Embed Size (px)
Citation preview

J. Non-Newtonian Fluid Mech. 127 (2005) 41–49
Size reduction methods for the implicit time-dependentsimulation of micro–macro viscoelastic flow problems
Jorge Ramırez∗, Manuel Laso
Dep. de Ingenier´ı a Quı mica Industrial y del Medio Ambiente, Escuela T´ecnica Superior de Ingenieros Industriales,Universidad Politecnica de Madrid, Jos´e Gutierrez Abascal 2, 28006 Madrid, Spain
Received 30 November 2004; received in revised form 12 February 2005; accepted 18 February 2005
Abstract
Traditionally, micro–macro simulations have been performed using simple explicit time-marching algorithms, which lack the desirablestability of implicit methods. In this study, a fully implicit time integration scheme is presented and implemented for the first time for thesolution of time-dependent complex flows using the Brownian Configuration Fields approach. Special techniques need to be applied to dealwith the very large size of the resulting linear systems. A novel size-reduction scheme is used, allowing an independent treatment for eachmolecular field and suited to parallel hardware architecture. To illustrate the method, a selected number of applications using linear springc ent betweent©
K
1
flcCotfaonafepcc
l
ovedinge
eth-tion,f theasticen
ratehane ofas aoredeacules
pe-that
por-
0d
hains are presented and the results are compared with their corresponding closed form constitutive equation. The excellent agreemhe results demonstrates the feasibility of the proposed approach.
2005 Elsevier B.V. All rights reserved.
eywords:CONNFFESSIT; Brownian Fields; Finite elements; Non-Newtonian; SUPG; DEVSS-G; Implicit
. Introduction
For the numerical simulation of complex viscoelasticows, two different possibilities are available: a purelyontinuum mechanical approach and the micro–macro orONNFFESSIT[1] methods, which are the combinationf continuum-mechanical discretization techniques for
he conservation equations and kinetic theory models[2]or polymer dynamics. Although they are not competitivegainst the continuum-mechanical approach in termsf computational efficiency, micro–macro methods areecessary when a closed form constitutive equation is notvailable. Closure approximations are most of the timesavorable because they offer huge savings in computationalffort, at the price of missing some aspects of the underlyinghysics. On the other hand, micro–macro methods conformorrectly to the physics of the molecular model, but theiromputational cost is higher and the results typically show
∗ Corresponding author.E-mail addresses:[email protected] (J. Ramırez),
[email protected] (M. Laso).
statistical fluctuations. However, these methods have prto be very useful in a wide range of problems includdifferent molecular models[3,4], and geometries like fresurfaces[5,6] or three-dimensional conditions[7]. Addition-ally, improvements based on the original idea of[1] continueto appear periodically in the literature[8–11] extending thescope of application and the efficiency of micro–macro mods. An alternative approach to the micro–macro concepthat can also be used in complex flows, is the solution oFokker–Planck equation instead of the equivalent StochDifferential Equation[12]. Recently, this approach has beimproved considerably with a very efficient and accumethod[13] that in many situations can perform better tCONNFFESSIT. The only limit of that method is the casmolecular models for which the configurational space hhigh number of dimensions. In such context, it is still mefficient and useful to implement the micro–macro ibased on the particular realization of ensembles of moleand the solution of stochastic differential equations.
An important feature of complex viscoelastic flows, scially those appearing in most industrial processes, isthey are time dependent in nature. It is increasingly im
377-0257/$ – see front matter © 2005 Elsevier B.V. All rights reserved.
oi:10.1016/j.jnnfm.2005.02.002
42 J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49
tant to have efficient, accurate and robust time-dependentmethods to simulate industrial type flows. The stability ofthe numerical scheme is another aspect that must be takencarefully into account. It is well known that implicit time de-pendent discretizations, apart from being more stable thanexplicit schemes, frequently allow to get reliable results at anextended region in the parameter space. On the other hand,implicit time integration is more demanding in terms of thecomputer resources required.
Previously, micro–macro calculations have been donealmost exclusively by means of a time marching explicit,uncoupled numerical scheme, lacking the desirable stabilityof implicit methods. In the numerical solution of time de-pendent partial differential equations that include advectionterms, an explicit discretization in time must fulfill some kindof Courant–Friedrich–Lewy (CFL)-like condition to ensurethe stability of the numerical scheme. This imposes a verysevere restriction on the size step allowed in the calculation,especially with increasing mesh refinement. However, a fullyimplicit time discretization is unconditionally stable withrespect to the time step size, and the latter is restricted only bythe physics of the problem or the accuracy requirements. Re-cently, Somasi and Khomami[14] developed a self-consistentsemi-implicit algorithm based on theθ-method and a Picard-like iteration to attain full convergence at each time step.Their method has similar properties as a fully impliciti ncy,b e oft f theθ
yt omt sizer thed enta thodw for as icalt
deasp gtt ticalt costo ablyh t bei ltingl ndt ofc news dt cularm ticals oft ; thec ussed
as well. Finally, in Section4, a summary of the results andplans for future work are presented.
2. Model and methods
2.1. Governing equations
The equations describing the isothermal flow of an in-compressible viscoelastic fluid with no body forces, are thestandard momentum and mass conservation equations[16];in non-dimensional form, these equations read:
Re∂u∂t
+ Re(u · ∇)u − α∇2u + ∇p − ∇ · τ = 0
∇ · u = 0(1)
whereu is the fluid velocity,p the hydrostatic pressure andτ isthe extra stress tensor. Variables are made non-dimensionalby picking a characteristic velocityV and a characteristiclengthL from the particular problem at hand, and perform-ing the following substitutions: for the velocity (u∗ = V u),length (r∗ = Lr), time (t∗ = tL/V ), pressure (p∗ = pηV/L)and extra stress (τ∗ = τηV/L). In these expressions, let-ters labelled with * denote dimensional variables, whereasunlabelled letters indicate their non-dimensional counter-p fs snd
ustb tivee tresst theC ics ofa ctiono sticd tione ec ularm tratet tionsf bellm illbr
ee thee
mplementation in terms of accuracy and self-consisteut it still misses the desired stability, concerning the sizhe time step, due to the explicit sub-steps that are part o-method.
In our previous paper[15], we introduced a practical wao treat the implicit time integration of problems arising frhe micro–macro concept. Our method is based on theeduction of the linear system of equations resulting fromiscretization of the problem, using a Schur’s complempproach. In that work, the theoretical basis of the meas outlined, and some results and numerical analysisimple one-dimensional problem, for which a fully analytreatment was possible, were presented.
In the present article, we implement and extend the iresented in[15] for the simulation of complex flows usin
he Brownian Configuration Fields (BCF)[8] approach. Inhe present, more general, implementation, the analyreatment of the problem is not practical because thef construction of the Schur complement is unacceptigh. Therefore, alternative special techniques mus
mplemented to deal with the very large size of the resuinear system. In Section2 the governing equations ahe numerical scheme for the implicit Brownian Fieldsomplex flows are presented, along with the proposedize reduction method. In Section3, the method is applieo some benchmark tests using bead-spring moleodels and the results are compared with the analy
olutions, when available, or the numerical solutionshe corresponding macroscopic constitutive equationsonvergence and performance of the method are disc
arts;η is the total viscosity of the fluid,α is the ratio oolvent viscosityηs to total viscosityη, and the Reynoldumber is defined asRe = ρVL/η, with ρ being the fluidensity.
This set of partial differential equations (PDE) me supplemented by a differential or integral constituquation (CE), which relates the macroscopic extra s
o the history of the flow. In the micro–macro approach,E is replaced by (i) an equation expressing the dynammesoscopic kinetic theory molecular model as a fun
f the macroscopic velocity field (typically a stochaifferential equation, SDE), and (ii) another equaxpressing the extra stress tensorτ as a function of thonformation of the molecules as given by the molecodel used (typically an ensemble average). To illus
his concept, we introduce the non-dimensional equaor the micro–macro formulation of the Hookean dumbolecular model[2] (due to its simplicity and because it we used later in this work), using the Brownian Fields[8]epresentation:
d Qi +(
u · ∇ Qi − ∇uT · Qi + 1
2WeQi
)dt
−√
1We
d Wi = 0
τ − 1 − α
We(〈 Q Q〉 − δ) = 0
(2)
In Eq. (2), the connector vectorsQi, representing thnd-to-end vector of the molecules, is rescaled withquilibrium average connector length
√kBT/H , wherekB is

J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49 43
Boltzmann’s constant,T the temperature andH is the constantof the connector spring. The relaxation time of the dumbbellsis λ = ζ/4H , ζ being the friction coefficient of the beads ofthe dumbbell, and the non-dimensional Weissenberg number,which measures the degree of elasticity of the flow, is de-fined asWe = λV/L. Wi is a standard vector of independentWiener processes andδ is the identity tensor. The angle brack-ets 〈 〉 represent an ensemble average over a population ofN representative dumbbells (i = 1, . . . , N). To obtain betterstatistics, a largeN is required; typically, in the case of BCF,N is of the order of 103. Dumbbell models are appropriate torepresent solutions that are sufficiently diluted such that theindividual molecules do not interact with one another. It canbe easily shown[17] that Hookean dumbbells correspond tothe molecular description of an Oldroyd-B viscoelastic fluid.
2.2. Numerical scheme
The set of Eqs.(1) and (2)are discretized using a mixedDEVSS-G/SUPG finite element method[18,19]. To increasethe statistical efficiency of the simulation, we reduced thevariance of the stress with the help of the control variatesmethod [20]. More precisely, an ensemble of Hookeandumbbells starting from the same initial conditions as theBCF and evolving under quiescent conditions, is used toapproximate the equilibrium non-dimensional conformationtT singt umc mam thiss andt Thep(
−((
(
Q
whereG = ∇u is the discrete finite element interpolant ofthe velocity gradient andh is a measure of the size of eachfinite element along the direction of the flow. (x, y) and(x, y)Γ are the standard scalar products ofx and y in thedomainΩ and on the boundaryΓ , respectively, andb is thetraction vector on the boundaryΓ . All terms are evaluatedat the current time step (n + 1), except those labelledwith n, which are evaluated at the previous time step. Theapproximating functional spaces are continuous biquadraticpolynomials (Q2) for the velocity, and continuous bilinearpolynomials (Q1) for the pressure, gradient of velocity,stress tensor and connector spring.
After discretization, the fully implicit formulation leadsto a system of nonlinear algebraic equations. We selectedthe Newton–Raphson (NR) method for the solution of theproblem, due to its superior convergence rate. It is impor-tant to know that, for typical micro–macro flow problemsand medium mesh refinement (for instance, we can con-sider some hundreds of finite elements and some thousandsof BCF), the number of degrees of freedom can easily getvery large (on the order of millions). Hence, we have a non-linear system of equations with some millions of unknowns.In the NR scheme, the non-linear system of equations is lin-earized and the resulting algebraic systemJδx = b, whereJ is the Jacobian,δx is the vector of corrections of the un-knowns andb is the vector of residuals, has to be solveds lled.I ionso heys ma-t tionsb
δ
b
ensor〈 Q Q〉0 which, at equilibrium, must be equal toδ.he temporal discretization of the equations is done u
he implicit (backward) Euler method for the momentonservation equation, and a fully implicit Euler–Maruyaethod for the stochastic differential equations. Using
cheme, both the order of convergence of the PDEhe weak order of convergence of the SDE coincide.roposed numerical scheme reads:
Re
tu + Re (u · ∇)u + ∇u − pδ − (1 − α)G+ τ,∇v
)
= (b,∇v)Γ (3)
(∇ · u, q) = 0 (4)
1 − α)(G− ∇u,E) = 0 (5)
τ − 1 − α
We
1
N
N∑i=1
( QiQi − Q0
iQ0i ), σ
)= 0 (6)
Qi + u · ∇ Qit −GT · Qit + t
2WeQi, R
+ h
|u| (u · ∇ R)
)=(
Qni +
√1
We Wi, R + h
|u| (u · ∇ R)
)
(7)
0i + t
2WeQ0i = Q0,n
i +√
1
We Wi (8)
everal times at each time step until convergence is fulfif the equations and unknowns of the discretized versf J, δx andb are ordered according to the variables, thow the following block structure (the lines inside therices and vectors are drawn to assist in the descripelow):
(9)
xT = (δxu δxp | δxG δxτ | δx Q1δx Q2
· · · δx Qi· · · δx QN
)
(10)
T = (bu bp | bG bτ | b Q1b Q2
· · · b Qi· · · b QN
) (11)

44 J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49
It can be noted that the Jacobian has a general arrowheadblock structure. Each non-empty sub-block of the Jacobianis at the same time a sparse matrix with the sparsity patterngiven by the underlying connectivity of the finite elementmesh. Also, due to the fact that molecular fields do not interactwith each other, as is the case in many molecular modelsfrom the kinetic theory, the sub-blockJ Q Q (lower-right partof the Jacobian, also the largest part of the Jacobian due to thelarge number of BCF) has an advantageous block diagonalstructure.
2.3. Size reduction method
Due to the large size of the resulting linear system thatneeds to be solved at each loop of the NR method, it is im-practical, even using iterative methods, to solve the completesystem of equations. Instead, we recur to a size reduction al-gorithm that takes advantage of the sparse block structure ofthe Jacobian in Eq.(9). The idea is to reduce the problemto the size of a typical macroscopic CFD or Navier–Stokesproblem (upper-left part of the Jacobian), for which a largenumber of efficient numerical techniques are available. We dosuch reduction by performing a block Gauss elimination stepof all variables exceptu andp. The block elimination proce-dure is equivalent to the following substitution of variables,operating at the block level:
A od-i h thef
w odi-fib
J
b
s is
approximately equal to the cost of solving one step of thesame micro–macro problem if it is put in an explicit, uncou-pled way. This needs to be done at the beginning of eachNR loop. However, the construction of the modified blockof the JacobianJ∗
uu would need the inversion ofN + 2 ma-trices, which is completely out of question due to the mem-ory and CPU requirements of such operation. Instead, wepropose to solve the modified Navier–Stokes problem by us-ing a preconditioned GMRES method. This iterative methodis based on matrix–vector multiplications, and it can be al-tered so it can use the modified version of the Jacobian ateach iteration. To perform a matrix–vector multiplicationusing the modified Jacobian blockJ∗
uu, we need to solveN + 2 linear systems (and, eventually, to assemble the 4N
sub-blocksJτ Qi, J Qiu, J QiG
and J QiQi
if the memory islimited).
In order to reduce the numerical work, it is essential toreduce the number of iterations of the solver. With iterativesolvers like GMRES, this is typically accomplished by theapplication of an appropriate preconditioner. In the presentproblem, we have the additional complication that the ma-trix that we want to solve is never available in memory, andit is hence very difficult to estimate a good preconditioner.In our previous work[15], we showed that, for a simpleone-dimensional case, the condition of the Jacobian corre-sponding to the purely macroscopic part of the problem isn sum-i ndt pre-c kess ithmi beenp klyd nd ont
ingt
(( to
Srod-
(
S RESm -t atedv -v r NRl arseb e in-t si per-m aree
δxG = J−1GG(bG − JGuδxu)
δxτ = J−1ττ
(N∑i=1
Jτ Qiδx Qi
)
δx Qi= J−1
QiQi
(b Qi− J Qiuδxu − J QiG
δxG)
(12)
fter the substitutions are performed, we are left with a mfied Navier–Stokes problem that can be expressed witollowing simplified notation:(J∗
uu JupJpu 0
)(δxuδxp
)=(b∗
ubp
)(13)
here only the sub-blocks labelled with an asterisk are med from those in the original Jacobian of Eq.9. The modifiedlocks have the following expressions:
∗uu = Juu − JuGJ−1
GGJGu + JuτJ−1ττ
N∑i=1
Jτ QiJ−1
QiQi
(J Qiu
−J QiGJ−1GGJGu) (14)
∗u = bu − JuGJ−1
GGbG − JuτJ−1ττ
×[bτ +
N∑i=1
Jτ QiJ−1
QiQi
(J QiGJ−1GGbG − b Qi
)
](15)
To build the modified block of the residualb∗u we need to
olve N + 2 linear systems. The cost of this operation
ot deteriorated after the size reduction procedure. Asng that this property of the method still holds in two ahree-dimensional problems, we decided to rely on aonditioner that only considers the original Navier–Stoub-blocks of the Jacobian, before any reduction algors applied. We selected a block preconditioner that hasroposed recently[21] whose convergence is only weaependent on the Reynolds number and does not depe
he mesh size.The proposed solution algorithm comprises the follow
hree steps, that must be performed at each NR loop:
1) Preparation of the modified residual blockb∗u.
2) Solution of the modified Navier–Stokes problemobtain δxu and δxp, using a preconditioned GMREmethod. The solver applies a special matrix–vector puct that considers the modified Jacobian sub-blockJ∗
uu.3) Back substitution to obtainδxG, δxτ andδx Qi
.
teps (1) and (3), as well as each iteration of the GMethod in step (2), implies the solution ofN + 2 linear sys
ems. At the end of each NR loop, we are left with the updalues of the fieldsu, p,G, τ and Qi. If the solution has conerged, we move on to the next time step; if not, anotheoop is performed. It must be noted that, due to the splock structure of the part of the Jacobian referring to th
eraction between microscopic variables,J Q Q, all operationnvolving BCF can be done on a per field basis. This
its to adapt the algorithm very easily to a parallel hardwnvironment.

J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49 45
Fig. 1. Channel domain where tests and applications are solved.
3. Results and discussion
To test our new method, we solved a selected numberof benchmark problems, most of them having analytical so-lution. The problems were chosen carefully to address theissues of convergence, efficiency or computational cost, andapplicability of the proposed algorithm. In the following sub-sections, the results of applications of the method to problemsof increasing difficulty are presented.
3.1. Numerical test: startup of 2D Couette flow ofHookean dumbbells
First, we examined the performance of the method in atypical benchmark case: the start up of two-dimensional planecreeping Couette flow of a solution of Hookean dumbbells(domain and boundary conditions schematically depicted inFig. 1). There is no slip at the plates and periodic boundaryconditions are applied to the fieldsu, G, τ and each BCFQi. The dimensionless length of the flow channel isD = 2π.Unless otherwise specified, the conditions of the simulationswere the following: mesh of 10× 40 finite elements,We = 1,t = 0.1 andα = 0.5.
We checked the convergence of the method for differentBCF ensemble sizes. InFig. 2, the transient growth of thes hes ed as√
adys erage.W rentt nce1
go-r thef
• (the0
ult,non-
• isof
Fig. 2. Start up of shear stressτxy in plane creeping Couette flow (We =1, α = 0.5, t = 0.1). The inset shows the error for three different BCFensemble sizes, along with the fit to a function proportional to 1/
√N.
the modified Stokes problem).1 The number of GMRESiterations does not depend onN, mesh refinement,t orWe.
The last two points mean that we have an explicit time in-tegration method which is linear in the number of moleculesor BCF (something that is evident in the explicit case butis not clear in the implicit, non-linear, coupled case), andwhose computational cost is only twice the cost of the ex-plicit, uncoupled algorithm. The explanation of this behavioris simple: the flow in this particular case is homogeneous inspace, and the conformational state of the molecules does notaffect the value of the hydrodynamic variablesu andp. Thesolver converges very easily because, after the first time step,the hydrodynamic fields essentially do not change.
3.2. Application 1: startup of plane pressure flow ofHookean dumbbells
The same geometry (seeFig. 1) was used to solve thestart up of plane pressure flow. Parabolic velocity profileswere imposed at the inflow and outflow boundaries, no slipboundary conditions were applied at the upper plate, andG,τ and Qi were subjected to periodic boundary conditions. Inthis particular problem, the Weissenberg number is definedasWe = λ〈V 〉/L, where〈V 〉 is the average velocity over thew eldr fluc-t bles),t tressa veralrt graph
lem,a (1000B
hear stress for differentN is presented. In the insert of tame figure, it can be observed that the error, computσ/N (σ being the variance of the solution at the ste
tate), has the expected convergence for a statistical ave also checked the convergence of the error for diffe
ime step sizest. The expected weak order of convergein the value of the stress was verified.Regarding the computational cost of the implicit al
ithm, compared to the explicit version, we observedollowing:
Only two NR loops were needed at each time stepcondition for convergence was set to a maximum of 1−6
in any single value of the residual vectorb or vector ofcorrectionsδx). This was somehow an expected resbecause we are solving a problem that is only weaklylinear.After the initial time step, only one GMRES iterationneeded to converge (10−10 tolerance in the residual
idth of the channel. Note that, although the velocity fiemains homogeneous at all times (except for the typicaluations arising from the averages of the stochastic variahe pressure field depends on the value of the extra snd is, thus, not homogeneous in space and time. Seuns were performed for different values oft andN, andhe same correct convergence as in the previous para
1 To have an idea of the computational requirements of this probround 200 s are needed for each preconditioned GMRES iterationCF) on an Intel® Xeon™ CPU at 2.80 GHz.
46 J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49
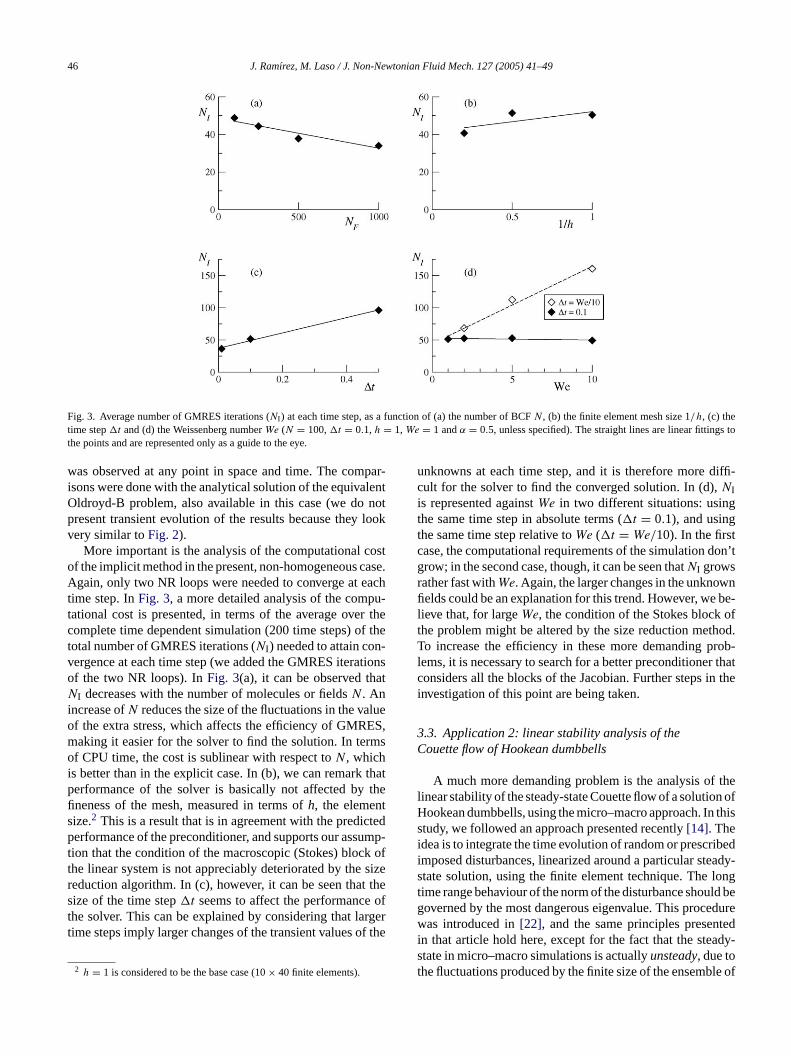
Fig. 3. Average number of GMRES iterations (NI ) at each time step, as a function of (a) the number of BCFN, (b) the finite element mesh size 1/h, (c) thetime stept and (d) the Weissenberg numberWe (N = 100,t = 0.1, h = 1,We = 1 andα = 0.5, unless specified). The straight lines are linear fittings tothe points and are represented only as a guide to the eye.
was observed at any point in space and time. The compar-isons were done with the analytical solution of the equivalentOldroyd-B problem, also available in this case (we do notpresent transient evolution of the results because they lookvery similar toFig. 2).
More important is the analysis of the computational costof the implicit method in the present, non-homogeneous case.Again, only two NR loops were needed to converge at eachtime step. InFig. 3, a more detailed analysis of the compu-tational cost is presented, in terms of the average over thecomplete time dependent simulation (200 time steps) of thetotal number of GMRES iterations (NI ) needed to attain con-vergence at each time step (we added the GMRES iterationsof the two NR loops). InFig. 3(a), it can be observed thatNI decreases with the number of molecules or fieldsN. Anincrease ofN reduces the size of the fluctuations in the valueof the extra stress, which affects the efficiency of GMRES,making it easier for the solver to find the solution. In termsof CPU time, the cost is sublinear with respect toN, whichis better than in the explicit case. In (b), we can remark thatperformance of the solver is basically not affected by thefineness of the mesh, measured in terms ofh, the elementsize.2 This is a result that is in agreement with the predictedperformance of the preconditioner, and supports our assump-tion that the condition of the macroscopic (Stokes) block ofthe linear system is not appreciably deteriorated by the sizer t thes oft rgert f the
unknowns at each time step, and it is therefore more diffi-cult for the solver to find the converged solution. In (d),NIis represented againstWe in two different situations: usingthe same time step in absolute terms (t = 0.1), and usingthe same time step relative toWe (t = We/10). In the firstcase, the computational requirements of the simulation don’tgrow; in the second case, though, it can be seen thatNI growsrather fast withWe. Again, the larger changes in the unknownfields could be an explanation for this trend. However, we be-lieve that, for largeWe, the condition of the Stokes block ofthe problem might be altered by the size reduction method.To increase the efficiency in these more demanding prob-lems, it is necessary to search for a better preconditioner thatconsiders all the blocks of the Jacobian. Further steps in theinvestigation of this point are being taken.
3.3. Application 2: linear stability analysis of theCouette flow of Hookean dumbbells
A much more demanding problem is the analysis of thelinear stability of the steady-state Couette flow of a solution ofHookean dumbbells, using the micro–macro approach. In thisstudy, we followed an approach presented recently[14]. Theidea is to integrate the time evolution of random or prescribedimposed disturbances, linearized around a particular steady-s longt ld beg edurew tedi ady-st le of
eduction algorithm. In (c), however, it can be seen thaize of the time stept seems to affect the performancehe solver. This can be explained by considering that laime steps imply larger changes of the transient values o
2 h = 1 is considered to be the base case (10× 40 finite elements).
tate solution, using the finite element technique. Theime range behaviour of the norm of the disturbance shouoverned by the most dangerous eigenvalue. This procas introduced in[22], and the same principles presen
n that article hold here, except for the fact that the stetate in micro–macro simulations is actuallyunsteady, due tohe fluctuations produced by the finite size of the ensemb

J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49 47
molecules. In this case, both the steady-state and perturbationevolve in time and must be integrated.
The governing Eqs.(1) and (2), in the caseRe = 0 andwith the additional DEVSS-G equation, are linearized aroundthe steady state. For the sake of completeness, we include herethe set of evolution equations for the perturbation fields:
−∇2u′ + ∇p′ + (1 − α)∇ ·G′ − ∇ · τ′ = 0
∇ · u′ = 0
(1 − α)(G′ − ∇u′) = 0
τ′ − 1 − α
We
1
N
N∑i=1
( Q′iQi + Qi
Q′i) = 0
Q′i + u′ · ∇ Qit + u · ∇ Q′
it −G′T · Qit −GT · Q′it
+ t2We
Q′i = Q′n
i
(16)
The same discretization techniques described in Section2.2are applied here. The equations for plane creeping Couetteflow of Hookean dumbbells are evolved until a steady-stateis attained (a simulation length of around 10 times the re-laxation time of the dumbbells is enough for that purpose).At that point, an initial, periodic and random, perturbation isprescribed for each of the perturbed BCFQ′
i. Then, both theb time,a blei
P
w ro ro
pre-v ni olec-u wea orks.T it orsm ccu-r canh t thev ions,w
is-t anal-y lls isp uettefl longt realp orma
Fig. 4. Evolution of the normalized norm of the disturbance of the stress forHookean dumbbells atWe = 1, 2, 5 and 10 with 2000 trajectories.
being the sought eigenvalue. InTable 1, the eigenvalues com-puted fromFig. 4are presented, along with the results froma previous micro–macro semi-implicit algorithm, and fromthe solution of the generalized eigenvalue problem. The re-sults are in good agreement with previously published results.If Fig. 4 is compared with Fig. 7 of[14], it can be observedthat, although both result in similar long time dynamics (sameslope of the logarithmic decay), the short time dynamics seemto differ. Apart from the influence of the non-normal interac-tions of the eigenmodes on the dynamics of the system, webelieve that the discrepancies at short times may be due toactual deviations in the dynamics of the perturbations of themolecules. In the previous semi-implicit approach, the initialperturbations of the dumbbells originated as a reaction to aprescribed perturbation of the velocity field. In the presentfully implicit work, the perturbation must be prescribed di-rectly at the molecular level, and therefore the evolution ofthe norms are different. We believe that the present approachis more realistic, although this is not reflected in a higher ac-curacy in the eigenvalues ofTable 1. The lower accuracy ofour results is due to the significant larger value of the timestep.
3.4. Application 3: startup of creeping plane Couetteflow of Rouse chains
-l highn and
TM
W )
1
C esultsf
ase flow and the perturbed variables are integrated innd the growth or decay of the disturbance for any variav
s monitored using the following norm:
v(t) =√√√√ Nn∑
i=1
(v2i,1 + v2
i,2 + · · · v2i,m) (17)
herevi,j is thejth component of the variablev (scalar, vector tensor) evaluated at theith node, andNn is the total numbef nodes of the discretization.
The main difference between this approach and theious one[14] is that, due to the fully implicit discretizatio
n time, we need to prescribe the disturbance in the mlar variables and not in the velocity field. Moreover,re allowed to use larger time steps than in previous whis is a clear advantage of implicit methods over explicemi-implicit algorithms, specially for largeWe and very fineeshes. Although the size of the time step affects the a
acy of the solution, a calculation using large time stepselp to reach faster the regime where we want to extracalue of the most dangerous eigenvalues. In our simulate always used a time stept = We/10.In Fig. 4, the evolution of the normalized norm of the d
urbance of the extra stress tensor in the linear stabilitysis of creeping plane Couette flow of Hookean dumbberesented. As expected for the unconditionally stable Coow, the stress norm shows an exponential decay. Theime behavior of this norm can be used to evaluate theart of the most dangerous eigenvalue, by fitting the nt long times to a function of the formf (t) = exp(at + b), a
As we mentioned in Section1, in the case of molecuar models for which the configurational space has aumber of dimensions, we believe it is still necessary
able 1ost dangerous eigenvalues for Hookean dumbbells
e Hookean A Hookean B OLD-B(GEVP
1.0 −0.72 −0.85 −1.02 to−0.982.0 −0.37 −0.46 −0.52 to−0.485.0 −0.15 −0.17 −0.22 to−0.180.0 −0.061 −0.079 −0.073
olumn A shows the results from the present work, and column B, the rrom [14]. GEVP values are from[22].

48 J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49
useful to implement the micro–macro idea based on the par-ticular realization of ensembles of molecules and the solu-tion of SDEs. In this context, it is important to check theperformance and applicability of the implicit algorithm pre-sented in this paper in the case of high-dimensional molecularmodels.
The archetypal molecular model with a high-dimensionalconfigurational space is the Rouse model. In addition, thismolecular model, expressed in normal coordinates, is fullyequivalent to a multi-modal Oldroyd-B constitutive equationand analytical solutions for particular examples are readilyavailable.
We tested the convergence and efficiency of the implicitmicro–macro method with Rouse chains in the same bench-mark problem as with Hookean dumbbells. The domain andboundary conditions are equivalent to those in Section3.1.We obtained the same degree of convergence in all pointsof space and time as in that case. More important is thecheck of the computational cost. In an explicit, uncoupledsimulation, it is clear that the cost is linear in the numberof springs in the chain. In a fully implicit formulation, thisbehavior is not so evident because, although the spring forceof the Rouse model is linear, the coupling between microand macro variables is not linear and it is not clear that theCPU time should scale linearly with the size of the prob-lem. However, asFig. 5shows, the CPU time needed for thist n theR , ando ce oft eldsM atedp
4
ofm tionF . An h thel e alg cularfi Them s forv ablyw ce ish
p-p for-m oseda andt igheW ncy,s olvet ea io ures
of each algorithm are interesting and, perhaps, design a bet-ter numerical scheme based on the combination of them. Itwould also be interesting to check if the proposed implicitalgorithm allows to extend the limit of accessibleWe num-bers in well known benchmark problems solved within themicro–macro framework.
An additional important issue is the search for an optimalpreconditioner for the implicit micro–macro calculations. Asthe Jacobian matrix is never available in memory, it is ratherdifficult to estimate how the preconditioner should be. In thepresent case, we rely on preconditioners that are known toperform very well in the Stokes problem. We believe thatthere may exist other possibilities that could help to signif-icantly increase the efficiency of our method. Two potentialimprovements could be the extension of the block precon-ditioner used in the present paper or the use of multigridsolvers.
Finally, we believe that the same ideas presented in thispaper can be applied in the case of the simulation of vis-coelastic flows based on the constitutive equation approach.The behavior of most polymeric materials used in the indus-try cannot be correctly approximated by means of a singlemode constitutive equation. The most frequently applied ap-proach is to represent the rheological behavior of the fluidby using several uncoupled modes of a certain CE. The sim-ulation of complex flows of multimodal viscoelastic fluids
theto
so-arof
n
est case is proportional to the number of segments iouse chains. Again, only two NR loops were neededne GMRES iteration per NR loop. This is a consequen
he homogeneous value in space of the hydrodynamic fiore GMRES iterations are expected in more complicroblems.
. Conclusions
An implementation of the implicit time integrationicro–macro problems based on the Brownian Configuraields for complex flows was presented for the first timeovel size reduction method was presented to deal wit
arge size of the linear systems under consideration. Thorithm allows an independent treatment for each moleeld and is well suited to parallel hardware architecture.ethod was tested on well known benchmark problem
iscoelastic flows, and the results compare very favorith obtainable analytical expressions. This equivalenighly encouraging.
Although not competitive with other micro–micro aroaches based on explicit or semi-implicit uncoupledulations in simple problems, we believe that the proplgorithm can help to extend the range of convergence
he quality of the results in more demanding cases at henumbers. An extensive comparison, in terms of efficie
tability and accuracy, between the different methods to sime dependent problems based on the micro–macro idf paramount importance in order to select which feat
.
-
r
s
represents, conceptually, a similar numerical problem tomicro–macro approach. It is of tremendous importancefind numerically stable and accurate algorithms to the relution of such problems, which also lead to very large linesystems. The most often used method to tackle this kind
Fig. 5. Computational cost for Rouse chains. Hours on an Intel® Xeon™CPU at 2.80 GHz, as a function of the number of segments in the chaiNs
(N = 1000,t = 0.1,h = 1,We = 1 andα = 0.5).

J. Ram´ırez, M. Laso / J. Non-Newtonian Fluid Mech. 127 (2005) 41–49 49
problems is the Discontinuous Galerkin method[23], whichdoes a locally implicit treatment of the equations at the levelof the element, but deals explicitly with the flux terms atthe boundaries. This method also allows the reduction of theproblem to the size of a typical Stokes calculation, but itis known to have convergence problems in time-dependentsimulations with low order time integration schemes. It isimportant to create algorithms which are appropriate to thesolution of very large problems like those arising from veryfine discretizations or three-dimensional geometries, spe-cially in the case of multi-modal constitutive equations.Also, after the recent introduction of the log-conformationmethod [24] which solves the high Weissenberg numberproblem, it becomes even more important to search for ef-ficient schemes and solvers for large problems. We thinkthat algebraic size reduction methods, combined with anappropriate preconditioning technique, could be a possibleoption.
Acknowledgement
J.R. and M.L. gratefully acknowledge financial supportfrom the EU through contract Ref. G5RD-CT-2002-00720(Project PMILS).
R
cu-luid
s ofew
ion99)
sionnian
free37–
freeech.
[7] J. Ramırez, M. Laso, Micro–macro simulations of three-dimensionalplane contraction flow, Modelling Simul. Mater. Sci. Eng. 12 (2004)1293–1306.
[8] M.A. Hulsen, A.P.G. van Heel, B.H.A.A. van den Brule, Simulationof viscoelastic flows using Brownian configuration fields, J. Non-Newtonian Fluid Mech. 70 (1997) 79–101.
[9] P. Halin, G. Lielens, R. Keunings, V. Legat, The Lagrangian particlemethod for macroscopic and micro-macro viscoelastic flow computa-tions (1998), preprint.
[10] P.G. Gigras, B. Khomami, Adaptive configuration fields: a new multi-scale simulation technique for reptation-based models with a stochasticstrain measure and local variations of life span distribution, J. Non-Newtonian Fluid Mech. 108 (2002) 99–122.
[11] D. Tran-Canh, T. Tran-Cong, Computation of viscoelastic flow usingneural networks and stochastic simulation, Korea-Aust. Rheol. J. 14(2002) 161–174.
[12] X. Fan, Molecular models and flow calculations: II. Simulation ofsteady planar flow, Acta Mech. Sin. 5 (1989) 216–226.
[13] A. Lozinski, C. Chauviere, J. Fang, R.G. Owens, A Fokker–Plancksimulation of fast flows of melts and concentrated polymer solutionsin complex geometries, J. Rheol. 47 (2003) 535–561.
[14] M. Somasi, B. Khomami, Computation linear stability and dynamicsof viscoelastic flows using time-dependent stochastic simulation tech-niques, J. Non-Newtonian Fluid Mech. 93 (2000) 339–362.
[15] M. Laso, J. Ramırez, M. Picasso, Implicit micro-macro methods, J.Non-Newtonian Fluid Mech. 122 (2004) 215–226.
[16] R.B. Bird, R.C. Armstrong, O. Hassager, Dynamics of polymeric liq-uids, vol. 1, Fluid Mechanics, John Wiley & Sons, New York, 1987.
[17] R. Owens, T. Phillips, Computational Rheology, Imperial CollegePress, London, 2002.
[18] R. Guenette, M. Fortin, A new mixed finite element method for com-95)
[ ong,owsnian
[ for. 84
[ tate256.
[ eart nu-57–
[ .E.H.sity73–
[ pastusing39.
eferences
[1] M. Laso, H.C.Ottinger, Calculation of viscoelastic flow using molelar models — the CONNFFESSIT approach, J. Non-Newtonian FMech. 47 (1993) 1–20.
[2] R.B. Bird, C.F. Curtiss, R.C. Armstrong, O. Hassager, Dynamicpolymeric liquids, vol. 2, Kinetic Theory, John Wiley & Sons, NYork, 1987.
[3] A.P.G. van Heel, M.A. Hulsen, B.H.A.A. van den Brule, Simulatof the Doi-Edwards model in complex flow, J. Rheol. 43 (5) (191239–1260.
[4] X.-J. Fan, N. Phan-Thien, R. Zheng, Simulation of fibre suspenflows by the Brownian configuration field method, J. Non-NewtoFluid Mech. 84 (1999) 257–274.
[5] J. Cormenzana, A. Ledda, M. Laso, B. Debbaut, Calculation ofsurface flows using CONNFFESSIT, J. Rheol. 45 (1) (2001) 2258.
[6] E. Grande, M. Laso, M. Picasso, Calculation of variable-topologysurface flows using CONNFFESSIT, J. Non-Newtonian Fluid M113 (2003) 127–145.
puting viscoelastic flows, J. Non-Newtonian Fluid Mech. 60 (1927–52.
19] M.J. Szady, T.R. Salamon, A.W. Liu, D.E. Bornside, R.C. ArmstrR.A. Brown, A new mixed finite element method for viscoelastic flgoverned by differential constitutive equations, J. Non-NewtoFluid Mech. 59 (1995) 215–243.
20] J. Bonvin, M. Picasso, Variance reduction methodsCONNFFESSIT-like simulations, J. Non-Newtonian Fluid Mech(1999) 191–215.
21] D. Kay, D. Loghin, A. Wathen, A preconditioner for the steady-sNavier-Stokes equations, SIAM J. Sci. Comput. 24 (1) (2002) 237–
22] R. Sureshkumar, M.D. Smith, R.C. Armstrong, R.A. Brown, Linstability and dynamics of viscoelastic flows using time-dependenmerical simulations, J. Non-Newtonian Fluid Mech. 82 (1999)104.
23] F.P.T. Baaijens, S.H.A. Selen, H.P.W. Baaijens, G.W.M. Peters, HMeijer, Viscoelastic flow past a confined cylinder of a low denpolyethylene melt, J. Non-Newtonian Fluid Mech. 68 (1997) 1203.
24] M.A. Hulsen, R. Fattal, R. Kupferman, Flow of viscoelastic fluidsa cylinder at high Weissenberg number: stabilized simulationsmatrix logarithms, J. Non-Newtonian Fluid Mech. 127 (2005) 27–





























