Embed Size (px)
Citation preview

SMART PROTECTION SYSTEM FOR
FUTURE POWER SYSTEM DISTRIBUTION
NETWORKS WITH INCREASED
DISTRIBUTED ENERGY RESOURCES
Thesis
Moses Kavi
Submitted in fulfilment of the requirements for the degree of
Doctor of Philosophy
School of Electrical and Computer Science
Faculty of Science and Engineering
Queensland University of Technology
2019

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources i
Keywords
Adaptive Overcurrent Protection
Adaptive Radial Distribution Feeder Protection
Arc-Fault Detection
DC Arc-Fault Detection
DC – Offset Suppression
Future Electricity Distribution Network
High impedance Fault Detection
High impedance Fault Feature Extraction
Intelligent Electronic Devices
Inverse-Time Overcurrent Relaying
Mathematical Morphology
Morphological Filter
Overcurrent Protection
Photovoltaic System Protection
Smart Power System Protection
Weighted Structuring Element

iiSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
Abstract
Existing distribution feeders and their integrated protection systems are not
designed for high penetration of renewable energy (RE) based distributed energy
resources (DERs). The overcurrent protection systems are designed considering the
passive, unidirectional current flow. However, integration of the RE based DERs
such as PV systems through power electronic inverter interfaces fundamentally
changes the distribution network from passive to active network with bidirectional
current flow. The increased use of inverter interfaced RE based DERs and loads will
result in increased harmonic injection affecting power quality. Moreover, increased
penetration of RE based DERs will reduce the level of fault current magnitude from
the feeder substation source. This will adversely affect the feeder protection system
to provide effective protection as the fault current could fall below the overcurrent
threshold.
Faults in power systems (both in AC and DC system) are inevitable and will
occur at one time or another. Certain fault types, such as high impedance faults (HIF)
in AC systems generate low fault current magnitude as opposed to high fault current
magnitude from common short circuit faults which renders the feeder overcurrent
(OC) protection mechanism ineffective in HIF detection. This type of faults must be
detected and isolated as they can cause fire hazards and increase the risk of
electrocution. The inherent difficulty in HIF detection using OC protection scheme in
medium- (MV) to low voltage (LV) where HIFs are a common occurrence can be
aggravated by penetration of RE based DERs. HIF detection and classification based
on feature extraction rather than simply using current magnitude as a metric for HIF
detection will fail. This is due to low fault current magnitude from HIFs and
moreover, increased penetration of RE based DERs that reduces the fault current
magnitude.
Short circuit faults on the other hand result in large fault current having
potential to cause severe damage to power system apparatus and switchgear as well
as causing instability to the unaffected portion of the power system, thus must be
speedily detected and isolated. Short-circuit fault conditions generate transients in
fault current with an exponentially decaying DC-offset. The DC-offset distorts the

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources iii
fault signal waveform and may compromise the integrity of the relay algorithms such
as those based on fast Fourier transform (FFT) and wavelet transform (WT) thereby
resulting in computational delays in the detection of the fault condition. As the
accuracy and speed of convergence of conventional FFT and WT relies on the
periodicity of the fault current and voltage, their effectiveness under DC-offset and
HIFs are limited. Moreover, most DC-offset suppression techniques utilise parameter
estimation, and can add additional computational delay.
Fault protection systems in DC distribution are at their infancy as compared to
the fault protection systems in AC distribution. Faults in DC systems including DC
side of PV system exhibit characteristics quite different from AC system generally
because of different voltage (V) and current (I) characteristics in DC systems. DC
systems generally suffer from short circuit as well as open circuit faults resulting
from mechanical separation of conductors, and in most cases resulting in sustained
arcing. An overcurrent protection strategy using current magnitude as a threshold
metric is applied for all types of faults in the DC power systems including PV
systems. However, not all fault conditions on the DC system can be adequately
protected using such a strategy. One such fault condition is the DC arc-fault
occurring on the DC systems including the PV system. DC arc-fault can either be a
parallel fault (a short-circuit fault) or a series fault (an open-circuit fault). In PV
systems, the detection mechanism relies on backfed current to detect theses faults.
The nature of the faults, especially the series fault contravenes the logic in its
detection using current as the threshold metric. The difficulty in DC arc-fault
detection is compounded in PV systems, particularly at low irradiance which also
includes night to day transition and partial shading. The fast action of the maximum
power point tracking (MPPT) algorithm to put the system at different MPP operation
also imposes additional difficulties in the task of developing accurate reliable DC
arc-fault detection techniques.
In this thesis, a fault detection and diagnostic tool call the decomposed open-
closed alternating sequence (DOCAS) morphological fault detector (MFD) has been
proposed for application in fault detection in both AC and DC systems. The DOCAS
algorithm is a multistage morphological filter constructed from two nonlinear
Mathematical Morphological (MM) filters called the Morphological Median Filter
(MMF) and the Alternating Sequential Filters (ASF). The MM based technique
analyses the topography of the input signal waveforms by means of a probing signal

ivSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
called the structuring element (SE) in complete time domain. MM has the ability to
detect seemingly insignificant changes in the topography of the signal waveform
being investigated. The DOCAS algorithm uses a decomposed weighted SE to
enhance its performance in fault detection. The designed structure of DOCAS
algorithm allows it to be seamlessly applied in fault detection in both AC and DC
systems without any structural change. The characteristics of the MM technique
make the DOCAS algorithm convenient for the detection and classification of HIFs
as well as DC Arc-Faults in PV systems.
The performance of the DOCAS algorithm has been tested in radial
distribution feeder with PV based RE sources connected as DERs for short circuit
faults studies. From these studies, a strategy for adaptive radial distribution feeder
OC protection with built-in DC offset suppression capability is proposed. The
DOCAS algorithm’s capabilities in HIF detection and classification based on feature
extraction has been tested on various contact surfaces using the IEEE 13 bus test
system. The test results showed that DOCAS is capable of extracting successfully the
two target HIF features including randomness and arc extinction and re-ignition
characteristics. A strategy for HIF detection based on the extraction of the two target
features is proposed. The DOCAS algorithm was tested in a radial distribution feeder
with PV based RE sources as DERs for DC arc-fault detection on the PV side. The
performance of the algorithm has been remarkable with all cases of DC arc-fault
detected under all simulated conditions including low irradiance and changing
maximum power point (MPP).

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources v
Table of Contents
Keywords .................................................................................................................................. i
Abstract .................................................................................................................................... ii
Table of Contents ......................................................................................................................v
List of Figures ........................................................................................................................ vii
List of Tables ......................................................................................................................... xii
List of Abbreviations ............................................................................................................ xiii
Statement of Original Authorship ...........................................................................................xv
Acknowledgements ............................................................................................................... xvi
Publications .......................................................................................................................... xvii
Chapter 1: Introduction ...................................................................................... 1
1.1 Overview of Power System Protection ...........................................................................2
1.2 Conventional Distribution Network ...............................................................................5
1.3 Problem Statement ........................................................................................................11
1.4 Research Aims ..............................................................................................................13
1.5 Research Questions .......................................................................................................14
1.6 Research Contributions .................................................................................................15
1.7 Significance of the Research in Bushfires and Wildfires Prevention ...........................16
1.8 Thesis Outline ...............................................................................................................18
Chapter 2: Literature Review ........................................................................... 21
2.1 Introduction ..................................................................................................................21
2.2 Radial Distribution Feeder OverCurrent Protection .....................................................22
2.3 High Impedance Faults (HIF) Detection and Classification .................................................34
2.4 DC Arc-Fault Detection in Photovoltaic Systems ........................................................41
2.5 Summary and Implications ...........................................................................................49
Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm . 54
3.1 Introduction ..................................................................................................................54
3.2 Research Methodology Utilizing the MM Technique ..................................................54
3.3 Background of MM Based Techniques ........................................................................55
3.4 design of the morphological algorithm for power system fault detection ....................63
3.5 Attributes of the DOCAS Algorithm ............................................................................71
3.6 Conclusion ....................................................................................................................82
Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with
RE Based DERs ................................................................................. 84
4.1 Introduction ..................................................................................................................84

viSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
4.2 Thevenin Equivalent Parameter Estimation .................................................. 85
4.3 Effect of PV System Penetration on Feeder Substation Fault Current Level .............. 88
4.4 Effect of Fault Location on Feeder Substation Fault Current Level ............................ 91
4.5 DOCAS Algorithm in Adaptive Overcurrent Protection of Radial Distribution Feeder
with PV Penetration ..................................................................................................... 94
4.6 Application of MFD Output in Adaptive Radial Distribution Feeder OC Protection 102
4.7 Simulations and Discussion ....................................................................................... 104
4.8 Inverse-Time Over Current Relaying Using MFD Output Signal ............................. 122
4.9 Conclusion ................................................................................................................. 126
Chapter 5: HIF Detection and Classification in Distribution Feeders ............................. 129
5.1 introduction ................................................................................................................ 129
5.2 Proposed Method for HIF detection and Classification ................................................................ 130
5.3 Application of the MFD Output in Detection and Classification of HIF ................... 132
5.4 Simulations and Discussions ...................................................................................... 136
5.5 Challenges in HIF Detection in the Presence of Increasing RE based DER in Radial
DistrIbution Networks ................................................................................................ 156
5.6 Conclusion ................................................................................................................. 164
Chapter 6: DC Arc-Fault Detection in PV Systems ...................................... 167
6.1 Introduction ................................................................................................................ 167
6.2 The Proposed DC Arc-Fault Detection Technique .................................................... 167
6.3 Simulations and Discussions ...................................................................................... 169
6.4 Conclusion ................................................................................................................. 183
Chapter 7: Conclusions and Future Directions ............................................. 185
7.1 Summary of Conclusions ........................................................................................... 185
7.2 Future Directions. ....................................................................................................... 188
Bibliography ........................................................................................................... 205

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources vii
List of Figures
Figure 1.1: Typical connection of protective devices .................................................. 3
Figure 1.2: Functional character of the protective devices .......................................... 4
Figure 1.3: Typical structure of the conventional power system. ................................ 5
Figure 1.4: Radial Distribution Feeder ........................................................................ 6
Figure 1.5: Radial distribution feeder with PV system DERs ................................... 11
Figure 2.1: A typical feeder overcurrent protection scheme ...................................... 26
Figure 2.2: Functional blocks of a Time Overcurrent Relay ..................................... 27
Figure 2.3: Relay states for power system fault detection ......................................... 28
Figure 2.4: Standard inverse-time overcurrent relay characteristic curves at
TDS =1 .................................................................................................... 30
Figure 2.5: The first Emanuel HIF arc model ............................................................ 39
Figure 2.6: Modified Emanuel HIF arc model ........................................................... 40
Figure 2.7: TACS HIF arc model ............................................................................... 40
Figure 2.8: A typical PV system configuration with MPPT ...................................... 42
Figure 2.9: Series and parallel connection of PV modules in typical PV array ........ 44
Figure 3.1: Physical effect of (a) dilation and (b) erosion ......................................... 60
Figure 3.2: Physical effect of (a) opening and (b) closing transforms ...................... 61
Figure 3.3: Eccentrically decreasing convex structuring element. ............................ 66
Figure 3.4: DOCAS Response at the MMF stages (a) Simple AC input signal,
(b) MMF average output and (c) Difference fault signal, ∆f .................. 72
Figure 3.5: Fault detection windows of the DOCAS MFD output signal .................. 74
Figure 3.6: DOCAS response to SLG fault, (a) Fault current waveforms, SLG
fault on phase A, (b)-(d) corresponding MFD Outputs for each
phase. ....................................................................................................... 77
Figure 3.7: DOCAS response to SLG fault (a) Fault voltage waveforms for
SLG fault on phase A, (b)-(d) corresponding MFD outputs for each
phase. ....................................................................................................... 77
Figure 3.8: The MFD tall edge spikes for current, (a) MFDTall (1) and (b)
MFDTall (2) The MFD tall edge spikes for current, (a) MFDTall (1)
and (b) MFDTall (2) .................................................................................. 77
Figure 3.9: The MFD tall edge spikes for voltage, (a) MFDvTall (1) and (b)
MFDvTall (2) ............................................................................................. 78
Figure 3.10: DOCAS output for HIF arc extinction and re-ignition feature (a),
voltage signal and current signals, (b) fault voltage and HIF
current, and (c) MFDv output showing target MFDArc spikes .............. 80

viiiSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
Figure 3.11: DOCAS response to DC arc-fault in PV systems, (a) DC arc-fault
voltage, (b) Average MMF output, (c) diff DC fault voltage, ΔV
and (c) MFD output. ............................................................................. 82
Figure 3.12: DOCAS response to DC arc-fault in PV systems, (a) DC arc-fault
current, (b) Average MMF output, (c) diff DC fault current, ΔI
and (c) MFD output. ............................................................................. 82
Figure 4.1: A typical radial distribution feeder with PV penetration ......................... 85
Figure 4.2: PV system sequence networks ................................................................ 87
Figure 4.3: Per phase circuit diagram of the typical radial feeder system with
PV ............................................................................................................ 90
Figure 4.4: Per phase circuit diagram categorising PV sources into downstream
and upstream sources with respect to point of fault. ............................... 94
Figure 4.5: The OC fault detection and diagnostic scheme incorporating the
DOCAS algorithm. .................................................................................. 95
Figure 4.6: Flowchart showing the OC fault detection process ............................... 104
Figure 4.7: Test feeder for modelled in Simulink for simulations ........................... 105
Figure 4.8: Characteristic curves for the PV strings at STC, (a) I-V and (b) P-V
curves ..................................................................................................... 107
Figure 4.9: Circuit topology of a DC-DC boost converter [171] ............................. 107
Figure 4.10: Switching waveforms for the voltage and current in the DC-DC
boost converter .................................................................................... 108
Figure 4.11: Characteristic curves for the PV strings at STC, (a) I-V and (b) P-
V curves with increased temperatures ................................................ 109
Figure 4.12: Circuit topology of two-level voltage source converter with a
phase output voltage waveform [179] ................................................. 112
Figure 4.13: Fault current signals with DC-offset, (a) The fault current signal
and average MMF output (b) Difference fault current signal. ............ 113
Figure 4.14: Power spectral density plots for (a) fault current (b) average MMF
output and (c) difference fault current, ∆i. .......................................... 113
Figure 4.15: Difference fault current signal, ∆i and the EWMA filter output ......... 114
Figure 4.16: Power spectral density of the EWMA filter output ............................. 114
Figure 4.17: RLSE filter signals (a)RLSE filter input signal, (b) RLSE filter
output signal ........................................................................................ 114
Figure 4.18: RLSE filter magnitude response for SLG fault at fault location 2 at
0%, 28% and 33% PV penetration ...................................................... 117
Figure 4.19: MFD output corresponding to fault current magnitude for SLG
fault at fault location 2 at 0%, 28% and 33% PV penetration. ........... 117
Figure 4.20: MFD output corresponding to fault current magnitude for SLG
fault at fault location 2 at 0%, 28% and 33%, 44% and 50% PV
penetration levels. ............................................................................... 119

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources ix
Figure 4.21: RLSE filter magnitude response for SLG fault at fault locations 1,
2 and 3 at 28% .................................................................................... 120
Figure 4.22: MFD output corresponding to fault current magnitude for SLG
fault at fault locations 1,2 and 3 at 28% PV penetration. ................... 120
Figure 4.23: MFD output corresponding to fault current magnitude for SLG
fault at fault location 2 at (a) 0% and 28% PV penetration. ............... 122
Figure 4.24: Standard moderately inverse ITOC relay curve with M values in
Table 4.10 ........................................................................................... 124
Figure 4.25: ITOC relay curves at various TDS values ........................................... 126
Figure 5.1: Structure of the Morphological HIF detector ........................................ 130
Figure 5.2: MFD fault windows partitions for HIF detection .................................. 131
Figure 5.3: Flowchart of Proposed HIF Detection and Declaration ........................ 136
Figure 5.4: IEEE 13 bus test system ........................................................................ 137
Figure 5.5: Emanuel Arc model in HIF simulation.................................................. 138
Figure 5.6: V-I characteristic curves of the simulated contact surfaces .................. 139
Figure 5.7: MFDvWindow spikes for SLG fault ......................................................... 141
Figure 5.8: MFDvWindow spikes for capacitor switching .......................................... 141
Figure 5.9: MFDvWindow spikes for induction motor switching ............................... 141
Figure 5.10: MFDvWindow spikes for step load increase ........................................... 141
Figure 5.11: Signals for HIF at 602 on conc. surface (a) fault voltage and HIF
current, and (b)MFDv output .............................................................. 146
Figure 5.12: MFDvTall edge spikes for HIF at 602 on conc. surface (a) MFDvTall
(1), (b) MFDvTall(1) pu increase,(c)MFDvTall(2) and (d)
MFDvTall(2) pu increase. ..................................................................... 146
Figure 5.13: MFDvShort edge spikes for HIF at 602 on conc. surface (a)
MFDvShort (1), (b) MFDvShort(1) pu increase,(c)MFDvShort(2) and
(d) MFDvShort(2) pu increase. .............................................................. 147
Figure 5.14: Random MFDvWindow spikes for HIF at 602 on conc. surface ............. 147
Figure 5.15: MFDvArc spikes for HIF at 602 on conc. surface, (a) MFDvArc
spikes and ............................................................................................ 148
Figure 5.16: MFDvTall edge spikes for HIF at 605 on dry grass (a) MFDvTall (1),
(b) MFDvTall(1) pu increase,(c)MFDvTall(2) and (d) MFDvTall(2) pu
increase. .............................................................................................. 152
Figure 5.17: MFDvShort edge spikes for HIF at 605 on dry grass (a) MFDvShort
(1), (b) MFDvShort (1) pu increase, (c)MFDvShort(2) and (d)
MFDvShort(2) pu increase.. ................................................................... 152
Figure 5.18: Random MFDvWindow spikes for HIF at 605 on dry grass .................... 152
Figure 5.19: MFDvArc spikes for HIF at 605 on dry grass, (a) MFDvArc spikes
and ....................................................................................................... 153

xSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
Figure 5.20: Signals for HIF at 602 on conc. surface (a) fault voltage and HIF
current, and (b) MFDv output with noise. ........................................... 154
Figure 5.21: MFDvTall edge spikes for HIF at 602 on conc. surface (a) MFDvTall
(1), (b) MFDvTall(1) pu increase,(c)MFDvTall(2) and (d)
MFDvTall(2) pu increase with noise. .................................................... 155
Figure 5.22: MFDvShort edge spikes for HIF at 602 on conc. surface (a)
MFDvShort (1), (b) MFDvShort(1) pu increase,(c)MFDvShort(2) and
(d) MFDvShort(2) pu increase with noise. ............................................. 155
Figure 5.23: Random MFDvWindow spikes for HIF at 602 on conc. surface with
noise. ................................................................................................... 155
Figure 5.24: MFDvArc spikes for HIF at 602 on conc. surface, (a) MFDvArc
spikes and ............................................................................................ 156
Figure 5.25: Radial feeder with PV .......................................................................... 157
Figure 5.26: DOCAS MFDi outputs for HIF at XF1 closer to the feeder
substation (a) MFDi without PV, (b) MFDi with PV .......................... 158
Figure 5.27: DOCAS MFDi outputs for HIF at XF2 further from the feeder
substation (a) MFDi without PV, (b) MFDi with PV .......................... 158
Figure 5.28: HIF signals for HIF at XF2 on dry grass (a) fault currents for with
and without PV, (b) MFDi outputs for with and without PV .............. 161
Figure 5.29: MFDiTall spikes for HIF at XF2 on dry grass (a) MFDiTall (1) spikes
for with and without PV, (b) MFDiTall (2) spikes for with and
without PV .......................................................................................... 162
Figure 5.30: MFDiTall spikes and MFDiTall pu increases for HIF on dry grass at
XF2 with PV (a) MFDiTall (1) spikes, (b) MFDiTall (1) pu increase,
(c) MFDiTall (2) spikes, (c) MFDiTall (2) pu increase ........................... 162
Figure 5.31: HIF signals for HIF at XF2 on dry grass (a) fault voltage with PV,
(b) MFDv output .................................................................................. 162
Figure 5.32: MFDvTall spikes and MFDvTall pu increases for HIF on dry grass at
XF2 with PV (a) MFDvTall (1) spikes, (b) MFDvTall (1) pu increase,
(c) MFDvTall (2) spikes, (c) MFDvTall (2) pu increase .......................... 163
Figure 5.33: MFDvShort spikes and MFDvShort pu increases for HIF on dry grass
at XF2 with PV (a) MFDvShort (1) spikes, (b) MFDvShort (1) pu
increase, (c) MFDvShort (2) spikes, (c) MFDvShort (2) pu increase ........ 163
Figure 5.34: Window, MFDvWindow spikes ................................................................ 163
Figure 5.35: HIF arc extinction and re-ignition, MFDvArc spikes ............................ 164
Figure 6.1: Block diagram of the DC Arc-Fault detection system ........................... 168
Figure 6.2: Radial distribution feeder with PV penetration used in the
simulation study .................................................................................... 169
Figure 6.3: PV array configuration in the simulation system .................................. 170
Figure 6.4: A typical PV system configuration array configuration ....................... 170
Figure 6.5: Characteristic curves for the PV String configuration (a) I-V curve,
and (b)P-V curve ................................................................................... 171

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources xi
Figure 6.6: Layout of the PV modules in the PV strings for fault simulations. ....... 171
Figure 6.7: Current signal measured at DC bus with associated signals for DC
arc-fault FP1 ........................................................................................... 176
Figure 6.8: Voltage signal measured at DC bus with associated signals for DC
arc-fault FP1 ........................................................................................... 176
Figure 6.9: MFD outputs for PV string currents for fault DC arc-fault FP1 ............ 176
Figure 6.10: Current signal measured at DC bus and MFD out for DC arc-fault
FP7 ....................................................................................................... 177
Figure 6.11: Voltage signal measured at DC bus and MFD out for DC arc-fault
FP7 ....................................................................................................... 177
Figure 6.12: Current signals measured at PV strings for DC arc-fault FP7 ............. 178
Figure 6.13: MFD outputs for PV string currents for DC arc-fault FP7 .................. 178
Figure 6.14: Current signal measured at DC bus and MFD out for DC arc-fault
Fs2 ....................................................................................................... 179
Figure 6.15: Voltage signal measured at DC bus and MFD out for DC arc-fault
Fs2 ....................................................................................................... 179
Figure 6.16: Current signals measured at PV strings for DC arc-fault Fs2 .............. 179
Figure 6.17: MFD outputs for PV string currents for DC arc-fault FP2 .................. 180
Figure 6.18: DC arc-fault current and MFD output high to low transition after
fault ..................................................................................................... 181
Figure 6.19: DC arc-fault voltage and MFD output high to low transition after
fault ..................................................................................................... 181
Figure 6.20: DC arc-fault current and MFD output high to low transition before
fault ..................................................................................................... 182
Figure 6.21: DC arc-fault voltage and MFD output high to low transition
before fault .......................................................................................... 182
Figure 6.22: DC arc-fault current and MFD output high to low transition with
fault ..................................................................................................... 183
Figure 6.23: DC arc-fault voltage and MFD output high to low transition with
fault ..................................................................................................... 183
Figure 7.1: A typical DC power distribution system ............................................... 199

xiiSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
List of Tables
Table 2.1: CTS of a non directional ITOC relay ........................................................ 30
Table 2.2: Common V-I relationships in DC Arc models.......................................... 48
Table 4.1: Prefault current MFD values ................................................................... 115
Table 4.2: Fault current MFD values at fault locations along feeder length. ........... 115
Table 4.3: Increase in fault current magnitude at different fault location ................ 116
Table 4.4: MFD values fault currents for faults at Fault location 2 ......................... 116
Table 4.5: Fault current increase at various PV levels for faults at location 2 ......... 117
Table 4.6: Increase fault current magnitude at different PV level for fault a
location 2 ............................................................................................... 118
Table 4.7: Fault level increase at different fault location at 28% PV penetration .. 120
Table 4.8: Increase in fault current magnitude at different fault distance 28%
PV .......................................................................................................... 122
Table 4.9: Per unit increases (M) in fault current magnitude at different PV
levels at FP2 ........................................................................................... 125
Table 4.10: Per unit increases (M) in fault current magnitude at different fault
locations ................................................................................................. 125
Table 4.11: Trip times at different PV levels ........................................................... 125
Table 4.12: Trip times at different fault distance ..................................................... 125
Table 5.1: Contact surfaces in HIF simulations ....................................................... 138
Table 5.2: Time duration for existence of the MFD spikes due to non HIF
transients ................................................................................................ 140
Table 5.3: HIF Detection and Time of Appearance of MFDv spikes for HIF
Feature Extraction ................................................................................. 145
Table 5.4: Prefault MFDv Values ............................................................................. 150
Table 5.5: Revised MFDv Threshold limits at different fault locations ................... 151
Table 5.6: Threshold Values at Different SNR Values ............................................ 153
Table 5.7: MFDiTall edge values for HIF at location XF2 .......................................... 160
Table 6.1: Prefault current measurements for PV strings at different irradiances ... 173
Table 6.2: Load current under simulated fault conditions at different
irradiances ............................................................................................. 174
Table 6.3: Calculated backfed current for the simulated fault conditions ............... 175
Table 7.1: Summary of OC Protection Schemes for Distribution Networks with
Increased DER Penetration ................................................................... 194
Table 7.2: Summary of Protective Devices used DC Distribution Systems ............ 200

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources xiii
List of Abbreviations
ACR Automatic Circuit Recloser
ASF Alternating Sequence Filter
ASF Alternating Sequential Filter
CB Circuit Breaker
COASF Close-open Alternating Sequence Filter
CT Current Transformer
CTS Current Tap Setting
DER Distributed Energy Resource
DFT Discrete Fourier Transform
DMMF Decomposed Morphological Median Filter
DOCAS Decomposed Open Close Alternating Sequence
DWT Discrete Wavelet Transform
ESS Energy Storage System
FFT Fast Fourier Transform
GFPD Ground Fault Protection Device
HIF High Impedance Fault
IEEE Institute of Electronics and Electrical Engineers
IMPP Current at Maximum Power Point
ITOC Inverse Time Overcurrent
MFD Morphological Fault Detector
MFDi Morphological Fault Detector output for current signal input
MFDv Morphological Fault Detector output for voltage signal input
MM Mathematical Morphology
MMF Mathematical Median Filter
MMF Morphological Median Filter
MPP Maximum Power Point
MPPT Maximum Power Point Tracking
OC Overcurrent
OCASF Open-close Alternating Sequence Filter
OCPD Overcurrent Protection Device
PCC Point of Common Coupling

xivSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
PV Photovoltaic
RE Renewable Energy
RLSE Recursive Least Square Error
RMPP Resistance at Maximum Power Point
RMS Root Mean Square
SE Structuring Element
SS Substation
STC Standard Test Condition
TDS Time Dial Setting
TMS Time Multiplier Setting
VMPP Voltage at maximum Power Point
VT Voltage Transformer
WT Wavelet Transform

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources xv
Statement of Original Authorship
The work contained in this thesis has not been previously submitted to meet
requirements for an award at this or any other higher education institution. To the
best of my knowledge and belief, the thesis contains no material previously
published or written by another person except where due reference is made.
Signature: QUT Verified Signature
Date:

xviSmart Protection System for Future power System Distribution Networks with Increased Distributed Energy Resources
Acknowledgements
It gives me pleasure in taking this opportunity to express my sincerest
appreciation and gratitude to those who have generously contributed and helped me
throughout my PhD research that is presented in this thesis.
In Particular, I would like to express my heartfelt gratitude to my principal
supervisor, Dr Yateendra Mishra who has provided expert guidance and spent
countless hours in very worthwhile discussions and encouragements to get me
through some challenging times. I also acknowledge all the time he spent in
providing very good reviews of draft thesis, journal and conference papers which
have eventually been published.
I also extend my sincere gratitude to my associate supervisor, Professor
Mahinda Vilathgamuwa for the time in providing good feedback and corrections to
my thesis.
I would also like to gratefully acknowledge the support of Queensland
University of Technology for the tuition scholarship and providing the facilities and
resources during my PhD study. I also extend my sincere gratitude to the Papua New
Guinea University of Technology for the financial support in meeting all my living
expenses while I was pursuing my PhD studies.
Last but certainly not the least; I would like to specially thank my wife and my
children for having the patience to put up with my long absence while I pursued my
PhD research. I would like to also thank God, my mother and my father for bringing
me into this world.

Smart Protection System for Future power System Distribution Networks with Increased Distributed Energy
Resources xvii
Publications
Peer Reviewed Journals (Manuscripts Published /Accepted for Publication)
1) M. Kavi, Y. Mishra, and M. Vilathgamuwa, “Morphological Fault Detector for
Adaptive Overcurrent Protection in Distribution Networks with Increasing
Photovoltaic Penetration, “IEEE Transaction on Sustainable Energy”,Vol.9,
No.3, pp. 1021-1029, Jul., 2018. DOI: 10.1109/TSTE.2017.2759158
Contribute to Chapter 4 of the Thesis
2) M. Kavi, Y. Mishra, and M. Vilathgamuwa, “High Impedance Fault Detection
and Classification in Power System Distribution Networks Using Morphological
Fault Detector Algorithm, “IET Generation, Transmission and Distribution”,
pp.3699-3710, May 2018. DOI: 10.1049/iet-gtd.2017.163
Contribute to Chapter 5 of the Thesis
Peer Reviewed Conferences (Manuscripts Published /Under Review)
3) M. Kavi, Y. Mishra, and D. Vilathgamuwa, "Detection and identification of high
impedance faults in single wire earth return distribution networks," in
Proceedings of Australasian Universities Power Engineering Conference
(AUPEC), 2016, pp. 1-6, Nov. 2016. DOI: 10.1109/AUPEC.2016.7749341
4) M. Kavi, Y. Mishra, and M. Vilathgamuwa, "Challenges in high impedance fault
detection due to increasing penetration of photovoltaics in radial distribution
feeder," in Proceedings of IEEE Power & Energy Society General Meeting (PES
GM), 2017, pp. 1-5, 2017. DOI: 10.1109/PESGM.2017.8274658
Contribute to Chapter 5 of the Thesis
5) M. Kavi, Y. Mishra and M. Vilathgamuwa, “DC Arc-Fault Detection in PV
System Using Multistage Morphological Fault Detection Algorithm”, IEEE Ind.
Electronics Society Conf. (IECON) 2018, Washington. DC, Oct 2018. (Accepted
15th August 2018).
Contribute to Chapter 6 of the Thesis


Chapter 1: Introduction 1
Chapter 1: Introduction
This chapter introduces the topic of the thesis and provides background
discussion related to the topic including general overview of distribution network
protection, its components and their functional attributes. The technical challenges
introduced due to the increased penetration of RE based DERs in distribution
network feeder protection are discussed. The discussions further highlight the
coexistence of AC and DC systems within the distribution network made possible by
the advances in power electronic converters and interfacing technology, and the need
to provide effective protection in both systems.
The current trend in the design and utilisation of modern distribution networks
includes diverse generating sources including renewable energy (RE) sources
directly connected to the distribution feeders as distributed energy resources (DERs).
The inclusion of RE based DERs changes the passive unidirectional power delivery
nature of the radial distribution networks to active networks with bidirectional
current flow. The conventional OC protection system in radial distribution feeder
relies on current magnitude as a threshold metric, thus it is imperative that sufficient
fault current magnitude above the predefined threshold limit during fault must exist
for this scheme to be effective. The direct interconnection of RE based DERs at the
distribution feeder contravenes this fundamental requirement as the DERs supply
power to distributed loads along the feeder length thereby reducing the current
supply emanating from the feeder substation. This can affect the coordination of the
protective devices in the feeder OC protection scheme hence compromising its
effectiveness in responding to fault conditions reliably.
Furthermore, other fault conditions such as high impedance faults (HIFs)
resulting from fallen conductors as well as energised conductors making unwanted
contacts with tree trunks and branches are quite common in medium (MV) and low
voltage (LV) distribution networks. Unlike OC faults, this category of faults
generates a low current magnitude rendering the feeder OC protection scheme
ineffective in detecting such faults. This inherent difficulty can be exacerbated by
increased levels of RE based DERs in the distribution feeders.

2 Chapter 1: Introduction
In recent times, the advances in power electronic converters and interfacing
technology has enabled the creation of DC subsystems within the AC distribution
networks to directly supply DC power to DC loads from DC sources such as
photovoltaic(PV) based RE sources or through AC-DC inverters from traditional AC
sources. This adds further challenges in designing protection systems for DC systems
as the protection mechanism in AC systems cannot be applied in DC systems.
These technical challenges introduced due to the increased penetration of RE
based DERs define the scope of the research problem. The aims and objectives of the
research, the research questions and the research contributions are also defined in this
chapter.
1.1 OVERVIEW OF POWER SYSTEM PROTECTION
The Power System Protection scheme is the design and interconnection of
specialized measurement, decision making and isolating devices whose function is
the fast detection and isolation of any abnormalities posing immediate threat to the
reliability, security and continuous operation of the power system. A power system
protection scheme must have the following designed attributes to meet the protection
system functional requirements [1]:
Speed: The protection system must operate rapidly to interrupt the fault to
minimise damage or possible system collapse. Intentional delay can be
introduced as part of the relaying strategy to coordinate between zones
of protection. The minimum time taken to isolate hazard is called the
clearing time.
Sensitivity: This ensures that fault (current/voltage) magnitude (however small)
should be detected by the protection system. The protection system
must be able to correctly discriminate between fault and normal
operating condition based on comparison with some predefined
inequality constraint or threshold quantity.
Selectivity: This is defined by the relaying or switching strategy where only the
portion of the network or equipment under fault is isolated. Relaying
strategy sectionalises the network into zones of protection whereby only
faulty equipment or network portion within a zone of protection are
isolated. Zones of protections are defined by proper grading of

Chapter 1: Introduction 3
protection threshold, time delay and/or operating characteristics of the
protective relaying devices.
Security: Security of the power distribution network operation means that the
protection system must be reliable. Moreover, robustness is also
anticipated as it would add to the notion of reliability of the protection
system. Reliability defines the expectation that the protection system
devices will correctly operate when expected to. Robustness suggests
that the devices can operate reliably under dynamic network condition.
The security of the protection system further is enhanced by having
backup protection. If a protection device in a zone fails to operate, then
backup protection is provided by devices in the neighbouring zones.
1.1.1 Basic Components of Protection Scheme and Their Functions
A typical power system protection scheme includes the following functional
devices; measurement devices, decision-making device and isolating device [2]. A
simple interconnection of these devices while not implying any protection scheme
implementation is shown in Figure 1.1. A protection system generally has three basic
elements such as 1) current transformers (CT) and voltage transformers (VT), 2)
Relays and 3) CB as illustrated where the CT and VT are the measurement devices.
The relay is the decision-making device that actuates the circuit breaker (CB) which
is the isolating device.
Figure 1.1: Typical connection of protective devices
The protection system continuously monitors the state of the power system by
taking measurements of quantity such as voltage (V´) and current (I´) via the
secondary windings of the VT and CT respectively. The voltage (V) and current (I)
signals are the primary quantities, other quantities, such as impedance, admittance

4 Chapter 1: Introduction
and power, etc., are secondary quantities can be computed from the primary
quantities if required to execute a decision. The functional attributes of the protection
components are graphically illustrated in Figure 1.2. The occurrence of any
abnormality or disturbance is detected by comparing the measured and/or computed
quantities against a preset threshold metric. The network is said to be in normal
(healthy) state and is allowed to continue operating if the measured quantities and/or
their derivatives are within the limit defined by the preset threshold metric. If the
value of the measured quantities and/or their derivatives violates the limit of the
threshold metric, the network is said to be in abnormal (unhealthy) state. The
protection system goes into state of alert to indicate abnormal network state, and the
decision logic element is activated to issue a trip command to take out the faulty
system apparatus or isolate the faulty section of the network and allow service to the
rest of the network.
The functional block diagram in Figure 1.2 shows that, the protection relay is
the key component in defining the functional attributes of the protection system. The
protection relay executes the decision to send appropriate trip signal to the associated
circuit breaker to isolate the unhealthy part of the network and allow service
continuity to the rest of network. The relay senses the existence or occurrence of any
abnormal condition, then in collaboration with the circuit breaker to isolate the
disturbances in a fast and reliable manner to minimise any harmful consequence to
the power system as well as human beings. Thus, to ensure the security, integrity and
reliability of a power system, it is highly imperative to have a fast and effective relay
operation that is sensitive and respond rapidly to hazardous condition to isolate any
faulted equipment or section of the network under any operating conditions and
allow the continuous operation of the healthy section of the network.
Figure 1.2: Functional character of the protective devices

Chapter 1: Introduction 5
1.2 CONVENTIONAL DISTRIBUTION NETWORK
The power system generally consists of Generation, Transmission and
Distribution subsystems as shown in Figure.1.3 with typical voltage levels either
stepped up and/or down by appropriate transformers. In the conventional power
system, the power is delivered to the users from the power generation plants at some
remote/isolated location through intricate network of step-up transformers,
transmission lines, step-down transformers at substations and distribution lines [3].
The power is delivered to the consumers who are connected to the power
system network through radial distribution feeders continuously and reliably. To
ensure reliability and security of operation of the power system for optimum
operation in power delivery under any operating conditions, there must exist
sensitive and fast responding protection system. Protection systems are integral parts
of the entire power delivery system. The conventional distribution networks operate
at medium voltage (MV) to low voltage (LV) and consist of radial distributions
feeders for consumer connectivity as tapped load along the feeder length [1]. The
feeders originating from the distribution substation have lateral branches through
which consumers are connected to by means of step down distribution transformers
that provide either one- or two- phase circuits.
Figure 1.3: Typical structure of the conventional power system.

6 Chapter 1: Introduction
Considering the system referred to in Figure 1.3, the distribution feeders exist
at the part of the distribution subsystem at 10-40 kV. The feeders are radial in nature
and provide means to distribute energy to the consumers as tapped loads through
distribution transformers. A typical example of a radial distribution feeder with step-
down transformers supplying power to the consumers as tapped loads is shown in
Figure 1.4. The Substation source represents the HV primary source in the
distribution substation which is stepped down to 10-40 kV. The consumers are
connected through distribution transformers at lower voltages of between 220-400 V.
Figure 1.4: Radial Distribution Feeder
1.2.1 Challenges in Modern Distribution Networks
The conventional radial power distribution network is constrained by some
major operational drawbacks such as low efficiency in power delivery. The power
generating plants are located at some distance, hundreds of kilometres away from the
consumers, and power is carried through the transmission and distribution lines that
span the entire distance. This requires upgrading aging power system infrastructure
and expansion of the transmission and distribution systems. Moreover, the long
distance increases the transmission loss resulting in low efficiency. Furthermore, the
primary energy sources in such centrally located power systems are fossil fuel based
such as coal and diesel. Such conventional energy sources are unsustainable and
environmentally destructive, contributing to greenhouse gas emission and increasing
global warming. The need to overcome the existing constrain compounded with ever
increasing demand for energy, and specialised characteristics of some loads such as
DC loads dictates, more so necessitates the need to transform the power supply
system [4], [5].
The transformation and/or reconfiguration of today’s power system are
intended to overcome the drawbacks of the conventional power system. In the

Chapter 1: Introduction 7
modern power system design, there are proposals to address the issues of low
efficiency and, high maintenance and operational costs by integrating small scale
power generating systems at the distribution network as DERs [6] coupled to radial
distribution feeders. Direct integration of DERs reduces the requirement for long
transmission lines, which reduces maintenance and operational costs, and improve
energy efficiency by reducing transmission losses and better management of
resources. While achieving improvements in cost reduction and energy efficiency, it
is envisaged that the transformed power system will meet the obligation for reduced
carbon emission. This requirement is inevitable and mandatory, thus must be
incorporated into the design and implementation of the modern power system as
international governments develop and adopt policies to reduce global warming.
Furthermore, with the advancement in power electronic technologies there are
increasing number of load types that require DC power supply. Therefore, to supply
both AC and DC load demands, the modern power system must be more flexible,
and configurable energy system [7]. This view has seen the proliferation in
production and deployment of RE based DERs and energy storage systems (ESSs)
[8] at the distribution network. Some RE technologies that have matured and widely
used include wind turbines [9], photovoltaic (PV) arrays [10] fuel cells and micro-
turbines [11] while ESSs include batteries [12], flywheels [13] and super capacitors
[14]. A power system that exhibits such characteristics with integration of PV system
at the distribution feeder level is depicted in Figure.1.5.
1.2.2 Integration of RE Based DERs
The ever-increasing demand for energy, and more so the need for clean,
sustainable environmentally friendly energy sources has seen the proliferation in the
development and deployment of renewable energy harvesting technologies such as
photovoltaic modules, wind generators, fuel cells, etc., to name a few. Moreover,
with the advancements in the development of power electronic converters and
interfacing technologies, the RE sources can now be easily integrated into medium
voltage (MV) or low voltage (LV) distribution networks as DERs. Figure.1.5 shows
the integration of PV based RE sources as DERs into the radial distribution feeder.
The integration of RE based DERs such as PV systems provides opportunity for
diversification of load types that can be supplied directly or indirectly by the DERs.
The RE based DERs such as PV systems can supply DC loads directly through a DC-

8 Chapter 1: Introduction
DC converter as well as supply AC loads through DC-AC converter. There is
increasing load diversification today due to advances in power electronic devices
where more and more loads today require DC power supply as opposed to the
traditional AC power supply. Thus, the development trend in modern power system
must consider, and be capable of supporting the integration of diverse and increasing
penetration of RE based DERs, energy storage, electric vehicles while meeting the
high power quality standard required by sensitive modern digital devices and loads
[15], [16].
1.2.3 Challenges in Distribution Network OC Protection System Design Due to
Increased Penetration of RE Based DERs.
The existing power system, more so the distribution subsystem and its
integrated protection mechanism were not designed for high penetration of DERs,
more so renewable energy resources. The existing distribution network/feeder
overcurrent protection system was designed considering the passive, unidirectional
current flow. However, integration of the RE based DERs fundamentally changes the
distribution network from passive to active network with bidirectional current flow
[17]. Moreover, increased deployment of power electronic converters and loads
increases harmonic injection thus increasing the level of voltage and current
distortion. Furthermore, high penetration of RE based DERs contribute large
component of the total fault current thus reducing the magnitude of the fault current
at the feeder substation. This will adversely affect the main feeder protection relay at
the feeder substation to provide effective protection as the fault current could fall
below the overcurrent threshold [18] ,[19]. Further challenge to distribution network
feeder protection is that increased penetration of the RE based DERs will decrease
the reach of the protective devices within a zone of protection for which it was
configured to operate [20].
Some researchers have proposed that the future distribution network will
incorporate DC buses to connect DC sources and loads [21]. To maintain optimum
system operation, the DC generation sources as well as associated components and
loads must be protected from harmful fault conditions. The AC feeder OC protection
system cannot be used as it is not designed for the DC system protection. Thus, a
separate DC protection system is necessary for protection of DC systems. The
existing DC fault protection scheme which is contingent on detecting sufficient fault

Chapter 1: Introduction 9
current magnitude, [22] cannot guarantee protection against all types of faults in DC
systems. For instance, the DC system OC protection will fail to operate in PV system
under low irradiance as the fault current magnitude would be insufficient to trigger
the OCPD and/or GFPD.
In designing protection systems for AC and DC networks, consideration for
adaptability is a key factor. The dynamics of both the AC and DC systems including
network topology change under different operating conditions with RE penetration
must be considered. In this thesis, the study is based on PV as DER; however, it is
assumed that the analysis, observations and conclusions, and the outcome of the
research will be applicable to all RE based DERs unless specified otherwise. Thus, to
maintain generality, the use of PV based DERs will be dropped, instead RE based
DERs is used.
1.2.4 Faults on AC Systems
The RE based DERs when connected to the distribution network as shown in
Figure.1.5 form an integral part of the AC system, and they receive power from and
contribute power to the feeder. Power distribution networks including distribution
feeders are not immune to faults. Faults such as single line-to-ground (SLG), line-to-
line (LL), three phase (3Ph) faults, etc., can occur at any point in the network. These
kinds of faults are low impedance (short circuit) faults which generally result in high
fault current. In distribution feeder protection, the overcurrent protection strategy is
used to arrest any fault. This scheme is quite simple, and its effectiveness is
contingent on accurate measurement of the fault current magnitude. The measured
fault current magnitude is tested against a preset threshold parameter. The threshold
parameter in the conventional OC protection scheme is designed for passive network
with unidirectional current flow. The main feeder protection relay is normally
located at the feeder substation, and sufficient fault current magnitude, above the
threshold value must be detected by the relay to guarantee reliable protection. With
the penetration of RE based DERs along the feeder, the network is no longer passive;
it becomes an active network with bidirectional current flow. Under any short-circuit
fault conditions, the DERs have the potential to contribute fault current resulting in
reduced fault current magnitude at the feeder substation falling below the OC
threshold. Factors that impact on the fault current magnitude at the feeder substation
include the level of RE based DER penetration and the distance to fault from the

10 Chapter 1: Introduction
substation and the type of fault. The network topology change influenced by the
intermittency of the RE sources is another parameter that impacts on the fault current
magnitude. Thus, for the feeder OC protection scheme to be effective, the threshold
parameter must be adaptive to all the changes introduced by the RE based DERs.
High Impedance Faults: The power system network not only suffers from low
impedance faults, but also other fault conditions resulting in low fault current
magnitudes known as high impedance faults (HIFs) are prevalent in medium voltage
(MV) and low voltage (LV) networks. Because of the inherent low fault current
magnitude from HIFs, the conventional OC protection will become ineffective under
such fault conditions. HIFs are very difficult to detect because of the low fault
current magnitude as well as their highly random and nonlinear characteristics which
most often involves arcing.
In the face of the changing landscape in the distribution network brought about
by the integration of the DERs, more specifically the RE based DERs, effective
protection system, considering all fault types must be considered.
1.2.5 Faults on DC Systems
In the DC systems, all DC sources and loads are connected through the DC
bus. Faults can occur anywhere on such a system as well. Common types of faults on
the DC network involve parallel and series faults. Parallel faults are typically short
circuit faults, where accidental bridging between two conductors or bridging between
positive conductor and ground occur. The risk of such fault occurring in the DC
system is increased by degradation of conductor insulation and other contaminants.
Series faults on the other hand are typically open circuit faults resulting from break
or mechanical detachment of conductor due to poor solder connection, rusting etc.
These faults, more specifically parallel faults can be classified as mismatch faults in
PV systems. Generally, for both fault categories, if the condition is conducive for
arcing to occur, then arc ignition will occur, the arc will be sustained. Under this
condition, the faults are classified as parallel DC arc-faults and series DC arc-faults.
The protection system in DC systems utilizes the same principle as in AC
distribution network feeder OC protection. The deployment of the DC bus protection
scheme depends on placement of over current protection device (OCPD), which
essentially is a fuse in series with the load and ground fault protection device
(GFPD) to interrupt the fault current [23]. Essentially, the scheme depends on

Chapter 1: Introduction 11
reliable detection of large fault current, above a predefined threshold to operate the
protection devices. The DC arc-faults, particularly those occurring in the DC bus of
the PV system as well as on the PV strings, including inside the PV cells and
modules are difficult to detect, especially under low irradiance. The longer the fault
exists; the optimal operational condition of the DC system is degraded. Moreover,
the persistent and sustained DC arc increases the risk of fire.
Figure 1.5: Radial distribution feeder with PV system DERs
1.3 PROBLEM STATEMENT
The challenges and issues in power system protection considering the changing
landscape in distribution network due to the integration of RE based DERs are
summarised here, and they constitute the problems that motivated this research.

12 Chapter 1: Introduction
1.3.1 Challenges in Overcurrent Protection in Distribution Network with
Increasing DER Penetration
The conventional distribution network feeder OC protection has been designed
for passive radial network with unidirectional current flow. The penetration of
the RE based DERs at the feeder affects the conventional feeder OC protection
as well as introduce challenges in the redesign and implementation of feeder
OC in the following way;
▪ Distribution network feeder is no longer passive; it is dynamic with
bidirectional current flow.
▪ Network topology changes intermittently due to RE based DERs
switching in and out.
▪ Increased fault current contribution by the DERs affecting the feeder
OC relay threshold (pick up) parameter setting thus compromising the
relaying (switching) strategy.
▪ Prevalence of DC-offset and its effect on fault current magnitude
estimation for OC protection. This is an existing challenge that must be
considered.
1.3.2 Challenges in High Impedance Fault Detection in Distribution Network
High impedance faults are an existing phenomenon, whether with or without
DER penetration will always be difficult to detect. While research has spanned
decades, a universal HIF detection and classification algorithm is yet to be
developed. This is because of the challenges imposed by the characteristics of the
HIFs. These include;
▪ Low fault current magnitude typically, between 10-50 A which is
much lower than the OC protection threshold (pick up) parameter
setting. This makes it difficult or impossible for the OC protection
mechanism to respond to HIFs. Thus, requiring HIF detection
strategy that does not rely on OC threshold.
▪ The HIF current waveform is erratic and has asymmetrical positive
and negative half cycles with shoulder shape.

Chapter 1: Introduction 13
▪ The HIF current has high frequency harmonic components from 2 to
10 kHz
▪ HIF current build-up
▪ Non-stationary frequency spectrum
▪ Highly random, with non-linear voltage-current (V-I) characteristics.
No two HIF will exhibit same characteristics
▪ HIF characteristics are dictated by the contact surface, the network
condition, the environment and the weather condition.
1.3.3 Challenges in DC Arc-Fault Detection in DC Bus and PV Strings under
Low Irradiance
DC loads and DC sources are connected through a DC bus. In a PV system,
particularly on the DC side, fault can occur at the input to the inverter or at the DC
bus (bus formed by connecting the PV strings) or at the PV strings. The challenges in
DC Arc-Fault detection that forms the basis for the motivation in the DC arc-fault
detection proposed in this research include;
▪ The existing (conventional) DC OC protection scheme is incapable of
detecting DC arc-fault.
▪ There is no natural zero-crossing on DC system faults, including DC
Arc fault making it difficult in DC Arc-fault detection.
▪ DC Arc-faults are difficult to detect in PV systems, under low
irradiance, partial shading and day to night transition
1.4 RESEARCH AIMS
The aim of this research is to develop a Fault Detection and Diagnostic Tool
that can be used seamlessly in AC and DC distribution systems. The attributes of this
tool are then used to propose strategies for; Adaptive OC protection in distribution
networks with increased DER penetration, HIF detection and DC Arc-Fault detection
in PV systems which are defined herein.
1.4.1 Strategy for an Adaptive Feeder OC Protection Scheme
The feeder OC protection would have the following attributes;

14 Chapter 1: Introduction
1) Adaptive to the change in landscape of power system structure at the
distribution network.
2) Be versatile in the presence of bidirectional current flow and increased
fault current injection from the DERs resulting in lower current magnitude
at the feeder substation.
3) Having an OC threshold that is adaptive to the changing current magnitude.
4) Fast computation of fault current magnitude including suppression of the
exponentially decreasing DC-offset.
5) Must be able to detect power system fault and issue trip signal within 1
cycle of the fundamental frequency.
1.4.2 Strategy for HIF Detection and Classification
The attributes of the HIF detection and classification strategy would include;
1) Operate in tandem with OC protection system
2) Detect and classify HIF based on the HIF characteristics
3) Must be able to differentiate between a HIF and non HIF related
disturbances
4) Detect HIFs within a reasonable time delay
1.4.3 Strategy for DC Arc-Fault Detection in PV Systems
The attributes of the DC Arc-Fault detection in PV systems would include;
1) DC Arc-fault detection based on DC Arc phenomena that does not require a
threshold parameter. In other words, make use of the chaotic behaviour of
the DC arc phenomena to detect DC arc-fault.
2) Detect Arc fault under all conditions including, low irradiance, partial
shading, night to day transition.
3) Must be able to identify the faulted PV string
1.5 RESEARCH QUESTIONS
To meet the research aims, the following research questions are defined;

Chapter 1: Introduction 15
1) What is the effective strategy for fault detection and diagnosis that can be
applied in both AC and DC power networks with DC-offset suppression
capability in AC power system fault detection as well as convenience of
application in adaptive overcurrent protection in radial distribution feeders
with increased RE based DER penetration?
2) What are the analytical and computational methods for developing a fault
detection and diagnostic tool that can be seamlessly utilized in both AC and
DC power systems?
3) Are the analytical and computational tools capable of performing feature
extraction for high impedance faults detection?
4) Are the analytical and computational analytical tools capable of performing
feature extraction for DC Arc-faults detection?
1.6 RESEARCH CONTRIBUTIONS
The following are the contribution from this research:
-Tool for Fault Detection and Diagnosis: A fault detection and diagnostic tool
based on Mathematical Morphology for time-domain analysis of the fault signal
called the decomposed open close alternating sequence (DOCAS) morphological
fault detector algorithm is proposed. This tool is a multistage filter based on two
nonlinear morphological filters namely; the morphological median filter (MMF) and
the alternating sequential filter (ASF). The MMF filter is comprised of two cascaded
stages where the output of the first stage becomes the input to the second stage while
the ASF has two layers; the open-close and the close-open alternating sequential
filters each with four stages. The two layers of the ASF operate simultaneously, and
each stage of the ASF is cascaded in a hierarchical manner where the output of the
previous stage is cascaded to the next stage. This operational sequence is achieved
through the decomposition of the filtering signal call the structuring element (SE)
into two SEs used in the two different filters. The underlying nature and computation
technique in the DOCAS algorithm makes it possible for its application in both the
AC and DC power system fault detection and diagnosis. The complete process in
developing the DOCAS algorithm is presented in section 3.4.
-Methods for analysing impact of RE based DERs on fault current
magnitude and Adaptive Inverse Time Overcurrent Relaying for Radial

16 Chapter 1: Introduction
Distribution Feeders with RE based DERs: An analytical method by means of
Thevenin parameter estimation and two distance factors, distance to the RE based
DER and distance to fault, to analysing the impact of the level of DER penetration on
feeder current magnitude is proposed. Then a technique for adaptive pickup setting in
overcurrent relays in distribution feeder overcurrent protection schemes using the
DOCAS MFD output is proposed. Moreover, a technique for determining the relay
trip time using inverse time overcurrent relay based on the adaptive pickup parameter
is proposed. The techniques are presented in Chapter 4.
-Method for the Detection and Classification of HIFs: A technique for the
detection and classification of HIFs based on feature extraction using the DOCAS
algorithm was developed. The HIF features extracted from the DOCAS MFD output
include the HIF randomness and the arc extinction and re-ignition feature. The
feature extraction and HIF detection and classification are presented in Chapter 5.
-Method for DC arc-fault Detection: A technique for DC arc-fault detection,
with applications in PV systems at any level of irradiance using the DOCAS
algorithm was developed. The technique uses the DOCAS algorithm to generate
MFD spikes to the chaotic behaviour of the sustained DC arc when ignited. The
DOCAS algorithm generates MFD spikes in response to the rate of change of the arc,
and the spikes sustained if the DC arc-fault exist. The technique is presented in
Chapter 6.
All the contributions are aligned to overall objective of the title of the thesis
with specific research aims defined in subsections 1.4.1, 1.4.2 and 1.4.3 in section
1.4.
1.7 SIGNIFICANCE OF THE RESEARCH IN BUSHFIRES AND
WILDFIRES PREVENTION
Power system infrastructure, including switchgear and powerlines at all
subsystems of the power delivery system are constantly exposed to elements such as
changing weather conditions and ageing and are prone to damage of fault conditions.
In many circumstances the faults occurring on or involving powerlines have been
blamed as sources of catastrophic bushfires and wildfires resulting in substantial
destruction of properties and sometimes tragic loss of lives. For instance, on the 7th
of February 2009, major bushfire, known as the Black Saturday bushfires in the state
of Victoria in Australia destroyed lots of properties, livestock as well tragic loss of

Chapter 1: Introduction 17
173 lives. The Victorian Bush Fire Royal Commission identified electricity
distribution infrastructure as the cause of these fires [24]. The Royal Commission
based on its investigations made 67 recommendations of which 8 are directly to the
electricity distribution infrastructure. The Victorian government in response to the
recommendations of The Royal Commission established a Powerline Bushfire Safety
Task force to investigate the recommendations directly related to the electricity
distribution infrastructure. The Task force furnished a report on the 30th of
September 2011 to the Victorian government, and out of several recommendations,
one was for further research into improving safety by identifying and introducing
new technology and methods for reducing risks and preventing bushfires ignited by
the electricity distribution system.
Powerlines span several hundreds of kilo meters and are exposed to weather
and often come into contact with trees and vegetation. Fallen powerlines due to
support structure failure and/or powerlines coming into contact with vegetation
almost always result in arcing. Unlike short circuit faults, these conditions are
classified as high impedance faults (HIFs) and generate low fault current magnitudes
resulting in not being detected by the overcurrent protection system. The longer the
arcing fault conditions persist, the higher the risk of igniting fire and electrocution of
people. These conditions must be detected and eliminated before they escalate into
any catastrophic events like bushfire and wildfires.
Bushfires and wildfires are disastrous events that are bound to happen if the
arcing sources such as HIFs are not detected and removed. HIFs generally result in
low fault current magnitude thus making it extremely difficult for their detection
using the conventional overcurrent (OC) protection scheme. Thus, specialise
algorithm specifically for arc-fault detection including HIFs have to be developed
that can work in tandem with the conventional OC protection system. Thus, the
DOCAS algorithm satisfies this requirement. Moreover, the DOCAS algorithm can
be used as part of an online intelligent power line condition monitoring system, for
the detection of arcing events.
Fire in DC systems including PV based DERs is major cause for concern. The
DOCAS algorithm can be seamlessly utilised in DC systems to detect the
occurrences of DC arc-fault as fire prevention mechanism in DC systems including
PV systems.

18 Chapter 1: Introduction
1.8 THESIS OUTLINE
This thesis consists of seven chapters including Chapter 1 which covers the
Introduction where the problem statement, the research objectives, the research
questions and research contributions were defined. The overviews of the rest of the
chapters of the thesis are presented herein:
Chapter 2: This chapter reviews literature on the three topics defined in the
problem statement including, 1) Challenges in overcurrent protection in radial
distribution feeders with increasing penetration of RE based DERs, 2) Challenges in
HIF detection in distribution networks and 3) Challenges in DC arc-fault detection
on the DC bus in PV systems.
A background review on the existing practice in radial distribution feeder OC
current protection and relaying strategy, and the drawback in its non-adaptive nature
in the face of increasing DER penetration are discussed. Moreover, a discussion on
the prevalence of the exponentially decaying DC-offset that occurs during short-
circuits faults and its ramification on feeder OC protection is provided. Several
existing techniques proposed in the literature to overcome the drawback and
challenges including suppression of the exponentially decay DC-offset in feeder OC
protection are discussed. The discussion is concluded with justification for a new
fault detection and diagnostic tool that is adaptive to the changing distribution feeder
network in the presence of increasing DER penetration as well as having immunity to
the effect of the exponentially decaying DC-offset.
A background review on the characteristics of HIFs and the challenges in their
detection based on the OC protection scheme is discussed. The identifying
characteristics of HIFs and the proposed HIF feature extraction techniques proposed
in the literature are discussed. Moreover, since this research is based on modelling
and simulation, a discussion on the proposed HIF models used in simulation studies
is provided to determine the appropriate model used in this research. The topic
review is concluded with justification of the proposed HIF detection technique as
well as HIF simulation model used in this research.
A comprehensive review on PV systems as well as their integration to the
distribution network feeders is discussed. Furthermore, the types of the DC arc-faults
and their causes discussed. A background review on the existing DC bus protection
scheme in the PV systems and the challenges in DC arc-fault detection is discussed.

Chapter 1: Introduction 19
Then a review on the proposed techniques existing in the literature to overcome the
challenges in DC arc-fault detection is presented. Furthermore, a review on the
proposed DC arc models used in DC arc simulations is done to determine the model
for use in this research. The topic review is concluded with the justification for the
proposed DC arc-fault detection and the DC arc model used in the simulation studies
in this research.
Finally, a summary of the literature reviews and their implications in
developing a research methodology that answers the research questions, and thereby
achieving the research objectives is presented.
Chapter 3: This chapter describes the development of a universal multistage
MM based filter called the decomposed open-closed alternating sequence (DOCAS)
morphological fault detector algorithm in answering the research questions to
achieve the research objectives defined in Chapter 1. The mathematical fundamentals
of the MM based techniques and detail descriptions of the composition of the
DOCAS algorithm are presented. The attributes of the DOCAS algorithm in adaptive
feeder OC protection, HIF feature extraction for the detection and classification of
HIFs as well as DC arc-fault detection are presented through simulation of simple
AC current and DC arc current signals.
Chapter 4: In this chapter, the impact of increasing RE based DER penetration
on the feeder current magnitude and its implications on the feeder OC protection is
first analysed by, 1) theoretical analysis using Thevenin equivalent circuit modelling
and decomposition of the circuits into sequence networks to determine relationship
for the level of fault current injection under fault condition by the DERs, thus
reducing the level of fault current magnitude seen by the feeder relay. 2) A radial
distribution feeder with RE based DER penetration is modelled using Simscape
library objects in MATLAB/Simulink. Different fault conditions, including single
line-to-ground (SLG), line-to-line-to-ground (LLG) and three phase (3-Ph) faults
were simulated at different locations on the feeder length under different DER
penetration levels, and the results were analysed using the DOCAS algorithm to
verify the trend in fault current magnitude reduction due to RE based DER
penetration. Then a method for short-circuit fault detection with adaptive threshold
parameter and adaptive inverse time overcurrent (ITOC) relaying using the DOCAS

20 Chapter 1: Introduction
MFD output is proposed to overcome the challenges in feeder OC protection
influenced by the increasing RE based DER penetration.
The theoretical analysis and simulation result of the technique used in
suppressing the exponentially decaying DC-offset are also presented.
Chapter 5: In this chapter, the application of DOCAS algorithm in HIF
detection and classification using several classifiers using the MFD output signal is
demonstrated. Cases of HIFs were simulated using the IEEE 13 bus test system.
Moreover, different contact surfaces were simulated by randomly changing the
effective resistance and the voltage and current signal were recorded. Moreover, non
HIF conditions were simulated to differentiate the non-HIF characteristics from the
HIF characteristics. The DOCAS algorithm was used to analyse these cases to verify
the effectiveness of the DOCAS algorithm in HIF feature extraction and
classification based on the MFD output signal. A HIF detection and classification
technique based on two HIF characteristics, namely the randomness and the HIF arc
extinction and re-ignition characteristics is presented.
Chapter 6: In this chapter, a method for DC arc-fault detection on the DC side
of the PV DER system using the DOCAS MFD output is presented. The DC arc-fault
detector utilises the DOCAS algorithm with no changes to it, and different arcing
faults including parallel, series and mismatch faults were simulated and analysed.
The DOCAS algorithm showed superior characteristics in detecting theses DC arc-
faults even at low irradiances. Moreover, the robustness of the DOCAS algorithm in
detecting DC arc-fault is tested with active maximum power point tracking and
transition in irradiance from partial shading.
Chapter 7: In this chapter, the conclusions from the research finds are
provided. The significant research contributions are specified, and the benefits and
importance of the proposed methods are summarised. Finally, recommendations for
future research directions are suggested.

Chapter 2: Literature Review 21
Chapter 2: Literature Review
2.1 INTRODUCTION
The issues and challenges from the paradigm shift in reshaping the landscape
of the power distribution networks due to increasing levels of penetration of RE
based DERs at the radial distribution feeders are discussed in this chapter. The issues
and challenges including: 1) Challenges in overcurrent protection in radial
distribution feeders with increasing penetration of RE based DERs such as PV
systems, 2) Challenges in HIF detection in distribution networks and 3) Challenges
in DC arc-fault detection on the DC bus in PV systems are discussed.
The chapter begins with discussions on the existing radial distribution feeder
OC current protection including relaying strategy. The drawback in the existing
feeder OC protection system is that, the pickup OC threshold setting is fixed, thus
making it non-adaptive in the face of increasing DER penetration. A review of the
proposed methods in the literature aimed at providing an adaptive solution to the
fixed pickup OC relay setting is discussed. Furthermore, a discussion on the
prevalence of the exponentially decaying DC-offset that occurs during short-circuit
faults and its ramifications on feeder OC protection, and the proposed methods for its
elimination are presented.
Moreover, in power system distribution networks, occurrences of HIF are quite
common. Unlike short-circuit faults, HIFs generally results in low fault current
magnitudes, thus rendering the OC protection system incapable of detecting HIFs.
The methods for HIF detection and classification based on HIF feature extraction
rather than fault current magnitude have spanned decades and are continuing to be an
active part of research today. The highly random and illusive nature of HIF has
proven to be very challenging in developing a universal HIF detection and diagnostic
tool. However, over the years, new methods of HIF modelling and feature extraction
techniques have evolved. A review of the characteristics and challenges in HIF
detection, and the proposed techniques for HIF detection and classification existing
in the literature are presented.
Moreover, the integration of the RE based DERs at the distribution network
feeders have introduced new opportunity for load diversification such as DC loads

22 Chapter 2: Literature Review
which are gaining momentum due to the advances in power electronic converter
technologies. RE DERs such as PV systems are naturally DC power sources and
provide opportunity to develop DC power systems. However, such systems are
generally exposed to the elements such as weather, aging, etc., and thus not immune
to fault conditions. In the interest of optimising service continuity and prevent
damage to these systems, it is mandatory to have reliable and effective protection
against any form of faults including DC arc-faults. DC arc-faults are very dangerous
and can have devastating effect on the PV systems, let alone any DERs that supply
power to DC loads if not detected a timely manner. Discussions on this chapter are
extended by providing a review on the challenges in DC arc-fault detection and the
proposed techniques in DC arc-fault detection existing in the literature.
A summary and implications of the review are provided to justify the reasons
for the choice of the time domain signal processing technique called mathematical
morphology for the design of the composite algorithm for seamlessly application in
AC and DC power distribution systems fault detection.
The rest of the chapter is organised as follows: In section 2.2 the background
and overview of distribution network feeder overcurrent protection including
literature review are presented. Section 2.3 presents overview on the characteristics
of high impedances faults and literature review on HIF detection and classification
techniques and HIF arc models. In section 2.4, review on DC arc-faults and the
challenges in their detection are presented. Section 2.6 discusses the summary and
implications including discussions on the application of MM in detection and
diagnosis of abnormal conditions in power distribution networks.
2.2 RADIAL DISTRIBUTION FEEDER OVERCURRENT PROTECTION
The radial distribution network referred to in Figure 1.4 indicates that the
current is directional and emanating from the substation source through the main
radial feeder and distributed to all the users connected to it. The current flow must
always be maintained to guarantee service continuity to all connected users.
Fault conditions such as short-circuit faults occur in distribution network
feeders due to exposure to the elements such as lightning strike, falling trees from
bad weather as well as through unintentional human-caused accidents, etc. Thus, it is
imperative on the service provider to implement a reliable protection system to
minimize damage to network apparatus as well as the possibility of total power

Chapter 2: Literature Review 23
outage from such conditions while allowing unaffected parts of the network to
continue receiving power.
The main type of protection scheme implementation in radial feeder can be a
simplistic system such as OC protection using the current magnitude as the threshold
metric (pick up parameter) in the OC relay. The conventional OC protection system
assumes unidirectional current flow as well as having a fixed pickup setting
determined through load flow study. The feeder OC protection system based on this
assumption has been designed such that the coordinated switching strategy will be
maintained for all conceivable states and network configurations [25]. The OC
threshold settings of the relays as implied is non-adaptive and the fixed value is
maintained irrespective of change in network conditions such as load changes and
network topological reconfiguration. The fixed threshold setting based on the
location of the protective device is to ensure that all protective devices including
protective relays within a switching strategy are coordinated. However, the
introduction of the RE based DERs in the distribution feeders upsets the operation of
the conventional OC protection scheme.
A schematic of a typical OC protection for radial feeder is shown in Figure 2.1
where the main relay (R) is configured to provide backup protection and maintain its
reach of coverage to the furthest point. However, the DER penetration at any point in
the feeder will require adaptive schemes to respond to changes in the conditions of
the power distribution network feeders [26]. In OC protection, the parameter that
needs to be made adaptive is the threshold metric. The OC threshold setting must
automatically adjust (adaptive) to reflect the changes in the network.
As pointed out, current is the common parameter in a radial distribution
system, and under fault conditions, the current magnitude can increase significantly.
Hence, current magnitude is naturally taken as a positive indicator of any fault
condition. Hence, overcurrent protection schemes widely use current magnitude as
the threshold metric to detect fault by testing it against a predefined parameter value
such as the pickup setting of the overcurrent relay. If the increase in current
magnitude seen by the relay is larger than its pickup setting, then a signal is issued to
the circuit breaker to isolate the fault [27].
Power system fault conditions are classified either as temporary (transient) or
permanent faults, and cause increase fault current magnitude. A simple
implementation of the radial distribution feeder system overcurrent protection is

24 Chapter 2: Literature Review
largely non-directional which requires only detection of current magnitude without
the complexities of phasor measurement. This requires strategic placement of
protective devices such as, relays with associated circuit breakers, automatic circuit
reclosers (ACRs) and fuses to operate in a coordinated manner to mitigate the impact
of both temporary and permanent faults. A typical example of one such arrangement
is shown in Figure 2.1.
The fuses are placed on the primary side of distribution transformers for
overcurrent protection of lateral branches to protect against temporary as well as
permanent faults while relays are place on the main feeder. The main circuit breaker
(CB) at the substation and the ACRs have overcurrent relays to initiate tripping if
temporary as well as permanent faults happen along the feeder. The main CB located
at the feeder substation performs dual functions of substation transformer protection
as well as backup protection for the ACR at B. It can be further seen that, the main
feeder CB controlled by the main relay R if operated will de-energise the entire
feeder. Therefore, under this circumstance, the main feeder relay is providing
complete backup overcurrent protection for the feeder.
In maintaining an effective feeder OC protection, all the protective devices,
including fuses, ACRs and relays must be coordinated to maintain synchronised
switching or relaying strategy. For this to happen, and referring to Figure 2.1, load
flow and short circuit studies must be performed on the feeder to determine the
available fault current magnitude at all locations including the substation where
protective devices will be placed. These studies are performed to determine the fuse
rating as well as the pickup setting of the OC relay including the ACRs.
Selectivity: This is a functional characteristic of the OC relay, to only isolate
faulted equipment or network segment while allowing service continuity to healthy
network segments. In distribution feeder OC protection, selectivity is achieved
through sectionalizing the feeder into zones of coverage to achieve coordination by
strategically placing protective devices like relays and ACRs. The zones also define
the reach of the relay. Relays are designed to cover up to certain distance of the
feeder, and this distance is defined as the reach of the relay [28]. In Figure 2.1, zone
1 defines the reach of the main feeder relay, and similarly, zone 2 defines the reach
of ACRs at locations B. Faults outside of zone 1 are considered too small to be
picked up by the relay at A. Thus, the ACR at B with smaller pickup current
magnitude than the relay must clear such faults.

Chapter 2: Literature Review 25
Radial feeder OC protection uses inverse-time OC relationship where the CBs
within the faulted zone must operate, with the one nearest to the fault operating first
at the time to trip depending on the selected inverse time overcurrent (ITOC) relay
curve. To apply the ITOC principle to the radial feeder of Figure 2.1, let’s first
generalise that, any relay and associated breaker on the right side with respect to
another set is considered as being downstream to that set, and by inference, the set on
the left is upstream to the set on the right. Thus, ACR at B is downstream to the
substation relay. Moreover, the notion of downstream also implies the direction of
current flow which is uni-directional from the substation source to the length of the
feeder. Supposing a fault occurs towards the end of the feeder at point XF, ACR at B
will register larger fault current magnitude followed by the relay R at the substation
(Location A). ACR at B must respond to isolate this fault. Coordination is achieved
through defining tripping times, particularly in the controlling relays for the main CB
and ACR. The OC relays and ARCs have trip time setting and the trip time is made
inversely proportional to the magnitude of the fault current. In other words, the larger
the current magnitude is, the faster the trip time is. This implies that the relay closer
to the fault will see larger fault current magnitude as compared to relays further away
from the fault location, thus allowing the relay closer to the fault to activate its
breaker first.
The effectiveness of any OC protection scheme, including radial feeder OC
protection scheme is contingent on the availability of sufficient fault current level
above the relay pickup setting to provide reliable protection. For the radial
distribution feeder, the maximum fault current seen by the main relay R or measured
at the feeder substation would occur, under any load and generating condition for a
fault nearest to the substation. Therefore, fault data is computed at the HV bus of the
distribution subsystem. Information on fault data determines the rating of the fuse
and fixed threshold setting of the relays for proper coordination as previously stated.
With DER penetration, the load is distributed and taken up by the DERs
consequently reducing the current flowing from the substation, thus reducing the
current magnitude seen by the substation relay. The implication is that the conditions
under which the entire OC protection has been designed for such as the threshold
parameter and the fuse ratings are affected and may not maintain the switching
strategy coordination.

26 Chapter 2: Literature Review
Figure 2.1: A typical feeder overcurrent protection scheme
The integration of the DERs requires that the feeder OC protection must be
adaptive to the changing network condition to provide reliable and effective OC
protection. One of the aims of this research defined in section 1.4 is to develop a
strategy for an Adaptive Distribution Feeder OC protection, and the vehicle for such
implementation is the digital OC protective relay.
2.2.1 Feeder Overcurrent Protective Relaying
The effectiveness and reliability of any protection scheme to respond to any
threat is as good as its relaying or switching strategy. Protection relaying is the
science or engineering involving the design and configuration of switching devices,
to detect any abnormal power system condition, then perform coordinated switching
based on two inequality constraints, fault magnitude threshold and switching time
delay [29]. The OC relay is the device that performs these functions.
Generally, a protective relay is a switching device that activates its contact
based on a decision made through certain test conditions as implied in the schematic
diagram of Figure 2.2. The protective relay can be visualized as having two
functional components, the decision logic mechanism and the contact mechanism
which also includes the relay coil. Power systems protection relays have evolved
over the years from traditional electromagnetic to modern digital relays. This has
seen the transition of particularly the decision logic functional component from
hardwired logic to software algorithms. In this perspective, it can be visualised that, a

Chapter 2: Literature Review 27
relay has software algorithm that drives the hardware/switching component based on
some predefined constraint parameters.
Input
currentDecision
Normally OpenRelay Contact
Time Overcurrent Relay
Time setting
Pickup setting
Trip
signal
Figure 2.2: Functional blocks of a Time Overcurrent Relay
The protective relays continuously monitor the condition of the power system
by reading voltage and/or current signals, comparing the measured quantity values
with threshold inequality constraint. The relay sends appropriate trip signal
depending on the state of the power system network. The relay determines the state
of the power system network as stated here [1] ,[27]: The operation of the relay to
determine the state of the power system can be graphically illustrated by the block
diagram of Figure 2.3.
Normal State: The power system is said to be operating at its normal state if there
is no sudden or abnormal change (increase/decrease) in the power
system current magnitude. Any normal operating condition that
resembles characteristics of abnormal state must be discriminated
by the relay. Referring to Figure 2.3, lets denote the measured
(input) current x, and constraint to test the measured current against
the pickup setting, Xm. The system is said to be in normal state if x
< Xm.
Abnormal State: The power system enters an abnormal state if x > Xm. This does
not necessarily mean a fault has occurred. It simply implies
abnormal current has been detected. The protection relay gets into
an alert mode to indicate presence of an abnormal condition.
Action State: A time delay, t is initiated and compared against an inequality time
constrain, Tm through the time setting. If conditions, t ≥ Tm, and x

28 Chapter 2: Literature Review
> Xm exist, then fault is declared, and action outage is initiated to
isolate the faulting device or unhealthy network segment.
Restorative state: If the fault is of temporary nature, the breaker reclosure action is
initiated by the relay to restore the network state of operation to the
condition before the fault. If, however the fault is permanent, the
fault is appropriately cleared, and the power system is restored.
Figure 2.3: Relay states for power system fault detection
2.2.2 Feeder Overcurrent Relay Settings
The feeder OC protection is implemented using inverse time overcurrent
(ITOC) relays [29] .These types of relays have one input for current measurement
and two settings, pickup setting determines the fault current magnitude to which the
relay should pick up, and the time setting determine the relay time to operate [27] .
Supposing, x is the measured current magnitude, and Xm is the pickup setting, then
the severity of the fault is determined by the ratio (x/Xm). If (x/Xm) < 1, the system is
in normal state and normal load current flows through the feeder. If (x/Xm) > 1, the
system is experiencing abnormal condition and the relay should pick up. The more
severe the fault is the higher the (x/Xm) ratio. Therefore, to cover all faults in the
zone of protection, a pickup setting that can pick up fault current for all faults in the

Chapter 2: Literature Review 29
region must be selected, and this is normally the first step in applying inverse time
OC protection.
2.2.3 Inverse Time Overcurrent Relay
Inverse time overcurrent relays provide the mechanism for protection
coordination in radial distribution feeders. The inverse time overcurrent relay
synergises well with the notion of faster relay operating time at higher fault current
magnitude and slower time for lower fault current magnitude. In electromechanical
relay, time settings, call time dial settings/time multiplier settings (TDS/TMS) of ½
to 10 are used to determine the relay operating time, were TDS of ½ being the fastest
and 10 being the slowest. Moreover, the TDS/TMS determine the time-current
characteristic curve of the relay used to determine the operating point of relay. The
TDS settings were used to mark the position of the rotating contact on the relay disc
(normally at reset position) with respect to the fixed contact. And the speed of the
rotating disc was proportional to magnitude of the current, where higher fault current
magnitude would result in faster disc rotation, thus less time for the rotating contact
to reach and make contact with the fixed contact to enable the trip signal to be sent.
Conversely, lower fault current magnitude resulted in slower disc rotation, thus
longer for the rotating contact to reach the fixed contact, thus resulting in an inverse
time current relation [29]. This concept is adopted by the digital relays where TDS
are programmed through the relay algorithm. In digital relays, any imaginable relay
curve can be generated. However, it must be noted that a lot of electromechanical
relay are still in use today. Thus, to maintain compatibility between the different
relay types, the digital relay TDS parameters must be standardized to have
compatible current-time characteristic curves.
Different equations to determine the time-current relationship in ITOC relays
based on exponential and polynomial equations were proposed [30],[31],[32]. To
standardise the digital relays to be compatible with the electromechanical relays, the
Power System Relaying Committee of the IEEE Power Engineering Society released
a standard, IEEE C37.112-1996 [33],[34] in 1996 that defines the characteristic
equations for the ITOC relays [35] . The equation in (2.1) defines the relay trip
characteristic [33] ;
( )1
At I B TDS
M
= +
− (2.1)

30 Chapter 2: Literature Review
Where t(I) is the trip time of the relay in seconds. The other parameters in the
characteristic equation are; M = I/Ipickup is ratio that determines the relay pick up
point. The other parameters, A, B and ρ are current tap setting (CTS) constants that
determine the selected curve characteristics. The standard further defines three
standard relay curves, with Moderately Inverse, Very Inverse and Extremely Inverse
curves. The values for the constant parameters are given in Table 2.1. The standard
relay curves at TDS = 1 are given in Figure 2.4. Different trip times can be obtained
from these curves at different M = x/Xm = I/Ipickup values.
Table 2.1: CTS of a non directional ITOC relay
Characteristic A B p
Moderately Inverse 0.0515 0.1140 0.02
Very inverse 19.610 0.4910 2.00
Extremely inverse 28.200 0.1217 2.00
Figure 2.4: Standard inverse-time overcurrent relay characteristic curves at TDS =1
2.2.4 Radial Distribution Feeder OC Protection
The overcurrent (OC) protection strategy, from the foregoing discussion
implies, firstly accurate measurement of fault current magnitude, and then performs
comparison with a predefined OC threshold to determine if a fault has occurred. If a
fault has occurred, then the protection devices must respond in a coordinated manner
for fast and selective isolation of the fault anywhere along the feeder and laterals [36]
,[37]. The design and implementation of this strategy is effective as implied in radial
distribution network with unidirectional current flow, and this is the premise under

Chapter 2: Literature Review 31
which the existing feeder OC protection system was designed for. However, coupling
of DERs to the distribution feeders alters the topology of the distribution network
making it a multi-source dynamic network with bi-directional current flow. The
effectiveness of the distribution feeder OC protection system is contingent on
accurate measurement of fault current magnitude, the penetration of DERs reduce the
current magnitude seen by the feeder substation OC relay both under normal and
fault conditions. Moreover, the presence of DC-offset during short-circuit fault can
further degrade the fault current magnitude resulting in loss of coordination among
protection system devices; thus, rendering the feeder OC protection system
ineffective.
Various proposals from different researchers exist in the literature proposing
strategies and techniques for an effective and adaptive OC protection system in the
presence of increasing DER penetration.
An adaptive protection scheme based on diving the existing distribution
networks into zones and maintain a load balance with the application of emerging
technologies for updating of network status has been proposed by Brahma et al. [38]
and Javadian et al. [39] . This would require high capital investment. Various authors
including Baran et al. [28], Mahat et al.[40], Chen et al. [41], Yazdanpanahi et al.
[42] and Su et al. [43] have proposed various methods of adaptive relay setting to
maintain protection coordination. The authors in [28] proposed an adaptive scheme
based on changing the pickup setting of the OC relay by estimating the fault current
magnitude using an iterative technique. The speed of convergence of the technique
will determine the overall response time of the scheme, and this has not been
reported. In [40], the authors proposed an adaptive selection of appropriate relay
operating curves based on state estimation technique for faulted section detection as
well as detection of fault magnitude under grid connected and island mode. Authors
in [41] proposed another adaptive relay setting based on the operating mode of the
wind generator as well as network topology change and reconfiguration. Authors in
[42] and [43] have proposed adaptive protection strategies based on controlling the
inverter interfaced DERs output current under fault conditions by detecting the
decrease in voltage at the DERs, thus reducing the fault current contribution by the
DERs, hence allowing the OC relay to operate correctly using the existing setting.
However, with network topological change the relay preset parameters must be
adaptive for this to be effective.

32 Chapter 2: Literature Review
Shen et al. [44] proposed another algorithm based on dynamic Thevenin
parameter estimation to compute the estimated fault current magnitude for adaptive
relay setting. Kumar et al. [45] proposed a technique based on recursive discrete
Fourier transform for fundamental phasor estimation , and Fuzzy logic controller to
set relay trip setting . Costa et al. [46] proposed an algorithm based on boundary
wavelet transform for current phasor estimation OC protection. These proposed
methods as well as the previously mentioned strategies based fundamentally on
either measuring or estimating the prefault and fault current magnitudes. Presence of
DC-offset during fault will obviously affect the accuracy of phasor estimation, thus
impacting on the accuracy and effectiveness of the proposed schemes.
2.2.5 Exponential DC Offset Removal
Several different techniques have been proposed for the treatment of the effects
of the DC-offset. The widely proposed technique in the mitigation and elimination of
the DC-offset in the fault current signal require some form of filtering algorithm to
remove the DC-offset as highlighted in [47] and [48]. Most removal algorithms
based on, DFT, Kalman Filter, Morphological Filter, etc., require some form of
parameter estimations, particularly the inductance (L) and resistance (R) parameters
to estimate the Time-Constant, τ of the exponentially decaying DC-offset, the phase
angle and the amplitude. Depending on the algorithm, a full-cycle and two samples
or a half-cycle and one sample is necessary to estimate the required parameters [49],
and if the estimated parameter is matched with the preset value, then a total
elimination of the DC-offset occurs, otherwise the DC-offset can only be suppressed,
but not eliminated. Moreover, the computation for parameter estimation increases the
time delay in extinguishing the fault and can become unacceptable. A notable
contribution in the search for a fast and effective algorithm for the elimination of the
DC-offset is that proposal by Rahmati et al. [50]. This method is DFT-based where
the DC-offset can be reduced to an acceptable level by subtracting the odd and even
samples of the original phasor without estimating any parameter. This algorithm
greatly reduces the time delay associated with all those other algorithms. However
further analysis of this technique needs to be conducted for its real-time application
and robustness.
In summary, the conventional power system distribution network is a passive
network with unidirectional current flow supplying distributed loads along the feeder

Chapter 2: Literature Review 33
length. Simple overcurrent protection system using inverse time overcurrent (ITOC)
relaying strategy is implemented for overcurrent protection. The pickup setting on
the overcurrent relay is non-adaptive, and is compared against a threshold metric,
usually the current magnitude to activate the circuit breaker in the event of a fault.
With the changing landscape in power system structure with the integration of RE
based DERs, the distribution network is no longer passive, but dynamic with
bidirectional current flow. This results in more fault current injection from the DERs,
thus reducing the fault current magnitude at the feeder substation where the main
protection relay is located. This causes problem in protection system coordination.
Thus, to overcome this problem, the threshold parameter setting of the overcurrent
relay must be made adaptive to the changing network operating conditions.
Moreover, the existing relay algorithms in power system protection are based
are predominantly based on Fourier or Wavelet Transforms. These are integral
transforms and assume periodicity of the current and voltage waveforms to obtain
correct average of the signal parameters for the detection of the fault. However, it is
well known that current and voltage waveforms experience transients during
disturbances. Furthermore, power system signals are not immune to corruption due to
inherent system noises such as Gaussian white noise, harmonic distortion, high
frequency transients from natural phenomena like lightning strike, and the DC-offset
in the fault current due to short-circuit conditions. Such conditions compromise the
integrity of the algorithm and may result in the failure of the protection system.
Moreover, integral transforms are linear filters; however, in the presence RE based
DERs, a degree of nonlinearity is introduced due to the presence of different sources
and their operating parameters. The inverter interfaced RE based DERs such as PV
systems are stochastic, and their switching in and switching out introduces harmonics
and nonlinearity. Such situations may cause operational failure in the protection
system. To ensure high degree of reliability and security for optimum operation of a
power system, there must be an effective, sensitive, fast and robust protection system
for active distribution networks.
A method that does not rely on any parameter estimation for DC-offset
suppression is desirable to reduce computational burden and preserve speed in fault
detection capability of the fault detection and diagnostic tool.

34 Chapter 2: Literature Review
2.3 HIGH IMPEDANCE FAULTS (HIF) DETECTION AND CLASSIFICATION
Any power system fault conditions or events resulting in low fault current
magnitude not sufficient to overcome the threshold setting of the conventional
overcurrent protection scheme are classified as HIFs. Unlike short-circuit faults,
HIFs normally have high impedance fault path which limits the fault current
magnitude. Occurrences of HIFs are frequently experienced at medium-voltage
(MV) to low-voltage (LV) networks. HIFs can be grouped as, 1) fallen energized
conductor either broken or intact making unwanted electrical contact with high
impedance surfaces such as bitumen, concrete, sand, soil, etc., and 2) energized
overhead conductor making unwanted contact with tree trunk and branches [51].
Such contact surfaces provide a high impedance fault path to ground resulting in a
fault current magnitude of typically between 10-50 A rms with erratic waveform.
While the low HIF current magnitude may not pose immediate significant threat to
power system infrastructure; nonetheless, a fault condition exits. Moreover, if a HIF
is allowed to persist, it increases risk of fire and safety hazard for people. Moreover,
HIFs introduce harmonics, and can degrade the quality of power supply in the long
run therefore must be detected and removed within reasonable time [52].
2.3.1 Difficulties in High Impedance Detection using OC Protection Scheme
The overcurrent (OC) protection scheme in distribution network depends on,
accurate measurement of fault current magnitude, and then makes comparison with a
predefined threshold to determine the trip time. If the fault current magnitude falls
below the threshold, the event is ignored. Considering that the threshold in OC
protection is set at around 2-to-3 times the prefault load current, it is impossible for
any conventional overcurrent protection device, whose effectives is contingent on
secure and reliable detection of increased fault current magnitude above a predefined
threshold to detect HIFs to suffice [53]. Thus, a scope for HIF detection and
classification technique based, not only on fault current magnitude but combination
of other HIF characteristics exists.
2.3.2 Characteristics of High Impedance Faults
HIF characteristics are highly random and nonlinear which adds to the
challenges in developing HIF detection and classification using pattern recognition
and other feature extraction techniques. There are several factors including, ground

Chapter 2: Literature Review 35
contact surface material, weather, humidity, network topology, load condition and
voltage level [54] that dictate the randomness in HIF characteristic. The most
influential of all are; 1) contact surface material, which gives the nonlinear voltage-
current (V-I) characteristic and, 2) surface humidity which dictates the level of fault
current magnitude [55]. Generally, HIFs most often result in arcing creating an arc
channel for the fault current to flow. The arc channel can be represented by an arc
resistance, Rarc, which is highly random and inversely proportional to the surface
humidity [56]. The arc resistance restricts the magnitude of the fault current through
the arc channel. The fault current is further restricted by the high impedance contact
surface, whose resistance can be represented by, Rx. This gives an effective fault
resistance, Rf = Rarc + Rx seen at the fault location. Different contact surfaces have
different Rx. which defines the non-linear (V-I) characteristic for each surface
material. Rarc and Rx are random and usually very high values, which defines the
randomness and chaotic nature of the fault resistance.
For arcing to occur, a separation (gap) between the energized conductor and
high impedance contact surface must exist. The gap can be represented by an air-gap
breakdown voltage, Vbr, which must be overcome by the conductor voltage for arcing
to take place. Considering that the conductor voltage is cyclic at 50Hz, there are two
zero-crossing every half cycle which the arc is extinguished at, then re-ignites at
about the positive and negative peaks. Moreover, Vbr retains random value each half
cycle resulting in asymmetrical fault current waveform with unequal positive and
negative half values stated in [57] and [58]. Furthermore, the fault current gradually
escalates to its maximum value due to slow initial contact separation, and maintains
this value for several cycles giving the build-up and shoulder characteristics of the
HIF current [59]. Moreover, the HIF current contains high frequency harmonics of
between 2-10 kHz [60].
Voltage and current signals are the primary quantities in fault detection, and
from the foregoing discussions, it can be concluded that HIFs do not manifest clearly
in voltage and/or current variation. Moreover, the discussion alludes to the fact that;
HIFs exhibit highly random and non-linear characteristics influenced by the
environment and network condition. Furthermore, the physical characteristics of HIF
are specific to the condition at which the fault occurred. This implies that it may be
impossible to detect all cases of HIFs based on a single technique that targets a single
HIF signature. Thus, for a secure and dependable HIF detection, an algorithm

36 Chapter 2: Literature Review
incorporating multiple techniques targeting more than one HIF characteristic may be
necessary.
Researchers in the past have proposed methods for HIF detection based on
feature extraction. Some of the success in identifying the characteristics of the HIF is
attributed to these researches.
The systems for HIF detection are classified as either mechanical or electrical
[61]. Mechanical protection using forced grounding to activate the conventional
protection system was introduced by Wester et al. [62] however, this was abandoned
due to reliability issue and cost implication. Other methods such as lower threshold
settings were proposed by Sharaf et al. [63] which compromised relay coordination
resulting in nuisance and unwanted tripping. Electrical-based systems extract HIF
characteristics in the time-domain [64],[65], frequency domain [66] and time-
frequency domain [67]. Development in new and advance signal processing
techniques allowed for further improvement in the HIF detection and classification
process. The techniques involving expert systems and learning algorithms including;
Decision-tree based algorithm [68], Kalman Filter [69], artificial neural networks
[70],[71] and [72], fuzzy logic [73] and neuro-fuzzy [74] were proposed. Hybrid
frequency-time domain technique such as wavelet transform [75],[76],[77], and time
domain techniques such as Mathematical Morphology [78] have also been proposed.
Shen et al. [68] used a technique based on decision-tree to analyse the
harmonic current magnitudes; however, this does not perform well under noisy
environments. Samantaray et al. [69] proposed a technique based on Kalman filter
and support vector machine (SVM), which is based on statistical learning theory to
extract features of magnitude and frequency of the fundamental and some odd
harmonics components. The technique requires large data set for training which can
become problematic if good dataset is not available. The expert systems based on
neural networks are proposed by Eissa et al. [70] and Baqui et al. [71] and
probabilistic neural networks by Samantaray et al. [72]. These techniques are
sensitive to frequency change and require large training data set as well as building
complex nonlinear system by learning examples which be problematic with
insufficient data set or incorrect training. Etemadi et al. [73] proposed multiple
techniques including WT, fuzzy logic and ANN for HIF detection and feature
extraction, whereas a genetic algorithm based on WT, principal component analysis
and fuzzy logic is proposed by Haghifam et al. [74] . Bakar et al. [75] proposed a

Chapter 2: Literature Review 37
technique based on wavelet transform, and this is further enhanced by Mahari et al.
[76] and Costa et al. [77] with wavelet packet transform and boundary wavelet
respectively. The effectiveness of WT is based on the appropriate selection of mother
wavelet. Moreover, the technique is not immune to noise and the effect of dc-offset.
Gautam and Brahma [78] proposed a technique based on Mathematical Morphology
where the transients on the fault voltage signal are analysed. However, the algorithm
is limited to detecting the transients occurring only at or near the positive and
negative peaks. As the rate of appearance of transients depends on the rate of change
of the effective HIF impedance which is highly random, there is no guarantee that
transients will occur at those points on the input signal and hence jeopardizing the
robustness of the algorithm. Moreover, the algorithm depends on slope detection, this
means presence of harmonics and noise will cause spikes in the output of the
algorithm which can be easily confused with HIF.
2.3.3 High Impedance Fault Models
Considering the highly random nature of HIF characteristics, performing
staged tests would unlikely capture all characteristics of the HIFs. This is because
HIFs exhibit characteristics specific to the network condition, the environment and
weather conditions as well as the contact surface. Hence, any staged HIF tests would
not produce the same results. Moreover, staging HIF tests are dangerous and require
specialized equipment. Therefore, to overcome this limitation, simulation of HIF
characteristics using HIF arc models seem favourable, as it is flexible, and can cover
different conditions such as contact surface and network conditions. Therefore, to
perform HIF simulation tests as accurately as possible, developing or selecting a HIF
arc model that captures most, if not all the defined HIF characteristic is highly
imperative.
Research to develop realistic HIF arc models have spanned decades. Most
research conducted are based on staged and laboratory tests to develop HIF arc
models that capture the HIF characteristics for use in HIF fault detection [79],[80]
.[81]. The HIF arc or generally arc modelling for that matter can be placed into three
categories. The first group uses arc physics to correlate the arc resistance by means
of empirical relationship between parameters such as arc length and arc currents [82]
,[83]. The relationship between these parameters is defined by the equation in (2.1)
[83].

38 Chapter 2: Literature Review
0.8525arc
arc
LR
I= (2.1)
where Rarc is the arc equivalent resistance, L is the arc length, and Iarc is the arc
current. In practical sense, considering the highly random nature of HIF, this model
fails to capture that. To overcome this limitation, a second category of HIF arc are
proposed where the conductance of the arc is calculated by means of differential
equations [53],[84, 85]. The randomness parameter is introduced with a randomly
varying voltage parameter per arc length. This model is defined by the (2.2) [85];
( )0
( ) ( )1
( )
i t g tdg
dt u R i t l
−=
+ (2.2)
In (2.2), |i(t)|/(u0 + R|i(t)|)Ɩ represents the stationary conductance of the arc,
usually denoted G, and g and τ represent the instantaneous conductance and time
constant of the arc. The arc resistance and the arc length are respectively represented
by the T and L. The parameter, u0 is a constant voltage parameter per arc length that
can be randomised to capture the randomness characteristics. However, the solution
to this model relies on the assumption of a fixed arc length which is not always the
case especially with energised fallen conductor that swings.
A consensus was reached by researchers and reported by Vijayachandran et al.
[86] that any model that is proposed must encapsulate the following features of the
High Impedance Fault; arcing, unsymmetrical nature of the fault current, stochastic
nature of the fault current due to zero arcing period, harmonic and high frequency
components in the fault current, random and nonlinearity in the fault resistance.
A third category of HIF arc models are based on curve fitting technique where
electrical circuit components such as voltage sources, diodes, resistance and
inductances are connected to form a circuit that mimic the HIF current waveform
emerged. The first arc model in this category is the Emanuel arc model proposed in
1990 as shown in Figure 2.5 [87],[88]. This model was proposed based on laboratory
tests and measurements, and while it is simple, it attempts to characterise the
fundamental features of the High Impedance Faults. The schematic arrangement of
the diodes and the DC voltage sources models the unsymmetrical positive and
negative half cycle in the current waveform. Moreover, the randomness
characteristics are modelled by randomizing the dc voltage sources Vp and Vn in

Chapter 2: Literature Review 39
positive and negative half cycle respectively. Furthermore, the rectification process
in switching from positive half cycle to the negative half cycle results in zero current
magnitude at the zero-crossing of the fundamental frequency which conveniently
models the arc extinction and re-ignition at zero-crossing in AC arc. Noting that, the
Vp, Dp combination in parallel with Vn, Dn combination forms are full-wave rectifier,
thus resulting in a full cycle current waveform with unsymmetrical positive and
negative peak values with shoulder shaped form. Moreover, the rectification process
introduces harmonics and high frequency components in the current which
reminiscent of the HIF current characteristics, thus modelling those phenomena.
Figure 2.5: The first Emanuel HIF arc model
However, it was noted that the single resistor model does not properly account
for randomness in positive and negative half cycle when in contact with a high
impedance surface. Thus, a modification to the original Emanuel arc model is done
by placing either one or two resistor variable resistors in series with the DC voltage
sources to model the randomness introduced by different contact surfaces
[68],[69],[73],[89] . One such model is shown in Figure 2.6. Another HIF arc model
structurally different from the modified Emanuel HIF arc model is shown in Figure
2.7. This model is referred to as the Transient Analysis of Control System (TACS)
model. The TACS model while structurally different, attempts to accurately capture
the characteristics of the HIFs. The TACS model incorporates a nonlinear resistance,
time-varying voltage sources connected in parallel, but only one effective in each
half cycle, and transient analysis of controlled system switch to connect and
disconnect the fault and randomly vary the fault resistance.
The third category of HIF models has found wide application in time domain
simulations of HIF conditions.

40 Chapter 2: Literature Review
Figure 2.6: Modified Emanuel HIF arc model
Figure 2.7: TACS HIF arc model
In summary it can be said that, the most common HIF characteristic is AC
electric arc. Arcing most often follows the onslaught of HIFs, and it’s the arcing
phenomena combine with among others, parameters such as contact surface material
and weather condition that defines attributes of the HIF fault current. Most, if not all
proposed electrical methods attempt to extract features from the transients present on
the fault current induced by HIF for its classification. While many proposed
techniques exist in the literature for HIF detection and classification based on feature
extraction, a universal HIF detection and classification technique that combines

Chapter 2: Literature Review 41
different signal processing techniques targeting different features of the HIF still
does not exist.
2.4 DC ARC-FAULT DETECTION IN PHOTOVOLTAIC SYSTEMS
In connected PV systems as DERs, PV modules are connected in series and
parallel combinations to form PV arrays. One common PV system configuration is
shown in Figure 2.8 where the associated controls as well as interfacing technologies
are shown. PV systems incorporate power electronics converters such as DC-DC
converters and DC-AC inverters allowing for simultaneous supply of DC and AC
loads respectively. PV systems can operate either as a stand-alone power systems or
inverter interfaced DERs at the distribution network connected through a delta-wye
transformer. When grid connected, the RE based DERs especially PV systems
become integrated subsystem of the distribution network as they feed power to and
absorb power from it during periods of high and low irradiance respectively. This
balance of operation is considered normal, steady-state operation, and must always
be maintained to maximize the benefits of the PV system.
While the integration of the PV system or any other RE system as DERs for
that matter seems to address issues on environmental concerns, energy efficiency and
maintenance cost reduction, it however introduces technical challenges in protection
against system abnormalities that would be detrimental to or compromise the safe
and reliable operation of the PV system [90],[91]. Occurrence or existence of any
anomaly must be quickly detected and isolated to ensure safe, reliable and stable PV
system operation. Considering the PV system in Figure 2.8, faults on both the DC
and AC sides of the network can affect the PV system operation. DC and AC side
faults differ quite significantly in characteristics and require different detection and
classification as well as isolation techniques. While generalized fault detection is a
matter of concern in DC power systems, this research is concerned with DC arc-fault
detection as especially in PV systems under low irradiance. The system in Figure 2.9
alludes to the existence of a DC link at voltage of about 300 V or higher using DC-
DC boost converter [92]. DC arc fault can occur anywhere in such system, either at
the PV strings or on the DC bus system. Detecting DC arc faults on the PV strings is
challenging, particularly at low irradiance levels which can be difficult to detect.

42 Chapter 2: Literature Review
Typically, two types of arcing faults, parallel and series arcing faults as defined
in [93],[94] can occur on the DC side of the PV system. Typical DC arc-fault types
are elaborated herein.
Figure 2.8: A typical PV system configuration with MPPT
2.4.1 Parallel DC Arc-Faults
Typically, parallel faults are line-to-line short circuit faults that occur between
two points of unequal voltages of opposite polarities. This can be a bridge between
two lines (line-to-line) or two different points on the same line at different voltages
[95] . If a gap exists between the bridging conductors at the point of contact [96] a
DC arc can be ignited creating a route for the fault current through the restrictive arc
channel having resistance defined as arc resistance. This fault is classified as parallel
DC Arc-Fault. Moreover, the arc resistance limits the level of backed current from
the unfaulted PV strings which can be problematic in detecting the fault when fault
current is used as a threshold metric for fault detection. The probability of such faults
occurring is increased by exposed conductors due to insulator breakdown, exposed
dry solder joints, etc., making it possible for accidental bridging of conductors.
Parallel faults with arcing or otherwise occur in parallel to the load.
2.4.2 Series DC Arc-Faults
Unlike parallel faults, series faults are typically open-circuit faults; however, a
high resistive connection is maintained through the arc channel with limited backed
current through the arc resistance. Series arc faults usually result from mechanical
separation of conductor at the solder points or break in the conductor [97],[98] , and
occur in series with the load. Electrical discharge with arcing can occur between the

Chapter 2: Literature Review 43
contact separation due to the presence of moisture or fluid on the conductors thus
providing a high restrictive fault current path.
2.4.3 Conventional DC Protection System in Photovoltaic Systems
Protection against dangerously high fault current on PV systems, particularly
on the DC side involves placement of overcurrent protection devices (OCPD) such as
fuses on each PV string as well as placement of ground fault protection devices
(GFPD) for PV system with ground connections [23],[99]. Supposing the PV system
in Figure 2.8 has PV array configuration as shown in Figure 2.9.
There are two configurations for PV protection systems, 1) is a grounded
system where the PV arrays and strings are grounded to system ground as illustrated
in Figure 2.9, and, 2) is an ungrounded or floating system which can be represented
by the same system, however without the ground point (G). In both cases, the
protection system depends on sufficient fault current to activate any protection
mechanism. Supposing the system of Figure 2.9, both grounded and ungrounded
configuration experiences a short-circuit fault on PV string (PVS1) at point F as
shown. The conventional protection system for such faults on PV systems relies on
the existence of a sufficient fault current level denoted IF. Supposing, IF_PV is the
fault current contribution from the faulted PV modules from the faulting PV string
and Ibf is the backed current from the unfaulted PV modules in the faulting PV string
and from the unfaulted PV strings, then the total fault current through the fault path
is, IF = IF_PV + Ibf. Supposing the type of fault is a parallel arcing-fault to ground,
then IG = IF = IF_PV + Ibf where both components of the fault current exist. The fault
current IF can be interrupted by either or both F1 at PVS1 and the GFPD at G. Now
supposing the system is ungrounded, and the fault is a parallel fault between two
strings as shown in Figure 2.9 between two points on strings PVS1 and PVS2
represented by the dashed arrow line. The protection in this case depends on F1 and
F2 on strings PVS1 and PVS2 respectively to interrupt the fault. In this scenario, the
fault current IF has only one component, the backfed current (Ibf). It is also logical to
observe that, even if the system is grounded, and fault is ungrounded the only
protection is from the OCPD devices which depends on sufficient Ibf to interrupt such
fault conditions. Thus, grounded parallel faults on a grounded system can be easily
detected and interrupted as opposed to ungrounded faults on both grounded system
as well as ungrounded system.

44 Chapter 2: Literature Review
In the event of a series fault, IF = 0. However, if arc channel exists, then
IF = Ibf, but very much restricted by the arc resistance. Thus, in this research, only
ungrounded parallel and series arcing faults are considered. While grounded arcing
faults are not considered, it can be considered that, arcing fault through grounded
fault path is a case of parallel arcing fault with only the positive conductor contacting
grounded surface. Therefore, it envisaged that any DC arc detection technique
capable of detecting parallel arcing fault, more so series arcing fault under low
irradiance is equally capable of detecting ground fault under similar condition.
The only protection against onslaught from the fault current due to any fault on
an ungrounded PV system are the fuses installed on each PV strings, however only
the backed current is seen by the fuses. Therefore, any circuit component
intentionally installed that prevents the flow of backfed current such as blocking
diodes [99] or any fault condition that limits the flow of backfed current could
render the overcurrent protection devices (OCPD) ineffective for an ungrounded PV
system. In this research, it is assumed that blocking diodes are not installed; hence no
discussion on this is provided. The reliability of OCPD relies on sufficient fault
current magnitude to trigger the OCPD to operate. The fault current must be 2.1
times the rated short current of PV modules at standard test conditions (STC), 1000
W/m2, 25ºC. The following factors dictate the existence and level of fault current, 1)
irradiance, 2) type of fault, 3) location of the fault and 4) fault resistance [100].
Figure 2.9: Series and parallel connection of PV modules in typical PV array

Chapter 2: Literature Review 45
2.4.4 Challenges in DC Arc-Fault Detection in Photovoltaic Systems
In any electrical system, faulted system component or network section is
isolated by selectively powering it down. In PV systems, this can be accomplished by
isolating DC supply (zero current and zero voltage respectively for series and parallel
arcing faults) to the inverter by means of DC-disconnect switches at the DC input of
the inverter [101],[102]. Unlike other energy sources, PV systems continue to
produce power even under fault so long as the modules are exposed to irradiance.
This can be very dangerous for emergency repair work to be carried out. Thus, any
arcing fault whether series or parallel arcing fault must be detected under any
environmental and operating conditions first then the faulted PV source isolated to
prevent risk of damage to the rest of the system.
In the proposed technique, it is assumed that sensors are installed at PV strings
to detect arcs by monitoring any change in PV string current to determine the
condition of the string. Protection against arcing faults in a PV system by use of
series connected fuse or any protection device that relies on increased fault current
magnitude to be activated will not suffice as the arcing faults do not increase the fault
current. Detection of arcing faults in PV systems is even more difficult particularly at
low irradiance, and from the foregoing, it is obvious that the fuse will be totally
ineffective. DC arc in PV systems can be ignited by accidental disconnection at
points along the PV string or bridging of active conductors between strings. The
separation or loose bridging creates a gap between the conductors, which initially
results in high incidence of electric field build-up that ignites arcing, and the arc is
sustained once ignited. It has been shown that any voltage magnitude greater than
30V is sufficient to ignite a DC arc. Thus, even at low irradiance, it is possible to
ignite arc at the PV strings.
Difficulties in DC arc detection is compounded by the fact that, naturally DC
arc current and/or voltage lack the zero-crossing attribute found in AC systems,
which make arcs in AC system to extinguish at zero-crossing and re-ignite after as
opposed to arc in DC system which are sustainable once ignited. The inherent non-
existence of natural zero-crossing [96] in DC signals prevents the adaption of AC arc
detection techniques based on that attribute for DC arc detection [103]. The DC arc
detection difficulty is compounded in PV systems, particularly at low irradiance
which also includes night to day transition and partial shading. The fast action of the
maximum power point tracking (MPPT) algorithm to put the system at different

46 Chapter 2: Literature Review
MPP operation also imposes additional difficulties in the task of developing accurate
reliable DC arc-fault detection techniques.
The persistent DC arc-fault is dangerous and poses serious safety and fire
hazard if not extinguished. Moreover, the DC arc-fault can degrade the efficiency of
the PV system. Considering the challenges and safety issues highlighted herein, fault
protection, more so DC arc-fault protection in PV system using fault current
magnitude alone as the actuating signal for the OCFPD will obviously will not
suffice. While various methods have been proposed for DC arc-fault detection in DC
electric circuits in electric vehicles, sea and air crafts, etc. [104],[105],[106], a scope
for development of an accurate, reliable and cost effective generalized DC arc-fault
detection system that can be applicable to all DC electric systems, including PV
systems considering the challenges highlighted exists.
2.4.5 DC Arc Fault Detection Techniques
DC arc fault detection techniques based on DC arc signature characterization
have been proposed in the past. Yao et al. [107] and Telford et al. [108] proposed
different DC arc feature extraction and detection techniques for series DC arc-faults.
The authors in [107] proposed a hybrid technique combining time-domain analysis
for the DC arc chaotic characteristic and discrete wavelet transform (DWT) to
determine the correlation between energy increase and frequency during arcing. And
in [108] the authors proposed a series DC arc-fault diagnosis technique based on a
class of machine learning technique known as hidden Markov model to train the
proposed system using the extracted features of the series DC arc-fault. While these
proposed techniques are well developed, however, their effectiveness in series DC
arc fault detection in PV systems under low irradiance has not been evaluated, and
thus remains inconclusive.
Shimakage et al. [109] and Platon et al. [110] proposed DC side fault detection
by analyzing the measured AC side signal deviation from its estimated value.
Ducange et al. [111] proposed a method for detecting faults in PV modules by
comparing the estimated power and measured power in the faulted PV modules.
Chouder et al. [112], Silvestre et al. [113] and Spataru et al. [114] proposed
techniques to detect different operating conditions of the PV arrays to differentiate
abnormal from normal conditions, including partial shading, MMPT errors as well as
shorted PV modules. A method for comparing energy level of PV systems based on

Chapter 2: Literature Review 47
statistical method was proposed by Vergura et al. [115], while Ando et al. [116] and
Guerrieoro et al. [117] proposed the use of wireless sensors to detect the changing
operating condition of PV system for fault detection. Yi et al. [118] proposed a
technique based on DWT/Fuzzy logic, and Kuo et al. [119] proposed a technique
based on time-domain analysis to determine the correlation between fractional-order
dynamic error and PV power degradation for fault detection under low irradiance in
PV systems. However, DC arc-faults were not considered in both cases, hence their
performance under such fault conditions remain inconclusive. More methods based
on time-domain approach have been proposed by Chae et al. [120], Haeberlin et al
[121], Strobl et al. [122] and Wang et al. [123] to statistically analyse variation in PV
system voltage and/or current signal for arcing fault detection. While all these
proposed methods contribute to advancement in knowledge towards the design and
implementation of suitable protection strategy for DC power system faults more so,
DC arc-faults, their practical implementation and versatility to adapt to changing
operating conditions such as changing irradiance have not been fully evaluated.
2.4.6 DC Arc Models
The research work involved in developing this thesis has involved simulation
of different test conditions. This approach was selected to have flexibility in
analysing different arcing faults under varying environmental conditions such as
changing irradiance. Therefore, to perform DC arc-fault simulation tests as
accurately as possible, developing or selecting an appropriate DC arc model is of
paramount importance.
With DC power systems gaining popularity, the momentum is on the rise to
develop adequate protection scheme for DC systems. Thus, to this effect, proper
modelling of DC arc is essential in analysing DC arc-faults in DC systems including
PV systems. DC Arc-faults when ignited create resistive arc channel with high
resistance that allow enough current to sustain the arc. Thus, there exist a relationship
between voltage and current (V-I) to determine the nonlinearity in DC arc resistance.
Hence, DC arc models have been modelled empirically based on staged tests by
curve fitting technique to determine the nonlinear V-I relationship. A summary of the
common V-I relationships based on the review by Ammarman et al [124] given by
[125], are presented in Table 2.2.

48 Chapter 2: Literature Review
The V-I relations almost resemble each other, where, L is the gap length (which
was taken as an estimate of the arc length), and the A, B, C, D are parameters to be
determined experimentally. Stocks and Oppenlander [126] performed the most
exhaustive tests for free burning series arc in open air and recorded exponentially
decreasing currents from 1000 to 0.1 A. Based on this work, a formula for series DC
arc voltage was derived as given in (2.3).
( ) 1.1220 0.534arc arcV g I= + (2.3)
where g is the gap length given in millimetres, and Iarc is the arc current. Using (2.3)
Ammarman [124] developed a model for calculating the DC arc current using the
model for DC rms steady-state arc resistance in terms of the arc current as given in
(2.4)
( )0.88
20 0.534arc
arc
gR
I
+= (2.4)
where s
arc
s arc
VI
R R=
+
Table 2.2: Common V-I relationships in DC Arc models
Name Equation Experimental condition
Ayrton arc
arc
C DLV A BL
I
+= + + Carbon electrodes
Steinmetz ( )
0.5arc
arc
C L DV A
I
+= +
Carbon and magnetic
electrodes
Nottingham arc n
arc
BV A
I= +
n is related to the electrode
material, L = 0.039 to 0.39 in
Paukert arc b
arc
aV
I=
L = 0.039 to 7.78 in
Iarc = 0.3 to 100 kA
Modified Paukert arc b dL
arc
a cLV
I +
+=
L = 0.04 to 0.12 in
Iarc = 3 to 25 A
In summary, considering these challenges in the reliable detection and
identification of DC arc fault in PV system using fault current magnitude alone as the
actuating signal will obviously will not suffice. There is still a need for development

Chapter 2: Literature Review 49
of an accurate, reliable and cost effective generalized DC arc detection system that
can be applicable to all DC electric systems, including PV systems.
2.5 SUMMARY AND IMPLICATIONS
A summary of the literature reviews and their implications towards addressing
the research questions to achieving the research objectives is presented herein:
2.5.1 Summary
In consideration of the dissimilar voltage and current signal attributes in the
domain of AC and DC voltage signals, a computational technique based on time
domain analysis is determined to be most suitable for developing a fault detection
and diagnostic tool that can be seamlessly applied in both AC and DC power
systems. The functional characteristics of MM to detect insignificant variations in the
topography of the graph of the fault signal makes it suitable for detecting changes in
voltage and current signal due to HIFs and DC arc-faults which are both arcing faults
but in the domain of AC and DC signals.
Radial Distribution Feeder Adaptive OC Protection: The integration of the
RE based DERs at the radial distribution network feeders changes the conventional
distribution network from passive network with unidirectional current flow to active
dynamic network with bidirectional current flow. The preceding discussions on
radial distribution feeder OC protection have shown that, increased RE based DER
penetration results in increased current contribution consequently reducing the fault
current level seen by the OC protection relay thus having the potential to
compromise the effectiveness of the OC protection system coordination. Moreover,
during short circuit faults, the fault current is normally affected by the high
frequency transients as well as the prevalence of the exponentially decaying DC-
offset. While the transients can be effectively filtered by means of low pass filtering,
the DC-offset on the other hand is not so easily removed. Its presence can affect the
fault current magnitude, which the feeder OC protection system is contingent on to
mitigate the damaging effects of short circuit faults and any other conditions
resulting in abnormally large current magnitudes.
The existing relay algorithms in power system protection including distribution
feeder OC protection relays are predominantly based on integral transforms such as
Fourier or Wavelet Transforms to estimate the fault current magnitude. The integrity

50 Chapter 2: Literature Review
of these algorithms can be affected by the DC-offset. Moreover, the existing DC-
offset suppression techniques require filtering that require some form of parameter
estimation which can increase overall time delay in estimating the fault current
magnitude.
Therefore, to overcome these inherent difficulties, a fault detection and
diagnostic tool that does not relay on integral transforms is needed. Furthermore, a
method that does not require any parameter estimation is necessary for the DC-offset
suppression while preserving computational efficiency to reduce fault detection
delay. The method proposed by Rahmati et al. [50] meets this criteria, and will be
adopted in the design and development of the fault detection and diagnostic tool.
High Impedance Fault Detection and Classification in Distribution
Networks: While all the proposed HIF detection and classification methods have
short comings, they contribute to the advancement in knowledge towards
understanding the complex nature of the HIFs. As more research continues,
combination of different techniques and methods could evolve into the development
of a universal system for reliable HIF detection and classification.
Considering the physical characteristics of HIFs, the most common is AC
electric arc. Arcing most often follows the onslaught of HIFs, and it’s the arcing
phenomena combine with among others, parameters such as contact surface material
and weather condition that defines attributes of the HIF fault current. Most, if not all
proposed electrical methods attempt to extract features from the transients present on
the fault current induced by HIF for its classification. The HIF current has time
varying frequency spectrum which makes most frequency-based systems using
Fourier transform (FT) not suitable. Advance techniques using Kalman filters to
estimate the frequency components have been proposed [127]. Amongst the signal
processing techniques, WT/DTW holds the most promise. WT is a time-scaling
technique where both frequency information and point of fault inception are captured
and mapped in time. This makes WT effective in analysing frequency spectrum with
time-varying characteristics [128],[129]. WT based methods target transients induced
by the fault event. Since the transients due to HIF are subject to the damping on the
contact surface material, and if the fault input signals for feature extract are taken at
the distribution network substation, it could result in availability of insignificant
transients which will compromise the effectiveness of WT based methods. Moreover

Chapter 2: Literature Review 51
Ghaderi et al. [52] reports that, despite having significant advantages, WT based
techniques are subject to 1) narrow frequency support, 2) selection of appropriate
mother wavelet, and 3) loss of feature resolution. Thus, despite active research, scope
for the design of a universal HIF detection scheme that combines different signal
processing techniques target different features of the HIF still exists.
The algorithm proposed in this research uses time domain analysis by means of
mathematical morphology to extract features from the HIF current to detect and
classify HIFs based on two HIF identifying characteristics, 1) randomness, due to
randomly changing the effective fault resistance, Rf giving the erratic fault current
and, 2) arc extinguishing and re-ignition around the fundamental period giving a
shoulder shaped unsymmetrical fault current waveform.
Furthermore, the model selection for the HIF detection in time-domain
simulation is the Emanuel arc model. This model, while yet simple captures the HIF
characteristics. Moreover, its simple circuit structure makes it convenient to
implement in MATLAB/Simulink which is the simulation environment of choice in
this research. Furthermore, different contact surfaces can be modelled by
appropriately setting the values of the parallel resistance in the model.
DC Arc-Fault Detection in Photovoltaic Systems: Considering the challenges
highlighted from the literature review, fault protection, more so DC arc fault
protection in PV system using fault current magnitude alone as the actuating signal
will obviously not suffice. While various methods have been proposed for DC arc-
fault detection in DC electric circuits in electric vehicles, sea and air crafts, a scope
for development of an accurate, reliable and cost effective generalized DC arc
detection system that can be applicable to all DC electric systems, including PV
systems considering the challenges highlighted exists. A DC arc-fault detection
technique based on time domain analysis using mathematical morphology is
proposed. Moreover, the choice of DC arc-fault model for generating arc current in
the simulation is that proposed by Ammarman as wide range of DC arc current can
be simulated.
2.5.2 Implications
The desired research outcome is to develop a universal fault detection and
diagnostic tool that can be utilised in distribution feeder adaptive OC protection as
well as having the ability to detect HIF based on feature extraction. Moreover, the

52 Chapter 2: Literature Review
fault detection and diagnostic tool must have the flexibility to be easily customised
for application in DC arc-fault detection in PV system without requiring major
changes. In fault detection and diagnostic systems, the primary input signal quantities
are normally current and voltage. AC and DC voltages and current do not exhibit the
same attributes, thus a signal processing technique that can be utilised in capturing
fault information in the domain of both AC and DC signals is desired. A time domain
analysis-based fault detection and diagnostic tool based on Mathematical
Morphology is proposed. A review of the proposed application of MM based
techniques in power system fault detection and condition monitoring is provided to
show that it is maturing technique and can be utilised as an alternative to the
traditional methods for power system fault detection and diagnosis.
2.5.3 Application of MM in Detection and Diagnosis of Power System
Conditions
Mathematical Morphology is a powerful nonlinear image and signal technique
that is based on set theory and lattice algebra. It was introduced by two French
researchers; Georges Matheron and Jean Serra in the mid-1960s to facilitate studies
of mineral deposits by characterizing physical properties of different minerals by
analyzing their geometrical structures [130, 131]. Since then, MM has found
applications in diverse arears such as; manufacturing system quality control,
computer graphics, medical imaging, etc. The nonlinear characteristics of MM
transforms have been used to process certain types of noise in images. These have
been applied in developing nonlinear filters where they are used in analysing the
geometrical shapes, surfaces and forms of objects.
Considering that power system signals can be viewed as one-dimensional
images whose information is contained in their graphs laid out in the Cartesian
coordinate or Euclidean space, then MM techniques can be used to extract such
information. Hence, in recent times, MM based tools and algorithms for power
system fault detection and diagnostics are being proposed considering MM’s ability
to extract features from any image or signal that are corrupted or embedded in white
noise [132],[133]. Moreover, MM is more attractive considering the computational
burden imposed by MM is lower than traditional techniques due to simple
mathematical operations such as additions and subtractions [134].

Chapter 2: Literature Review 53
From the literature, it was found that, several MM based tools and techniques
have been proposed for power system condition monitoring and fault detection.
These include tools for monitoring and detection of power quality events [132],[133].
Other tools and methods for detecting power system disturbances were also proposed
by authors in [134],[135],[136],[137]. MM based tool for harmonic assessment was
proposed by [138] while several authors including those in [139],[140],[141]
proposed techniques for detection of CT saturation. Further MM based tools for
power transformer fault diagnosis were proposed by [142],[143]. MM based
techniques for transmission line protection were proposed by [144],[145],[146]
while authors in [147],[148] proposed MM based digital relaying.
Gautam and Brahma [78] proposed the CODO algorithm for HIF detection
where Open and Close MM filters are used to produce an output for extracting the
randomness feature of HIF. The CODO output, designated yCODO is created by taking
the arithmetic difference of the Close and Open MM operations using a three point
flat SE, g such that yCODO = (f ●g)(n) - (f ○g)(n). This algorithm generates spikes with
heights relative to the slope of the transients during faults. As previously mentioned,
the algorithm is limited to detecting the transients occurring only at or near the
positive and negative peaks. As the rate of appearance of transients depends on the
rate of change of the effective HIF impedance which is highly random, there is no
guarantee that transients will occur at those points on the input signal and hence
jeopardizing the robustness of the algorithm. Moreover, since the algorithm depends
on slope detection, this means presence of noise will cause spikes in the output of the
algorithm which can be easily confused with HIF. While a noise threshold of 15%
above the prefault value was used for HIF randomness feature extraction, no actual
noise conditions are simulated to test the CODO algorithm under such conditions.
Thus, it is obvious the application of mathematical morphology in power
systems condition monitoring as well as fault detection is becoming significant. In
this research, MM technique is utilised as the computational technique for
developing a fault detection and diagnostic tool based on time domain analysis fault
detection and diagnosis in both AC and DC power systems.

54 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
Chapter 3: Designing the Multistage MM
Arc Fault Detection Algorithm
3.1 INTRODUCTION
MM is a non-linear image/signal processing technique based on lattice algebra
and set theory that decomposes the geometrical features of the image or signal
waveform to extract hidden characteristics. MM is concerned with the shape of the
signal in complete time domain and is capable of extracting features from any image
or signal by means of a probing or filtering signal called the structuring element
(SE). The fault detection and diagnostic tool developed through this research is a
multistage Morphological filter, constructed from two nonlinear MM filters called
the morphological median filter (MMF) and the Alternating Sequential Filters (ASF)
called the decomposed open-closed alternating sequence (DOCAS) morphological
fault detector. The DOCAS algorithm is enhanced by an eccentrically decreasing
weighted SE that gives it the functional attributes to detect seemingly insignificant
changes in the topography of the signal waveform. This and other unique features of
the MM techniques are utilised by the DOCAS algorithm for application in feeder
OC protection, HIF feature extraction and classification in HIF detection as well as
DC arc-fault detection in PV systems.
This chapter is organised as follows: Section 3.2 discusses the research
methodology; section 3.3 discusses the mathematical fundamentals of the MM signal
processing technique; section 3.4 discusses the design of the fault detector algorithm
and its mathematical derivation and section 3.5 discuss the characteristics of the
algorithm and its application in the detection of power system disturbances. In
section 3.6 the conclusion is presented.
3.2 RESEARCH METHODOLOGY UTILIZING THE MM TECHNIQUE
The research methodology presented herein defines the overall design of the
research, and the way the research has been conducted to answer research questions
in achieving the research aims and objectives.
In designing the fault detection and diagnostic tool, various features and
functional attributes of the MM signal processing technique have been investigated

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 55
for their application to give the following characteristic to the fault detection and
diagnostic algorithm;
- Fault detection by means of sudden change in fault current magnitude using
displacement of the current magnitude from its prefault level.
- Integrate the functionality for suppression of the exponentially decaying
DC offset through the natural process of fault detection without parameter
estimation.
- HIF detection based on slope detection aiming two features of the HIFs
including, randomness and arc extinction and re-ignition
- DC arc-fault detection using slope detection (rate of change) of the chaotic
DC arc phenomena.
The functional attributes of the algorithm have been verified through
simulations of different fault conditions, including distribution feeder overcurrent
fault, high impedance fault and DC arc-faults on photovoltaic systems under low
irradiance levels.
The fault detection and diagnostic tool has been developed using the MATLAB
software. The simulation models, including High Impedance fault model and DC arc
model have also been implemented in MATLAB/Simulink. Moreover, all test beds
for the simulations including distribution feeder for overcurrent fault simulations as
well as the IEEE 13 bus test feeder and photovoltaic systems with interfacing
technology have been developed and implemented in MATLAB/Simulink.
3.3 BACKGROUND OF MM BASED TECHNIQUES
The MM method was primarily used in image processing; however, a class of
MM, known as Gray-scale morphology was developed for signal processing [149,
150] where morphological dilation and erosion are performed on the signal by a
structuring element(SE) which is also a signal by algebraic addition and subtraction
as opposed to union and intersection in the case of binary morphology . A signal can
be considered as a one-dimensional (1-D) image, whose information is contained in
its graph. The genesis of all MM filters is two primitive MM transforms called
“Dilation” and “Erosion”. In MM processing of analogue signals, gray-scale dilation
and erosion are applied. All other MM transforms and filters are derived from the
dilation and erosion transforms. The following propositions can be applied in

56 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
computing grayscale dilation and erosion. Let I{x1,x2, x3… xX} be the domain of the
signal i(x) where X is the total number of samples and G{p1,p2,p3…pP} be the domain
of the structuring element (SE) g(p) where P is the total number of points of the SE.
The SE can be a subset of i(x) such that P ≤ X, represented by points on the
Euclidean space or the Cartesian grid. The dilation and erosion transformation of the
signal i(x) by the structuring element g(p) are respectively defined in subsections
3.3.1 and 3.1.2.
3.3.1 Gray-Scale Dilation
The gray-scale dilation is obtained by algebraic addition defined by (3.1)
[149],[150]
( ) ( ) ( )
( )
( ) max
0 , 0
Gp
iDI i g x i x p g p
x p x p
= = − +
−
(3.1)
where iDIG is the new finite set formed by the dilation operation on the fault
signal i(x) by the SE g(p). The set iDIG contains the maximum selection of a set of
sums within the neighbourhood of the points around the origin of the SE g. The
process defined by (3.1) involves spatial translation of the signal i(x) by each point of
g(p) then offset by the value of g at point p [151]. Then the dilated signal iDIG is the
pointwise maximum selection of the translated and offset version of the original
signal i(x). The sequence of operation in the dilation transform can be demonstrated
by considering an illustrative example.
Supposing the signal i(x) to be dilated by a SE has 6 points represented on the
Cartesian coordinate with values such that i = [0, 0.1, 0.2, 0.3, 0.2, 0.1]. The SE g
has 3 points with origin at the center, such that the points are p = (-1, 0, 1) with
values of g at these points being g = [0.1, 0, 0.1]. Application of (3.1) involves a
pointwise maximum of three signals.
Let h(p) be a 1 by X matrix to hold the value of i(x) offset by g at each point p.
The result of the addition in the dilation operation on the signal i(x) by values of g at
each point p is held in the h(p) matrix as illustrated below.
( ) ( )1( ) ( 1) 1,.....,h i x g x X
− = + − =
( ) ( ) ( ) ( ) ( ) ( )
( 1)h 0 + 0.1 , 0.1 + 0.1 , 0.2+ 0.1 , 0.3 0.1 , 0.2 0.1 , 0.1 0.1
0.1, 0.2, 0.3, 0.4, 0.3, 0.2
− = + + +
=

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 57
( ) ( )0( ) (0) 1,.....,h i x g x X = + =
( ) ( ) ( ) ( ) ( ) ( )
(0) 0 + 0 , 0.1+ 0 , 0.2 + 0 0.3 0 0.2 0 0.1 0
0 0.1 0.2 0.3 0.2 0.1
h = + + +
=
( ) ( )1( ) (1) 1,.....,h i x g x X = + =
( ) ( ) ( ) ( ) ( ) ( )
(1) 0 + 0.1 , 0.1 + 0.1 , 0.2 + 0.1 , 0.3 0.1 , 0.2 0.1 , 0.1 0.1
0.1, 0.2, 0.3, 0.4, 0.3, 0.2
h = + + +
=
The results in the h(p) matrices can be placed in another matrix denoted as H. To
account for the effect of translation by each point of g(p), the signals h(-1), h(0) and h(1)
must be translated as shown in the H matrix. The negative infinity (-∞) is used in
dilation and meaning that the signal is undefined at that point.
1 1
0 1
1 1
H
X
X
X P X
h
h
h
−
− −
= − − − −
0.1 0.2 0.3 0.4 0.3 0.2
H 0 0.1 0.2 0.3 0.2 0.1
0.1 0.2 0.3 0.4 0.3 0.2
− −
= − − − −
The signal iDIG is formed by selecting the maximum value in each column in H as
shown below.
iDIG(1): max(H11, H21, H31) = max(0, -∞,-∞) = 0
iDIG(2): max(H12, H22, H32) = max(0.2, 0, -∞) = 0.2
iDIG(3): max(H13, H23, H33) = max(0.3, 0.1, 0.1) = 0.3
iDIG(4): max(H14, H24, H34) = max(0.4, 0.2, 0.2) = 0.4
iDIG(5): max(H15, H25, H35) = max(0.3, 0.3, 0.3) = 0.3
iDIG(6): max(H16, H26, H36) = max(0.2, 0.2, 0.4) = 0.4
iDIG(7): max(H17, H27, H37) = max(-∞, 0.1, 0.3) = 0.3
iDIG( 8): max(H18, H28, H38) = max(-∞, -∞, 0.2) = 0.2
0,0.2,0.3, 0.4, 0.3, 0.4, 0.3,0.2GiDI =

58 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
The domain of the dilated signal has been expanded due to the translation of the
signal i by –p for each point p on g in order to have the center of g under the signal i
[151]. Thus, any point on the domain of the SE that is not under the signal is
undefined. Therefore, the first and the last elements of the matrix iDIG are undefined
and denoted not applicable (NA).
,0.2,0.3, 0.4, 0.3, 0.4, 0.3,GiDI NA NA=
3.3.2 Gray-scale Erosion
Similarly, the gray-scale erosion of the fault signal i(x) by the g(p) is obtained
by algebraic subtraction defined in (3.2) [149],[150]
( ) ( ) ( ) ( ) min
0 ( ) , 0
Gp
iER i g x i x p g p
x p x p
= = + −
+
(3.2)
where iERG is the new finite set formed by the erosion transform using the
minimum selection of a set of differences within the neighbourhood of the points
around the origin of the structuring element, g. The sequence of operation in the
erosion transform can be demonstrated by considering an illustrative example.
The operation of the erosion transform can be demonstrated by considering the
same illustrative example previously used. The signal i(x) used previously is to be
eroded by the same SE, g. Application of (3.2) involves a pointwise minimum of
three signals.
The h(p) matrices and their contents are defined for the erosion process herein.
The result of the subtraction in the erosion operation on the signal i(x) by values of g
at each point p is held in the h(p) matrix as illustrated below.
( ) ( )1( ) ( 1) 1,.....,h i x g x X
− = − − =
( ) ( ) ( ) ( ) ( ) ( )
( 1)h 0 - 0.1 , 0.1 - 0.1 , 0.2- 0.1 , 0.3 0.1 , 0.2 0.1 , 0.1 0.1
-0.1, 0, 0.1, 0.2, 0.1, 0
− = − − −
=
( ) ( )0( ) (0) 1,.....,h i x g x X = − =
( ) ( ) ( ) ( ) ( ) ( )
(0) 0 - 0 , 0.1- 0 , 0.2 - 0 , 0.3 0 , 0.2 0 , 0.1 0
0 0.1 0.2 0.3 0.2 0.1
h = − − −
=
( ) ( )1( ) (1) 1,.....,h i x g x X = − =

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 59
( ) ( ) ( ) ( ) ( ) ( )
(1)h 0 - 0.1 , 0.1 - 0.1 , 0.2 - 0.1 , 0.3 0.1 , 0.2 0.1 , 0.1 0.1
-0.1, 0, 0.1, 0.2, 0.1, 0
= − − −
=
The results in the h(p) matrices can be placed in H as previously defined. To account
for the effect of translation by each point of g(p), the signals h(-1), h(0) and h(1) must be
translated as shown in the H matrix. The positive infinity (∞) is used in erosion to
represent points where signal is undefined.
1 1
0 1
1 1
H
X
X
X P X
h
h
h
−
=
-0.1 0 0.1 0.2 0.1 0
H 0 0.1 0.2 0.3 0.2 0.1
-0.1 0 0.1 0.2 0.1 0
=
The eroded value of i(x) results from the minimum selection of each column in the H
matrix. Let iERG be a 1 by X finite set containing the minimum selection of columns
of H. The minimum selection of the valid columns of the H matrix is shown below.
iERG(1): min(H11, H21, H31) = min(-0.1, ∞,∞) = -0.1
iERG(2): min(H12, H22, H32) = min(0, 0, ∞) = 0
iERG(3): min(H13, H23, H33) = min(0.1, 0.1, -0.1) = -0.1
iERG(4): min(H14, H24, H34) = min(0.2, 0.2, 0) = 0
iERG(5): min(H15, H25, H35) = min(0.1, 0.3, 0.1) = 0.1
iERG(6): min(H16, H26, H36) = min(0, 0.2, 0.2) = 0
iERG(7): min(H17, H27, H37) = min(∞, 0.1, 0.1) = 0.1
iERG( 8): min(H18, H28, H38) = min(∞, ∞, 0) = 0
0.1,0, 0.1,0,0.1,0,0.1,0GiER = − −
The reclassified iERG considering the effect of translating the SE is as given below.
,0, 0.1,0,0.1,0,0.1,GiER NA NA= −

60 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
3.3.3 Physical Effect of Dilation and Erosion Transforms
Dilation causes each point on the signal i(x) to increase in size while erosion
causes each point to shrink [132]. The effect of dilation transform is such that it
causes each point on the signal under consideration to grow (dilate) in size thereby
potentially filling the hole in dents on the graph of the signal. This characteristic is
very useful in noise removal and enhancement of the signal for the detection of any
abnormalities. The erosion operation is achieved by pointwise operation on the input
signal by the SE and the minimum of the difference of the local region of the signal
to which the SE operates on is taken. The effect of the erosion operation results in the
shrinking of the points to which the SE operates. The physical effects of the Dilation
and Erosion operations can be observed by a graphical demonstration on the example
set plot generated using MATLAB given in Figure 3.1(a) and (b) respectively.
Figure 3.1: Physical effect of (a) dilation and (b) erosion
3.3.4 Opening and Closing Transforms
The dilation and erosion are dual transforms. However, despite their duality,
the action of one transform cannot be recovered by directly applying the other
transform. That is, result obtained by first eroding a signal then dilating it will not be
the same as dilating it first then eroding it. The order in which the dilation and
erosion are applied in combination constitutes two new MM transforms, namely the
open and the close transforms. The open and close transforms are symbolised by ○
and ● symbolic operators respectively. Thus, the gray-scale opening and closing of
the signal i by SE g, denoted (i ○g) and (i ●g) respectively are defined by equations
(3.3) and (3.4), [152]
( ) ( ) ( ) ( )( ) max min ( ) ( )pp
i g i g g i x p g p x p g p= = + − − + (3.3)

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 61
( ) ( ) ( ) ( )( ) min max ( ) ( )p p
i g i g g i x p g p x p g p• = = − + + − (3.4)
As can be seen in (3.3), opening transform is the dilation of the erosion of the
signal i by the same SE g, and in (3.4), the closing transform is the erosion of the
dilation of the signal i by the structuring element g. The opening and closing
transforms are also dual transforms, where the opening action results in the reduction
of small positive regions within the signal, whilst the closing action will result in the
reduction of small negative regions within the signal. Furthermore, the opening and
closing transforms allow for the recovery of features of the signal lost due to the
erosion and dilation operations respectively, thus providing the characteristics
necessary for feature extraction [133].
The physical effect of opening and closing transforms are graphically
illustrated in Figures 3.2(a) and (b) respectively by considering the same fault current
i(x) and the structuring element g(p). The opening and closing transforms provide the
building block for the construction of two fundamental nonlinear morphological
filters called, Closing-opening and Opening-closing filters. These filters when
connected in cascade and operated simultaneously with the same SE can be very
effective in eliminating positive and negative impulse noise in the signal. These
properties of mathematical morphological transforms and filters can be exploited by
uniquely combining them to develop morphological fault detection and identification
algorithm which is fast, robust and reliable.
Figure 3.2: Physical effect of (a) opening and (b) closing transforms
3.3.5 Morphological Filters
Different classes and types of filters, depending on the application and
requirements can be derived through strategic combination of the basic MM
transforms. Two types of MM filters utilised in the design of the proposed power
system fault detection and classification algorithm are the morphological median

62 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
filter (MMF) and the alternative sequential filter (ASF). Thus, discussion of these
filters including mathematical description and graphical illustration of the signal
transformation by these filters is presented here.
Morphological Median Filters: The MMF is an averaging filter, where a new
intermediate finite average set can be achieved by taking the average of simultaneous
dilation and erosion of the target signal by the same SE. Considering the signal i(x)
and its dilation and erosion by the structuring element, g(p), as defined in (3.1) and
(3.2) respectively, and assuming the two primitive transforms are configured for
MMF operation, the average MMF output denoted AvMMF is given by (3.5) [150].
( )( ) ( )( )2 2
G GMMF
i g x i g xiDI iERAv
+ += = (3.5)
Alternating Sequential Filters: Alternating sequential filters (ASFs) in MM
are a combination of iterative morphological filters with increasing size of SEs. They
offer a hierarchical structure for extracting geometrical structure for extracting
characteristics of objects. The ASFs consist of iterative operations of opening and
closings with SEs of increasing sizes. Suppose g1(v) and g2(u) such that v > u are two
SEs. Consider the case of open-close ASF where the sequential transformation of the
signal i(x) by g1(v) and g2(u) is defined by (3.6) [149]
( )( )( )1 1 2 2ASFOC f g g g g= • • (3.6)
where OCASF is the output of the open-close alternating sequential filter.
Similarly, in the close-open ASF where the sequential transformation of the signal
i(x) by g1(v) and g2(u) is defined by (3.7) [149]
( )( )( )1 1 2 2ASFCO f g g g g= • • (3.7)
where COASF is the output of the close-open alternating sequential filter.
The ASFs offer a method to extracting image features hierarchically. The
features can be divided into different layers according to their corresponding SE
sizes. The features, such as distribution of each layer can be used in many
applications; for example, feature classification and recognition.

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 63
3.4 DESIGN OF THE MORPHOLOGICAL ALGORITHM FOR POWER
SYSTEM FAULT DETECTION
The fault detection and classification technique presented in this thesis proposes
to use voltage and current signals measured at the distribution feeder substation. The
measured voltage and current signals provide inputs to the HIF detection and
classification algorithm centrally located at the substation. The occurrence/existence
of faults is detected by continuously monitoring and analysing the extracted voltage
and current signals for changes in current and/or voltage magnitude.
In the proposed algorithm, two MM filters, namely MMF and ASF are
strategically combined, and with the use of the designed SE, create a MFD signal
output from the input fault signal quantities for fault detection. The mathematical
derivations for the entire signal processing technique in creating the MFD output is
described herein.
3.4.1 Input Signal
The input signals to the DOCAS algorithm are the fault current and voltage
signals measured at the distribution feeder substation. These signals can be
represented by a generalised sinusoidal waveform with exponentially decaying DC-
component given by (3.8);
( ) −++=−
tFeFtf
t
sin)( 10 (3.8)
where Foe-t/τ and F1sin(ωt + α – θ) are the DC and AC components respectively.
3.4.2 Sampling
A sampling frequency of 1.92 kHz suitable for real-time application [78] in the
detection of power system disturbances is applied in sampling the signal. It has been
further suggested that two times recommended sampling frequency could be used.
Thus, considering 64 samples per fundamental cycle in the design, a sampling
frequency of fs= 3200 Hz for 50 Hz system is used. All designed parameters
presented herein and thereafter will refer to 50 Hz system; however, values can be
recalculated by interchanging the frequency for 60 Hz system. Considering the
number of samples, and using (3.9) [153] , the sampling rate used in the design is
312.5 µs.

64 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
sN
TT 0= (3.9)
where ΔT is the sampling rate, T0 = 1/f0 = 1/50 = 0.2s is the period of the
fundamental cycle, and Ns = 64 is the number of samples in a fundamental cycle. A
sampling function consisting of string impulses defined as δ(t - nΔT) 6 n=-∞,…,+∞
being the number of samples is used to sample the fault signal in (3.8). The sampled
fault signal waveform can be seen as a time function, consisting of uniformly spaced
impulses, each with a magnitude f(nΔT) as given in (3.10).
( ) ( )TntTnftfn
−=
−=
)(' (3.10)
The signal can be written as sampled signal for a fundamental cycle as given in
(3.11);
( ) 0 1 sin 0,....., 1nf n F r F n n NN
= + + − = −
(3.11)
where r = e-(∆T/τ), and the first and second terms are the DC and the AC components
respectively [153]
( ) ( ) )()()()(1
0
TwtTwftwttftfW
w
w −== −
=
(3.12)
where fw(t) is the fault signal window. The wth sample in the data window can be
represented (3.13);
( ) −++= TkFeFkf Tk
w sin)( 10 (3.13)
The first and the last sample in the data window are at position k = 0 and k = N-1.
These samples define the beginning and the end of the data window. Each data
window is separated by ∆T. The data window can be written as in (3.14);
( ) 0 1 sin 0,....., 1nf n F r F n n NN
= + + − = −
(3.14)
Therefore, let F{n1 n2 n3…….nN} represent a window in the domain of the fault signal
f(n) to be processed by the MFD algorithm at each natural time step.
3.4.3 Design of Structuring Element
The design and/or selection of an optimum SE is fundamental to the MM
algorithm in enhancing its effectiveness in extracting fault signal characteristics

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 65
necessary for the secure and reliable detection and classification of power system
faults. Observing all the MMF equations from (3.1) to (3.7) it is obvious that the SE
is very crucial to the transformation of the target fault signal in achieving the desired
outcome. There are several factors, including the nature of signal under
consideration, its harmonic content and rate of sampling used in processing the signal
that influence the design and structure of the SE [132],[134].
While no specific guideline exists for selection of SE, it is noted that SEs of
different geometrical shape such as line, square, disk or ball-shaped and others
including bee line, curve, triangle have been used in different applications [150]. In
fault power system fault detection, the power systems signals (voltage and current)
are sinusoidal, and one-dimensional, thus the popular choice of SE has been the flat
linear structure. Flat SEs with different lengths and constant values have been
applied in different MM based filters proposed by various researchers including
those in [134],[142],[143],[145],[146],[154],[155],[156],[152] for the detection and
analysis of various power systems conditions and faults. However, Shih [149]
implies that, the use of flat SE in some situation may produce ambiguous results.
While it is observed that no specific guideline exists for the selection of appropriate
geometry and size of the SE, Gautam and Brahma [157] have done detailed analysis
for the selection of optimal SE. Based on this guideline, and in view of [149],
general structure of the SE used in the DOCAS algorithm that captures the variation
in faults signal inputs is defined by (3.15) [150];
mmmmmg cos)1cos(.....cos1cos....)1cos(cos)( −−= (3.15)
where m is the number of points in the SE; ϕ is the phase angle (ϕ = 2ᴫf0∆T); f0
is fundamental frequency and ∆T is the sampling interval. Note that, points of the
grayscale SE denoted p in (3.1) and (3.2) and all MM operation thereafter is replaced
by m in (3.15), and the reason will become obvious in the proceeding section.
Decomposition of Structuring Element: While the general SE as given in
(3.15) could be used in its entirety, it is not computationally efficient to do so as the
same result can still be archived with a smaller SE with less number of points. In the
overall design of the algorithm, a sampling frequency of 3.2 kHz to get 64 samples at
a sampling rate of ∆T = 312.5μs per fundamental in 50 Hz was used. Considering
that the 64 samples are segmented into data windows of 16 samples, the SE can have
points (or size) up to 16. However, more sampling points will increase computational

66 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
time resulting in increased fault delay. Moreover, the basic rule is that, the SE can be
a subset of the signal under consideration such that n > m, where n and m are number
of points on the signal and the SE respectively. Thus, considering the sampling rates
used, and in the interest of maintaining computational efficiency, a SE of up to 5
elements is adequate for real-time detection of power system faults. Thus, a 5 point
SE can be derived form (3.15) using m = (2n + 1) n =0,1,2 [150], such that m = 1
being the center point. Points m = 3 and m = 5 are located on both sides resulting in
an eccentrically decreasing convex geometrical shape with unequal slopes.
cos3 cos 1 cos cos3g = (3.16)
The designed sampling interval and fundamental frequency results in a
weighted eccentrically decreasing convex SE with points, g = [0.957, 0.995, 1,
0.995, 0.957]. Considering the geometrical shape of the SE in (3.16), there are two
unequal line segments with unequal slopes as shown in Figure.3.3. Further
enhancement to the SE is done by decomposition of the convex structure [158]. The
SE is decomposed, into two linearly sloped SEs with 3 elements defined as A1 =
[cos1ϕ, 1, cos1ϕ] and A2 = [cos3ϕ, 1, cos3ϕ] and having slopes s1 = 1 – cos1ϕ
and s2 = cos1ϕ – cos3ϕ, respectively such that s2 < s1. A1 and A2 are used in MMF
stages of the proposed algorithm, and must be sequentially applied such that A1 is
dilated and eroded by A2 to cover the length of the SE [149] . Further two SEs
designated B1 and B2, where B2 > B1 are composed with n = 2 for B2 = [cos3ϕ,
cos1ϕ, 1 cos1ϕ, cos3ϕ] and n = 1 for B1 = [cos1ϕ, 1, cos1ϕ] and used in the ASF
layers.
Figure 3.3: Eccentrically decreasing convex structuring element.

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 67
3.4.4 Weighted Morphological Signal Transformation
The geometry of the SE and its decomposition allows for weighted MM
transformation. Weighted morphological dilation and erosion of an input signal f(n)
by a weighted structuring element g(m) are defined by (3.17) and (3.18) respectively
[150].
( ) ( ) ( ) ( ) max /wm
DI f g m f n m g m= = − (3.17)
( ) ( ) ( ) ( ) min /wm
ER f g m f n m g m= = + (3.18)
Weighted morphological transform is implied for all MM operations applied
hereafter.
3.4.5 Processing the Morphological Fault Detector Signal
The mathematical derivations for the entire signal processing technique in
creating the MFD output is described herein. The sampled version of the fault signal
in (2) is processed as a sliding window with each window separated by ΔT. The fault
signal is processed by the respective filters in the sequence described and in
conjunction with the SEs defined.
Decomposed Morphological Median Filter: The decomposition of the SE into
A1 and A2 gives rise to two stages of MMF in the DOCAS algorithm called MMF-
Stage 1 and MMF-Stage 2 where A1 and A2 used respectively; such that the output of
stage 1 is cascaded to stage 2. To achieve the total dilation and erosion operations as
would have been over the range of the overall SE, the signal to be transformed must
be sequentially dilated and eroded by the decomposed elements [149]. The output of
the previous operation by the first component, A1 must be cascaded to the next
component, A2 giving the desired morphological transformation more efficiently.
The mathematical derivations in the signal transformation at the MMF stages
are described in herein.
MMF-Stage 1: The dilation and erosion of original fault signal for a data
window segment, f(n) by A1 are given by (3.19) and (3.20) respectively.
( ) ( ) 1 1 1, 1,max / 1,2,3m mm
DI f A f n a a m= = − = (3.19)
( ) ( ) 1 1 1, 1,min / 1,2,3m mm
ER f A f n a a m= = + = (3.20)

68 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
where DI1 and ER1 are defined as intermediate sets created by the dilation and
erosion process in MMF-Stage 1, and these are cascaded to the MMF-Stage 2 where
they are simultaneously dilated and eroded to create the final sets denoted DI2 and
ER2 respectively, and defined by (3.21) and (3.22)
MMF-Stage 2: The outputs of MMF-Stage 1 are dilated and eroded by A2 in
Stage 2 as defined by (3.21) and (3.22) respectively.
( ) ( ) 3,2,1/max ,2,21212 =−== maanDIAAfDI mmm
(3.21)
( ) ( ) 3,2,1/min ,1,21212 =+== maanERAAfER mmm
(3.22)
where DI1 and DI2 contain maximum selections of sets of sums from dilation
operation while ER1 and ER2 contain the minimum selections of set of differences
from erosion operation within the neighbourhood A1 and A2 in stage 1 and 2 of the
decomposed MMF respectively. The processed signal can be reconstructed by taking
the average output of the decomposed MMF as defined by (3.23);
++
+=
222
1 2211 ERDIERDIAvMMF (3.23)
where (DI1 + ER1)/2 and (DI2 + ER2)/2 are the average outputs of MMF-Stage 1 and
MMF-Stage 2 respectively. Equation (3.23) represents the magnitude transformation
of the original fault signal. Let fmmf (n) denote the transformed version of f(n) given
by (3.24);
( ) 0 1sin 0,....., 1
n
mmf mmf mmff n F r F n n N
N
= + + − = −
(3.24)
where F0mmf and F1mmf are the dc and ac components of the MMF average output
respectively.
The DOCAS algorithm is based on slope detection to generate spikes in
response to variation in the topography of the fault signal waveform caused by the
fault. The distortion of the signal waveform from the transients following a fault are
emphasised by subtracting fmmf (n), (3.24) from the original fault input signal, f(n)
(3.16) to produce the initial fault detection signal given in (3.25);
++=
−
=
nN
FrFnfN
n
n sin)(1
1
10 (3.25)

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 69
Alternating Sequential Filters: The ASF subsystem has two layers, the Open-
close ASF layer and the Close-open ASF layer, considered as Layer 1 and Layer 2
respectively. Each layer of the ASF subsystem has four stages whose outputs are
denoted OCs and COs where s defines a stage such that s∀=1,..,4. The cascaded
signal is simultaneously transformed by the same SE each stage of the ASF layers as
described in the subsequent subsections. The SEs used at the ASF layers are B1(u) ∀
u=1,2,3 and B2(υ) ∀ υ= 1,2,3,4,5 such that B2 > B1.
Open-close Alternating Sequential Filter: The four stages of the Open-close
ASF layers are denoted OCASF-Stage 1,..,OCASF-Stage 4 with outputs respectively
defined as OC1..OC4. The output of the upstream stage is cascaded to the
downstream stage where the outputs of the upstream and downstream stages can be
respectively defined as OCs and OCs+1 where 𝑠=1,.3. The mathematical derivation of
the Open-close ASF layer is described herein.
( )( )( )( )2 2 1 1( ( ) ( ) 1,...,5 and 1,.,3
ASFOC f B B B u B u = • • = =
(3.26)
where OCASF is the entire sequential transformation covering the four stages. A stage
is defined by a closing (●) and (○) operator in each ASF layer. Thus, each stage of
the Open-close ASF layer can be elaborated as follows;
OCASF-Stage 1:
( )
( ) ( )( )
1 2
2 2
( ) ( )
max min / ( ) / ( ) 1,..,5
OC n f B
f n B n B
=
= + − =
(3.27)
OCASF-Stage 2:
( )( )
( ) ( )( )
2 2 2
1 2 2
( ) ( )
min max / ( ) / ( ) 1,..,5
OC n f B B
OC n B n B
= •
= − + =
(3.28)
OCASF-Stage 3:
( )( )( )
( ) ( )( )
3 2 2 1
2 1 1
( ) ( ) ( )
max min / ( ) / ( ) 1,.,3
OC n f B B B u
OC n u B u n u B u u
= •
= + − =
(3.29)
OCASF-Stage 4:

70 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
( )( )( )( )
( ) ( )( )
4 2 2 1 1
3 1 1
( ) ( ) ( )
min max / ( ) / ( ) 1,.,3
OC n f B B B B u
OC n u B u n u B u u
= • •
= − + =
(3.30)
Close-open Alternating Sequential Filter: Similarly, the four stages of the
Close-open ASF layers are denoted COASF-Stage 1,..,COASF-Stage 4 with outputs
respectively defined as CO1..CO4. The output of the upstream stage is cascaded to
the downstream stage where the outputs of the upstream and downstream stages can
be respectively defined as COs and COs+1 where 𝑠=1,.3. The mathematical derivation
of the Close-open ASF layer is described herein.
( )( )( )( )2 2 1 1( ( ) ( ) 1,...,5 and 1,.,3
ASFCO f B B B u B u = • • = =
(3.31)
where COASF is the entire sequential transformation covering the four stages. A
stage has been previously defined is denoted by a closing (●) and (○) operator. The
signal transformation at each stage is thus described as follows;
COASF-Stage 1:
( )
( ) ( )( )
1 2
2 2
( ) ( )
min max / ( ) / ( ) 1,..,5
CO n f B
f n B n B
= •
= − + =
(3.32)
COASF-Stage 2:
( )( )
( ) ( )( )
2 2 2
1 2 2
( ) ( )
max min / ( ) / ( ) 1,..,5
CO n f B B
CO n B n B
= •
= + − =
(3.33)
COASF-Stage 3:
( )( )( )
( ) ( )( )
3 2 2 1
2 1 1
( ) ( ) ( )
min max / ( ) / ( ) 1,.,3
CO n f B B B u
CO n u B u n u B u u
= • •
= − + =
(3.34)
COASF-Stage 4:
( )( )( )( )
( ) ( )( )
4 2 2 1 1
3 1 1
( ) ( ) ( )
max min / ( ) / ( ) 1,.,3
CO n f B B B B u
CO n u B u n u B u u
= • •
= + − =
(3.35)

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 71
Morphological Fault Detector Output Signal: The MFD output signal is the
sum of difference between the sequential close and open transformations at each
layer of the ASF. Each layer has two sequential close and open transformations.
Let’s denote MFD1 as the difference between the close operation in COASF-Stage 1
and open operation OCASF-Stage 1; such that MFD1 = (CO1 - OC1). Similarly, MFD2
= (OC2 - CO2), MFD3 = (CO3 - OC3), and MFD4 = (OC4 - CO4). The MFD output is
then defined by (3.36);
4
1
s
s
MFD MFD=
= (3.36)
3.5 ATTRIBUTES OF THE DOCAS ALGORITHM
The entire signal transformation process to create the MFD output can be
graphically illustrated by considering a simple AC signal. Moreover, the attributes of
the MFD output and its application fault detection and classification are presented
herein.
3.5.1 DOCAS Response to Simple AC Signal
A pure sinusoidal signal at 50Hz fundamental frequency, of which the
normalized version shown in Figure 3.4 (a) was sampled at ∆T = 312.5μs and
segmented into data windows of 16 samples were passed through the DOCAS
algorithm. Domain of a signal data window is defined as fw= [k0, k1,…,kN-1] ∀ k =
0,…N-1 ,where k is a sample. Figure 3.4 (b) shows the average out of the
decomposed MMF stages. The edges of the windows are visible in the average MMF
output which shows the edge detection characteristic of the MMF. The edges are
fundamental to the detection of changes in the magnitude of the measured voltage
and/or current quantity, and they are emphasized by subtracting the average MMF
output from the original AC signal as shown in Figure 3.4 (c). The graph of Figure
3.4 (c) is the initial fault detection signal, ∆f (delta f). The initial fault detection
signal is created through the process described by (3.17) – (3.21) at the decomposed
MMF stages.
The technique applied in this algorithm makes use of one unique characteristic
of the MM in edge detection [159], [160]. This can be observed on the average
MMF output of Figure 3.4 (b), the leading and the lagging edges of the data window

72 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
are emphasised. The subtraction of the original signal and the average MMF output
further emphasises the edges as shown in Figure 3.4 (c). The edges are fundamental
in the application of the algorithm in detecting power system disturbances.
Figure 3.4: DOCAS Response at the MMF stages (a) Simple AC input signal, (b) MMF average
output and (c) Difference fault signal, ∆f
3.5.2 DOCAS MFD Fault Detection Windows
The passage of the initial fault detection signal, Δf through the DOCAS
algorithm at the ASF stages, and the extraction and combination of signal at each
stage of the ASF layers results in the MFD signal output of Figure 3.5.
The MFD output signal is created through the process described by (3.25) –
(3.34). In Figure 3.5, the MFD output signal is segmented into fault detection
windows accomplished through the edge detection characteristic of the MMF. The
process of summing the differences of closing and opening transformation at each
ASF stages results in the suppression of smaller spikes within the fault window and
giving visibility to the edge spikes. The MFD fault windows are fundamental to the
fault detection functionality of the DOCAS algorithm. Based on the design
consideration of 64 samples per fundamental period and data window size of 16
samples, a fault detection window is of a quarter cycle duration resulting four fault
detection windows per fundamental period. A fault detection window is defined by
two edge spikes, one beginning and one ending. Moreover, it can be observed that

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 73
one edge spike is taller than the other, and the order of appearance depends on where
the first sample was taken. The DOCAS algorithm generates spikes based on slope
detection. Naturally, steeper slopes occur on transition from high value region (near
the positive/negative peaks) to lower value region (zero-crossing) of the signal
waveform as compared to slopes at or near the positive/negative peaks. Thus, the
taller edge spikes occur towards the zero-crossing while the shorter edge spikes
occur towards positive and negative peaks. In a fundamental cycle, there are four tall
edge spikes and four shorter edge spikes. The MFD values for both the tall and short
edge spikes, represented by their heights are relative to the instantaneous peak value
of the AC signal input. Referring to Figure 3.5, it can be observed that two
consecutive tall edge and short edge spikes appear together. These spikes are
separated by ∆T = 312.5μs and represent the end and the beginning of two
consecutive fault detection windows. Let’s denote the tall edge and short edge spikes
as MFDTall and MFDShort respectively then their sequence of appearance can be
defined by (3.37) and (3.38), where k represents a point in the domain of the sampled
signal.
( )1,..,0
12
2−=
+
= k
TNk
TkNMFDTall (3.37)
( )=
+
= ,..,1
1k
TNk
TkNMFDShort (3.38)
Such that MFDTall(1) = 2kN∆T and MFDTall(2) = 2k(N+1)∆T are two
consecutive tall edge spikes and MFDShort(1) = kN∆T and MFDShort(2) = k(N+1)∆T
are the two consecutive short edge spikes. Note that, the MFD output depicted in
Figure 3.5 corresponds to the simple AC signal of Figure 3.4 (a) where it can be
noticed that all tall edge spikes are of equal MFD value of about 0.0775 while the
short edge spikes are of equal MFD value of 0.0475 both relative to the normalized
peak amplitude of 1 in the simple AC signal. Moreover, the MFD values of the tall
and short edge spikes quoted are not fixed values, however they correspond to the
signal considered and are used for illustration. The change in the MFD value
visualized by the change in the height of both the tall edge spikes and the short edge
spikes indicate occurrence of a disturbance.

74 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
3.5.3 DOCAS MFD Fault Detection Windows Time Delays
Supposing the beginning and ending of a fault detection window are
represented by MFDTall(1) and MFDShort(1) which separated by a time delay defined
as Twin = (N – 1)∆T. Based on the data window size of N = 16 and ∆T = 312.5μs,
Twin translates to 4.6875 ms. If we denote MFDTall(1)p being the tall edge spike in the
current fault window, and MFDTall(1)n being the tall edge spike in the next fault
window, then the time delay between these spikes can be defined as Tupdate = (2N-
1)∆T = 9.6875ms. The value of MFDTall is updated within this time delay for
continuous monitoring of the power system. The next time delay that needs to be
defined is Tdmax. This is the time delay in which a disturbance must be detected and
declared as a fault. In determining Tdmax, factors such as different fault inception
angle, power factor, severity of the fault and fault distance were considered.
Moreover, in considering that fault conditions are detected by edge spikes, the
minimum delay that would account for all factors considered was determined to be a
¾ cycles +1 sample. Hence, Tdmax = (3N+1)ΔT = 15.3125ms. This time can be
determined in terms of the tall window edge spikes as well. let tf = nfΔT nf = 0,.,N-
1denote the fault inception point, where nf is the faulted sample within a fault
window. The first point of fault level detection, denoted t1 is the beginning edge
spike of the next consecutive window such that, t1 = (N- nf + 1)ΔT nf = 0,…,N-1.
Since there are 5 edge spikes within Tdmax, the last point of detection is the beginning
edge spike of the 4th consecutive window after fault inception denoted t5 = (3N- nf +
1)ΔT nf = 0,…,N-1, such that Tdmax = t5.
From the foregoing, it can be deduced that, the minimum and maximum fault
detection delay imposed by the design are, ∆T and Twin respectively.
Figure 3.5: Fault detection windows of the DOCAS MFD output signal

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 75
3.5.4 Detecting Power System Disturbances
The DOCAS algorithm is designed to detect irregularities on the contour of the
graph of the input signal waveform caused by transients during power disturbances.
Moreover, any power system even usually results in swelling or decreasing of current
and/or voltage waveforms. These events are captured within the fault windows,
where appearance of any spikes within the window represents the deformities on the
graph of the input signal. The height of the spikes is relative to the rate of change in
the slope of the deformities on the contour of the graph. Furthermore, since the edge
spikes are within the data window set, the height of the edge spikes also increase or
decrease relative to the change in the instantaneous value of the input signal
waveform. Thus, variation in the heights of edge spikes during any disturbance is
relative to the variation in current and/or magnitude. While either or both edge spikes
can be monitored for occurrence of any disturbance, the DOCAS algorithm considers
only the tall edge spikes. The change in height of the tall edge spikes in the MFD
outputs of the measured quantities (voltage and current) indicates the presence or
occurrence of an event. This can be demonstrated by considering a typical single to
ground fault. Figures 3.6 and 3.7 show the response of the DOCAS algorithm to
current and voltage forms respectively for a SLG fault on phase A at 0.03s.
Figures 3.6 (a) and 3.7(a) show the faulted phase (phase A) current and voltage
waveforms respectively, where there is an increase fault current magnitude with a
corresponding decrease in voltage magnitude. The respective MFD output signal for
the fault current and voltage for each phase are shown in Figures 3.6 (b)-(d) and
3.7(b)-(d), which obviously show relative changes in the MFD edge spikes with
respect to the corresponding phase current and voltage. The MFD outputs of the
unfaulted phases do not show significant variations, if any at all. The MFD output of
the faulted phase (phase A) on the other hand shows significant variation in the MFD
edge spikes. Hence, power system disturbances can be detected by monitoring the
variation in MFD edge spikes. While both tall and short edge spikes can be used, we
will however use the tall edge spikes. The two consecutive tall edge spikes
corresponding to phase A fault current and voltage are shown in Figures 3.8 and 3.9
respectively. In overcurrent protection, the current magnitude is monitored, thus
variations in current magnitude is monitored in this context.

76 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
The tall window edge spikes, designated MFDTall are continuously monitored
for an indication of the occurrence of any disturbance. The disturbance is detected by
deviation in fault current magnitude from the prefault magnitude. Thus, let Imax(w) be
the maximum instantaneous current magnitude in the present fault detection window
represented by its MFDTall value, and Imax(w+1) be the maximum instantaneous
current magnitude in the previous window represented by its MFDTall value stored in
the memory. The increase in fault current magnitude is detected by computing the
increase in the MFDTall value from Imax(w+1) to Imax(w) as defined by (3.39).
( )( ) ( )
( )1
1
max
maxmax
+
+−=
wI
wIwIpuIinc (3.39)
where Iinc(pu) is the per unit increase in the current magnitude. Generally, in
overcurrent protection, increase in current magnitude is sensed for abnormalities or
short circuit fault conditions. Thus, if Iinc ≤ 1, no abnormality exists, or no
disturbance has occurred, and the system is in normal state. If Iinc > 1, then
disturbance has occurred. The detection of any disturbance does not necessarily
mean a fault exists. To possibility of a fault exist though and must be tested against
overcurrent threshold parameter to determine if the disturbance is a fault or a normal
operating condition.
3.5.5 Memory Update
The MFDTall value corresponding to Imax(w+1) stored in the memory buffer is
updated every 9.6875 ms with the MFDTall value corresponding to Imax(w) under
normal state. That is, if Iinc ≤ 1, update Imax(w+1) and continue monitoring. If Iinc
> 1, the value of Imax(w+1) before the disturbance is retained, and only updated
when the threat has been cleared.
By continuously updating the current signal MFD value in the memory, the
state of the power system is continuously monitored. Any change in the load
condition or network topology change affects the MFDTall value, and by performing
the check defined in (3.25), the state of the power system network is monitored at
regular interval of 9.6875 ms.

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 77
Figure 3.6: DOCAS response to SLG fault, (a) Fault current waveforms, SLG fault on phase
A, (b)-(d) corresponding MFD Outputs for each phase.
Figure 3.7: DOCAS response to SLG fault (a) Fault voltage waveforms for SLG fault on
phase A, (b)-(d) corresponding MFD outputs for each phase.
Figure 3.8: The MFD tall edge spikes for current, (a) MFDTall (1) and (b) MFDTall (2) The
MFD tall edge spikes for current, (a) MFDTall (1) and (b) MFDTall (2)

78 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
Figure 3.9: The MFD tall edge spikes for voltage, (a) MFDvTall (1) and (b) MFDvTall (2)
3.5.6 DOCAS Attributes for HIF Feature Extraction
The DOCAS algorithm operates on the fault signal inputs to extract features for
HIF detection and classification. The two HIF characteristics targeted by the DOCAS
algorithm are 1) arc extinction and re-ignition of the HIF arc around the fundamental
period resulting in shoulder shaped unsymmetrical fault current waveform and 2)
randomness, due to randomly changing effective fault resistance, Rf resulting in
erratic fault current waveform. The DOCAS algorithm generates MFD spikes at
specific locations on the output MFD signal that correlate to the target HIF
characteristics. The MFD fault detection windows are fundamental to this concept
where changes in the edge spikes as well as appearance of random spikes within the
fault detection window correlate to transients generated by a disturbance or an event.
The HIF current flowing through the high impedance path represented Rf
normally result is very low RMS current magnitude of between 10A-50A. While this
will not have any noticeable or significant impact on the fault current seen by the
feeder OC relay, it is however assumed that the HIF current will leave its footprint
on the feeder current and voltage signals. The DOCAS algorithm can detect
insignificant changes on the topography of the input signals and generates MFD
spikes at its output that correlate to these changes. While both voltage and current
signals can be considered for HIF feature extraction, in the DOCAS algorithm the
voltage signal is utilised as it was observed that voltage signal presented better
transient characteristics compared to current signal.
HIF Arc Extinction and Re-ignition Characteristic: The current and voltage
waveform intersect once every half cycle. If they are in phase, then this happens at
zero magnitude of each signal. If they are not in phase, then at the point of
intersection, the instantaneous voltage and current magnitude are equal. In a 50 Hz

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 79
system, this repeats every 0.01s. A spike is generated in the MFD output at the point
of intersection that correlates to this phenomenon as shown in Figure 3.10(a).
Let’s denote the spikes as MFDARC, and the point of intersection as Tθ, then the
MFDARC spikes can be defined by (3.40);
2 0,...,ArcMFD T kN T k= + = (3.40)
The AC arc extinguishes and re-ignites twice every have cycle. The arc
remains extinguished for a short period of time while waiting for the voltage to
regain until it reaches the restriking level to overcome the gap separation break down
voltage for arcing to happen again. This phenomenon impacts the fault voltage at
specific and fixed period defined in (3.40). The arc extinction and re-ignition thus
causes the MFD spikes defined as MFDArc to grow in height when HIF occurs.
Hence, the MFDArc spikes can be separated to observe the arc extinction and re-
ignition HIF characteristic. The MFDArc spikes maintain uniform height under
normal condition as observed in Figure 3.10(c) for the period before 0.03s. A HIF is
initiated at 0.03s and the HIF arc extinction and re-ignition occurs about zero-
crossing of the fundamental period shown in Figure 3.10(b) resulting in increased
height of the MFDARC spikes above the prefault level as shown in Figure 3.10(c) for
the period after 0.03s.
HIF Randomness Characteristic: The randomness characteristic would be
captured at the edge spikes and fault windows as previously defined (refer Figure
3.5). The tall and short edge spikes, MFDTall and MFDShort respectively defined in
(3.37) and (3.38) randomly vary in height under HIF condition. Transients occurring
closer to the zero-crossing of the fundamental cycle will cause random variation in
the height of MFDTall spikes while those closed to the positive and negative peaks
will cause random variation in the height of the MFDShort Spikes.
The appearance of the elongated edges spikes is non-uniform and random, and
can occur at any point from k = 0 to ∞-1 and k = 1,..,∞ as defined by (3.37) and
(3.38) if HIF exists. Those transients occurring away from the zero-crossing and the
positive and negative peaks will cause random spikes to grow inside the fault
windows. These spikes defined as MFDWindow will appear inside the fault windows
and will persist in the presence of HIF.

80 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
Figure 3.10: DOCAS output for HIF arc extinction and re-ignition feature (a), voltage
signal and current signals, (b) fault voltage and HIF current, and (c) MFDv output showing
target MFDArc spikes
3.5.7 DOCAS Response to DC Arc-Fault
The DOCAS algorithm is a multistage MM filter designed for the detection and
diagnosis of all types of faults in radial distribution feeders and DC arc-faults on the
DC bus of DC power systems including PV systems. The structure of the DOCAS
algorithm and its mathematical derivations are universally applied in all respect.
However, the input signals are different where its application in fault detection and
diagnosis in the radial distribution feeder relies on AC voltage and current signals as
input quantities while in DC arc-fault detection, the input signals are DC voltage and
current. Moreover, the SEs, A1, A2, B1 and B2 derived from the eccentrically
decreasing convex SE are utilized in the DOCAS algorithm in DC arc-fault
detection. While the SE used is designed from attributes of the AC signal, its reduced
structure for computational efficiency giving five points eccentrically decreasing
weighted convex having the following points [0.957, 0.995, 1, 0.995, 0.957] with
two unequal slopes is adopted without any change for DC arc-fault detection. The SE
as previously applied in AC system fault detection are decomposed into, A1 = [0.995,
1, 0.995], A2 = [0.957, 1, 0.957], B1 = [0.995, 1, 0.995] and B2 = [0.957, 0.995, 1,
0.995, 0.957]. A1 and A2 are used in the MMF section while B1 and B2 are used in the
ASF section.
The DOCAS algorithm as a DC Arc-Fault Detector retains its original design,
however its response to AC and DC signal inputs are significantly different. The

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 81
attributes of the DOCAS algorithm as a DC Arc-Fault Detector can be observed
through simulation of a DC arc-fault. DOCAS response to a DC arc-fault on the DC
side of a PV system for the DC current and voltage are shown in Figures 3.11 and
3.12 respectively.
DC Arc-Fault Detection: The DOCAS algorithm generates MFD spikes at its
output based on sloped detection. Figures 3.11(a) and 3.12(a) are the DC current and
voltage inputs to the DOCAS algorithm respectively where DC arc-fault occurs at
1.5s. The DC input signals are transformed by the decomposed MMF stages whose
average current and voltage outputs are given in Figures 3.11(b) and 3.12(b). The
average DC current and voltage outputs of the MMF stages are respectively
subtracted from the DC current and voltage input signals to produce the difference
DC current and voltage signals in Figures 3.11(c) and 3.12(c).
The difference DC current and voltage signals are transformed by the two layers
ASF, and at each stage of the ASF layers, the transformed signals are extracted and
combined to form the MFD outputs according to (3.36), and the results are shown in
Figures 3.11(d) and 3.12(d) for the DC current and voltage respectively.
It is obvious from Figures 3.11 and 3.12 that the concept of fault detection
window is not available because of the non-sinusoidal nature of the (DC) signal. The
onslaught of the arc is detected by appearance of spikes which increase in height in
response to the fast changing (rate of change of the random DC arc) noise like DC
arc characteristic that sustains when ignited. The spikes in the MFD output appear
chaotically. The DOCAS algorithm detects DC arc-fault by means of detecting the
chaotic behaviour of the random DC arc. Moreover, the MFD output only produces
spikes when arcing occurs.

82 Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm
Figure 3.11: DOCAS response to DC arc-fault in PV systems, (a) DC arc-fault voltage, (b)
Average MMF output, (c) diff DC fault voltage, ΔV and (c) MFD output.
Figure 3.12: DOCAS response to DC arc-fault in PV systems, (a) DC arc-fault current, (b)
Average MMF output, (c) diff DC fault current, ΔI and (c) MFD output.
3.6 CONCLUSION
A multistage fault detection and diagnostic tool called the DOCAS algorithm
utilising two classes of nonlinear morphological filters called the MMF and ASF was
developed. A SE with a sinusoidal geometrical structure was designed based on the
sampling rate and the fundamental frequency with points as many as 16 points
representing the data window. The SE was restructured in the interest of maintaining
computational efficiency to five points without compromising the integrity of the
algorithm. The restructured algorithm resulted in an eccentrically decreasing SE with
two unequal slopes. Further restructuring was made by decomposing the SE into two

Chapter 3: Designing the Multistage MM Arc Fault Detection Algorithm 83
separate SEs with equal slopes allowing for weighted dilation and erosion to enhance
the functionalities of the DOCAS algorithm in fault detection and diagnosis as well
as feature extraction. The algorithm’s functional attributes and characteristics for
fault detection including feature extraction for HIF detection and classification were
evaluated by analysing its response to a simple AC input. Furthermore, the algorithm
was subjected to a SLG fault to determine its behaviour, especially in detecting any
abnormal condition by detecting changes in current and/or voltage magnitudes.
Furthermore, the features of the DOCAS algorithm in responding to the simple AC
signal provided means to develop a technique for adaptive threshold parameter
setting in OC protection by periodically updating the MFD value in a memory buffer
in response to changes in the current magnitude due to changing load and network
changes.
The structure of the DOCAS algorithm and decomposition of the SE allowed
for its seamless application in DC arc-fault detection with any adjustment. In
evaluating the DOCAS algorithm as a DC Arc-Fault Detector, DC current and
voltage signals under DC arc-fault were used to analyse its behaviour. It was
observed that, DOCAS algorithm as a DC Arc-Fault Detector exhibited different
characteristics as opposed to its application in AC system fault detection. The
DOCAS MFD algorithm generates MFD spikes by detecting rate of change (slope
detection) rather than the displacement. Thus, DOCAS algorithm as a DC Arc-Fault
Detector detects DC arc-fault by detecting the chaotic behaviour of the DC arc-fault
by generating MFD spikes in response to the rapid change in the DC current and
voltage signals when subjected to sustained DC arc-fault.
Through the simulations the performance of the DOCAS algorithm as a tool for
fault detection and diagnosis in both AC and, specifically DC arc-fault detection in
DC systems have been verified. The features and functional attributes of the
algorithm showed characteristics for its application in; radial distribution feeder OC
protection with adaptive threshold parameter setting, feature extraction for HIF
detection and the detection and classification and DC arc-fault detection.

84 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Chapter 4: Adaptive Overcurrent Protection
in Active Radial Distribution
Feeders with RE Based DERs
4.1 INTRODUCTION
The increased penetration of RE based DERs at the radial distribution feeders
transforms the feeders from being passive with unidirectional current flow to being
active networks bidirectional current flow. This phenomenon reduces the current
contribution by the grid due to current injection by the DERs which consequently
impacts on the feeder OC protection. This chapter begins by 1) presenting a
theoretical analysis based on Thevenin equivalent circuit modelling and
decomposition of the circuits into sequence networks to determine relationship for
the level of fault current injection under fault condition by the PV systems. Then 2),
a radial distribution feeder with several PV systems is modelled using Simscape
library objects in MATLAB/Simulink. Different fault conditions, including single
line-to-ground (SLG), line-to-line-to-ground (LLG) and three phase (3-Ph) faults
were simulated at different locations on the feeder length under different PV
penetration levels, and the results were analysed using the DOCAS algorithm to
verify trend in the fault current magnitude reduction due to PV system penetration.
Then a method for short-circuit fault detection with adaptive threshold parameter and
adaptive inverse time overcurrent (ITOC) relaying using the DOCAS (MFD) output
is proposed to overcome the challenges in feeder OC protection influenced by the
increasing RE based DER penetration such as PV systems. Moreover, the chapter
describes the theoretical analysis and presents the simulation results of the technique
used in suppressing the exponentially decaying offset.
The rest of the chapter is organised as follows; in sections 4.2, 4.3 and 4.4 a
theoretical method based on Thevenin equivalent circuit as well as distance factors of
PV and fault locations are presented. In sections 4.5 and 4.6 a secure and robust
method for adaptive OC protection in radial distribution feeders with PV penetration
using the DOCAS algorithm with adaptive OC threshold is presented. In section 4.7
the simulation results and discussion are provided on the impact of PV penetration on

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 85
feeder OC protection. In section 4.8, a method for adaptive inverse time OC relaying
using the DOCAS algorithm is presented followed by conclusion in section 4.9.
4.2 THEVENIN EQUIVALENT PARAMETER ESTIMATION
4.2.1 Photovoltaic Distributed Energy Resources
In Figure 4.1, a typical radial distribution feeder with PV system connection
is shown and provides the system for analysis in the proceeding sections.
In the system in Figure 4.1, all measurements for the analysis are assumed to
be taken from the feeder substation and the point of common coupling (PCC) of the
PV systems. Supposing there is U number of PV systems connected at various points
along the distribution feeder. The feeder voltage is nominally at 25kV, and all PV
sources are connected via Δ//Y transformers at PCC. Moreover, it is assumed that the
main feeder overcurrent protection relay is located at the main feeder substation, and
the voltage and current measurements are taken for fault detection. However, based
on recent level of technology integration and practice it is also possible to take
individual voltage and current readings by installing digital fault recorders (DFRs) at
the PCC of each PV system for dynamic estimation of Thevenin models of the PV
sources[161]. Furthermore, it is assumed that all measurements taken are
synchronized with the signal measurements taken at the feeder substation.
Figure 4.1: A typical radial distribution feeder with PV penetration
4.2.2 Thevenin Equivalent Voltage and Current
Assuming that a PV source could be coupled to the feeder at any point on the
feeder length, then the point at which a PV source is coupled to is defined as

86 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
𝑃𝑉(𝑢)∀𝑢 = 1. . , 𝑈. The voltage and current measured at the point of coupling of the
uth PV can be defined as 𝑉𝑃𝑉(𝑢) and 𝐼𝑃𝑉(𝑢) respectively. Considering that the PV
sources are assumed to inject only positive sequence voltage and current under load
condition, then the positive-sequence voltage and current measured at PV(u) can be
defined as 𝑉(1)𝑃𝑉(𝑢) and 𝐼(1)
𝑃𝑉(𝑢) respectively. Then an equation that relates the
per phase (positive-sequence) prefault voltage and current for the uth PV source can
be expressed in (4.1) [161]
(1) (1) (1)( ) ( ) ( ) ( )PV PV PVE u V u Z u I u= + (4.1)
where 𝑍𝑃𝑉(1)
(𝑢) is the series positive-sequence Thevenin equivalent impedance at
PV(u) for all interfacing devices including the transformer. Supposing a fault occurs
at some point on the feeder, the equation in (4.1) can be modified to reflect the fault
condition as given in (4.2);
(1) (1) (1)( ) ( ) ( ) ( )PV PVF PV FE u V u Z u I u= + (4.2)
where 𝑉𝐹𝑃𝑉
(1)(𝑢) and 𝐼𝐹𝑃𝑉
(1)(𝑢) are the positive-sequence fault voltage and current
respectively seen at PV(u) injected by the uth PV source.
4.2.3 Thevenin Sequence Impedances and Sequence Networks
The positive sequence Thevenin impedance at PV(u) can be determined by
equating (4.1) and (4.2). Denoting, ∆𝑉𝑃𝑉(1)(𝑢) = (𝑉𝑃𝑉
(1)− 𝑉𝐹𝑃𝑉
(1))(𝑢), is the change in
positive-sequence voltage magnitude from prefault condition to fault condition, and
similarly, ∆𝐼𝑃𝑉(1)(𝑢) = (𝐼𝐹𝑃𝑉
(1)−𝐼𝑃𝑉
(1))(𝑢) is the change in current magnitude from
prefault condition to fault condition, such that, ∆𝑉𝑃𝑉(1)(𝑢) = 𝑍𝑃𝑉
(1)∆𝐼𝑃𝑉
(1)(𝑢). Then the
positive-sequence Thevenin impedance at PV(u) can be determined by (4.3).
(1)(1)
(1)( ) ( )PV
PV
PV
VZ u u
I
=
(4.3)
The positive sequence voltage and current measured by the DFRs at the PCC
of the PV sources are phase values. The zero- and negative sequence impedance can
be obtained following the standard convention as indicated by Figure 4.2. The zero-

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 87
and negative-sequence impedances at PV(u) can be obtained by transforming the
voltage to sequence components as follows;
( ) ( )s pV u AV u= (4.4)
( ) ( )s pI u AI u= (4.5)
where Vs and Is are sequence voltage and current respectively, and similarly Vp and Ip
are phase voltage and current respectively. A is the transformation matrix such that,
2
2
1 1 1
1
1
A a a
a a
=
(4.6)
where 𝑎 = 𝑒𝑗2𝜋
3 . Then using standard notations of sequence networks shown in
Figure 4.2, the negative- and zero-sequence Thevenin impedances for the uth PV
source are;
(0)
(0)
(0)( ) ( )PV
PV
F
PV
F
VZ u u
I= − (4.7)
(2)
(2)
(2)( ) ( )PV
PV
F
PV
F
VZ u u
I= − (4.8)
All inertial sources including the substation source are modelled similarly using the
voltage and current measurements at their point of coupling. Replacing all subscripts
in (4.1) - (4.2) from PV to SS, the positive-, negative- and zero-sequence Thevenin
impedances of the substation (SS) source as seen from the point of measurement are;
𝑍𝑆𝑆(1)
, 𝑍𝑆𝑆(2)
and 𝑍𝑆𝑆(0)
respectively.
Figure 4.2: PV system sequence networks
The fault current contribution of PV(u) seen at the substation can be
determined by appropriate cascading of the relevant sequence networks, depending
E(m) 𝑉𝑃𝑉0
𝑍𝑃𝑉1 (𝑢)
𝐼𝑃𝑉1
𝑉𝑃𝑉1
Positive sequence
𝑍𝑃𝑉2 (𝑢)
𝐼𝑃𝑉2
𝑉𝑃𝑉2
Negative sequence
𝐼𝑃𝑉0
Zero sequence
𝑍𝑃𝑉0 (𝑢)

88 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
on the type of the fault at the point of common coupling with the sequence networks
of the distribution feeder.
4.3 EFFECT OF PV SYSTEM PENETRATION ON FEEDER SUBSTATION
FAULT CURRENT LEVEL
Considering the system in Figure 4.1, assume that there are U number of PV
systems connected at locations along the feeder length such that, the distance to the
point of coupling of the uth PV from the substation is denoted dPV(u). Supposing the
total feeder distance is l, then a distance factor, denoted df(u)∀ u=1,..,U can be
defined by (4.9).
( )( ) 1,...,f
dPV ud u u U
l= = (4.9)
PV1 is the nearest PV system to the substation with a distance of dPV(1). It is
assumed in this analysis, that PV1 is connected at a close proximity to the feeder
substation, thus is assumed to have a zero meter (dPV(1) ≈ 0 ) from the substation .
The furthest PV system is PV(U), where dPV(u) = l, then df can have possible values
between 0 and 1.
Supposing a fault occurs at some point on the distribution feeder of Figure 4.1.
Similarly, the distance to fault as seen from the substation can also be defined by a
fault distance factor denoted dff. Supposing the distance to fault is denoted dF in
meters; then the fault distance factor can be defined as;
ff
dFd
l= (4.12)
dff can have values between dffmin = 0 and dffmax = 1, where fault closes to the
substation, assuming at PV(1) will have dffmin value while a fault at the end of the
feeder, assuming at PV(U) will have dffmax value.
4.3.1 Fault Location with Respect to PV System Location
The following test conditions can be established to determine the location of
the fault with respect to PV(u). If dff = df(u), the point of fault is at PV(u). If dff >
df(u), the point of fault is on the right or downstream to PV (u) with respect to the
direction of current flow. On the other hand, if dff < df(u), then the fault is on the left
or upstream to PV(u) with respect to the direction of the current flow.
Alternatively, supposing ε(u) denotes a deviation between dff and df(u), such
that 𝜀(𝑢) = 𝑑𝑓𝑓 − 𝑑𝑓(𝑢) is a measure of proximity to the fault location with respect

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 89
to the uth PV system. The factor ε can have absolute value between 0 and 1, such that
| ε(u) | = 0 indicates fault location is at PV(u) and | ε(u) | = 1 indicates fault location
either at the feeder substation or at the end of the feeder length with respect to PV(U)
and PV(1) respectively. The smaller the | ε(u) | is, the closer the fault is to PV(u).
Fault can be located at either downstream (on the right) or upstream (on the left) of
PV(u) with respect to the direction of the current flow. The direction of the fault
location with respect to PV(u) depends on the polarity of ε(u). If ε(u) is a positive
value the fault is downstream, and if ε(u) is a negative value the fault is upstream.
4.3.2 PV Systems Fault Current Contribution
Supposing the radial feeder of Figure 4.1 has five PV systems (U = 5)
connected at points along the feeder length. A bolted three-phase fault occurs at
location between PV(3) and PV(4). The per phase diagram of the system under fault
is shown in Figure 4.3 with the point of fault designated F. All PV sources with dff >
df(u) and having ε(u) with positive values are categorized as downstream sources as
they feed fault current downstream to the fault. Conversely, all PV sources with dff <
df(u) and having ε(u) with negative values are categorized as upstream sources and
feed the fault that is upstream.
Let 𝐼𝐹1 and 𝐼𝐹2
respectively denote the total fault currents injected by all
downstream and all upstream sources respectively such that the total fault current at
point F is 𝐼𝐹 = 𝐼𝐹1+ 𝐼𝐹2
. Supposing there are D number of PVs feeding fault current
downstream to the point of fault F and (U-D) number of PVs feed fault current
upstream; then the fault current injection by these PV sources can be denoted 𝐼𝐹𝑃𝑉𝑑𝑛
and 𝐼𝐹𝑃𝑉𝑢𝑝 respectively, where;
( )
1PVdn PV u
D
F F
u
I I=
= (4.13)
( )PVup PV u
U
F F
u U D
I I= −
= (4.14)
The total fault current injected downstream to the point of fault is;
1 ( )
1ss PV u
D
F F F
u
I I I=
= + (4.15)

90 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
where IFss is the fault current contribution from the substation source which is
additive to the fault current injection by all downstream PV sources.
Assuming 𝐼𝐿 ≈ 0, the total fault current injected upstream to the point of fault
is;
2 ( )PV u
U
F F
u U D
I I= −
= (4.16)
The total fault current seen at the point fault is;
( ) ( )
1ss PV u PV u
D U
F F F F
u u U D
I I I I= = −
= + + (4.17)
Noting that 𝐼𝐹𝑆𝑆 is the fault current contribution by the substation source, it is
obvious from (4.17) that high penetration of PV systems will increase the fault
current contribution by them, and consequently reduce the fault current magnitude
seen at the feeder substation. Moreover, 𝐼𝐹𝑆𝑆 is a component of 𝐼𝐹1
which is the total
fault current injection from all sources, including the substation source feeding the
fault downstream. Hence, a large number of downstream sources with respect to the
fault location will also reduce the fault current level seen at the feeder substation.
This implies that, fault closest to the substation will register higher fault current
contribution from the substation source as there will be less downstream PV sources.
As the fault moves further away, the fault current contribution by the substation
source will reduce as the PV sources feed the fault. However, with high penetration
of PV DERs with large capacitor, the fault current magnitude seen at the feeder
substation can be significantly reduced irrespective of the fault location thus
affecting the over current system protection system coordination.
Figure 4.3: Per phase circuit diagram of the typical radial feeder system with PV

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 91
4.4 EFFECT OF FAULT LOCATION ON FEEDER SUBSTATION FAULT
CURRENT LEVEL
An equivalent per phase circuit diagram categorising the downstream and
upstream PV sources with respect to the point of fault F is shown in Figure 4.4., and
basing on this circuit arrangement, let 𝑉𝑃𝑉𝑑𝑛 and 𝑉𝑃𝑉𝑢𝑝 be the Thevenin equivalent
voltages of the downstream and upstream PV sources respectively. 𝑍𝑇ℎ𝑑𝑛 is the
Thevenin equivalent impedance of all the downstream PV sources and the
impedances of downstream feeder line segment between PV sources. Similarly,
𝑍𝑇ℎ𝑢𝑝 is the Thevenin equivalent impedance of all the upstream PV sources and the
impedances of feeder line segment between each upstream PV sources. As
previously considered, there are five PV sources (U = 5), and a short-circuit fault
occurs on the feeder between PV(3) and PV(4) such that PV(3) is the Dth PV source
and PV(4) is the (U-D)th PV source, then ZThdn′ and ZThup′ take the form in (4.18)
and (4.19) respectively.
' 1
1 1
1 (3)(3)
1 1
1 (2)(2)
(1)
Thdn
PVL
PVL
PV
Z
ZZ
ZZ
Z
=
+
+
+
+
(4.18)
' 1
1
1 1
1 (4)(5)
(5)
Thup
PVL
PV
Z
ZZ
Z
=
+
+
(4.19)
where ZPV(u) is the Thevenin impedance of the PV source seen at the PCC and
ZL(u) is the impedance of the line segments between PV sources along the feeder.
Supposing the impedance per meter of the feeder line can be represented by z Ω/m,
then the total feeder line impedance is Z = zl. The feeder line impedance between
PV(u) and the substation, in terms of the distance factor is then,
( ) ( )L fZ u d u Z= Ω (4.10)

92 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Then, the total impedance of the feeder line in terms of the line segments from the
PV(1) to PV(U) can be expressed by (4.11),
( )2
( ) ( 1)U
L L
u
Z Z u Z u=
= − − Ω (4.11)
The impedance of the line segment between PV sources in terms of the distance
factor, df(u) is, ZL(u) = Z(df(u) – df(u – 1)). It must be noted that, the Thevenin
impedances defined in (4.18) and (4.19) do not include the impedance of the faulted
line segment. Considering that the fault occurs in the line segment between PV(3)
and PV(4), the impedance of the fault line segment is then ZL(4) such that in terms of
PV distance factors, ZL(4) = Z(df(4) – df(3)). Fault can be located at any point within
ZL(4). The distance to fault with respect to the substation is represented by the
distance factor dff. The proximity to the fault with respect to PV(3) is, ε(u) = dff –
df(u) |u = D = 3, then the impedance of the faulted line segment with respect to PV(3) is
ZL(4) ε(u)|u = D = 3. Conversely, the proximity to the fault with respect to PV(4) is, ε(u)
= dff – df(u) |u = ( D+1) = 4. However, df(4) > dff which means fault is upstream with
respect to PV(4) then the impedance of the fault line segment with respect to PV(4)
is ZL(4) (1- ε(u))|u = D = 3 . These impedances are added in series to ZThdn’ and ZThup
’
respectively. The following relationship can be deduced for the downstream sources
by applying KVL to the downstream sources in Figure 4.4;
( ) 3(4) ( ) (4) ( ) |ss PVdnss F ss L F L u DV I Z Z u I Z u = == + + (4.20)
( )'
3(4) ( ) (4) ( ) |ss PVdnPVdn F L F Thdn L u DV I Z u I Z Z u = == + + (4.21)
where Vss is the substation source Thevenin voltage, and VPVdn is the Thevenin
voltage of all the downstream sources. The Thevenin equivalent impedance for the
downstream side of the feeder under fault seen from the point of fault is;
'
3'(4) ( ) |ss Thdn
Thdn L u D
ss Thdn
Z ZZ Z u
Z Z = == +
+ (4.22)
Let VThdn be the Thevenin equivalent voltage for all the downstream sources
including the substation source, then the fault current contribution from all the
downstream sources including the substation source is;

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 93
1Thdn
F
Thdn
VI
Z= (4.23)
Let VPVup be the Thevenin voltage of all the upstream PV sources, then the upstream
sources can be similarly expressed as given in (4.24)
( )( )'
3(4) 1 ( ) |PVupPVup F Thup L u DV I Z Z u = == + − (4.24)
The Thevenin equivalent impedance for the upstream side of the feeder under fault
seen from the point of fault is;
( )'
3(4) 1 ( ) |Thup Thup L u DZ Z Z u = == + − (4.25)
Let VThup = VPVup be the Thevenin equivalent voltage for all the upstream PV sources,
the fault current contribution from all the upstream PV sources is;
2
Thup
F
Thup
VI
Z= (4.26)
Assuming a three-phase fault such that ZF ≠ 0, and applying KVL, the following
relationships can be derived;
( )
'
1
'
2
(4) (3)
(4) 1 (3)
Thdn Thdn L F F F
Thup F Thup L F F
V Z Z Z Z I
V Z Z Z Z I
+ + =
+ − + (4.27)
Considering that, 21 FFF III += , the Thevenin equivalent impedance at the point of
fault is;
( ) ( )( )( ) ( )( )
' '
' '
(4) (3) (4) 1 (3)
(4) (3) (4) 1 (3)
Thdn L F Thup L F
ThF
Thdn L F Thup L F
Z Z Z Z Z ZZ
Z Z Z Z Z Z
+ + + − +=
+ + + + − + (4.28)
In the case of bolted fault, ZF is removed from (4.28). Moreover, the sequence
components are appropriately connected subject to the type of fault.
Supposing VThF is the Thevenin equivalent voltage seen at the point of fault,
then the fault current at the point of fault is;
ThFF
ThF
VI
Z= (4.29)

94 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Considering equation (4.28), the Thevenin impedance seen at the point of fault F is a
function of fault distance and level of PV penetration. Increased PV penetration will
result in reduced Thevenin impedance resulting in more fault current contribution by
the PV sources consequently lowering the fault current magnitude seen at the feeder
substation.
Figure 4.4: Per phase circuit diagram categorising PV sources into downstream and
upstream sources with respect to point of fault.
4.5 DOCAS ALGORITHM IN ADAPTIVE OVERCURRENT
PROTECTION OF RADIAL DISTRIBUTION FEEDER WITH PV
PENETRATION
In sections 4.3, 4.4 and 4.5, theoretical network analysis was done to
demonstrate the effect of PV penetration on fault current magnitude seen by the main
OC protection relay at the feeder substation. In this section, the DOCAS algorithm is
used to analyze short circuit faults, then to propose a method for making the feeder
OC protection relay threshold setting adaptive to increasing PV penetration.
Figure.4.5 illustrates the structure of the proposed scheme incorporating the
DOCAS algorithm. Mathematical derivations and the functions of the major blocks
excluding the DOCAS algorithm are presented herein. Voltage and current signals
measured at the feeder substation constitute inputs to the algorithm. Discussions
considers current signal, however is equally applicable to voltage signal as well.

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 95
Figure 4.5: The OC fault detection and diagnostic scheme incorporating the DOCAS
algorithm.
4.5.1 Exponential DC Offset
Power system signals (voltage and current) are normal distorted during a fault
condition. These signals usually contain 1) Decaying DC component, 2)
Fundamental Frequency Component, and 3) Integer harmonics as well non-integer
harmonic components. The presence of the decaying dc-offset and the harmonics
causes distortion on the fundamental frequency component, and this can affect the
accuracy of the algorithm. While the harmonic components can be effectively
filtered by appropriate low pass filters, the decaying dc-offset on the other hand is
not so straight forward. The presence of the exponentially decaying dc-offset is of
concern especially in estimating the magnitude of the fault current and/or voltage
signal.
DC Offset Removal in the Proposed Overcurrent Protection Method: The
removal of the exponentially decaying DC-offset is accomplished through the natural
process of creating the initial fault detection signal, Δf, such that Δf = ∆i is the
difference fault current signal. The method does not require any parameter estimation
and is the integral part of the fault detection process. The technique implemented in
this algorithm is based on adaption of the technique proposed by A.Rahmati et al
[50]. However, in this case two signals, the original fault signal I and the average out
of the MMF filter, Immf are subtracted to eliminate the DC-offset as opposed to the
subtraction of the even and odd samples implemented by [50]. The mathematical
derivation given is intended to describe removal of the DC-offset through the
subtraction of the signals. It does not imply the implementation of any DFT based
filter for this purpose.
Based on the equation for the discretised signal in (3.11), a discretised input
current signal is expressed in (4.30);

96 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
( )0
1
( ) sin 2H
nh h h
h
i n T I r I f n T =
= + + (4.30)
where r = e-ΔT/τ such that I0rn is the DC component with a magnitude and time
constant represented by I0 and τ respectively. The second part of (4.30) is the AC
component with Ih, fh and ϕh being the amplitude, frequency and phase angle of the
hth order harmonic with H representing the highest order harmonic in the fault
current. The phasors for the AC and DC parts of the fundamental frequency (h = 1)
component can be calculated by applying DFT as follows;
AC Part:
( )1
( ) sin 2
H
AC h h h
h
i n T I f n T =
= + (4.31)
Applying DFT to the AC part results in (4.32) [50]
1 1 1 1
1 2 1 2( ) 1 cos 1 sinacI n I n jI n
N N N N
= + + + − +
(4.32)
such that the real and imaginary parts of (4.32) are;
1 1
1 2Re ( ) 1 cosacI n I n
N N
= + +
(4.33)
1 1
1 2Im ( ) 1 sinacI n I n
N N
= − +
(4.34)
Thus, the amplitude of the AC part of the fundamental frequency component is
( ) ( )2 2
( ) Re ( ) Im ( )ac ac acI n I n I n= + (4.35)
DC Part:
0 0( )
n T
nDCi n T I r I e
−
= = (4.36)
Applying DFT to the DC part and rearranging results in (4.37) [50]

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 97
( ) nDCI n Mr= (4.37)
where,
02
2 2cos 1 sin
22
2 cos 1 1
N
r j rN N
M I r
N r rN
−
− +
=
− − −
(4.38)
such that the real and imaginary parts of (4.38) are;
0
2
22 cos 1
Re ( )2
2 cos 1 1
N n
dc
I r r rN
I n
N r rN
− −
=
− −
(4.39)
0
2
22 sin
Im ( )2
2 cos 1 1
N n
dc
I r r rN
I n
N r rN
−
=
− −
(4.40)
The fundamental frequency component of the fault signal in (4.30) can be expressed
in terms of the real and imaginary parts of the AC and DC parts are follows;
( ) ( ) ( )
Re ( ) Re ( ) Im ( ) Im ( )
ac dc
ac dc ac dc
i n T I n I n
I n I n I n I n
= +
= + + + (4.41)
Then the amplitude of the fundamental frequency component of the fault current
with exponentially decaying DC offset is;
( ) ( )2 2
_ Re ( ) Re ( ) Im ( ) Im ( )ac Fault ac dc ac dcI I n I n I n I n= + + + (4.41)
The fault current signal transformation at the decomposed MMF stages and its
reconstruction resulted in the average MMF output signal given (3.22). This signal
can be expressed as given in (4.42)
( )0_ _ _ _
1
( ) I sin 2
Hn
mmf mmf h mmf h mmf h mmf
h
i n T I r f n T =
= + + (4.42)

98 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
where I0mmfrn is the DC component of the average MMF output and the second part
of (4.42) is the AC part with Ih_mmf, fh_mmf, ϕh_mmf are the amplitude, hth order harmonic
frequency and phases angle. It must be noted that, at the MMF stages, the fault signal
results in only magnitude transformation while it is assumed that all other signal
attribute, for the DC and the AC part remain unchanged.
Applying DFT to the AC and DC parts of the average MMF output will give
the amplitude of the fundamental frequency component of the average MMF output
with exponentially decaying DC offset as;
( ) ( )2 2
_ _ _ _Re ( ) Re ( ) Im ( ) Im ( )mmf ac mmf dc mmf ac mmf dc mmfI I n I n I n I n= + + + (4.43)
The exponentially decaying DC-offset is mitigated by taking the difference between
Iac_Fault and Immf. The resulting difference current signal is the initial fault detection
signal, Δi having magnitude ΔI given by;
_ac Fault mmfI I I = − (4.44)
It must be noted that, the MMF stages emphasizes the samples at the edges of the
data window on the average MMF output. Thus, the AC signal component is also
reduced except at the edges of the data windows. The peak value of the fundamental
frequency component of Δi without the exponentially decaying DC-offset are relative
to the height of the tall edge spikes (ref Figure 3.10(c)) appearing at the regular
intervals given by (4.44).
(2 )1,....,
(2 ( 1) )
i kN Tk
i k N T
=
+ (4.44)
where k is counter and refers to the point of tall edge spikes.
4.5.2 Smoothing Filter
While the subtraction of the original fault current signal and the average output
of the MMF resulted in the elimination of the decaying component, it however
resulted in generation of high frequency ripples mainly odd harmonic components
which are shown through simulation in Figure.4.3 (c). It is important that the high
frequency ripples do not affect accurate estimation of the fault magnitude. Thus, an

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 99
appropriate low pass filter must be designed to reduce the high frequency ripples. In
this filter design, selection of any cut-off frequency is not necessary. However, a
digital filter that is time invariant and does spectral shaping, and selective frequency
filtering without assigning any cut-off frequency is desirable. An averaging filter is
one such filter, and the one used in this design is the exponentially weighted moving
average (EWMA) filter [162],[163] . The signal needs smoothing is Δi.
Given that Δi is a sequence of sampled data, lets denote the sequence as Δis.
Supposing at any instant, t = nΔT, the average of the previous samples, denoted p
can be computed as follows, [163];
( )
1
1t
tp s
s t pp
i i= − +
= (4.45)
Let’s consider the point t+1 = (n+1)ΔT where the average of the previous samples of
the data sequence can be computed as [163].
1
1
1( 1)
1
1 1
1 1
t
t s
s k p
tt
p s
s t p
i ip p
i i +
= − +
++
= − +
= +
+ +
= (4.46)
Let’s denote ( )
1
tt
s p
s t p
i p i
= − +
= , then (4.46) becomes;
( ) ( )1 1
( 1) 1 1
1 1 1
t tt p t p
tp
pi p i i i
p p pi + +
+ + = + + + +
= (4.47)
The expression for the exponentially weighted moving average filter can be obtained
by shifting the time index back one step. Thus, the expression for Δip(t) is;
( 1)( ) 1
1 1
tt p
tp
pi i
p pi −
+ + +
= (4.48)
Let’s denote,1
p
P=
+, then
1(1 )
1P= −
+, such that the exponentially weighted
moving average (EWMA) filter equation is [163].
( 1)( ) (1 )tp t
tp i ii − + − = (4.49)

100 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
The parameter, α is a weighting constant that dictates the degree of filtering, where it
can have any value within the range 0 ≤ α < 1. Moreover, in (4.49), the EWMA Δip(t)
denotes a weighted average of all past data in the data sequence Δis at point t. When
α → 0, a large number of past data points are considered in computing the EWMA
Δip(t), and as α → 1, there is less and less averaging being performed, and Δip
(t) →
Δip(t-1), and at α = 1 essentially Δip
(t) = Δip(t-1). By recognising (4.49), the EWMA
equation resembles a discrete first-order low-pass filter.
4.5.3 Phasor Estimation
The phasor estimation function of the proposed algorithm is accomplished
using the linear regressions and recursive least square estimates (RLS) techniques.
The least Square Estimate (LSE) technique is a curve fitting method used to estimate
the parameter of the system that generated the output based on a parameter
estimation model. One such model is the linear auto regression with exogenous
inputs (ARX) model given in (4.50) [164];
( ) ( ) tty T=
| (4.50)
where φ(t) is the regression vector whose elements are known and σ is the
unknown parameter vector whose elements are unknown and can be estimated by
means of LSE. Suppose y(t) is the measured data, the task is to estimate the unknown
parameters such that, y(t)-φT(t)σ is minimized. In this algorithm, the non-recursive
LSE is transformed to a recursive LSE based on the technique proposed by [165].
Referring to Figure,4.1, the input signal to LSE parameter estimation block is the
difference fault signal, ∆i, and suppose the output of the model is ŷ(t), and
considering sinusoidal nature of the power system signal, then the model output can
be described by a sum of N sinusoids as defined by (4.51)[166].
( ) ( ) =
+=N
n
ncns TnTnty1
0,0, cossin)( (4.51)
where αs,n = Ansin(δn) and αc,n = Ancos(δn) with An and δn respectively being the
amplitude and the phase angle of the nω0 frequency component. ∆T is the sampling interval
as previously defined. From (4.51), the regression vector can be defined as having elements
given by (4.52).
( ) ( ) 1,....,0sincos)( 00 −== NnTnTnt (4.52)

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 101
where φ(t) is the regression vector, and ωo is the fundamental frequency. The
elements of the regression vector are known since ω0 and ∆T are known. The
unknown parameters vector whose elements are the coefficients of the sine and
cosine terms of (4.51), to be estimated by (4.53)
1,...,0,, −== Nnncns (4.53)
where σ is the unknown parameter vector. From a measured data window of N
samples of the differential fault signal, ∆f, the elements of the unknown parameter
vector can be estimated by the non-recursive least square method as given in (4.54)
( )1
T T i −
= (4.54)
where (φTφ)-1φT is the pseudoinverse of the regression vector. Let σN-1 denote
the non-recursive estimate of the unknown parameter, then (4.54) can be written as
(4.55). The unknown parameter can now be estimated recursively using (4.56) [165]
( )1
1N T T i −
− = (4.55)
( ) ( ) ( ) 1 1N N NG n i n n − −= + − (4.56)
where (∆i(n) - φ(n)σN-1) is the error between the model output and the
measured data at the sample point n∆T. G(n) is an element of the time varying gain
vector G at the same sample point. The elements of G are recursively updated
according to (4.57) [165]
( ) ( )( ) ( )( ) ( ) ( )( )( ) ( )( ) 111 −−−+=
TTTT nnnInnnG (4.57)
Using the estimated parameters, the instantaneous fault signal at any sample
point, n∆T can be calculated using (4.58); and the instantaneous magnitude and the
phase angle is determined using (4.59) and (4.60) respectively.
( ) ( ) ( ) ( ) ( )nnnnnf ccss
+= (4.58)
( ) ( )( ) ( )( )22nnnF sc += (4.59)

102 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
( )
= −
c
sn
1tan (4.60)
where αs(n) = ∆I(n)sin(δ(n)) and αc(n) = ∆I(n)cos(δ(n)) are the instantaneous
magnitudes of the sine and cosine terms respectively of the differential fault current
signal at instant n∆T.
4.6 APPLICATION OF MFD OUTPUT IN ADAPTIVE RADIAL
DISTRIBUTION FEEDER OC PROTECTION
The DOCAS algorithm continuously monitors the network condition by testing
the current signal against a threshold metric. The threshold metric has minimum and
maximum denoted IThresholdmin and IThresholdmax respectively where IThreshold is the current
magnitude threshold to detect and declare a fault condition. If the fault current
magnitude, denoted IFault is such that, IFault > IThresholdmin, a disturbance detection (DD)
flag is activated to alert the algorithm of an abnormal condition. IFault is further tested
against the IThreshold and if IFault > IThresholdmax then level 1, (L1) flag is activated to
indicate overcurrent (OC) fault and OC protection system is activated to act on this
fault. If IFault < IThresholdmax the level 2, (L2) flag is activated to initiate the HIF
detection and classification procedure.
4.6.1 Adaptive Overcurrent Threshold Value
The OC Threshold parameter is used to discriminate the disturbance between a OC
fault and other operation conditions. The current signal is the primary input quantity
to detect any disturbance. The parameter in (3.39) are redefined as, Imax(w) = IFault,
and Imax(w + 1) = IPrefault, such that the per unit (pu) increase fault current magnitude
is defined by (4.61).
( )Fault Prefault
inc
Prefault
I II
I
−= (4.61)
It is assumed that, under OC fault conditions, the current magnitude increases.
In the proposed adaptive OC protection scheme, the pu increase, Iinc is used to detect
and declare the fault. From (4.61), Iinc can have a minimum and maximum value of 0
and ≥ 1.0 per unit respectively where Iinc = 0 means no disturbance, and Iinc ≥ 1
means disturbance has occurred but may not be OC fault. Considering that

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 103
overcurrent threshold is set about 2 to 3 times the prefault load current, the OC
threshold value based on current magnitude is IThreshold = 2IPrefault, such that;
2
FaultThreshold
Prefault
IM
I= (4.62)
where MThreshold is the ratio of the fault current IFault to IThreshold and is taken as OC
threshold parameter in the proposed scheme. Using (4.62), MThreshold can have a
minimum and maximum of 0.5 and ≥ 1.0 per unit and correspond to MThresholdmin and
MThresholdmax respectively. The increase in current magnitude, Iinc is compared with
MThreshold to declare a fault. The following scaling factor is applied to Iinc for
comparison, MThresholdmin(1+Iinc) such that, Iincmin = 0.5(1+0) = 0.5 and Iincmax =
0.5(1+1) = 1.0. Considering noise and other factors including transient disturbances,
the threshold is set at 15% above prefault value such that MThresholdmin = 0.575 and
MThresholdmax = 1.15 per unit. It must be noted that the 15% above minimum and
maximum values of MThreshold for noise consideration is not based on any criteria,
however has been selected based on the value used by Gautam and Brahma [78] .
This value is subject to review for different fault conditions, network configuration,
level of DER penetration, noise level, etc. This, for initial fault detection, if 0.575 <
MThreshold < 1.15, then DD flag is activated, followed by L2 flag to initiate HIF
feature extraction and classification process discussed in Chapter 5. For OC
parameter setting, the maximum value is considered, thus a fault current increase of
greater than or equal to 1.15 pu must be detected to initiate the OC protection.
4.6.2 Overcurrent Fault Detection Timer and Counter Parameters
Supposing a fault occurs such that, Iinc > 1.15, then Timer and Counter
parameters are used to count the consecutive number of tall edge MFD spikes with
increased heights above the OC MThresholdmax of 1.15 pu within OC fault detection
delay (Tdmax) of 15.3125ms. This is the time delay in which a fault must be declared
and is considered as the waiting time. Moreover, within the fault detection time
delay, a minimum of two MFDTall spikes must be detected to declare OC fault. To set
the counter value, the following has been considered. Within Tdmax, there are five
edge spikes, and the edge spikes can come in the following combinations, two
MFDTall spikes with three MFDShort spikes or three MFDTall spikes with two MFDShort
spikes. Considering that fault detection is based on MFDTall spikes, a minimum of

104 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
two MFDTall spikes exist, hence, the counter value is set at two. It must be noted that,
if two tall edge spikes are detected before Tdmax lapses, the algorithm will not activate
L1 flag, both Counter and Timer conditions must be satisfied for the OC protection
procedure to proceed any further.
Figure 4.6: Flowchart showing the OC fault detection process
4.7 SIMULATIONS AND DISCUSSION
The impact of PV penetration on the fault current magnitude at the feeder
substation, and its implications on the feeder OC protection are demonstrated with
two cases. The simulated conditions are analysed with the proposed algorithm to
demonstrate its attributes in fault detection.

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 105
4.7.1 Simulation System Description
To test and verify the effectiveness of the proposed adaptive overcurrent
protection scheme for radial distribution network feeder, and test system was
modelled in MATLAB/Simulink. The layout of the testbed for simulations to analyse
the impact of PV penetration on radial distribution feeder overcurrent protection is
shown in Figure 4.7. The testbed was modelled using power system device objects
available in Simscape tool box in the Simulink library. The distribution feeder was
modelled to operate at a nominal system voltage of 25kV with system frequency of
50Hz. The synchronous generator source at the substation represents power supply
from the grid, and has total generating capacity of 5MW. The total distance of the
feeder is 30km, thus a short line model is used for each line segment between the PV
systems with positive- and zero- sequence impedances, z(1) = 0.1153 + j0.53 Ω/km
and z(0) = 0.413 + j1.043 Ω/km respectively. The system is comprised of four PV
systems connected along the feeder length. The distance to PV systems from the
feeder substation are; PV1 = 0.5 km, PV2 = 10 km, PV2 = 20 km and PV4 = 30 km.
Each tapped load is P = 1.1MW and Q = 0.15 Mvar. The complete distribution feeder
system with PV penetration incorporates measurement, interfacing as well as control
devices.
Figure 4.7: Test feeder for modelled in Simulink for simulations
4.7.2 Characteristics of the Test System Components:
Instrument transformers: Instrument transformers include voltage transformer
(VT) as well as current transformer (CT). These are located at the substation, and the
fault signal inputs are taken from the secondary of the VT and CT. While both types
of instrument transformers are shown, the OC protection uses CT to measure the
PV1 PV2 PV3
Substation
25kV,
50Hz
PCC
V, I Measurements
PV4
Load
260V/25kV
50Hz
Δ/Y
DOCAS
CT
VT
SS
LoadLoadLoad Load
FP2FP1 FP3 FP4

106 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
fault current signal as input to the DOCAS algorithm. In the simulation, the CT is
model with turns ratio of 500:1 and operates in the linear of the saturation
characteristic curve. The efficiency of the CT has not been considered in the
modelling on the assumption that, losses are minimal, thus CT operates at near rated
efficiency.
Distribution transformers: Each PV system is connected to the main feeder
through a 600kVA, 50 Hz, 260V/25kV delta/wye distribution transformer with wye
grounded. The transformer generally provides a galvanic isolation between the PV
system and main feeder.
Photovoltaic Systems: Each PV system is modelled identically to generate
500kW at 260V DC. A PV system is comprised of five 100kW PV strings. Each 100
kW PV string has 64 parallel strings with 5 series connected PV modules. The PV
module used are SunPower SPR-315E-WHT-D found in the Simscape library in
MATLAB/Simulink [167] with following characteristics; maximum power =
315.072 W, open circuit voltage, Voc = 64.4 V, short circuit current, Isc = 6.14 A.
The voltage and current at maximum power point are Vmpp = 54.7 V and Impp = 5.76
A. The equation that models the current output of each PV module is give in (4.1)
[168], [169].
exp 1s spp PV o
t ss p
V IR V IRI N I I
V N R
+ + = − − −
(4.63)
where Nss and Npp are number of series and parallel connected cells in the PV
module. The parameters are defined as follows:
IPV is the current generated by the incident light
Io is the diode reverse saturation current
Vt is the thermal voltage of PV module, such that Vt = NsskT/q, where k
is the Boltzmann constant (1.3806503 x 10-23 J/K), q is the electron
charge (1.60217646 x 10-19 C), T is the temperature of the p-j
junction.
Rs, RP are the series resistance and parallel resistances respectively.
The current versus voltage (I-V) and power versus voltage (P-V) curves at
standard test condition (STC), 1000W/m2, 25ºC for each 100kW PV string is shown

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 107
in Figure.4.8. The system voltage (VMPP) and current (IMPP) at maximum power point
(MPP) respectively are 273.5 V DC and 368.6 A.
Figure 4.8: Characteristic curves for the PV strings at STC, (a) I-V and (b) P-V curves
DC-DC boost converters: The PV system DC voltage is unregulated, and
fluctuates with variation in solar irradiation and temperature [170]. Thus, to maintain
a stable voltage at constant value, a DC-DC converter is required. The inverter
requires input voltage of 500 V DC; thus a DC-DC boost converter was used to boost
the PV string voltage from 270 V to 500 V DC. The DC-DC boost converter used in
the test system is an averaging switch-mode converter using pulse-width modulation
(PWM) with voltage control. It is not within the scope of this research to provide
comprehensive analysis of available DC-DC converter technology. However, the
intention is to state the function of the converter and type used in the model. Thus, a
brief theoretical background on the averaged DC-DC converter is provided. A circuit
describing the topology of a boost converter with MOSFET and diode switching is
shown Figure 4.9.
Figure 4.9: Circuit topology of a DC-DC boost converter [171]

108 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
To analyse the boost converter circuit in Figure 4.9, we consider the switching
intervals of Q1 and D1.
Interval 1: Q1 is in “on” state and D1 “off”, the sections of the circuit after and
before the diode become isolated. The inductor L is shorted to ground. Under this
condition we derive the following equations [171];
L inv V= (4.64)
outC
Vi
R= − (4.65)
Interval 2: Q1 is in “off” state and D1 “on”, the inductor L is in series with
diode. Under this condition we derive the following equations;
L in outv V V= − (4.66)
outC L
Vi i
R= − (4.67)
It is assumed that voltage and current ripples are very small, thus iL = I; then
outC
Vi I
R= − (4.68)
Using the switching intervals, and the voltage across the inductor, vL(t) and the
capacitor through current, iC(t) can be represented graphically as shown in Figures
4.10(a) and (b) respectively. The area under the curves in the plots of Figure 4.10(a)
and (b) are equated to zero in steady state as given by (4.69) and (4.70) respective.
Figure 4.10: Switching waveforms for the voltage and current in the DC-DC boost converter

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 109
0 ( ) (1 )( )in in outD V D V V= + − − (4.69)
0 ( ) (1 )( )out outV VD D I
R R= − + − − (4.70)
The parameter D is the on/off duty cycle where D = Vout/Vin = Ton/Toff. The steady
state output voltage and the inductor current can be respectively solved from (4.69)
and (4.70) as defined by equations (4.71) and (4.72) respectively.
1
1out inV V
D=
− (4.71)
( )2 2
1 1 1
1 11
out in inV V VI
D R R RDD= = =
− +− (4.72)
Equation (4.71) shows that, by increasing D in the range, 0 < D < 1, the output
voltage can be made larger than the input voltage. At D = 0, the output voltage is
equal to the input voltage. The output current is determined according to (4.71), and
by inspection, the output current will be lower than the input current for the same
value of D applied in both equations.
In PV systems, the voltage and current are unregulated due to the changing
solar irradiance and temperature. This can be visualised by varying the temperature
in the 100kW PV string in the test system. Plots of I-V and P-V curves at
temperatures of 25ºC, 30ºC and 40ºC for the 100kW strings are shown in Figure
4.11.
Figure 4.11: Characteristic curves for the PV strings at STC, (a) I-V and (b) P-V curves
with increased temperatures

110 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Under test these conditions the PV strings operate at lower MPP where the
respective VMPP are; 273.5 V, 268.6 V and 259.5V. The decrease in power is related
to the temperature coefficient of material in the PV modules [172]. There is minimal
change in the current due to temperature change where the respective currents at the
new MPP due to changing temperature are; 368.6 A, 369.7 A, and 370.9 A. The
impact of current is normally significant with changing irradiance. Under different
ambient conditions (change in temperature and irradiance) which the PV systems are
subjected to, the MPP changes. It is expected that under these conditions, the DC bus
voltage must be kept constant. This can be achieved by appropriately scaling the
value of D in equation (4.8).
Maximum Power Point Tracking (MPPT): In PV systems, the MPPT
algorithm is used in conjunction with the DC-DC boost converter by appropriately
adjusting the value of D to maintain a constant DC voltage output at different MMP.
Several different MPPT algorithms have been proposed, including Perturb and
Observe, Incremental Conductance and Fuzzy logic methods [173], [174]. The
MPPT algorithm used in the simulation system is the Perturb and Observe (P&O)
algorithm. The choice of this algorithm was based on simplicity and speed of
execution based on only two inputs as compared to the other popular method, the
incremental conductance method which requires four input parameters including
incremental and instantaneous PV array conductance and VMPP and IMPP [175], [176].
Moreover, the P&O algorithm was selected on the assumption that the simulated
faults occur under steady state environmental conditions (slowly changing irradiance
and temperature). Furthermore, the algorithm is still widely used. The inherent lack
of speed in tracking the MPP and loss of power when subjected to rapidly changing
irradiance and temperature widely reported in literature regarding the P&O algorithm
can be reduced by increasing the sampling rate and the execution speed [177],[178].
The P&O algorithm works by periodical perturbation (increment or decrement)
of the array voltage and comparing the array output power with power output of the
previous perturbation cycle. If the power increases, the perturbation will continue in
the incremental direction in the next perturbation cycle, if otherwise, the perturbation
will reverse and go in the decremented direction. This process continues until the
new maximum power point is reached. To further illustrate the P&O algorithm,
supposing RMPP is the array characteristic impedance, such that RMPP = VMPP/IMPP,
and R is the array load impedance, for maximum power transfer to occur, RMPP = R.

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 111
RMPP depends on the operating environmental conditions, irradiance and temperature.
The P&O algorithm either increment or decrement the duty cycle D to control VMPP
to match RMPP to R.
DC-AC Inverter: The DC to AC converter used to interface the PV systems to
the radial feeder via the distribution transformer is the Voltage Source Converter
(VSC)[179] . The model used is the two-level average VSC model with six pulse
insulated gate bipolar transistor with inverse-parallel diodes. The VSC takes the 500
V DC from the DC-DC boost converter and converts it to 260 V AC, three-phase, 50
Hz output. A brief description of the VSC operation is provided herein. Figure 4.12
shows topology of the two-level VSC and the AC voltage output at one of the
phases. The two-level VSC model is an average model. As it is obvious from the
graph of output waveform, the positive and negative halves of the AC voltage output
are relative to the positive and negative half values of the DC input voltage taken at
the midpoint. There are three legs in the SVC topology with upper and lower IGBT
switches, S1 to S6. These legs, call phase-legs generate the phase AC voltages by
appropriate (complimentary) switching of the upper and lower IGBTs connected to
that leg. S1, S3 and S5 are the upper switches for phases A, B and C respectively
while S2, S4 and S6 are the lower switches for the respective phases. All the upper
switches are simultaneously in the “On” state for 180º (half fundamental period) with
phase shift of 60º between each other obtained through successive gating signal
between each IGBT. In the next 180º all the upper IGBT switches are in the “Off”
state and the lower IGBT switches are in the “On” state. Any simultaneous switch on
of the upper and lower IGBT switches in a phase-leg will result in short circuiting
that leg, thus this is avoided. The magnitude of the fundamental component of
generated AC output voltages at each phase is controlled by pulse width modulation
(PWM). Moreover, the PWM reduces harmonic content present in the voltage (and
current) signal.

112 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Figure 4.12:Circuit topology of two-level voltage source converter with a phase output
voltage waveform [179]
4.7.3 DC-offset Removal and Smoothing Filter
Referring to the block diagram layout of the OC fault detection system, the
fault current input signal undergoes several condition stages including DC offset
removal, smoothing ripples and fault current magnitude estimation. These processes
are demonstrated through simulation by considering a SLG on phase A of the test
system.
DC-offset Removal: In Figure 4.13(a), the fault current and the average MMF
output for a SLG fault are shown. The difference fault current signal, ∆i is shown in
Figure 4.13(b). The respective power spectral density plot for each signal is shown in
Figure 4.14. The fault current signal and the average MMF output show presence of
the exponentially decaying DC offset. This is confirmed by their respective power
spectral density (PSD) plots. The difference fault current signal shows no sign of
exponentially decaying DC offset. This can be confirmed by its PSD plot in Figure
4.14(c). However, the subtraction process in creating ∆i resulted in high frequency
ripples of odd harmonics as shown in the PSD plot.

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 113
Figure 4.13: Fault current signals with DC-offset, (a) The fault current signal and average
MMF output (b) Difference fault current signal.
Figure 4.14: Power spectral density plots for (a) fault current (b) average MMF output and
(c) difference fault current, ∆i.
Exponentially Weighted Moving Average Filter Output: An exponentially
weighted moving average (EWMA) filter was designed to smooth out the ripples in
the difference fault current signal. A weighted value of α = 0.2 was experimental
determine to give the best compromise between the harmonic distortion and delay.
The output of the EWMA filter is shown in Figure 4.15. Generally, a delay can be
noticed in the filtered output, however at the edges the two signals are almost in
phase. The edges determine the increase fault current magnitude.
The PSD plot of the EWMA filter output signal is shown in Figure 4.16. The
PSD plot shows significant reduction in the power of the odd harmonics, moreover,
the DC-offset has been eliminated.

114 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Figure 4.15: Difference fault current signal, ∆i and the EWMA filter output
Figure 4.16: Power spectral density of the EWMA filter output
Recursive Least Square Filter Output: The EWMA filtered version of the
difference fault current signal, ∆i provides input to the recursive least error square
filter for phasor estimation. The input and the output signals are presented in Figure
4.17 for comparison. It shows that the two signals are in phase and almost exact
replication of each other. Thus, it can be concluded that the magnitude estimation is
accurate.
Figure 4.17: RLSE filter signals (a)RLSE filter input signal, (b) RLSE filter output signal
4.7.4 Effect of Increased PV Penetration on Fault Current Magnitude
The effect of increasing PV penetration level on the feeder current magnitude
was simulated by decreasing the current contribution from the grid side by
decrementing the substation source power contribution while maintaining a fixed

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 115
lumped load at 5 MW. The substation source has a total capacity of 5 MW while the
total PV generation is 2 MW, thus decrementing the substation source contribution
allows for increased PV contribution to maintain the 5 MW supply. The PV systems
were maintained at a fixed irradiance of 300 W/m2 at 30°C for all simulations.
Prefault Condition: The substation source was decremented to allow
increasing PV penetration at 0, 28, 33, 44 and 50 percent. The MFD values for
prefault current magnitudes at these PV penetration levels for each phase of the
feeder are given in Table 4.1, and the results show that as the PV penetration level
increases, the MFD values decrease indicating decrease in the current magnitude at
the substation.
Table 4.1: Prefault current MFD values
Fault
Types Phase
MFD Output – Fault Current Magnitudes at
PV Penetration Level (%)
0 28 33 44 50
Prefault
A 0.0032 0.0013 0.0011 0.0010 0.0009
B 0.0042 0.0015 0.0013 0.0011 0.0011
C 0.0041 0.0014 0.0014 0.0013 0.0013
Feeder Fault Current Level without PV Penetration: several short circuit
fault conditions including, single line-to-ground, (SLG), line-to-line-ground (LLG)
and three-phase (3-ph) faults were simulated at locations 1, 2, 3 and 4 respectively
designated FP1, FP2, FP3 and FP4 on the simulation system. The MFD values of the
fault current magnitude for each type of simulated fault are tabulated in Table 4.2.
The results in Table 4.2 are consistent and reflect the fact that current
magnitude reduces due to the increasing line impedance as the fault distance
increase. However, it must be noted that, since there is no PV penetration, and the
only influencing factor is the Thevenin equivalent line impedance seen at the fault
location assuming the fault impedance is zero.
Table 4.2: Fault current MFD values at fault locations along feeder length.
PV
Level
(%)
Fault
Types Phase
MFD Output-Fault Current Mag
Fault Locations
1 2 3 4
0
SLG A 0.0102 0.0096 0.0091 0.0086
LLG A 0.0091 0.0088 0.0084 0.0082
B 0.0101 0.0098 0.0091 0.0086
3-Ph
A 0.0084 0.0082 0.0080 0.0078
B 0.0080 0.0079 0.0077 0.0075
C 0.0078 0.0077 0.0074 0.0072

116 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Using the MFD data recorded in Tables 4.1 and 4.2, the fault current increase in each
phase can be calculated using (4.61) for different faults types at the specified location
for case. Cases of fault current increase in phase A under the simulated fault
conditions without PV penetration are given in Table 4.3. The other two phases can
be treated in the same manner. The results show that, even without any PV
penetration, the fault current magnitude decreases with increased fault distance.
Table 4.3: Increase in fault current magnitude at different fault location
Fault
Types
Increase in the fault current magnitude
for 0% PV at different locations
1 2 3 4
SLG 2.1875 2.0000 1.8438 1.6875
LLG 1.8438 1.7500 1.6250 1.5625
3-Ph 1.6250 1.5625 1.5000 1.4375
Feeder Fault Current Level with PV Penetration: Different fault conditions,
including SLG, LLG and 3-ph faults were simulated at fault location 2 with different
PV penetration level. The results of the MFD outputs are given in Table 4.4. where
the results show the trend already established where increasing PV penetration
results in reduction in fault current magnitude at the feeder substation. To further
illustrate this trend, magnitude output of the RLSE filter and the MFD are shown in
Figures 4.18 and 4.19 respectively for PV penetration levels of 0%, 28% and 33%.
Table 4.4: MFD values fault currents for faults at Fault location 2
Fault
Types Phase
MFD Output – Fault Current Magnitudes at
PV Penetration Level (%)
0 28 33 44 50
SLG A 0.0096 0.0086 0.0071 0.0060 0.0053
LLG A 0.0088 0.0083 0.0077 0.0059 0.0047
B 0.0098 0.0082 0.0067 0.0055 0.0054
3-Ph
A 0.0082 0.0081 0.0065 0.0050 0.0042
B 0.0079 0.0077 0.0062 0.0052 0.0040
C 0.0077 0.0071 0.0064 0.0040 0.0039

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 117
Figure 4.18: RLSE filter magnitude response for SLG fault at fault location 2 at 0%, 28%
and 33% PV penetration
Figure 4.19: MFD output corresponding to fault current magnitude for SLG fault at fault
location 2 at 0%, 28% and 33% PV penetration.
Application of equation (4.61) to calculate the level of increase in fault current
magnitude for distribution feeder will give an incorrect trend with increasing PV
penetration as the fault current magnitude increases with increased PV penetration.
This trend is demonstrated by applying equation (4.61) to MFD values for phase A
current for the different faults in Table 4.4. The results of the calculation are shown
in Table 4.5.
Table 4.5: Fault current increase at various PV levels for faults at location 2
Fault
Types
Inc. in Fault Mag. using (4.61)
at given PV Levels (%)
0 28 33 44 50
SLG 2.0000 5.6154 5.4545 5.0000 4.8889
LLG 1.7500 5.3846 6.0000 4.9000 4.2222
3-Ph 1.5625 5.2308 4.9091 4.0000 3.6667
The maximum fault current under any fault condition would occur at fault
location nearest to the relay, and in this case nearest to the feeder substation, and at
zero PV penetration. The maximum fault current occurs at location 1 (FP1) at 0%
PV, thus referring back to the results in Table 4.3, the highest increase in fault
current magnitude is 2.1875 pu for SLG fault on phase A. All increase in fault

118 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
current magnitudes in phase A will be lower than this value, thus this is defined as
Iincmax. With increasing PV penetration, any fault along the feeder length will result in
lower current magnitude compared to Iincmax. To account for this, fault increases at
different PV penetration levels and fault locations are made relative to Iincmax. The
relative increase in fault current magnitude from without PV penetration to with PV
penetration can be computed according to (4.73);
( )
max
( _ )
Fault PV
incRel inc
Fault No PV
II I
I= (4.73)
where IincRel. is the increase in fault current magnitude relative to the maximum
fault current increase without PV penetration. IFault(PV) and IFault(No_PV) are the fault
current magnitudes with and without PV penetration respectively represented by
respective MFD values.
Using MFD data in Tables 4.1 and 4.4, the relative increase in fault current
magnitude at the given PV penetration levels for various fault conditions at fault
location 2, calculated using (4.73) are given in Table 4.6. The trend shown by the
results in Table 4.6 indicate that, the fault current magnitude decreases with
increased PV penetration level.
Table 4.6: Increase fault current magnitude at different PV level for fault a location 2
Fault
Types
Relative pu Increase in Fault Current Magnitude
at given PV Levels using (4.73)
0% 28% 33% 44% 50%
SLG 2.0000 1.7917 1.4792 1.2500 1.1042
LLG 1.7500 1.6506 1.5313 1.1733 0.9347
3-Ph 1.5625 1.5434 1.2386 0.9527 0.8003
Supposing the main feeder relay has total reach up to location 4, then a fixed
pu threshold (pickup) value using the prefault and fault MFD values for the same
fault at location 4 in Tables 4.1 and 4.2 respectively can be calculated using (4.62)
giving 1.4015625 pu. A trend can be observed by comparing the different pu fault
current increases in Table 4.6 with the fixed threshold value which suggests that the
relay will under reach for some fault conditions at 33% PV penetration and all faults
occurring at 44% and 50% PV penetration levels for faults at location 2. This trend is
graphically illustrated in Figure 4.20. In Figure 4.20(a), the MFD values for the fault
current magnitude decrease with increased PV penetration. Similarly, the pu fault
level increase using (4.73) in Figure 4.20(b) decreases with increased PV

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 119
penetration, and begins to under reach at 33% PV where the fault increase drop
below Mpickup which is a fixed threshold. In Figure 4.20(c), a different trend is
established using (4.61). The trend generally shows that the pu increase in fault
current magnitude decreases with increased PV penetration. However, the pu
increase in fault current magnitude is significantly higher than the actual increase in
fault magnitude as indicated by the trend in Figure 4.20(b). This trend helps define
the basis for the adaptive OC protection scheme developed in this thesis and
described in section 4.8.
Figure 4.20: MFD output corresponding to fault current magnitude for SLG fault at fault
location 2 at 0%, 28% and 33%, 44% and 50% PV penetration levels.
4.7.5 Effect of Increased Fault Distance with PV Penetration on Fault Current
Magnitude
The same fault conditions in subsection 4.74 were simulated at different fault
points and currents measurements were recorded 28% PV level. The distance to the
fault locations from the substation are; FP1 = 7.5 km, FP2 = 12.5 km, FP3 = 17.5 km
and FP4 = 25.5 km.
Feeder Fault Current Level with Increased Fault Distance with PV
Penetration: Fault conditions were simulated at fault location 1, 2, 3 and 4
respectively designated FP1, FP2, FP3 and FP4 along the feeder. The MFD values for
the fault current seen by the substation feeder relay are tabulated in Table 4.7. The
decrease in fault current magnitude with fault distance under PV penetration can be
observed in the results and demonstrated graphically in Figures 4.21 and 4.22.

120 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Figure 4.21: RLSE filter magnitude response for SLG fault at fault locations 1, 2 and 3 at
28%
Figure 4.22: MFD output corresponding to fault current magnitude for SLG fault at fault
locations 1,2 and 3 at 28% PV penetration.
Application of (4.61) to establish the general trend on the impact of increased
fault distance under PV penetration gives an incorrect scenario as demonstrated by
the results in Table 4.8. The increase in fault current seems high; however, the actual
fault current magnitude is still lower than the fault current for the SLG fault at
location 1 without PV. The general trend shows decrease in fault current magnitude
as fault distance increases.
Table 4.7: Fault level increase at different fault location at 28% PV penetration
Fault
Types
Increase in Fault Current Magnitude relative to maximum fault current
at 28% PV at given Locations using (4.73)
1 2 3 4
SLG 1.9945 1.7917 1.6209 1.4520
LLG 1.8032 1.6506 1.4702 1.3529
3-Ph 1.6057 1.5434 1.4438 1.3638
The impact on the fault current can be further analysed by using (4.73) to
calculate the relative increase in fault current magnitude with increased fault distance
under PV penetration. The results from this calculation are tabulated in Table 4.9,
and graphically illustrated in Figure 4.23.
Figure 4.23(a) shows the decrease in fault current magnitude due to increased
fault distance without PV penetration using (4.73). It can be observed that the relay

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 121
can maintain its distance of coverage without under reaching. Figure 4.23(b) shows
similar trend as in Figure 4.23(a) the case of increased fault distance with 28% PV
penetration. However, in this case the reach of the relay is decreased and the relay
under reaches at location for the LLG and 3-Ph faults when a fixed pick up threshold
is applied. The reach of the relay is affected by increased PV penetration, and as the
distance to fault increases, the relay will not be able to maintain its coverage of the
feeder.
Consider the case of the SLG fault, at 0% PV penetration, a SLG fault at
location 1 registered an increase of 2.1875 pu (Iincmax), and at location 4, the same
type of fault registered an increase in fault current magnitude of 1.6875 as given in
Table 4.3. This is a decrease of 23%. Consider the same fault at 28% PV penetration.
At fault location 1, the increase is 1.9945 and at fault location 4 the increase is
1.4520 pu as shown in Table 4.9. This is a decrease of 25%. When considered in
terms of Iincmax, the SLG fault at location 4 with 28% PV penetration results in a
reduced fault magnitude of 38%. This trend shows that increased PV penetration will
have an impact on the existing feeder protection system device coordination based on
passive unidirectional current flow. Moreover, it also shows that the relay will under
reach much faster than it would have without PV penetration.
While it was shown that fault current magnitude decreases with increased PV
penetration, a different trend was observed when directly applying (4.61), where the
increase in fault current magnitude is quite significant even with PV penetration as
was shown in Tables 4.5 and 4.8, and graphically illustrated in Figure 4.23(c). The
increase in fault current magnitude determined using equation (4.61) is adaptive to
any change in current magnitude influenced by PV penetration, load change and
network topology change, etc. Moreover, the threshold parameter defined in equation
(4.62) is made adaptive due to the memory update every 9.6875ms defined in section
3.5.5. Thus, a scheme for adaptive inverse time overcurrent (ITOC) relaying based
on equations (4.61) and (4.62) and applying appropriate scaling to the fault current
increases determine using equation (4.73) given in Tables 4.6 and 4.9 can be
designed and appropriately matched to a standard ITOC relay curve.

122 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
Table 4.8: Increase in fault current magnitude at different fault distance 28% PV
Fault
Types
Inc. in Fault Mag. using (4.61)
for 28% PV at given Locations
1 2 3 4
SLG 6.1538 5.6154 5.2538 4.6923
LLG 5.8446 5.3846 4.8462 4.4625
3-Ph 5.3846 5.2308 4.9231 4.6923
Figure 4.23: MFD output corresponding to fault current magnitude for SLG fault at fault
location 2 at (a) 0% and 28% PV penetration.
4.8 INVERSE-TIME OVER CURRENT RELAYING USING MFD OUTPUT
SIGNAL
The inverse time overcurrent relaying (ITOC) parameters for adaptive feeder
overcurrent protection are determined as defined herein.
4.8.1 Relay Pickup Parameters
In the OC protection scheme, a disturbance must be detected and tested against a
threshold constraint to determine if the disturbance is a fault within a certain time
constraint before trip signal can be issued.
A OC fault condition is said to exists if Iinc > MThreshold, Therefore, this
condition must be satisfied before the procedure to determine the relay trip time
described herein can be initiated. The increase in current magnitude, Iinc based on the
MFDTall values was determine as Iinc = (Imax(w) – Imax(w + 1)) / Imax(w + 1) = (IFault -
IPrefault) / IPrefault. The relay pickup parameters also based on the MFDTall values are
defined as follows; │I│= IFault and │Ipickup│= 2IPrefault) such that; M =| I |/|

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 123
Ipickup |. The values of M must fall within a range defined by Mmin < M < Mmax, where
these are defined as follows;
Mmin = 1, where | I | = | Ipickup |,
Mmax = IFault_No_PV(max)/2IPrefault_No_PV(max)
The minimum value of Mpickup is set at 15 percent above Mmin, such that, Mpickup =
1.15Mmin. The value for Mmax is determined by means of power flow algorithm and is
updated only when major network changes occur. Moreover, the Mmax is based on the
prefault and fault current values without the penetration of PV such that,
IFault_No_PV(max) is the maximum fault current without PV and IPrefault_No_PV(max) is the
maximum prefault current without PV.
Increased penetration of the PV reduces the fault current magnitude on the
feeder, thus to account for this, all values of M are calculated as a ratio of Mmax
defined by (4.74),
_
max
_ _ (max)
Fault PV
Rel
Fault No PV
IM M
I= (4.74)
where MRel. is the value of M relative to Mmax and IFault_PV is the fault current with PV
penetration. It must be noted that, for all fault conditions at any point on the feeder
under any PV penetration level, load condition or network topology, the value of
Mpickup has to be maintained. This is the minimum point on the Inverse Time
Overcurrent (ITOC) relay curve. Therefore, all other M values must be shifted to the
right on the relay curve (above Mpickup) to compensate for the reduction in fault
current magnitude with increasing PV level. The compensated value of M is then
given by (4.75);
Comp Rel pickupM M M= + (4.75)
where MComp is compensated M value considering the dynamic variation in
feeder current magnitude influenced by factors such different PV penetration level,
load condition, network topology change.
The case for SLG fault on phase A at different PV penetration levels and fault
locations can be used to demonstrate the proposed ITOC relaying strategy for
adaptive feeder OC protection. For this purpose, the value of Mmax using the MFD

124 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
values for prefault current recorded in Table 4.1 and MFD value for the maximum
fault current without PV penetration for the SLG fault at location 1 given in Table
4.2 is, (0.0102 / (2 x 0.0032)) = 1.59375. Following the procedure defined in (4.74)
and (4,75), the fully compensated MComp values for the SLG faults, taking into
consideration the effect of increased PV penetration and fault distance are calculated
and tabulated in Table 4.10 and Table 4.11 respectively. The MComp values are
adaptive, however they must operate on a certain relay operating curve to determine
the relay operating time.
4.8.2 Relay Operating Time
To determine appropriate relay operating times, the MComp values must be
plotted on to a standard digital relay curve. The standard moderately inverse ITOC
relay curve defined by (2.1) with current tap setting (CTS) parameters, A = 0.0515, B
= 0.1140 and ρ = 0.02 given in Table 2.1 and TDS = 1 shown in Figure 4.24 is used
to demonstrate this. The relay operating range is defined as Mpickup < MComp <
MCompmax. The Mmax value without PV penetration was determined to be 1.59375, and
following the procedure defined in (4.74) and (4.75) the compensated maximum M
value is 2.74375. Therefore, MComp values must fall within the range defined by 1.15
< MComp < 2.74375. All values of MComp in Tables 4.10 and 4.11 fall within this
range, and therefore can be easily plotted on this curve. It is noted that, at different
values of Ipickup (=2IPrefaul), Mmin = I/Ipickup is always 1 giving the same Mpickup =
1.15Mmin. The maximum relay pickup time (Ttripmax) corresponds to Mpickup and is
maintain irrespective of the PV penetration level or fault location.
Figure 4.24: Standard moderately inverse ITOC relay curve with M values in Table 4.10

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 125
Table 4.9: Per unit increases (M) in fault current magnitude at different PV levels at FP2
MFD Trip
Parameters
Fault at different PV Levels at Location 2 (FP2)
0% 28% 33% 44% 50%
Ipickup 0.0064 0.0026 0.0022 0.0022 0.0018
M 1.5000 3.3077 3.2273 3.0000 2.9444
MRel. 1.5000 1.3438 1.1094 0.9375 0.8281
MComp 2.6500 2.4938 2.2594 2.0875 1.9781
Table 4.10: Per unit increases (M) in fault current magnitude at different fault locations
MFD Trip
Parameters
Fault at different Locations for 28% PV
1 2 3 4
Ipickup 0.0026 0.0026 0.0026 0.0026
M 3.5769 3.3077 3.0769 2.8462
MRel. 1.4531 1.3438 1.2500 1.1563
MComp 2.6031 2.4938 2.4000 2.3063
The corresponding operating times for the SLG fault under consideration are
shown in Tables 4.12 and 4.13 for PV penetration level and fault distance. Note that
the maximum trip time (Ttripmax) is 18.512s which corresponds to Mpickup = 1.15Mmin
irrespective of the PV penetration level and fault distance. Moreover, the minimum
trip time (Ttripmin) is also maintained as it corresponds to Mmax and is associated with
fault condition without PV penetration. In Table 4.12, it can be noted that the time to
trip (Ttrip) increases with increasing PV penetration for fault at the same location. To
obtain same trip time, the CTS trip parameters A, B and ρ have to be redefined or
redesigned as part of the future work. The trip times (also relay pick up times) in
Table 4.13 are consistent, where time to trip increases with fault distance.
Table 4.11: Trip times at different PV levels
Trip Times
(s)
Fault at different PV Levels at Location 2
0% 28% 33% 44% 50%
MComp 2.6500 2.4938 2.2594 2.0875 1.9781
Ttripmax 18.512 18.512 18.512 18.512 18.512
Ttrip 2.7311 2.9068 3.2481 3.5878 3.8639
Ttripmin 2.6400 2.6400 2.6400 2.6400 2.6400
Table 4.12: Trip times at different fault distance
Trip Times
(s)
Fault at different Locations for 28% PV
1 2 3 4
MComp 2.6031 2.4938 2.4000 2.3063
Ttripmax 18.512 18.512 18.512 18.512
Trip 2.7804 2.9068 3.0307 3.3430
Ttripmin 2.6400 2.6400 2.6400 2.6400

126 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
By selecting appropriate TDS values faster or slower operating time can be
selected as illustrated in Figure 4.25.
Figure 4.25: ITOC relay curves at various TDS values
4.8.3 Cases with Lower Increase in Current Magnitude
In Table 4.6, some cases of fault conditions under increased PV penetration
resulted in the increase in fault current magnitudes falling below the Mpickup when
equation (4.73) was applied. These cases include, SLF at 50% PV penetration, LLG
at 50%, 3-Ph at 44% and 3-Ph at 50% with respective increases in fault current
magnitude of 1.1042, 0.9346, 0.9527 and 0.8003. The application of equation (4.61)
to these cases gives the following Iinc values, 4.8889, 4.2222, 4.0 and 3.6667
respectively. The condition for declaring a fault and initiating the ITOC relay
sequence for trip time is Iinc > Mpickup, and for all cases this condition has been
satisfied. Applying the procedure defined in (4.74) -(4.75) resulted in the following
MComp values; 1.9781, 1.8844, 1.9313 and 1.8063 respectively for each case. These
values must fall within the range 1.15 < MComp < 2.74375, hence can be
accommodated on the selected ITOC relay curve.
4.9 CONCLUSION
In analysing the effect of PV penetration on feeder current magnitude,
particularly the fault current contribution by the substation source, a theoretical
method was established in terms of two factors, the distance to PV system and the
distance to fault as ratios of the total feeder distance. It was shown analytically
through the derived relationship that increased PV penetration will result in increased

Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs 127
fault current contribution from the PV systems, and consequently reducing the fault
current contribution from the substation source. Moreover, it was shown that with
increased PV penetration, and fault occurring at distance along the feeder length will
result in reduced Thevenin impedance seen at the point of fault allowing high fault
current contribution by the PV systems. The implication in terms of feeder OC
protection is that increased PV penetration will affect the fixed OC protection pickup
setting of the relays and ACRs thus affecting the protection coordination. The
theoretical analysis was verified through simulations. The proposed feeder OC
protection strategy using the DOCAS algorithm includes other features including
DC-offset suppression and fault current magnitude estimation. A fast DC-offset
suppression technique requiring no parameter estimation was achieved through
subtraction of the fault current and the average MMF output. This method incurred
no additional computational overhead as the process is an integrated part of the
algorithm in fault detection and imposes no additional delay in fault detection. A
feature for fault current magnitude estimation through a RLSE filter is incorporated
in the fault detection and diagnostic tool. The performance and functional attributes
of these features were verified through simulations and were seen to have performed
as expected without compromising the overall feeder OC protection using the
DOCAS algorithm.
The reduction in the fault current magnitude contribution by the feeder
substation source was analysed through simulation of fault conditions including
SLG, DLG, and 3-Ph faults under different PV penetration levels at fixed fault
location (FP2). It was observed that, with increased PV penetration, the fault current
contribution from the substation source reduced accordingly. Further simulations
involving the same fault conditions, at a fixed PV level (28%) and different fault
distance along the feeder length were simulated. It was observed that as fault
distance increased, the fault current magnitude seen at the feeder substation
decreased. Moreover, with PV penetration at 28%, it was observed that the fault
current contribution by the substation source was lower for the same fault conditions
at the same fault location for the case without PV penetration. This shows that the
relay will under reach faster with PV penetration and fault occurring at distance
further from the substation.
The maximum fault current would occur at a point nearest to the substation
without any PV penetration as demonstrated by the simulation results. All fault

128 Chapter 4: Adaptive Overcurrent Protection in Active Radial Distribution Feeders with RE Based DERs
currents; for faults along the feeder length either with or without PV will be less than
this current. The trends in the reduction of the fault current magnitude were verified
through simulation of faults at locations along the feeder and measuring the fault
current magnitudes at feeder substation. Moreover, the trends in the reduced fault
current magnitude were established through developing relationship as a ratio of the
maximum fault current measured without PV penetration.
While it was observed that fault current contribution from the feeder substation
source decreased with increased PV penetration and fault distance, a different trend
was observed when computing the actual percentage increase in percentage rather
than the actual magnitude using the concept of dynamic memory update. The MFD
value of the tall edge spike in the memory is used to calculate the percentage/per unit
increase. It must be reiterated that the MFD value in the memory before the fault is
used to determine the increase, and only updated when the fault is cleared. It was
observed through this analysis that the percentage increase in fault current magnitude
was significantly higher as compared to increase in the actual fault current magnitude
for each type of fault. Based on this observation, a strategy for declaring an OC fault
using the percentage increase in fault current magnitude in conjunction with the
adaptive feeder OC protection threshold (pickup) parameter was proposed. The
adaptiveness and scalability of the strategy was demonstrated by applying inverse-
time overcurrent (ITOC) protection strategy. A minimum time delay of ¾ cycles + 1
sample which is defined as Tdmax = 15.3125 ms is required to declare a OC fault
before the ITOC relaying is initiated to determine the trip time. The proposed method
showed that irrespective of the fault location under any PV penetration level, the
relay threshold (pickup) value was always maintained at the same pickup value.
Furthermore, it was observed that protection coordination can be achieved at
different PV penetration level by appropriately selecting relay curves at different
TDS values.

Chapter 5: HIF Detection and Classification in Distribution Feeders 129
Chapter 5: HIF Detection and Classification in
Distribution Feeders
5.1 INTRODUCTION
High Impedance Faults are common in MV and LV distribution networks, and
often are quite difficult to detect. The distribution network feeder protection system is
contingent on detection of fault current magnitude surpassing the OC pickup
threshold setting on the feeder OC relay. The HIFs generally result in much lower
current magnitude which makes the OC protection system ineffective against such
faults. From the review it was concluded that, while the techniques proposed by
researchers contribute to the knowledge towards developing a universal HIF detection
scheme, there is scope for more research. The existing OC protection system
technology has serious limitations in securely detecting and identifying HIFs. This is
due to the fact that, HIFs are complex and highly random. HIF detection technique
based on just one feature of HIF will not be applicable in another as no two HIF cases
exhibit the same characteristics. As more research continues, combination of different
techniques and methods could evolve into the development of a universal system for
reliable HIF detection and classification. When HIFs remain uncleared, the risk to
public safety and fire hazard increase.
In this chapter, the application of DOCAS algorithm in HIF detection and
classification using several classifiers using the MFD output signal is demonstrated.
Cases of HIFs were simulated using the IEEE 13 bus test system. Moreover, different
contact surfaces were simulated by randomly changing the effective resistance and
the voltage and current signal were recorded. Moreover, non HIF conditions were
simulated to differentiate the non-HIF characteristics from the HIF characteristics.
The DOCAS algorithm was used to analyse these cases to verify the effectiveness of
the DOCAS algorithm in HIF feature extraction and classification based on the MFD
output signal. A HIF detection and classification technique based on two HIF
characteristics, namely the randomness and the HIF arc extinction and re-ignition
characteristics is presented.
In section 5.2, the proposed the HIF detection and classification technique
presented. In section 5.3, describes the process in the application of the DOCAS

130 Chapter 5: HIF Detection and Classification in Distribution Feeders
MDF output in HIF feature extraction. In section 5.4 simulation and discussions are
presented followed by conclusion in section 5.6.
5.2 PROPOSED METHOD FOR HIF DETECTION AND CLASSIFICATION
The structure of the proposed algorithm for HIF detection and classification
developed from this research is shown in Figure 5.1. Notably, the block diagram
structure of Figure 5.1 is the DOCAS MFD algorithm.
The mathematical derivations and the operation attributes of this algorithm
were discussed in detail in Chapter 3, therefore no mathematical derivations are
provided in this chapter. This chapter discuss the application of the DOCAS MFD
algorithm for HIF detection and classification. The DOCAS MFD algorithm is a
multistage Morphological filter, constructed from two nonlinear MM filters called
the morphological median filter (MMF) and the Alternating Sequential Filters (ASF).
As was previously discussed, MM is a nonlinear image/signal processing technique
that analyses the topography of the input signals waveforms by means of a probing
signal called the structuring element (SE) in complete time domain. The SE is the
filtering signal that provides general functional attributes of the MM signal
processing technique. MM can detect seemingly insignificant changes in the
topography of the signal waveform being investigated, thus making it convenient for
the detection and classification of HIFs.
The DOCAS MFD algorithm extract features from the HIF current to detect
and classify HIFs based on two HIF identifying characteristics, 1) randomness, due
to randomly changing the effective fault resistance, Rf resulting in erratic fault
current waveform and, 2) arc extinction and re-ignition of the AC HIF arc around the
fundamental period resulting in a shoulder shaped unsymmetrical fault current
waveform.
Figure 5.1: Structure of the Morphological HIF detector
Open-close
ASF
Close-open
ASF ∑○
●
○
∑●
●
○+-
MFD
Output
Close
Open
MMF+-
Sampled Fault
Signal Input
f (i,v)
Initial Fault Detection
Av
MMF
fΔf
A1 A2
B1 B2
B1 B2

Chapter 5: HIF Detection and Classification in Distribution Feeders 131
5.2.1 Partitions of MFD Output Signal for High Impedance Fault Detection and
Classification
The HIF detection and classification technique developed in this research
generates spikes, which are also referred to as MFD outputs or MFD values that are
relative to the slope of the transients that generate those spikes. The MFD output is
fundamental to HIF detection and feature extraction. The MFD output is defined in
terms of fault detection windows, and these serve the purpose of capturing transient
information generated by the disturbances. During faults, transients occur, and the
MFD algorithm generates spikes in response to the transient that grow inside the
fault windows within the time duration defined by twin. These spikes are used for
classifying the fault based on the nature and duration of the spikes as they span the
fault windows. For HIF detection, the MFD fault windows are partition into zones as
shown in Figure.5.2 to extract information based on the appearance of the spikes that
correlate to the targeted HIF characteristics.
The HIF detection and classification technique targets two HIF features as
stated. The regions defined as MFDTall Edge Spikes, MFDShort Edge Spikes and
MFDWindow Spikes target the randomness characteristic. Random height variation in
the edge spikes and random growth in window spikes spanning the duration of the
HIF indicate the random behaviour of HIFs.
The HIF AC arc extinction and re-ignition normally happens around the zero-
crossing of the fundamental frequency, thus the region indicated as MFDArc Spikes
targets the growth and variation in MFD spikes that correlates to the HIF arc
extinction and re-ignition characteristic.
Figure 5.2: MFD fault windows partitions for HIF detection

132 Chapter 5: HIF Detection and Classification in Distribution Feeders
The HIF detection and classification technique targets two HIF features as
stated. The regions defined as MFDTall Edge Spikes, MFDShort Edge Spikes and
MFDWindow Spikes target the randomness characteristic. Random height variation in
the edge spikes and random growth in window spikes spanning the duration of the
HIF indicate the random behaviour of HIFs.
The HIF AC arc extinction and re-ignition normally happens around the zero-
crossing of the fundamental frequency, thus the region indicated as MFDArc Spikes
targets the growth and variation in MFD spikes that correlates to the HIF arc
extinction and re-ignition characteristic.
5.3 APPLICATION OF THE MFD OUTPUT IN DETECTION AND
CLASSIFICATION OF HIF
The DOCAS algorithm continuously monitors the network condition by testing
the current signal against a threshold metric. The threshold metric has minimum and
maximum, IThresholdmin and IThresholdmax respectively. If the increase in current
magnitude, denoted Iinc is such that, Iinc > IThresholdmin, a disturbance detection (DD)
flag is activated to alert the algorithm of an abnormal condition. Iinc is further tested
against the IThreshold such that, if Iinc > IThresholdmax, then level 1, (L1) flag is activated to
indicated overcurrent (OC) fault, and OC protection system is activated to act on this
fault. On the other hand, if Iinc < IThresholdmax, the level 2, (L2) flag is activated to
initiate the HIF detection and classification procedure. The sequence of operation
and description of each classification processes in the algorithm in HIF detection is
describe by the flowchart in Figure 5.3
5.3.1 Threshold Classifier
The Threshold Classifier is used to 1) detect any disturbances and 2)
discriminate between fault and normal operating conditions. A range of threshold
values for HIF detection was defined in subsection 4.6.1 of chapter 4 as 0.575 <
MThreshold < 1.15.
Referring to the flowchart, if Iinc ≤ 0.575, no disturbance exists, and the
MFDTall value in the memory is updated and the algorithm continues monitoring the
network. It must be noted that the memory update occurs every Tupdate = 9.6875 ms.
If the increase in current magnitude corresponds to Iinc > 0.575 the activate DD flag
to put the algorithm on alert that a disturbance has occurred. Then Iinc is checked
against IThresholdmax, and if Iinc > 1.15, the L1 flag is activated to initiate OC protection.

Chapter 5: HIF Detection and Classification in Distribution Feeders 133
If Iinc < 1.15, then initiate the Tdmax timer and keep checking until Tdmax is timed out.
While on alert, the prefault MFDiTall value in memory is held, and subsequent
MFDTall values are tested against this value. The memory is only updated after the
alert is cancelled by means of resetting the disturbance detection (DD) flag.
It must be mentioned that the periodical updating of the MFD value in the
memory makes the Threshold parameter adaptive to changing network as well as
load conditions. Hence, the threshold parameter defined through this process can be
used in any system.
5.3.2 Timer Classifier
The Timer Classifier is defined by two time constrains denoted, Tini and Tr,
where Tini is the minimum time constrain to initiate HIF feature extraction and
classification using the MFDv signal output from the fault voltage signal input while
Tr is the reset time, also the maximum time constrain of the algorithm and occurs at
1.0s after Tini. The Timer Classifier is activated if 0.575 < IThreshold <1.15, and the
time delay from the point of fault inception to Tdmax (= 15.3125ms) defined as the
waiting time and denoted Tw must lapse before HIF classification using the MFDv
output can be initiated. The waiting time delay, Tw is used to time out any MFD
spikes generated by switching transients from common power system equipment and
loads as these spikes could be confused for spikes relating to HIF, thus, a timer is set
to allow these spikes to naturally extinguish before initiating HIF feature extraction
and classification.
The timing for the Timer Classifier, defined as Tdmax = (3N +1)∆T = 15.3125
ms. Thus, the total time delay in HIF detection from the time of point inception is Tw
+ Tr = 15.3125 ms + 1.0s = 1.0153125s
5.3.3 HIF Classification Using Feature Extraction Using MFD Output Signal
The L2 flag is activated to initiate the HIF feature extraction using the MFD
output from the voltage signal input denoted MFDv after Tdmax timer times out. The
targeted HIF feature characteristics are the randomness and HIF AC arc extinction
and re-ignition resulting in the shoulder-shaped unsymmetrical fault current
waveform. These HIF characteristics cause variation MFD value of the edges as well
as cause spikes to grow in specific regions of the MFD output signal.
Randomness: The randomness feature is extracted from the edge spikes;
MFDTall and MFDShort spikes as well as the random spikes in the fault windows

134 Chapter 5: HIF Detection and Classification in Distribution Feeders
denoted MFDWindow respectively shown in Figure 5.2. The edge spikes randomly vary
in height due to transients closer to the zero-crossing of the fundamental cycle and
+ve and -ve peak respectively while the window spikes randomly appear within the
fault windows defined by the time delay Twin shown in Figure 3.9. The edge spikes
can be separated from the other spikes to observe the variation. The edge spikes are
defined by (5.1) and (5.2),
( )
20,..,
2 1vTall
kN TMFD k
k N T
= =
+
(5.1)
( )1,..,
1vShort
kN TMFD k
k N T
= =
+
(5.2)
The appearance of the elongated edges spikes is non-uniform and random, and
can occur at any point from k = 0 to ∞ and k = 1,..∞, while HIF persists.
The third class of MFD spikes considered in HIF randomness characteristic are
the MFDvWindow spikes. The MFDvWindow spikes are generated by those transients
occurring away from the zero-crossing and the positive and negative peak. The
MFDvWindow spikes appear randomly inside the fault windows, and unlike MFD spikes
due to transients from device switching and/or short-circuit faults, the MFDvWindow
spikes from HIF will prolong and span the entire length (in time) of the MFD output
so long as the HIF persists. The HIF feature extraction/classifier for the HIF
randomness feature shown in the flowchart targets the regions defined in Figure 5.2
to extract the randomness feature by observing the MFDvTall, MFDvShort and
MFDvWindow spikes.
HIF Arc Extinction and Re-ignition: The arc-extinction and re-ignition
feature of the AC arc due to HIF is extracted by observing the MFD output around
the region defined by Arc Spikes in Figure 5.2. The HIF feature extraction/classifier
for the HIF arc extinction and re-ignition feature shown in the flowchart targets this
region to extract the arc extinction and re-ignition feature by observing the MFDvArc
spikes. The MFDvArc spikes are naturally generated by the intersection of the current
and voltage waveform once every half cycle. If the voltage and current signal
waveforms are in phase, then this happens at zero magnitude of each signal. If they
are not in phase, then at the point of intersection, the instantaneous voltage and
current values are equal. In a 50 Hz system, this repeats every 0.01s. A spike is
generated in the MFDv output at the point of intersection that correlates to this

Chapter 5: HIF Detection and Classification in Distribution Feeders 135
phenomenon. Let’s denote the point of intersection as Tθ, then the MFDvArc spikes
can be defined by (5.3);
2 0,...,v ArcMFD T kN T k= + = (5.3)
The AC arc extinguishes and re-ignites twice every have cycle. The arc
remains extinguished for a short period of time while waiting for the voltage to
regain until it reaches the restriking level to overcome the gap separation break down
voltage for arcing to happen again. This phenomenon impacts the fault voltage at
specific and fixed period defined in (5.3). The arc extinction and re-ignition thus
causes MFDvArc to grow in height when HIF occurs. The MFDvArc spikes can be
separated to observe for the arc extinction and re-ignition HIF characteristics.
5.3.4 Decision Logic
Decision logic is used to test the existence of the target HIF features. The
flowchart shows the conceptualized HIF feature classifiers for the detection of HIF.
The classifiers operate simultaneously to extract the randomness and arc extinction
and re-ignition features of the HIF from the target MFDv spikes. The HIF features
must be detected within the upper time limit constraint defined as Tr in the Timer
Classifier. A decision logic is used to test if the randomness and arc extinction and
re-ignition HIF features exist. HIF can only be declared if both features exist. The
proposed Decision Logic is based on Boolean logic and a set of if then rules. The
following rules constitute the decision logic:
Rule 1: if randomness; {MFDvTall AND MFDvShort AND MFDvWindow} AND arc
extinction/re-ignition{MFDvArc} are present, then initiate HIF alarm.
Rule 2: elseif randomness; {MFDvTall AND MFDvWindow} AND arc extinction/re-
ignition{MFDvArc} are present, then initiate HIF alarm.
Rule 3: elseif randomness; {MFDvShort AND MFDvWindow} AND arc extinction/re-
ignition{MFDvArc} are present, then initiate HIF alarm.
Rule 4: elseif no HIF alarm, then reset, Tr, DD flag and L2 flag.
HIF is only declared if both features are present. The condition for HIF must be
detected and declared within the time limits, thus it takes 1.0153125s from the point
of fault inception to reach a decision if HIF exists or not

136 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.3: Flowchart of Proposed HIF Detection and Declaration
5.4 SIMULATIONS AND DISCUSSIONS
The IEEE Power Systems Relaying Committee recommends HIF studies to be
conducted at voltage levels at 15kV or below. Test and performance verification of
the proposed algorithm were conducted through simulation studies using the IEEE 13
bus test system. The IEEE 13 bus system shown in Figure 5.4 is a heavily loaded
unbalance system operating at 4.14kV. Different software applications for power
system modelling and simulations with varied assumptions for load and line models,
and iterative computational algorithms are available nowadays [180]. Thus, it was
necessary to develop test systems for benchmarking, and making comparative
analysis of the results of the different software. IEEE recommended several
categories of test systems for power system modelling, and one category of such
systems is the unbalanced distribution system consisting of the IEEE 13.

Chapter 5: HIF Detection and Classification in Distribution Feeders 137
5.4.1 Characteristics of the Simulation Test System
The details of the transformer, the complete bus data including load buses, the
load types and line parameters have been obtained from the IEEE power and energy
society (PES) website http://sites.ieee.org/pes-testfeeders/resources.
Several cases of common power system loads including capacitor and
induction motor switching, and cases of HIFs were simulated at different points on
the test system. The line classifications 602, 603 and 605 refer to the configuration of
the line segments between nodes as given Figure 5.4 with details given in the IEEE
13 bus data available on the website and will be referred to as lines in the
simulations. The voltage and current measurements have been taken at the substation
via the secondary windings of the VT and the CT respectively. The efficiency of the
CT and VT have not been modelled and included in the simulations. However, it is
assumed that the VT and CT have similar saturation characteristics and operate
within their linear region as the fault current is very small, and both having turns
ratios of 1:500. This property is accounted for in the algorithm by diving each
quantity by a factor of 500.
Figure 5.4: IEEE 13 bus test system
5.4.2 High Impedance Fault Model
The HIF model used in the simulation is shown in Figure 5.5. A line voltage of
4.16kV on the LV side represented by Vph is connected between the faulted phase and
ground. The DC voltage sources, Vp and Vn connected in series with respective diodes model
the arc voltage and have unequal magnitudes. The resistance Rp and Rn represent the arc
resistance and vary randomly to model the arcing phenomena of HIF giving an erratic
unsymmetrical positive and negative half cycle of the fault current.

138 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.5: Emanuel Arc model in HIF simulation
Contact Surfaces: In the HIF model used, the parameters Vp and Vn model the
contact surfaces. It was experimentally shown by Emanuel et al [56] that, during
HIF, the HIF current is asymmetrical with the positive half cycle having higher value
than the negative half cycle[181]. Hence, to model this phenomenon, Vn must be
greater than Vp (Vn > Vp), and Vn – Vp = ΔV, where ΔV is unsymmetrical voltage.
Moreover, it was shown that, less densely packed contact surface (soil) yield higher
arc voltage than contact surface with high density. Using this as the guide, contact
surfaces in[182] were modelled to obtain the specified current magnitudes.
Furthermore, the values for Rp and Rn are specified in Table 5.1. These parameters
randomly vary between +10% of the specified steady state values and represent the
effective fault resistance for positive and negative half cycles respectively.
Moreover, the rate of variation of the resistance used for the respective surfaces are
40ΔT, 35ΔT, 30ΔT, 20ΔT, 15ΔT and 10ΔT going from contact surface 1 to 6. The
unequal positive and negative arc voltages and the randomly changing arc resistances
generate nonlinear V-I characteristics in each of the contact surfaces. This
phenomenon is graphically illustrated in Figure 5.6 where the V-I characteristic
curves for each contact surface are shown.
Table 5.1: Contact surfaces in HIF simulations
Contact
Surface Vp (V) Vn (A) ΔV (V) Rp = Rn IHIF (A)
1.Wet sand 750 900 150 138 ±10% 15
2.Dry sod 1000 1175 175 98 ±10% 20
3.Dry grass 1200 1400 200 70 ±10% 25
4.Wet sod 1300 1550 250 43 ±10% 40
5.Wet grass 1400 1750 350 33 ±10% 50
6.Concrete 1500 2000 500 23 ±10% 75

Chapter 5: HIF Detection and Classification in Distribution Feeders 139
Figure 5.6: V-I characteristic curves of the simulated contact surfaces
5.4.3 Results of Simulation Case Studies
Simulation cases were performed to demonstrate the different classification
processes illustrated in the flowchart in Figure 5.3 for HIF detection.
Threshold Classification: Several power system conditions, including 100kVar
capacitor switching, 100 kW induction motor switching, 50 kW step load increase
and a case of single line-to-ground (SLG) fault were simulated at various points on
the test system of Figure 5.4 at different inception time, Ts. The results of increase in
fault current magnitude and the existence of the window spikes for each condition
are tabulated in Table 5.2. The increase in fault current magnitude was computed
using the process described in section 5.3.1 using the MFDiTall edge spikes from the
current signal input.
The prefault MFDiTall values used in computing the increases for each phase
are; 0.1111, 0.071 and 0.0901respectively for phases A, B and C. Note that, in three-
phase switching cases, the values in Table 5.2 are phase A results.
The results of the increase in fault current magnitude show that, SLG sustained
the highest increase of Iinc >1.15. This is an overcurrent fault, and hence, HIF
detection mechanism will not be triggered. The alert will be removed when the fault
is cleared by the OC protection mechanism. All other conditions resulted in Iinc
<1.15 which shows that there are not OC conditions. However, the following
conditions including, capacitor switching at node 611 on phase A, node 646 on phase
B, node 652 on phase C, all cases of induction motor switching and three-phase step
load increase at node 675 resulted in Iinc > 0.575 which would activate the DD flag.
The waiting time in the Threshold Classifier defined by Tdmax must time out before
HIF classification can be initiated. The time duration denoted Tdw is the time delay of
the existence of the MDFvWindow spikes for each condition as shown in Table 5.2. It

140 Chapter 5: HIF Detection and Classification in Distribution Feeders
can be noted from these results that the time duration for the MFDvWindow spikes for
each case does not surpass Tdmax = 15.3125 ms which means all MFDvWindow spikes
will be extinguished by the time HIF classification using the MFDv is initiated.
Moreover, the non-existence of the MFDvWindow spikes will not satisfy any rule for the
detection of HIF based on the Decision Logic Rules in Subsection 5.3.4. Therefore,
the disturbances detected are not HIFs.
Table 5.2: Time duration for existence of the MFD spikes due to non HIF transients
Event Node Phase Ts (s) MFDiTall Edge MFDvWindow
Value IInc (pu) Tdw (ms)
SLG 632 A 0.030 0.4066 1.8299
- 0.4279 1.9257
100kVar
cap
switching
611 A 0.030 0.1364 0.6058
4.6875 0.1111 0.5000
646 B 0.035 0.0821 0.5782
9.6875 0.0721 0.5077
652 C 0.037 0.1110 0.6160
12.031 0.0901 0.5000
675 ABC 0.033 0.1212 0.5455
7.0312 0.1111 0.5000
100 kW
IM
switching
632 ABC 0.035 0.1936 0.8713
9.6875 0.1942 0.8740
675 ABC 0.037 0.1942 0.8740
7.0313 0.1950 0.8776
50 kW step
Load Inc.
645 AB 0.037 0.1184 0.5329
2.4375 0.1179 0.5306
675 ABC 0.030 0.1328 0.5977
2.4375 0.1313 0.5910
In Figures 5.7 – 5.10, graphical illustrations of the existence of the MFDvWindow
spikes for a case of SLG fault, capacitor switching, induction motor switching, and
step load increase are respectively shown. It can be observed that, in each of these
cases, the MFDvWindow spikes do not surpass Tdmax time limit. The longest time
duration of 12.031s is for the MFDvWindow spikes for capacitor switching which exists
for about two fault windows translating to half a cycle. Thus, the Time Classifier
ensures that, any non HIF related MFDvWindow spikes are naturally extinguished
within the time delay Tw = Tdmax

Chapter 5: HIF Detection and Classification in Distribution Feeders 141
Figure 5.7: MFDvWindow spikes for SLG fault
Figure 5.8: MFDvWindow spikes for capacitor switching
Figure 5.9: MFDvWindow spikes for induction motor switching
Figure 5.10: MFDvWindow spikes for step load increase
HIF Randomness and Arc extinction and re-ignition Features
Classification: Several cases of HIFs on different contact surfaces defined in Table
5.1 were simulated at various locations (Lines) on the test system at different fault
inception time (Ts) to test the Randomness and the Arc extinction and re-ignition HIF
features extraction/classifications. In all cases, the Threshold Classification to initiate

142 Chapter 5: HIF Detection and Classification in Distribution Feeders
HIF feature extraction/classification was satisfied by the MFDiTall spikes shown in
Table 5.3 where the first MFDiTall spikes in each case indicates the occurrence of HIF
at the point of impact. Further results from these simulations are also tabulated in
Table 5.3 which shows the time of appearance of MFDvTall, MFDvShort and MFDvArc
spikes of the faulted phases that went above the prefault value of each category of the
MFDv spikes. The prefault MFDvTall, MFDvShort, and MFDvArc values for phases (Ph)
A, B and C are respectively listed below. In the case of the MFDvTall and MFDvShort
edge spikes, the values represent the higher of the two tall edge and two short edge
spikes defined in (5.2) and (5.3) respectively.
MFDvTall : 0.4951, 0.5327, 0.4027
MFDvShort: 0.1512, 0.0633, 0.3035
MFDvArc: 0.01090, 0.01030, 0.0109
It must be noted that, Table 5.3 only contains the time of appearance of the first
seven MFDv spikes that went above the lower threshold value within the upper time
constrain (Tr). It must be stated that, there is no Counter Classification to determine
the minimum number of MFDv spikes to determine if HIF exists. The first seven
MFDv spikes are recorded to show the random time sequence of appearance of the
spikes. Moreover, any assumptions of HIF detection for each test scenario are based
on the recorded data in Table 5.3.
It was noted during simulation that in all cases, the random MFDvWindow spikes
appeared and sustained for the duration of the HIF. As defined, the random
appearance of the MFDvTall, MFDvShort and sustained appearance of MFDvWindow
spikes indicate the HIF randomness characteristic. The randomness is signified by
the non-uniform time of appearance of the MFDvTall and MFDvShort spikes. The non-
uniform time sequence can be easily observed in the time data recorded in Table 5.3
for all cases. The HIF arc extinction and re-ignition characteristic is signified by the
MFDvArc, and it can be observed that in all cases, the arc extinction and re-ignition
characteristic is consistently present, and exists when arcing occurs.
The results in Table 5.3 must be tested case by case against the Decision Logic
to determine if the HIF condition has been detected. Referring to the Decision Logic
in Subsection 5.3.4, all cases except HIF phase C of line 605 contacting with dry
grass surface has not been detected based on the first seven random MFDv spikes.
While dispersed sustained MFDvWindow spikes were observed in this case, however,

Chapter 5: HIF Detection and Classification in Distribution Feeders 143
these by themselves with MFDvArc do not satisfy any of the requirements for
declaring HIF. The following can be observed from the result in Table 5.3. Contact
surfaces resulting in higher HIF current generally resulted in more transients with the
inception of HIF hence generating more random MFDv spikes while those contacting
surfaces allowing lower HIF current generated less to almost not random MFDvTall
spikes. This is visible in the results for wet sand where no MFDvTall spikes are shown.
Moreover, HIF cases closer to the point of v and i measurement (feeder substation)
gave better random MFD output as opposed to those faults simulated at locations
away from the feeder substation.
The HIF case at line 605 is such a case where the point of fault is further away
from the substation resulting in the HIF condition not being detected. Furthermore,
the dry grass contact surface is overdamped, resulting in almost no transients to
generate the necessary MFD spikes for HIF detection and classification.
In order to make these observations, and record the data, MFDvTall, MFDvShort
and MFDvArc spikes defined in (5.1), (5.2) and (5.3) respectively were extracted.
Moreover, by separating these spikes, the random MFDvWindow spikes are extracted as
well. The target regions on the MFDv output for the extraction of HIF randomness
and arc extinction and re-ignition characteristics are specified in Figure 5.2.
Extraction of Features for HIF Randomness Characteristic: The random
variations in heights of the MFDvTall, and MFDvShort spikes and the random
appearance of the MFDvWindow spikes are observed in the regions defined as, Tall
Edge Spikes, Short Edge Spikes and Win Spikes in Figure 5.2 respectively for the
randomness characteristic. Equation (5.1) shows the sequence of appearance of the
two consecutive MFDTall spike. These spikes are separated by ∆T and repeat at an
interval of 2N∆T. In equation (5.2), the sequence of appearance of the two
consecutive MFDShort edge spike is shown where these spikes are separated by ∆T
and repeat at an interval of 2N∆T as well. The MFDvTall edge spikes and MFDvShort
edge spikes are separated by time delay of Twin = 4.6875ms.
The process in extracting the randomness and HIF arc extinction and re-
ignition features is graphically illustrated through Figures 5.11-5.14 and 5.15
respectively for HIF on concrete surface at line 602 on the IEEE 13 bus feeder. In
Figure 5.11 (a) the HIF current signal and the faulted phase voltage with MFDv
output shown in Figure 5.11(b). Figures 5.12 (a), (b), (c) and (d) show respectively

144 Chapter 5: HIF Detection and Classification in Distribution Feeders
the MFDvTall (1) spikes, the pu increase in MFDvTall(1) spikes, MFDvTall(2) spikes and
the pu increase in MFDvTall(2) spikes. In can be observed in Figure 5.12(b) that none
of the MFDvTall(1) spikes rose above the MFDvTall threshold limit, hence the flat line
at zero on Figure 5.12(b). However in Figure 5.12(d) it can be seen that several
MFDvTall(2) spikes went above the MFDvTall threshold which indicate the presence of
the HIF randomness characteristic.
The randomness characteristic is also extracted from the MFDvShort spikes and
the MFDvWindow spikes. Figures 5.13 (a), (b), (c) and (d) show respectively the
MFDvShort(1), pu increase in MFDvShort(1), MFDvShort(2), and the pu increase in
MFDvShort(2), edge spikes. It can be observed that the MFDvShort spikes show
characteristics of HIF randomness with random appearance of spikes with random
height above the MFDvShort threshold limit as shown in Figures 5.13(b) and (d)
respectively for the MFDvShort(1) and MFDvShort(2) spikes. Further randomness
characteristic is also extracted from Figure 5.14 which shows the sustained random
appearance of the MFDvWindow spikes after the onslaught of HIF at Ts = 0.37s.
The targeted MFDv spikes must be scanned over entire time duration defined
by Tr and applying threshold classification to determine if HIF randomness feature is
present or not.

Chapter 5: HIF Detection and Classification in Distribution Feeders 145
Ta
ble
5.3
:HIF
Det
ecti
on
an
d T
ime
of
Appea
rance
of
MF
Dv sp
ikes
for
HIF
Fea
ture
Ext
ract
ion
Co
nt.
surf
ace
Lin
e
Seg
./C
on
fig.
Ph
Ts
(s)
MF
DiT
all
Spik
es
MF
DiT
all
Inc.
(pu)
MF
Dv
Spik
es
Tim
e o
f A
pp
eara
nce
of
Ran
do
m M
FD
v S
pik
es
1
2
3
4
5
6
7
Wet
san
d
(1)
63
2-6
33
(60
2)
A
0.3
7
1
0.1
2781
0.5
752
MF
DT
all
- -
- -
- -
-
2
0.1
1190
0.5
036
MF
DS
ho
rt
0.7
147
0.7
64
7
0.9
64
7
- -
- -
M
FD
Arc
0.3
984
0.4
18
4
0.4
38
4
0.4
58
4
0.5
38
4
0.6
98
4
-
Dry
sod
(2)
63
2-6
45
(60
3)
B
0.3
5
1
0.0
8165
0.5
750
MF
DT
all
0.3
947
0.4
24
7
0.4
94
7
- -
- -
2
0.0
7504
0.5
285
MF
DS
ho
rt
0.3
797
0.4
09
7
0.4
39
7
0.4
79
7
- -
-
M
FD
Arc
0.3
663
0.3
86
3
0.4
06
3
0.4
26
3
0.4
46
3
0.4
86
3
0.5
06
3
Dry
gra
ss
(3)
68
4-6
11
(60
5)
C
0.3
5
1
0.1
0369
0.5
754
MF
DT
all
- -
- -
- -
-
2
0.0
9098
0.5
049
MF
DS
ho
rt
- -
- -
- -
-
M
FD
Arc
0.3
784
0.3
98
4
0.4
18
4
0.4
38
4
0.4
68
4
0.4
98
4
0.5
18
4
Wet
sod
(4)
63
2-6
33
(60
2)
A
0.3
7
1
0.1
2770
0.5
751
MF
DT
all
- -
- -
- -
-
2
0.1
1110
0.5
000
MF
DS
ho
rt
0.4
447
0.4
64
7
0.7
47
7
0.8
64
7
0.9
44
7
- -
M
FD
Arc
0.3
984
0.4
18
4
0.4
38
4
0.4
48
4
0.4
68
4
0.4
78
4
0.4
88
4
Wet
gra
ss
(5)
68
4-6
11
(60
5)
C
0.3
0
1
0.1
0364
0.5
752
MF
DT
all
- -
- -
- -
-
2
0.0
9103
0.5
052
MF
DS
ho
rt
0.3
250
0.3
45
0
0.3
75
0
0.4
05
0
0.4
25
0
- -
M
FD
Arc
0.3
784
0.3
98
4
0.4
08
4
0.4
18
4
0.4
48
4
0.4
58
4
0.4
78
4
Co
nc.
(6)
632-6
33
(60
2)
A
0.3
7
1
0.1
2780
0.5
751
MF
DT
all
0.4
197
0.4
39
7
0.6
19
7
0.6
79
7
0.6
99
7
0.7
39
7
0.7
79
7
2
0.1
1150
0.5
018
MF
DS
ho
rt
0.3
750
0.3
85
0
0.3
95
0
0.4
15
0
0.4
25
0
0.4
35
0
0.4
45
0
M
FD
Arc
0.3
884
0.4
08
4
0.4
18
4
0.4
28
4
0.4
48
4
0.4
68
4
0.4
88
4

146 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.11: Signals for HIF at 602 on conc. surface (a) fault voltage and HIF current, and
(b)MFDv output
Figure 5.12: MFDvTall edge spikes for HIF at 602 on conc. surface (a) MFDvTall (1), (b)
MFDvTall(1) pu increase,(c)MFDvTall(2) and (d) MFDvTall(2) pu increase.

Chapter 5: HIF Detection and Classification in Distribution Feeders 147
Figure 5.13: MFDvShort edge spikes for HIF at 602 on conc. surface (a) MFDvShort (1), (b)
MFDvShort(1) pu increase,(c)MFDvShort(2) and (d) MFDvShort(2) pu increase.
Figure 5.14: Random MFDvWindow spikes for HIF at 602 on conc. surface
Extraction of Features for HIF Arc Extinction and Re-ignition
Characteristic: The random variations in heights of the MFDvArc, spikes are observed
in the regions defined as, Arc Spikes for the arc extinction and re-ignition
characteristic. The sequence of appearance of the MFDvArc spikes is defined in (5.3).
The parameter Tθ represents the point of intersection in the current and voltage
waveforms, and under the network and load conditions in which the simulations were
conducted, the following time delays, is TθA = 0.0084375s, TθB = 0.00625s and
TθC = 0.0084375s representing Tθ from T0 = 0s were recorded for phases A, B and C
respectively.
The arc extinction and re-ignition feature can be visual in Figure 5.15 where
the MFDvArc spikes are shown. These spikes will also randomly increase in height
due to the HIF AC arc extinction and re-ignition about the zero-crossing of the
fundamental cycle. The random increase in height of the MFDvArc signify the
occurrence of arcing, and must be observed for the duration of Tr, then determine by
means of the decision logic if both the disturbance is HIF. In Figure 5.15 (b), the
increase in MFDvArc spikes going above the MFDvArc threshold limit are shown. In all
the simulated cases, it was observed that the MFDvArc spikes were present with pu

148 Chapter 5: HIF Detection and Classification in Distribution Feeders
increases above the threshold as shown in Table 5.3. However, presence of the
MFDvArc spikes alone is not sufficient to declare HIF as defined in the decision logic.
Moreover, it was also observed that, applying threshold classification at the MFDv
output feature extraction stage resulted in so the total suppression of the target MFDv
spikes for HIF feature extraction resulting in HIF not being detected as in the case of
the HIF on phase C of line segment 605 contacting with dry grass contact surface.
Through the simulated cases, it was also observed that, those contact surfaces
allowing low HIF current magnitude had low level of transients. Moreover, the
distance of fault from the point of measurement, as observed from the HIF case at
line 605 on dry grass generated fewer transients which are necessary for generating
the target MFDv spikes for HIF feature extraction
Figure 5.15: MFDvArc spikes for HIF at 602 on conc. surface, (a) MFDvArc spikes and
(b) MFDvArc spikes with pu increase.
5.4.4 Revised HIF Feature Extraction Procedure
The HIF feature extraction/classification employed in extracting the targeted
HIF randomness and arc extinction and re-ignition features relies on threshold
classification to segregate the MFDv (values) spikes that resulted in an increase of
>0.575 from the corresponding prefault MFDv values. It was observed in all the
cases that the HIF features were present, however the application of the threshold
classification suppressed the HIF features, particularly the randomness feature
resulting one of the HIF cases not being detected. Moreover, the prefault threshold
value used in the threshold classification is the higher value of the two edge spikes
defined in (5.1) and (5.2) for each case. The two edge spikes do not have the same
prefault MFDv values, thus applying threshold classification based on the higher
value of the two resulted in the fault MFDv values from the set with lower prefault
MFDv value not going above the threshold as shown in Figure 5.12(b) for the

Chapter 5: HIF Detection and Classification in Distribution Feeders 149
MFDvTall(1) increase. Moreover, the minimum threshold (IThresholdmin = 0.575) has
been determined based on the current signal and has been observed to be high when
subjecting the MFDv spikes to threshold > 0.575 pu for HIF feature extraction.
Furthermore, it is considered that application of threshold classification at HIF
feature extraction stage is not necessary to determine the randomness and the arc
extinction and re-ignition HIF characteristics as the threshold classification based on
MFDi threshold classification was already applied to detect the disturbance and
qualify the disturbance for HIF feature extraction. However, in considering the
robustness of the method, threshold classification has been applied, but the threshold
limits have been redefined.
Through the simulation studies it was observed that increase in the height of
the MFD (MFDi and MFDv) spikes is not linear with respect to the increase in fault
magnitude for the MFD spikes in different regions. The MFDTall edge spikes are
impacted by disturbances occurring at about or towards the zero-crossing of the fault
current and voltage signals which can result in very minimal change in magnitude if
the condition is not a short circuit fault. The MFDShort edge spikes on the other hand
are impacted by the disturbances around the positive and negative peaks which can
result in bigger margin of magnitude deviation as compared to the MFDTall edge
spikes. The MFDArc spikes have much lower prefault value compared to the MFD
edge spikes and occur at the point of intersection of the current and voltage signals.
However, the HIF arc extinction and re-ignition impacts MFDArc spikes causing
relatively large increase in their magnitude compared to the MFD edge spikes. This
phenomenon was observed in all simulated cases as evident in the results of Table
5.3. This has led to redefining the threshold classifier values for the different MFDv
spikes. The threshold limit for HIF classification with the following noise tolerance,
6%, 12% and 15% above the prefault MFDv spikes for MFDvTall edge, MFDvShort
spikes and MFDvArc spikes respectively provided better HIF feature extraction. It
must be noted that threshold limits do not reflect effect of distance to fault, however
have been redefined based on the 15% above nominal threshold to detect any
disturbance as previously used.
Considering the defined noise tolerances limits, the pu threshold (cut-off) limit
for MFDv spikes (values) are; 0.53, 0.56 and 0.575 respectively for the MFDvTall
edge, MFDvShort edge and MFDvArc spikes. These values are used in the revised HIF
feature extraction criterion in the algorithm. Moreover, the new MFDv Threshold

150 Chapter 5: HIF Detection and Classification in Distribution Feeders
values for each category of MFDv spikes have been determined for the system
without noise consideration and provide the base values when considering the
performance of the algorithm and HIF features extraction under noisy condition.
Furthermore, in determining the threshold limit, distance to fault from the point of
measurement of signals for HIF characterisation and the type of contact surfaces are
factors that influence the level of transients and the subsequent MFDv spikes and
must be taken into consideration. Contact surfaces are random and have different V-I
characteristics, thus not considered in this analysis for selecting appropriate threshold
limit for the respective MFDv spikes.
In the revised HIF feature extraction criterion, it is considered that the change
in MFDv values given in (5.4) relate to deviation (increase/decrease) from the
prefault value. The absolute value indicates by how much the MFDv deviated from
its prefault value rather than the direction of swing (increase or decrease).
Pr
Pr
vFault v efault
vInc
v efault
MFD MFDMFD
MFD
−= (5.4)
where MDvInc is the measure by how much the MFDvFault deviates from the
MFDvPrefault, where both respectively are the prefault and fault MFDv values of each
target MFDv spikes used in HIF feature extraction except the random windows
spikes. The signal for HIF extraction is then, MFDvInc = 0.5(1+MFDvInc) – threshold
or if MFDvInc value ≤ Threshold, then MFDvInc value = 0.
The prefault values for the respective MFDv spikes for each phase of the
simulation test system are shown in Table 5.4.
Table 5.4: Prefault MFDv Values
Phase Prefault MFDv values
MFDvTall (1) MFDvTall (2) MFDvShort (1) MFDvShort (2) MFDvArc
A 0.49512 0.48512 0.15125 0.14092 0.010904
B 0.53271 0.52922 0.05334 0.06334 0.010285
C 0.40273 0.40195 0.30349 0.30270 0.01090
The revised method is applied to the undetected HIF case on phase C of line
605, which is the line segment 684-611 and given as HIF case 3 in Table 5.5. The
revised threshold limits are given in the same table, and the result for this case is
graphically illustrated in Figures 5.16 – 5.19. It must be noted that the threshold
limits are lower than the level previously determined without considering the
distance to fault. While no empirical relationship is presented, the levels have been

Chapter 5: HIF Detection and Classification in Distribution Feeders 151
determined based on simulations and trial to obtain the best outcome to detect HIF.
Thus, the results in Table 5.5 establishes that there is correlation between distance to
fault and threshold limit for better chance of HIF detection, such that the threshold
limit decreases with increased distance to fault. Moreover, considering the graphical
illustration (Figures 5.16 – 5.19) of the target MFDv spikes, it is obvious that the case
of HIF on phase C of line 605 contacting with dry grass meets the HIF detection
criteria based on the decision logic for HIF declaration. The MFDvTall(1) edge and
MFDvShort(1) edge spikes show the random appearances of spikes above the redefined
threshold limit. The MFDvArc spikes are consistent and show the random appearance
above the redefined threshold.
The DOCAS MFD algorithm detected all cases of HIF by detecting the random
variations in the respective MFDv spikes. However, application of threshold
classification with inappropriate threshold limit can cause the HIF to remain
undetected.
Table 5.5: Revised MFDv Threshold limits at different fault locations
HIF
Case
Location Threshold (pu)
No. of MFDv spikes above
Threshold limit
Distance MFDvTall MFDvShort MFDv
Arc MFDvTall MFDvShort MFDvArc 1 2 1 2
1
632-633
(602) 0.515 0.520 0.850 6 9 4 6 15
0.426128
2
671-684
(604) 0.509 0.515 0.820 1 8 15 1 12
0.785969
3
684-611
(605) 0.505 0.507 0.760 4 0 15 0 16
0.842786
4
671-680
(601) 0.505 0.507 0.760 8 3 16 5 18
0.946955
Location – is the faulted line segment, Distance – total distance to fault in (miles)
from point of measurement to fault location from IEEE 13 bus data sheet available at
http://sites.ieee.org/pes-testfeeders/resources

152 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.16: MFDvTall edge spikes for HIF at 605 on dry grass (a) MFDvTall (1), (b)
MFDvTall(1) pu increase,(c)MFDvTall(2) and (d) MFDvTall(2) pu increase.
Figure 5.17: MFDvShort edge spikes for HIF at 605 on dry grass (a) MFDvShort (1), (b)
MFDvShort (1) pu increase, (c)MFDvShort(2) and (d) MFDvShort(2) pu increase..
Figure 5.18: Random MFDvWindow spikes for HIF at 605 on dry grass

Chapter 5: HIF Detection and Classification in Distribution Feeders 153
Figure 5.19: MFDvArc spikes for HIF at 605 on dry grass, (a) MFDvArc spikes and
(b) MFDvArc spikes with pu increase.
5.4.5 Noise Consideration
The DOCAS algorithm HIF feature extraction capability under noise condition
has been tested by corrupting the HIF fault current and faulted phase voltage signals
with different signal to noise ratio (SNR). The success of the technique as previously
observed relies on selecting threshold limits. The threshold limits for the different
MFDv spikes signals at the respective SNR are tabulated in Table 5.6. The values
given in the table were determined through simulations and appropriate adjustment
of the threshold to eliminate all prefault tall spikes associated with the noise.
Table 5.6: Threshold Values at Different SNR Values
SNR
(dB)
Threshold
(pu)
Number of MFDv spikes above Threshold Limit
MFDvTall edge MFDvShort edge MFDvArc
MFDvTall MFDvShort MFDvArc 1 2 1 2
-20 0.57 0.75 1.8 1 3 1 2 2
-10 0.54 0.6 1.6 0 4 2 18 5
0 0.52 0.55 1.2 15 10 9 12 5
10 0.52 0.55 0.7 12 10 3 18 20
20 0.52 0.55 0.7 14 12 3 20 20
The DOCAS algorithm MFDv output under noise condition can be graphically
illustrated by considering the case of HIF on phase A of line 602 contacting with
concrete represented by Figures 5.20 – 5.24. The HIF current and phase voltage
signals have been corrupted with white Gaussian noise with SNR of -10dB.
Figure 5.21(a) shows that none of the MFDvTall(1) edge spikes had increase
above the threshold limit. However, Figure 5.21(b) shows the appearance of MFDvTall
edge spikes above the threshold limit.
The presence of the randomness feature can be further observed in the
MFDvShort edge and the MFDvWindow spikes respectively shown in Figures 5.22 and
5.23 with the MFDvWindow spikes having sustained chaotic appearance with increased

154 Chapter 5: HIF Detection and Classification in Distribution Feeders
random magnitudes. Comparing these responses to the case without noise in Figures
5.11 – 5.15, the presence of noise reduced the rate of appearance of the MFDv spikes
with magnitude increases above the threshold limit including the MFDvArc spikes in
Figure 5.24(a) and the corresponding magnitude increase in Figure 5.24(b).
However, sufficient MFDv spikes with magnitude increases above the threshold to
declare a case of HIF exist, thus this case of HIF has been successfully detected in
the presence of noise. Moreover, the results in Table 5.6 indicate that the case of HIF
was successfully detected in all cases of noise simulation. The results in Table 5.6
and the graphical illustration suggests that, in considering the threshold limits under
noise condition, the signal to noise ratio must be measured to determine the
appropriate selection of threshold limit for each MFDv spikes. The results in Table
5.5 relates to noise evaluation perform on the HIF signal for the HIF on phase A on
line 602 contacting with concrete surface. However, the results show that noise
affects the appropriate selection of threshold limit in HIF detection when applying
threshold classification. The threshold limit increases with increased noise level.
Thus, the factors to consider in selecting threshold limit in HIF detection by
means of Threshold classification are distance to fault and the signal to noise ratio.
Such that, the threshold limits for the respective MFDv spikes are a function of the
variables distance (d) and SNR, where MFDv Threshold = f(d, SNR).
For practical implementation, the distance to fault and the SNR must be
determined to automatically select the correct threshold limits.
Figure 5.20: Signals for HIF at 602 on conc. surface (a) fault voltage and HIF current, and
(b) MFDv output with noise.

Chapter 5: HIF Detection and Classification in Distribution Feeders 155
Figure 5.21: MFDvTall edge spikes for HIF at 602 on conc. surface (a) MFDvTall (1), (b)
MFDvTall(1) pu increase,(c)MFDvTall(2) and (d) MFDvTall(2) pu increase with noise.
Figure 5.22: MFDvShort edge spikes for HIF at 602 on conc. surface (a) MFDvShort (1), (b)
MFDvShort(1) pu increase,(c)MFDvShort(2) and (d) MFDvShort(2) pu increase with noise.
Figure 5.23: Random MFDvWindow spikes for HIF at 602 on conc. surface with noise.

156 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.24: MFDvArc spikes for HIF at 602 on conc. surface, (a) MFDvArc spikes and
(b) MFDvArc spikes with pu increase with noise.
5.5 CHALLENGES IN HIF DETECTION IN THE PRESENCE OF
INCREASING RE BASED DER IN RADIAL DISTRIBUTION
NETWORKS
The increased penetration of RE based DERs such as photovoltaic (PV)
systems directly into the Medium to Low voltage radial power distribution networks
introduces new challenges to the already difficult task of developing secure
protection system including HIF detection and identification.
As was previously discussed, HIFs generally induce very small fault current
magnitude in the range of between 10A-50A RMS which causes extreme difficulty
in being detected by the OC protection systems. The increased penetration of RE
based DERs at the feeders reduce the fault current contribution from the substation
(SS) source which can exacerbate the already difficult task of designing an adaptive
protection to detect all types of fault conditions including HIFs.
The following simulation studies are conducted to demonstrate the difficulties in
HIF detection in distribution networks with RE based DERs such as PV systems
using OC protection scheme.
5.5.1 Simulation System
A sample radial distribution feeder with PVs is modelled in
MATLAB/Simulink as shown in Figure 5.25 is used to test the proposed algorithm.
All system components remain as previously described however have been
reconfigured for a system voltage of 4.16kV. The network spans 40 km with PV1
located 10 km from the substation, and the remaining PVs located 10 km apart. The
distributed loads at each PV location are at 75 kW for total feeder load of 300 kW and
are shared by the main source and the local PVs. The PVs are rated at 100 kW each

Chapter 5: HIF Detection and Classification in Distribution Feeders 157
giving a total feeder capacity of 2.4 MW. All PV systems were simulated at STC
(1000 W/m2, 25°C) and the voltage and current signals are taken from the secondary
of the VT and CT respectively.
Two cases of HIFs with very slowly changing Rf (sandy contact surface) were
simulated at fault locations XF1 and XF2 for HIF at locations near and further away
from the point of measurements. Moreover, the fault locations also determine the
number of sources (SS and PV) feeding the fault.
Figure 5.25: Radial feeder with PV
5.5.2 HIF at Location XF1 - Closer to Point of Measurements
The prefault MFDiTall edge values representing the current magnitude without
and with PV penetration are shown in Table 5.7.
The prefault MFDiTall edge values measured at the SS indicates a current
reduction of 18.02% because of PV penetration. The considered case of HIF is
initiated at 0.06s. Considering the case of HIF occurring without PV penetration, the
fault current increased by 10.66%. This is much lower than the normal OC threshold
limit of more than 2 to 3 times the prefault current to detect any fault. With PV
penetration the HIF results in a fault current magnitude increase of 7.43%. The net
effect of PV penetration on fault current magnitude measured at the SS is considered
relative to the prefault current without PV penetration resulting in the decrease in
current magnitude calculated as (1 – 0.0347/0.0394) x 100 = 11.3%. This shows that
increased penetration of PV can aggravate the difficulty in HIF detection using the
OC protection scheme. Moreover, the reduced fault current magnitude reaffirms the
dynamic behavior of the feeder due to penetration of RE based DERs such as PVs.
The plots in Figures 5.26 to 5.27 show the effect of PV penetration on the current
magnitude. Figure 5.26 (a) shows the fault current waveforms without and with PV

158 Chapter 5: HIF Detection and Classification in Distribution Feeders
penetration with respective MFDi outputs shown in Figures 5.26 (a) and (b). The
impact of PV penetration is observed by considering the MFDiTall edge spikes; hence
MFDiTall (1) and MFDiTall (2) edge spikes are shown in Figures 5.27 (a) and (b) to show the
trend. The reductions in the current magnitude due to the increased PV penetration are shown
in both plots. The fault location XF1 is nearer to the substation and located between PV1
and PV2. Therefore, the MFDiTall values associated with these sources increased from
their prefault values as shown in Table 5.7. PV3 and PV4 are located further away
from the fault hence they are blind to the HIF at XF1. Moreover, the fault current
magnitude is so insignificant to have any implication on these PVs.
Figure 5.26: DOCAS MFDi outputs for HIF at XF1 closer to the feeder substation (a) MFDi
without PV, (b) MFDi with PV
Figure 5.27: DOCAS MFDi outputs for HIF at XF2 further from the feeder substation (a)
MFDi without PV, (b) MFDi with PV

Chapter 5: HIF Detection and Classification in Distribution Feeders 159
5.5.3 HIF at Location XF2 - Further from Point of Measurements
The prefault MFDiTall edge values representing the current magnitude without
and with PV penetration are shown in Table 5.8. The effect on the substation current
due to HIF occurring at a distance further away from the substation in a radial
distribution network with PV integration is demonstrated. The decrease in the
prefault MFDiTall for without and with PV in Table 5.8 compared to Table 5.7 is
associated with the increase in the Thevenin equivalent impedance with increased
fault distance.
Figures 5.28 to 5.35 demonstrate the impact on fault current magnitude in
radial feeders with increased RE based DERs for HIF occurring at a distance further
away from the point of signal measurements. Figures 5.28(a) shows the fault current
signal waveforms with and without PV penetration and respective MFDi outputs
shown in Figures 5.28 (b) and (c). The net effect of PV penetration on fault current
magnitude measured at the SS for the fault at XF2 from prefault value without PV to fault
with PV results in a decrease in current magnitude calculated as (1 – 0.0323/0.0370) x 100 =
12.7%.
The fault location XF2 is towards the end of the feeder and between PV3 and
PV4. The results in Table 5.8 show that the MFDiTall values for the two PV systems
increased by 10% in response to the HIF. The increased current injection by PV3 and
PV4 caused feeder current seen at the SS to drop from its prefault value of 0.0353 to
0.0323 resulting in an 8.5% drop fault in current magnitude. This phenomenon can
cause the feeder relay to see this as a load reduction. Figures 5.29 (a) and (b)
graphically illustrate this condition where the MFDiTall (1) and MFDiTall (2) edge
spikes show the decrease in fault current magnitude seen at the feeder substation.
Such a condition will aggravate the deficiency in the feeder OC protection
system rendering it totally blind to the existence of this fault condition.
The results from these simulations reaffirm the deficiency of the OC protection
system in the detection and identification of HIFs thus requiring other methods such
as the DOCAS algorithm.

160 Chapter 5: HIF Detection and Classification in Distribution Feeders
Table 5.7: MFDiTall edge values for HIF at location XF2
MFDi
Parameters
MFDiTall
without PV MFDiTall with PV penetration
SS SS PV1 PV2 PV3 PV4
Prefault 0.0370 0.0353 0.005 0.009 0.010 0.010
Fault 0.0419 0.0323 0.005 0.009 0.011 0.011
Diff 0.0049 -0.0030 0 0 0.0001 0.0001
5.5.4 Application of DOCAS Algorithm in HIF Detection in Radial Distribution
Feeders with Increased Penetration of RE Based DERs
The condition defined in subsection 5.5.3, and for which the MFDiTall output for the
simulated case depicted in Figure 5.27(b) poses a serious challenge in HIF detection
using any conventional OC protection technique. HIF detection under such condition
will have to rely on feature extraction. The effectiveness of the DOCAS algorithm is
tested under this condition. For this purpose, additional HIF simulation has
performed at location XF2 under same load condition with fallen conductor on dry
grass contact surface. The fault current signals for the case of with and without PV
penetration are shown in Figure 5.28(a). The MFDi outputs of the DOCAS algorithm
for these scenarios are respectively shown in Figure 5.28(b). The trend in the
behaviour of the fault current magnitude under these scenarios is graphically
illustrated by extracting the respective MFDiTall (1) and MFDiTall (2) outputs (spikes)
as shown in Figure 5.29 (a) and (b) respectively. The HIF is initiated at 0.4s, and the
trend shows that HIF occurring without PV results in an increase in fault current
magnitude while in the case of HIF with PV penetration, the fault current magnitude
decreases. The effectiveness of the DOCAS algorithm in detecting HIF is tested
against HIF occurring at XF2 with PV penetration.
The procedure in HIF detection using the DOCAS algorithm is implemented
according to the flowchart in Figure 5.3. The first step is detection of disturbance
based on threshold classification using the MFDiTall edge spikes. The increase in
MFDiTall edge spikes is determined according to (5.5). The MFDiTall (1) and MFDiTall
(2) edge spikes with their respective pu increases above the cut-off threshold 0.575
pu are shown in Figure 5.30. The disturbance is dictated by MFDiTall (1) edge spikes
as shown in Figure 5.30(b). The MFDiTall (2) edge spikes show no increase above the
threshold as show by Figure 5.30(d). The increase in the MFDiTall (1) edge spikes fall
within 0.575 < IThreshold <1.0 which satisfies the requirement for further HIF
extraction based on DOCAS MFDv output based on the fault voltage signal input.

Chapter 5: HIF Detection and Classification in Distribution Feeders 161
The fault voltage signal for the HIF with PV penetration at location XF2 is
shown in Figure 5.31 (a) with corresponding MFDv output in Figure 5.31(b).
The randomness and HIF arc extinction and re-ignition features are extracted from
the MFDv output by targeting the MFDvTall edge spikes, the MFDvShort edge spikes,
the random window, MFDvWindow spikes and the MFDvArc spikes shown in Figures
5.32 – 5.35 respectively. The following prefault MFDv values were recorded for the
respective target MFDv spikes, MFDvTall (1) =0.4921; MFDvTall (2) =0.5032;
MFDvShort (1) =0.2482; MFDvShort (2) = 0.2393 and MFDvArc = 0.00954. The
thresholds are set at 5% above prefault value the MFDvTall edges spikes, 8% for the
MFDvShort edges spikes and 10% for the MFDvArc spikes. Figure 5.32 shows that
neither of the MFDvTall edge spikes had increase above the threshold limit. In Figure
5.32(b) the MFDvShort (1) shows the randomness characteristic with spikes having
random height above the respective threshold limit. Moreover, the randomness
characteristic is also shown in the random window, MFDvWindow spikes in Figure
5.34. The window spikes randomly vary in height after HIF at 0.4s and persist.
Furthermore, prolonging spikes appear in the fault windows with random heights. In
Figure 5.35(a), the MFDvArc spikes are shown with those spikes going above
threshold with random height in Figure 5.35(b).
The requirements for HIF detection based on the decision logic have been
satisfied; hence the HIF under this condition has been detected by the DOCAS
algorithm.
Figure 5.28: HIF signals for HIF at XF2 on dry grass (a) fault currents for with and without
PV, (b) MFDi outputs for with and without PV

162 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.29: MFDiTall spikes for HIF at XF2 on dry grass (a) MFDiTall (1) spikes for with and
without PV, (b) MFDiTall (2) spikes for with and without PV
Figure 5.30:MFDiTall spikes and MFDiTall pu increases for HIF on dry grass at XF2 with PV
(a) MFDiTall (1) spikes, (b) MFDiTall (1) pu increase, (c) MFDiTall (2) spikes, (c) MFDiTall (2)
pu increase
Figure 5.31: HIF signals for HIF at XF2 on dry grass (a) fault voltage with PV, (b) MFDv
output

Chapter 5: HIF Detection and Classification in Distribution Feeders 163
Figure 5.32: MFDvTall spikes and MFDvTall pu increases for HIF on dry grass at XF2 with PV
(a) MFDvTall (1) spikes, (b) MFDvTall (1) pu increase, (c) MFDvTall (2) spikes, (c) MFDvTall (2)
pu increase
Figure 5.33: MFDvShort spikes and MFDvShort pu increases for HIF on dry grass at XF2 with
PV (a) MFDvShort (1) spikes, (b) MFDvShort (1) pu increase, (c) MFDvShort (2) spikes, (c)
MFDvShort (2) pu increase
Figure 5.34: Window, MFDvWindow spikes

164 Chapter 5: HIF Detection and Classification in Distribution Feeders
Figure 5.35: HIF arc extinction and re-ignition, MFDvArc spikes
5.6 CONCLUSION
The strategy for HIF detection and classification require feature extraction
from the DOCAS MFD output. The MFD output from current signal input,
designated MFDi and voltage signal input designated MFDv are used in the
classification process. The segregation of the non HIF related features from the HIF
features are achieved through conceptualized classifiers including Threshold
Classifier, Timer Classifier, and MFD output Feature Extraction/Classifiers including
Randomness and HIF Arc Extinction and Re-ignition Classifiers. In threshold
classification, the Threshold Classifier uses the upper and lower level threshold
values to differentiate a possible HIF related disturbance from a non HIF related
disturbance. The Time Classifier is used to time out any non HIF related MFD spikes
generated by the transients from the disturbance. The Threshold Classifier uses the
MFDi tall edge spikes while the Timer Classifier observes the fault window of the
MFDv spikes existence of random window spikes.
Simulation case studies including, a case of SLG fault, 100 kVar capacitor
switching, 100 kW induction motor switching and 50 kW step load increase were
simulated using the IEEE 13 bus test system to validate the Threshold and Timer
Classifiers. It was observed that, through these classification processes, only those
disturbances meeting the characteristics of HIF are processed. The HIFs generally
result in lower fault current, thus Threshold parameter with lower and upper
threshold limits have been defined with noise tolerance of 15% above prefault MFDi
value for both upper and lower thresholds. It was further observed that, the window
spikes from MFDv output are short lived, and die out before the Timer Classifier
limit of 15.3125 ms. The Threshold and the Timer Classifiers operate simultaneously
once a disturbance is detected. If the condition of the Threshold and Timer
Classifiers are met, further HIF classification based on feature extraction is initiated.

Chapter 5: HIF Detection and Classification in Distribution Feeders 165
Several cases of HIFs at locations on IEEE 13 bus test system were simulated
on six different contact surfaces to test and verify the HIF feature
extraction/classification process. For HIF feature extraction, the MFDv is
sectionalised to observe for the target HIF features of randomness and HIF arc
extinction and re-ignition. The extracted HIF features were tested against decision
logic to determine if the condition is HIF. Through the simulation, it was observed
that the proposed method is effective when sufficient transient is generated by the
HIFs.
In all simulated cases, it was observed that the HIF arc extinction and re-
ignition characteristic was present. This feature will be present if arcing exists. The
randomness feature on the other hand depends on the rate of change of the effective
fault resistance. Highly damped (densely compact) surfaces resulted in low current
magnitude with fewer transients due to slow changing effective resistance. The
DOCAS algorithm generates MFD spikes in response to the transients. It was
observed that, in one case of HIF at line 605 contacting with dry grass there were
variations in the edge spikes however; none of the edge MFDv spikes went above the
threshold value to suggest HIF. The line 605 is further than all other test points used
in the simulation, thus is observed that distance to fault with respect to the point of
measurement of the input signal can affect the sensitivity of the algorithm. In this
case it was observed that, the random window spikes were present with arc
extinction and re-ignition spikes; however, it is not one of the rules in the decision
logic to confidently declare any case of HIF. Thus, no HIF was declared in this case.
It was observed that, in all simulated cases, the DOCAS algorithm detected the
existence of the HIF by generating MFDv spikes with randomly changing heights
(values), however segregation through thresholding with inappropriate threshold
limit for HIF feature extraction can result in the suppression of the HIF, thus
undetected as demonstrated by the case of HIF on phase C of line 605 contacting dry
grass. Thus, the threshold classification used in feature extraction using the MFDv
spikes was revised for better performance as demonstrated by considering the
undetected cases. Moreover, it was determined that, distance to fault from the point
of signal extraction is a factor to be considered in selecting the threshold limit in
feature extraction.
The performance of the DOCAS algorithm in feature extraction under noise
condition was evaluated by corrupting the fault voltage and the HIF current signals

166 Chapter 5: HIF Detection and Classification in Distribution Feeders
with white Gaussian noise with different SNR. The algorithm performed successfully
under the simulated noise conditions.
It was generally observed that, while high level of noise has implications on the
performance of algorithm, the HIF features were still present but the interval of
appearance on MFD spikes that wen above the threshold became lengthened. The
implication is that, under noisy condition, the existence of cases of HIF may not be
detected within the reset time (Tr), the HIF detection delay must be extended under
noisy condition. Moreover, distance to fault with respect to the point of signal
measurement and the SNR are factors to consider in the selection of appropriate
threshold limit.
The simulation studies for HIF detection in radial distribution feeders with
increased RE based DERs revealed a potential difficulty that could be encountered,
especially in detecting HIFs occurring away from the point of measurement and
closer to larger DERs are capable of increasing their output to entirely feed the fault.
The increased output from the DERs in response to the HIF further reduces the
current contribution from the grid through the substation. The effectiveness of the
DOCAS algorithm has been tested under this scenario, and its performance has
shown remarkable outcome, which demonstrates that the DOCAS algorithm can
detect the HIF condition even under this condition.
Under all conditions and factors considered in the simulations, all cases of HIF
conditions were detected within the reset time delay of 1.0153125 s.
In considering the practical implementation of the algorithm, it is necessary to
maintain precise timing to extract the target MFDv spikes for the randomness and the
arcing characteristics of HIF. Moreover, the phase angle between the voltage and
current must be monitored to determine their point of intersection for the extraction
of the MFDvArc spikes. Thus, phasor measure units (PMU) at the point of
measurement need to be installed to extract the information.
While the DOCAS algorithm has the ability to respond to OC fault, however it
is anticipated that it could be used in tandem with the existing OC protection in
providing the mechanism for HIF detection which the existing OC protection system
lacks.

Chapter 6: DC Arc-Fault Detection in PV Systems 167
Chapter 6: DC Arc-Fault Detection in PV
Systems
6.1 INTRODUCTION
Advances in power electronics converters have seen increased levels of RE
based DERs especially PV systems in distribution networks. Moreover, the direct
integration of PV system provides opportunity for the existence of DC power system
to supply DC loads directly. Like any power system, fault can occur on any part of
the system, and must be protected to prevent damage as well injury to people.
Protection for DC power system is still in its infancy as compared to AC power
protection. The conventional overcurrent protection strategy using current magnitude
as the threshold metric is applied for all types of faults in the DC power systems
including PV systems. However not all fault conditions on the DC system can be
adequately protected using such strategy. One such fault condition is the DC Arc-
Fault occurring on the DC systems including the PV system. In this chapter, a
technique for DC arc-fault detection in PV systems based on the DOCAS algorithm
is presented. The effectiveness of the algorithm during low irradiance as well as
transition in irradiance from partial shading is tested. The robustness of the algorithm
in differentiating arcing faults from non-arcing conditions is demonstrated by
simulations. The rest of the chapter is organised as follows: In section 6.2, the
proposed DC arc-fault detection technique is presented. In section 6.3 simulations to
verify the proposed scheme are presented with conclusion in section 6.4.
6.2 THE PROPOSED DC ARC-FAULT DETECTION TECHNIQUE
The DC arc fault detection technique presented herein proposes to use current
and voltage signal extracted by placement of appropriate sensors at the PV strings
and DC bus. The measured current and voltage signals are fed as input to the DC arc
fault detector which is centrally located within the vicinity of the inverter. Presence
of arc is detected by continuously monitoring and Analyzing variation in signals
extracted at the input of the inverter and on the PV array DC bus (before the DC-DC
converter). The structure of the DC arc-fault detector is shown in Figure 6.1.

168 Chapter 6: DC Arc-Fault Detection in PV Systems
Figure 6.1: Block diagram of the DC Arc-Fault detection system
6.2.1 DC Arc Fault Detector
The DC arc-fault detector uses the DOCAS MFD algorithm to detect the
chaotic behavior of the sustained DC arc-fault. There are two functional components
to achieve the desired output, the cascaded filters and SE. The architecture of the
DOCAS algorithm is dictated by the structure of the designed SE. The SE is a
filtering signal that dissects the topography of the graph of the fault signal to extract
feature for fault detection and classification. All the SEs, A1, A2, B1 and B2 used in
DC arc fault detection are directly inherited as applied in OC fault protection and
HIF detection and classification. Moreover, the mathematical derivation and design
of the algorithm remains the same as presented Chapter 3.
6.2.2 The DOCAS MFD Signal Output in DC Arc-Fault Detection
The procedure for DC Arc-fault detection is the same as fault detection in the
AC power system. However, in the DC Arc-Fault detection, the concept of fault
detection window is not available because of the non-sinusoidal nature of the (DC)
signal. The onslaught of the arc is detected by appearance of spikes which increase in
height in response to the fast changing (rate of change of the random DC arc) noise
like DC arc characteristic that sustains when ignited. The spikes in the DOCAS MFD
output appear chaotically. The DOCAS MFD algorithm detects DC arc-fault by
means of detecting the chaotic behaviour of the random DC arc.
The fault voltage and current, Vdc and Idc are operated on at the MMF stage to
create the initial fault detection signals, ΔVdc and ΔIdc by subtracting the average
MMF output from the input signals to detect existence of DC arc-fault. The chaotic
behaviour of the DC arc is detected further at the ASF stages for the classification of
DC arc-fault.
Open-close
ASF
Close-open
ASF ∑○
●
○
∑●
●
○+-
MFD
Output
Close
Open
MMF+-
Sampled Fault
Signal Input
Idc
Initial Fault Detection
Av
MMF
ΔIdc
A1 A2
B1 B2
B1 B2
Vdc
VdcIdc
ΔVdc

Chapter 6: DC Arc-Fault Detection in PV Systems 169
6.3 SIMULATIONS AND DISCUSSIONS
To test the effectiveness of the DOCAS MFD algorithm in DC arc-fault
detection, the system configuration of Figure 6.2 was modelled in
MATLAB/Simulink.
6.3.1 Characteristics of the Simulation System
The 154 kW PV system is connected to a 4.16kV radial distribution feeder with
a substation supply capacity of 5 MW suppling distributed loads along the feeder
totalling 4.5 MW. The PV system is connected to the feeder through a 250kVA,
415V/4.16kV, 50Hz, Δ-Y transformer with grounded Y connection providing
galvanic isolation of the PV system from the AC system.
Figure 6.2: Radial distribution feeder with PV penetration used in the simulation study
PV system Configuration: The PV system in the simulation system is
modelled using the SunPower SPR -320E -WHT-D PV nodules available in the
Simulink library. The PV modules have the following specifications; Maximum
Power = 320.542 W, Open circuit voltage (Voc) = 64.8 V, Voltage at maximum
power point (Vmpp) = 54.7, Short-circuit current (Isc) = 6.24 A and Current at
maximum power point (Impp) = 5.86. The PV system is made up of four 19.233kW
parallel PV arrays each having four parallel PV strings made of fifteen series PV
modules. The configuration of the PV array used in the simulation is shown in Figure
6.3. The PV arrays arrangement for the PV system is shown in Figure 6.4.
The I-V and P-V plots for the PV string configuration at STC, (1000 w/m2,
25ºC) are shown in Figure 6.5. Based on this configuration, the PV strings operate at
maximum power point voltage (VMPP) of 820.5 DC and maximum power point
current (IMPP) of 5.86A and provide 4.81 kW per string capacity under STC. A

170 Chapter 6: DC Arc-Fault Detection in PV Systems
300W, 850V DC generic inverter is used produce 415V AC output. MPPT using
Perturb and Observe algorithm is used to regulate Vdc. A Description of the
components is given in section 4.7 of Chapter 4.
The fault conditions simulated occur in the strings in PV array 1 and
considering the nature of the fault and the level of irradiance considered, it is
assumed that only the strings within the faulted array are affected. The location and
types of faults considered in the simulation are indicated in the diagram of Figure
6.6.
Figure 6.3: PV array configuration in the simulation system
Figure 6.4: A typical PV system configuration array configuration

Chapter 6: DC Arc-Fault Detection in PV Systems 171
Figure 6.5: Characteristic curves for the PV String configuration (a) I-V curve, and
(b)P-V curve
Figure 6.6: Layout of the PV modules in the PV strings for fault simulations.
6.3.2 DC Arc-Fault Model
The DC Arc model used in the simulation to generate the DC Arc-fault current
and fault voltage is the model developed by Stokes and Oppenlander [31] given in
(6.1);
( ) 12.1534.020 arcgarc IzV += (6.1)
where Iarc = Vs/(Rs+Rarc). Vs and Rs are source voltage and resistance
respectively. The zg parameter in (6.1) and (6.2) is length of the arc gap given in
millimetres. A fixed gap distance of 20 mm was maintained, and the arc current was
injected with ±10% random variance with mean value prefault load current at
difference irradiance for faults under specified irradiance.

172 Chapter 6: DC Arc-Fault Detection in PV Systems
The following assumptions are made in these simulations and analysis. That, a
galvanic isolation between the grid and the PV system through a delta/Y, transformer
with Y grounded exists, thus zero fault impedance is implied. The fault current is
only from the PV strings within the faulted array, and no fault current and/or voltage
contribution from the inverter. Further assumptions in the simulations and
performance of the DOCAS algorithm in DC arc-fault detection are; the proposed
DC arc-fault detection method using DOCAS algorithm only detects arcing faults,
which implies the DOCAS is blind to any faults that do not initiate arcing. Under this
premise, it is anticipated that the proposed technique is to be operated in tandem with
the existing DC overcurrent (OC) protection scheme. Moreover, it is assumed that
the existing DC OC protection scheme is capable of detecting any type of fault
resulting in sufficient backfed current particularly at high irradiance. It is further
assumed that, any effective and reliable DC arc-fault detection system is capable of
detecting DC arc-fault in both grounded and ungrounded (floating) PV systems.
Moreover, it is assumed that, ungrounded fault in a grounded PV system exhibits
similar characteristics as any fault condition in an ungrounded PV system. Thus,
simulations have been performed on ungrounded system.
The innovations in the proposed DC arc-fault detection technique using the
DOCAS algorithm relies on DOCAS ability to detect insignificant changes in the DC
current and voltage signal under fault conditions. Thus, the simulations have been
conducted for arcing fault conditions under very low level of irradiance. Moreover,
DOCAS’ ability to differentiate between non-fault conditions such fast transition in
irradiance due to cloud movements and response of the MPPT algorithm have been
simulated. Irradiance levels of 50 W/m2 to 150 W/m2 were used in the simulations to
test the functional capability of DOCAS algorithm. Prefault tests at these irradiances
while maintain a constant average temperature of 30°C were conducted to determine
the current magnitude at the PV strings and the DC bus on the PV system for which
the results are tabulated in Table 6.1.
Considering the results in Table 6.1, it is apparent that load currents extracted
at various points of measurements given in Figure 6.6 are much less compared to the
load current at STC at the same points. Any fault, let alone arcing fault under these
conditions will not generate fault current above 2.1 times (11.72 A) above the load
current at STC at each point to blow out any series inserted fuses at the PV strings or
the OCPD.

Chapter 6: DC Arc-Fault Detection in PV Systems 173
Table 6.1: Prefault current measurements for PV strings at different irradiances
Irradiance
W/m2
Prefault Current (A)
PV Array PV Strings
1 2 3 4 50 0.3105 0.3105 0.3105 0.3105 1.2420
75 0.4662 0.4662 0.4662 0.4662 1.8648
100 0.6216 0.6216 0.6216 0.6216 2.4862
150 0.9325 0.9325 0.9325 0.9325 3.730
6.3.3 DC Arc-Fault Conditions at Low Irradiance
Several cases of arc faults were simulated at points indicated on Figure 6.3.
The faults are generally defined as, parallel faults, for Fp1-Fp7 while Fs1-Fs4 are
series faults. The parallel faults can be reclassified as mismatch faults resulting in
voltage mismatch in the PV strings. Faults Fp1-Fp6 are mismatch faults while Fp7
will be considered as parallel fault.
Mismatch Arcing Faults: The mismatch faults Fp1-Fp3 and Fp6 bridge two
points at different voltages on the same PV string. Fp4 and Fp5 are mismatch faults
that bridge two points at different voltages on adjacent PV strings. The severity of
the mismatch faults can be evaluated base on their mismatch percentage. The
mismatch percentage is determined based on the number of PV modules in the string
that are affected by the fault. Consider a mismatch fault on the same string such as
Fp1. This fault has three PV modules affected, thus the mismatch percentage is (3/15)
x 100 = 20%. Now consider a mismatch fault between two adjacent strings such as
Fp4 affecting PV modules on string 2 (PVS2) and string 3 ((PVS2). There are 9
affected PV modules in PVS2 and 3 in PVS3, thus the mismatch percentage is ((6-
3)/15) x 100 = 40%. The mismatch percentages for all mismatch faults are
determined following this procedure. The fault currents obtained for each simulated
fault condition are tabulated in Table 6.2.
During fault, the unfaulted strings view the faulted string as a load, hence feed
current (negative current, Ireverse) to the faulted string, where this current is the
backfed current. The PV string load current under fault is;
backfedefaultFaultLoad III −= Pr_ (6.3)
where Ibackfed is the backfed current from the adjacent unfaulted PV strings. From
(6.4), the backfed current is;

174 Chapter 6: DC Arc-Fault Detection in PV Systems
FaultLoadefaultbackfed III _Pr −= (6.4)
The backfed current calculated according to (6.4) are tabulated in Table 6.3.
The general trend in the results in Table 6.3 show that the backfed currents increase
with increase in irradiance. However, the arcing faults simulated at the low
irradiance levels still resulted in insignificant backfed currents which indicate that,
for the simulated PV system, the backfed current at each faulting PV strings will not
reach 2.1 times load current of the strings at STC. Thus, the arcing fault will persist.
Observing the results in Tables 6.2 and 6.3, it can be noted that some mismatch
faults having equal mismatch percentage do not exhibit same fault characteristics.
Compare for instance Fp2 (or Fp3) with Fp4 having 40% mismatch. This alludes to
the fact that fault location and fault resistance also dictates the level of backfed
current. The faults Fp2 and Fp3 are in parallel to the faulted PV modules, but are in
series with unfaulted modules in the same string. The resistance of each PV module
in the string is given as, RPV = v/i, where v and i of the PV module at any irradiance
and is inversely proportional to the irradiance. The fault is in parallel to mRPV where
m is the number of faulted PV modules. In arcing fault, the arc channel is represented
by Rarc which is parallel to mRPV to give effective fault resistance as (mRPV x Rarc)/
(mRPV + Rarc). Thus, fault location influences the fault resistance, and consequently
the backfed current.
Table 6.2: Load current under simulated fault conditions at different irradiances
Fault
Type
Mismatch
(%)
PV String Load Current (A) under Fault at Simulated Irradiances
(W/m2)
50 75 100 150
Fp1 20 0.2691 0.4247 0.5804 0.8378
Fp2 40 0.2484 -0.1544 -0.1872 -0.3643
Fp3 40 0.2484 -0.1554 -0.1872 -0.3643
Fp4 40 0.2070 0.3089 0.4493 0.6192
Fp5 20 0.2691 0.4247 0.5804 0.8378
Fp6 60 0.1656 -0.5019 -0.7489 -0.4371

Chapter 6: DC Arc-Fault Detection in PV Systems 175
Table 6.3: Calculated backfed current for the simulated fault conditions
Fault
Type
Mismatch
(%)
PV String Backfed Current (A) under Fault at Simulated
Irradiances (W/m2)
50 75 100 150
Fp1 20 0.0414 0.0415 0.0412 0.0947
Fp2 40 0.0621 0.6206 0.8088 1.2968
Fp3 40 0.0621 0.6206 0.8088 1.2968
Fp4 40 0.1035 0.1573 0.1723 0.3133
Fp5 20 0.0414 0.0415 0.0412 0.0947
Fp6 60 0.1449 0.9681 1.3705 1.3697
The proposed arcing fault detection method can be visualized through graphical
illustration of one of the simulated cases, where faults are initiated at 1.5s. Fault Fp1
was simulated on PV string 1 at all levels of irradiance; the graphical illustrations in
Figure 6.7 are related to irradiance of 50 W/m2. Figure 6.7 (a) shows the drop in PV
string 1 load current. Figure 6.7 (b) is the fault current transformed by the MMF
stage of the DOCAS algorithm. Figure 6.7 (c) is the difference fault current signal
for the DC arc-fault detection. In Figure 6.7 (d) is the MFD output showing the
onslaught of arcing fault at 1.5s. The algorithm detects the rate of change in the fault
current signal to generate spikes. The chaotic nature of the arc generates random
spikes that grow in height randomly to correlate to the occurrence and changes in the
arc fault current and voltage signals. Arcing is characterized by random and
persistent spikes where as in normal transients the spikes will be short lived.
Fault voltage signals in Figure 6.8 (b)-(d) illustrate the same phenomena based
on voltage signal input. Graphs in Figures 6.7 (a) 6.8 (a) are generated from signal at
the input of the inverter. It is not possible to locate the faulted string based only on
the output of the signal at the inverter input. Figure 6.9 shows the PV string fault
current signals. As it is obvious, fault, Fp1 occurs at string 1 as shown in Figure
6.9(a) where the load current drops as compared to the other unfaulted PV strings.
Figure 6.10 is the corresponding MFD out of the PV strings fault current signals.
While the MFD output of the faulted string, Figure 6.10(a) shows taller spikes
compared to the unfaulted strings, it alone cannot allude to the faulted string. Both
signals are needed to locate the faulted string.

176 Chapter 6: DC Arc-Fault Detection in PV Systems
Figure 6.7: Current signal measured at DC bus with associated signals for DC arc-fault
FP1
Figure 6.8: Voltage signal measured at DC bus with associated signals for DC arc-fault FP1
Figure 6.9: MFD outputs for PV string currents for fault DC arc-fault FP1
Parallel DC Arc-Faults: A case of parallel DC arc-fault, Fp7 at irradiance of
50 W/m2 was simulated at the input of the inverter. A graphical illustration of the

Chapter 6: DC Arc-Fault Detection in PV Systems 177
fault detection occurring at 1.5s is shown in Figures 6.11 and 6.12 for the load
current and voltage respectively. The DC current input to the inverter is;
FaultPVinvDC III −=_ (6.5)
where IPV is the sum of PV string currents and Ifault is the fault current through
the arc channel. The DC input current to the inverter drops as shown in Figure
6.11(a). Since it is an arcing fault, the presence of arc is detected by the appearance
of random and sustained spikes in the MFD output shown in Figure 6.11 (b). The
presence of the arc is also shown on the MFD output of the voltage signal in Figure
6.12 (b) as well. In Figure 6.12 (a) the initial decrease in voltage due to the fault is
shown. The MPPT quickly restore the voltage and puts the system to operate at a
lower maximum power (MPP).
The PV strings initially seem to increase their output as indicated in Figure
6.13 but due to the fast action of the MPPT, the PV strings maintain the mean load
current before the fault with sustained arc fault current generation. The
corresponding MFD outputs in Figure 6.14 also indicate the presence of the arc.
Figure 6.10:Current signal measured at DC bus and MFD out for DC arc-fault FP7
Figure 6.11: Voltage signal measured at DC bus and MFD out for DC arc-fault FP7

178 Chapter 6: DC Arc-Fault Detection in PV Systems
Figure 6.12: Current signals measured at PV strings for DC arc-fault FP7
Figure 6.13: MFD outputs for PV string currents for DC arc-fault FP7
Series Arcing Faults: Four cases of series arc faults defined as, Fs1 to Fs4 were
simulated at the simulated low irradiance levels at the locations indicated on Figure
6.3. The general trend in the load current during all cases of series fault is graphically
illustrated by considering the case for series fault Fs2 at irradiance of 50 W/m2 shown
in Figure 6.15, and Figure 6.16 for load current and voltage respectively.
Series arcing fault introduces a restrictive arc resistance in series to the load
resulting in significant reduction in faulted PV string load current with almost no
backfed current from the unfaulted strings. This reduction is seen at the DC input of
the inverter. Figure 6.15(a) shows the drop in the load current at the inverter input.
The corresponding MFD output in Figure 6.15 (b) indicates the existence of
sustained DC arc-fault. The MPPT response by putting the PV system to operate at a
lower MPP as shown in Figure 6.16 (a) where the voltage is quickly restored to
500V. Even at the reduced MPP, the DC arc-fault is still sustained as indicated by the
respective current and voltage MFD outputs.

Chapter 6: DC Arc-Fault Detection in PV Systems 179
The series fault, Fs2 affects PV strings 1 and 2, hence the reduction in their
load currents shown in Figures 6.17 (a) and (b). The Persistence DC arc-fault is also
indicated on the respective MFD outputs of the PV string fault currents in Figure
6.18.
Figure 6.14: Current signal measured at DC bus and MFD out for DC arc-fault Fs2
Figure 6.15: Voltage signal measured at DC bus and MFD out for DC arc-fault Fs2
Figure 6.16: Current signals measured at PV strings for DC arc-fault Fs2

180 Chapter 6: DC Arc-Fault Detection in PV Systems
Figure 6.17: MFD outputs for PV string currents for DC arc-fault FP2
6.3.4 DOCAS Response to Changing MPP with Existing DC Arc-Fault
Condition
The MPPT algorithm usually responds to the changing environmental (varying
irradiance and temperature) conditions by optimizing the operating point of the PV
system to a new MPP to match the changing condition. This is acceptable in the
sense of regulating the DC bus voltage to maintain constant value. However, under
lower irradiance, the fast action of the MPPT can be problematic to the fault
detection system[118] .Under low irradiance, PV system already operates at lower
current, then if a fault occurs, the MPPT will respond to the fault by shifting the MPP
again to even lower point, thus reducing the backfed current making it even more
difficult for the fault detection mechanism to detect the existence of the fault. In the
case of the arc-fault, it will sustain even with lower current level.
To demonstrate the DOCAS algorithm’s operation under such conditions, a
case of parallel and series arc-faults were simulated on the DC bus at Fp7 and Fs3 for
different scenarios of simulated irradiance levels, and the fault current and voltage,
Idc, Vdc were respectively taken at the point of measurement. These tests were
performed to demonstrate further behaviour of the DC arc-fault detection with
persistence of arc-fault while the system undergoes transition in irradiance. It is also
intended to demonstrate the robustness of the algorithm to differentiate between fault
and non-fault conditions.
Transition from High to Low Irradiance with Existing DC Arc-Fault: DC
arc-fault exists at irradiance of 150W/m2 then transitions into lower irradiance of
100W/m2. This case demonstrates transition of the irradiance as the day progresses

Chapter 6: DC Arc-Fault Detection in PV Systems 181
towards the evening. The selection of the very low irradiance levels is intended to
demonstrate the effectiveness of the algorithm to detect DC arc-fault even at very
low irradiance when the irradiance changes while arc-fault exists. Figure 6.19 (a)
shows the DC arc-fault current with arc fault at 1.2s.
The transition from 150W/m2 to 100W/m2 occurs at 1.3s. Practically, the
transition is gradual, and will not result in sudden step change, however the intension
is to distinguish between a normal change and change under fault in the DC load
current. Figure.6.19 (b) shows the MFD output from the DOCAS algorithm where
the chaotic nature of the DC arc can be observed starting at 1.2s. The fast-changing
DC arc causes spikes to randomly appear in the MFD output. The action of the
MPPT restore the DC voltage at 820.5V (1pu) is demonstrated in Figure 6.20 (a)
with the corresponding MFD output in Figure 6.20 (b). This action results in the
system operating at a lower maximum power point while the arc fault is sustained.
Figure 6.18: DC arc-fault current and MFD output high to low transition after fault
Figure 6.19: DC arc-fault voltage and MFD output high to low transition after fault
Transition from High to Low Irradiance with DC Arc-Fault onslaught after
Transition: Figures 6.21 and 6.22 illustrate the scenario where the irradiance
transitions from 150W/m2 to 100W/m2 1.1s then arc fault occurs at 100W/m2 at 1.2s.
This scenario is to demonstrate the capability of the DOCAS algorithm to distinguish
between non- fault and fault condition.

182 Chapter 6: DC Arc-Fault Detection in PV Systems
In Figures 6.21(a) and 6.22 (a) the fault current and voltage are respectively
shown. Their corresponding MFD outputs are shown in Figure 6.21(b) and Figure
6.22(b) respectively. In Figure 6.21(b) a single tall spike above the prefault noise
spikes is visible at 1.1s. This spike is correlated to the change in irradiance.
Similarly, in Figure 6.22(b), the elongated spikes at 1.1s are related to the response
of the MPPT algorithm to restore voltage. Visibly, no sustained random MFD spikes
above the prefault noise spikes are present in both situations. Moreover, the prefault
noise level is reduced with reduced irradiance. The prefault noise level could be
illuminated by applying a noise threshold; however, that is not considered in these
simulations. In the same figures, the onslaught of the arc fault at 1.2s follows a rapid
growth in MFD spikes. These spikes are sustained, and the chaotic nature of the DC
arc is clearly visible. Thus, the algorithm generates sustained, taller MFD spikes in
response arc as compared to normal transition of irradiance.
Figure 6.20: DC arc-fault current and MFD output high to low transition before fault
Figure 6.21: DC arc-fault voltage and MFD output high to low transition before fault
Transition from Low to High irradiance with existing Arc Fault: Arc fault
exists at irradiance of 50W/m2 then transitions into higher irradiance of 75W/m2.
This case demonstrates transition of the irradiance as the day progresses from
morning upwards. The arc fault occurs at 1.2s, and the arc persists as the irradiance
transitions from 50W/m2 to 75W/m2 at 1.3s as illustrated in Figure 6.23 (a) and

Chapter 6: DC Arc-Fault Detection in PV Systems 183
Figure 6.24(a) in the DC current and voltage waveforms respectively. Figures
6.23(b) and 6.24(b) show the corresponding MFD outputs for the DC current and
voltage waveforms where the sustained random MFD spikes appear. Figure 6.24 (a)
shows the increase in DC voltage to 1.002 pu due to the increase in irradiance,
however this is regulated by the MPPT algorithm to 1 pu and maintain the MPP at
level above the level associated with 50W/m2.
Figure 6.22: DC arc-fault current and MFD output high to low transition with fault
Figure 6.23: DC arc-fault voltage and MFD output high to low transition with fault
6.4 CONCLUSION
The DC arc-fault detection strategy utilises the DOCAS algorithm. The
application of the DOCAS algorithm as a DC Arc-Fault Detector in this scenario
does not require any structural change to the algorithm in terms of mathematical
formulation of the MM filters and the SE used. The DOCAS algorithm has been
inherited with all designed parameters as applied in AC system fault detection.
However, the input signals to the DOCAS algorithm in its application as DC Arc-
Fault Detector are DC voltages and currents measured at various points on the DC
side of the PV system. Moreover, under this application the DOCAS algorithm
exhibits different characteristics as opposed to its application in AC fault detection.
DOCAS is a time domain algorithm, hence its easy and seamless application for DC
arc-fault detection. The application of DOCA in DC Arc-fault detection makes use of

184 Chapter 6: DC Arc-Fault Detection in PV Systems
the chaotic behaviour of the DC arc phenomena. When DC arc-fault occurs, the arc
is sustained, and the rate of change in displacement of the DC arc current and voltage
generate spikes in the MFD output. The MFD spikes are random will continuously
appear with existence of the sustained DC arc. The DOCAS algorithm is blind to
faults that do not generate arc, thus it is anticipated that it will operate in tandem with
the existing DC OC protection system in PV systems. The novelty in the application
of DOCAS as a DC Arc-Fault Detector is its ability to detect DC arc-faults under all
conditions including, low irradiance, partial shading, night to day transition.
Moreover, DOCAS is immune to the effect of the MPPT algorithm and can
continuously detect arc-fault under any MPP. Different cases of DC arc-fault at very
low irradiances, including 50 W/m2, 75 W/m2, 100 W/m2 and 150 W/m2 were
simulated to test the sensitivity and effectiveness of the DOCAS’ ability to detect DC
arc-fault. Moreover, the ability of DOCAS to differentiate between fault and non-
fault conditions were simulated with transition in MPP existing arcing fault
conditions under low irradiances. It was shown that, DOCAS could detect all fault
conditions as well as differentiate between faults and non-fault conditions.

Chapter 7: Conclusions and Future Directions 185
Chapter 7: Conclusions and Future
Directions
In this chapter, research outcomes from the thesis are summarised. The
significant research contributions are specified, and the benefits and importance of
the proposed methods are summarised. Finally, recommendations for future research
directions are suggested.
7.1 SUMMARY OF CONCLUSIONS
The main objective of this research work is to develop a fault detection and
diagnostic tool which can be applied in AC as well as in DC systems. MM which is a
nonlinear signal processing tool is used to develop the DOCAS algorithm. The MFD
output signal of the DOCAS algorithm is used to propose strategies for adaptive
radial distribution feeder OC protection, strategy for HIF detection and classification
based on feature extraction. The same algorithm is used for DC arc-fault detection in
PV systems.
The DOCAS MFD is a multistage filter algorithm that uses two nonlinear MM
called the MMF and two classes of ASFs filters called the open-close and close-open
ASFs. The performance of the algorithm was enhanced through the application of a
weighted eccentrically decreasing convex SE, g with five points and two unequal
slopes. The SE was decomposed into two smaller SEs, designated A1 and A2 each
with three points to preserve computational efficiency and applied at the decomposed
MMF filtering stages in cascade. Further two SEs designated B1 = A1 and B2 = g,
such that B2 > B1 where applied at the ASF stages.
The attributes of the DOCAS algorithm in AC system fault detection and
diagnosis has been evaluated through simulation and analysis of simple AC signal as
well as a SLG fault. The output of the algorithm provided characteristics and features
such as the fault detection windows and MFD edge spikes for application in adaptive
OC protection and HIF detection. Moreover, the attributes for HIF detection and
classification based on extraction of two HIF features; the randomness and arc
extinction and re-ignition were established. Furthermore, the MFD output provided
mechanism for the concept of memory update at a fixed time interval by the MFD

186 Chapter 7: Conclusions and Future Directions
edge spikes to adjust the OC threshold parameter and make it adaptive to changes in
distribution network topology and load changes. This technique is important and
provides the characteristic desirable for successful detection and identification of all
types of faults in feeders with high levels of RE based DER penetration.
One of the novelties in the DOCAS MFD algorithm is its seamless application
in fault detection and diagnosis in both AC and DC systems. The DC arc-fault on the
DC side of the PV system can be detected without any structural change. While there
is no structural change in the algorithm, its application in fault detection and
diagnosis in AC and DC system in PV systems exhibited different attributes. The
functional attributes of DOCAS algorithm in DC arc-fault detection in DC systems
were established through the simulation of a DC arc-fault. The concept of fault
detection windows and MFD edge spikes did not exist in DC arc-fault detection.
However, the DOCAS algorithm as a DC Arc-Fault Detector captures the chaotic
nature of the arc phenomenon by generating random chaotic spikes at its output
throughout as the DC arc is sustained when ignited.
The functional characteristics of the DOCAS algorithm in responding to the
test AC and DC arc-fault signal provided the mechanism for developing strategies in
adaptive OC protection in radial distribution feeders, features extraction for HIF
detection and DC arc-fault detection.
In developing strategy for adaptive OC protection in radial distribution feeders
with PV penetration, first a theoretical method based on Thevenin equivalent
modelling of the PV systems and feeder line and two distance factors based on PV
system location and distance to fault with respect to the feeder substation has been
developed. The impact of PV penetration on current contribution by the feeder
substation source established through the theoretical method. The observations made
through theoretical analysis are verified through simulations using the DOCAS
algorithm by simulating different faults conditions including, SLG, DLG and 3-phase
faults at various PV penetration levels and fault distances. The increased PV
penetration reduced the fault current contribution by the feeder substation source
which would have implication on the protection system coordination. The response
of the DOCAS is found to be consistent with observations made through theoretical
analysis. Using the simulated results and output of the DOCAS algorithm, a strategy
for setting an OC threshold which is adaptive to the changing network environment
and load condition with periodical update is developed. Moreover, through further

Chapter 7: Conclusions and Future Directions 187
analysis of DOCAS output, it is observed that, while the increase in actual fault
current magnitude is lower with high level of DERs as compared to the fault current
magnitude due to the same fault condition without DERs, the percentage increase in
fault current magnitude from prefault condition to fault condition with DER is quite
significant. Based on this observation, a strategy for adaptive OC protection
incorporating the percentage increase in fault current magnitude and adaptive OC
threshold limit is developed. This strategy is adopted using the ITOC relaying
algorithm with appropriate scaling of pick up parameters at different DER (PV)
levels and fault distance. The adaptiveness and scalability of the strategy was
demonstrated by applying ITOC protection strategy. A minimum time delay of ¾
cycles + 1 sample (defined as Tdmax = 15.3125 ms) is required to declare an OC fault
before the ITOC relaying is initiated to determine the trip time. The proposed method
demonstrates that irrespective of the location of fault under any RE based DER
penetration level, the relay threshold (pickup) value is always maintained at the same
value. Furthermore, it was observed that protection coordination can be achieved at
different PV penetration level by appropriately selecting relay curves at different
TDS values.
A strategy for HIF detection using several classification techniques, including
Threshold and Timer classifications is developed using MFD outputs using fault
current and voltage signals. Specific regions of the MFD output related to the voltage
signal designated MFDv have been identified for the extraction of the HIF
randomness and arc extinction and re-ignition features. The DOCAS algorithm
generated spikes, called the MFDvTall edge, MFDvShort edge, MFDvWindow and MFDvArc
spikes at its output where the first three category of MFDv spikes are used in the
extraction of randomness feature while the fourth category is used in extraction of
arc extinction and re-ignition feature. The extracted MFDv spikes are subjected to
threshold classification to expose the randomness in time and height variation. The
extracted features are tested against the decision logic for the determination of HIF.
This strategy is tested against cases of HIFs on different contact surfaces simulated at
different test locations on the IEEE 13 bus test system. The DOCAS algorithm
successfully detected all simulated cases; however, the application of threshold
classification to segregate the MFDv spikes exceeding the fixed threshold limit above
15% of the prefault MFDv value of each category of spikes resulted in furthest fault
not detected. The HIF classification strategy is tested against cases of noise for

188 Chapter 7: Conclusions and Future Directions
different SNR and it is found that DOCAS extracted the necessary features although
the noise reduced the rate of appearance of the spikes HIF is still detected. From
these observations, it is determined that, distance to fault and the SNR are factors
have to be considered in determining appropriate threshold limit. The undetected
case of HIF was detected by taking into consideration these factors.
The performance of DOCAS MFD algorithm as a DC Arc-fault Detector is
tested against cases of mismatch, parallel and series DC arc-faults on DC side of
simulated PV system. Moreover, tests are performed at very low irradiance of
between 50 W/m2 to 150 W/m2 to test the effectiveness of the method and its
performance under changing MPP and to differentiating a fault condition. The
DOCAS algorithm as DC Arc-Fault Detector showed remarkable performance in
detecting all cases of DC arc-faults as well differentiating faults conditions from non-
fault condition.
It has been demonstrated through simulations that; DOCAS MFD has the
potential for utilization in adaptive distribution feeder OC protection in distribution
feeders with PV penetration as well as HIF detection and classification in AC
systems. The utilization could be considered for backup protection in tandem with
existing protection scheme in systems where PV systems are being integrated.
Moreover, its ability to detect HIF could be used to complement the lack of capacity
in the existing feeder OC protection in detecting HIF faults.
In DC arc-fault detection, the DOCAS MFD algorithm could be implemented
together with the existing PV fault detection system as well as in any DC system to
provide an integrated protection scheme for reliable and secure protection against
faults including DC arc-faults.
7.2 FUTURE DIRECTIONS
The fault detection and diagnostic tool also referred to as the decomposed
open-close alternating sequence (DOCAS) algorithm has been developed using the
mathematical morphology signal processing technique. This algorithm has been
extensively tested for performance verification and characterisation involving three
different fault scenarios, including OC fault detection in radial distribution network
with increased penetration of DERs, high impedance faults detection and DC arc-
faults detection in PV systems

Chapter 7: Conclusions and Future Directions 189
The simulation case studies provided valuable insights to the functional
attributes of the DOCAS algorithm, particularly its attributes for feature extraction
and fault characterisation in the detection and identification of various fault
conditions. While the algorithm has been successfully tested using synthetic data,
more work is required as part of furthering the investigation into the functional
characteristics of the DOCAS algorithm involving hardware simulation and using
data from physical systems. The suggested further/future work for algorithm
verification studies is summarised in Subsection 7.2.1.
The use of mathematical morphology as a signal processing technique to
developing tools for power system fault detection and condition monitoring is
gaining momentum. The lessons learnt during the research in developing the
DOCAS algorithm are provided in Subsection 7.2.2 to assist future research
involving MM signal processing technique.
The DOCAS algorithm has been extensively used in the simulation studies for
developing procedures for adaptive OC protection in AC distribution system. While
the algorithm has been used for DC arc-fault, it has not been used for DC power
system (non-arcing) OC protection. From the outset, the algorithm will require
structural changes for non-arcing fault detection in DC system as the fault detection
windows based on zero-crossing detection that made AC fault detection successful is
not available in DC fault signals. Thus, further research is required in proposing and
developing techniques for adaptive OC protection in both AC and DC power
distribution networks with increased DER penetration. A compilation of different
proposed techniques with their advantages and disadvantages are provided in
Subsections 7.2.3 and 7.2.4 to assist future research in AC and DC power system
protection.
7.2.1 Further Testing and Evaluation of the DOCAS Algorithm
The performance evaluation of the DOCAS algorithm has been analysed using
synthetic data generated from different fault conditions and scenarios. While every
effort has been made to ensure the simulated case studies closely resembled the
physical characteristics of the simulated conditions, further evaluation of the
algorithm would be necessary to fully realise the potential of the DOCAS algorithm
especially in responding to the actual fault condition. It must also be noted that, with
simulated case study, multiple fault conditions under varying environmental and load

190 Chapter 7: Conclusions and Future Directions
conditions were simulated and the algorithm tested. This cannot be achieved through
staged test. Performing staged tests for fault conditions such HIFs will require
specialise equipment, and moreover, the power supply must be disconnected to
perform such test. Furthermore, data obtained from such staged tests are network
specific for the time period the tests were performed [152]. However, as fault data
from real systems become available, the DOCAS algorithm will be further evaluated.
Thus, in considering future direction to this research, further testing of the DOCAS
algorithm involving hardware simulations would be required. For such hardware
simulations, it would also be necessary for hardware implementation of the
algorithm. This will involve implementing a digital relay by programming the
DOCAS MFD algorithm into microchip then further testing involving tools such as
hardware in the loop to test the digital relay by simulating the fault conditions.
7.2.2 Research Direction for Developing Mathematical Morphological Fault
Detection and Diagnostic Tools
Mathematical morphology is a time-domain based technique that is used to
study random sets generated through various nonlinear transforms to extract
information about the sets. In signal analysis, the set contains quantitative description
of the geometrical structure and topography of the signal, and by means of MM
transforms this information can be extracted and displayed in complete time-domain
in either on the Euclidian space or Cartesian coordinate system.
In Chapter 3, the mathematical description of the fundamental MM transforms
that underpins the concept and mechanism in signal transformation have been
provided. The genesis of all MM transforms and techniques are the dilation and
erosion transforms. The dilation and erosions are dual transforms, however the action
of one cannot be undone by the other yet they operate so effectively when combined
to form different nonlinear MM filters. This has been effectively shown in the
development of the DOCAS algorithm.
In signal analysis and transformation using the MM techniques, the signal
profile is depicted directly in time domain as opposed to other techniques based on
integral transforms such as Fourier and Wavelet Transforms which process signal in
frequency domain. The MM signal processing technique involves the use of a
filtering probe called the structuring element (SE). The SE interacts with the signal
under investigation by sliding through it and capturing any variation in the signal to

Chapter 7: Conclusions and Future Directions 191
extract the required features within the neighbourhood of the SE. The added
advantage in MM techniques is the mathematical simplicity which mainly involves
addition, subtraction, maximum and minimum operations as compared to the integral
transforms thus allowing for faster computation when investigating the same signal.
Moreover, MM exhibits superior functional characteristics when processing non-
periodical and distorted waveforms. Signals with deformities or complicated shape
are decomposed into certain parts and are separately kept from the background signal
for feature extraction while preserving the main characteristic of the signal. Thus,
this characteristic of MM allows it to extract information from the signals embedded
in noise while suppressing the noise and reconstruct the original signal [150].
The fundamentals and operational concepts of MM as portrayed in Chapter 3
and demonstrated in Chapters 4, 5 and 6 are formal and general enough that they can
be applied to the analysis of signals of any geometrical shapes for feature extraction
and fault detection. Thus, to realize fully the potential of MM technique in power
system signal analysis for fault detection and condition monitoring, research into
proposing and developing MM based tools should be encouraged. The following
provides a guideline to future research
❖ The MM techniques make use of strategic combination of the dilation, erosion,
open and close transforms to develop filtering functions. There is no specific
guide as to how to combine theses transforms. There are however, generalised
nonlinear filters available that can be used, and the reader should be curious
enough to explore the numerous reference sources cited in Chapter 3. Selection
of the generalise filter type and how to apply is not restricted, but the purpose
for the use of the filter should be the guide or basis on which the filter or
combination of should be determined.
❖ To minimize processing time, an appropriate data window size should be
selected. MM can use small size window for real-time signal processing. The
size of the data window can be determined based on the sampling rate.
❖ The structuring element is very fundamental to the effectiveness of the MM
based fault detection and diagnostic tool. Thus, the selection or design of an
optimal SE will enhance the functional efficiency of the MM filter for the
purpose it is designed for. The SE is a probing filter and collects information
when it interacts with the signal under investigation. Thus, MM is the study of

192 Chapter 7: Conclusions and Future Directions
how different SEs interact with the signal under investigation [132]. It has been
noted that, difficulties in implementation can occur when large SEs are utilised.
Thus, decomposition of the large SE into smaller SEs for a combined
segmented implementation of the SE has been proposed as a solution by [158]
and applied in this research. The reader is referred to Section 3.4 and
Subsection 3.4.4 as a guide to designing and/or selecting the optimal SE
Furthermore, Gautam and Brahma [157] have made an attempt at providing
guidelines for selection of an optimal SE for MM based tools for detecting
power system disturbances, hence the reader is referred to this reference as a
starting point.
7.2.3 Research Direction towards the Development of Adaptive OC Protection
System for AC Distribution Networks Increased DERs
Section 2.2 provides a description of protection system devices for radial
distribution feeder which include devices such as OC relays, ACRs and fuses. These
devices are current sensing devices and are only triggered when a fault current above
the specified threshold rating such as the pickup setting of the relays, ACRs and the
fuse rating exist. These devices function in tandem and in a coordinated manner for
reliable, sensitive and selective OC protection.
The traditional method in distribution network protection system coordination
study requires considerable data including; network topology, distribution substation,
distribution feeders, loads and protective device characteristics [1]. The procedure
includes;
• Computing the available maximum and minimum fault MVA values at every
point in the distribution network feeder where a protective device will be
located. This is equivalent to computing the maximum and minimum values
of the Thevenin equivalent impedance at those locations. Usually these data
are obtained via load flow and short circuit (fault) studies.
• The threshold limit and rating of the protective devices are determined based
on the fault MVA information obtained.
The traditional method (procedure) in protection system coordination study still
holds ground, however additional and innovative means of maintaining protection
coordination in the presence of increased DER penetration is necessary, and

Chapter 7: Conclusions and Future Directions 193
numerous researches have been conducted and are being conducted to proposed
reliable protection OC protection schemes in the presence of increased DER levels.
In Chapter 4 it was shown that the increased Penetration of DER at the
distribution network feeders reduces the fault current magnitude seen by the feeder
substation relay. This phenomenon was demonstrated analytically and by simulations
in Sections 4.2 and 4.7 respectively. The degree of fault current reduction is subject
to the level of penetration of the DER, the location of the fault with respect to the
location of the DER and the distance to fault from the feeder substation.
Furthermore, the available fault current is affected due to the intermittency of the RE
based DERs and network topology change. The reduction in fault current magnitude
will compromise the feeder OC protection with obvious being the designed (fixed)
threshold parameter setting (pickup setting and rating) of the OC relays, ACR and
the fuse respectively. If the generated fault current is less than 2 times the threshold
parameter setting of the protection device, the fault will not be detected by that
device. Moreover, the reduction in fault current magnitude leads to the following
protection system concerns;
Loss of Coordination of the Protective Devices: Protection system
coordination is maintained through correct operating time and sequence of operation
of each device within the protection scheme. The operating time is inversely
proportional to the detected fault current magnitude and based on the operating curve
of each device, the operating time with intentional delay is determined. The relay
operating curve is determined based on the time dial setting (TDS) and the plug
setting (PS) where both are fixed parameters, and the TDS is subject to the fault
current picked up by the relay. Loss of coordination results in sequential
misoperation or false operation of the relays depending on their location with respect
to the location of the fault and level of fault current magnitude with respect to their
point of placement [183],[184].
Reduced reach of the relay/Protection Blinding: Zone of protection discussed
in Section 2.2 defines the range of coverage (reach) of OC relays and depends on the
fault current pickup setting. The fault current pickup setting is a fixed parameter
determined based on the available fault current without DER penetration. Suppose a
fault occurs within the designed zone of protection of the substation relay, but due to
the presence of say a large scale DER closer to the fault location, the DER will have
an increased contribution to the fault current consequently reducing the fault current

194 Chapter 7: Conclusions and Future Directions
available at the substation relay thus reducing the reach of the substation relay. And
if the increase in fault current magnitude is less than its fault current pickup setting,
the substation relay is blind to this fault [185].
False Tripping or Sympathetic: False or sympathetic tripping occurs when a
relay located near the substation on a feeder with DER also closer to the substation
trips when a fault occurs on an adjacent feeder coupled to the same substation.
Supposing R1 and R2 represent relays near the substation on the unfaulted and faulted
feeders respectively. Assuming the fault location on the faulted feeder is at a distance
away from the substation. It will take time for R2 to register sufficient fault current
above its pickup setting as compared to R1 which is fed by the DER closer to it.
Thus, R1 will trip before R2 due to the increased fault current from the DER [186],
[187].
Islanding Problems: Islanding problem occurs when a feeder (faulted or not)
is isolated from the grid with an active DER. The case of sympathetic tripping of R1
in the above scenario for the fault on the adjacent feeder is an islanding problem
where the DER and all loads on the unfaulted feeder are islanded [184],[187].
The issues highlighted are some of the concerns that must be taken into
consideration when designing or upgrading the OC protection schemes for
distribution network feeders with increased penetration of DERs. To overcome these
concerns, various methods and techniques have been proposed by different
researchers. The proposed techniques can be categorised as optimization based,
communication assisted based and other strategies which are summarised in Table
7.1 with their advantages and disadvantages. The list of methods presented is not
exhaustive, however is intended to show the direction for further research in adaptive
OC protection for AC distribution systems with increased DER penetration.
Table 7.1: Summary of OC Protection Schemes for Distribution Networks with Increased
DER Penetration
Method Main Feature Advantages Disadvantages
Online
modification of
OC relay
settings using
differential
evolution
algorithm
Centralise protection scheme.
The network status is
continuously monitored by
accessing data from multiple
relays and assumingly Digital
Fault Recorders (DFRs)
accessed via
communication/SCADA
▪ Almost real time
network status
update.
▪ Improves
protection
coordination
including
▪ System totally
depends on
maintaining active
communication and
SCADA
infrastructure.
▪ Failure of

Chapter 7: Conclusions and Future Directions 195
[188]. system. Using the data, the
pickup setting on relays and all
associated protective devices are
updated using load flow, fault
and sensitivity calculations to
maintain coordination.
selectivity and
sensitivity
communication
infrastructure will
render the scheme
ineffective.
Minimise sum
of operation
time of OC
relays
coordination
using modified
firefly
algorithm
(MFA) [95].
The time setting multiplier and
the plug setting of the OC relays
are minimised using the MFA
optimisation algorithm
iteratively to arrive at a
minimised sum of OC relays
coordination time.
▪ Fast optimised
coordination with
DERs with
reduced time to
coordinate
▪ Method is effective
only in smaller
networks.
▪ More DERs and
large-scale network
will increase
convergence time
Optimization
of fault current
limiter (FCL)
connected at
the point of
common
coupling using
Cuckoo
optimization
algorithm
(COA) and
linear
programming
(LP) [189].
The method combines COA
and LP where COA is used to
determine the OC relay pick up
setting in the presence of the
FCL for both grid connection
and islanded mode and LP is
used to determine an optimum
time dial setting of the relay for
coordination.
▪ Fast convergence.
▪ One setting for
both mode of
operation
▪ The system was
tested without DERs
connected. Its
performance under
intermittent DER
switching and
network topology
change has not been
evaluated.
Communicatio
n assisted non-
linear
programming
minimisation
method to
reduce
directional OC
relays
operating time
[190].
The technique uses non-linear
programming method for
optimising the time dial setting
and the pickup setting of the
directional OC relays to
maintain coordination.
▪ No FCL required.
▪ No adaptive
feature necessary.
▪ Entirely dependent
on maintaining
active
communication
link.
▪ No backup
Optimization
of
superconductin
g FCL
resistance to
determine the
OC relay
settings [191].
The superconducting FCL
current from equivalent voltage
sources depends on its
resistance. Thus, OC relay
pickup setting for coordination
can be achieved by optimising
FCL resistance.
▪ Assume fixed
voltage source,
thus no voltage
optimisation
required to
achieve relay
coordination.
▪ Cost increases with
number of
superconducting
FCL with increased
penetration of
DERs.

196 Chapter 7: Conclusions and Future Directions
Minimisation
of series FCL
resistance and
strategic
adaptive OC
relay
placement
[192].
The resistance of the FCL is
decreased below the critical
value and simultaneously
adjusting one relay setting for
adaptive relaying. The
placement of the adaptive relay
is critical to maintain
coordination with other relays.
▪ Reduced FCL
resistance will
reduce FCL size.
Reduce cost of
FCL
▪ Additional feature is
required for making
the selected relay
adaptive with
increased DER
penetration, load
condition and
intermittency.
Harmonic
distortion
restrained
protection
scheme [193] .
Non-linear optimisation
technique is used determine the
DER penetration level to
operate within acceptable
harmonic distortion limit as not
compromise protection scheme.
Protection system is designed
within this constrain as well
other protection requirements.
▪ Harmonic inject is
necessary for this
protection scheme
and suitable for
inverter interfaced
DERs.
▪ Scheme is only
limited to inverter
interfaced DERs
Optimised
DER sizing
and placement
to retain OC
relay settings
[194].
Genetic algorithm is used to
optimally size the DERs and
where to place them to avoid
compromising the relay
configuration to maintain
coordination.
▪ No changes to the
original relay
settings
▪ Restriction on the
growth of the power
system. Increased
penetration of
DERs will upset
coordination.
Adaptive
relaying using
state detection
algorithm
[195].
Individual OC relay setting is
updated through state detection
algorithm by detecting voltage
and current signals.
▪ Applicable in both
grid connected
and islanded
mode.
▪ Reliable under
steady state
operating condition.
▪ Coordination can be
lost during dynamic
load variations and
topological changes.
Critical relay
setting for
coordination is
estimated
based on
steady-state
network
reduction [196,
197].
The steady state relay settings to
maintain coordination are
calculated assuming the DERs
inject currents and the current
from the DERs estimated.
▪ The scheme
considers the
intermittency of
the DERs.
▪ The run time delay
increases with
network size.
Fault signal
magnitude is
tracked using
recursive DFT
with relay
setting
optimisation
achieved using
The power system signals are
continuously monitored f and
DFT is used to calculate their
magnitudes. These parameters
used by Fuzzy logic-based
optimization tool to set the
relays for coordination based on
network conditions.
▪ Limited to few
network
topologies
▪ System is not
scalable to cover all
possible network
topologies with
increased DERs.

Chapter 7: Conclusions and Future Directions 197
Fuzzy logic
[45].
Adaptive
protection
based on
optimised
Thevenin
parameter
estimation
[44].
Communication network is
used to transmit data from relays
and DFRs to calculate the
Thevenin equivalent parameters
under fault and normal
conditions. Current is estimated
based on these calculations and
the relay settings are adjusted.
▪ Relay settings for
coordination is
achieved.
▪ Active
communication
network is required.
▪ Computational
delay will increase
with complexity of
the network.
7.2.4 Research Direction towards the Development of Adaptive OC Protection
System for DC Power Systems
Implementation of adequate protection schemes in DC distribution systems
are not well developed and still at their infancy as opposed to protection schemes in
AC distribution systems. While DC system OC protection schemes applies almost
identical principle as OC protection scheme in AC systems, direct adaptation of
protective devices such as CBs designed for AC systems is practically not possible.
The inherent lack of zero-crossing in the DC fault current will not actuate the trip
mechanism of the AC CBs. Moreover, if the AC CB does trip, the mechanical
contact separation will initiate arcing in the CB, and since there is no zero-crossing to
permit natural extinguishing of the arc, the arc will sustain, and this is undesirable.
Development of protective devices suitable for application in DC distribution
system constitute a major research area in proposing and implementing secure and
dependable protective schemes that would be reliable and sensitive while being
selective to ensure service continuity and enhance performance efficiency of the DC
system. Thus, future research directions in DC system protection include research
into developing DC protective devices and appropriate adaptive protective schemes
to satisfy performance requirements.
Therefore, this discussion is intended to create awareness in the current state
of research in proposing and developing different protection schemes for DC power
systems. The advantages and disadvantages of protective devices and techniques are
discussed to assist in directing research focus in the promising technologies.
In order to propose and/or develop suitable protection scheme for the DC
system, the nature of the faults and the fault signal (current and voltage)
characteristics must be understood. A typical DC distribution system is depicted in

198 Chapter 7: Conclusions and Future Directions
Figure 7.1 consisting of PV array, battery energy storage system (BESS) and
connected to the utility AC grid via a bidirectional converter. The DC distribution
system derives energy from the PV array thought the unidirectional DC-DC
converter, the BESS which includes the bidirectional DC-DC converter and the AC
grid through the bidirectional AC-DC/DC-AC (rectifier/inverter) converter. The DC
system can aggregate multiple energy sources including RE based DERs, and
considering the intermittency of the RE based DERs, the energy sources are managed
by the energy management system (EMS) for intelligent load sharing. The DC loads
are connected to the DC system via DC distribution feeders. This system is not
immune to any fault conditions; largely short-circuit faults that can occur on either
the DC buses or the feeders.
Faults in DC Systems: DC systems can suffer from two possible cases of
short-circuit fault conditions. These are pole-to-pole short circuit which can occur
between the positive and negative conductors and pole-to-ground which can occur
between positive or negative conductor and the ground or both positive and negative
conductors shorted to the ground. The pole-to-pole fault condition generally results
in low fault impedance and can be more devastating with larger fault current
magnitude than the pole-to-ground fault with fault current path through the
grounding resistance. For a pole-to-ground fault current to exist, the system must be
grounded (which is not shown in Figure 7.1). Depending on the grounding resistance,
a pole-to-ground fault can have either low or high fault impedance which dictates the
magnitude of the fault current [198],[199].
Fault Locations: Short-circuit faults can occur at any location on the DC
system including DC buses and DC distribution feeders. Bus faults are more severe
as multiple energy sources can be connected to a bus and thus feed the fault
simultaneously as well as from sources on coupled adjacent buses. DC feeders are
connected to DC busses and during fault, the local sources connected to that bus
directly linking the feeder and closer to the point of fault supplies the larger
component of the fault current. The location of the fault thus dictates fault current
magnitudes depending on the number of energy sources feeding the fault and the
fault resistance at the point of fault with respect to the energy sources [200].
In Figure 7.1, the direction of current flow during normal operation is indicated
by the dash line arrow and the direction of the fault current during any of the short

Chapter 7: Conclusions and Future Directions 199
circuit fault conditions is indicated by the solid line arrow. Thus, during fault, all
energy sources within the EMS through the power electronic converters inject fault
current. The amount of the fault current contribution depends on each DER and their
associated converters which also determine the fault resistance at the point of fault
with respect to the feeding sources. It is imperative to correctly determine the rating
of the fault current interrupting devices at the point of placement with respect to the
energy sources and their associated converters. Moreover, considering the
intermittency of the RE based DERs, the fault impedance will vary accordingly.
Thus, it is implied that the protection scheme must be adaptive to the changing
operating conditions to be effective.
DC System Short-circuit Fault Current Characteristics: During short-circuit
faults, the fault current rises to a certain maximum value then oscillates with an
exponential decay to a steady state value. The transition period in which the fault
current experiences the exponential decaying oscillation is the transient period and
the rate at which the oscillation decays to steady-state depends on the time constant
defined by the capacitance of the DC-link capacitor (C), the inductance (L) and
resistance (R) of the line seen at the point of fault. The transient period can be very
fast and maximum current experience during this period can be devastating for the
sensitive electronics. The power electronic converters have the inherent switching
Figure 7.1: A typical DC power distribution system

200 Chapter 7: Conclusions and Future Directions
characters and reverse blocking diodes characteristic to protect themselves. However,
to ensure complete protection, protective devices must be able to respond within this
period to protect the system [201],[202].
DC System Protective Devices: Current sensing devices such as fuses and
CBs have been traditionally used as protective devices in DC systems. However,
considering the complex nature of DC fault current, simplistic devices such as fuses
and CBs on their own will not provide complete protection of DC systems.
Moreover, these devices inherently lack the functional flexibility for coordination
with other devices within the protection scheme for a reliable, sensitive and selective
protection of the DC system [203],[199].
In Table 7.2 a summary of the protective devices used in DC systems is
provided. The list highlights the trend in the development of DC protectives devices,
their main features, advantages and disadvantages. Implementation of any reliable
protection scheme is imperative on the effectiveness of the devices within the
scheme, thus future research in DC system protection also require research into
developing protective devices conducive for application in DC systems considering
the dynamics of the fault current signal as discussed.
Table 7.2: Summary of Protective Devices used DC Distribution Systems
Device Main Features Advantages Disadvantages
Fuses
[204],[205]
▪ Connected in series with
protected device for fault
current interruption.
▪ Operates when the thermal
(threshold) limit of the
fusible link made up of
copper or silver strip is
exceeded due to increased
fault current.
▪ Fuse rating (thermal limit)
of the fuse depends on
current-time and voltage.
▪ Cheap
▪ Can be used in hybrid
configuration for back
up protection.
▪ Can be used at the DC
feeders at the load end.
▪ Can interrupt high
inrush and surge
current from DC
equipment/device
switching.
▪ Selection of fuse rating
can be difficult due to
high fault current and
the small time constant
of the fault current
during the transient
period.
▪ Slower melting time of
the fusible link could
prevent the fuse from
interrupting fault
current with small time
constant.
▪ Conversely larger fault
current time constant
compared to the
melting time of the
fusible link can ignite
an arc.

Chapter 7: Conclusions and Future Directions 201
▪ Does not have
flexibility for
coordination with other
protective devices.
DC Circuit
Breakers
(DCCB)
[206] [207]
▪ Connected in series with
protected device for fault
current interruption.
▪ Moulded-case CB
(MCCB) with thermal or
magnetic tripping
mechanism operates on
sensing fault current
exceeding the threshold
limit.
▪ Fast interruption of
fault current.
▪ Suitable for DC system
protection including
HVDC
▪ MCCB contact
mechanisms can fail to
separate due to the
small time constant of
the DC link capacitor
discharge current
▪ Could fail to clear fault
in sensitive LVDC
systems
▪ Could fail to clear faults
in highly inductive
systems.
Solid State
Circuit
Breakers
(SSCB)/Sw
itches
[208],
[209],
[210].
▪ Power electronics-based
CBs developed to
overcome the short
comings of Fuses and
DCCBs.
▪ The SSCBs utilise the
switching characteristics of
the solid-state power
electronic devices. Three
main SSCBs are:
- Gate-turn off thyristor
(GTO) switch,
- Insulated-gate bipolar
transistor (IGBT) switch,
- Insulated-gate
commutated thyristor
(IGCT) switch
▪ Applicable in LVDC
and HVCD systems
▪ Overcome the short
comings of fuses and
CBs
▪ Fast switching speed
▪ IGBT based switches
can withstand high
fault current
▪ IGCT switches
typically have low
losses
▪ GTO with emitter turn
off (ETO) allows for
high power application
and fast switching.
▪ IGBT switches incur
high power losses
▪ The ICGT is a
unidirectional switch
▪ The fast switching
characteristic of the
GTO/ETO switch can
be problematic at times
especially in LVDC
systems.
▪ One of disadvantage
power electronic
devices especially
systems with
MOSFETs is the high
voltage drop.
Digital
Relays
[211]
▪ Continuously monitors
network condition by
measuring voltage and
current signal as well as
calculating their
derivatives
▪ Work based on accurate
measurement of voltage
and current signal.
▪ Apart from the
calculating the di/dt and
dv/dt, multiple
algorithms using signal
processing techniques
can be installed.
▪ All measurements must
be coordinated and
synchronised.
▪ Active Communication
network is required for
IEDs such as relays to
maintain coordination
for intelligent
protection.

202 Chapter 7: Conclusions and Future Directions
DC Distribution System Protection Schemes
There are two types of protection schemes widely researched and proposed for
implementation in DC systems, and these are known as the non-unit protection and
unit protection [212]. The discussions contained herein highlight some of the
advantages and disadvantages of these schemes as an attempt at directing further
research in proposing and developing sound protection schemes for DC systems.
Non-unit Protection Scheme: The Non-unit protection scheme requires
placement of fault current interrupting devices in series with the element to be
protected or at the point of protection. This scheme operates on similar principle as
the OC protection in AC systems where current is used as the threshold metric, such
that, if the fault current exceeds the pickup setting of the protective devices which
violates their normal limit of operation defined by their thermal or magnetic
characteristics, the fault current is interrupted.
The Non-unit protection depends on accurately monitoring and/or measuring the
voltage and current signals as well as the time derivatives of voltage (dv/dt), current
(di/dt) and the impedance at the point of fault [198],[213]. There is merit in this
technique; however, there is no flexibility in the technique being adaptive
considering the fixed threshold setting and/or rating of the protective devices, and the
intermittent nature of RE based DERs as well as multisource fault current. The
threshold parameters in the protective devices in the scheme must be adaptive to
ensure secure and reliable protection. Moreover, while being sensitive, the Non-unit
protection scheme lacks the flexibility for selectivity. The protective devices will
instantaneously operate as long as their threshold limits are violated, which is an
advantage as backup protection. Furthermore, the instantaneous tripping
characteristic presents difficulties in enabling coordination with other protective
devices within the non-unit protection scheme [201],[211].
To ensure secure and robust protection of the DC system, improvement to the
non-unit protection scheme would require research into making this scheme adaptive
while enabling the flexibility for selectivity and coordination [212].
Unit Protection Scheme: The unit protection scheme relies on the use of
intelligent electronic devices (IEDs) such as digital relays as current sensors to
continuously monitor the status of the network as well as maintaining an active
communication network to transfer network status information (fault data) between

Chapter 7: Conclusions and Future Directions 203
relays on the adjacent nodes using algorithms such as generic object-oriented
substation events (GOOSE) [214]. The unit protection scheme has the flexibility to
provide reliable, sensitive and selective DC system protection [215]. However, it
lacks the flexibility to provide backup protection to zones or circuits outside the
designated zone of protection. Thus, must be implemented together with a non-unit
protection scheme to enhance the overall protection system reliability. Moreover, the
effectiveness of this scheme relies on maintaining an active communication network,
thus installing non-unit protection ensures backup protection in the event of
communication network failure [203].
There are two classifications of unit protection schemes, the Data-based
protection scheme and the event-based protection scheme.
Data-based Protection Scheme: In this proposed scheme, a single relay/unit
controls multiple CBs installed at specific nodes under the jurisdiction of that unit.
Fault data (current and voltage) are measured at the converter and/or the bus and the
feeders using digital fault recorders. This data is sent to the controlling unit and using
differential fault current technique or fault detection algorithm, the fault can be
detected. If fault exist, the controlling unit for the fault node or link sends trip signal
to the appropriate CB. A status update is communicated to all interconnected
adjacent units to issue trip signals to appropriate CBs on the other end of the faulted
link ensuring protection reliability in case of the adjacent CB failure, thus isolating
the faulted segment. This arrangement enables mechanism for zoning and selective
fault isolation. The data-based protection is data intensive and its integrity and
effectiveness depends on high speed data communication network and proper
synchronising between adjacent control units [214],[215].
Event-based Protection Scheme: In this proposed scheme, fault data is only
measured at the local bus that couples the local load feeder, hence it is less data
intensive as compared to data-based protection scheme. Each energy source
supplying its local load coupled to the local bus is equipped with a current
sensor/relay and associated CB. Fault is detection by the local relay (unit) is achieved
through techniques such as detecting the change in fault current time derivative
(di/dt) as applied in the non-unit protection schemes. Use of superconducting fault
current limiters (SFCL) has been proposed for use in this protection scheme where
the electrical distance can be appropriately optimised by optimising the impedance of
the SFCL for fault detection and localization. Other schemes requiring installation of

204 Chapter 7: Conclusions and Future Directions
artificial inductive line impedances (AILI) at each feeder have been proposed in this
protection scheme. AILIs have the characteristic to significantly influence the di/dt
characteristic of the fault current [216].
The local protection units using the fault detection technique such as change in
di/dt determines if a fault has occurred. By sensing the rate of change of the fault
current each unit determines if the fault is a local fault, interconnected feeder fault or
an adjacent feeder or adjacent bus fault. This information is communicated to all
local bus protection units to determine the fault location and activate the appropriate
CB. In the event of a bus fault (severe case), the communication process is omitted
and the local protection unit closer to the fault bus takes immediate action [217].
Fault detection and isolation have said to have been achieved within 30 ms using this
technique.
Cost implication has always been cited as an impediment to the implementation of
unit-protection scheme due to additional cost of maintaining communication network
infrastructure and relays, sensors and DFRs, etc. that are necessary for the realisation
of this scheme. However, with increased interest in smart grid and DC power
systems there will be increase investment in sensors and communication
infrastructure thus enabling the deployment of such intelligent protection schemes
such as the unit-protection in both AC and DC distribution systems [218],[219].

Bibliography 205
Bibliography
[1] P. M. Anderson, Power system protection. Wiley, 1998.
[2] J. L. Blackburn and T. J. Domin, Protective relaying: principles and
applications. CRC press, 2006.
[3] D. Das, Electrical power systems. New Age International, 2007.
[4] U. DOE, "Enabling modernization of the electric power system,"
Quadrennial technology review, vol. 22, 2015.
[5] F. Z. Peng, Y. W. Li, and L. M. Tolbert, "Control and protection of power
electronics interfaced distributed generation systems in a customer-driven
microgrid," in Power & Energy Society General Meeting, 2009. PES'09.
IEEE, 2009, pp. 1-8: IEEE.
[6] M. H. Nazari and M. Ilic, "Technical challenges in modernizing distribution
electric power systems with large number of distributed generators," in
PowerTech, 2009 IEEE Bucharest, 2009, pp. 1-8: IEEE.
[7] A. Keane, Q. Zhou, J. W. Bialek, and M. O'Malley, "Planning and operating
non-firm distributed generation," IET Renewable Power Generation, vol. 3,
no. 4, pp. 455-464, 2009.
[8] B. Kroposki, R. Lasseter, T. Ise, S. Morozumi, S. Papatlianassiou, and N.
Hatziargyriou, "Making microgrids work," IEEE power and energy
magazine, vol. 6, no. 3, 2008.
[9] J. Moccia et al., "Pure power. wind energy targets for 2020 and 2030," 2011.
[10] N. Nakicenovic et al., Special report on emissions scenarios (SRES), a
special report of Working Group III of the intergovernmental panel on
climate change. Cambridge University Press, 2000.
[11] H. Li and Z. Chen, "Overview of different wind generator systems and their
comparisons," IET Renewable Power Generation, vol. 2, no. 2, pp. 123-138,
2008.
[12] N. S. Chouhan and M. Ferdowsi, "Review of energy storage systems," in
North American Power Symposium (NAPS), 2009, 2009, pp. 1-5: IEEE.
[13] J. P. Lopes, N. Hatziargyriou, J. Mutale, P. Djapic, and N. Jenkins,
"Integrating distributed generation into electric power systems: A review of
drivers, challenges and opportunities," Electric power systems research, vol.
77, no. 9, pp. 1189-1203, 2007.
[14] F. Díaz-González, A. Sumper, O. Gomis-Bellmunt, and R. Villafáfila-Robles,
"A review of energy storage technologies for wind power applications,"
Renewable and sustainable energy reviews, vol. 16, no. 4, pp. 2154-2171,
2012.
[15] P. Basak, S. Chowdhury, S. H. nee Dey, and S. Chowdhury, "A literature
review on integration of distributed energy resources in the perspective of
control, protection and stability of microgrid," Renewable and Sustainable
Energy Reviews, vol. 16, no. 8, pp. 5545-5556, 2012.
[16] J. J. Justo, F. Mwasilu, J. Lee, and J.-W. Jung, "AC-microgrids versus DC-
microgrids with distributed energy resources: A review," Renewable and
Sustainable Energy Reviews, vol. 24, pp. 387-405, 2013.
[17] S. Conti, "Analysis of distribution network protection issues in presence of
dispersed generation," Electric Power Systems Research, vol. 79, no. 1, pp.
49-56, 2009.

206 Bibliography
[18] G. Chen, D. Jiang, Z. Lu, and Z. Wu, "A new proposal for solid state fault
current limiter and its control strategies," in Power Engineering Society
General Meeting, 2004. IEEE, 2004, pp. 1468-1473: IEEE.
[19] Z. Lu, D. Jiang, and Z. Wu, "A new topology of fault-current limiter and its
parameters optimization," in Power Electronics Specialist Conference, 2003.
PESC'03. 2003 IEEE 34th Annual, 2003, vol. 1, pp. 462-465: IEEE.
[20] A. Girgis and S. Brahma, "Effect of distributed generation on protective
device coordination in distribution system," in Power Engineering, 2001.
LESCOPE'01. 2001 Large Engineering Systems Conference on, 2001, pp.
115-119: IEEE.
[21] K. Kaygusuz, "Energy for sustainable development: A case of developing
countries," Renewable and Sustainable Energy Reviews, vol. 16, no. 2, pp.
1116-1126, 2012.
[22] S. Xue, F. Gao, W. Sun, and B. Li, "Protection principle for a DC distribution
system with a resistive superconductive fault current limiter," Energies, vol.
8, no. 6, pp. 4839-4852, 2015.
[23] M. K. Alam, F. Khan, J. Johnson, and J. Flicker, "A comprehensive review of
catastrophic faults in PV arrays: types, detection, and mitigation techniques,"
IEEE Journal of Photovoltaics, vol. 5, no. 3, pp. 982-997, 2015.
[24] V. B. R. Commission, "Power line Bushfire Safety Taskforce, Final Report
Chapter 3.4. 1. Rapid Earth Fault Current Limiter, Melbourne," Victoria,
2011.
[25] S. M. Madani, "Analysis and design of power system protections using graph
theory," 1999.
[26] A. G. Phadke and J. S. Thorp, Computer relaying for power systems. John
Wiley & Sons, 2009.
[27] Y. G. Paithankar and S. Bhide, Fundamentals of power system protection.
PHI Learning Pvt. Ltd., 2011.
[28] M. Baran and I. El-Markabi, "Adaptive over current protection for
distribution feeders with distributed generators," in Power Systems
Conference and Exposition, 2004. IEEE PES, 2004, pp. 715-719: IEEE.
[29] S. H. Horowitz and A. G. Phadke, Power system relaying. John Wiley &
Sons, 2008.
[30] S. Zocholl, J. Akamine, A. Hughes, M. Sachdev, L. Scharf, and H. Smith,
"Computer representation of overcurrent relay characteristics: IEEE
committee report," IEEE transactions on power Delivery, vol. 4, no. 3, pp.
1659-1667, 1989.
[31] C. A. Kramer and W. A. Elmore, "Flexible inverse overcurrent relaying using
a microprocessor," IEEE transactions on power delivery, vol. 5, no. 2, pp.
915-923, 1990.
[32] M. V. Yalla, "A digital multifunction protective relay," IEEE Transactions on
Power Delivery, vol. 7, no. 1, pp. 193-201, 1992.
[33] IEEE STD C37.112-1996: Inverse-Time Characteristics Equations for
Overcurrent Relays, 1996.
[34] G. Benmouyal et al., "IEEE standard inverse-time characteristic equations for
overcurrent relays," IEEE Transactions on Power Delivery, vol. 14, no. 3, pp.
868-872, 1999.
[35] Z. N. Stojanovic and M. B. Djuric, "Table Based Algorithm for Inverse-Time
Overcurrent Relay," Journal of Electrical Engineering, vol. 65, no. 4, pp.
213-220, 2014.

Bibliography 207
[36] K. A. Wheeler, S. O. Faried, and M. Elsamahy, "Assessment of distributed
generation influences on fuse-recloser protection systems in radial
distribution networks," in Transmission and Distribution Conference and
Exposition (T&D), 2016 IEEE/PES, 2016, pp. 1-5: IEEE.
[37] P. Mohammadi and S. Mehraeen, "Challenges of PV integration in low-
voltage secondary networks," IEEE Transactions on Power Delivery, vol. 32,
no. 1, pp. 525-535, 2017.
[38] S. M. Brahma and A. A. Girgis, "Development of adaptive protection scheme
for distribution systems with high penetration of distributed generation,"
IEEE Transactions on power delivery, vol. 19, no. 1, pp. 56-63, 2004.
[39] S. Javadian and M.-R. Haghifam, "Implementation of a new protection
scheme on a real distribution system in presence of DG," in Power System
Technology and IEEE Power India Conference, 2008. POWERCON 2008.
Joint International Conference on, 2008, pp. 1-7: IEEE.
[40] P. Mahat, Z. Chen, B. Bak-Jensen, and C. L. Bak, "A simple adaptive
overcurrent protection of distribution systems with distributed generation,"
IEEE Transactions on Smart Grid, vol. 2, no. 3, pp. 428-437, 2011.
[41] C.-S. Chen, C.-T. Tsai, S.-C. Hsieh, C.-T. Hsu, and C.-H. Lin, "Adaptive
relay setting for distribution systems considering operation scenarios of wind
generators," in Industrial & Commercial Power Systems Technical Conf
(I&CPS), 2013 IEEE/IAS 49th, 2013, pp. 1-8: IEEE.
[42] H. Yazdanpanahi, Y. W. Li, and W. Xu, "A new control strategy to mitigate
the impact of inverter-based DGs on protection system," IEEE Transactions
on Smart grid, vol. 3, no. 3, pp. 1427-1436, 2012.
[43] C. Su, Z. Liu, Z. Chen, and Y. Hu, "An adaptive control strategy of converter
based DG to maintain protection coordination in distribution system," in
Innovative Smart Grid Technologies Conference Europe (ISGT-Europe),
2014 IEEE PES, 2014, pp. 1-6: IEEE.
[44] S. Shen et al., "An adaptive protection scheme for distribution systems with
DGs based on optimized Thevenin equivalent parameters estimation," IEEE
Transactions on Power Delivery, vol. 32, no. 1, pp. 411-419, 2017.
[45] D. S. Kumar, D. Srinivasan, and T. Reindl, "A fast and scalable protection
scheme for distribution networks with distributed generation," IEEE
Transactions on Power Delivery, vol. 31, no. 1, pp. 67-75, 2016.
[46] F. B. Costa, A. Monti, and S. C. Paiva, "Overcurrent protection in distribution
systems with distributed generation based on the real-time boundary wavelet
transform," IEEE Transactions on Power Delivery, vol. 32, no. 1, pp. 462-
473, 2017.
[47] J. Buse, D. Shi, T. Ji, and Q. Wu, "Decaying DC offset removal operator
using mathematical morphology for phasor measurement," in Innovative
Smart Grid Technologies Conference Europe (ISGT Europe), 2010 IEEE
PES, 2010, pp. 1-6: IEEE.
[48] Y. Guo, M. Kezunovic, and D. Chen, "Simplified algorithms for removal of
the effect of exponentially decaying DC-offset on the Fourier algorithm,"
IEEE Transactions on power delivery, vol. 18, no. 3, pp. 711-717, 2003.
[49] J.-C. Gu and S.-L. Yu, "Removal of DC offset in current and voltage signals
using a novel Fourier filter algorithm," IEEE Transactions on Power
Delivery, vol. 15, no. 1, pp. 73-79, 2000.

208 Bibliography
[50] A. Rahmati and R. Adhami, "An accurate filtering technique to mitigate
transient decaying DC offset," IEEE Transactions on Power Delivery, vol.
29, no. 2, pp. 966-968, 2014.
[51] V. Torres, J. Guardado, H. Ruiz, and S. Maximov, "Modeling and detection
of high impedance faults," International Journal of Electrical Power &
Energy Systems, vol. 61, pp. 163-172, 2014.
[52] A. Ghaderi, H. L. Ginn III, and H. A. Mohammadpour, "High impedance
fault detection: A review," Electric Power Systems Research, vol. 143, pp.
376-388, 2017.
[53] N. I. Elkalashy, M. Lehtonen, H. A. Darwish, M. A. Izzularab, and I. T.
Abdel-maksoud, "Modeling and experimental verification of high impedance
arcing fault in medium voltage networks," IEEE Transactions on Dielectrics
and Electrical Insulation, vol. 14, no. 2, 2007.
[54] C. Kim, B. D. Russell, and K. Watson, "A parameter-based process for
selecting high impedance fault detection techniques using decision making
under incomplete knowledge," IEEE Transactions on Power Delivery, vol. 5,
no. 3, pp. 1314-1320, 1990.
[55] A.-R. Sedighi, M.-R. Haghifam, O. Malik, and M.-H. Ghassemian, "High
impedance fault detection based on wavelet transform and statistical pattern
recognition," IEEE Transactions on Power Delivery, vol. 20, no. 4, pp. 2414-
2421, 2005.
[56] A. Emanuel, D. Cyganski, J. Orr, S. Shiller, and E. Gulachenski, "High
impedance fault arcing on sandy soil in 15 kV distribution feeders:
contributions to the evaluation of the low frequency spectrum," IEEE
Transactions on Power Delivery, vol. 5, no. 2, pp. 676-686, 1990.
[57] N. Zamanan and J. K. Sykulski, "Modelling arcing high impedances faults in
relation to the physical processes in the electric arc," WSEAS Transactions on
power systems, vol. 1, no. 8, pp. 1507-1512, 2006.
[58] A. Sultan, G. Swift, and D. Fedirchuk, "Detecting arcing downed-wires using
fault current flicker and half-cycle asymmetry," IEEE Transactions on Power
Delivery, vol. 9, no. 1, pp. 461-470, 1994.
[59] W. Santos, F. Lopes, N. Brito, B. Souza, D. Fernandes Jr, and W. Neves,
"High impedance fault detection and location based on electromagnetic
transient analysis," in International Conference on Power Systems Transients
(IPST2013) em Vancouver, Canadá, Julho 18, 2013, vol. 20.
[60] M. S. Thomas, N. Bhaskar, and A. Prakash, "Voltage based detection method
for high impedance fault in a distribution system," Journal of The Institution
of Engineers (India): Series B, vol. 97, no. 3, pp. 413-423, 2016.
[61] J. Chen, B. Phung, D. Zhang, T. Blackburn, and E. Ambikairajah, "Study on
high impedance fault arcing current characteristics," in Power Engineering
Conference (AUPEC), 2013 Australasian Universities, 2013, pp. 1-6: IEEE.
[62] C. G. Wester, "High impedance fault detection on distribution systems," in
Rural Electric Power Conference, 1998. Papers Presented at the 42nd
Annual Conference, 1998, pp. c5-1: IEEE.
[63] A. Sharaf and S. Abu-Azab, "A smart relaying scheme for high impedance
faults in distribution and utilization networks," in Electrical and Computer
Engineering, 2000 Canadian Conference on, 2000, vol. 2, pp. 740-744:
IEEE.
[64] H. Calhoun, M. T. Bishop, C. H. Eichler, and R. E. Lee, "Development and
testing of an electro-mechanical relay to detect fallen distribution

Bibliography 209
conductors," IEEE Transactions on Power Apparatus and Systems, no. 6, pp.
1643-1650, 1982.
[65] C.-L. Huang, H.-Y. Chu, and M.-T. Chen, "Algorithm comparison for high
impedance fault detection based on staged fault test," IEEE transactions on
power delivery, vol. 3, no. 4, pp. 1427-1435, 1988.
[66] B. Aucoin and B. Russell, "Distribution high impedance fault detection
utilizing high frequency current components," IEEE Transactions on Power
Apparatus and Systems, no. 6, pp. 1596-1606, 1982.
[67] S.-J. Huang and C.-T. Hsieh, "High-impedance fault detection utilizing a
Morlet wavelet transform approach," IEEE Transactions on Power Delivery,
vol. 14, no. 4, pp. 1401-1410, 1999.
[68] Y. Sheng and S. M. Rovnyak, "Decision tree-based methodology for high
impedance fault detection," IEEE Transactions on Power Delivery, vol. 19,
no. 2, pp. 533-536, 2004.
[69] S. Samantaray and P. Dash, "High impedance fault detection in distribution
feeders using extended kalman filter and support vector machine,"
International Transactions on Electrical Energy Systems, vol. 20, no. 3, pp.
382-393, 2010.
[70] M. Eissa, G. A. Sowilam, and A. Sharaf, "A new protection detection
technique for high impedance fault using neural network," in Power
Engineering, 2006 Large Engineering Systems Conference on, 2006, pp. 146-
151: IEEE.
[71] I. Baqui, I. Zamora, J. Mazón, and G. Buigues, "High impedance fault
detection methodology using wavelet transform and artificial neural
networks," Electric Power Systems Research, vol. 81, no. 7, pp. 1325-1333,
2011.
[72] S. Samantaray, B. Panigrahi, and P. Dash, "High impedance fault detection in
power distribution networks using time–frequency transform and
probabilistic neural network," IET generation, transmission & distribution,
vol. 2, no. 2, pp. 261-270, 2008.
[73] A. Etemadi and M. Sanaye-Pasand, "High-impedance fault detection using
multi-resolution signal decomposition and adaptive neural fuzzy inference
system," IET generation, transmission & distribution, vol. 2, no. 1, pp. 110-
118, 2008.
[74] M.-R. Haghifam, A.-R. Sedighi, and O. Malik, "Development of a fuzzy
inference system based on genetic algorithm for high-impedance fault
detection," IEE Proceedings-Generation, Transmission and Distribution, vol.
153, no. 3, pp. 359-367, 2006.
[75] A. Bakar, M. Ali, C. Tan, H. Mokhlis, H. Arof, and H. Illias, "High
impedance fault location in 11 kV underground distribution systems using
wavelet transforms," International Journal of Electrical Power & Energy
Systems, vol. 55, pp. 723-730, 2014.
[76] A. Mahari and H. Seyedi, "High impedance fault protection in transmission
lines using a WPT-based algorithm," International Journal of Electrical
Power & Energy Systems, vol. 67, pp. 537-545, 2015.
[77] F. B. Costa, B. Souza, N. Brito, J. Silva, and W. Santos, "Real-time detection
of transients induced by high-impedance faults based on the boundary
wavelet transform," IEEE Transactions on Industry Applications, vol. 51, no.
6, pp. 5312-5323, 2015.

210 Bibliography
[78] S. Gautam and S. M. Brahma, "Detection of high impedance fault in power
distribution systems using mathematical morphology," IEEE Transactions on
Power Systems, vol. 28, no. 2, pp. 1226-1234, 2013.
[79] T. Gammon and J. Matthews, "Instantaneous arcing-fault models developed
for building system analysis," IEEE Transactions on Industry Applications,
vol. 37, no. 1, pp. 197-203, 2001.
[80] M. Jannati and L. Eslami, "Precise modeling of high impedance faults in
power distribution system in emtpworks software," Journal of Electrical
Engineering, 2013.
[81] W. Santos, N. Brito, B. Souza, and F. Pereira, "High impedance fault
modeling based on statistical data," in International Conference on Power
Systems Transients (IPST2015), 2015, pp. 1-8.
[82] J. Carr, "Detection of high impedance faults on multi-grounded primary
distribution systems," IEEE Transactions on Power Apparatus and Systems,
no. 4, pp. 2008-2016, 1981.
[83] L. E. Fisher, "Resistance of low-voltage ac arcs," IEEE Transactions on
Industry and General Applications, no. 6, pp. 607-616, 1970.
[84] M. Michalik, W. Rebizant, M. Lukowicz, S.-J. Lee, and S.-H. Kang, "High-
impedance fault detection in distribution networks with use of wavelet-based
algorithm," IEEE Transactions on Power Delivery, vol. 21, no. 4, pp. 1793-
1802, 2006.
[85] V. Torres, S. Maximov, H. Ruiz, and J. Guardado, "Distributed parameters
model for high-impedance fault detection and localization in transmission
lines," Electric Power Components and Systems, vol. 41, no. 14, pp. 1311-
1333, 2013.
[86] G. Vijayachandran and B. K. Mathew, "High impedance arcing fault
detection in MV networks using discrete wavelet transform and Artificial
Neural Networks," in Green Technologies (ICGT), 2012 International
Conference on, 2012, pp. 089-098: IEEE.
[87] M.-T. Yang, J.-C. Gu, J.-L. Guan, and C.-Y. Cheng, "Evaluation of
algorithms for high impedance faults identification based on staged fault
tests," in Power Engineering Society General Meeting, 2006. IEEE, 2006, p.
8 pp.: IEEE.
[88] N. Zamanan and J. Sykulski, "The evolution of high impedance fault
modeling," in Harmonics and Quality of Power (ICHQP), 2014 IEEE 16th
International Conference on, 2014, pp. 77-81: IEEE.
[89] T. Lai, L. Snider, E. Lo, and D. Sutanto, "High-impedance fault detection
using discrete wavelet transform and frequency range and RMS conversion,"
IEEE Transactions on Power Delivery, vol. 20, no. 1, pp. 397-407, 2005.
[90] Y. Zhao, B. Lehman, J.-F. de Palma, J. Mosesian, and R. Lyons, "Challenges
to overcurrent protection devices under line-line faults in solar photovoltaic
arrays," in Energy Conversion Congress and Exposition (ECCE), 2011 IEEE,
2011, pp. 20-27: IEEE.
[91] J. C. Wiles, "Photovoltaic system grounding," Southwest Technology
Development Institute College of Engineering New Mexico State University
October, 2012.
[92] O. Hegazy, J. Van Mierlo, and P. Lataire, "Analysis, modeling, and
implementation of a multidevice interleaved DC/DC converter for fuel cell
hybrid electric vehicles," IEEE transactions on power electronics, vol. 27,
no. 11, pp. 4445-4458, 2012.

Bibliography 211
[93] J. Flicker and J. Johnson, "Electrical simulations of series and parallel PV
arc-faults," in Photovoltaic Specialists Conference (PVSC), 2013 IEEE 39th,
2013, pp. 3165-3172: IEEE.
[94] X. Yao, L. Herrera, and J. Wang, "Impact evaluation of series dc arc faults in
dc microgrids," in Applied Power Electronics Conference and Exposition
(APEC), 2015 IEEE, 2015, pp. 2953-2958: IEEE.
[95] A. Tjahjono et al., "Adaptive modified firefly algorithm for optimal
coordination of overcurrent relays," IET Generation, Transmission &
Distribution, vol. 11, no. 10, pp. 2575-2585, 2017.
[96] S. Lu, B. Phung, and D. Zhang, "Study on DC series arc fault in photovoltaic
systems for condition monitoring purpose," in Universities Power
Engineering Conference (AUPEC), 2017 Australasian, 2017, pp. 1-6: IEEE.
[97] J. Johnson et al., "Differentiating series and parallel photovoltaic arc-faults,"
in Photovoltaic Specialists Conference (PVSC), 2012 38th IEEE, 2012, pp.
000720-000726: IEEE.
[98] D. A. Dini, P. W. Brazis, and K.-H. Yen, "Development of arc-fault circuit-
interrupter requirements for photovoltaic systems," in Photovoltaic
Specialists Conference (PVSC), 2011 37th IEEE, 2011, pp. 001790-001794:
IEEE.
[99] A. Dhoke and A. Mengede, "Challenges to overcurrent protection devices in
PV array during winter and low irradiation conditions in Australia," in
Innovative Smart Grid Technologies-Asia (ISGT-Asia), 2017 IEEE, 2017, pp.
1-6: IEEE.
[100] Y. Zhao, J.-F. De Palma, J. Mosesian, R. Lyons, and B. Lehman, "Line–line
fault analysis and protection challenges in solar photovoltaic arrays," IEEE
transactions on Industrial Electronics, vol. 60, no. 9, pp. 3784-3795, 2013.
[101] F. Schimpf and L. E. Norum, "Recognition of electric arcing in the DC-
wiring of photovoltaic systems," in Telecommunications Energy Conference,
2009. INTELEC 2009. 31st International, 2009, pp. 1-6: IEEE.
[102] F. M. Uriarte et al., "A DC arc model for series faults in low voltage
microgrids," IEEE Transactions on Smart Grid, vol. 3, no. 4, pp. 2063-2070,
2012.
[103] G.-S. Seo, K. A. Kim, K.-C. Lee, K.-J. Lee, and B.-H. Cho, "A new DC arc
fault detection method using DC system component modeling and analysis in
low frequency range," in Applied Power Electronics Conference and
Exposition (APEC), 2015 IEEE, 2015, pp. 2438-2444: IEEE.
[104] M. Naidu, T. J. Schoepf, and S. Gopalakrishnan, "Arc fault detection scheme
for 42-V automotive DC networks using current shunt," IEEE Transactions
on power electronics, vol. 21, no. 3, pp. 633-639, 2006.
[105] H. Hamilton and N. N. Schulz, "DC protection on the electric ship," in
Electric Ship Technologies Symposium, 2007. ESTS'07. IEEE, 2007, pp. 294-
300: IEEE.
[106] J. A. Momoh and R. Button, "Design and analysis of aerospace DC arcing
faults using fast fourier transformation and artificial neural network," in
Power Engineering Society General Meeting, 2003, IEEE, 2003, vol. 2, pp.
788-793: IEEE.
[107] X. Yao, L. Herrera, S. Ji, K. Zou, and J. Wang, "Characteristic study and
time-domain discrete-wavelet-transform based hybrid detection of series DC
arc faults," IEEE Transactions on Power Electronics, vol. 29, no. 6, pp.
3103-3115, 2014.

212 Bibliography
[108] R. D. Telford, S. Galloway, B. Stephen, and I. Elders, "Diagnosis of Series
DC Arc Faults—A Machine Learning Approach," IEEE Transactions on
Industrial Informatics, vol. 13, no. 4, pp. 1598-1609, 2017.
[109] T. Shimakage, K. Nishioka, H. Yamane, M. Nagura, and M. Kudo,
"Development of fault detection system in PV system," in
Telecommunications Energy Conference (INTELEC), 2011 IEEE 33rd
International, 2011, pp. 1-5: IEEE.
[110] R. Platon, J. Martel, N. Woodruff, and T. Y. Chau, "Online fault detection in
PV systems," IEEE Transactions on Sustainable Energy, vol. 6, no. 4, pp.
1200-1207, 2015.
[111] P. Ducange, M. Fazzolari, B. Lazzerini, and F. Marcelloni, "An intelligent
system for detecting faults in photovoltaic fields," in Intelligent systems
design and applications (ISDA), 2011 11th international conference on,
2011, pp. 1341-1346: IEEE.
[112] A. Chouder and S. Silvestre, "Automatic supervision and fault detection of
PV systems based on power losses analysis," Energy conversion and
Management, vol. 51, no. 10, pp. 1929-1937, 2010.
[113] S. Silvestre, A. Chouder, and E. Karatepe, "Automatic fault detection in grid
connected PV systems," Solar Energy, vol. 94, pp. 119-127, 2013.
[114] S. Spataru, D. Sera, T. Kerekes, and R. Teodorescu, "Photovoltaic array
condition monitoring based on online regression of performance model," in
Photovoltaic Specialists Conference (PVSC), 2013 IEEE 39th, 2013, pp.
0815-0820: IEEE.
[115] S. Vergura, G. Acciani, V. Amoruso, G. E. Patrono, and F. Vacca,
"Descriptive and inferential statistics for supervising and monitoring the
operation of PV plants," IEEE Transactions on Industrial Electronics, vol.
56, no. 11, pp. 4456-4464, 2009.
[116] B. Andò, S. Baglio, A. Pistorio, G. M. Tina, and C. Ventura, "Sentinella:
Smart monitoring of photovoltaic systems at panel level," IEEE Transactions
on Instrumentation and Measurement, vol. 64, no. 8, pp. 2188-2199, 2015.
[117] P. Guerriero, F. Di Napoli, G. Vallone, V. d'Alessandro, and S. Daliento,
"Monitoring and diagnostics of PV plants by a wireless self-powered sensor
for individual panels," IEEE Journal of Photovoltaics, vol. 6, no. 1, pp. 286-
294, 2016.
[118] Z. Yi and A. H. Etemadi, "Fault detection for photovoltaic systems based on
multi-resolution signal decomposition and fuzzy inference systems," IEEE
Transactions on Smart Grid, vol. 8, no. 3, pp. 1274-1283, 2017.
[119] C.-L. Kuo, J.-L. Chen, S.-J. Chen, C.-C. Kao, H.-T. Yau, and C.-H. Lin,
"Photovoltaic energy conversion system fault detection using fractional-order
color relation classifier in microdistribution systems," IEEE Transactions on
Smart Grid, vol. 8, no. 3, pp. 1163-1172, 2017.
[120] S. Chae, J. Park, and S. Oh, "Series DC arc fault detection algorithm for DC
microgrids using relative magnitude comparison," IEEE Journal of Emerging
and Selected Topics in Power Electronics, vol. 4, no. 4, pp. 1270-1278, 2016.
[121] H. Haeberlin and M. Real, "Arc detector for remote detection of dangerous
arcs on the DC side of PV plants," in 22nd European Photovoltaic Solar
Energy Conference, Milano, Italy, 2007, vol. 200.
[122] C. Strobl and P. Meckler, "Arc faults in photovoltaic systems," in 2010
Proceedings of the 56th IEEE Holm Conference on Electrical Contacts,
2010, pp. 1-7.

Bibliography 213
[123] Z. Wang and R. S. Balog, "Arc fault and flash detection in DC photovoltaic
arrays using wavelets," in Photovoltaic Specialists Conference (PVSC), 2013
IEEE 39th, 2013, pp. 1619-1624: IEEE.
[124] R. F. Ammerman, T. Gammon, P. K. Sen, and J. P. Nelson, "DC arc models
and incident energy calculations," in Petroleum and Chemical Industry
Conference, 2009. PCIC 2009. 2009 Record of Conference Papers-Industry
Applications Society 56th Annual, 2009, pp. 1-13: IEEE.
[125] X. Yao, J. Wang, and D. L. Schweickart, "Review and recent developments
in DC arc fault detection," in Power Modulator and High Voltage Conference
(IPMHVC), 2016 IEEE International, 2016, pp. 467-472: IEEE.
[126] A. Stokes and W. Oppenlander, "Electric arcs in open air," Journal of Physics
D: Applied Physics, vol. 24, no. 1, p. 26, 1991.
[127] S. Samantaray, "Ensemble decision trees for high impedance fault detection
in power distribution network," International Journal of Electrical Power &
Energy Systems, vol. 43, no. 1, pp. 1048-1055, 2012.
[128] M. Banejad and H. Ijadi, "High impedance fault detection: Discrete wavelet
transform and fuzzy function approximation," Journal of AI and Data
Mining, vol. 2, no. 2, pp. 149-158, 2014.
[129] N. Varma, D. Ram, and D. Anjaneyulu, "Development of fault detection
algorithm for high impedance faults in distribution network using
multiresolution analysis," International Journal of Engineering Research and
Technology, vol. 3, no. 9, pp. 573-576, 2014.
[130] G. Matheron, G. Matheron, G. Matheron, and G. Matheron, "Random sets
and integral geometry," 1975.
[131] J. Serra, Image analysis and mathematical morphology. Academic Press, Inc.,
1983.
[132] Y. Tingfang, L. Pei, Z. Xiangjun, and K. Li, "Application of adaptive
generalized morphological filter in disturbance identification for power
system signatures," in Power System Technology, 2006. PowerCon 2006.
International Conference on, 2006, pp. 1-7: IEEE.
[133] O. Sen and R. Zhen, "Application of improved mathematical morphology
method in the power quality monitoring," in Power System Technology, 2006.
PowerCon 2006. International Conference on, 2006, pp. 1-6: IEEE.
[134] Z. Lu, D. Turner, Q. Wu, J. Fitch, and S. Mann, "Morphological transform
for detection of power quality disturbances," in Power System Technology,
2004. PowerCon 2004. 2004 International Conference on, 2004, vol. 2, pp.
1644-1649: IEEE.
[135] G. Li, M. Zhou, Y. Luo, and Y. Ni, "Power quality disturbance detection
based on mathematical morphology and fractal technique," in Transmission
and Distribution Conference and Exhibition: Asia and Pacific, 2005
IEEE/PES, 2005, pp. 1-6: IEEE.
[136] P. M. Ramos, F. M. Janeiro, and A. C. Serra, "PQ monitoring system for real-
time detection and classification of disturbances in a single-phase power
system," IEEE Transactions on Instrumentation and Measurement, vol. 57,
no. 8, pp. 1725-1733, 2008.
[137] L.-a. Chen and P. Zhang, "Detection and protection of short circuit fault
based on morphology-wavelet," in Transmission and Distribution Conference
and Exhibition: Asia and Pacific, 2005 IEEE/PES, 2005, pp. 1-5: IEEE.

214 Bibliography
[138] Z. Lu, Q. Wu, and J. Fitch, "A morphological filter for estimation of power
system harmonics," in Power System Technology, 2006. PowerCon 2006.
International Conference on, 2006, pp. 1-5: IEEE.
[139] X. Lin, L. Zou, Q. Tian, H. Weng, and P. Liu, "A series multiresolution
morphological gradient-based criterion to identify CT saturation," IEEE
transactions on power delivery, vol. 21, no. 3, pp. 1169-1175, 2006.
[140] Z. Lu, J. S. Smith, and Q. H. Wu, "Morphological lifting scheme for current
transformer saturation detection and compensation," IEEE Transactions on
Circuits and Systems I: Regular Papers, vol. 55, no. 10, pp. 3349-3357, 2008.
[141] C. Zhang, X. Lin, Z. Chen, Z. Bo, and M. Redfern, "A novel mathematical
morphology based anti-CT saturation criterion for generator differential
protection," in Universities Power Engineering Conference, 2004. UPEC
2004. 39th International, 2004, vol. 2, pp. 763-767: IEEE.
[142] M. Jing, W. Zengping, X. Yan, and W. Jie, "A novel adaptive algorithm to
identify inrush using mathematical morphology," in Power Systems
Conference and Exposition, 2006. PSCE'06. 2006 IEEE PES, 2006, pp. 1020-
1028: IEEE.
[143] M. Jing, X. Yan, W. Zengping, and L. Haofang, "A novel adaptive scheme of
discrimination between internal faults and inrush currents of transformer
using mathematical morphology," in Power Engineering Society General
Meeting, 2006. IEEE, 2006, p. 7 pp.: IEEE.
[144] L. Zou, P. Liu, and Q. Zhao, "Applications of multiresolution morphological
analysis in ultra high speed protection of transmission line," IEE
Proceedings-Generation, Transmission and Distribution, vol. 153, no. 5, pp.
515-523, 2006.
[145] Q. Wu, J. Zhang, and D. Zhang, "Ultra-high-speed directional protection of
transmission lines using mathematical morphology," IEEE transactions on
power delivery, vol. 18, no. 4, pp. 1127-1133, 2003.
[146] M. Jing, W. Zengping, X. Yan, and M. Lei, "Single-ended transient positional
protection of transmission lines using mathematical morphology," in Power
Engineering Conference, 2005. IPEC 2005. The 7th International, 2005, pp.
1-603: IEEE.
[147] L. Zou, P. Liu, and Q. Zhao, "Mathematical morphology based phase
selection scheme in digital relaying," IEE Proceedings-Generation,
Transmission and Distribution, vol. 152, no. 2, pp. 157-163, 2005.
[148] X. Lin, Z. Bo, P. Liu, and M. Redfern, "A novel directional protective relay
using mathematic morphology," in Power Engineering Society General
Meeting, 2003, IEEE, 2003, vol. 3, pp. 1854-1861: IEEE.
[149] F. Y. Shih, Image processing and mathematical morphology: fundamentals
and applications. CRC press, 2009.
[150] Q.-H. Wu, Z. Lu, and T. Ji, Protective relaying of power systems using
mathematical morphology. Springer Science & Business Media, 2009.
[151] E. R. Dougherty and R. A. Lotufo, Hands-on morphological image
processing. SPIE press, 2003.
[152] S. Gautam and S. M. Brahma, "Application of mathematical morphology
based filters to detect a power swing," in Power and Energy Society General
Meeting, 2010 IEEE, 2010, pp. 1-6: IEEE.
[153] A. G. Phadke and J. S. Thorp, Synchronized phasor measurements and their
applications. Springer, 2017.

Bibliography 215
[154] M. Yang and S. Tan, "Research on an ultra-high-speed protection based on
multiresolution morphological gradient," in Power System Technology, 2006.
PowerCon 2006. International Conference on, 2006, pp. 1-5: IEEE.
[155] L. Zhang, Y. ping Lv, and H. Yin, "A multi-resolution morphology gradient
based non-communication protection scheme for transmission lines," in
Electric Utility Deregulation and Restructuring and Power Technologies,
2008. DRPT 2008. Third International Conference on, 2008, pp. 1608-1613:
IEEE.
[156] D. Zhang, Q. Li, J. Zhang, Q. Wu, and D. Turner, "Improving the accuracy of
single-ended transient fault locators using mathematical morphology," in
Power System Technology, 2002. Proceedings. PowerCon 2002.
International Conference on, 2002, vol. 2, pp. 788-792: IEEE.
[157] S. Gautam and S. M. Brahma, "Guidelines for selection of an optimal
structuring element for mathematical morphology based tools to detect power
system disturbances," in Power and Energy Society General Meeting, 2012
IEEE, 2012, pp. 1-6: IEEE.
[158] F. Y.-C. Shih and O. R. Mitchell, "Decomposition of gray-scale
morphological structuring elements," Pattern recognition, vol. 24, no. 3, pp.
195-203, 1991.
[159] H.-x. Zhang, J.-y. Li, M.-z. Wang, and H. Li, "Image edge detection based on
fusion of wavelet transform and mathematical morphology," in Computer
Science & Education (ICCSE), 2016 11th International Conference on, 2016,
pp. 981-984: IEEE.
[160] W. Zhang, D. Shi, and X. Yang, "An improved edge detection algorithm
based on mathematical morphology and directional wavelet transform," in
Image and Signal Processing (CISP), 2015 8th International Congress on,
2015, pp. 335-339: IEEE.
[161] S. M. Brahma, "Fault location in power distribution system with penetration
of distributed generation," IEEE transactions on power delivery, vol. 26, no.
3, pp. 1545-1553, 2011.
[162] S.-H. Hwang, H.-T. Chen, and C.-T. Chang, "An exponentially weighted
moving average method for identification and monitoring of stochastic
systems," Industrial & Engineering Chemistry Research, vol. 47, no. 21, pp.
8239-8249, 2008.
[163] S. Shome, S. Vadali, U. Datta, S. Sen, and A. Mukherjee, "Performance
evaluation of different averaging based filter designs using digital signal
processor and its synthesis on FPGA," International Journal of Signal
Processing, Image Processing and Pattern Recognition, vol. 5, no. 3, pp. 75-
92, 2012.
[164] L. Ljung, "System identification," in Signal analysis and prediction:
Springer, 1998, pp. 163-173.
[165] M. Sachdev and M. Nagpal, "A recursive least error squares algorithm for
power system relaying and measurement applications," IEEE Transactions on
Power Delivery, vol. 6, no. 3, pp. 1008-1015, 1991.
[166] F. Costa, D. Formiga, R. Ferreira, T. Sousa, and F. Costa, "A recursive least-
squares aided by pre-filtering for phasor-estimation in distance protection," in
PowerTech (POWERTECH), 2013 IEEE Grenoble, 2013, pp. 1-6: IEEE.
[167] T. M. MATLAB and Simscape Toolbox Release 2016a, Inc, Natick,
Massachusetts, USA.

216 Bibliography
[168] J. P. Ram, T. S. Babu, and N. Rajasekar, "A comprehensive review on solar
PV maximum power point tracking techniques," Renewable and Sustainable
Energy Reviews, vol. 67, pp. 826-847, 2017.
[169] K. Ishaque, Z. Salam, and H. Taheri, "Simple, fast and accurate two-diode
model for photovoltaic modules," Solar energy materials and solar cells, vol.
95, no. 2, pp. 586-594, 2011.
[170] P. Sanjeevikumar, G. Grandi, P. W. Wheeler, F. Blaabjerg, and J. Loncarski,
"A simple MPPT algorithm for novel PV power generation system by high
output voltage DC-DC boost converter," in Industrial Electronics (ISIE),
2015 IEEE 24th International Symposium on, 2015, pp. 214-220: IEEE.
[171] R. W. Erickson and D. Maksimovic, Fundamentals of power electronics.
Springer Science & Business Media, 2007.
[172] H. Ibrahim and N. Anani, "Variations of PV module parameters with
irradiance and temperature," Energy Procedia, vol. 134, pp. 276-285, 2017.
[173] S. Xiao and R. S. Balog, "An improved adaptive perturb & observe maximum
power point tracking technique," in Texas Power and Energy Conference
(TPEC), 2018 IEEE, 2018, pp. 1-6: IEEE.
[174] J. Chauhan, P. Chauhan, T. Maniar, and A. Joshi, "Comparison of MPPT
algorithms for DC-DC converters based photovoltaic systems," in Energy
Efficient Technologies for Sustainability (ICEETS), 2013 International
Conference on, 2013, pp. 476-481: IEEE.
[175] C. Hua, J. Lin, and C. Shen, "Implementation of a DSP-controlled
photovoltaic system with peak power tracking," IEEE Transactions on
Industrial Electronics, vol. 45, no. 1, pp. 99-107, 1998.
[176] K. Hussein, I. Muta, T. Hoshino, and M. Osakada, "Maximum photovoltaic
power tracking: an algorithm for rapidly changing atmospheric conditions,"
IEE Proceedings-Generation, Transmission and Distribution, vol. 142, no. 1,
pp. 59-64, 1995.
[177] A. K. Abdelsalam, A. M. Massoud, S. Ahmed, and P. N. Enjeti, "High-
performance adaptive perturb and observe MPPT technique for photovoltaic-
based microgrids," IEEE Transactions on Power Electronics, vol. 26, no. 4,
pp. 1010-1021, 2011.
[178] J. Ahmed and Z. Salam, "A modified P&O maximum power point tracking
method with reduced steady-state oscillation and improved tracking
efficiency," IEEE Transactions on Sustainable Energy, vol. 7, no. 4, pp.
1506-1515, 2016.
[179] O. Anaya-Lara, D. Campos-Gaona, E. Moreno-Goytia, and G. Adam,
Offshore wind energy generation: control, protection, and integration to
electrical systems. John Wiley & Sons, 2014.
[180] W. H. Kersting, "Radial distribution test feeders," in Power Engineering
Society Winter Meeting, 2001. IEEE, 2001, vol. 2, pp. 908-912: IEEE.
[181] A. Sedighi and M. Haghifam, "Simulation of high impedance ground fault In
electrical power distribution systems," in Power System Technology
(POWERCON), 2010 International Conference on, 2010, pp. 1-7: IEEE.
[182] B. M. Aucoin and R. H. Jones, "High impedance fault detection
implementation issues," IEEE Transactions on Power Delivery, vol. 11, no.
1, pp. 139-148, 1996.
[183] H. Sharaf, H. Zeineldin, and E. El-Saadany, "Protection coordination for
microgrids with grid-connected and islanded capabilities using

Bibliography 217
communication assisted dual setting directional overcurrent relays," IEEE
Trans. Smart Grid, vol. 9, pp. 143-151, 2018.
[184] V. Telukunta, J. Pradhan, A. Agrawal, M. Singh, and S. G. Srivani,
"Protection challenges under bulk penetration of renewable energy resources
in power systems: A review," CSEE Journal of Power and Energy Systems,
vol. 3, no. 4, pp. 365-379, 2017.
[185] D. M. Vilathgamuwa, P. C. Loh, and Y. Li, "Protection of microgrids during
utility voltage sags," IEEE Transactions on Industrial Electronics, vol. 53,
no. 5, pp. 1427-1436, 2006.
[186] M. Ebrahimpour, B. Vahidi, and S. H. Hosseinian, "A hybrid
superconducting fault current controller for DG networks and microgrids,"
IEEE Transactions on Applied Superconductivity, vol. 23, no. 5, pp.
5604306-5604306, 2013.
[187] P. Naveen and P. Jena, "A Review on Issues and Coordination Strategies for
Over Current Protection in Microgrid," in 2017 14th IEEE India Council
International Conference (INDICON), 2017, pp. 1-6: IEEE.
[188] M. Y. Shih, A. Conde, Z. Leonowicz, and L. Martirano, "An adaptive
overcurrent coordination scheme to improve relay sensitivity and overcome
drawbacks due to distributed generation in smart grids," IEEE Transactions
on Industry Applications, vol. 53, no. 6, pp. 5217-5228, 2017.
[189] E. Dehghanpour, H. K. Karegar, R. Kheirollahi, and T. Soleymani, "Optimal
coordination of directional overcurrent relays in microgrids by using cuckoo-
linear optimization algorithm and fault current limiter," IEEE Transactions
on Smart Grid, vol. 9, no. 2, pp. 1365-1375, 2018.
[190] H. M. Zeineldin, H. H. Sharaf, and E. El-Saadany, "Protection coordination
for microgrids with grid-connected and islanded capabilities using dual
setting directional overcurrent relays," IEEE Transactions on Smart Grid,
2016.
[191] W. J. Park, B. C. Sung, K.-B. Song, and J.-W. Park, "Parameter optimization
of SFCL with wind-turbine generation system based on its protective
coordination," IEEE Transactions on Applied Superconductivity, vol. 21, no.
3, p. 2153, 2011.
[192] D. K. Ibrahim, E. E. D. A. El Zahab, and S. A. E. A. Mostafa, "New
coordination approach to minimize the number of re-adjusted relays when
adding DGs in interconnected power systems with a minimum value of fault
current limiter," International Journal of Electrical Power & Energy Systems,
vol. 85, pp. 32-41, 2017.
[193] V. R. Pandi, H. Zeineldin, and W. Xiao, "Determining optimal location and
size of distributed generation resources considering harmonic and protection
coordination limits," IEEE transactions on power systems, vol. 28, no. 2, pp.
1245-1254, 2013.
[194] H. Zhan et al., "Relay protection coordination integrated optimal placement
and sizing of distributed generation sources in distribution networks," IEEE
Transactions on Smart Grid, vol. 7, no. 1, pp. 55-65, 2016.
[195] P. Mahat, Z. Chen, B. Bak-Jensen, and C. L. Bak, "A Simple Adaptive
Overcurrent Protection of Distribution Systems With Distributed
Generation," IEEE Trans. Smart Grid, vol. 2, no. 3, pp. 428-437, 2011.
[196] J. Ma, X. Wang, Y. Zhang, Q. Yang, and A. Phadke, "A novel adaptive
current protection scheme for distribution systems with distributed

218 Bibliography
generation," International Journal of Electrical Power & Energy Systems,
vol. 43, no. 1, pp. 1460-1466, 2012.
[197] M. Ojaghi, Z. Sudi, and J. Faiz, "Implementation of full adaptive technique to
optimal coordination of overcurrent relays," IEEE Transactions on Power
Delivery, vol. 28, no. 1, pp. 235-244, 2013.
[198] J.-D. Park and J. Candelaria, "Fault detection and isolation in low-voltage
DC-bus microgrid system," IEEE transactions on power delivery, vol. 28, no.
2, pp. 779-787, 2013.
[199] L. ZHANG, T. Nengling, W. HUANG, L. Jian, and W. Yanhong, "A review
on protection of DC microgrids," Journal of Modern Power Systems and
Clean Energy, pp. 1-15, 2018.
[200] N. Bayati, A. Hajizadeh, and M. Soltani, "Protection in DC microgrids: a
comparative review," IET Smart Grid, vol. 1, no. 3, pp. 66-75, 2018.
[201] D. Salomonsson, L. Soder, and A. Sannino, "Protection of low-voltage DC
microgrids," IEEE Transactions on Power Delivery, vol. 24, no. 3, pp. 1045-
1053, 2009.
[202] D. M. Bui, S.-L. Chen, C.-H. Wu, K.-Y. Lien, C.-H. Huang, and K.-K. Jen,
"Review on protection coordination strategies and development of an
effective protection coordination system for DC microgrid," in Power and
Energy Engineering Conference (APPEEC), 2014 IEEE PES Asia-Pacific,
2014, pp. 1-10: IEEE.
[203] S. D. Fletcher, P. J. Norman, S. J. Galloway, P. Crolla, and G. M. Burt,
"Optimizing the roles of unit and non-unit protection methods within DC
microgrids," IEEE transactions on Smart Grid, vol. 3, no. 4, pp. 2079-2087,
2012.
[204] B. Devarajan, "Modeling of a DC fuse for protection of semiconductor
devices using PSCAD/EMTDC," 2010.
[205] N. Sadiq and T. Noor, "Selecting fuses: simple procedures to get the right
overcurrent protection for DC–DC converters," Power Electronics
Technology, 2010.
[206] J. Candelaria and J.-D. Park, "VSC-HVDC system protection: A review of
current methods," in Power Systems Conference and Exposition (PSCE),
2011 IEEE/PES, 2011, pp. 1-7: IEEE.
[207] C. M. Franck, "HVDC circuit breakers: A review identifying future research
needs," IEEE Transactions on Power Delivery, vol. 26, no. 2, pp. 998-1007,
2011.
[208] C. Meyer, S. Schroder, and R. W. De Doncker, "Solid-state circuit breakers
and current limiters for medium-voltage systems having distributed power
systems," IEEE transactions on power electronics, vol. 19, no. 5, pp. 1333-
1340, 2004.
[209] D. Lawes, L. Ran, and Z. Xu, "Design of a solid-state DC circuit breaker for
light rail transit power supply network," in Energy Conversion Congress and
Exposition (ECCE), 2014 IEEE, 2014, pp. 350-357: IEEE.
[210] Y. Zhang and Y. C. Liang, "Over-current protection scheme for SiC power
MOSFET DC circuit breaker," in 2014 IEEE Energy Conversion Congress
and Exposition (ECCE), 2014, pp. 1967-1971: IEEE.
[211] M. E. Baran and N. R. Mahajan, "Overcurrent protection on voltage-source-
converter-based multiterminal DC distribution systems," IEEE transactions
on power delivery, vol. 22, no. 1, pp. 406-412, 2007.

Bibliography 219
[212] R. M. Cuzner and G. Venkataramanan, "The status of DC micro-grid
protection," in Industry Applications Society Annual Meeting, 2008. IAS'08.
IEEE, 2008, pp. 1-8: IEEE.
[213] L. Tang and B. Ooi, "Locating and Isolating DC Faults in Multi-Terminal DC
Systems," IEEE Transactions on Power Delivery, vol. 22, no. 3, pp. 1877-
1884, 2007.
[214] M. Monadi, C. Koch-Ciobotaru, A. Luna, J. I. Candela, and P. Rodriguez, "A
protection strategy for fault detection and location for multi-terminal MVDC
distribution systems with renewable energy systems," in 2014 International
Conference on Renewable Energy Research and Application (ICRERA),
2014, pp. 496-501.
[215] J. Park, J. Candelaria, L. Ma, and K. Dunn, "DC Ring-Bus Microgrid Fault
Protection and Identification of Fault Location," IEEE Transactions on
Power Delivery, vol. 28, no. 4, pp. 2574-2584, 2013.
[216] M. Farhadi and O. A. Mohammed, "Event-Based Protection Scheme for a
Multiterminal Hybrid DC Power System," IEEE Transactions on Smart Grid,
vol. 6, no. 4, pp. 1658-1669, 2015.
[217] M. Farhadi and O. A. Mohammed, "A New Protection Scheme for Multi-Bus
DC Power Systems Using an Event Classification Approach," IEEE
Transactions on Industry Applications, vol. 52, no. 4, pp. 2834-2842, 2016.
[218] G. Venkataramanan and C. Marnay, "A larger role for microgrids," IEEE
Power and Energy Magazine, vol. 6, no. 3, pp. 78-82, 2008.
[219] V. K. Sood, D. Fischer, J. M. Eklund, and T. Brown, "Developing a
communication infrastructure for the Smart Grid," in 2009 IEEE Electrical
Power & Energy Conference (EPEC), 2009, pp. 1-7.





















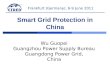

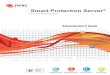

![Smart FET Protection Features.ppt [Read-Only]](https://img.pdfslide.us/doc/110x75/61bd28c761276e740b0ff83a/smart-fet-protection-read-only.jpg)


