Embed Size (px)
Citation preview

Seminar 2 !Early History & Fiction!
Orbital Motion!FRS 112, Princeton University!
Robert Stengel"
Copyright 2015 by Robert Stengel. All rights reserved. For educational use only.!http://www.princeton.edu/~stengel/FRS.html!
Decades of the Great Dreams"From the Earth to the Moon, Jules Verne"
Equations of Motion"Momentum and Energy"
"
1!
Rockets, Missiles, and Men in Space, Ch 2!Round the Moon, excerpts!Understanding Space, Ch 4!
A Timeline of Events Critical to Space Travel – V!Date Science Fact Science Fiction World Scene 17th-18th cent
Gottfried Leibniz (1646-1716): Calculus (1675), founder of "dynamics". Isaac Newton (1642-1727): Laws of Motion, Universal Gravitation, Principia (1687).
Jonathan Swift, Gulliver's Travels (1726),
1689: Peter the Great, Czar of Russia. 1690: Battle of the Boyne. 1729: Bach's St. Matthew Passion. 1746: PRINCETON IS FOUNDED!
18th-19th cent
Pierre-Simon Laplace (1749-1827): Solar system cosmology and dynamics. Carl Friedrich Gauss (1777-1855): Orbit calculation, shape of the Earth. "Balloonatics": Montgolfier brothers & deRozier (1783), 1st manned flight; Madame Blanchard; Major Turner; Glaisher & Coxwell to 35K ft
Voltaire, Micromégas (1752)
AMERICAN REVOLUTION; FRENCH REVOLUTION; AGE OF THE ENLIGHTENMENT; INDUSTRIAL REVOLUTION. 1781: Herschel discovers Uranus. 1800s: Exploits of Napoleon. Steamships, railroads, Babbage's Analytical Engine.
2!

Gottfreid Leibniz!(1646-1716)!
!" German mathematician and philosopher"!" Along with Newton, invented “infinitesimal calculus”"!" Established notation for derivatives, integrals, and “chain
rule”, e.g.,"
y = f x( ); dydx
=d f x( )!" #$
dx; d 2y
dx2= ddx
d f x( )!" #$dx
%&'
('
)*'
+'
ydx! = f x( )dx! ; ydx! = y dxdudu!
dydx
= dydu1
idu1du2
i!idundx 3!
Pierre Simon Laplace!(1749-1827)!
!" Mathematical astronomy and statstics"!" The “French Newton”"!" Mécanique Céleste (1799-1825), 5 volumes"!" Laplace transform!!" Laplace’s equation!!" The “figure” of the Earth and its potential
(TBD); spherical harmonics"
L x(t)[ ] = x(s) = x(t)e! st dt0
"
#s =$ + j% , ( j = i = !1)
!2" = 0
4!

Karl Friedrich Gauss!(1777-1855)!
•" German mathematician who contributed to many fields"
•" Determination of conic section orbits from observations"
•" Method of “least squares”"•" “Gaussian distribution”"•" Discovered “Fast Fourier
Transform” (Cooley, Tukey, 1965) before there was a Fourier Transform (1807)!
•" Circuit laws, electromagnetics"5!
Gaussian probability density function of random variable, x
pr x( ) = 12!"
e#x#µ( )22" 2
µ : Mean value of x; " : Standard deviation of x
!" Describes variability of many physical symbols "!" Also called a “Normal Distribution”"
!" Classic “bell-shaped curve”" 6!

Charles Babbage!(1791-1871)!
!" Conceived of Difference Engine to tabulate polynomials (1822)"
!" Analytical Engine with programmable arithmetic logic (1837)"
!" Neither machine was built in his lifetime"
7!
Decades of the Great Dreams!
8!

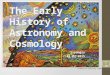
Near and Far Sides of the Moon"Clementine mission, 1994"
Albedo!
Height above Reference!
9!
A Timeline of Events Critical to Space Travel – VI!Date Science Fact Science Fiction World Scene Early 19th cent Karl Jacobi (1804-
1851): mathematics of dynamical systems. William Congreve: Military & rescue rockets.
Edgar Allan Poe, The Unparalleled Adventure of One Hans Pfaall (1835), The moon hoax (False account of Herschel's research, 1835)
Bombardment of Copenhagen (1807); WAR OF 1812 (Star-Spangled Banner); Battle of Waterloo
Late 19th cent Henri Poincaré (1854-1912): Restricted 3-body problem. Kirchoff & Bunsen: Spectroscope (1859)
1865: Jules Verne, From the Earth to the Moon, Alexandre Dumas, Voyage a la lune, Henri de Parville, Un Habitant de la planete Mars, Anon, Voyage a la lune, English clergyman, Chrysostom Trueman (nom de plume), The History of a Voyage to the Moon, Camille Flammarion, Mondes imaginaires et mondes reels
AMERICAN CIVIL WAR; FRANCO-PRUSSIAN WAR; VICTORIAN ERA. 1866: Nobel invents dynamite. 1876: Bell invents telephone. 1895: Roentgen discovers X-rays.
10!

Jules Verne (1828-1905)!
1865!
11!
Orbital Motion!
12!

Orbits 101 "Satellites! Escape and Capture
(Comets, Meteorites)!
13!
Two-Body Orbits are Conic Sections "
14!

Orbits 102"(2-Body Problem) !
•" e.g., "–" Sun and Earth or"–" Earth and Moon or"–" Earth and Satellite"
•" Circular orbit: radius and velocity are constant"•" Low Earth orbit: 17,000 mph = 24,000
ft/s = 7.3 km/s"•" Super-circular velocities"
–" Earth to Moon: 24,550 mph = 36,000 ft/s = 11.1 km/s"
–" Escape: 25,000 mph = 36,600 ft/s = 11.3 km/s"
•" Near escape velocity, small changes have huge influence on apogee"
15!
!" Particle of fixed mass (also called a point mass) acted upon by a force changes velocity with "!" acceleration proportional to and in direction of force "
!" Inertial reference frame "!" Ratio of force to acceleration is the mass of the
particle: F = m a"
Newton’s 2nd Law "
ddt
mv t( )!" #$ = mdv t( )dt
= ma t( ) = F
F =
fxfyfz
!
"
%%%%
#
$
&&&&
= force vectorm ddt
vx t( )vy t( )vz t( )
!
"
####
$
%
&&&&
=
fxfyfz
!
"
####
$
%
&&&&
16!

Equations of Motion for a Particle "
dv t( )dt
= !v t( ) = 1mF =
fx mfy m
fz m
!
"
####
$
%
&&&&
=axayaz
!
"
####
$
%
&&&&
Integrating the acceleration (Newton’s 2nd Law) allows us to solve for the velocity of the particle"
v T( ) = dv t( )dt
dt0
T
! + v 0( ) = a t( )dt0
T
! + v 0( ) = 1mFdt
0
T
! + v 0( )
vx T( )vy T( )vz T( )
!
"
####
$
%
&&&&
=
ax t( )ay t( )az t( )
!
"
####
$
%
&&&&
dt0
T
' +
vx 0( )vy 0( )vz 0( )
!
"
####
$
%
&&&&
=
fx t( ) mfy t( ) mfz t( ) m
!
"
####
$
%
&&&&
dt0
T
' +
vx 0( )vy 0( )vz 0( )
!
"
####
$
%
&&&&
3 components of velocity"
17!
Equations of Motion for a Particle "
dr t( )dt
= !r t( ) = v t( ) =!x t( )!y t( )!z t( )
!
"
####
$
%
&&&&
=
vx t( )vy t( )vz t( )
!
"
####
$
%
&&&&
Integrating the velocity allows us to solve for the position of the particle"
r T( ) = dr t( )dt
dt0
T
! + r 0( ) = vdt0
T
! + r 0( )
x T( )y T( )z T( )
!
"
####
$
%
&&&&
=
vx t( )vy t( )vz t( )
!
"
####
$
%
&&&&
dt0
T
' +
x 0( )y 0( )z 0( )
!
"
####
$
%
&&&&
3 components of position"
18!

Trajectories Calculated with Flat-Earth Model"
!" Constant gravity, g, is the only force in the model, i.e., no aerodynamic or thrust force"
!" Can neglect motions in the y direction"
vx t( ) = vx0
!vz t( ) = !g z positive up( )!x t( ) = vx t( )!z t( ) = vz t( )
vx 0( ) = vx0vz 0( ) = vz0x 0( ) = x0z 0( ) = z0
Dynamic Equations"
Initial Conditions"
vx T( ) = vx0vz T( ) = vz0 ! gdt
0
T
" = vz0 ! gT
x T( ) = x0 + vx0T
z T( ) = z0 + vz0T ! gt dt0
T
" = z0 + vz0T ! gT 2 2
Analytic (Closed-Form) Solution"
19!
Trajectories Calculated with Flat-Earth Model"
vx 0( ) = 10m / svz 0( ) = 100,150, 200m / sx 0( ) = 0z 0( ) = 0
20!

45-kg payload to 370-km altitude"
Nike-Tomahawk 2-Stage Sounding Rocket"
Trajectory well approximated using flat-Earth model from 2nd stage burnout"
Nike-Ajax Anti-Aircraft Missile"
21!
MATLAB Code for Flat-Earth Trajectories"
Script for "Analytic Solution"
g = 9.8; ! t = 0:0.1:40;! ! vx0 = 10;! vz0 = 100;! x0 = 0;! z0 = 0;! ! vx1 = vx0;! vz1 = vz0 – g*t;! x1 = x0 + vx0*t;! z1 = z0 + vz0*t - 0.5*g*t.* t;!!
Script for "Numerical Solution"
tspan = 40; % Time span, s!xo = [10;100;0;0]; % Init. Cond.![t1,x1] = ode45('FlatEarth',tspan,xo);!
Function for "Numerical Solution"
function xdot = FlatEarth(t,x) !% x(1) = vx!% x(2) = vz!% x(3) = x!% x(4) = z! g ! = 9.8;! xdot(1) = 0;! xdot(2) = -g;! xdot(3) = x(1);! xdot(4) = x(2);! xdot = xdot';!end! 22!

Sub-Orbital (Sounding) Rockets 1945 - Present!
NASA Wallops Island Control Center"
Canadian!Black Brant XII!
LTV!Scout!
23!
Spherical Model of the Rotating Earth"
RE =xoyozo
!
"
###
$
%
&&&E
=cosLE cos'E
cosLE sin'E
sinLE
!
"
###
$
%
&&&R
Spherical model of earth s surface, earth-fixed (rotating) coordinates"
LE : Latitude (from Equator), deg!E : Longitude (from Prime Meridian), degR : Radius (from Earth's center), deg
Earth's rotation rate, !, is 15.04 deg/hr24!

Non-Rotating (Inertial) Reference Frame for the Earth"
Celestial longitude, "C, measured from First Point of Aries on the
Celestial Sphere at Vernal Equinox"
!C = !E + " t # tepoch( ) = !E + "$t
25!
Transformation Effects of Rotation"
RE =cos!"t sin!"t 0#sin!"t cos!"t 0
0 0 1
$
%
&&&
'
(
)))R I =
cos!"t sin!"t 0#sin!"t cos!"t 0
0 0 1
$
%
&&&
'
(
)))
xoyozo
$
%
&&&
'
(
)))I
rE =cosLE cos!E
cosLE sin!E
sinLE
"
#
$$$
%
&
'''R + Altitude( ); rI =
cosLE cos!CcosLE sin!CsinLE
"
#
$$$
%
&
'''R + Altitude( )
Transformation from inertial frame to rotating frame"
Location of satellite, rotating and inertial frames"
Orbital calculations generally are made in an inertial frame of reference"
26!

Gravity Force Between Two Point Masses"
Magnitude of gravitational attraction"
G : Gravitational constant = 6.67 !10"11Nm2 / kg2
m1 : Mass of 1st body = 5.98 !1024 kg for Earthm2 : Mass of 2ndbody = 7.35 !1022 kg for Moonr : Distance between centers of mass of m1 and m2, m
Force between Earth and Moon = 1.98 x 1020N!
F = Gm1m2
r2
27!
Acceleration Due To Gravity"
F2 = m2a1on2 =Gm1m2
r2
a1on2 =Gm1
r2!µ1r2
At Earth’s surface, acceleration due to gravity is "
ag ! goEarth =
µE
Rsurface2 = 3.98 !10
14 m3 s2
6,378,137m( )2= 9.798m s2
What is the acceleration due to gravity at the Moon’s surface (R = 1,375,000 m)?"
µ1 = Gm1 : Gravitational parameter of 1st mass
28!
“Inverse-square Law”!

Gravitational Force Vector of the Earth"
Force always directed toward the Earth’s center"
rIrI
=
xyz
!
"
###
$
%
&&&I
xI2 + yI
2 + zI2=
cosLE cos'I
cosLE sin'I
sinLE
!
"
###
$
%
&&&
Fg = !m µE
rI2rIrI
"
#$%
&'= !m µE
rI3
xyz
(
)
***
+
,
---I
(vector), as rI = rI
(x, y, z) establishes the direction of the local vertical"
29!
Equations of Motion for a Particle in an Inverse-Square-Law Field "
dv t( )dt
= !v t( ) = 1mFg = ! µE
rI2rIrI
"
#$%
&'= ! µE
rI3
xyz
(
)
***
+
,
---
Integrating the acceleration (Newton’s 2nd Law) allows us to solve for the velocity of the particle"
v T( ) = dv t( )dt
dt0
T
! + v 0( ) = a t( )dt0
T
! + v 0( ) = 1mFdt
0
T
! + v 0( )
vx T( )vy T( )vz T( )
!
"
####
$
%
&&&&
= 'µE
x rI3
y rI3
z rI3
!
"
####
$
%
&&&&
dt0
T
( +
vx 0( )vy 0( )vz 0( )
!
"
####
$
%
&&&&
3 components of velocity"
30!

Equations of Motion for a Particle in an Inverse-Square-Law Field "
dr t( )dt
= !r t( ) = v t( ) =!x t( )!y t( )!z t( )
!
"
####
$
%
&&&&
=
vx t( )vy t( )vz t( )
!
"
####
$
%
&&&&
Same as before. Integrating the velocity allows us to solve for the position of the particle"
r T( ) = dr t( )dt
dt0
T
! + r 0( ) = vdt0
T
! + r 0( )
x T( )y T( )z T( )
!
"
####
$
%
&&&&
=
vx t( )vy t( )vz t( )
!
"
####
$
%
&&&&
dt0
T
' +
x 0( )y 0( )z 0( )
!
"
####
$
%
&&&&
3 components of position"
31!
Dynamic Model with Inverse-Square-Law Gravity"
!" No aerodynamic or thrust force"!" Neglect motions in the z direction"
!vx t( ) = !µE xI t( ) rI 3 t( )!vy t( ) = !µE yI t( ) rI 3 t( )!xI t( ) = vx t( )!yI t( ) = vy t( )where rI t( ) = xI
2 t( ) + yI2 t( )
vx 0( ) = 7.5, 8, 8.5 km / svy 0( ) = 0x 0( ) = 0y 0( ) = 6,378 km = R
Dynamic Equations" Initial Conditions at Equator"
32!

Trajectories Calculated with Inverse-Square-Law Model"
33!
Equatorial Orbits Calculated with Inverse-Square-Law Model"
34!

MATLAB Code for Spherical-Earth Trajectories"
Script for Numerical Solution" R = 6378; % Earth Surface Radius, km! tspan = 6000; % seconds! options = odeset('MaxStep', 10)! xo = [7.5;0;0;R];! [t1,x1] = ode15s('RoundEarth',tspan,xo,options);! for i = 1:length(t1)! v1(i) = sqrt(x1(i,1)*x1(i,1) + x1(i,2)*x1(i,2));! r1(i) = sqrt(x1(i,3)*x1(i,3) + x1(i,4)*x1(i,4));! end!
function xdot = RoundEarth(t,x)!% x(1) = vx!% x(2) = vy!% x(3) = x!% x(4) = y! mu = 3.98*10^5; % km^2/s^2! r = sqrt(x(3)^2 + x(4)^2);! ! xdot(1) = -mu * x(3) / r^3;! xdot(2) = -mu * x(4) / r^3;! xdot(3) = x(1);! xdot(4) = x(2);! xdot = xdot';!end!
Function for "Numerical Solution"
35!
Work"!" “Work” is a scalar measure of change in energy"
!" With constant force,"
In one dimension, W12 = F r2 ! r1( ) = F"r
!" With varying force,"
W12 = FT drr1
r2
! , dr =dxdydz
"
#
$$$
%
&
'''
= fxdx + fydy + fzdz( )r1
r2
!
In three dimensions, W12 = FT r2 ! r1( ) = FT"r
36!

Conservative Force"!" Assume that the 3-D force
field is a function of position"
F = F r( )
Iron Filings!Around Magnet!
Force Emanating from Source!
!" The force field is conservative if"
FT r( )drr1
r2
! + FT r( )drr2
r1
! = 0
… for any path between r1 and r2 and back"
37!
Gravitational Force Field"!" Gravitational force field"
!" Gravitational force field is conservative because"
! m µE
rI3 rI drI
r1
r2
" ! m µE
rI3 rI drI
r2
r1
" = 0
… for any path between r1 and r2 and back"
Fg = !m µE
rI3 rI
38!

How Do We Know that Gravitational Force is Conservative?"
Because the force is the derivative (with respect to r) of a scalar function of r called
the potential, V(r):"
V r( ) = !m µr+Vo = !m µ
rTr( )1 2+Vo
!V r( )!r
=!V !x!V !y!V !z
"
#
$$$
%
&
'''= m µ
r3
xyz
"
#
$$$
%
&
'''= (Fg
This derivative is also called the gradient of V with respect to r" 39!
Potential Energy"Potential energy is defined with respect to a
reference radius, r1"
!PE !V r2( )"V r1( ) = "m µr2+m µ
r1(The term Vo cancels)
Example:"m = 10kg
µ = 3.98 !1014 m3 s2
r1 = 6,378,000mr2 = 10,000,000m
!PE = 3.98 "1015 #1107
+ 16.378 "106
$%&
'()
= 2.26 "108 kg im2 / s2 = 2.26 "108 joules
!PE = 0 when r2 = r1
40!

Kinetic Energy"Apply Newton’s 2nd Law to the definition of Work"
drdt
= v; dr = vdt F = m dvdt
W12 = FT drr1
r2
! = m dvdt
"#$
%&'T
vdtt1
t2
!
= 12m d
dtvTv( )dt
t1
t2
! = 12m d
dtv2( )dt
t1
t2
!
= 12mv2
t1
t2
= 12m v2 t2( )! v2 t1( )"# $%
= 12m v2
2 ! v12"# $% ! T2 !T1 ! &KE
Work evaluated as the integral from 1st to 2nd time"
T is the kinetic energy of the point mass, m!41!
Total Energy"!" Potential energy of mass,
m, depends only on the gravitational force field "
T ! KE = 1
2mv2
!" Total energy is the sum of the two:"
!" Kinetic energy of mass, m, depends only on the velocity magnitude measured in an inertial frame of reference "
PE = !m µr
E = PE + KE
= !m µr+ 12mv2
42!

Energy in a Conservative System"Energy is constant on the trajectory"
E = PE + KE
= !m µr+ 12mv2 = Constant
E2 ! E1 = 0
!m µr2+ 12mv2
2"#$
%&'! !m µ
r1+ 12mv1
2"#$
%&'= 0
!m µr2+m µ
r1
"#$
%&'= 12mv2
2 ! 12mv1
2"#$
%&'
PE2 ! PE1 = KE2 ! KE1
P1!
P2!
43!
In a potential force field (e.g., inverse-square-law gravity), change in potential energy between any 2 points on the orbit equals change in kinetic energy"
Conservation of Energy"Energy is conserved in an elastic collision, i.e. no
losses due to friction, air drag, etc."“Newton’s Cradle” illustrates interchange of
potential and kinetic energy in a gravitational field"
44!

Ellipse"As Conic Section! As Tilted Circle!
45!
Elliptical Planetary Orbits"!" Assume satellite mass is
negligible compared to Earth’s mass"
!" Then "!" Center of mass of the 2 bodies is
at Earth’s center of mass"!" Center of mass is at one of
ellipse’s focal points"!" Other focal point is “vacant”"
r = p1+ e cos!
, m or km
! : True AnomalyAngle from perigee direction, deg or rad
46!

Properties of Elliptical Planetary Orbits"
e =ra ! rpra + rp
=ra ! rp2a
rp = a 1! e( ) ra = a 1+ e( )
a =ra + rp2
!" Eccentricity can be determined from apogee and perigee radii"
!" Semi-major axis is the average of the two"
47!
Properties of Elliptical Planetary Orbits"
b = rarp
p = a 1! e2( )
A = ! a b= !a2 1" e( ), m2
!" Semi-latus rectum, p, can be expressed as a function of a and e!
!" Semi-minor axis, b, can be expressed as a function of ra and rp!
!" Area of the ellipse, A, is!
48!

Next Time:!Precursors to Space Flight: #Rocket, Missiles, and Men in Space, Prophets with Some Honor,
Ch 4 (ER) !… the Heavens and the Earth, Introduction, Ch 1!
Orbital Motion: #Understanding Space, Ch 5!!
49!
!!uupppplleemmeennttaall MMaa""rriiaall##
50!

x2
a2 +y2
b2 = 1
a : Semi - major axis, m or kmb : Semi - minor axis, m or km
x !( ) = a cos !( )y !( ) = b sin !( )
! : Angle from x - axis (origin at center) rad
Equations that Describe Ellipses"
a! o!
b!y!
x!
51!
Constructing Ellipses"
F1P1 + F2P1 = F1P2 + F2P2 = 2a
String, Tacks, and Pen!
Hypotrochoid!Archimedes Trammel!
Foci (from center),
x fy f
!
"##
$
%&&
1,2
= ' a2 ' b2
0
!
"##
$
%&&, a2 ' b2
0
!
"##
$
%&&
52!

Ellipses"
Eccentricity, e = 1! b2
a2
b2
a2= 1! e; b = a 1! e
Semi - latus rectum ("The Parameter"),
p = b2
a, m
53!