Embed Size (px)
Citation preview
Spatial and spatio-temporallog-Gaussian Cox processes:
re-defining geostatistics
Peter J Diggle
Lancaster University and University of Liverpool
combininghealth information,
computation and statistics
CHICAS
Geostatistics
traditionally, a self-contained methodologyfor spatialprediction, developed at Ecole des Mines,Fontainebleau, France
nowadays, that part of spatial statisticswhich isconcerned with data obtained by spatiallydiscretesampling of a spatially continuous process

Model-based Geostatistics(Diggle, Moyeed and Tawn, 1998)
the application of general principles of statisticalmodelling and inference to geostatistical problems
which means:
− formulate a model for the data
− use likelihood-based methods of inference
− answer the scientific question

Geostatistical data and model : lead pollution in Galicia
5.0 5.5 6.0 6.5 7.0
46.5
47.0
47.5
48.0
X Coord
Y C
oord
S(x) pollution surface
xi sampling location
Yi measured pollution
Yi|S(·) ∼ N(S(xi), τ 2)

Point processes
Stochastic models for arrangements of points in space and/ortime
Scientific focus on understanding why the points are wherethey are:
− absolutely
− and/or relatively
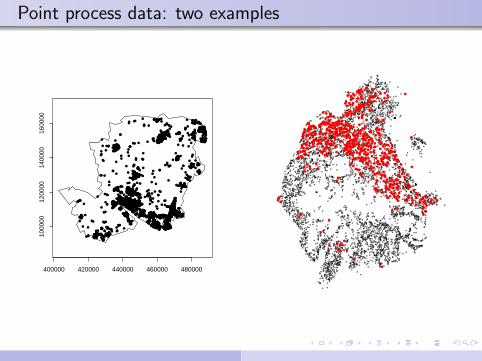
Point process data: two examples
400000 420000 440000 460000 480000
1000
0012
0000
1400
0016
0000
●
●
●
●
●
●
●
●
●
●●
● ●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
● ●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●
● ●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
● ●
●
●
●●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
● ●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●●
●●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
● ●
● ●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●● ●
●● ● ●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
● ●
●
●
●
●
●
●
●
●●
● ●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●●
●
●
●
●●●
●
●
●
●●
●
●
●
●
● ●
●
●
●
●
● ●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●
●
●
●
●
● ●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
● ●
●
●
● ●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
● ●
●
●●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●●
●
●
●
●
●
●
●
●
●
●●
●●
●●
●●
●
●
●●
●
●
● ●
●
●
●
●
●
●
●
●
●
●●●
●●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●●
●
●
●●
●●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●●●
●●
●
●
●
●
●
●●
●
●
●
●●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
● ●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●
●
●
●
●
●●●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
● ●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●●
●
●
●●
●
●
●●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●●
●
●
●●
●
●
● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●
● ●
●
●
● ●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
● ●●
●●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
● ●
●
●
●
●
●
●
●
●
●
●
● ●●
●
● ●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
● ●●
●●
●
●
●● ●
●
●
●
●
●●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●●
●
●
●●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
● ● ●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●●
●
●
●●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●●●
●
●
●●
●
●
●●
●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●
●●
●
●
●
●
●
●
●● ●
●
●
●●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●●
●●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
● ●
●
●
●
●
●● ●
●
●●●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
● ●
●
●● ●
●
●
●●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●●
●
● ●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
● ●
●
●
●
●
●
● ●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●● ●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
● ●
●
●
● ●
●●
●
●
●
● ●
●
●
●●
●
●
●
●
●
●
●
●●●
● ●
●
●
●
●
●
●
●
●
●
●
●●
●●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●● ●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
● ●
●●
●●
●
●
●
● ●●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
● ●
●●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●●
●
●
●
●
●
●
●●
●●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●●●
●
●
●
●
●●
●●
●●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●●
● ●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
● ●●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●●
●●
●
●
●●●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
● ●
●
●●
●
●
●
●
●
●
●
●
●●
●●
●●
●
●●●
●
●
●
●
●
● ● ●
●
●
●
● ●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
● ●
●
●
●
●
●
●
●
●●
●●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
● ●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
● ●
●
●
●● ●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●● ●
●
●
●
●● ●
●● ●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
● ●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●● ●
●
●
●●
●
●●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●●
●
●●
●
●
●
●
●●
●
●●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
● ●
●
●
●
●●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●●
●
●
● ●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●●
●●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
● ●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●● ●
●●
●
● ●●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
● ●
●
●
●
●●
●●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
● ●
● ●
●
●
●
●
●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
● ●
●
●
●●
● ●
●
● ●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●● ● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
● ●●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●●●●●●●●●
●●●●●
●●●
●●
●●●●●●●●●●●
●●
●
●●●
●●
●
●
●
●
●
●
●●●●
●●●
●●
●●
●●
●●
●●
●●●
●
●●
● ●●
●●
●●●
●
●●
●
●●
●●
●●●
●●
●
●●●●●
●
●●
●●
●●
●●●
●●●●
●
●●
●
●
●●
●
● ●
●●
●●
●●● ●
●
●●●●
●
●●● ●
● ●
●
●
●●
●● ●●●●
●●
●
●●
●
●●
●
●
●●
●●●
●●
●●
●●
●●
●●
●●
●
●
●
●
●●
●
●
●●●●
●●●
●
●●
●●●
●
●●
●
●
●●●
●●●
●
●
●
●
●
●●
●●
●● ●
●
●
●
●
●●●●
●●
●●
●
●
●
●● ●
● ●
●●●
●
●●●●
●
●
●
●●
●●●●●
●●●● ●●
●●
●
●●
●●●
●
●●
●● ●
●
●●
●●
●●
●●●
●●● ● ●
●●●
●●●
●
●
●
●
●
●
●
●
●
● ●
●●
●
●●●
●
●
●●
●
● ●●●
●●●
●
●●
●●
● ●
●
●
●
●
●
●
●
●
●●●
●
●
●●
●
●
●
●●●●
●
●
●●
●
●
●●
●
●●
●
●●●
●●●●●
●●●
●●
●
●●●
●●
●
●
●
●
●●
●
●
●●●
●
●
●
●●
●
●
●
●
●
● ●
●
●
●●
●
●●
●●
●
●●●
●
●
●
●
●●●
●●
●
●●
●●
●
●
●●●
●
●
●
●●
●●
●
●
●
●
● ●
●
●●
●
●
●
●
●
●●
●
●
●
●●
●
●●
●
● ●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●●
●●
●
●
●
●●
●
●●
●
●●
●●
●●
●
●
● ●
●
●●
●●●
●●●
●
●●
●●●
●
●
●
●●
●
●
●
●●●
●●●
●
●●●●●
●
●●●●●
●●
●
●●●
●●●●
●● ●
●
●
●●●●
●
●●
●
●
●● ●●
●
●
●●
●● ●
●●
●●
● ●
●●
●
●
●
●●
●
●
●●
●
●
●
●●
●
●● ●
●
●●
●●
●●●
● ●●
●
●
●●
●
●●
●●
●●●
●
●●
●
●●
●●
●●●●
●●●
●
●
●●
●
●
●●
●●●
●
●●
●●
●●
●●●●
●
● ●●
● ●
● ●
●
●
● ●
●
●
●

Cox process
Poisson process
λ(x) : intensity function
event-locations mutually independent, probability densityproportional to λ(x)
Requires: λ(x) ≥ 0 and∫
A λ(x)dx <∞, for any finite region A
Cox process
λ(x) is unobserved realisation of stochastic process Λ(x)
Trans-Gaussian Cox process
Cox process with:
Λ(x) = F{S(x)}
S(x) ∼ Gaussian process
Log-Gaussian Cox process: F(·) = log(·)
introduced by Møller, Syversveen and Waagepetersen (1998)
popular because of analytic tractiability (moments, etc)
but any F(·) OK if using Monte-Carlo methods of inference

LGCP as a geostatistical model
● ●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●

LGCP as a geostatistical model
2
2
2
2
1
1
1
5
1
2
4
2
1
4
3
8
5
2
2
6
3
4
5
1
1
0
5
3
7
3
2
2
3
2
4
5
3
11
2
6
1
5
7
10
12
16
5
3
6
2
4
6
5
5
2
6
5
4
3
6
4
4
1
0

LGCP as a geostatistical model
● ●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●

LGCP as a geostatistical model
● ●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●

LGCP as a geostatistical model
● ●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
● ●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●

Re-defining geostatistics
Old:
unobserved, real-valuedstochastic processS = {S(x) : x ∈ A}
pre-specified locations{xi ∈ A : i = 1, ..., n}measurements
Y = {Yi : i = 1, ..., n} atlocations xi
use model for [S,Y] = [S][Y|S]to predict S
New:
unobserved, real-valuedstochastic processS = {S(x) : x ∈ A}
data D
use model for [S,D] = [S][D|S]to predict S
New definition shifts focus from data to problems

LGCP model-fitting
Ingredients:
latent Gaussian process S
data D
parameters θ
Predictive inference via MCMC or INLA
[θ, S,D] = [θ][S|θ][D|S, θ]⇒ [S|D] =
∫[S|D; θ][θ|D]dθ
∫[S|D; θ][θ|D]dθ ≈ [S|D; θ] ?
Applications
intensity estimation: hickories in Lansing Woods
spatial segregation: BTB in Cornwall
disease atlases: lung cancer mortality in Spain
real-time spatial health surveillance: AEGISS

Intensity estimation: hickories in Lansing Woods
●
●
●●
●
●●●●
●●●
●●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●●●
●
● ●
●●
● ●
●
●● ● ●
●●
● ● ●●●●
●● ●
●
●
●●●
●●●
●
●●
●
●
●
●● ●
●●●
● ●●●●
●
●
●●●●●
●
●●
●●●●●
●
●●
●●●●
●●
● ●●
●● ●
●●
●● ●●●
●●
●●●
●●
●●●
●●●
● ●●●●
●●
●●
●●●
●●
● ●
●
●●●●●●●
●●●
●
●
●●
●
●●●●
●●●
●●
●●
●
●●●●● ●
● ●
●
●●
●●●
●●●●
●
●
●
●●
●●●●
●●●●
●●
●●● ●
●
●
●
●
●
●●
●●●
●
●●
●
●●
●
● ●●●
●●
●
●●●
●
●
●
●● ●
● ●
●●●●●
●
●
●
●● ●
●
●●●●
●●
●●
●
●
●●●
●
●
●●●
●●●●
●
●
●●
●
●
●
●●
●●
●●
●●
●●●●
●
●●
●
●
● ●
●●
●●●●
●●●●●●
●●●●●
●●
●
● ●
●
●
●●●●
●
●●●
●
●
●
●●●●
●
●
●●●●●
●
●●
● ●
●
● ●
●●●
●
●
● ●●
●●
●
●
●●●
●●●●●
●
●
●●
●
●
●● ●●
●
●
●
●●●
●
●●
●●
● ●
●●
●
●●● ●
●
● ●
●●●●
●● ●●
●●
●●
●● ●
●●
●
●●●●
● ●●
●
●●●
●●
●●
●
●
●
● ●●
●
● ●
●
●●
●
●
●●●
●●●●● ●
●●
●●
●
●●●●
●
● ●
●
●
●
●●●●
●
●●●●●●●●
●
●
●●
●●
●● ●
●●
●●●
●● ●
● ●
●
●
● ●●
●●●●●
●●
●
● ●●●
●
●●
●●
●
●●
●●
●
●
●●
●●
●
●●●
●
●
●
●
●●
●
●
●
●
●
●●
●
●●
●●●
●●
●●●
●●
●
●●●
●●●●● ●●
●
●● ●
●●●
●
●
●●●
●
●● ●●●
●●●● ●
●
●●
●●
●
●
●
● ●
●
●●
●
●●
●
●●
●
●
●●●●● ● ●
●●
●● ●
●
●●●
●●●
●●
●●●
●
●●●
●
●
●●● ●
●●●
●● ●
●
●●
●●
●
●
●
●●
●
●
●●●●●
●
●
●
● ●
●●
●
●●
●●
use data to construct non-parametricestimate of λ(x)
lots of existing methods, butinferential standing unclear
LGCP approach enables predictiveinference
Λ(x) = exp{S(x)}S(·) ∼ SGP(β, σ2, ρ(u))
ρ(u) = exp(−u/φ)

Intensity estimation: Lansing Woods results
Parameter estimation
β
Den
sity
−15 −10 −5 0 5 10 15
0.0
0.5
1.0
1.5
2.0
σ
Den
sity
0.0 0.5 1.0 1.5 2.0 2.5
01
23
4φ
Den
sity
0 10 20 30 40
0.00
0.05
0.10
0.15
Prediction
0 20 40 60 80 100
020
4060
8010
0
0.0
0.2
0.4
0.6
0.8
1.0
●
●
●●
●
●●●●
●●●
●●
●
●
●
●
●
●●●
●●
●●
●
●●
●●●●
● ●
●●● ●
●
●●● ●●●
● ●●●●●
●● ●
●●
●●●●●●
●
●●
●●
●
●● ●
●●●
●●●●●
●●
●●●●●●
●●
●●●●●●
●●
●●●●
●●●●●
●● ●
●●
●●●●●
●●
●●●
●●
●●●●●●
● ●●●●●●
●●
●●● ●
●●●
●
●●●●●●●
●●● ●
●●●
●
●●●●●●●
● ●
●● ●
●●●●● ●
●●
●
●●
●●●
●●●●
●●
●
●●
●●●●
●●●●
●●
●●● ●●
●
●
●
●●● ●●●
●●●
●●●●
● ●●●●●
●●●●●●
●●● ●
●●
●●●●●
●
●
●
●● ●
●
●●●●
●●●●
●
●
●●●●
●●●
●●●●
●
●
●
●●
●
●
●
●●●●
●●
●●
●●●●
●
●●●
●
●●
●●
●●●●
●●●●●●
●●●●●●●
●
● ●
●
●●
●●●●
●●●●
●
●
●●●●
●
●
●●●●●
●
●●
●●●
● ●
●●●
●
●
● ●●
●●●
●●●●
●●●●●
●●
●●●
●
●● ●●
●●
●
●●●●
●●
●●● ●
●●
●
●●● ●
●
● ●●●●
●
●●●●
●●●●●
● ●●●●
●●●●
●●●
●
●●●
●●
●●●
●
●
●●●
●
● ●
●
●●
●
●
●●●
●●●●● ●
●●● ●
●
●●●●
●
● ●●
●
●
●●●●
●
●●●●●●●●
●●
●●●
●
●● ●
●●
●●●
●● ●
● ●
●
●●●●
●●●●●●
●
●
●●●●
●●
●
●●
●
●●●
●●
●
●●
●●
●
●●●●
●●
●
●●
●
●
●
●●
●●
●
●●
●●●●●
●●●
●●●
●●●
●●●●●●●
●
●●●●●●
●
●●●●
●●● ●
●●
●●●● ●
●●
●●●
●
●●
● ●
●
●●
●
●●
●
●●●
●
●●●●● ●●
●●●●●
●●●●
●●●
●●
●●●
●●●●
●
●
●●● ●
●●●
●● ●
●●
●●●
●
●
●
●●
●●
●●●●●
●
●
●● ●
●●●●●
●●
0 20 40 60 80 100
020
4060
8010
0
0.05
0.10
0.15
0.20
0.25
0 20 40 60 80 100
020
4060
8010
00.0
0.2
0.4
0.6
0.8
1.0
●
●
●●
●
●●●●
●●●
●●
●
●
●
●
●
●●●
●●
●●
●
●●
●●●●
● ●
●●● ●
●
●●● ●●●
● ●●●●●
●● ●
●●
●●●●●●
●
●●
●●
●
●● ●
●●●
●●●●●
●●
●●●●●●
●●
●●●●●●
●●
●●●●
●●●●●
●● ●
●●
●●●●●
●●
●●●
●●
●●●●●●
● ●●●●●●
●●
●●● ●
●●●
●
●●●●●●●
●●● ●
●●●
●
●●●●●●●
● ●
●● ●
●●●●● ●
●●
●
●●
●●●
●●●●
●●
●
●●
●●●●
●●●●
●●
●●● ●●
●
●
●
●●● ●●●
●●●
●●●●
● ●●●●●
●●●●●●
●●● ●
●●
●●●●●
●
●
●
●● ●
●
●●●●
●●●●
●
●
●●●●
●●●
●●●●
●
●
●
●●
●
●
●
●●●●
●●
●●
●●●●
●
●●●
●
●●
●●
●●●●
●●●●●●
●●●●●●●
●
● ●
●
●●
●●●●
●●●●
●
●
●●●●
●
●
●●●●●
●
●●
●●●
● ●
●●●
●
●
● ●●
●●●
●●●●
●●●●●
●●
●●●
●
●● ●●
●●
●
●●●●
●●
●●● ●
●●
●
●●● ●
●
● ●●●●
●
●●●●
●●●●●
● ●●●●
●●●●
●●●
●
●●●
●●
●●●
●
●
●●●
●
● ●
●
●●
●
●
●●●
●●●●● ●
●●● ●
●
●●●●
●
● ●●
●
●
●●●●
●
●●●●●●●●
●●
●●●
●
●● ●
●●
●●●
●● ●
● ●
●
●●●●
●●●●●●
●
●
●●●●
●●
●
●●
●
●●●
●●
●
●●
●●
●
●●●●
●●
●
●●
●
●
●
●●
●●
●
●●
●●●●●
●●●
●●●
●●●
●●●●●●●
●
●●●●●●
●
●●●●
●●● ●
●●
●●●● ●
●●
●●●
●
●●
● ●
●
●●
●
●●
●
●●●
●
●●●●● ●●
●●●●●
●●●●
●●●
●●
●●●
●●●●
●
●
●●● ●
●●●
●● ●
●●
●●●
●
●
●
●●
●●
●●●●●
●
●
●● ●
●●●●●
●●
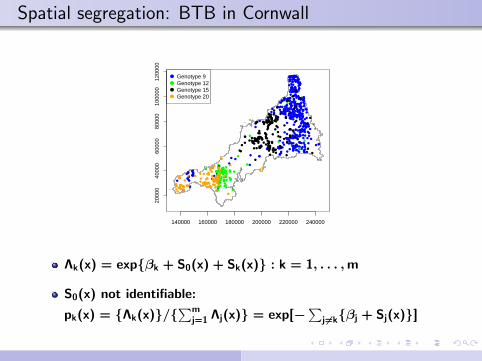
Spatial segregation: BTB in Cornwall
140000 160000 180000 200000 220000 240000
2000
040
000
6000
080
000
1000
0012
0000
●
●
●
●
●
●●
●
●●●●
●
●
●●
●
●
●
●
●
●
●
●● ●
●
●
●●●●
●
●
●
●●●●
●
●●●
●●●
●●●
●●●
●●
●
●●●
●●●
●●
●
●●●
●
●●●●
●● ●
●
● ●●
●●●
●●
●
●
●●
●●
●●●
●●●
●●●●●● ●●●
●●
●●●●
● ●
●
●
●●●●●●●
●●
●
●
●
●
●
●
●●
●
●
●●●
●●
●
●●
●
●●●
● ●
●
●
●●
●●
●●●
●
●
●●●●
●
●
●●●
●
●●● ●
●
● ●●●
●
●●
●
●
● ●●● ●●
●
●
●
● ●
●
●
●●●●
●
●
●
●
●●
●●
●
●
●● ●
●
●
●●●●●●●
●●●●
●●
●●●
●●● ●
●●●●
●●●
●
●●
●●● ●●●●●●●
●
● ●
●●
●
●●●
●
●●
●●●●●●
●
●●●● ●
●●●
●●●
●
●
●
●
●
●●●●●●
●●
●●
●
●●●●●●●●●
●
●
●
●
●●
●
●
●
●
●● ●●
● ●●
●●● ●
●●
●
●
●●●
●
● ●
●
●
●
●●
●● ●
●●
●
●
●
●●●● ●●●
●
●●
●●● ●●
●
●
●
●
●
●
●●
●
●●●
●●
●
●● ●●●●
●
●
●●
●●●●
●●●
●●
●●
●●
●
●●
●
●
●
●
●
●●●
● ●
●
●●
●●●●●●●●●●●
●●
●
●
●●●●●
●
●
●
●
●●●●
●●
●
●
●●●●
●
●
●●
●
●●●●●
●●
●●
●
●
●● ●
●
●●
●
●●●●
●
●
●
●●●
●
●
●●●●
●
●●
●●●
●
●
●
●
●
●●●
●●
●
● ●●●
●
●●●●
●
●●●●●
●●
●
●●●●
●
●
●
●
●
●●
●
●
●
●
●●●
●●
●●
●
●●●
●
●
●●●
●
●
● ●●●●
●
●●●
●●●● ●
●
●
●
●
●
●
●
●
●●
●●
●●●●
●●
●●●●
●
●
●
●
●
●
●
● ●●●●
●
●
●
●
●● ●
●●●
●●●
● ●
●●
●●
●●●
●●
●
●
●
●
●●●
●
●●
●
●
●
●●●
●●●
●
●
●●
●
●
●
●
●●
●
●
● ●
● ●
●●
●●● ●●
●●
●
●●●
●
●
●
●●
●
●
●
●
●
●
●
●
● ●
●●●●● ●
●
●
●●
●●●
●●
●
●
● ●● ●●●●
●●
●● ●●
●●●
●●
●●●
●●
●●
●●
●●●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●●●
●
●●●
●●
●●●
●●
●
●●●
●●
●●
●
●
●
●●●
●●
●
●●
●●
●
●●
●
●●●●
●
●
●●
●
●
●
●
●
●●●●●
●●●
●
●●●
●
●
●
●
●●
●●●
●
●●
●
●●
● ●●●●●
●
●
●
●●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
Genotype 9Genotype 12Genotype 15Genotype 20
Λk(x) = exp{βk + S0(x) + Sk(x)} : k = 1, . . . ,m
S0(x) not identifiable:
pk(x) = {Λk(x)}/{∑m
j=1 Λj(x)} = exp[−∑
j6=k{βj + Sj(x)}]
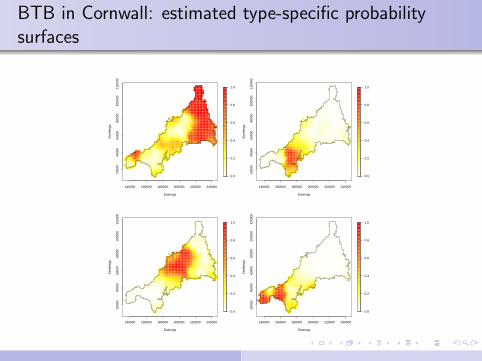
BTB in Cornwall: estimated type-specific probabilitysurfaces
140000 160000 180000 200000 220000 240000
2000
040
000
6000
080
000
1000
0012
0000
Eastings
Nor
thin
gs
0.0
0.2
0.4
0.6
0.8
1.0
140000 160000 180000 200000 220000 240000
2000
040
000
6000
080
000
1000
0012
0000
Eastings
Nor
thin
gs
0.0
0.2
0.4
0.6
0.8
1.0
140000 160000 180000 200000 220000 240000
2000
040
000
6000
080
000
1000
0012
0000
Eastings
Nor
thin
gs
0.0
0.2
0.4
0.6
0.8
1.0
140000 160000 180000 200000 220000 240000
2000
040
000
6000
080
000
1000
0012
0000
Eastings
Nor
thin
gs
0.0
0.2
0.4
0.6
0.8
1.0

BTB in Cornwall: areas of type-specific (0.8+) dominance
P(type k dominates)> 0.6
Dominant type defined as p_k>0.8
type 1type 2type 3type 4
P(type k dominates)> 0.7
P(type k dominates)> 0.8 P(type k dominates)> 0.9
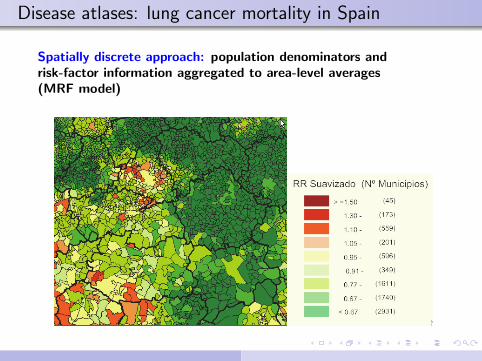
Disease atlases: lung cancer mortality in Spain
Spatially discrete approach: population denominators andrisk-factor information aggregated to area-level averages(MRF model)

Disease atlases: lung cancer mortality in Spain
Spatially continuous approach: population denominators andrisk-factor information in principle at point level (LGCP model)
Λ(x) = d(x) exp{z(x)′β + S(x)}
0.6
0.8
1.0
1.2
1.4
0.0
0.2
0.4
0.6
0.8
1.0
Predicted risk surface P(relative risk > 1.1)

Building spatio-temporal dependence
Separable
ρ(u, v) = ρS(u;α)ρT(v;β)
Non-separable empirical
ρ(u, v) = ρS(u;α;β)ρT(v){1 + f(u, v; θ)}
Non-separable mechanistic
S(x, t) = limδ→0
{∫hδ(u)S(x− u, t− δ)du + Zδ(x, t)
}

In conclusion
1 Statistical modelling should be driven by the underlyingscientific problem, rather than by the format of available data
2 Most (but not all) natural phenomena are spatially continuous
3 Surprisingly many of the problems to which spatial methodscan make a useful contribution reduce to an application ofBayes’ Theorem
[S,D] = [S][D|S]⇒ [S|D]
4 Modelling an unobserved stochastic process and assigning aprior distribution to an unknown parameter are mathematicallyequivalent but scientifically different activities
5 Modelling as a route to empirical prediction and modelling asa route to understanding a physical/biological mechanismdemand different approaches

Acknowledgements
CHICAS, Lancaster University : Paula Moraga, Barry Rowlingson,Ben Taylor
MRC: Methodology Research Grant G0902153
Diggle, P.J., Moraga, P., Rowlingson, B. and Taylor, B. (2013).Spatial and spatio-temporal log-Gaussian Cox processes: extendingthe geostatistical paradigm. Statistical Science, 28, 542–563.





























