Embed Size (px)
Citation preview
3D RECONSTRUCTION
FROM 2D IMAGESJARGALSAIKHAN IVEEL (09VL10F)
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Table of contents
¤ Introduction
¤ Objective
¤ Camera model
¤ Epipolar geometry¤ Epipolar geometry
¤ Implementation
¤ Result
¤ Conclusion
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Introduction
¤ Stereo vision
� Based on human vision system by using two or more 2D views
� Attempts to obtain depth information of 2D scene objects.objects.
¤ Usage
� Tracking moving objects in 3D space
�Gather distance information
� Construct a 3D spatial model of a scene etc.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com
Objective
¤ To implement a reconstruction algorithm for a
stereo-vision system.
¤ Designing hardware implementation for a such ¤ Designing hardware implementation for a such
system based on the FPGA.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com
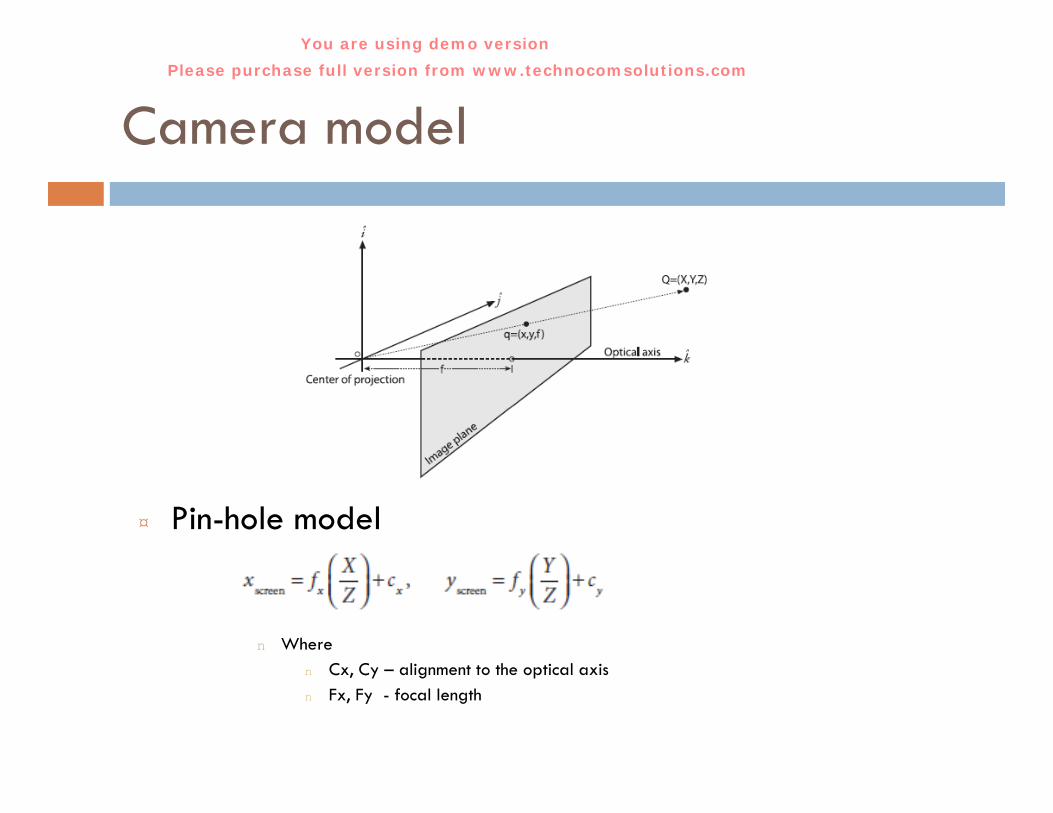
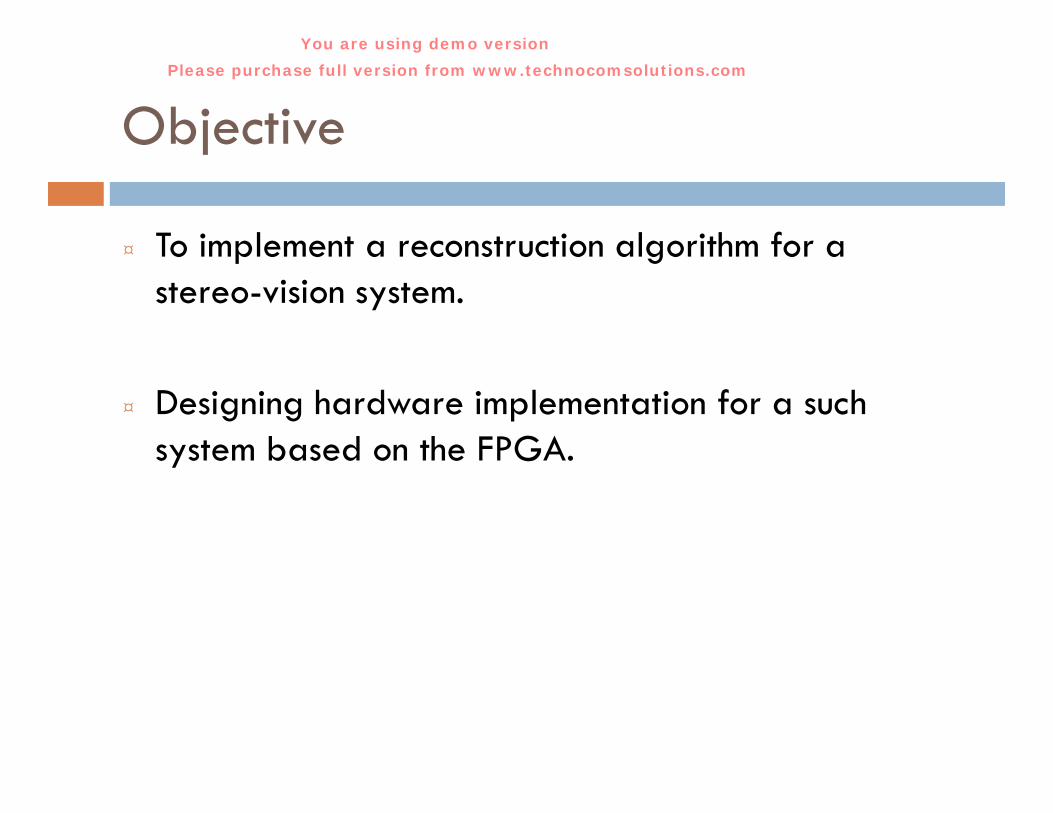
Camera model
¤ Pin-hole model
n Where
n Cx, Cy – alignment to the optical axis
n Fx, Fy - focal length
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Camera model
¤ Parameters
� Instrinsics
� Extrinsics
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com
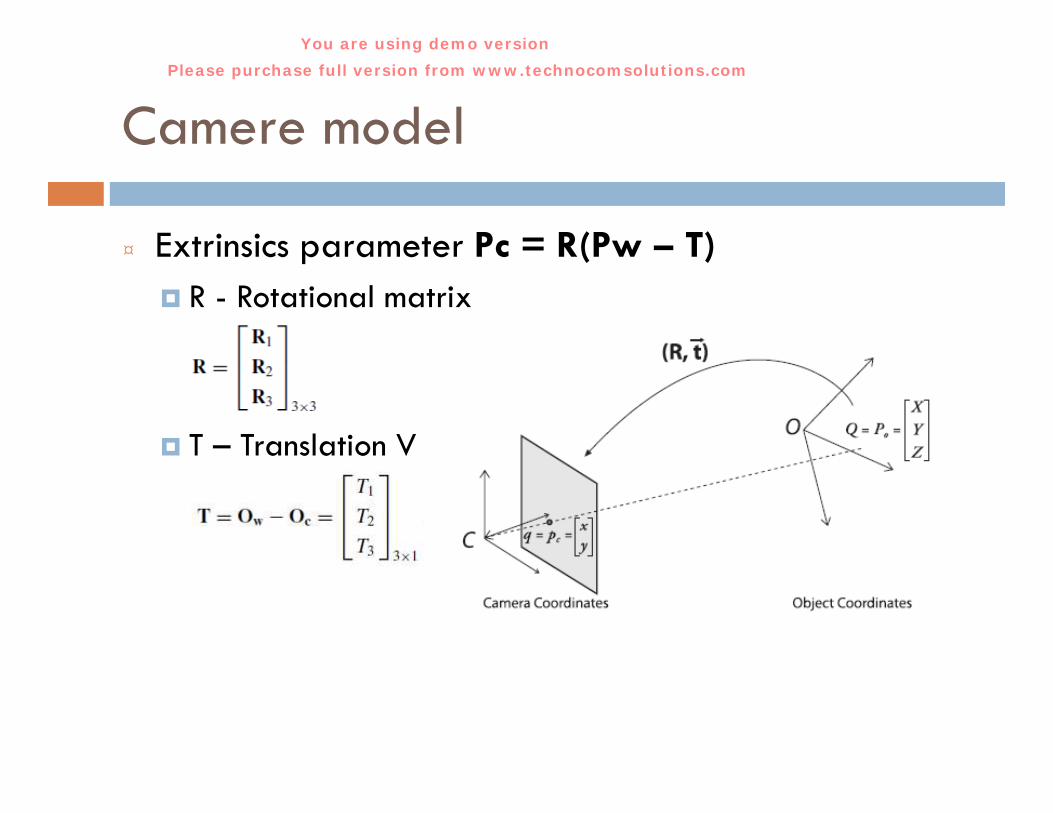
Camere model
¤ Extrinsics parameter Pc = R(Pw − T)
� R - Rotational matrix
� T – Translation V
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Camera model
¤ Rotating points by θ (in this case, around the Z-axis) is the same as counterrotating the coordinate axis by θ; by simple trigonometry, we can see how rotation changes the coordinates of a point
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Chessboard Calibration
¤ cvFindChessboardCorners()
� Finds a position of the corners of the chessboard in a
given image
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

cvDrawChessboardCorners()
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Stereo imaging pipeline
¤ Undistortion� Mathematically remove radial
and tangential lens distortion
¤ Rectification � Images are row-aligned and
rectified.
¤ Correspondence.� Disparity map- differences
coordinates of the same features.
¤ Triangulation. � Reprojection, and the output is a
depth map.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Essential & Fundamental Matrices
¤ Essential Matrice� E – contains information about the translation and rotation which relate
physical space of two camera
¤ Fundamental MatriceF – contains information about the translation and rotation which relate pixel ¤ F – contains information about the translation and rotation which relate pixel
coordinates of two camera ( essential matrices + intrinsics parameters of both camera)
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

To Compute F-Matrice
¤ cvFindFundamentalMat
� Calculates the fundamental matrix from the
corresponding points in two images
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Epipolar lines
¤ Given a feature in one image, its matching view in the other image
must lie along the corresponding epipolar line.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com
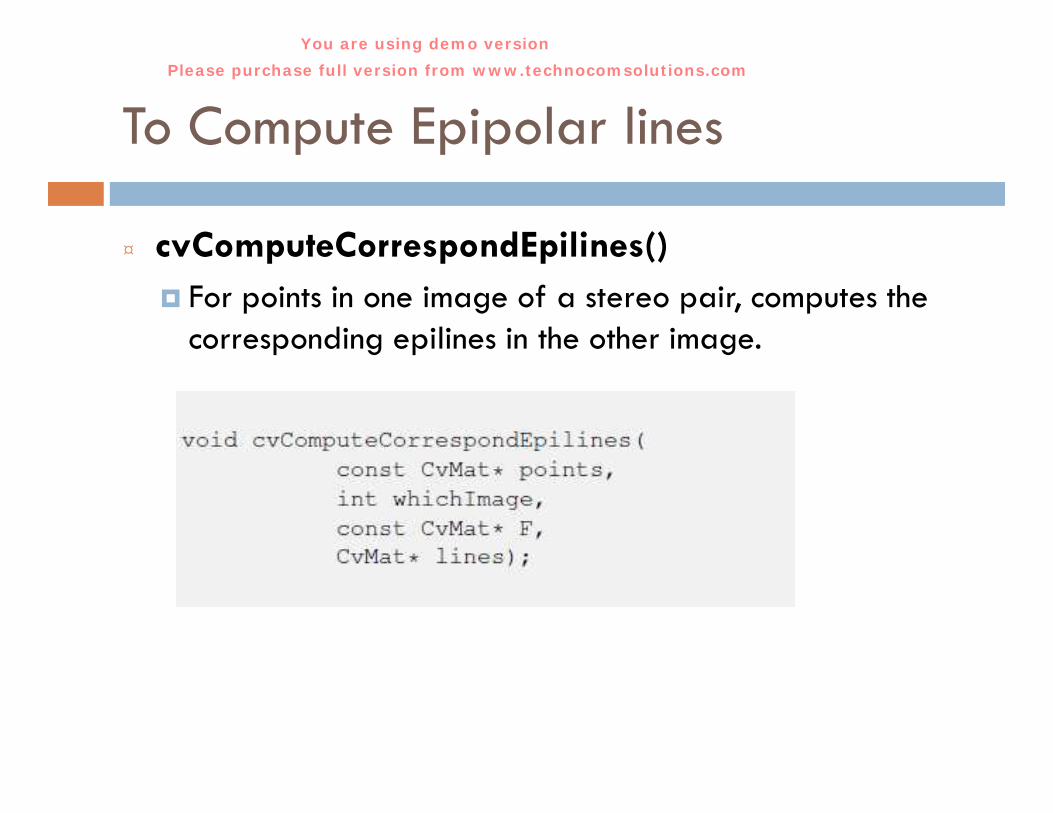
To Compute Epipolar lines
¤ cvComputeCorrespondEpilines()
� For points in one image of a stereo pair, computes the
corresponding epilines in the other image.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Rectification
¤ Stereo image transformations in corresponding epipolar lines in all images become collinear in all images become collinear with each other and with the image scanning lines.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Rectification
¤ Bouguet’s algorithm for stereo rectification
� Arguments are the rotation matrix and translation (R,
T) between the stereo images
�Minimizes the resulting reprojection distortions
�Maximizins common viewing area
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

cvStereoRectify()
¤ Computes rectification transforms for each head of
a calibrated stereo camera
�Outputs are Rotation matrice & Translation vector for
both stereo cameras.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Stereo Correspondence
¤ Stereo correspondence� matching a 3D point in the two different camera views
� can be computed only over the visual areas in which the views of the two cameras overlap.
¤ cvFindStereoCorrespondenceBM()� Implemented as a fast and effective block-matching stereo algorithm in OpenCV
� Algorithm Stagesn Prefiltering to normalize image brightness a 1. nd enhance texture.
n Correspondence search along horizontal epipolar lines using an SAD window.
n Postfiltering to eliminate bad correspondence matches.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

cvFindStereoCorrespondenceBM()
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Implementation in OpenCV
¤ Simplified stages of the code
� Calibrate the stereo web camera using Chessboard
Pattern technique
� Rectification of the stereo pair images based on the
Bouguet’s algorithm.
� Finding the feature correspondence on the rectified
images and calculating the output disparity image.
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com
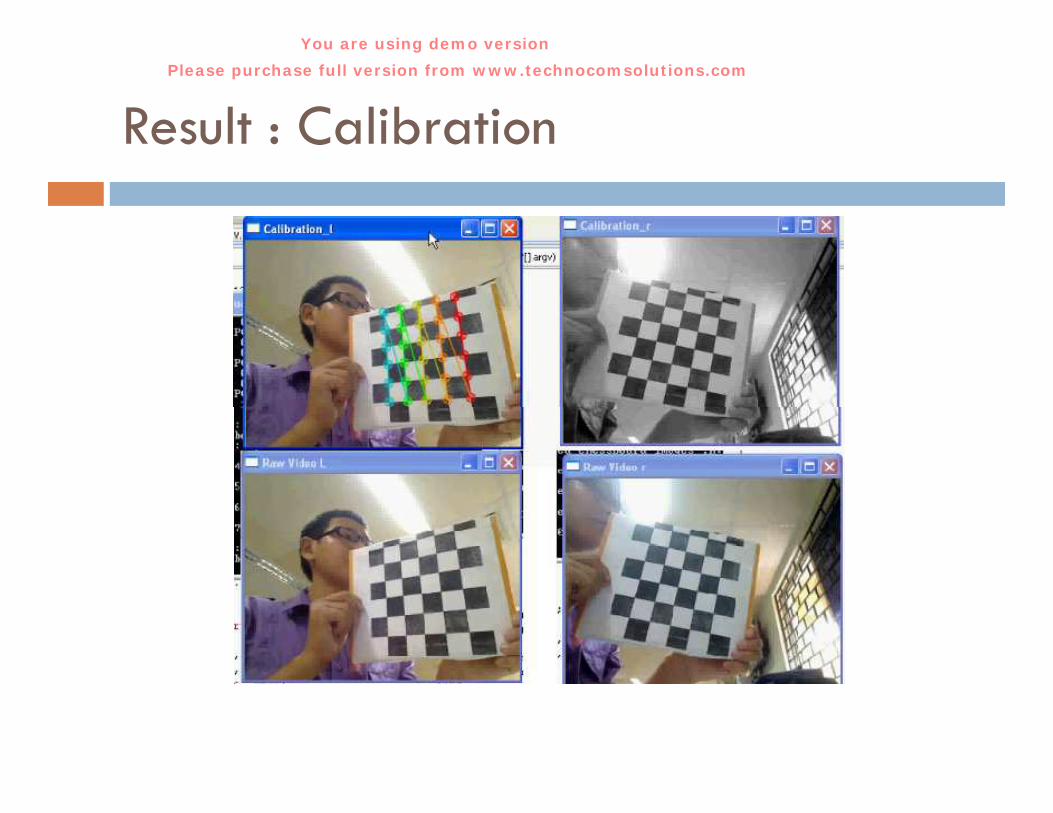
Result : Calibration
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Result : Rectification
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Result : Disparity Map
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com

Conclusion
¤ Camera model and Epipolar geometry
¤ Stereo vision and its implementation pipeline
¤ Implementation based on the OpenCV Library
You are using demo versionPlease purchase full version from www.technocomsolutions.com
You are using demo versionPlease purchase full version from www.technocomsolutions.com