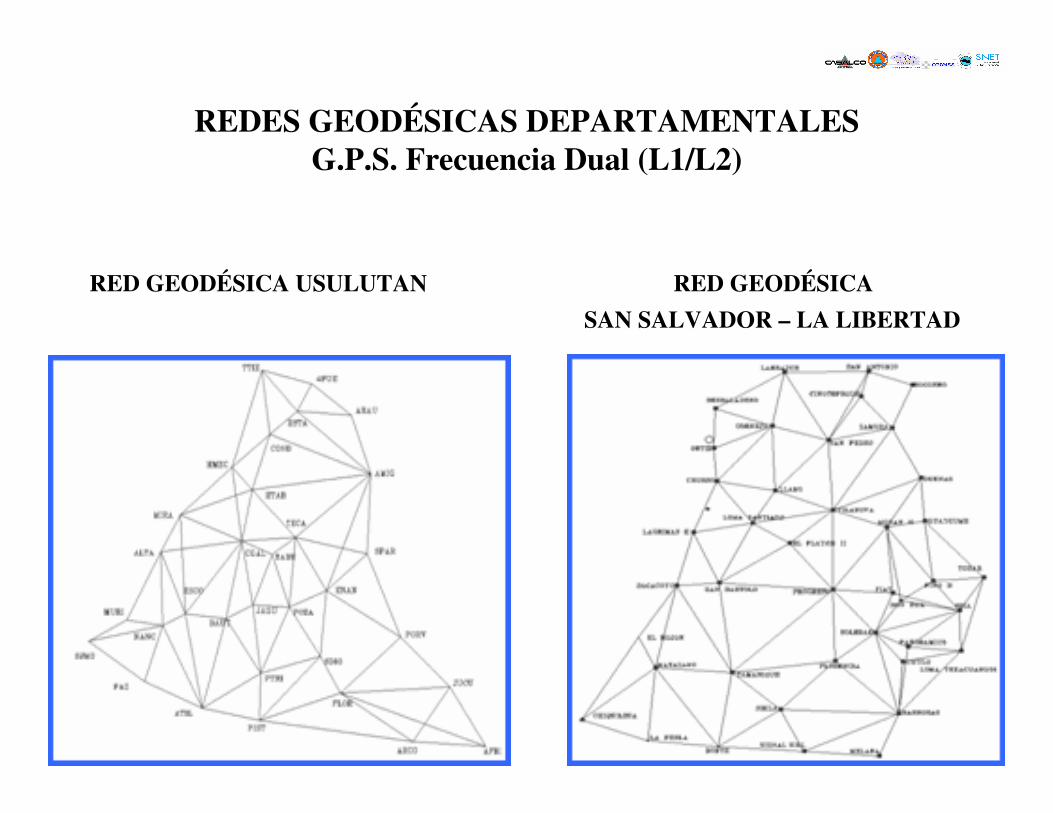
REDES GEODÉSICAS DEPARTAMENTALESG.P.S. Frecuencia Dual (L1/L2)
RED GEODÉSICA USULUTAN RED GEODÉSICA
SAN SALVADOR – LA LIBERTAD
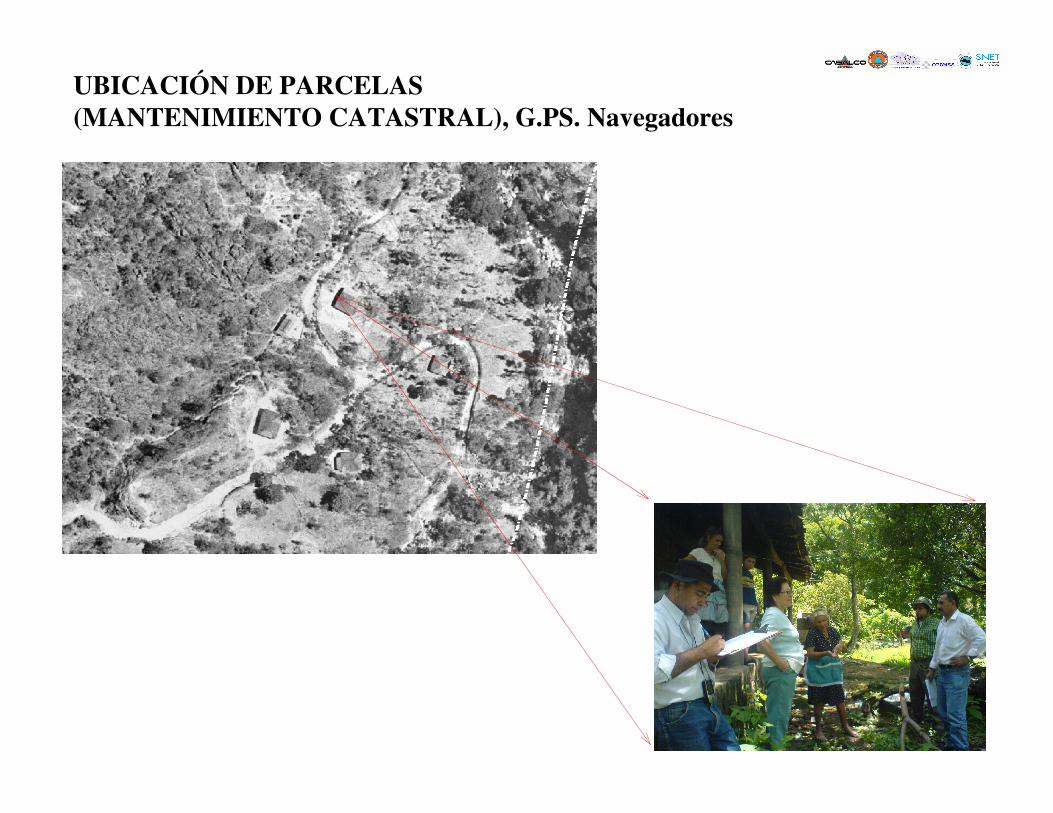
UBICACIÓN DE PARCELAS (MANTENIMIENTO CATASTRAL), G.PS. Navegadores
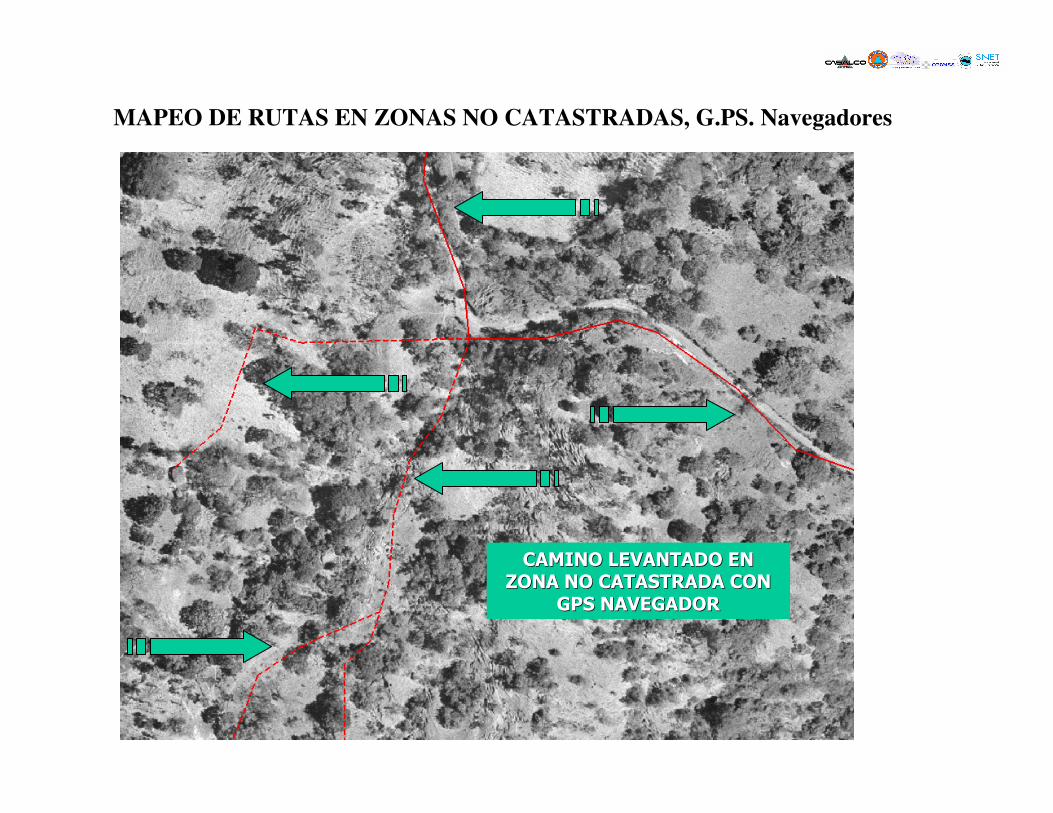
MAPEO DE RUTAS EN ZONAS NO CATASTRADAS, G.PS. Navegadores
CAMINO LEVANTADO EN CAMINO LEVANTADO EN ZONA NO CATASTRADA CON ZONA NO CATASTRADA CON
GPS NAVEGADORGPS NAVEGADOR
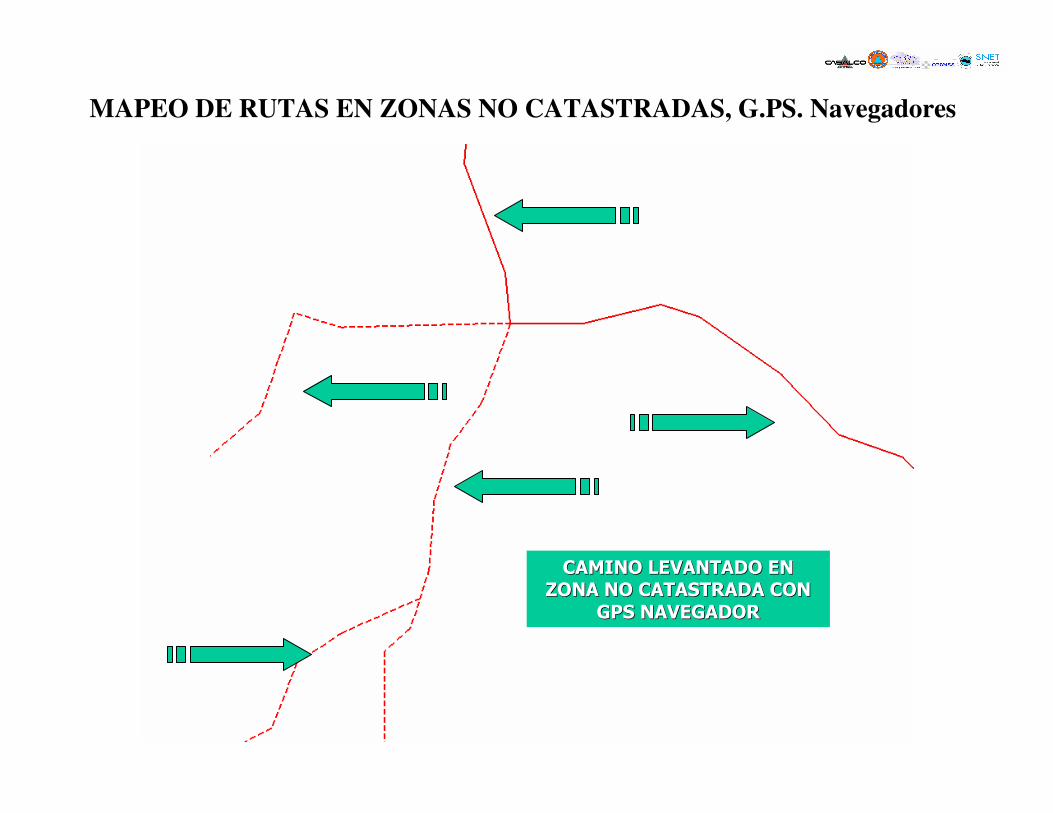
MAPEO DE RUTAS EN ZONAS NO CATASTRADAS, G.PS. Navegadores
CAMINO LEVANTADO EN CAMINO LEVANTADO EN ZONA NO CATASTRADA CON ZONA NO CATASTRADA CON
GPS NAVEGADORGPS NAVEGADOR

Con equipo GPS Con equipo GPS de doble frecuenciade doble frecuenciaL1 /L2L1 /L2 y L1y L1
ESTACION TOTAL Y G.P.S.EL COMPLEMENTO IDEAL
COMO MIDE EL SISTEMA ???
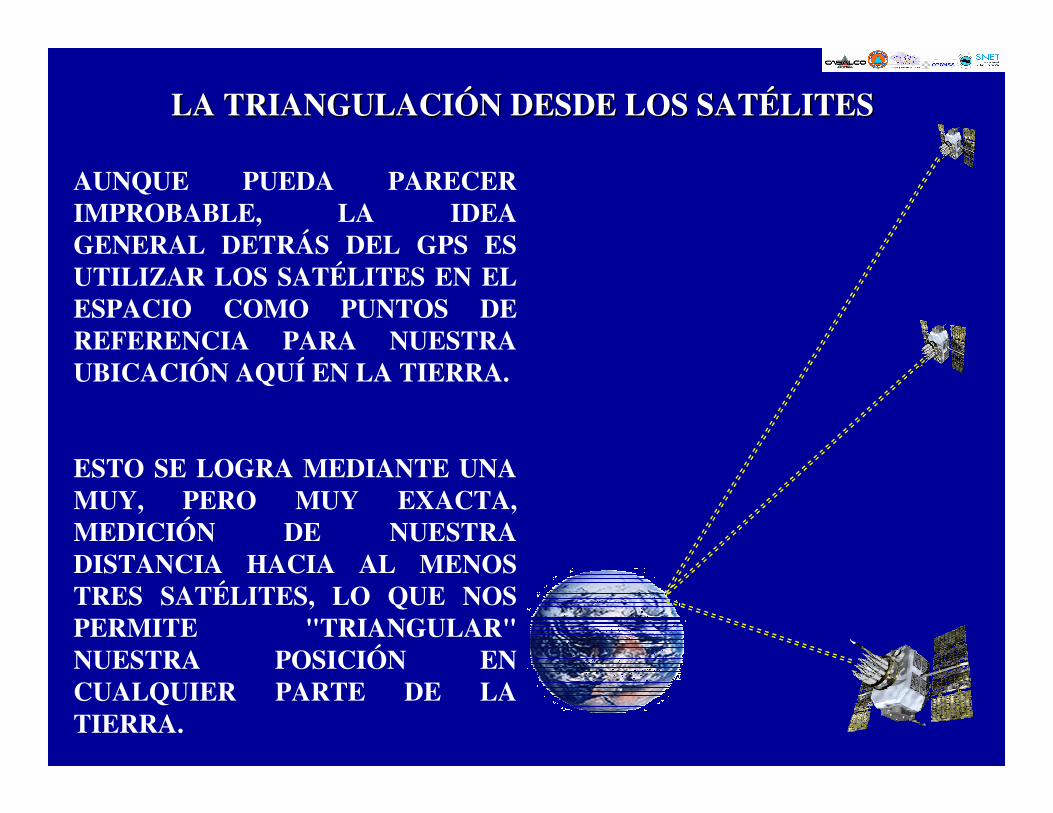
AUNQUE PUEDA PARECER IMPROBABLE, LA IDEA GENERAL DETRÁS DEL GPS ES UTILIZAR LOS SATÉLITES EN EL ESPACIO COMO PUNTOS DE REFERENCIA PARA NUESTRA UBICACIÓN AQUÍ EN LA TIERRA.
ESTO SE LOGRA MEDIANTE UNA MUY, PERO MUY EXACTA, MEDICIÓN DE NUESTRA DISTANCIA HACIA AL MENOS TRES SATÉLITES, LO QUE NOS PERMITE "TRIANGULAR" NUESTRA POSICIÓN EN CUALQUIER PARTE DE LA TIERRA.
LA TRIANGULACILA TRIANGULACIÓÓN DESDE LOS SATN DESDE LOS SATÉÉLITESLITES
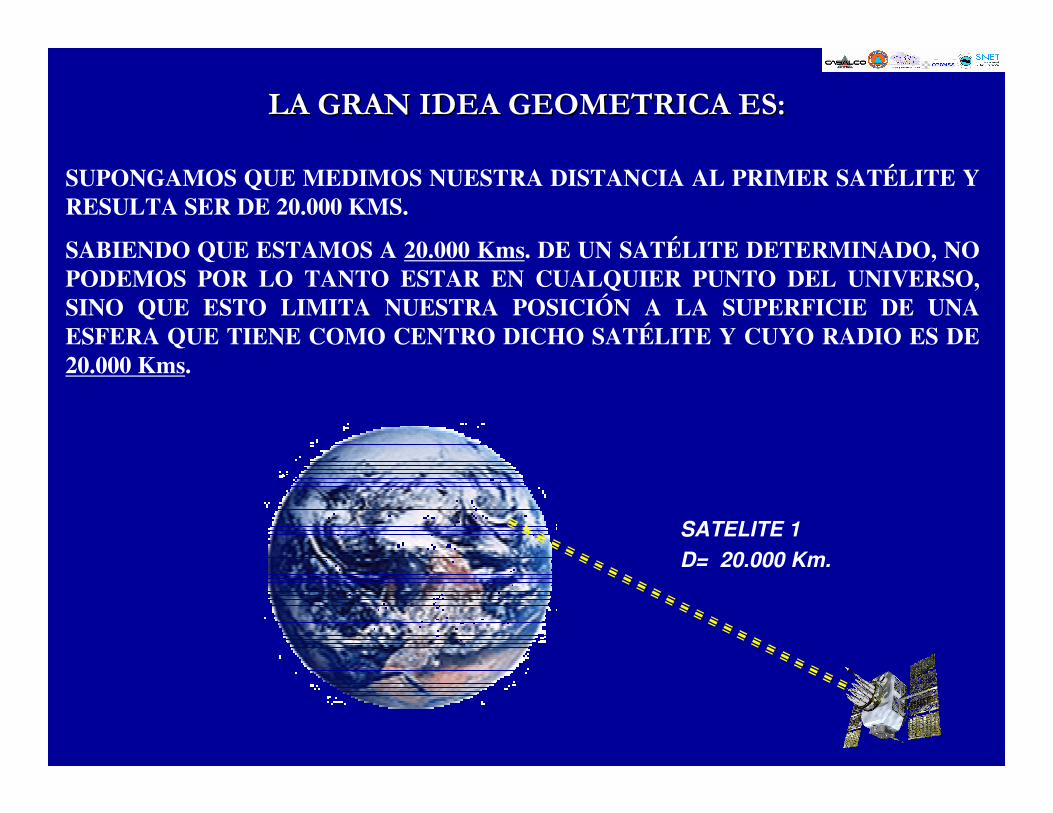
LA GRAN IDEA GEOMETRICA ES:LA GRAN IDEA GEOMETRICA ES:
SUPONGAMOS QUE MEDIMOS NUESTRA DISTANCIA AL PRIMER SATÉLITE Y RESULTA SER DE 20.000 KMS.
SABIENDO QUE ESTAMOS A 20.000 Kms. DE UN SATÉLITE DETERMINADO, NO PODEMOS POR LO TANTO ESTAR EN CUALQUIER PUNTO DEL UNIVERSO,SINO QUE ESTO LIMITA NUESTRA POSICIÓN A LA SUPERFICIE DE UNA ESFERA QUE TIENE COMO CENTRO DICHO SATÉLITE Y CUYO RADIO ES DE 20.000 Kms.
SATELITE 1
D= 20.000 Km.
SATELITE 1
D= 20.000 Kms.
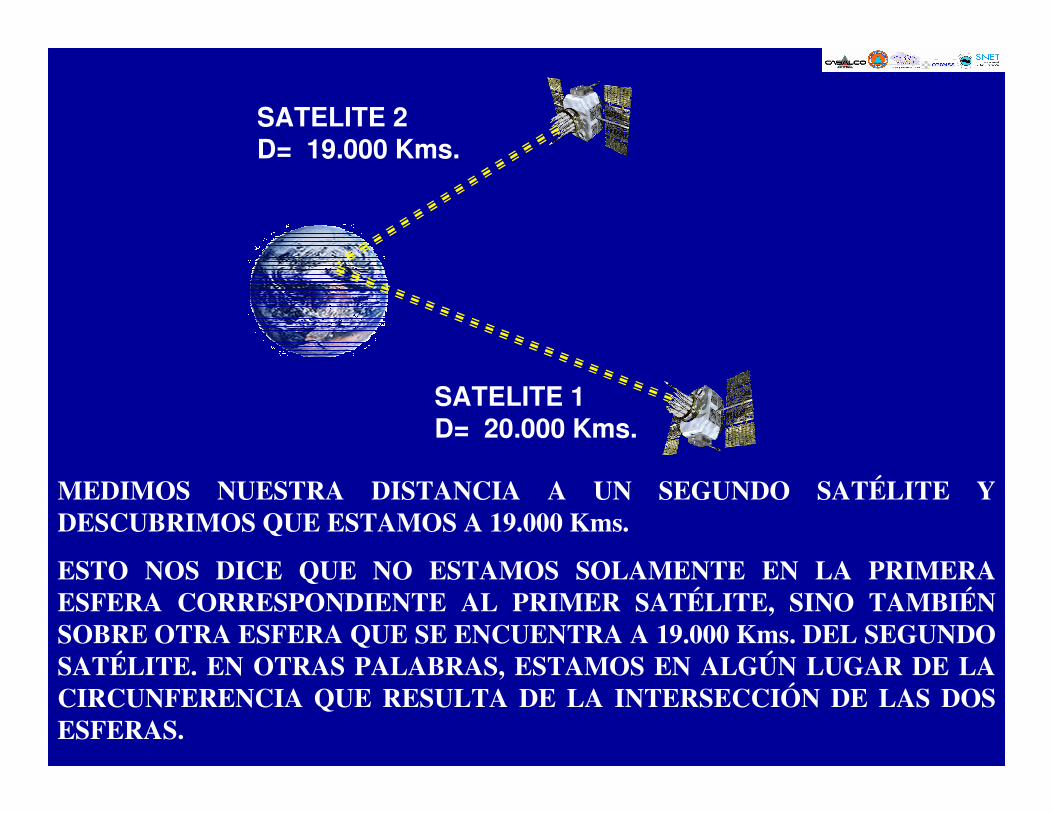
SATELITE 2
D= 19.000 Kms.
MEDIMOS NUESTRA DISTANCIA A UN SEGUNDO SATÉLITE Y DESCUBRIMOS QUE ESTAMOS A 19.000 Kms.
ESTO NOS DICE QUE NO ESTAMOS SOLAMENTE EN LA PRIMERAESFERA CORRESPONDIENTE AL PRIMER SATÉLITE, SINO TAMBIÉN SOBRE OTRA ESFERA QUE SE ENCUENTRA A 19.000 Kms. DEL SEGUNDO SATÉLITE. EN OTRAS PALABRAS, ESTAMOS EN ALGÚN LUGAR DE LA CIRCUNFERENCIA QUE RESULTA DE LA INTERSECCIÓN DE LAS DOS ESFERAS.
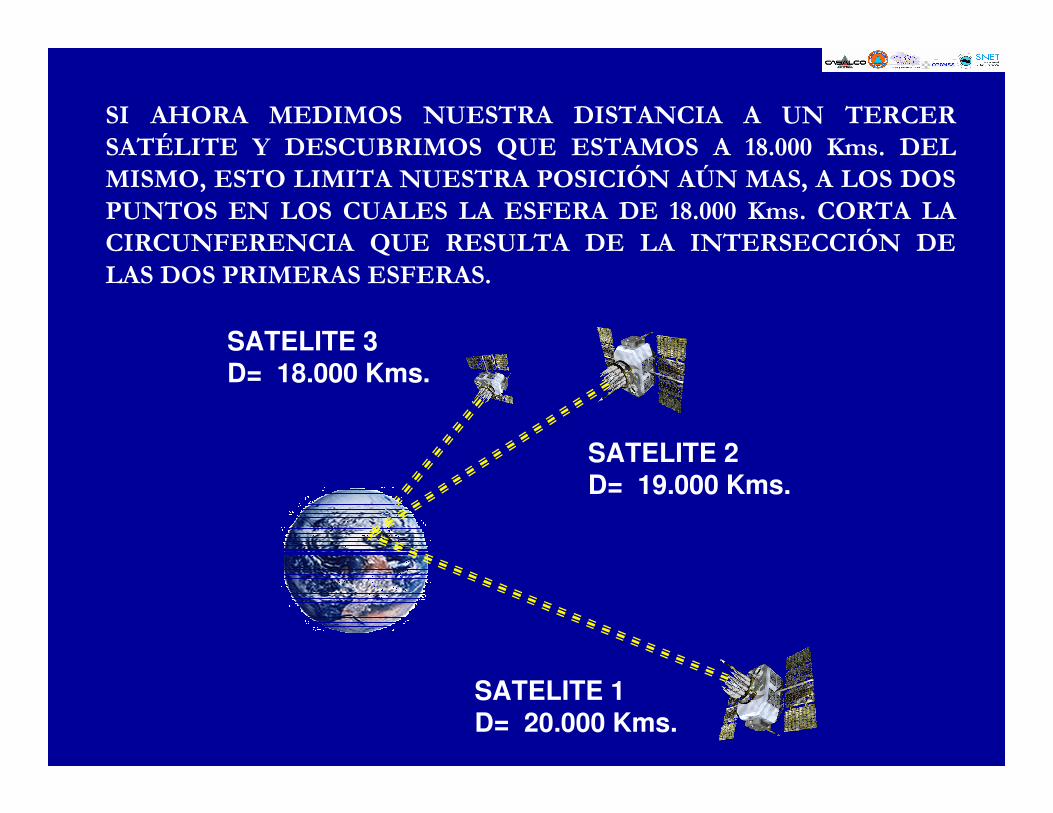
SATELITE 1
D= 20.000 Kms.
SATELITE 2
D= 19.000 Kms.
SATELITE 3
D= 18.000 Kms.
SI AHORA MEDIMOS NUESTRA DISTANCIA A UN TERCER SATÉLITE Y DESCUBRIMOS QUE ESTAMOS A 18.000 Kms. DEL MISMO, ESTO LIMITA NUESTRA POSICIÓN AÚN MAS, A LOS DOS PUNTOS EN LOS CUALES LA ESFERA DE 18.000 Kms. CORTA LA CIRCUNFERENCIA QUE RESULTA DE LA INTERSECCIÓN DE LAS DOS PRIMERAS ESFERAS.
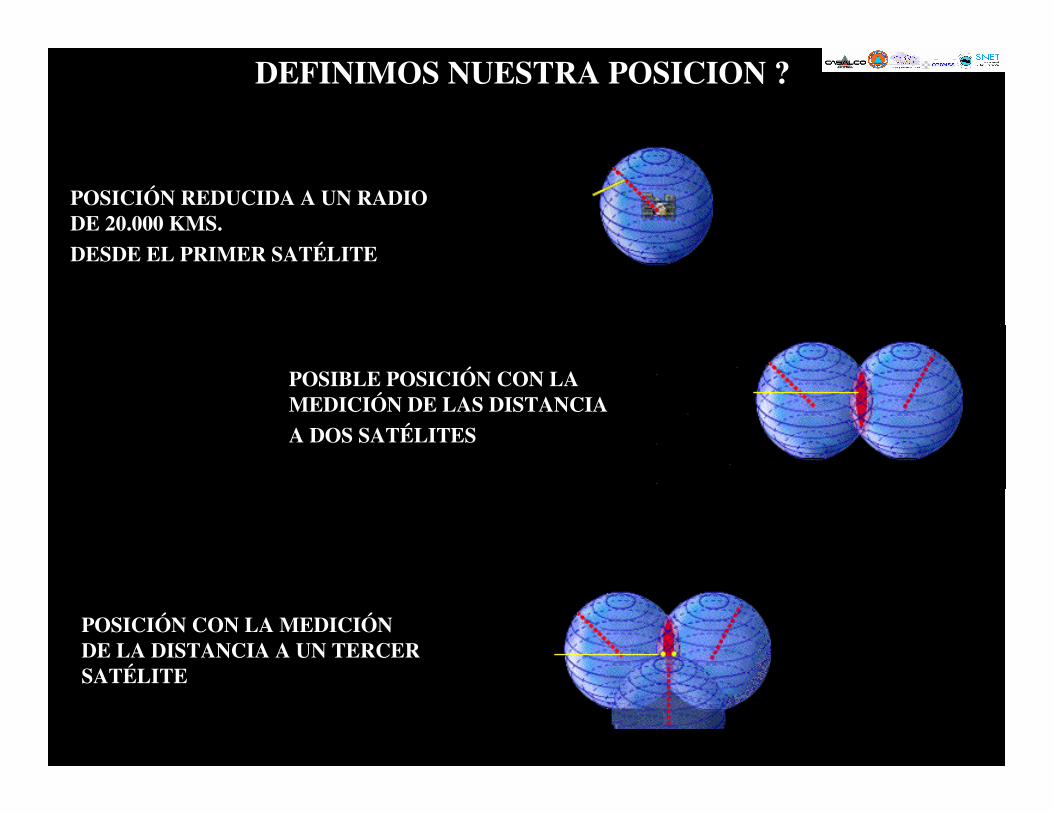
DEFINIMOS NUESTRA POSICION ?
POSICIÓN REDUCIDA A UN RADIODE 20.000 KMS.
DESDE EL PRIMER SATÉLITE
POSIBLE POSICIÓN CON LA MEDICIÓN DE LAS DISTANCIA
A DOS SATÉLITES
POSICIÓN CON LA MEDICIÓN DE LA DISTANCIA A UN TERCER SATÉLITE
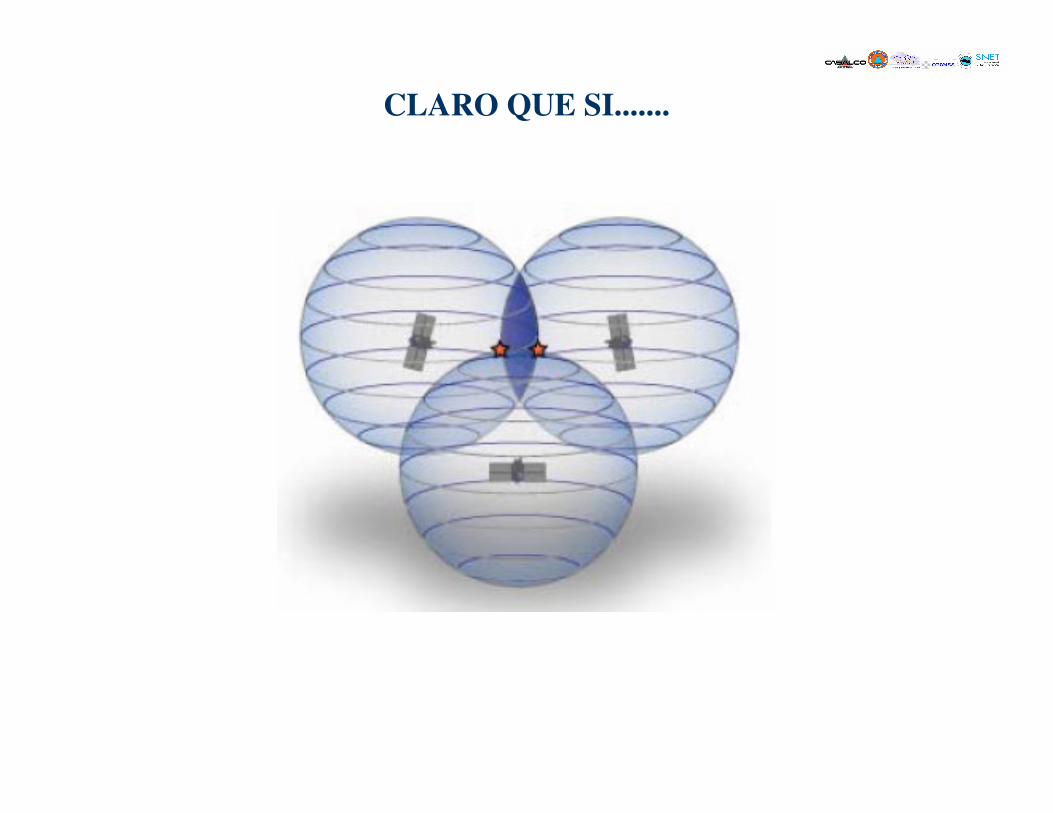
CLARO QUE SI.......
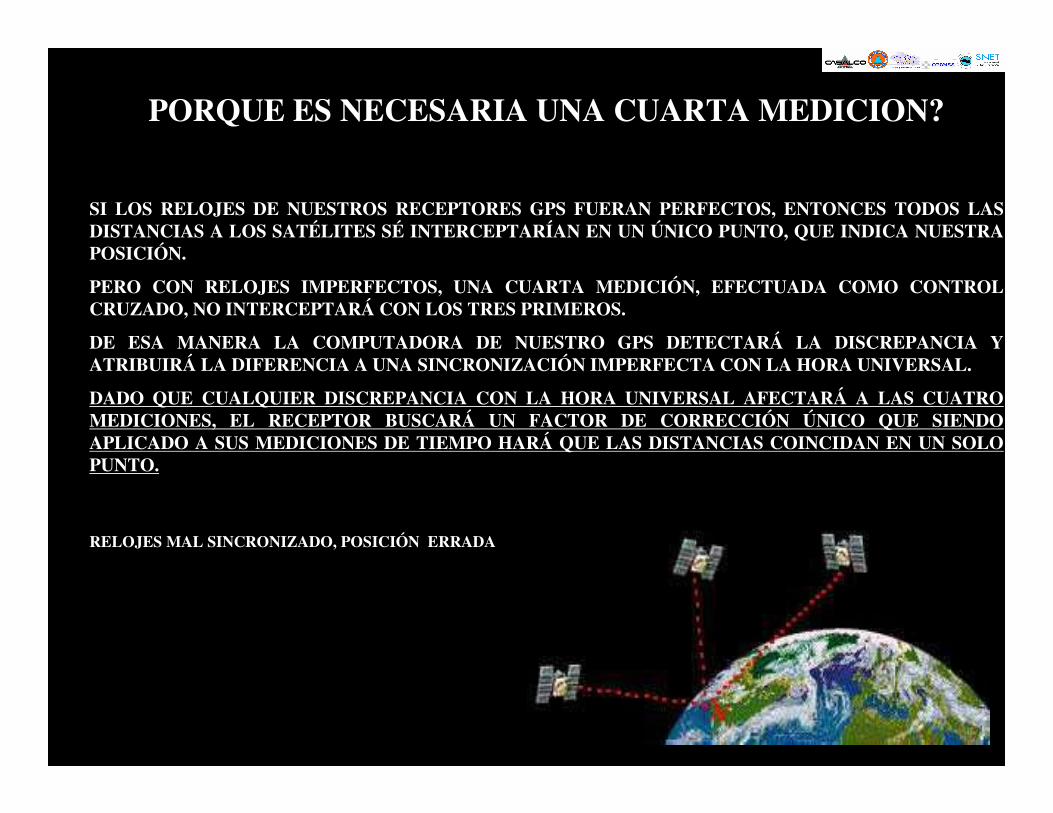
PORQUE ES NECESARIA UNA CUARTA MEDICION?
SI LOS RELOJES DE NUESTROS RECEPTORES GPS FUERAN PERFECTOS, ENTONCES TODOS LAS DISTANCIAS A LOS SATÉLITES SÉ INTERCEPTARÍAN EN UN ÚNICO PUNTO, QUE INDICA NUESTRA POSICIÓN.
PERO CON RELOJES IMPERFECTOS, UNA CUARTA MEDICIÓN, EFECTUADA COMO CONTROL CRUZADO, NO INTERCEPTARÁ CON LOS TRES PRIMEROS.
DE ESA MANERA LA COMPUTADORA DE NUESTRO GPS DETECTARÁ LA DISCREPANCIA Y ATRIBUIRÁ LA DIFERENCIA A UNA SINCRONIZACIÓN IMPERFECTA CON LA HORA UNIVERSAL.
DADO QUE CUALQUIER DISCREPANCIA CON LA HORA UNIVERSAL AFECTARÁ A LAS CUATRO MEDICIONES, EL RECEPTOR BUSCARÁ UN FACTOR DE CORRECCIÓN ÚNICO QUE SIENDO APLICADO A SUS MEDICIONES DE TIEMPO HARÁ QUE LAS DISTANCIAS COINCIDAN EN UN SOLO PUNTO.
RELOJES MAL SINCRONIZADO, POSICIÓN ERRADA
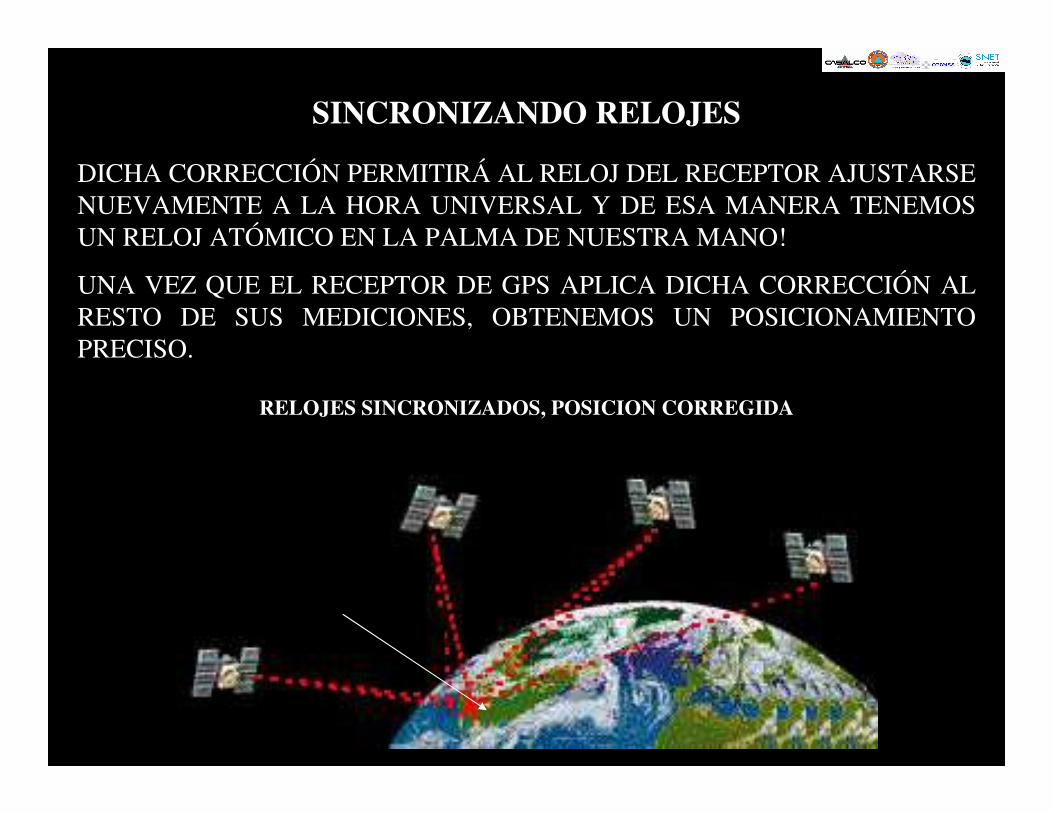
DICHA CORRECCIÓN PERMITIRÁ AL RELOJ DEL RECEPTOR AJUSTARSE NUEVAMENTE A LA HORA UNIVERSAL Y DE ESA MANERA TENEMOS UN RELOJ ATÓMICO EN LA PALMA DE NUESTRA MANO!
UNA VEZ QUE EL RECEPTOR DE GPS APLICA DICHA CORRECCIÓN AL RESTO DE SUS MEDICIONES, OBTENEMOS UN POSICIONAMIENTO PRECISO.
RELOJES SINCRONIZADOS, POSICION CORREGIDA
SINCRONIZANDO RELOJES
COMO SE MIDE LA DISTANCIA ?¿CÓMO PODEMOS MEDIR LA DISTANCIA HACIA ALGO QUE ESTÁ FLOTANDO EN ALGÚN LUGAR EN EL ESPACIO?
LO HACEMOS “MIDIENDO EL TIEMPO QUE TARDA UNA SEÑAL EMITIDA POR EL SATÉLITE EN LLEGAR HASTA NUESTRO RECEPTOR DE GPS”.
LA GRAN IDEA MATEMÁTICAMENTE ES:TODA LA IDEA SE RELACIONA EN AQUELLOS PROBLEMAS SOBRE LA VELOCIDAD QUE RESOLVÍAMOS EN LA SECUNDARIA, RECORDEMOS QUE "SI UN AUTO VIAJA A UNA VELOCIDAD CONSTANTE DE 60 KILÓMETROS POR HORA DURANTE DOS HORAS, ¿QUÉDISTANCIA RECORRIÓ?
Velocidad: 60 kms. /Hora
Tiempo: 2 horas
Distancia: ? Kms.
Planteamiento:
Velocidad (kmts./hora) x Tiempo (horas) = Distancia (kms.)
Solución:
60 km/hora x 2 horas = Distancia kms.
= 120 kms.
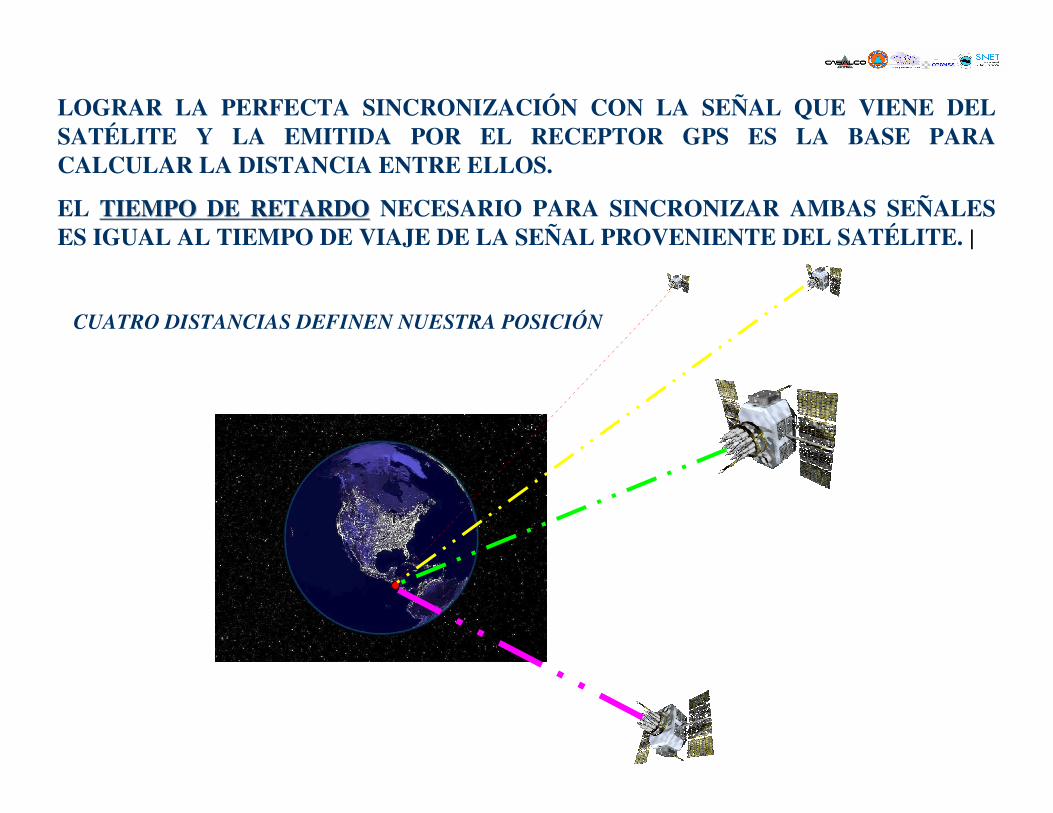
LOGRAR LA PERFECTA SINCRONIZACIÓN CON LA SEÑAL QUE VIENE DEL SATÉLITE Y LA EMITIDA POR EL RECEPTOR GPS ES LA BASE PARA CALCULAR LA DISTANCIA ENTRE ELLOS.
EL TIEMPO DE RETARDOTIEMPO DE RETARDO NECESARIO PARA SINCRONIZAR AMBAS SEÑALES ES IGUAL AL TIEMPO DE VIAJE DE LA SEÑAL PROVENIENTE DEL SATÉLITE. |
CUATRO DISTANCIAS DEFINEN NUESTRA POSICIÓN
PLANTEAMIENTO:
D (Kms.) : TR(seg.) * C (Kms/seg.)
Ejemplo:
(0.06 Seg.)(300,000 kms./Seg.) = 18,000 Kms.
Donde:
TR = Tiempo de retardo (seg.)
C = Velocidad de la luz (Kms./seg.)
D = Distancia (Kms.)
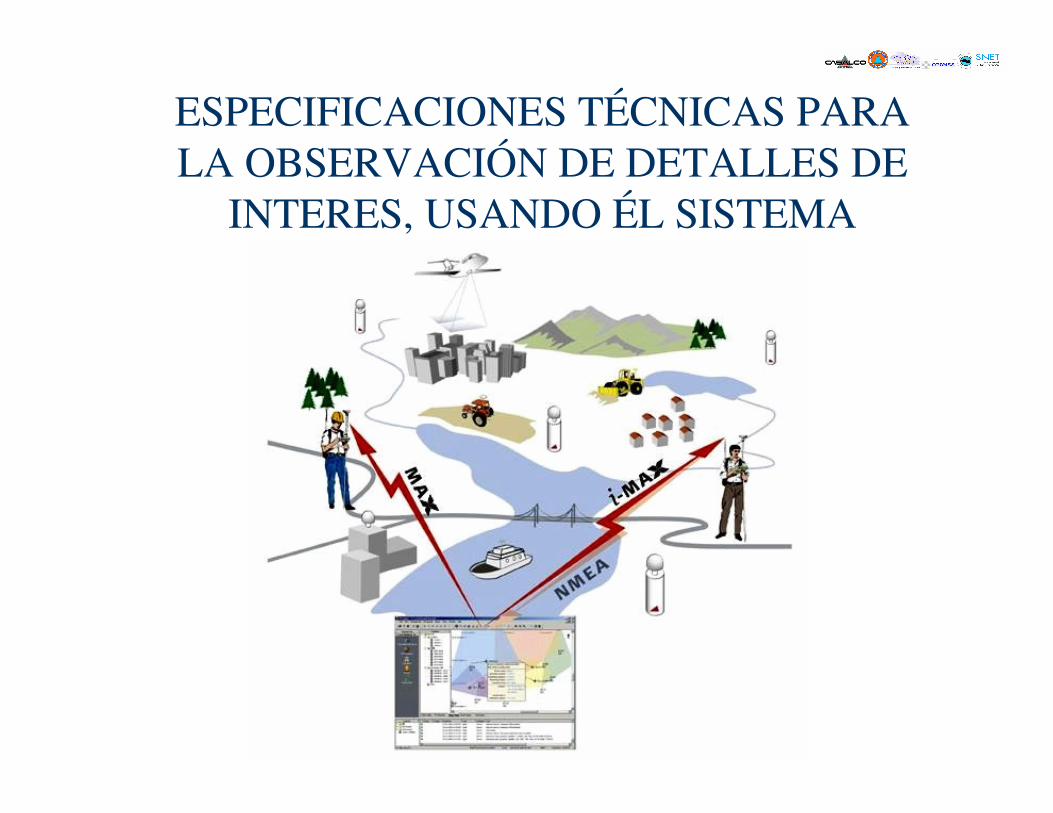
ESPECIFICACIONES TÉCNICAS PARA LA OBSERVACIÓN DE DETALLES DE
INTERES, USANDO ÉL SISTEMA

ELEVACIÓN DE LA MÁSCARA DE RECEPCIÓN SATELITAL
VENTANA DE RECEPCIÓN DE SEÑAL SATELITAL
VENTANA RECEPCIÓN DE SEÑAL SATELITAL
VENTANA RECEPCIÓN DE SEÑAL SATELITAL
VENTANA RECEPCIÓN DE SEÑAL SATELITAL
CUMPLIR CON LAS ESPECIFICACIONES TÉCNICAS DE OBSERVACIÓN:
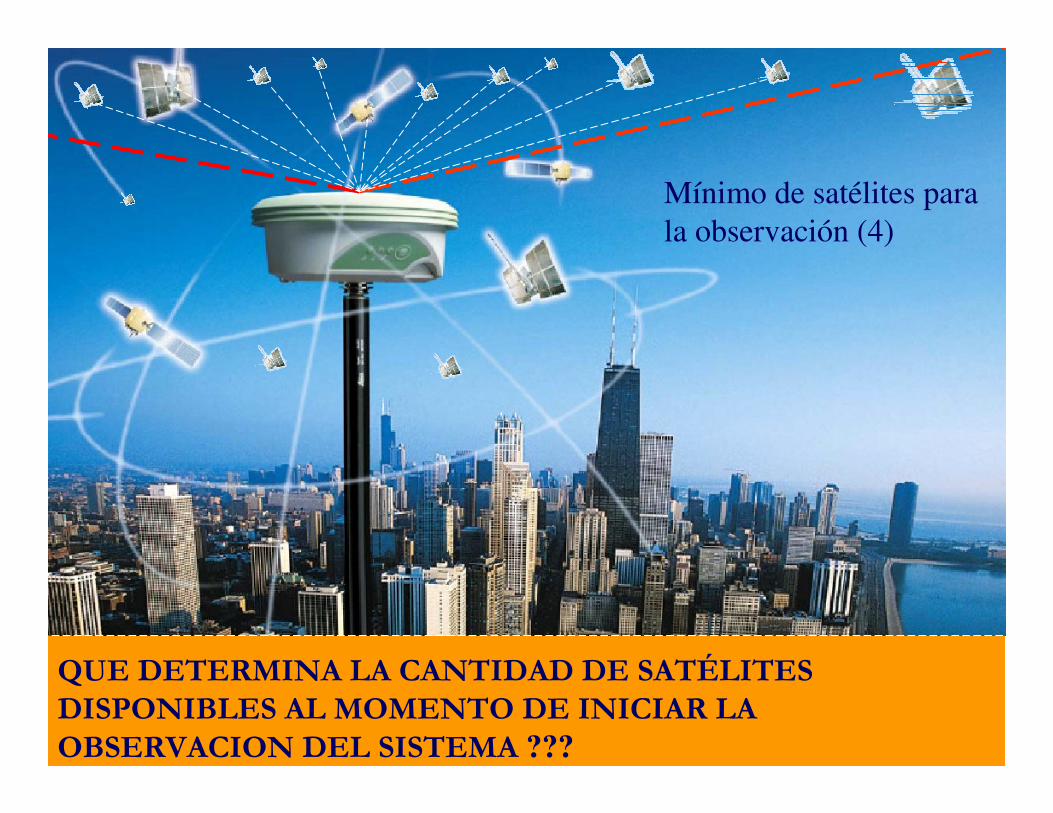
Mínimo de satélites parala observación (4)
QUE DETERMINA LA CANTIDAD DE SATÉLITES DISPONIBLES AL MOMENTO DE INICIAR LA OBSERVACION DEL SISTEMA ???
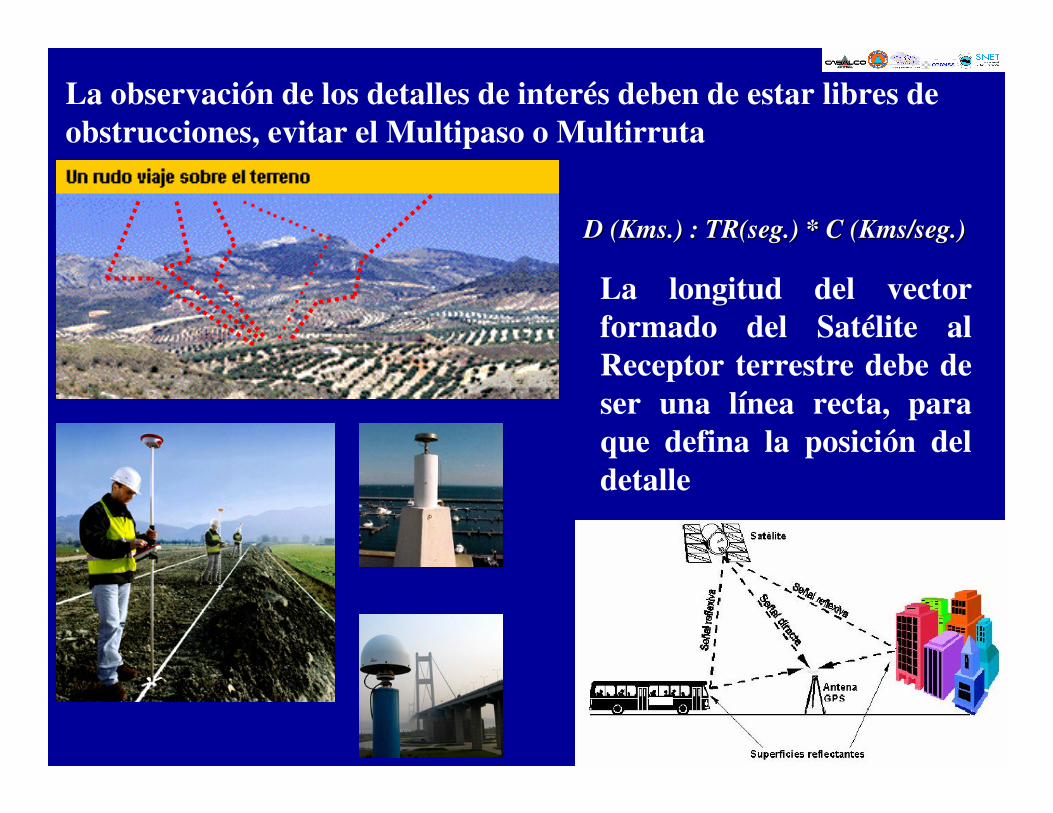
La observación de los detalles de interés deben de estar libres de obstrucciones, evitar el Multipaso o Multirruta
D (D (KmsKms.) : TR(.) : TR(segseg.) * C (.) * C (KmsKms//segseg.).)
La longitud del vector formado del Satélite al Receptor terrestre debe de ser una línea recta, para que defina la posición deldetalle

Debe de elegir la técnica de observación apropiada al proyecto y “equipo”
�Estática�Estática Rápida�Tiempo Real (RTK)�Cinemática�Cinemática de Reocupación�Navegación
Además:
•Tiempo de observación de los detalles
•Intervalos de grabación en la observación al sistema
•Presición del punto en la observación
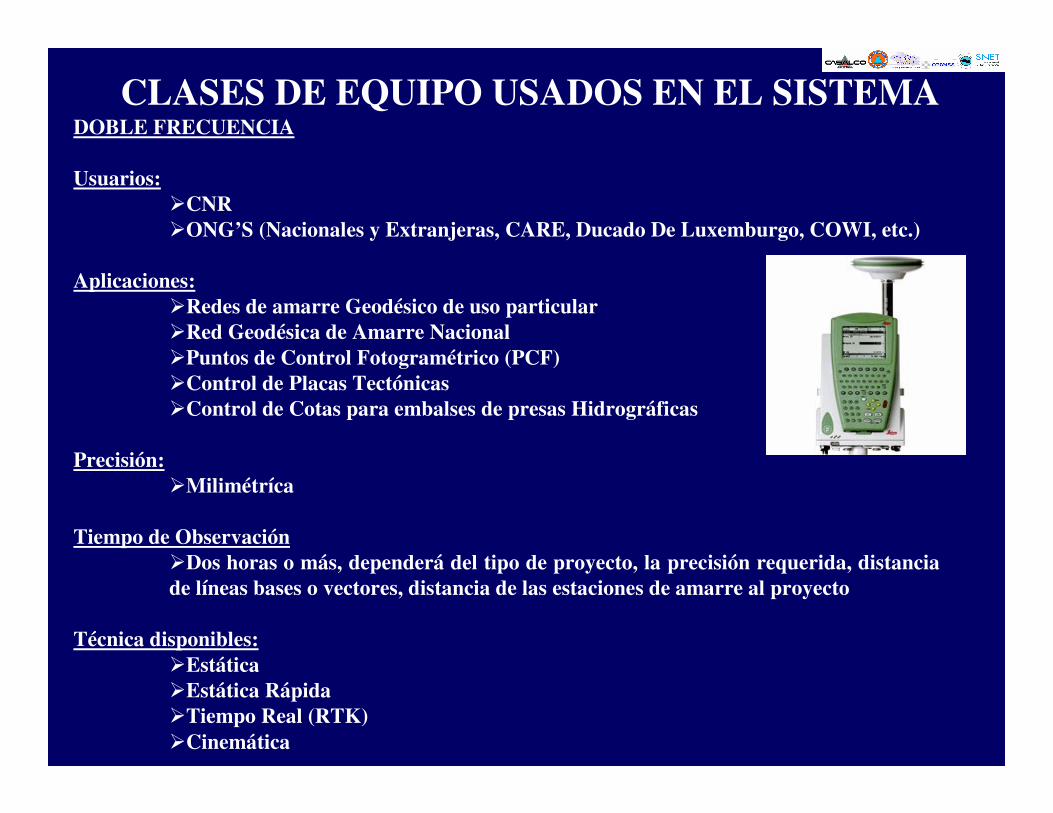
CLASES DE EQUIPO USADOS EN EL SISTEMADOBLE FRECUENCIA
Usuarios:�CNR�ONG’S (Nacionales y Extranjeras, CARE, Ducado De Luxemburgo, COWI, etc.)
Aplicaciones:�Redes de amarre Geodésico de uso particular�Red Geodésica de Amarre Nacional�Puntos de Control Fotogramétrico (PCF)�Control de Placas Tectónicas�Control de Cotas para embalses de presas Hidrográficas
Precisión:�Milimétríca
Tiempo de Observación�Dos horas o más, dependerá del tipo de proyecto, la precisión requerida, distancia de líneas bases o vectores, distancia de las estaciones de amarre al proyecto
Técnica disponibles:�Estática�Estática Rápida�Tiempo Real (RTK)�Cinemática
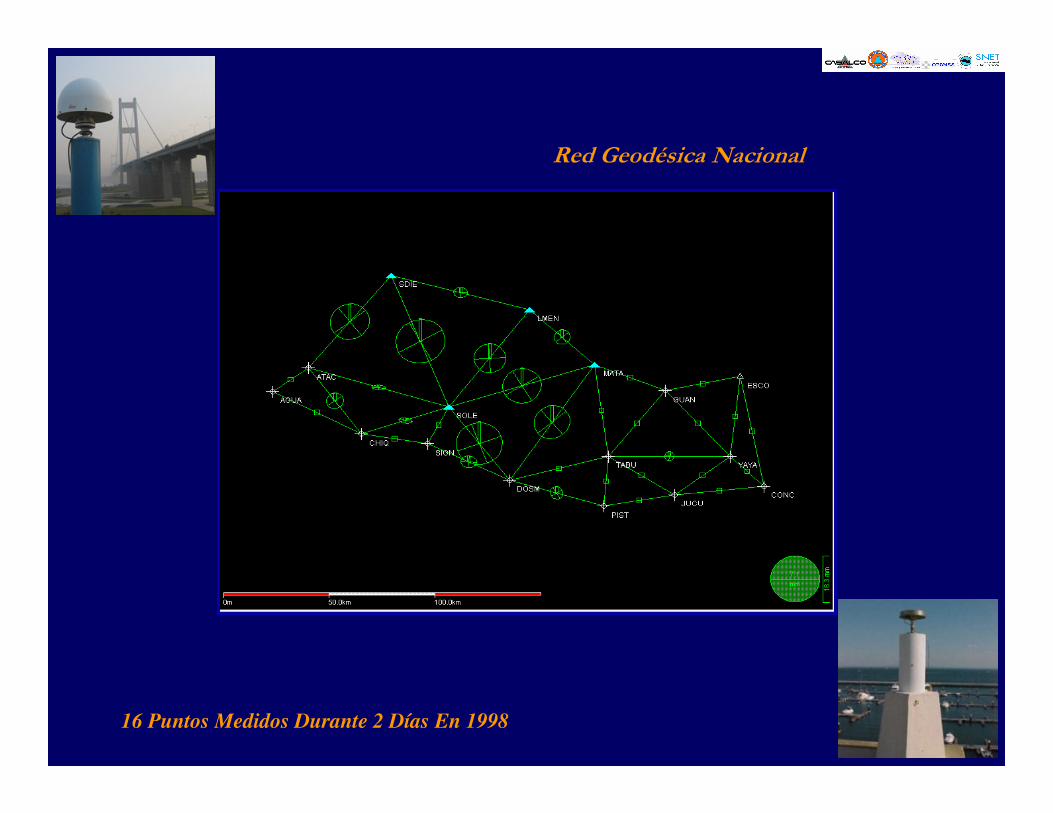
Red Geodésica Nacional
16 Puntos Medidos Durante 2 Días En 1998
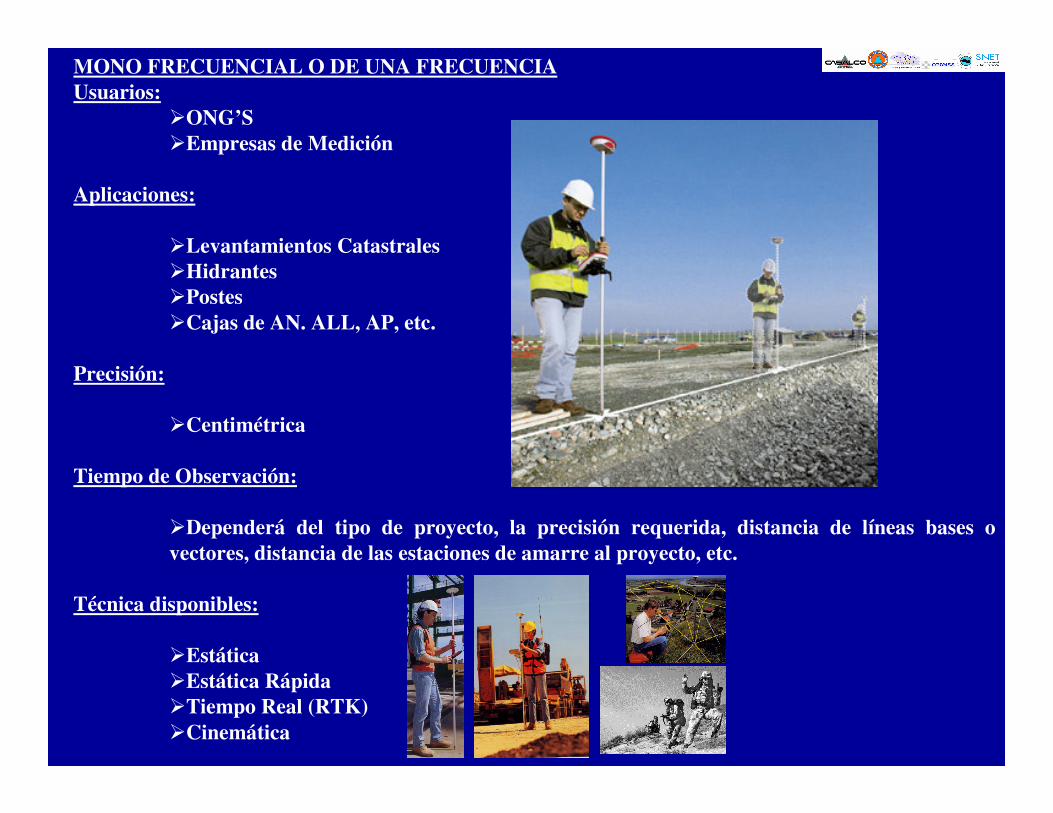
MONO FRECUENCIAL O DE UNA FRECUENCIAUsuarios:
�ONG’S �Empresas de Medición
Aplicaciones:
�Levantamientos Catastrales�Hidrantes�Postes�Cajas de AN. ALL, AP, etc.
Precisión:
�Centimétrica
Tiempo de Observación:
�Dependerá del tipo de proyecto, la precisión requerida, distancia de líneas bases o vectores, distancia de las estaciones de amarre al proyecto, etc.
Técnica disponibles:
�Estática�Estática Rápida�Tiempo Real (RTK)�Cinemática
NAVEGADORES
Usuarios:�ONG’S �Empresas de Medición�Empresa Gubernamentales, CNR, MARN, CEL, ETC.
Aplicaciones:�Navegación a Coordenadas de interés�Establecimiento de rutas�Levantamiento de calles para fines Cartográficos�Levantamiento de elementos Culturales para fines Cartográficos
Precisión:�Métrica
Tiempo de Observación:�La que indique el equipo en el momento de la observación, esta depende de las condiciones en las que se este observando el sistema (sin obstrucción).
Técnica disponibles:�Establecimiento de Marcas, Waypoints (WP)�Buscar Coordenadas�Establecimiento de Rutas�Trayectorias de recorrido, Tracks
FUENTES FUENTES

Centro Nacional De Registros (C.N.R.)
Instituto Geografico y del Catastro Nacional, I.G.C.N.
Coordinacion de Proyecto Especiales de Mantenimiento Catastral