Embed Size (px)
Citation preview
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Simulate MER Opportunity Rover Real
Maneuver in Adams Solver 2012 International Ground Vehicle Users Symposium
Presented By: Feng Zhou
Co-Authors: Ray Arvidson, Brian Trease, Randel Lindemann, Paolo Bellutta, Scott
Maxwell, Karl Iagnemma, Keith Bennett, Carmine Senatore
October 19, 2012

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Background: Spirit and Opportunity Rovers
2
•Six wheel drive
with rigid wheels
•Outer four wheels
able to turn
•Rocker-bogie
suspension system
•Navigation and
hazard avoidance
Systems

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Background: Spirit and Opportunity Rovers status
3
Spirit Opportunity
•Right front wheel drive actuator
failed on sol 779 so subsequent drives
caused rotations about that wheel
•Embedded in sands of Troy after
breaking through soil crust
•Extrication stopped on Sol 2169 to
prepare for winter
•Last communication March 2010 and
mission over May 2011
•Right front wheel left rotated ~8 deg
inward when azimuthal actuator failed
•Shoulder IDD actuator failed so driving
uses “fishing stow” and have limited
Deployment work space
•Mini-TES no longer responding
•Already exceeds 35 kilometers of
driving
•Still working at Cape York on the rim
of Endeavour Crater
Note: Information from http://marsrovers.jpl.nasa.gov/mission/status.html
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Terramechanics effort to MER rovers
4
A lot of efforts have been put to free Spirit from embedding sand. One effort is to
form a multidisciplinary team from WUSTL, JPL, MIT to help MER rover planners
on:
Minimize risk of high sinkage and slippage during drives;
Better understand soil properties and rover terramechanics from drive data;
Diagnose rover mobility issues.
The team developed and utilized dynamic computer-based models for rover drives
over realistic terrains. The tool, named ARTEMIS (Adams-based Rover
Terramechanics and Mobility Interaction Simulator), is a dynamic modeling tool to
simulate the movement of a rigid wheeled rover over planetary surfaces:
•A dynamic rover model is created in Adams/View with 200-element, 428
degrees of freedom, associated with 85 individual parts or rigid bodies;
•It is based on the classical terramechanics expressions to model the wheel-
soil interaction.
•Surface modeling is based on digital elevation model derived from stereo
Navcam and Pancam images taken by Opportunity rover.
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
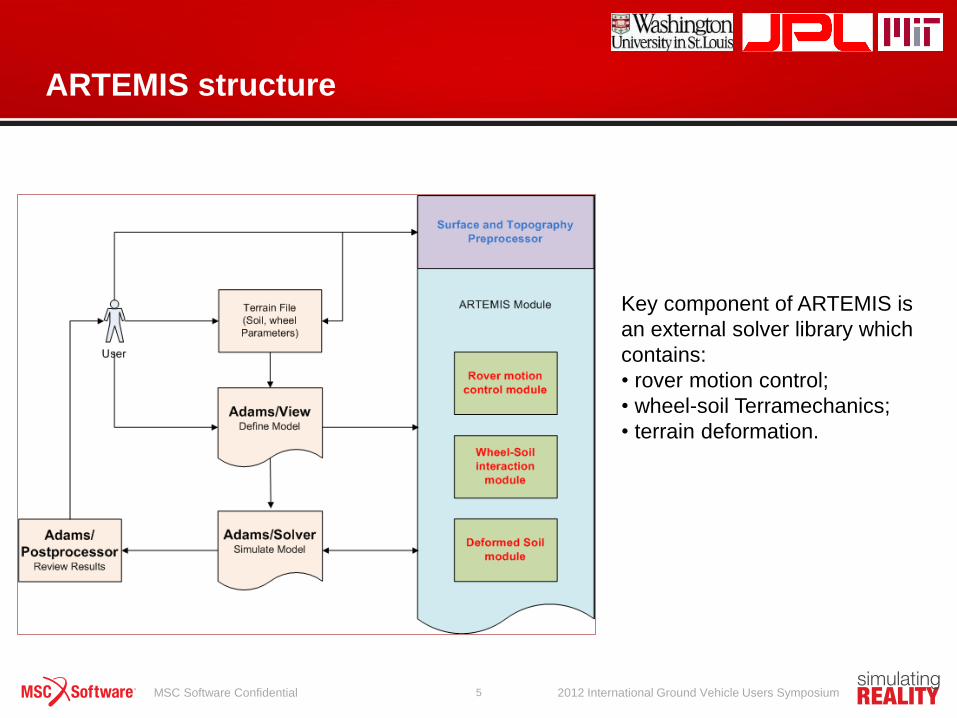
ARTEMIS structure
5
Key component of ARTEMIS is
an external solver library which
contains:
• rover motion control;
• wheel-soil Terramechanics;
• terrain deformation.
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity’s real drive
6
Opportunity has three standard drive commands:
• straight drive;
• arc-turn;
• turn-in-place.
Also Opportunity has two basic types of drives:
• Blind drive;
• Autonav with visodom;
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Visodom
7
What: Visodom is the way the rover makes use of camera-based Visual Odometry
(visodom) to correct the errors in the initial wheel odometry based estimate that
occur when the wheels lose traction on large rocks and steep slopes. In other word,
rover odometry data needs to be corrected to remove the effect of rover slippage.
How: The rover visual odometry system computes rover pose (x,y,z, roll, pitch,
yaw) by tracking the motion of “interesting’’ terrain features between two pairs of
stereo images in both two-dimensional (2-D) pixel coordinates and three
dimensional (3-D) world coordinates. A maximum likelihood estimator applied to the
computed 3-D offsets produces the final motion estimate.
Why: Visodom not only improves rover safety but also increases science return.
Ref: Cheng, Y., Maimone, M., Matthies, L. (2006). Visual Odometry on the Mars Exploration Rovers. IEEE Robotics and Automation
Magazine 13 (2): 54–62. doi:10.1109/MRA.2006.1638016.
Maimone, M., Biesiadecki, J., Tunstel, E., Cheng, Y., Leger C. (2006). Surface navigation and mobility intelligence on the Mars
Exploration Rovers. Intelligence for Space Robotics, TSI Press, San Antonio, TX, USA, chapter 3, 2006, march 2006, 45-69
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
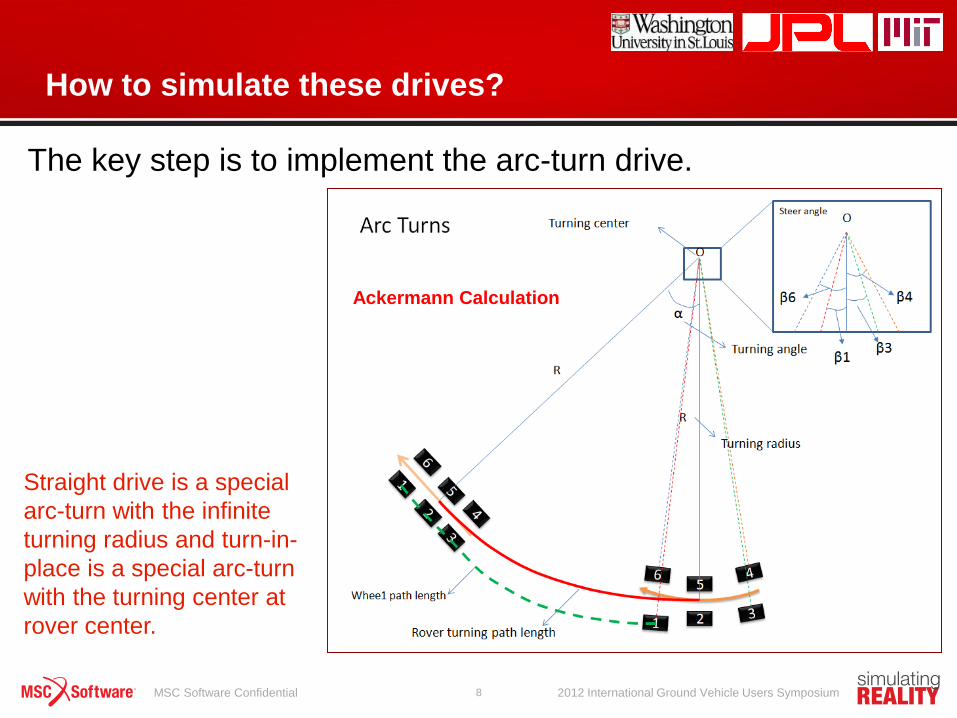
How to simulate these drives?
8
The key step is to implement the arc-turn drive.
Straight drive is a special
arc-turn with the infinite
turning radius and turn-in-
place is a special arc-turn
with the turning center at
rover center.
Ackermann Calculation

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
How to implement in ARTEMIS?
9
loop
Drive command simulation is implemented through the customized MOTSUB
in Adams/Solver.

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Sample drives simulation
10
Simulating forward, 5m, and 30 deg arc-turn in ARTEMIS

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Sample drives simulation
11
Simulating blind drive with 50cm step size, backward, 5m, and 30 deg arc-turn

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Sample drives simulation
12
Simulating visodom drive with 50cm step size, backward, 5m, and 30 deg arc-turn

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2143 drive simulation: overview
13
vertical exaggeration =5.0
A:
2m backup straight;
B:
6 steps arc-turn, 15
deg and 0.2m each
step;
C:
visodom backward to
waypoint (13 steps,
50cm step size).

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2143 drive simulation
14
Soil region determination:
multiple soil regions for terramechanics calculation

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2143 drive simulation
15

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2143 drive simulation
16
3D slip comparison between telemetry report and simulated results

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2143 drive simulation
17
Rover pitch comparison

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2143 drive simulation
18
Edge profile line
Rut profile line
Note: The elevation is based on Opportunity site
frame. Its positive direction is pointing down.
Sinkage comparison
Digital elevation model

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
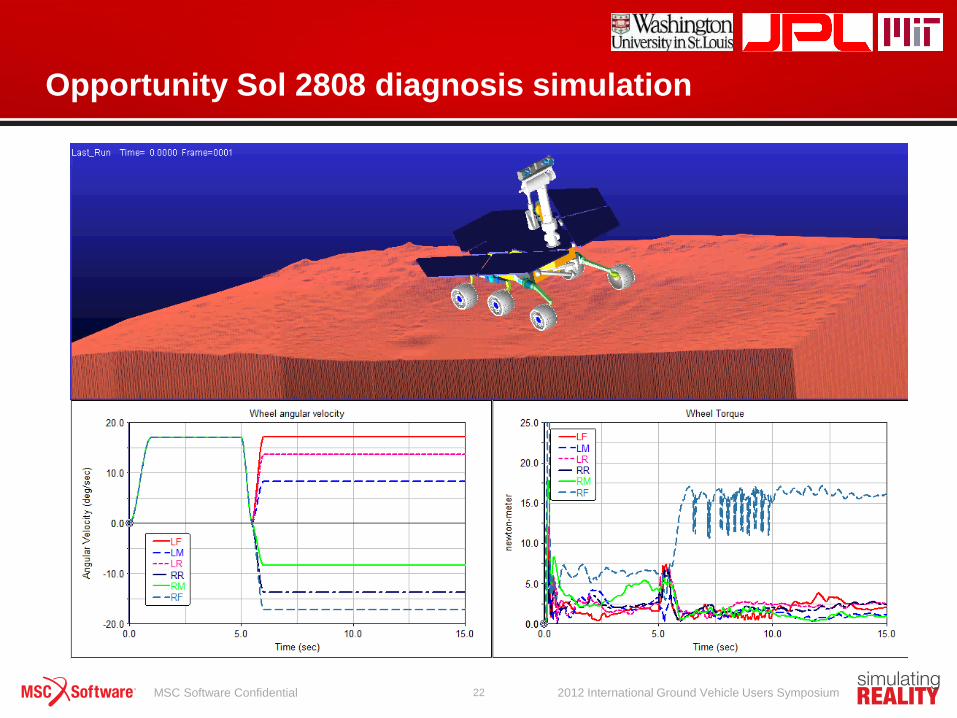
Opportunity Sol 2808~2816 diagnosis simulation
19
•Turn-in-place on sol 2808 stopped because of high current (high
torque) on RF wheel drive actuator. To diagnose this situation, an
Artemis dynamical model for Opportunity with stick-slip rheology for
irregular bedrock was used to simulate this drive.
•Sol 2808 modeled as straight drive followed by turn-in-place with fixed
8 deg in-board rotated RF wheel using drive commands sent to
Opportunity.
•Topography was modeled from digital elevation model derived from
NavCam images.
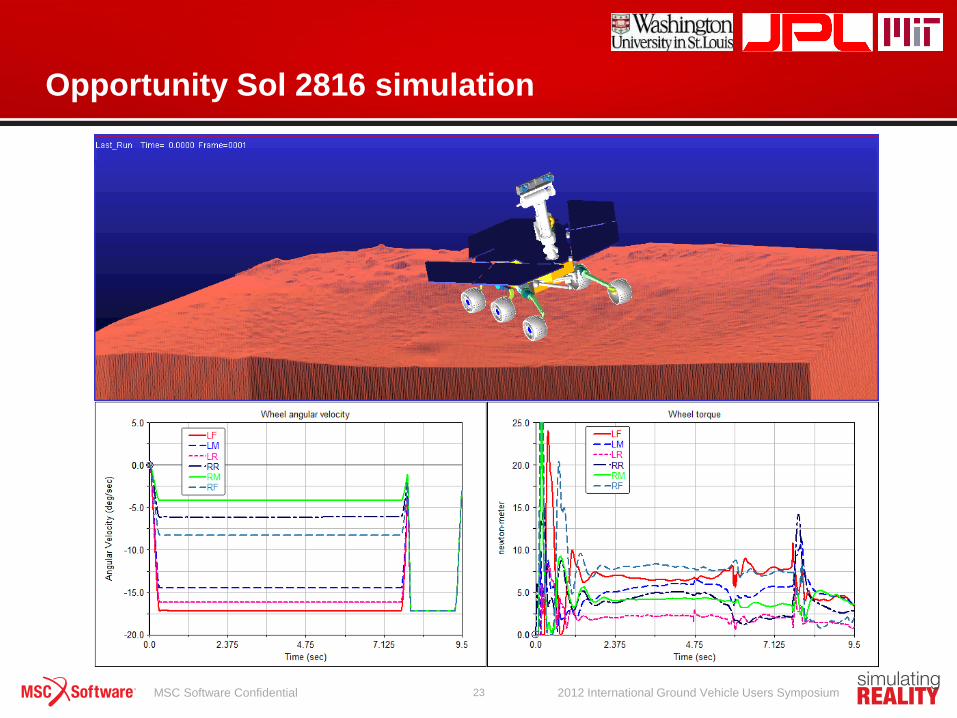
•To continue this diagnosis, Sol 2816 backwards drives (15 cm 10°arc
and 5 cm straight drive segments) also modeled as a comparison.

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2808 diagnosis simulation
20

MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2808 diagnosis simulation
21
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2808 diagnosis simulation
22
MSC Software Confidential 2012 International Ground Vehicle Users Symposium
Opportunity Sol 2816 simulation
23