Embed Size (px)
Citation preview
Introducing the Quadrotor Introducing the Quadrotor Flying RobotFlying Robot
Roy BrewerOrganizer
Philadelphia Robotics Meetup GroupPhiladelphia Robotics Meetup Group
August 13, 2009

13 Aug 09 2R. Brewer - Philly Meetup Quadrotor
What is a Quadrotor?● A vehicle having 4 rotors
(propellers) at each end of a square cross
● Typically remote controlled; can be autonomous or semi-autonomous
● Home built, research, and professional versions exist
● Typically built using r/c components, electric motors, microprocessors, servos, sensors, batteries

13 Aug 09 3R. Brewer - Philly Meetup Quadrotor
What is a Quadrotor Used For?● Fun radio controlled “toy”● Aerial Photography / Video● Surveillance● Robotics and/or Control Systems Research

13 Aug 09 4R. Brewer - Philly Meetup Quadrotor
How Does a Quadrotor Fly?• Rotor thrust and torque proportional
to rotor speed squared• 2 sets of counter rotating blades. • Torque inherently balanced• 4 inputs allow independent
actuation of pitch, roll, yaw and thrust
Controlling Roll/PitchControlling Roll/Pitch
Controlling AltitudeControlling Altitude
Controlling YawControlling Yaw

13 Aug 09 5R. Brewer - Philly Meetup Quadrotor
How to Obtain a Quadrotor?● Buy
– http://www.asctec.de– http://www.microdrones.com– http://www.draganfly.com
● Build (existing kits & plans)– http://aeroquad.info/bin/view/Main/WebHome– http://mikrokopter.de– http://uavp.ch/moin
(Why are there so many German quads? :-)
● Comprehesive list:– http://multicopter.org/wiki/Multicopter_Table
● Design Our Own!

13 Aug 09 6R. Brewer - Philly Meetup Quadrotor
University Research● STARMAC – Stanford
– http://hybrid.eecs.berkeley.edu/index.php?section=37● MIT
– http://vertol.mit.edu/index.html● EPFL
– http://asl.epfl.ch/research/projects/VtolIndoorFlying/indoorFlying.php
● Brigham Young– http://www.ece.byu.edu/roboticvision/HelicopterPlatform/Heli
copterPlatform.html● Many more...● Many technical research papers available on-line● Task is equivalent to B.S Eng Project up to PhD Thesis!
13 Aug 09 7R. Brewer - Philly Meetup Quadrotor
Skills / KnowledgeMy contribution:● Control Theory & Algorithms (PID etc.)
I Have Some Knowledge of:● Sensors (MEMs, GPS, Compass)● Microcontrollers, Embedded Systems, & Software● DSP / Filtering
What I need to learn:● Radio Control Equipment● (Brushless) Motors & Servos● Vision processing● Airframe Design & Construction● PC / ground station programming
13 Aug 09 8R. Brewer - Philly Meetup Quadrotor
Personal Goals:● Professional Development
– UAV– Advanced Controls– Sensor Processing / Sensor Fusion
● Kalman, Complementary Filters, etc● Personal
– Microcontrollers– Embedded S/W– Electronics– Radio Control– Website / Blog / Magazine Articles
13 Aug 09 9R. Brewer - Philly Meetup Quadrotor
Project Goals:● Manual (Radio Control) Operation
– Acrobatic mode: angular rate & thrust command– Stable Mode: Translational rate command / position and
altitude hold● Semi Autonomous Operation
– Telemetry to Laptop-based ground station– Voice operation
● Fully Acrobatic● Automatic P.I.D. Gain tuning● Other
– Provide Write-ups of Quad Dynamics, Control Loops (and theory), & S/W Design
– Use Open Souce / Free S/W tools where possible

13 Aug 09 10R. Brewer - Philly Meetup Quadrotor
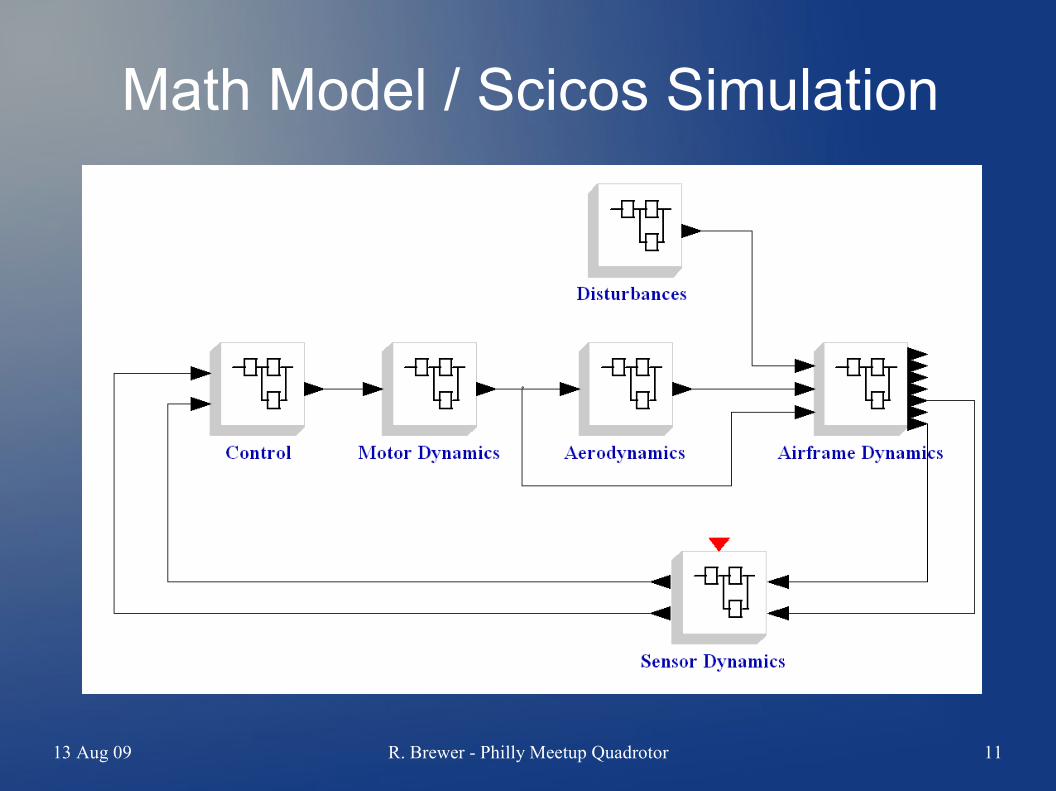
Project Status● Software
– Math / Simulation Model ● Needs some work – drag models, etc.● Good enough to begin code prototyping
– Code● About to prototype control ideas
● Hardware– Controller
● My friend Brijesh has designed, built and is testing a custom AVR ATMega644p based board:
– Airframe, motors, ESCs, R/C gear, propellers, etc.● Some ideas, but nothing yet purchased
13 Aug 09 11R. Brewer - Philly Meetup Quadrotor
Math Model / Scicos Simulation

13 Aug 09 12R. Brewer - Philly Meetup Quadrotor
Custom Controller Card * ATMEGA644p processor ( Same as Sanguino). * 20 MHz clock rate. * Serial port 1 : USB or Xbee link. o Arduino bootloader supported on both USB and Xbee links. * Serial port 2 : Venus GPS module from Sparkfun. * 4 Channel RC receiver input. Interrupt based de-coding. * 4 Channel Hardware PWM/Servo pulse. * Terminals to distribute power to 4 ESC's from battery. * 4 pole Butterworth Anti-aliasing filters on all sensors inputs. * Gyros o IDG500 Break out board connector (X and Y axis) + IDG500 output selectable between 100 Deg/sec or 500 Deg/sec via a jumper. o LISY300AL break out board connector (Z axis) * Accelerometer: Two options available o MMA7260 breakout board connector. (Ana-log outputs). o LIS302DL breakout board connector, (I2C in-terface). * Battery voltage monitoring. * 3inx3in Dimensions with 4 mountings holes.
● http://sites.google.com/site/pushpakquadrotor

13 Aug 09 13R. Brewer - Philly Meetup Quadrotor
Technical Challenges - Control● Airframe Dynamics Are:
– Non-linear: ● 3-D Attitude (orientation): Trig functions,
Singularities, Quaternions– Coupled:
● Translation requires attitude changes● Attitude change requires thrust change to avoid
altitude (height) change● Many control schemes are employed
– “Simple” Proportional Integral Derivative (PID)– More advanced non-linear concepts– Distributed control – split on-board and laptop
13 Aug 09 14R. Brewer - Philly Meetup Quadrotor
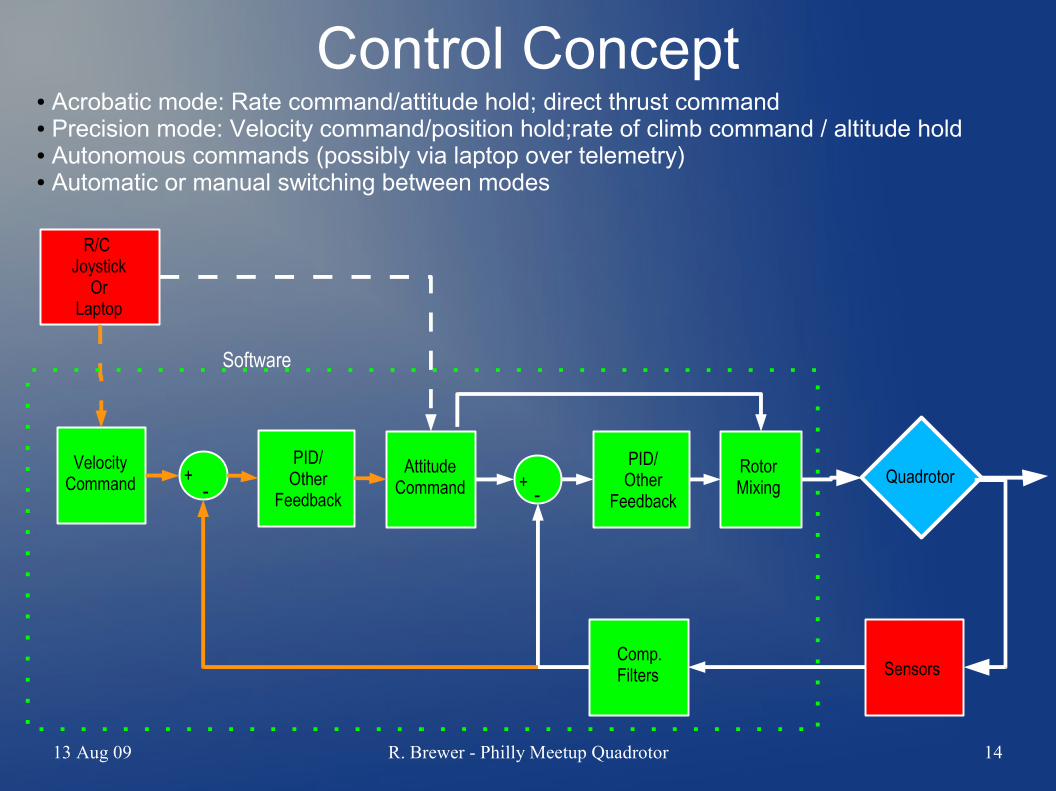
Control Concept● Acrobatic mode: Rate command/attitude hold; direct thrust command● Precision mode: Velocity command/position hold;rate of climb command / altitude hold ● Autonomous commands (possibly via laptop over telemetry)● Automatic or manual switching between modes
Quadrotor
SensorsComp.Filters
R/C Joystick
OrLaptop
AttitudeCommand
RotorMixing
PID/Other
Feedback
VelocityCommand
PID/Other
Feedback+ -
+-
Software
13 Aug 09 15R. Brewer - Philly Meetup Quadrotor
Technical Challenges - Sensors● Must sense position & orientation to control them● Gyroscopes
– Sense angular rates– Suffer from bias– Must be integrated to determine attitude– Usable only in a medium frequency range
● Accelerometers– Sense linear acceleration– Very noisy– Gravity must be handled carefully– Useable only in a low frequency range
● Other sensors:– GPS, Sonar, Magnetometer/Compass, Vision, etc.

13 Aug 09 16R. Brewer - Philly Meetup Quadrotor
Sensor Fusion● Complementary Filter
– Concept: utilize each sensor over the frequency range where they provide good attitude data
– Integrate and High Pass filter gyro data– Low Pass Filter accelerometer ATAN data– Tune filter based on data– Inverse of stereo woofer/tweeter network
● Kalman Filter– Contains model/observer/predictor– And corrector feedback loop with varying gain– Uses statistical parameters– Much more complicated to understand and implement

13 Aug 09 17R. Brewer - Philly Meetup Quadrotor
Complementary Filter Design - 1
1/s
1/s
+
+
+
+
-
k*k
2*k
11
22
11
Gyro (deg/s)Gyro (deg/s)
Accel (deg)Accel (deg)
SCICOS Model

13 Aug 09 18R. Brewer - Philly Meetup Quadrotor
37.0 37.5 38.0 38.5 39.0 39.5 40.0 40.5 41.0-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
2nd Order Complementary Filter
T im e (sec)
Atti
tude
(deg
) & R
ate
(deg
/s)
Gyro
Accel
Fi l ter
T rue Angle
Complementary Filter Design - 2
13 Aug 09 19R. Brewer - Philly Meetup Quadrotor
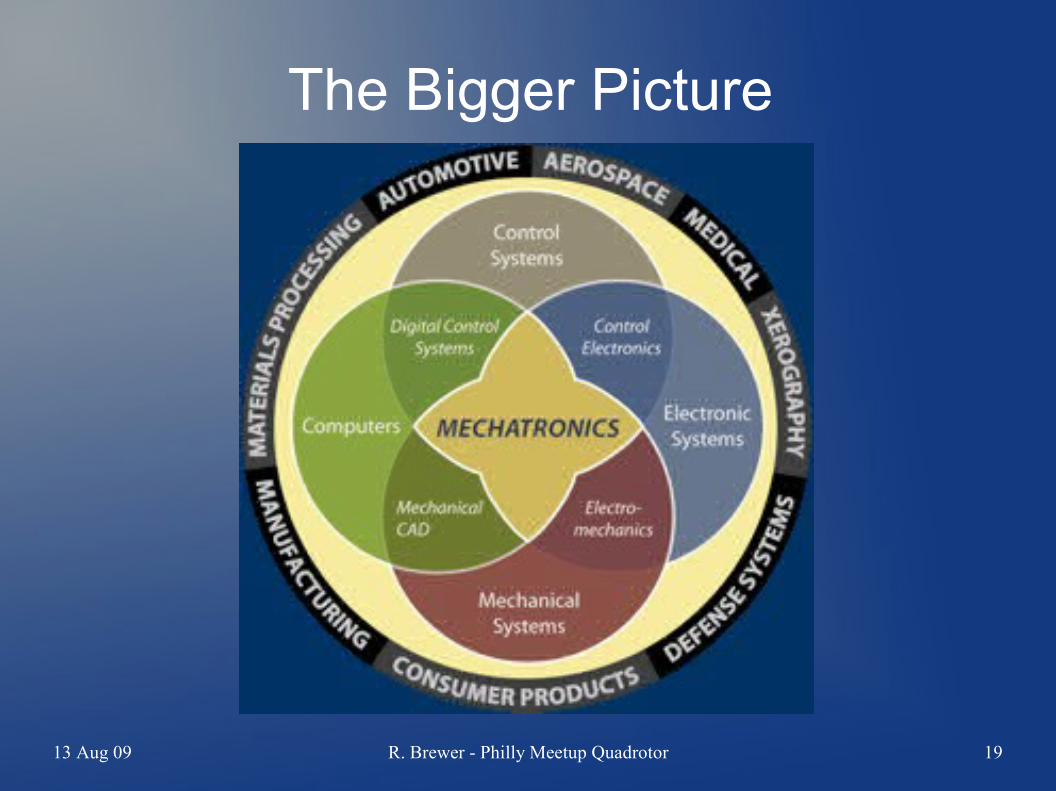
The Bigger Picture

13 Aug 09 20R. Brewer - Philly Meetup Quadrotor
Other Links from the Meetup● DIY Drones – UAVs - http://diydrones.com● Sparkfun – Electronic Parts & tutorials - http://www.sparkfun.com● Arduino – Microprocessors simplified - http://www.arduino.cc/● AVR Freaks – lots of info for AVR microprocessors
http://www.avrfreaks.net
● Scilab/Scicos – Free Matlab clone - http://www.scilab.org; http://scicos.org; http://scicoslab.com
● Open Office – MS Office “clone” - http://www.openoffice.org● Magazines
– Nuts and Volts – general electronics - http://www.nutsvolts.com
– Servo – robotics - http://www.servomagazine.com
– Circuit Cellar – pro electronics - http://www.circellar.com
– Elektor – UK electronics -http://www.elektor.com/magazines.46742.lynkx
– Robot – robotics - http://www.botmag.com




























