Embed Size (px)
DESCRIPTION
Article about UAVs (Drones), and a simulating in an outdoor scenario. Not mine, but a very good paper.
Citation preview

Simulating Quadrotor UAVs in Outdoor ScenariosAndrew Symington, Renzo De Nardi, Simon Julier and Stephen Hailes
{a.symington,r.denardi,s.julier,s.hailes}@ucl.ac.uk
Abstract—Motivated by the risks and costs associated withoutdoor experiments, this paper presents a new multi-platformquadrotor simulator. The simulator implements a novel second-order dynamic model for a quadrotor, produced through evo-lutionary programming, and explained by domain knowledge.The model captures the effects of mechanics, aerodynamics,wind and rotational stabilization control on the flight platform.In addition, the simulator implements military-grade modelsfor wind and turbulence, as well as noise models for satellitenavigation, barometric altitude and orientation. The usefulnessof the simulator is shown qualitatively by a comparing howcoloured and white position noise affect the performance ofoffline, range-only SLAM. The simulator is intended to beused for planning experiments, or for stress-testing applicationperformance over a wide range of operating conditions.
Index Terms—Unmanned Aerial Systems, Simulation
I. INTRODUCTION
Unmanned aerial vehicles (UAVs) have received significant
research attention as a result of the numerous military and
civilian applications that they enable. Quadrotors have proven
themselves as favourable platforms for research, since they
are inexpensive, easy to fly, agile and safe to operate [1].
Conducting outdoor experiments with quadrotors requires
ideal weather conditions and compliance with local aviation
regulations, uses significant resources, and puts platforms at
risk. It is therefore preferable to evaluate scenarios in sim-
ulation prior to experimentation, where possible. However,
the suitability of such an approach depends largely on the
fidelity of the simulator. The work in this paper is therefore
motivated by the need for a quadrotor simulator that (i)
enables multiple platforms to be simulated at the application
level, (ii) provides realistic models for dynamics, wind and
sensor noise, and (iii) balances accuracy with speed, thereby
enabling real-time, or near real-time, performance.
A great number of simulators exist as tools to for training
radio control enthusiasts, but not as platforms for research.
Research simulators based on first principles have been devel-
oped for USARSim [2] and Gazebo [3]. Both capture the be-
haviour of an ideal platform’s mechanics and aerodynamics,
but not of the low-level controller used to perform rotational
stabilization control. The design of the stabilization control
algorithm is usually proprietary, and therefore cannot be
modelled by first principles. Although effort has been made
to investigate the effect of wind and turbulence on quadrotor
dynamics [4], such research remains to be integrated into the
widely-used simulators. More recent simulators are based on
the Robotic Operating System (ROS) and include SwarmSim
X [5] and Hector Quadrotor [6], which use a PhysX and
Figure 1. A screen shot of a QRSim search and rescue simulation.
Gazebo as simulation cores respectively. The contribution of
this work is the open-source1 QRSIM simulator depicted in
Fig. 1 that distinguishes itself by:
1) A general second-order dynamic model that captures
the behaviour of mechanics, aerodynamics, wind and
stabilization control. The model is derived from flight
data using the co-evolutionary programming method,
with model parameters fitted to a specific platform.
2) Models for environment and sensor noise, including a
military-grade model for turbulence that is validated
against a third-party implementation, and a satellite
navigation model that is validated against raw data.
3) Implemented as self-contained Matlab code that is
controllable over a TCP/IP interface, with the goal of
being a modular and extensible tool for research.
The remainder of this paper is structured as follows. Sec.
II discusses the dynamic model used in the simulator, and
shows how model parameters were obtained for a specific
flight platform. Sec. III then describes the environmental and
sensor noise models, as well as how they were validated. Sec.
IV then provides a qualitative illustration of the usefulness of
the simulator by comparing the effect of white and coloured
sensor noise on offline, range-only simultaneous localization
and mapping (SLAM) for a single platform. Sec. V concludes
the paper, and discusses directions for future work.
II. QUADROTOR DYNAMICS AND CONTROL
A flight control system (FCS) performs sensing to deter-
mine orientation or position, and then selects corrective motor
changes to stabilize the platform [1]. Orientation is usually
1Source code is available at https://github.com/UCL-CompLACS/qrsim
2014 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS 2014)September 14-18, 2014, Chicago, IL, USA
978-1-4799-6934-0/14/$31.00 ©2014 IEEE 3382
3383
Z,W, r, 4J
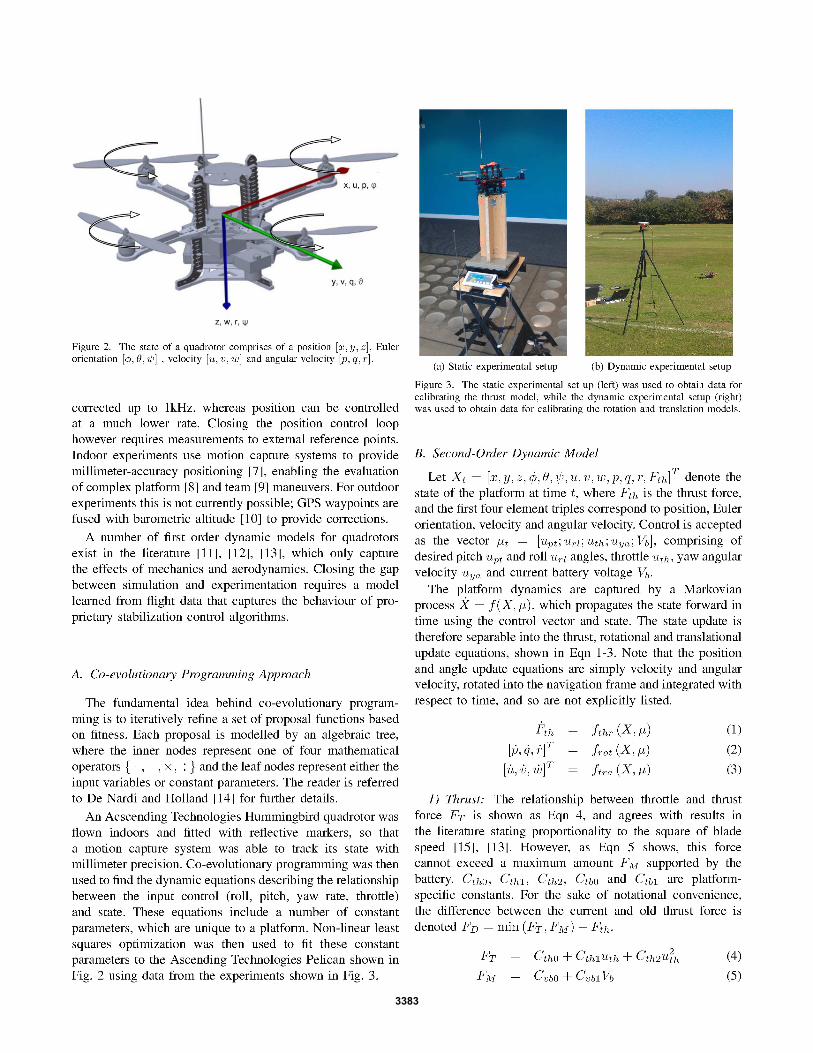
Figure 2. The state of a quadrotor comprises of a position [x, y, z], Eulerorientation [c/J, B, 7jJ] , velocity [u,v, w] and angular velocity [p, q,r].
(a) Static experimental setup (b) Dynamic experimental setup
Figure 3. The static experimental set up (left) was used to obtain data forcalibrating the thrust model, while the dynamic experimental setup (right)was used to obtain data for calibrating the rotation and translation models.
1) Thrust: The relationship between throttle and thrustforce FT is shown as Eqn 4, and agrees with results inthe literature stating proportionality to the square of bladespeed [15], [13]. However, as Eqn 5 shows, this forcecannot exceed a maximum amount FM supported by thebattery. CthO, Cth1, Cth2, CtbO and Ctb1 are platformspecific constants. For the sake of notational convenience,the difference between the current and old thrust force isdenoted F D = min (FT, F M) - Fth.
B. Second-Order Dynamic Model
Let X, = [x,y,z,¢,B,'if;,u,v,w,p,q,r,Fth]T denote thestate of the platform at time t, where F th is the thrust force,and the first four element triples correspond to position, Eulerorientation, velocity and angular velocity. Control is acceptedas the vector Ilt = [Upt; Uri; Uth; Uya; Vb], comprising ofdesired pitch Upt and roll Uri angles, throttle Uth, yaw angularvelocity u ya and current battery voltage Vb.
The platform dynamics are captured by a Markovianprocess X = f(X, Il), which propagates the state forward intime using the control vector and state. The state update istherefore separable into the thrust, rotational and translationalupdate equations, shown in Eqn 1-3. Note that the positionand angle update equations are simply velocity and angularvelocity, rotated into the navigation frame and integrated withrespect to time, and so are not explicitly listed.
CthO+ Cth1Uth + Cth2UZh
c.: + CVb1Vb
(4)
(5)
(1)
(2)
(3)
fthr (X, Il)
frat (X, Il)
ftra (X, Il)
Fth
[p,q,r]T[ ' , ']Tu,v,w
The fundamental idea behind co-evolutionary programming is to iteratively refine a set of proposal functions basedon fitness. Each proposal is modelled by an algebraic tree,where the inner nodes represent one of four mathematicaloperators {+, -, x ,~} and the leaf nodes represent either theinput variables or constant parameters. The reader is referredto De Nardi and Holland [14] for further details.
An Acscending Technologies Hummingbird quadrotor wasflown indoors and fitted with reflective markers, so thata motion capture system was able to track its state withmillimeter precision. Co-evolutionary programming was thenused to find the dynamic equations describing the relationshipbetween the input control (roll, pitch, yaw rate, throttle)and state. These equations include a number of constantparameters, which are unique to a platform. Non-linear leastsquares optimization was then used to fit these constantparameters to the Ascending Technologies Pelican shown inFig. 2 using data from the experiments shown in Fig. 3.
corrected up to 1kHz, whereas positron can be controlledat a much lower rate. Closing the position control loophowever requires measurements to external reference points.Indoor experiments use motion capture systems to providemillimeter-accuracy positioning [7], enabling the evaluationof complex platform [8] and team [9] maneuvers. For outdoorexperiments this is not currently possible; GPS waypoints arefused with barometric altitude [10] to provide corrections.
A number of first order dynamic models for quadrotorsexist in the literature [11], [12], [13], which only capturethe effects of mechanics and aerodynamics. Closing the gapbetween simulation and experimentation requires a modellearned from flight data that captures the behaviour of proprietary stabilization control algorithms.
A. Co-evolutionary Programming Approach
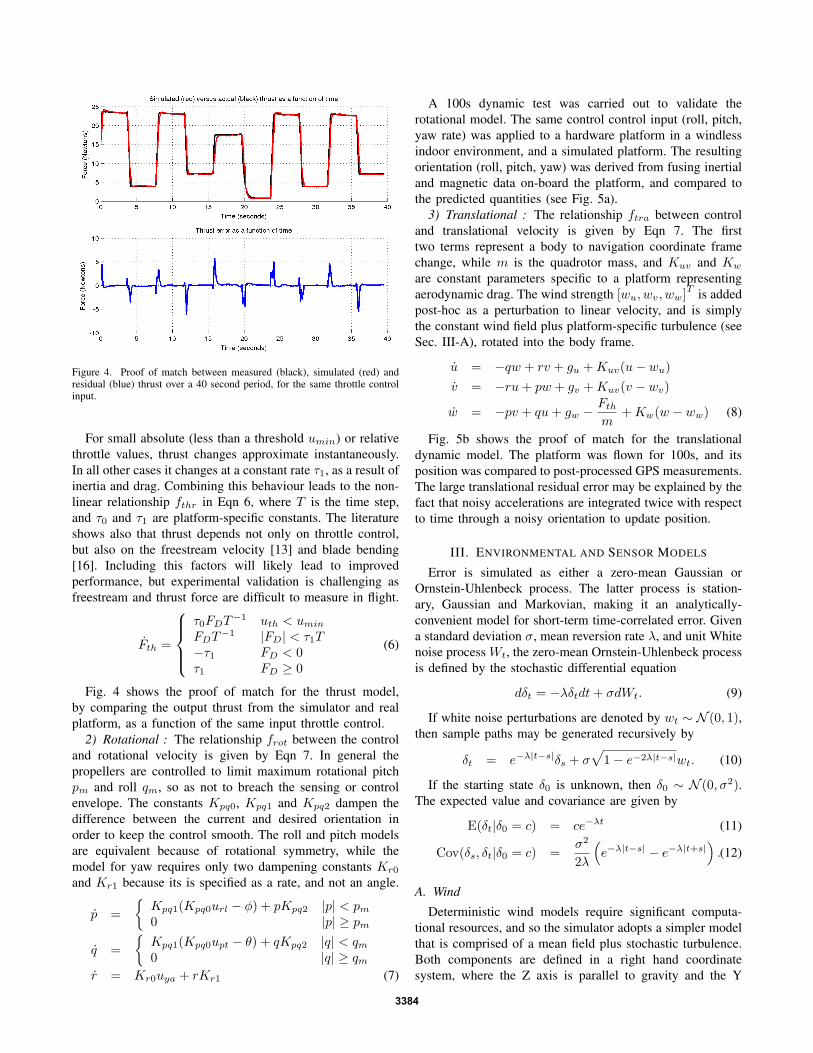
Figure 4. Proof of match between measured (black), simulated (red) andresidual (blue) thrust over a 40 second period, for the same throttle controlinput.
For small absolute (less than a threshold umin) or relative
throttle values, thrust changes approximate instantaneously.
In all other cases it changes at a constant rate τ1, as a result of
inertia and drag. Combining this behaviour leads to the non-
linear relationship fthr in Eqn 6, where T is the time step,
and τ0 and τ1 are platform-specific constants. The literature
shows also that thrust depends not only on throttle control,
but also on the freestream velocity [13] and blade bending
[16]. Including this factors will likely lead to improved
performance, but experimental validation is challenging as
freestream and thrust force are difficult to measure in flight.
Fth =
τ0FDT−1 uth < umin
FDT−1 |FD| < τ1T
−τ1 FD < 0τ1 FD ≥ 0
(6)
Fig. 4 shows the proof of match for the thrust model,
by comparing the output thrust from the simulator and real
platform, as a function of the same input throttle control.
2) Rotational : The relationship frot between the control
and rotational velocity is given by Eqn 7. In general the
propellers are controlled to limit maximum rotational pitch
pm and roll qm, so as not to breach the sensing or control
envelope. The constants Kpq0, Kpq1 and Kpq2 dampen the
difference between the current and desired orientation in
order to keep the control smooth. The roll and pitch models
are equivalent because of rotational symmetry, while the
model for yaw requires only two dampening constants Kr0
and Kr1 because its is specified as a rate, and not an angle.
p =
{
Kpq1(Kpq0url − φ) + pKpq2 |p| < pm0 |p| ≥ pm
q =
{
Kpq1(Kpq0upt − θ) + qKpq2 |q| < qm0 |q| ≥ qm
r = Kr0uya + rKr1 (7)
A 100s dynamic test was carried out to validate the
rotational model. The same control control input (roll, pitch,
yaw rate) was applied to a hardware platform in a windless
indoor environment, and a simulated platform. The resulting
orientation (roll, pitch, yaw) was derived from fusing inertial
and magnetic data on-board the platform, and compared to
the predicted quantities (see Fig. 5a).
3) Translational : The relationship ftra between control
and translational velocity is given by Eqn 7. The first
two terms represent a body to navigation coordinate frame
change, while m is the quadrotor mass, and Kuv and Kw
are constant parameters specific to a platform representing
aerodynamic drag. The wind strength [wu, wv, ww]T
is added
post-hoc as a perturbation to linear velocity, and is simply
the constant wind field plus platform-specific turbulence (see
Sec. III-A), rotated into the body frame.
u = −qw + rv + gu +Kuv(u− wu)
v = −ru+ pw + gv +Kuv(v − wv)
w = −pv + qu+ gw −Fth
m+Kw(w − ww) (8)
Fig. 5b shows the proof of match for the translational
dynamic model. The platform was flown for 100s, and its
position was compared to post-processed GPS measurements.
The large translational residual error may be explained by the
fact that noisy accelerations are integrated twice with respect
to time through a noisy orientation to update position.
III. ENVIRONMENTAL AND SENSOR MODELS
Error is simulated as either a zero-mean Gaussian or
Ornstein-Uhlenbeck process. The latter process is station-
ary, Gaussian and Markovian, making it an analytically-
convenient model for short-term time-correlated error. Given
a standard deviation σ, mean reversion rate λ, and unit White
noise process Wt, the zero-mean Ornstein-Uhlenbeck process
is defined by the stochastic differential equation
dδt = −λδtdt+ σdWt. (9)
If white noise perturbations are denoted by wt ∼ N (0, 1),then sample paths may be generated recursively by
δt = e−λ|t−s|δs + σ√
1− e−2λ|t−s|wt. (10)
If the starting state δ0 is unknown, then δ0 ∼ N (0, σ2).The expected value and covariance are given by
E(δt|δ0 = c) = ce−λt (11)
Cov(δs, δt|δ0 = c) =σ2
2λ
(
e−λ|t−s| − e−λ|t+s|)
.(12)
A. Wind
Deterministic wind models require significant computa-
tional resources, and so the simulator adopts a simpler model
that is comprised of a mean field plus stochastic turbulence.
Both components are defined in a right hand coordinate
system, where the Z axis is parallel to gravity and the Y
3384
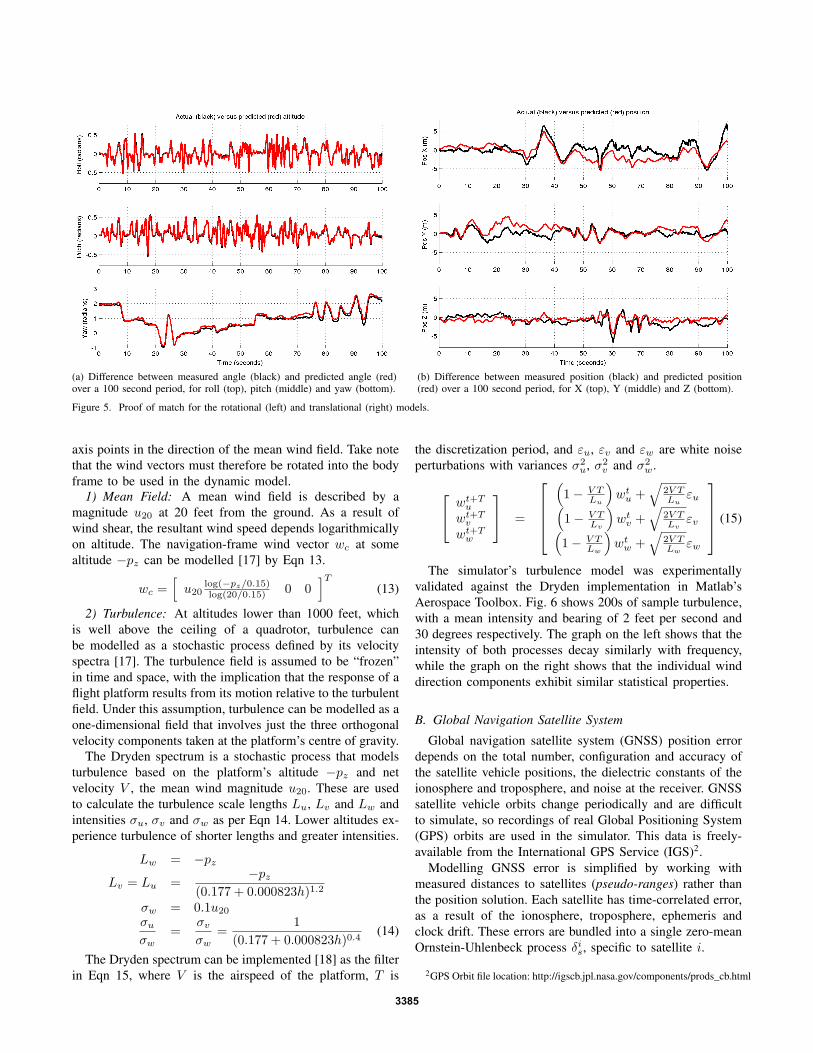
(a) Difference between measured angle (black) and predicted angle (red)over a 100 second period, for roll (top), pitch (middle) and yaw (bottom).
(b) Difference between measured position (black) and predicted position(red) over a 100 second period, for X (top), Y (middle) and Z (bottom).
Figure 5. Proof of match for the rotational (left) and translational (right) models.
axis points in the direction of the mean wind field. Take note
that the wind vectors must therefore be rotated into the body
frame to be used in the dynamic model.
1) Mean Field: A mean wind field is described by a
magnitude u20 at 20 feet from the ground. As a result of
wind shear, the resultant wind speed depends logarithmically
on altitude. The navigation-frame wind vector wc at some
altitude −pz can be modelled [17] by Eqn 13.
wc =[
u20log(−pz/0.15)log(20/0.15) 0 0
]T
(13)
2) Turbulence: At altitudes lower than 1000 feet, which
is well above the ceiling of a quadrotor, turbulence can
be modelled as a stochastic process defined by its velocity
spectra [17]. The turbulence field is assumed to be “frozen”
in time and space, with the implication that the response of a
flight platform results from its motion relative to the turbulent
field. Under this assumption, turbulence can be modelled as a
one-dimensional field that involves just the three orthogonal
velocity components taken at the platform’s centre of gravity.
The Dryden spectrum is a stochastic process that models
turbulence based on the platform’s altitude −pz and net
velocity V , the mean wind magnitude u20. These are used
to calculate the turbulence scale lengths Lu, Lv and Lw and
intensities σu, σv and σw as per Eqn 14. Lower altitudes ex-
perience turbulence of shorter lengths and greater intensities.
Lw = −pz
Lv = Lu =−pz
(0.177 + 0.000823h)1.2
σw = 0.1u20
σu
σw=
σv
σw=
1
(0.177 + 0.000823h)0.4(14)
The Dryden spectrum can be implemented [18] as the filter
in Eqn 15, where V is the airspeed of the platform, T is
the discretization period, and εu, εv and εw are white noise
perturbations with variances σ2u, σ2
v and σ2w.
wt+Tu
wt+Tv
wt+Tw
=
(
1− V TLu
)
wtu +√
2V TLu
εu(
1− V TLv
)
wtv +√
2V TLv
εv(
1− V TLw
)
wtw +√
2V TLw
εw
(15)
The simulator’s turbulence model was experimentally
validated against the Dryden implementation in Matlab’s
Aerospace Toolbox. Fig. 6 shows 200s of sample turbulence,
with a mean intensity and bearing of 2 feet per second and
30 degrees respectively. The graph on the left shows that the
intensity of both processes decay similarly with frequency,
while the graph on the right shows that the individual wind
direction components exhibit similar statistical properties.
B. Global Navigation Satellite System
Global navigation satellite system (GNSS) position error
depends on the total number, configuration and accuracy of
the satellite vehicle positions, the dielectric constants of the
ionosphere and troposphere, and noise at the receiver. GNSS
satellite vehicle orbits change periodically and are difficult
to simulate, so recordings of real Global Positioning System
(GPS) orbits are used in the simulator. This data is freely-
available from the International GPS Service (IGS)2.
Modelling GNSS error is simplified by working with
measured distances to satellites (pseudo-ranges) rather than
the position solution. Each satellite has time-correlated error,
as a result of the ionosphere, troposphere, ephemeris and
clock drift. These errors are bundled into a single zero-mean
Ornstein-Uhlenbeck process δis, specific to satellite i.
2GPS Orbit file location: http://igscb.jpl.nasa.gov/components/prods_cb.html
3385
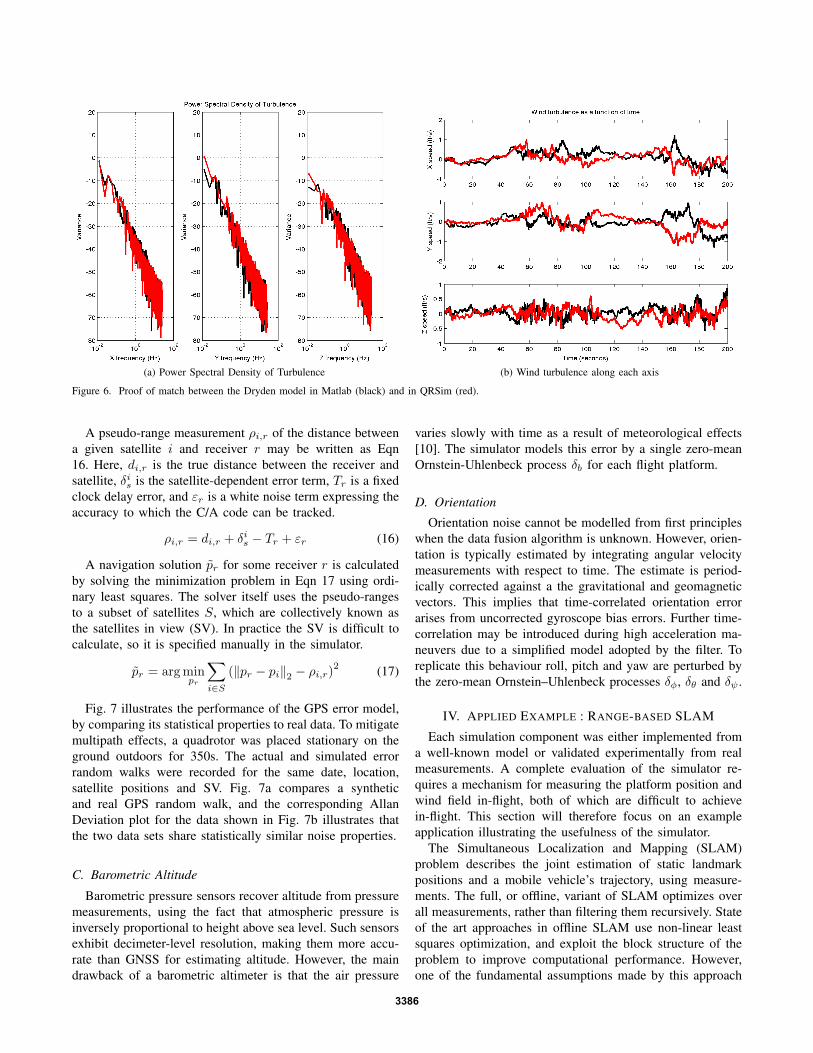
(a) Power Spectral Density of Turbulence (b) Wind turbulence along each axis
Figure 6. Proof of match between the Dryden model in Matlab (black) and in QRSim (red).
A pseudo-range measurement ρi,r of the distance between
a given satellite i and receiver r may be written as Eqn
16. Here, di,r is the true distance between the receiver and
satellite, δis is the satellite-dependent error term, Tr is a fixed
clock delay error, and εr is a white noise term expressing the
accuracy to which the C/A code can be tracked.
ρi,r = di,r + δis − Tr + εr (16)
A navigation solution pr for some receiver r is calculated
by solving the minimization problem in Eqn 17 using ordi-
nary least squares. The solver itself uses the pseudo-ranges
to a subset of satellites S, which are collectively known as
the satellites in view (SV). In practice the SV is difficult to
calculate, so it is specified manually in the simulator.
pr = argminpr
∑
i∈S
(‖pr − pi‖2 − ρi,r)2
(17)
Fig. 7 illustrates the performance of the GPS error model,
by comparing its statistical properties to real data. To mitigate
multipath effects, a quadrotor was placed stationary on the
ground outdoors for 350s. The actual and simulated error
random walks were recorded for the same date, location,
satellite positions and SV. Fig. 7a compares a synthetic
and real GPS random walk, and the corresponding Allan
Deviation plot for the data shown in Fig. 7b illustrates that
the two data sets share statistically similar noise properties.
C. Barometric Altitude
Barometric pressure sensors recover altitude from pressure
measurements, using the fact that atmospheric pressure is
inversely proportional to height above sea level. Such sensors
exhibit decimeter-level resolution, making them more accu-
rate than GNSS for estimating altitude. However, the main
drawback of a barometric altimeter is that the air pressure
varies slowly with time as a result of meteorological effects
[10]. The simulator models this error by a single zero-mean
Ornstein-Uhlenbeck process δb for each flight platform.
D. Orientation
Orientation noise cannot be modelled from first principles
when the data fusion algorithm is unknown. However, orien-
tation is typically estimated by integrating angular velocity
measurements with respect to time. The estimate is period-
ically corrected against a the gravitational and geomagnetic
vectors. This implies that time-correlated orientation error
arises from uncorrected gyroscope bias errors. Further time-
correlation may be introduced during high acceleration ma-
neuvers due to a simplified model adopted by the filter. To
replicate this behaviour roll, pitch and yaw are perturbed by
the zero-mean Ornstein–Uhlenbeck processes δφ, δθ and δψ .
IV. APPLIED EXAMPLE : RANGE-BASED SLAM
Each simulation component was either implemented from
a well-known model or validated experimentally from real
measurements. A complete evaluation of the simulator re-
quires a mechanism for measuring the platform position and
wind field in-flight, both of which are difficult to achieve
in-flight. This section will therefore focus on an example
application illustrating the usefulness of the simulator.
The Simultaneous Localization and Mapping (SLAM)
problem describes the joint estimation of static landmark
positions and a mobile vehicle’s trajectory, using measure-
ments. The full, or offline, variant of SLAM optimizes over
all measurements, rather than filtering them recursively. State
of the art approaches in offline SLAM use non-linear least
squares optimization, and exploit the block structure of the
problem to improve computational performance. However,
one of the fundamental assumptions made by this approach
3386

(a) Position error random walk. (b) Allan deviation of position error.
Figure 7. Proof of match between real (black) and synthetic (red) GPS errors, for the same date, location and satellites in view.
is that the measurement noise is white. However, in real
world problems this is seldom the case, but the approach
is nonetheless widely used. The objective of this section is
to qualitatively demonstrate the usefulness of the quadrotor
simulator through an investigation of the effect of coloured
GPS noise on offline, range-only SLAM.
To achieve this, two simulations were carried out. In
both simulations one quadrotor collected range measurements
to ten landmarks, which were distributed randomly over a
40× 40 meter search region. The quadrotor moved between
randomly chosen waypoints drawn uniformly from the re-
gion, at an altitude of 20m. Each measurement was perturbed
by white noise with a standard deviation of 5m. The sensing
range was a sphere with radius 25m which, as a result of the
quadrotor’s altitude, results in a 15m sensing range on the
ground plane. In both simulations the only source of error in
the state estimate originated GPS noise. In the first “coloured
noise” experiment the GPS pseudoranges were perturbed by
errors with a standard deviation and time constant of 0.003m
and 1.005s, and a white receiver noise error with a standard
deviation of 0.002m. The second “white noise” simulation
used a truthful position estimate perturbed by white noise.
Both simulations used the same landmarks and sequence of
waypoints, and the latitude and longitude were perturbed in
the “white noise” simulation with a standard deviation equal
to what was measured in the “coloured noise” simulation.
x0 xt µt xt+1
xinit dt,i ai dt+1,i
xT· · · · · ·
Figure 8. The offline, range-based SLAM problem expressed as a graph.Circles represent unknown states, while rectangles represent observations.
The offline range-based SLAM problem can be expressed
as the graphical model in Fig. 8. Unknown state values
are shown as circles, while measurements are shown as
rectangles. Control µt (comprising of roll, pitch, yaw rate,
throttle) relates two sequential states xt and xt+1 through
the second order dynamic model function described in Sec
II. A “range measurement” is a distance d in meters between
the position ai of some anchor i, and the position xpost of
the quadrotor at some time t. A “prior measurement” is a
constraint placed on the initial state of the quadrotor.
For both of the simulations a graph was built using
the control, range estimates and prior, and a non-linear
least squares solution was obtained over 10 iterations using
CERES-SOLVER3. The initial trajectory estimate was taken
as the estimate produced by the simulator, i.e. corrupted by
either white or coloured noise, depending on the simulation.
The same set of random coordinates were used for initial
landmark positions in both simulations.
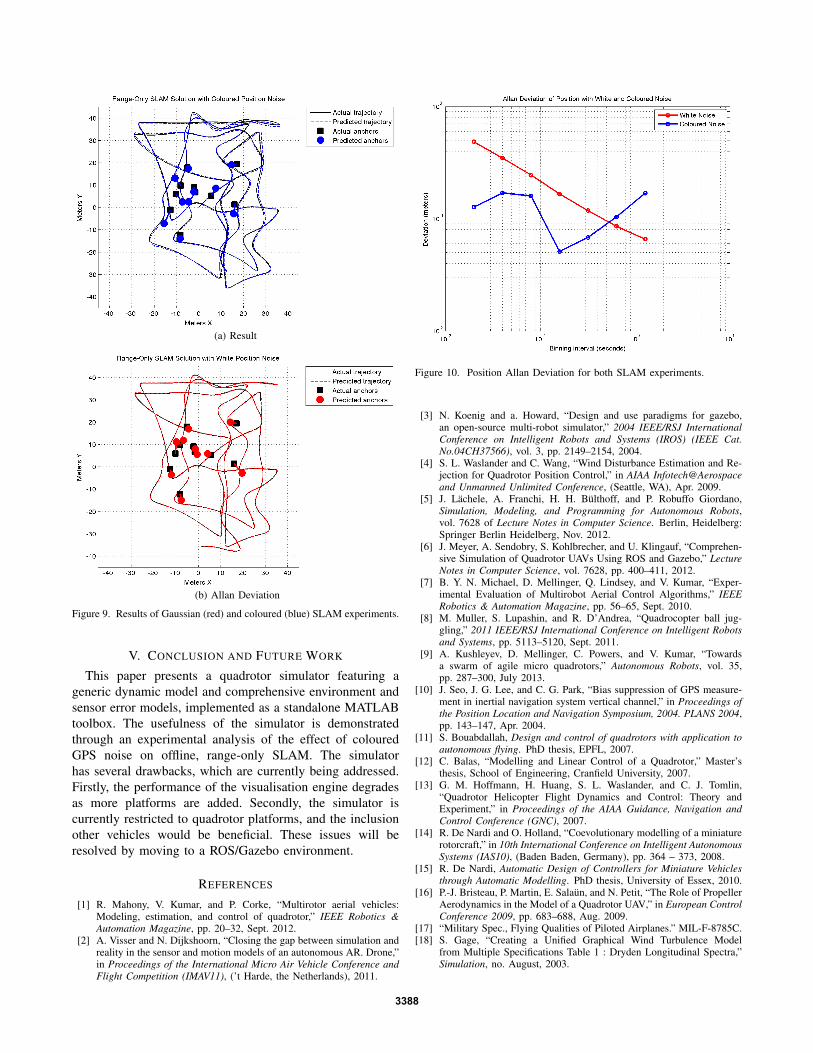
The two resulting trajectories and anchor points are shown
in Fig. 9. It is evident that time-correlated position error
affects the accuracy to which one is able to localize and
map using a standard SLAM approach – the trajectory and
anchor points lie further from the truth in the case of time-
correlated position error. The underlying reason for this is
that time-correlated position error manifests as control error.
The result being that measurements relating sequential states
violate the white noise assumption made by the least-squares
solver, which leads to a sub-optimal solution. The Allan
Deviation plot in Fig. 10 provides a graphical summary of
the position error; in the white noise experiment noise can be
reduced by successive averaging of measurements, whereas
the same does not apply to time-correlated GPS error.
3Available: https://code.google.com/p/ceres-solver
3387
(a) Result
(b) Allan Deviation
Figure 9. Results of Gaussian (red) and coloured (blue) SLAM experiments.
V. CONCLUSION AND FUTURE WORK
This paper presents a quadrotor simulator featuring a
generic dynamic model and comprehensive environment and
sensor error models, implemented as a standalone MATLAB
toolbox. The usefulness of the simulator is demonstrated
through an experimental analysis of the effect of coloured
GPS noise on offline, range-only SLAM. The simulator
has several drawbacks, which are currently being addressed.
Firstly, the performance of the visualisation engine degrades
as more platforms are added. Secondly, the simulator is
currently restricted to quadrotor platforms, and the inclusion
other vehicles would be beneficial. These issues will be
resolved by moving to a ROS/Gazebo environment.
REFERENCES
[1] R. Mahony, V. Kumar, and P. Corke, “Multirotor aerial vehicles:Modeling, estimation, and control of quadrotor,” IEEE Robotics &
Automation Magazine, pp. 20–32, Sept. 2012.[2] A. Visser and N. Dijkshoorn, “Closing the gap between simulation and
reality in the sensor and motion models of an autonomous AR. Drone,”in Proceedings of the International Micro Air Vehicle Conference and
Flight Competition (IMAV11), (’t Harde, the Netherlands), 2011.
Figure 10. Position Allan Deviation for both SLAM experiments.
[3] N. Koenig and a. Howard, “Design and use paradigms for gazebo,an open-source multi-robot simulator,” 2004 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS) (IEEE Cat.
No.04CH37566), vol. 3, pp. 2149–2154, 2004.[4] S. L. Waslander and C. Wang, “Wind Disturbance Estimation and Re-
jection for Quadrotor Position Control,” in AIAA Infotech@Aerospace
and Unmanned Unlimited Conference, (Seattle, WA), Apr. 2009.[5] J. Lächele, A. Franchi, H. H. Bülthoff, and P. Robuffo Giordano,
Simulation, Modeling, and Programming for Autonomous Robots,vol. 7628 of Lecture Notes in Computer Science. Berlin, Heidelberg:Springer Berlin Heidelberg, Nov. 2012.
[6] J. Meyer, A. Sendobry, S. Kohlbrecher, and U. Klingauf, “Comprehen-sive Simulation of Quadrotor UAVs Using ROS and Gazebo,” Lecture
Notes in Computer Science, vol. 7628, pp. 400–411, 2012.[7] B. Y. N. Michael, D. Mellinger, Q. Lindsey, and V. Kumar, “Exper-
imental Evaluation of Multirobot Aerial Control Algorithms,” IEEE
Robotics & Automation Magazine, pp. 56–65, Sept. 2010.[8] M. Muller, S. Lupashin, and R. D’Andrea, “Quadrocopter ball jug-
gling,” 2011 IEEE/RSJ International Conference on Intelligent Robots
and Systems, pp. 5113–5120, Sept. 2011.[9] A. Kushleyev, D. Mellinger, C. Powers, and V. Kumar, “Towards
a swarm of agile micro quadrotors,” Autonomous Robots, vol. 35,pp. 287–300, July 2013.
[10] J. Seo, J. G. Lee, and C. G. Park, “Bias suppression of GPS measure-ment in inertial navigation system vertical channel,” in Proceedings of
the Position Location and Navigation Symposium, 2004. PLANS 2004,pp. 143–147, Apr. 2004.
[11] S. Bouabdallah, Design and control of quadrotors with application to
autonomous flying. PhD thesis, EPFL, 2007.[12] C. Balas, “Modelling and Linear Control of a Quadrotor,” Master’s
thesis, School of Engineering, Cranfield University, 2007.[13] G. M. Hoffmann, H. Huang, S. L. Waslander, and C. J. Tomlin,
“Quadrotor Helicopter Flight Dynamics and Control: Theory andExperiment,” in Proceedings of the AIAA Guidance, Navigation and
Control Conference (GNC), 2007.[14] R. De Nardi and O. Holland, “Coevolutionary modelling of a miniature
rotorcraft,” in 10th International Conference on Intelligent Autonomous
Systems (IAS10), (Baden Baden, Germany), pp. 364 – 373, 2008.[15] R. De Nardi, Automatic Design of Controllers for Miniature Vehicles
through Automatic Modelling. PhD thesis, University of Essex, 2010.[16] P.-J. Bristeau, P. Martin, E. Salaün, and N. Petit, “The Role of Propeller
Aerodynamics in the Model of a Quadrotor UAV,” in European Control
Conference 2009, pp. 683–688, Aug. 2009.[17] “Military Spec., Flying Qualities of Piloted Airplanes.” MIL-F-8785C.[18] S. Gage, “Creating a Unified Graphical Wind Turbulence Model
from Multiple Specifications Table 1 : Dryden Longitudinal Spectra,”Simulation, no. August, 2003.
3388





























