Embed Size (px)
Citation preview

Semiparametric Estimation of Fixed E�ects Panel Data Varying
Coe�cient Models
Yiguo SunDepartment of Economics, University of Guelph
Guelph, ON, Canada N1G2W1
Raymond J. CarrollDepartment of Statistics, Texas A&M University
College Station, TX 77843-3134, USA
Dingding LiDepartment of Economics, University of Windsor
Windsor, ON, Canada N9B3P4
April 2, 2009
Abstract
We consider the problem of estimating a varying coe�cient panel data model with �xede�ects using a local linear regression approach. Unlike �rst-di�erenced estimator, our proposedestimator removes �xed e�ects using kernel-based weights. This results a one-step estimatorwithout using back-�tting technique. The computed estimator is shown to be asymptoticallynormally distributed. A modi�ed least-squared cross-validatory method is used to select theoptimal bandwidth automatically. Moreover, we propose a test statistic for testing the nullhypothesis of a random e�ects against a �xed e�ects varying coe�cient panel data model.Monte Carlo simulations show that our proposed estimator and test statistic have satisfactory�nite sample performance.
Key words: Consistent test; Fixed e�ects; Panel data; Varying coe�cients model.

1 INTRODUCTION
Panel data traces information on each individual unit across time. Such two-dimensional infor-
mation set enables researchers to estimate complex models and extract information and inferences
which may not be possible using pure time-series data or cross-section data. With the increased
availability of panel data, both theoretical and applied work in panel data analysis have become
more popular in the recent years.
Arellano (2003), Baltigi (2005), and Hsiao (2003) provide excellent overview of parametric panel
data model analysis. However, it is well known that a misspeci�ed parametric panel data model may
give misleading inferences. To avoid imposing the strong restrictions assumed in the parametric
panel data models, econometricians and statisticians have worked on theories of nonparametric
and semiparametric panel data regression models. For example, Henderson, Carroll, and Li (2008)
considered the �xed-e�ects nonparametric panel data model. Henderson and Ullah (2005), Lin and
Carroll (2000, 2001, 2006), Lin, Wang, Welsh and Carroll (2004), Lin and Ying (2001), Ruckstuhl,
Welsh and Carroll (1999), Wang (2003), and Wu and Zhang (2002) considered the random-e�ects
nonparametric panel data models. Li and Stengos (1996) considered a partially linear panel data
model with some regressors being endogenous via IV approach, and Su and Ullah (2006) investigated
a �xed-e�ects partially linear panel data model with exogenous regressors.
A purely nonparametric model su�ers from the `course of dimensionality' problem; while a
partially linear semiparametric model may be too restrictive as it only allows for some additive
nonlinearities. The varying coe�cient model considered in this paper includes both pure non-
parametric model and partially linear regression model as special cases. Moreover, we assume a
�xed-e�ects panel data model. By �xed e�ects we mean that the individual e�ects are correlated
with the regressors in an unknown way. Consistent with the well-known results in parametric panel
data model estimation, we show that random e�ects estimators are inconsistent if the true model
is one with �xed e�ects and that �xed e�ects estimators are consistent under both random and
�xed e�ects panel data model, although the random e�ects estimator is more e�cient than the
�xed e�ects estimator when the random e�ects model holds true. Therefore, estimation of random
e�ects models is appropriate only when individual e�ects are uncorrelated with regressors. As in
practice, economists often view the assumptions required for the random e�ects model as being
1

unsupported by the data, this paper emphasizes more on estimating a �xed e�ects panel data vary-
ing coe�cient model, and we propose to use the local linear method to estimate unknown smooth
coe�cient functions. We also propose a test statistic for testing a random e�ects against a �xed
e�ects varying coe�cient panel data model. Simulation results show that our proposed estimator
and test statistic have satisfactory �nite sample performances.
Recently, Cai and Li (2008) studied a dynamic nonparametric panel data model with unknown
varying coe�cients. As Cai and Li (2008) allow the regressors not appearing in the varying coe�-
cient curves to be endogenous, the GMM-based IV estimation method plus local linear regression
approach is used to deliver consistent estimator of the unknown smooth coe�cient curves. In this
paper, all the regressors are assumed to be exogenous. Therefore, the least-squared method com-
bining with local linear regression approach can be used to produce consistent estimator of the
unknown smoothing coe�cient curves. In addition, the asymptotic results are given when the time
length is �nite.
The rest of the paper is organized as follows. In section 2 we set up the model and discuss
transformation methods that are used to remove �xed e�ects. Section 3 proposes a nonparametric
�xed e�ects estimator and studies its asymptotic properties. In section 4 we suggest a statistic
for testing the null hypothesis of a random e�ects against a �xed e�ects varying coe�cient model.
Section 5 reports simulation results that examine the �nite sample performance of our semipara-
metric estimator and the test statistic. Finally we concludes the paper in section 6. The proofs of
the main results are collected in an Appendix.
2 FIXED-EFFECTS VARYING COEFFICIENT PANEL DATA
MODELS
We consider the following �xed-e�ects varying coe�cient panel data regression model
Yit = X>it �(Zit) + �i + �it; (i = 1; :::; n; t = 1; :::;m) (1)
where the covariate Zit = (Zit;1; :::; Zit;q)> is of dimension q, Xit = (Xit;1; :::; Xit;p)> is of dimension
p; �(�) = f�1(�); � � � ; �p(�)g> contains p unknown functions, and all other variables are scalars. None
of the variables in Xit can be obtained from Zit and vice versa. The random errors vit are assumed
to be i.i.d. with a zero mean, �nite variance �2v > 0 and independent of �j , Zjs, and Xjs for all i, j,
2
s and t. The unobserved individual e�ects �i are assumed to be i.i.d. with a zero mean and a �nite
variance �2� > 0. We allow for �i to be correlated with Zit and/or Xit with an unknown correlation
structure. Hence, model (1) is a �xed-e�ects model. Alternatively, when �i is uncorrelated with
Zit and Xit, model (1) becomes a random-e�ects model.
A somewhat simplistic explanation for consideration of �xed e�ects models and the need for
estimation of the function �(�) arises from considerations such as the following. Suppose that Yit is
the (logarithm) income of individual i at time period t, and Xit is education of individual i at time
period t , e.g., number of years of schooling; and Zit is the age of individual i at time t. The �xed
e�ects term �i in (1) includes the individual's unobservable characteristics such as ability, e.g., IQ
level, characteristics which are not observable for the data at hand. In this problem, economists
are interested in the marginal e�ects of education on income, after controlling for the unobservable
individual ability factors. Hence, they are interested in the marginal e�ects in the income change
for an additional year of education regardless of whether the person has high or low ability. In this
simple example, it is reasonable to believe that ability and education are positively correlated. If
one does not control for the unobserved individual e�ects, then one would over-estimate the true
marginal e�ects of education on income (i.e., with an upwards bias).
When Xit � 1 for all i and t and p = 1, model (1) reduces to Henderson, Carroll, and Li's
(2008) nonparametric panel data model with �xed e�ects as a special case. One may also interpret
X>it �(Zit) as an interactive term between Xit and Zit where we allow �(Zit) to have a exible format
since the popularly used parametric setup such as Zit and/or Z2it may be misspeci�ed.
For a given �xed e�ects model, there are many ways of removing the unknown �xed e�ects from
the model.
The usual �rst-di�erenced (FD) estimation method deducts one equation from another to re-
move the time-invariant �xed e�ects. For example, deducting equation for time t from that for
time t� 1; we have for t = 2; � � � ;m
eYit = Yit � Yit�1 = X>it �(Zit)�X>
it�1�(Zit�1) + evit; with evit = vit � vit�1; (2)
or deducting equation for time t from that for time 1; we obtain for t = 2; � � � ;m
eYit = Yit � Yi1 = X>it �(Zit)�X>
i1�(Zi1) + evit; with evit = vit � vi1: (3)
3

The conventional �xed-e�ects (FE) estimation method, on the other hand, removes the �xed
e�ects by deducting each equation from the cross-time average of the system, and it gives for
t = 2; � � � ;m
eYit = Yit �1
m
mXs=1
Yis = X>it �(Zit)�
1
m
mXs=1
X>is�(Zis) + evit
=
mXs=1
qtsX>is�(Zis) + evit with ~vit = vit � 1
m
Pms=1 vis (4)
where qts = �1=m if s 6= t and 1� 1=m otherwise, andPms=1 qts = 0 for all t.
Many nonparametric local smoothing methods can be used to estimate the unknown function
�(�). However, for each i, the right-hand sides of equations (2)-(4) contain linear combination of
X>it �(Zit) for di�erent time t. If Xit contains a time-invariant term, say the �rst component of
Xit, and let �1(Zit) denote the �rst component of �(Zit), then a �rst di�erence of Xit;1�1(Zit) �
Xi;1�1(Zit) gives Xi;1 (�1(Zit)� �1(Zi;t�1)), which is an additive function with the same function
form for the two functions but evaluated at di�erent observation points. Kernel based estimator
usually requires some back�tting algorithms to recover the unknown function, which will su�er the
common problems as indicated in estimating nonparametric additive model. Moreover, if �1(Zit)
contains an additive constant term, say �(Zit) = c + g1(Zit), where c is a constant, then the �rst
di�erence will wipe out the additive constant c. As a consequence, one cannot consistently estimate
�1(�) one were to estimate a �rst-di�erenced model in general (if Xi;1 � 1, one can recover c by
averaging Yit �X>it �(Zit) for all cross sections and across time).
Therefore, in this paper we consider an alternative way of removing the unknown �xed e�ects,
motivated by a least squares dummy variable (LSDV) model in parametric panel data analysis. We
will describe how the proposed method removes �xed e�ects by deducting a smoothed version of
cross-time average from each individual unit. As we will show later, this transformation method will
not wipe the additive constant c in �1(Zit) = c + g1(Zit). Therefore, we can consistently estimate
�1(�) as well as other components of �(�) when at most one of the variables in Xit is time invariant.
We will use In to denote an identity matrix of dimension n, and em to denote an m� 1 vector
with all elements being ones. Rewriting model (1) in a matrix format yields
Y = BfX; �(Z)g+D0�0 + V; (5)
4
where Y = (Y >1 ; � � � ; Y >n )> and V = (v>1 ; � � � ; v>n )> are (nm) � 1 vectors; Y >i = (Yi1; :::; Yin) and
v>i = (vi1; :::; vin). BfX; �(Z)g stacks all X>it �(Zit) into an (nm)� 1 vector with the (i; t) subscript
matching that of the (nm)�1 vector of Y ; �0 = (�1; � � � ; �n)> is an n�1 vector, and D0 = Inem
is an (nm) � n matrix with main diagonal blocks being em, where refers to Kronecker product
operation. However, we can not estimate model (5) directly due to the existence of the �xed e�ects
term. Therefore, we need some identi�cation conditions. Su and Ullah (2006) assumePni=1 �i = 0.
We show that assuming an i.i.d sequence of unknown �xed e�ects, �i, with zero mean and a �nite
variance is enough to identify the unknown coe�cient curves asymptotically. We therefore impose
this weaker version of identi�cation condition in this paper.
To introduce our estimator, we �rst assume that model (1) holds with the restrictionPni=1 �i = 0
(note that we do not impose this restriction for our estimator, and this restriction is added here
for motivating our estimator). De�ne � = (�2; � � � ; �n)>: We then rewrite (5) as
Y = BfX; �(Z)g+D�+ V; (6)
where D = [�en�1 In�1]> em is an (nm) � (n � 1) matrix. Note that D� = �0 em with
�0 = (�Pni=2 �i; �2; :::; �n)
> so that the restrictionPni=1 �i = 0 is imposed in (6).
De�ne anm�m diagonal matrix KH(Zi; z) = diagfKH(Zi1; z); � � � ;KH(Zim; z)g for each i; and
a (nm) � (nm) diagonal matrix WH(z) = diagfKH(Z1; z); � � � ; KH(Zn; z)g, where KH(Zit; z) =
KfH�1(Zit � z)g for all i and t; and H = diag(h1; � � � ; hq) is a q � q diagonal bandwidth matrix.
We then solve the following optimization problem
min�(Z);�
[Y �BfX; �(Z)g �D�]>WH(z)[Y �BfX; �(Z)g �D�]; (7)
where we use the local weight matrix WH(z) to ensure locality of our nonparametric �tting, and
place no weight matrix for data variation since the fvitg are i.i.d. across equations. Taking �rst-
order condition with respect to � gives
D>WH(z)[Y �BfX; �(Z)g �Db�(z)] = 0; (8)
which yields
b�(z) = fD>WH(z)Dg�1D>WH(z)[Y �BfX; �(Z)g]: (9)
5

De�ne SH(z) = MH(z)>WH(z)MH(z) and MH(z) = In�m � DfD>WH(z)Dg�1D>WH(z),
where In�m denotes an identity matrix of dimension nm by nm. Replacing � in (7) by b�(z), weobtain the concentrated weighted least squares
min�(Z)
[Y �BfX; �(Z)g]>SH(z)[Y �BfX; �(Z)g]; (10)
Note that MH(z)D� � 0(nm)�1 for all z. Hence, the �xed e�ects term � is removed in model (10).
To see how MH(z) transforms the data, simple calculations give
MH(z) = In�m �DfA�1 �A�1en�1e>n�1A�1=nXi=1
cH(Zi; z)gD>WH(z);
where cH(Zi; z)�1 =
Pmt=1KH(Zit; z) for i = 1; � � � ; n andA = diagfcH(Z2; z)�1; : : � � � ; cH(Zn; z)�1g.
We use the formula (A + BCD)�1 = A�1 � A�1B(DA�1B + C�1)�1DA�1 to derive the inverse
matrix, see Appendix B in Poirier (1995).
3 NONPARAMETRIC ESTIMATORANDASYMPTOTIC THE-
ORY
A local linear regression approach is commonly used to estimate non-/semi-parametric models.
The basic idea of this method is to apply Taylor expansion up to the second-order derivative.
Throughout the paper we will use the notation that An � Bn to denote that Bn is the leading term
of An, i.e., An = Bn+(s:o:), where (s:o:) denotes terms having probability order smaller than that
of Bn. For each l = 1; � � � ; p; we have the following Taylor expansion around z:
�l(zit) � �l(z) + fH�0l(z)g>[H�1(zit � z)] +1
2rH;l(zit; z); (11)
where �0l(z) = @�l(z)=@z is the q�1 vector of the �rst order derive function, rH;l(zit; z) = fH�1(zit�
z)g>fH @2�l(z)@z@z>
HgfH�1(zit�z)g: Of course, �l(z) approximates �l(zit) and �0l(z) approximates �0l(zit)
when zit is close to z: De�ne �l(z) = f�l(z); [H�0l(z)]>g>; a (q + 1) � 1 column vector for l =
1; 2; � � � ; p; and �(z) = f�1(z); � � � ; �p(z)g>, a p � (q + 1) parameter matrix. The �rst column
of �(z) is �(z): Therefore, we will replace �(Zit) in (1) by �(z)Git(z;H) for each i and t; where
Git(z;H) = [1; fH�1(Zit � z)g>]> is a (q + 1)� 1 vector.
To make matrix operations simpler, we stack the matrix �(z) into a p(q+1)� 1 column vector
and denote it by vecf�(z)g . Since vec(ABC) = (C>A)vec(B) and (AB)> = A>B>; where
6

refers to Kronecker product, we have X>it �(z)Git(z;H) = fGit(z;H) Xitg>vecf�(z)g for all i
and t. Thus, we consider the following minimization problem
min�(z)
[Y �R(z;H)vecf�(z)g]>SH(z)[Y �R(z;H)vecf�(z)g] (12)
where
Ri(z;H) =
264 (Gi;1(z;H)Xi1)>...
(Gi;m(z;H)Xim)>
375 is an m� [p(q + 1)] matrix,
R(z;H) = [R1(z;H)>; � � � ; Rn(z;H)>]> is an (nm)� [p(q + 1)] matrix.
Simple calculations give
vecfb�(z)g = fR(z;H)>SH(z)R(z;H)g�1R(z;H)>SH(z)Y
= vecf�(z)g+ fR(z;H)>SH(z)R(z;H)g�1(An=2 +Bn + Cn); (13)
where An = R(z;H)>SH(z)�(z;H), Bn = R(z;H)>SH(z)D0�0, and Cn = R(z;H)>SH(z)V:
The ft + (i � 1)mgth element of the column vector �(z;H) is X>it rH(
eZit; z); where rH(�; �) =frH;1(�; �); � � � ; rH;p(�; �)g> and rH;l( eZit; z) = fH�1(Zit�z)g>fH @2�l( eZit)
@z@z>HgfH�1(Zit�z)g with eZit
lying between Zit and z for each i and t. Both An and Bn contribute to the bias term of the
estimator. Also, ifPni=1 �i = 0 holds true, Bn = 0; if we only assume �i being iid with zero mean
and �nite variance, the bias due to the existence of unknown �xed e�ects can be asymptotically
ignored.
To derive the asymptotic distribution of vecfb�(z)g, we �rst give some regularity conditions.Throughout this paper, we use M > 0 to denote a �nite constant, which may take a di�erent value
at di�erent places.
Assumption 1: The random variables (Xit; Zit) are independently and identically distributed
(i.i.d.) across the i index, and
(a) EkXitk2(1+�) �M <1 and EkZitk2(1+�) �M <1 hold for some � > 0 and for all i and t.
(b) The Zit are continuous random variables with a p.d.f. ft(z). Also, for each z 2 Rq,
f (z) =Pmt=1 ft (z) > 0.
(c) Denote �it = KH(Zit; z) and $it = �it=Pmt=1 �it 2 (0; 1) for all i and t. (z) = jHj
�1Pmt=1
E�(1�$it)�itXitXT
it
�is a nonsingular matrix.
7

(d) Let ft (zjXit) be the conditional pdf of Zit at Zit = z conditional onXit and ft;s (z1; z2jXit; Xjs)
be the joint conditional pdf of (Zit; Zjs) at (Zit; Zjs) = (z1; z2) conditional on (Xit; Xjs) for t 6= s
and any i and j. Also, � (z), ft (z), ft (�jXit), ft;s (�; �jXit; Xjs) are uniformly bounded in the domain
of Z and are all twice continuously di�erentiable at z 2 Rq for all t 6= s, i and j.
Assumption 2: BothX and Z have full column rank; fXit;1; :::; Xit;p; fXit;lZit;j : l = 1; :::; p; j =
1; :::; qgg are linearly independent. If Xit;l � Xi;l for at most one l 2 f1; � � � ; pg, i.e., Xi;l does not
depend on t, we assume E(Xi;l) 6= 0: The unobserved �xed e�ects �i are i.i.d. with zero mean and
a �nite variance �2� > 0. The random errors vit are assumed to be i.i.d. with a zero mean, �nite
variance �2v and independent of Zit and Xit for all i and t. Yit is generated by equation (1).
If Xit contains a time invariant regressor, say the lth component of Xit is Xit;l = Wi. Then
the corresponding coe�cient �l(�) is estimable if MH(z)(W em) 6= 0 for a given z, where W =
(W1; :::;Wn)>. Simple calculations give MH(z)(W em) = (n�1
Pni=1Wi)MH(z) �(en em). The
proof of Lemma A.2 in Appendix 7.1 can be used to show that MH(z)(en em) 6= 0 for any
given z with probability one. Therefore, �l(�) is asymptotically identi�able if n�1Pni=1Xit;l �
n�1Pni=1Wi 9 0 while ��
a:s:! 0. For example, if Xit contains a constant, say, Xit;1 =Wi � 1; then
�1(�) is estimable because n�1Pni=1Wi = 1 6= 0.
Assumption 3: K(v) =Qqs=1 k(vs) is a product kernel, and the univariate kernel function
k(�) is a uniformly bounded, symmetric (around zero) probability density function with a compact
support [�1; 1]. In addition, de�ne jHj = h1 � � �hq and kHk =qPq
j=1 h2j : As n ! 1, kHk ! 0,
njHj ! 1.
The assumptions listed above are regularity assumptions commonly seen in nonparametric es-
timation literature. Assumption 1 apparently excludes the case of either Xit or Zit being I(1);
other than the moment restrictions, we do not impose I(0) structure on Xit across time, since
this paper considers the case that m is a small �nite number. Also, instead of imposing the
smoothness assumption on ft (�jXit) and ft;s (�; �jXit; Xis) as in Assumption 1(d), we can assume
that ft (z)E�XitX
Tit jz�and ft;s (z1; z2)E
�XitX
Tjsjz1; z2
�are uniformly bounded in the domain of
Z and are all twice continuously di�erentiable at z 2 Rq for all t 6= s and i and j. Our version of
the smoothness assumption simpli�es our notation in the proofs.
Assumption 2 indicates that Xit can contain a constant term of ones. The kernel function
8

having a compact support in Assumption 3 is imposed for the sake of brevity of proof and can be
removed at the cost of lengthy proofs. Speci�cally, the Gaussian kernel is allowed.
We use b�(z) to denote the �rst column of b�(z). Then �(z) estimates �(z).THEOREM 3.1 Under Assumptions 1-3, we obtain the following bias and variance for b�(z),given a �nite integer m > 0:
bias(b�(z)) = (z)�1 � (z) =2 +O�n�1=2 jHj ln (lnn)
�+ o(kHk2);
var(b�(z)) = n�1jHj�1�2v(z)�1 � (z) (z)�1 + o(n�1jHj�1);
where (z) = jHj�1Pmt=1 E
�(1�$it)�itXitXT
it
�, � (z) = jHj�1
Pmt=1E
h(1�$it)�itXitXT
it rH
�~Zit; z
�i= O
�kHk2
�, and � (z) = jHj�1
Pmt=1E
h(1�$it)2 �2itXitXT
it
i.
The �rst term of bias(b�(z)) results from the local approximation of � (z) by a linear function of
z, which is of order O�kHk2
�as usual. The second term of bias(b�(z)) results from the unknown
�xed e�ects �i: (a) if we assumedPni=1 �i = 0, this term is zero exactly; (b) the result indicates
that the bias term is dominated by the �rst term and will vanish as n!1.
In Appendix, we show that
jHj�1mXt=1
E��itXitX
Tit
�= �(z) + o(kHk2),
jHj�1mXt=1
Eh�itXitX
Tit rH
�~Zit; z
�i= �2� (z)�H (z) + o(kHk2),
jHj�1mXt=1
E��2itXitX
Tit
�=
�ZK2 (u) du
�� (z) + o(kHk2),
where �2 =Rk (v) v2dv, � (z) =
Pmt=1 ft (z)E
�X1tX
T1tjz�, and �H (z) =
htr�H @2�1(z)
@z@zTH�; � � � ;
tr�H@2�p(z)@z@zT
H�iT
. Since $it 2 [0; 1) for all i and t, the results above imply the existence of (z),
� (z), and � (z). However, given a �nite integer m > 0, we can not obtain explicitly the asymptotic
bias and variance due to the random denominator appearing in $it.
Further, the following Theorem gives the asymptotic normality results for b�(z).
9

THEOREM 3.2 Under Assumptions 1-3, and assuming in addition that Ejvitj2+� <1 for some
� > 0, and thatpnjHjkHk2 = O (1) as !1, we havep
njHjfb�(z)� �(z)�(z)�1 � (z) =2g d! N(0;��(z));
where ��(z) = �2v limn!1(z)
�1 � (z) (z)�1. Moreover, a consistent estimator for ��(z) is given
as follows:
b��(z) = Spb(z;H)�1 bJ(z;H)b(z;H)�1S>p p! ��(z);b(z;H) = n�1jHj�1R(z;H)>SH(z)R(z;H)bJ(z;H) = n�1jHj�1R(z;H)>SH(z)bV bV >SH(z)R(z;H)where bV is the vector of estimated residuals and Sp includes the �rst p rows of the p(q+1) identify
matrix. Finally, a consistent estimator for the leading bias can be easily obtained based on a
nonparametric local quadratic regression result.
4 TESTING RANDOM EFFECTS VERSUS FIXED EFFECTS
In this section we discuss how to test for the presence of random e�ects versus �xed e�ects in
a semiparametric varying coe�cient panel data model. The model remains as (1). The random
e�ects speci�cation assumes that �i is uncorrelated with the regressors Xit and Zit, while for the
�xed e�ects case, �i is allowed to be correlated with Xit and/or Zit in an unknown way.
We are interested in testing the null hypothesis (H0) that �i is a random e�ect versus the
alternative hypothesis (H1) that �i is a �xed e�ect. The null and alternative hypotheses can be
written as
H0 : PrfE(�ijZi1; :::; Zim; Xi1; � � � ; Xim) = 0g = 1 for all i, (14)
H1 : PrfE(�ijZi1; :::; Zim; Xi1; � � � ; Xim) 6= 0g > 0 for some i , (15)
while we keep the same setup given in model (1) under both H0 and H1.
Our test statistic is based on the squared di�erence between the FE and RE estimators, which
is asymptotically zero under H0 and positive under H1: To simplify the proofs and save computing
time, we use local constant estimator instead of local linear estimator for constructing our test.
10

Then following the argument in Section 2 and Appendix 7.2, we have
b�FE(z) = fX>SH(z)Xg�1X>SH(z)Yb�RE(z) = fX>WH(z)Xg�1X>WH(z)Y
where X is a (nm)�p matrix with X = (X>1 ; � � � ; X>
n ); and for each i, Xi = (Xi1; � � � ; Xim)> is an
m� p matrix with Xit = [Xit;1; � � � ; Xit;p]>: Motivated by Li, et al. (2002), we remove the random
denominator of b�FE(z) by multiplying X>SH(z)X and our test statistic will be based on
Tn =
Zfb�FE(z)� b�RE(z)g>fX>SH(z)Xg>fX>SH(z)Xgfb�FE(z)� b�RE(z)gdz
=
Z eU(z)>SH(z)XX>SH(z)eU(z)dzsince fX>SH(z)Xgfb�FE(z)�b�RE(z)g = X>SH(z)fY �Xb�RE(z)g � X>SH(z)eU(z): To simplify thestatistic, we make several changes in Tn. Firstly, we simplify the integration calculation by replacingeU(z) by bU , where bU � bU(Z) = Y � BfX; b�RE(Z)g and BfX; b�RE(Z)g stacks up X>
itb�RE(Zit) in
the increasing order of i �rst then of t: Secondly, to overcome the complexity caused by the random
denominator in MH(z), we replace MH(z) by MD = In�m �m�1In (eme>m) such that the �xed
e�ects can be removed due to the fact that MDD0 = 0. With the above modi�cation and also
removing the i = j terms in Tn (since Tn contains two summationsPi
Pj), our further modi�ed
test statistic is given by
eTn def= nXi=1
Xj 6=i
bU>i Qm Z KH(Zi; z)X>i XjKH(Zj ; z)dzQm
bUj ;where Qm = Im �m�1eme>m: If jHj ! 0 as n!1, we obtain
jHj�1ZKH(Zi; z)X
>i XjKH(Zj ; z)dz (16)
=
264�KH(Zi;1; Zj;1)X
>i;1Xj;1 � � � �KH(Zi;1; Zj;m)X
>i;1Xj;m
.... . .
...�KH(Zi;m; Zj;1)X
>i;mXj;1 � � � �KH(Zi;m; Zj;m)X
>i;mXj;m
375 ,where �KH(Zit; Zjs) =
RKfH�1(Zit�Zjs)+!gK(!)d!. We then replace �KH(Zit; Zjs) byKH(Zit; Zjs);
this replacement will not a�ect the essence of the test statistic since the local weight is untouched.
Now, our proposed test statistic is given by
bTn = 1
n2jHj
nXi=1
nXj 6=i
bU>i QmAi;jQm bUj (17)
11

whereAi;j equals to the right-hand side of equation (16) after replacing �KH(Zit; Zjs) byKH(Zit; Zjs).
Finally, to remove the asymptotic bias term of the proposed test statistic, we calculate the leave-
one-unit-out random-e�ects estimator of �(Zit); that is, for a given pair of (i; j) in the double
summation of (17) with i 6= j, b�RE(Zit) is calculated without using the observations on the jth-unit, f(Xjt; Zjt; Yjt)gmt=1 and b�RE(Zjt) is calculated without using the observations on the ith-unit.
We present the asymptotic properties of this test below and delay the proofs to Appendix 7.3.
THEOREM 4.1 Under Assumptions 1-3, and ft (z) has a compact support S for all t, and
npjHj kHk4 ! 0 as n!1, then we have under H0 that
Jn = npjHj bTn=b�0 d! N(0; 1) (18)
where b�20 = 2n2jHj
Pni=1
Pnj 6=i(
bV >i QmAi;jQm bVj)2 is a consistent estimator of�20 = 4(1� 1=m)2�4v
ZK2(u)du
mXt=2
t�1Xs=1
Ehft(Z1s)(X
>1sX2t)
2i,
where bVit = Yit � X>itb�FE(Zit) � b�i and for each pair of (i; j), i 6= j, b�FE(Zit) is a leave-two-
unit-out FE estimator without using the observations from the ith and jth units and b�i = �Yi �
m�1Pmt=1X
>itb�FE(Zit). Under H1, Pr[Jn > Bn] ! 1 as n ! 1, where Bn is any nonstochastic
sequence with Bn = o(npjHj).
Assuming that ft (z) has a compact support S for all t is to simplify the proof of supz2S jjb�RE(z)�� (z) jj = op (1) as n ! 1; otherwise, some trimming procedure has to be placed to show the
uniform convergence result and the consistency of b�20 as an estimator of �20. Theorem 4.1 states
that the test statistic Jn = npjHj bTn=b�0 is a consistent test for testing H0 against H1. It is a
one-sided test. If Jn is greater than the critical values from the standard normal distribution, we
reject the null hypothesis at the corresponding signi�cance levels.
5 MONTE CARLO SIMULATIONS
In this section we report some Monte Carlo simulation results to examine the �nite sample perfor-
mance of the proposed estimator. The following data generating process is used:
Yit = �1(Zit) + �2(Zit)Xit + �i + vit; (19)
12
where �1(z) = 1 + z + z2, �2(z) = sin(z�), Zit = wit + wi;t�1, wit is i.i.d. uniformly distributed in
[0; �=2], Xit = 0:5Xi;t�1 + �it, �it is i.i.d. N(0; 1). In addition, �i = c0 �Zi� + ui for i = 2; � � � ; n with
c0 = 0; 0:5; and 1.0, ui is i.i.d. N(0; 1):When c0 6= 0, �i and Zit are correlated; we use c0 to control
the correlation between �i and �Zi� = m�1Pmt=1 Zit. Moreover, vit is i.i.d. N(0; 1), wit, �it, ui and
vit are independent of each other.
We report estimation results for both the proposed �xed-e�ects (FE) estimator and the random-
e�ects (RE) estimator, see Appendix 7.2 for the asymptotic results of the RE estimator. To learn
how the two estimators perform when we have �xed-e�ects model and when we have random-e�ects
model, we use the integrated squared error as a standard measure of estimation accuracy:
ISE(b�l) = Z fb�l(z)� �l(z)g2f(z)dz; (20)
which can be approximated by the average mean squared error
AMSE(b�l) = (nm)�1 nXi=1
mXt=1
[b�l(Zit)� �l(Zit)]2for l = 1; 2. In Table 1 we present the average value of AMSE(b�l) from 1000 Monte Carlo
experiments. We choose m = 3 and n = 50, 100, and 200.
Since the bias and variance of the proposed FE estimator do not depend on the values of the
�xed e�ects, our estimates are the same for di�erent values of c0; however, it is not true under the
random-e�ects model. Therefore, the results derived from the FE estimator are only reported once
in Table 1 since it is invariant to di�erent values of c0.
It is well-known that the performance of non/semiparametric models depends on the choice of
bandwidth. Therefore, we propose a leave-one-unit-out cross validation method to automatically
select the optimal bandwidth for estimating both the FE and RE models. Speci�cally, when
estimating �(�) at a point Zit; we remove f(Xit; Yit; Zit)gmt=1 from the data and only use the rest
of (n � 1)m observations to calculate b�(�i)(Zit). In computing the RE estimate, the leave-one-unit-out cross validation method is just a trivial extension of the conventional leave-one-out cross
validation method. The conventional leave-one-out method fails to provide satisfying result due to
the existence of unknown �xed e�ects. Therefore, when calculating the FE estimator, we use the
13
following modi�ed leave-one-unit-out cross validation method:
bHopt = argminH[Y �BfX; b�(�1)(Z)g]>M>
DMD[Y �BfX; b�(�1)(Z)g]; (21)
where MD = In�m � m�1In (eme>m) satis�es MDD0 = 0; this is used to remove the unknown
�xed e�ects. In addition, BfX; b�(�1)(Z)g stacks up X>itb�(�i)(Zit) in the increasing order of i �rst
then of t. Simple calculations give
[Y �BfX; b�(�1)(Z)g]>M>DMD[Y �BfX; b�(�1)(Z)g]
= [BfX; �(Z)g �BfX; b�(�1)(Z)g]>M>DMD[BfX; �(Z)g �BfX; b�(�1)(Z)g]
+2[BfX; �(Z)g �BfX; b�(�1)(Z)g]>M>DMDV + V
>MDMDV; (22)
where the last term does not depend on the bandwidth. If vit is independent of the fXjs; Zjsg for all
i, j, s and t, or (Xit; Zit) is strictly exogenous variable, then the second term has zero expectation
because the linear transformation matrix MD removes a cross-time not cross-sectional average
from each variable, e.g. eYit = Yit �m�1Pms=1 Yis for all i and t. Therefore, the �rst term is the
dominant term in large samples and (21) is used to �nd an optimal smoothing matrix minimizing
a weighted mean squared error of fb�(Zit)g: Of course, we could use other weight matrices in (21)instead of MD as long as the weight matrices can remove the �xed e�ects and do not trigger a
non-zero expectation of the second term in (22).
Table 1 shows that the RE estimator performs better than the FE estimator when the true
model is a random e�ects model. However, the FE estimator performs much better than the RE
estimator when the true model is a �xed-e�ects model. This is expected since the RE estimator
is inconsistent when the true model is the �xed e�ects model. Therefore, our simulation results
indicate that a test for random e�ects against �xed e�ects will be always in demand when we
analyze panel data models. In Table 2 we report simulation results of the proposed nonparametric
test of random e�ects against �xed e�ects.
For the selection of the bandwidth h, for univariate case, Theorem 4.1 indicates that h ! 0,
nh!1, and nh9=2 ! 0 as n!1; if we take h � n��; Theorem 4.1 requires � 2 (29 ; 1): To ful�ll
both conditions nh ! 1 and nh9=2 ! 0 as n ! 1, we use � = 2=7. Therefore, in producing
Table 2, we use h = c(nm)�2=7b�z to calculate the RE estimator with c taking a value from :8 , 1:0,
and 1:2. Since the computation is very time consuming, we only report results for n = 50 and 100.
14

With m = 3, the e�ective sample size is 150 and 300, which is small but moderate sample size.
Although the bandwidth chosen this way may not be optimal, the results in Tables 2, 3, and 4 show
that the proposed test statistic is not very sensitive to the choice of h when c changes and that a
moderate size distortion and decent power are consistent with the �ndings in the nonparametric
tests literature. We conjecture that some bootstrap procedures can be used to reduce the size
distortion in �nite samples. We will leave this as a future research topic.
6 CONCLUSION
In this paper we proposed a local linear least squares method to estimate a �xed e�ects varying
coe�cient panel data model when the number of observations across time is �nite; a data-driven
method was introduced to automatically �nd the optimal bandwidth for the proposed FE estimator.
In addition, we introduced a new test statistic to test for a random e�ects model against a �xed
e�ects model. Monte Carlo simulations indicate that the proposed estimator and test statistic have
good �nite sample performance.
7 APPENDIX
7.1 Proof of Theorem 3.1
To make our mathematical formula short, we introduce some simpli�ed notations �rst: for each i
and t; �it = KH (Zit; z) and cH (Zi; z)�1 =
Pmt=1 �it, and for any positive integers i; j; t; s
[�]it;js = Git (z;H)GTjs (z;H) =
266641 Gjs1 � � � GjsqGit1 Git1Gjs1 � � � Git1Gjsq...
.... . .
...Gitq GitqGjs1 � � � GitqGjsq
37775=
"1
�H�1 (Zjs � z)
�TH�1 (Zit � z) H�1 (Zit � z)
�H�1 (Zjs � z)
�T#
(A.1)
where the (l + 1)th element of Gjs (z;H) is Gjsl = (Zjsl � zl) =hl; l = 1; � � � ; q. Simple calculations
show that
[�]i1t1;i2t2 [�]j1s1;j2s2 =
0@1 + qXj=1
Gj1s1jGi2t2j
1A [�]i1t1;j2s2 ;Ri (z;H)
T KH (Zi; z) emeTmKH (Zj ; z)Rj (z;H) =
mXt=1
mXs=1
�it�js [�]it;js �XitX
Tjs
�15

In addition, we obtain for a �nite positive integer j
jHj�1mXt=1
Eh�jit [�]it;it jXit
i=
mXt=1
E (St;j;1jXit) +Op�kHk2
�; (A.2)
jHj�1mXt=1
E
24�2jit qXj0=1
G2itj0 [�]it;it jXit
35 =mXt=1
E (St;j;2jXit) +Op�kHk2
�; (A.3)
where
St;j;1 =
"ft (zjXit)
RKj (u) du @ft(zjXit)
@zTHRK;j
RK;jH@ft(zjXit)
@z ft (zjXit)RK;j
#(A.4)
St;j;2 =
"ft (zjXit)
RK2j (u)uTudu @ft(zjX1t)
@zTH�K;2j
�K;2jH@ft(zjXit)
@z ft (zjXit) �K;2j
#(A.5)
where RK;j =RKj (u)uuTdu and �K;2j =
RK2j (u)
�uTu
� �uuT
�du.
Moreover, for any �nite positive integer j1 and j2; we have
jHj�2mXt=1
mXs 6=t
Eh�j1it �
j2is [�]it;is jXit; Xis
i(A.6)
=mXt=1
mXs 6=t
E�T(t;s)j1;j2;1
jXit; Xis�+Op
�kHk2
�
jHj�2mXt=1
mXs 6=t
E
24�j1it �j2is0@ qXj0=1
Gitj0Gisj0
1A [�]it;is jXit; Xis35 (A.7)
=
mXt=1
mXs 6=t
E�T(t;s)j1;j2;2
jXit; Xis�+Op
�kHk2
�where we de�ne bj1;j2;i1;i2=
RKj1 (u)u2i11 du
RKj2 (u)u2i21 du
T(t;s)j1;j2;1
=
�ft;s (z; zjXit; Xis) bj1;j2;0;0 5T
s ft;s (z; zjXit; Xis)Hbj1;j2;0;1H 5t ft;s (z; zjXit; Xis) bj1;j2;1;0 H 52
t;s ft;s (z; zjXit; Xis)Hbj1;j2;1;1
�and
T(t;s)j1;j2;2
=
�tr�H 52
t;s ft;s (z; zjXit; Xis)H�
5Tt ft;s (z; zjXit; Xis)H
H 5s ft;s (z; zjXit; Xis) ft;s (z; zjXit; Xis) Iq�q
�bj1;j2;1;1;
with5sft;s (z; zjXit; Xis) = @ft;s (z; zjXit; Xis) =@zs and52t;sft;s (z; zjXit; Xis) = @2ft;s (z; zjXit; Xis) =
�@zt@z
Ts
�.
The conditional bias and variance of vec�b�(z)� are given as follows:
Biashvec
�b�(z)� j fXit; Zitgi = hR (z;H)T SH (z)R (z;H)i�1R (z;H)T SH (z) [� (z;H) =2 +D0�0] ;16

V arhvec
�b�(z)� j fXit; Zitgi = �2v
hR (z;H)T SH (z)R (z;H)
i�1 hR (z;H)T S2H (z)R (z;H)
i�hR (z;H)T SH (z)R (z;H)
i�1:
Lemma A.1 If Assumption A3 holds, we have"nXi=1
cH (Zi; z)
#�1= Op
�n�1 jHj ln (lnn)
�. (A.8)
Proof: Simple calculations give E (Pmt=1KH (Zit; z)) = jHj f (z)+O
�jHj kHk2
�andKH (Zit; z) =
jHj ft (z) +O�jHj kHk2
�, where f (z) =
Pmt=1 ft (z). Next, we obtain for any small " > 0
Pr
(max1�i�n
mXt=1
�it > "�1f (z) jHj ln (lnn)
)= 1� Pr
(max1�i�n
mXt=1
�it � "�1f (z) jHj ln (lnn))
= 1�(1� Pr
(mXt=1
�it > "�1f (z) jHj ln (lnn)
))n� 1�
�1� "E (
Pmt=1 �it)
f (z) jHj ln (lnn)
�n� 1�
n1� "
�1 +M kHk2
�= ln (lnn)
on! 0 as n!1
where the �rst inequality uses the the generalized Chebyshev inequality and the limit is derived
using the l'Hopital's rule. This will complete the proof of this lemma.
Lemma A.2 Under Assumptions 1-3, we have
n�1 jHj�1R (z;H)T SH (z)R (z;H) � jHj�1mXt=1
E�$it�it [�]it;it
�XitX
Tit
��where $it = �it=
Pmt=1 �it 2 (0; 1) for all i and t.
17

Proof: First, simple calculation gives
An = R (z;H)T SH (z)R (z;H) = R (z;H)T WH (z)MH (z)R (z;H)
=nXi=1
Ri (z;H)T KH (Zi; z)Ri (z;H)
�nXj=1
nXi=1
qijRi (z;H)T KH (Zi; z) eme
TmKH (Zj ; z)Rj (z;H)
=nXi=1
mXt=1
�it [�]it;it �XitX
Tit
��
nXi=1
qii
mXt=1
mXs=1
�it�is [�]it;is �XitX
Tis
��
nXj=1
nXi6=j
qij
mXt=1
mXs=1
�it�js [�]it;js �XitX
Tjs
�= An1 �An2 �An3;
where MH (z) = In�m��Q
�eme
Tm
��WH (z), and the typical elements of Q are qii = cH (Zi; z)�
cH (Zi; z)2 =Pni=1 cH (Zi; z) and qij = �cH (Zi; z) cH (Zj ; z) =
Pni=1 cH (Zi; z) for i 6= j. Here,
cH (Zi; z) = (Pmt=1 �it)
�1 for all i.
Applying (A.2), (A.3), (A.6), and (A.7) toAn1, we have n�1 jHj�1An1 �
Pmt=1E
�St;1;1
�XitX
Tit
��+Op
�kHk2
�+Op
�n�
12 jHj�
12
�if kHk ! 0 and n jHj ! 1 as n!1.
Apparently,Pmt=1$it = 1 for all i. In addition, since the kernel function K (�) is zero out-
side the unit circle by Assumption 3, the summations in An2 are taken over units such that H�1 (Zit � z) � 1. By Lemma A.1 and by the LLN given Assumption 1 (a), we obtain 1
n jHjPni=1 cH (Zi; z)
nXi=1
mXt=1
mXs=1
$it$is [�]it;is �XitX
Tis
� = Op �n�1 ln (lnn)�and
1njHj
Pni=1
Pmt=1
Pms 6=t
�it�isPmt=1 �it
[�]it;is �XitX
Tis
� � 12njHj
Pni=1
Pmt=1
Pms 6=tp�it�is
[�]it;is �XitXTis
� = Op (jHj), where we use
Pmt=1 �it � �it + �is � 2
p�it�is for any t 6= s.
Hence, we have n�1 jHj�1An2 = n�1 jHj�1Pni=1
Pmt=1$it�it [�]it;it
�XitX
Tit
�+ Op (jHj). De-
note dit = $it�it [�]it;it �XitX
Tit
�and �n = n
�1 jHj�1Pni=1
Pmt=1 (dit � Edit). It is easy to show
that n�1 jHj�1�n = Op�n�1=2 jHj�1=2
�. Since E (kditk) � E
h�it
[�]it;it �XitXTit
� i � M jHj
holds for all i and t, n�1 jHj�1An2 = jHj�1Pmt=1E
h$it�it [�]it;it
�XitX
Tit
�i+ op (1) exists, but
we can not calculate the exact expectation due to the random denominator.
Consider An3. We have n�1 jHj�1 kAn3k = Op
�jHj2 ln (lnn)
�by Lemma A.1, Assump-
tion 1, and the fact that n�1 jHj�1Pni=1
Pmt=1 I
� H�1 (Zit � z) � 1� = 2f (z) + Op
�kHk2
�+
18

Op
�n�1=2 jHj�1=2
�.
Hence, we obtain
n�1 jHj�1An � n�1 jHj�1An1 � n�1 jHj�1nXi=1
mXt=1
$it�it [�]it;it �XitX
Tit
�= n�1 jHj�1
nXi=1
mXt=1
(1�$it)�it [�]it;it �XitX
Tit
�= jHj�1
mXt=1
Eh(1�$it)�it [�]it;it
�XitX
Tit
�i+ op (1) :
This will complete the proof of this Lemma.
Lemma A.3 Under Assumptions 1-3, we have
n�1 jHj�1R (z;H)T SH (z)� (z;H) � jHj�1mXt=1
Eh(1�$it)�it (Git Xit)XT
it rH
�~Zit; z
�i:
Proof: Simple calculations give
Bn = R (z;H)T SH (z)� (z;H)
=nXi=1
mXt=1
�it (Git Xit)XTit rH
�~Zit; z
��
nXj=1
nXi=1
qij
mXs=1
mXt=1
�js�it (Git Xit)XTjsrH
�~Zjs; z
�=
nXi=1
mXt=1
�it (Git Xit)XTit rH
�~Zit; z
��
nXi=1
qii
mXt=1
�2it (Git Xit)XTit rH
�~Zit; z
��
nXi=1
qii
mXt=1
mXs 6=t
�is�it (Git Xit)XTisrH
�~Zis; z
��
nXj=1
nXi6=j
qij
mXt=1
mXs=1
�js�it (Git Xit)XTjsrH
�~Zjs; z
�= Bn1 �Bn2 �Bn3 �Bn4;
where � (z;H) is de�ned in Section 3. Using the same method in the proof of Lemma A.2, we show
n�1 jHj�1Bn � n�1 jHj�1Pni=1
Pmt=1 (1�$it)�it (Git Xit)XT
it rH
�~Zit; z
�.
For l = 1; � � � ; k we have
jHj�1E [�itrH;l (Zit; z) jXit] = �2ft (zjXit)�H (z) +Op�kHk4
�jHj�1E
��itrH;l (Zit; z)H
�1 (Zit � z) jXit�= Op
�kHk3
�;
19

and E�n�1 jHj�1Bn1
��n�2 [� (z)�H (z)]
T ; O�kHk3
�oT, where
�H (z) =
�tr
�H@2�1 (z)
@z@zTH
�; � � � ; tr
�H@2�k (z)
@z@zTH
��T:
Similarly we can show that V ar�n�1 jHj�1Bn1
�= O
�n�1 jHj�1 kHk4
�if E
� XitXTisXitX
Tis
� <M <1 for all t and s.
In addition, it is easy to show that n�1 jHj�1Pni=1
Pmt=1$it�it (Git Xit)XT
it rH
�~Zit; z
�=
n�1 jHj�1Pni=1
Pmt=1E
h$it�it (Git Xit)XT
it rH
�~Zit; z
�i+Op
�n�1=2 jHj�1=2 kHk2
�, where
jHj�1Pmt=1E
h$it�it (Git Xit)XT
it rH
�~Zit; z
�i� jHj�1
Pmt=1E
h�it
(Git Xit)XTit rH
�~Zit; z
� i�M kHk2 <1 for all i and t.
This will complete the proof of this lemma.
Lemma A.4 Under Assumptions 1-3, we have
n�1 jHj�1R (z;H)T SH (z)D0�0 = Op�n�1=2 jHj ln (lnn)
�.
Proof: Simple calculations give MH(z)D0�0 = ��MH(z) (en em), where �� = n�1Pni=1 �i. It
follows that
Cn = R (z;H)T SH (z)D0�0 = ��R (z;H)T SH (z) (en em)
= ��nXi=1
mXt=1
RTi Kiem � ��nXj=1
mXt=1
�jt
!nXi=1
qijRTi Kiem
= ��nXi=1
mXt=1
�it (Git Xit)� ��nXj=1
mXt=1
�jt
!nXi=1
qij
mXt=1
�it (Git Xit)
= n��
24 nXi=1
mXt=1
�it
!�135�1 nXi=1
mXt=1
$it (Git Xit)
and we obtain n�1 jHj�1Cn = ��Op (jHj ln (lnn)) by (a) Lemma A.1, (b) for all l = 1; � � � ; q,
k ((Zit;l � zl) =h) = 0 if jZit;l � zlj > h by Assumption 3, (c) $it � 1, and (d) E kXitk1+� < M <1
for some � > 0 by Assumption 1. Since �i � iid�0; �2�
�, we have �� = Op
�n�1=2
�. It follows that
n�1 jHj�1Cn = Op�n�1=2 jHj ln (lnn)
�.
Lemma A.5 Under Assumptions 1-3, we have
n�1 jHj�1R (z;H)T S2H (z)R (z;H) � jHj�1
mXt=1
Eh(1�$it)2 �2it [�]it
�XitX
Tit
�i:
20

Proof: Simple calculations give
Dn = R (z;H)T S2H (z)R (z;H) = R (z;H)T WH (z)MH (z)MH (z)
T WH (z)R (z;H)
=nXi=1
Ri (z;H)T K2
H (Zi; z)Ri (z;H)� 2nXj=1
nXi=1
qjiRj (z;H)T K2
H (Zj ; z) emeTmKH (Zi; z)Ri (z;H)
+nXj=1
nXi=1
nXi0=1
qijqji0Ri (z;H)T KH (Zi; z) eme
TmK
2H (Zj ; z) eme
TmKH (Zi0 ; z)Ri0 (z;H)
= Dn1 � 2Dn2 +Dn3:
Using the same method in the proof of Lemma A.2, we show Dn �Pni=1
Pmt=1 (1�$it)
2 �2it [�]it;it�XitX
Tit
�. It is easy to show that n�1 jHj�1Dn1 = n�1 jHj�1
Pni=1
Pmt=1 �
2it [�]it;it
�XitX
Tit
�=Pm
t=1E�St;2;1
�XitX
Tit
��+Op
�kHk2
�+Op
�n�1=2 jHj�1=2
�.
Also, we obtain n�1 jHj�1Pni=1
Pmt=1 (1�$it)
2 �2it [�]it;it�XitX
Tit
�= { (z)+Op
�n�1=2 jHj�1=2
�,
where { (z) = jHj�1Pmt=1 E
h(1�$it)2 �2it [�]it;it
�XitX
Tit
�i� jHj�1
Pmt=1E
h�2it
[�]it;it �XitXTit
� i�M <1 for all i and t.
The four lemmas above are enough to give the result of Theorem 3.1. Moreover, applying
Liaponuov's CLT will give the result of Theorem 3.2. Since the proof is a rather standard procedure,
we drop the details for compactness of the paper.
7.2 Technical Sketch{Random E�ects Estimator
The RE estimator, �RE(�), is the solution to the following optimization problem:
min�(z)
[Y �R (z;H) vec (� (z))]T WH (z) [Y �R (z;H) vec (� (z))] ;
that is, we have
vec��RE (z)
�=
hR (z;H)T WH (z)R (z;H)
i�1R (z;H)T WH (z)Y
= vec (� (z)) +hR (z;H)T WH (z)R (z;H)
i�1 �~An=2 + ~Bn + ~Cn
�where ~An = R (z;H)
T WH (z)� (z;H), ~Bn = R (z;H)T WH (z)D0�0, and ~Cn = R (z;H)
T WH (z)V .
Its asymptotic properties are as follows.
21

Lemma A.6 Under Assumptions 1-3, and E�XitX
Tit jz�and E (�iXitjz) have continuous second-
order derivative at z 2 Rq. Also,pn jHj kHk2 = O (1) as n ! 1, and E
�jvitj2+�
�< 1 and
E�j�ij2+�
�< M <1 for all i and t and for some � > 0, we have under H0
pn jHj
�b�RE(z)� �(z)� �2�H (z) =2� d! N�0;��(z);RE
�; (A.9)
where �2 =Rk (v) v2dv, ��(z);RE =
��2� + �
2v
�� (z)�1
RK2 (u) du and � (z) =
Pmt=1 ft (z)E
�X1tX
T1tjz�.
Under H1, we have
Bias�b�RE(z)� = �(z)�1
mXt=1
ft (z)E (�1X1tjz) + o (1)
V ar��RE (z)
�= n�1 jHj�1 �2v� (z)
�1ZK2 (u) du (A.10)
where �H (z) is given in the proof of Lemma A.3.
Proof of Lemma A.6: First, we have the following decompositionpn jHj
h�RE (z)� �(z)
i=pn jHj
h�RE (z)� E
��RE (z)
�i+pn jHj
hE��RE (z)
�� �(z)
i;
where we can show that the �rst term converges to a normal distribution with mean zero by
Liaponuov's CLT (the details are dropped since it is a rather standard proof), and the second
term contributes to the asymptotic bias. Since it will cause no notational confusion, we drop the
subscription `RE'. Below, we use Biasi
n� (z)
oand V ari
n� (z)
oto denote the respective bias and
variance of �RE (z) under H0 if i = 0 and under H1 if i = 1.
First, under H0, the bias and variance of � (z) are as follows: Bias0
n� (z) j f(Xit; Zit)g
o=
Sp
hR (z;H)T WH (z)R (z;H)
i�1R (z;H)T WH (z)� (z;H) =2 and
V ar0
n� (z) j f(Xit; Zit)g
o= Sp
hR (z;H)T WH (z)R (z;H)
i�1 hR (z;H)T WH (z)V ar(UU
T )WH (z)R (z;H)i
�hR (z;H)T WH (z)R (z;H)
i�1STp :
It is simple to show that V ar(UUT ) = �2�In �eme
Tm
�+ �2vIn�m.
22

Next, underH1, we notice thatBias1
n� (z) j f(Xit; Zit)g
ois the sum ofBias0
n� (z) j f(Xit; Zit)g
oplus an additional term Sp
hR (z;H)T WH (z)R (z;H)
i�1R (z;H)T WH (z)D0�0, and that
V ar1
n� (z) j f(Xit; Zit)g
o= �2vSp
hR (z;H)T WH (z)R (z;H)
i�1 hR (z;H)T WH (z)
2R (z;H)i
�hR (z;H)T WH (z)R (z;H)
i�1STp .
Noting that R (z;H)T WH (z)R (z;H) is An1 in Lemma A.2 and that R (z;H)T WH (z)� (z;H)
is Bn1 in Lemma A.3, we have
Bias0
n� (z)
o= �2�H (z) =2 + o
�kHk2
�. (A.11)
In addition, under Assumptions 1-3, and E�j�ij2+�
�< M < 1 and E
�kXitk2+�
�< M < 1 for
all i and t and for some � > 0, we show that
n�1 jHj�1 SpR (z;H)T WH (z)D0�0 = n�1 jHj�1 Sp
nXi=1
�i
mXt=1
�it (Git Xit)
=mXt=1
ft (z)E (�1X1tjz) +Op�kHk2
�+Op
�(n jHj)�1=2
�; (A.12)
which is a non-zero constant plus a term of op(1) under H1. Combining (A.11) and (A.12), we
obtain (A.10). Hence, under H1, the bias of the RE estimator will not vanish as n!1, and this
leads to the inconsistency of the RE estimator under H1.
As for the asymptotic variance, we can easily show that under H0
V ar0
n� (z)
o= n�1 jHj�1
��2� + �
2v
�� (z)�1
ZK2 (u) du; (A.13)
and under H1, V ar1
n� (z)
o= n�1 jHj�1 �2v� (z)
�1 R K2 (u) du, where we have recognized that
R (z;H)T WH (z)2R (z;H) is Dn1 in Lemma A.5, and
��2� + �
2v
�R (z;H)T WH (z)
2R (z;H) is the
leading term of R (z;H)T WH (z)V ar(UUT )WH (z)R (z;H).
23

7.3 Proof of Theorem 4.1
De�ne 4i = (4i1; � � � ;4im)T with 4it = XT
it
�� (Zit)� �RE (Zit)
�. Since MDD0 = 0; we can
decompose the proposed statistic into three terms
Tn =1
n2 jHj
nXi=1
Xj 6=i
UTi QmAi;jQmUj
=1
n2 jHj
nXi=1
Xj 6=i
4Ti QmAi;jQm 4j +
2
n2 jHj
nXi=1
Xj 6=i
4Ti QmAi;jQmVj
+1
n2 jHj
nXi=1
Xj 6=i
V Ti QmAi;jQmVj
= Tn1 + 2Tn2 + Tn3
where Vi = (vi1; � � � ; vim)T is the m � 1 error vector. Since �RE (Zit) does not depend on the jth
unit observations and �RE (Zjt) does not depend on the ith unit observations for a pair of (i; j); it
is easy to see that E (Tn2) = 0: The proofs fall into the standard procedures seen in the literature
of nonparametric tests. We therefore give a very brief proof below.
Firstly, applying Hall's (1984) CLT, we can show that under both H0 and H1
npjHjTn3
d! N�0; �20
�(A.14)
by de�ning Hn (�i; �j) = VTi QmAi;jQmVj with �i = (Xi; Zi; Vi), which is a symmetric, centred and
degenerate variable. We are able to show that
E�G2n (�1; �2)
�+ n�1E
�H4n ((�1; �2))
�fE [H2
n ((�1; �2))]g2 =
O�jHj3
�+O
�n�1 jHj
�O�jHj2
� ! 0
if jHj ! 0 and n jHj ! 1 as n ! 1; where Gn (�1; �2) = E�i [Hn ((�1; �i))Hn ((�2; �i))]. In
addition,
var�npjHjTn3
�= 2 jHj�1E
�H2n (�1; �2)
�� 2
�1�m�1�2 �4v mX
t=1
mXs=1
jHj�1EhK2H (Z1s; Z2t)
�XT1sX2t
�2i= �20 + o (1) .
Secondly, we can show that npjHjTn2 = Op
�kHk2
�+ Op
�n�1=2 jHj�1=2
�under H0 and
npjHjTn2 = Op (1) under H1: Moreover, we have, under H0, n
pjHjTn1 = Op
�npjHj kHk4
�;
under H1, npjHjTn1 = Op
�npjHj�.
24

Finally, to estimate �20 consistently under both H0 and H1, we replace the unknown Vi and
Vj in Tn3 by the estimated residual vectors from the FE estimator. Simple calculations show that
the typical element of ViQm is evit = yit �XTit �FE (Zit) � vit �
��yi �m�1Pm
t=1XTit �FE (Zit)� �vi
�= ~4it � (vit � �vi), where ~4it = XT
it
�� (Zit)� �FE (Zit)
��m�1Pm
t=1XTit
�� (Zit)� �FE (Zit)
�=Pm
l=1 qltXTil
�� (Zil)� �FE (Zil)
�with qtt = 1� 1=m and qlt = �1=m for l 6= t. The leave-two-unit-
out FE estimator does not use the observations from the ith and jth units for a pair (i; j), and this
leads to E�V Ti QmAi;jQmVj
�2�Pmt=1
Pms=1E
hK2H (Zit; Zjs)
�XTitXjs
�2 � ~42it~42js +
~42it~v
2js +
~42js~v
2it + ~v
2it~v
2js
�i�Pmt=1
Pms=1E
hK2H (Zit; Zjs)
�XTitXjs
�2~v2it~v
2js
i, where ~vit = vit � �vi and �vi = m�1Pm
t=1 vit.
ACKNOWLEDGEMENTS
Sun's research was supported from the Social Sciences and Humanities Research Council of
Canada (SSHRC). Carroll's research was supported by a grant from the National Cancer Institute
(CA-57030), and by the Texas A&M Center for Environmental and Rural Health via a grant from
the National Institute of Environmental Health Sciences (P30-ES09106). The corresponding author:
Yiguo Sun. Email address: [email protected].
REFERENCES
Arellano, M. (2003). Panel Data Econometrics. Oxford University Press.
Baltagi, B. (2005). Econometrics Analysis of Panel Data (2nd edition). Wiley, New York.
Cai, Z. and Li, Q. (2008). Nonparametric estimation of varying coe�cient dynamic panel data
models. Econometric Theory, 24, 1321-1342.
Hall, P. (1984). Central limit theorem for integrated square error of multivariate nonparametric
density estimators. Annals of Statistics, 14, 1-16.
Henderson, D. J., Carroll, R.J., and Li, Q. (2008). Nonparametric estimation and testing of �xed
e�ects panel data models. Journal of Econometrics, 144, 257-275.
Henderson, D. J. and Ullah, A. (2005). A nonparametric random e�ects estimator. Economics
Letters, 88, 403-407.
Hsiao, C. (2003). Analysis of Panel Data (2nd edition). Cambridge University Press.
25
Li, Q. and Huang, C.J., Li, D. and Fu, T. (2002). Semiparametric smooth coe�cient models.
Journal of Business & Economic Statistics, 20, 412-422.
Li, Q. and Stengos, T. (1996). Semiparametric estimation of partially linear panel data models.
Journal of Econometrics, 71, 389-397.
Lin, D. Y. and Ying, Z. (2001). Semiparametric and nonparametric regression analysis of longitu-
dinal data (with discussion). Journal of the American Statistical Association, 96, 103-126.
Lin, X., and Carroll, R. J. (2000). Nonparametric function estimation for clustered data when the
predictor is measured without/with Error. Journal of the American Statistical Association, 95,
520-534.
Lin, X. and Carroll, R. J. (2001). Semiparametric regression for clustered data using generalized
estimation equations. Journal of the American Statistical Association, 96, 1045-1056.
Lin, X. and Carroll, R. J. (2006). Semiparametric estimation in general repeated measures prob-
lems. Journal of the Royal Statistical Society, Series B, 68, 68-88.
Lin, X., Wang, N., Welsh, A. H. and Carroll, R. J. (2004). Equivalent kernels of smoothing splines
in nonparametric regression for longitudinal/clustered data. Biometrika, 91, 177-194.
Poirier, D.J. (1995). Intermediate Statistics and Econometrics: a Comparative Approach. The
MIT Press.
Ruckstuhl, A. F., Welsh, A. H. and Carroll, R. J. (2000). Nonparametric function estimation of
the relationship between two repeatedly measured variables. Statistica Sinica, 10, 51-71.
Su, L. and Ullah, A. (2006). Pro�le likelihood estimation of partially linear panel data models with
�xed e�ects. Economics Letters, 92, 75-81.
Wang, N. (2003). Marginal nonparametric kernel regression accounting for within-subject correla-
tion. Biometrika, 90, 43-52.
Wu, H. and Zhang, J. Y. (2002). Local polynomial mixed-e�ects models for longitudinal data.
Journal of the American Statistical Association, 97, 883-897.
26
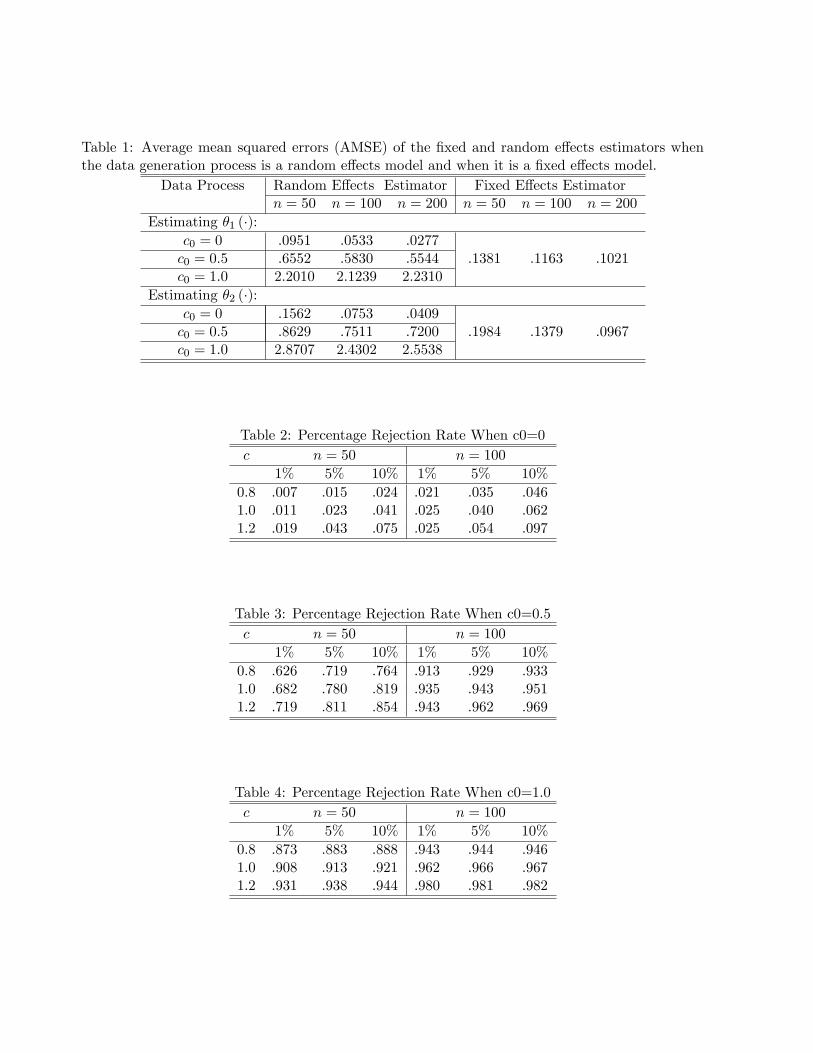
Table 1: Average mean squared errors (AMSE) of the �xed and random e�ects estimators whenthe data generation process is a random e�ects model and when it is a �xed e�ects model.
Data Process Random E�ects Estimator Fixed E�ects Estimatorn = 50 n = 100 n = 200 n = 50 n = 100 n = 200
Estimating �1 (�):c0 = 0 .0951 .0533 .0277c0 = 0:5 .6552 .5830 .5544 .1381 .1163 .1021c0 = 1:0 2.2010 2.1239 2.2310
Estimating �2 (�):c0 = 0 .1562 .0753 .0409c0 = 0:5 .8629 .7511 .7200 .1984 .1379 .0967c0 = 1:0 2.8707 2.4302 2.5538
Table 2: Percentage Rejection Rate When c0=0
c n = 50 n = 100
1% 5% 10% 1% 5% 10%
0.8 .007 .015 .024 .021 .035 .0461.0 .011 .023 .041 .025 .040 .0621.2 .019 .043 .075 .025 .054 .097
Table 3: Percentage Rejection Rate When c0=0.5
c n = 50 n = 100
1% 5% 10% 1% 5% 10%
0.8 .626 .719 .764 .913 .929 .9331.0 .682 .780 .819 .935 .943 .9511.2 .719 .811 .854 .943 .962 .969
Table 4: Percentage Rejection Rate When c0=1.0
c n = 50 n = 100
1% 5% 10% 1% 5% 10%
0.8 .873 .883 .888 .943 .944 .9461.0 .908 .913 .921 .962 .966 .9671.2 .931 .938 .944 .980 .981 .982





























