Embed Size (px)
Citation preview

Final Report of Senior Design Project Spring 2003
The University of California at Riverside Department of Electrical Engineering
Software Defined Radio Receiver
Prepared by: John Cortes, Varoon Malhotra Faculty Advisor: Yingbo Hua
Submitted on: June 9, 2003

2
Abstract:
The purpose of this project was to design a Software defined radio receiver for a
select set of signals. Software Radio has recently become a major investment area. It
offers portability, because software is much easier media to change than hardware. It is
also easier to design new modulation and demodulation schemes.
For the beginning of this project, research was done to see what kind of signals
could be easily captured, and to see if any could be affordably interfaced with existing
sound cards on computers. We propose the details for design of a cheap RF front end, and
some details on writing demodulation schemes in software for AM radio, NTSC, and FM
signals.
The result of this project produced an RF Front End that is portable and a set of
Matlab scripts for running various demodulation schemes that are portable to a vector
processing type computer. The one thing we did not accomplish was being able to
interface our Front End, for both AM and FM reception, to our computer through the
sound card due to difficulties in amplifying the signal with too much noise.
Keywords: AM, FM, Quadrature Demodulation, VCO, PLL, NTSC, Software Defined Radio, USB, LSB
3
Table of Contents: Page: Chapter One – Introduction 1.1 Introduction 4 1.2 Historical Perspective 5 1.3 Glossary of Acronyms and Abbreviations 6 Chapter Two - Design and Technical Results 2.1 Problem Statement 7 2.2 Design Specifications 7 2.3 Overall Goals 9 Chapter Three - Method of Solution 3.1 Introduction 10 3.2 AM Modulation 10 3.3 AM Receiver 12 3.4 Solution for AM receiver: 16 3.5 FM Front End and Quadrature Demodulator 18 3.6 R/C (Radio Control) Car Transmitters and Receivers 21 3.7 NTSC signal Demodulation 26
Chapter Four – Evaluation 4.1 Introduction 30 4.2 Discussion of Results/ Test Plan 30 4.3 Design Comparison / Design Trade Off 32 Chapter Five – Administrative 5.1 Introduction 33 5.2 Budget and/or Cost Analysis 33 Chapter Six – Elements of Design 6.1 The Final Product 34 Chapter Seven – Conclusion 7.1 Introduction 35 7.2 Expansion and Improvement 35 Acknowledgements 36 References 37 Appendix A: Parts List 38 Appendix B: Equipment List 39 Appendix C: Software List 40 Appendix D: Special Resources 59 Appendix E: Schematic Drawings 60 Appendix F: Pictures of Receiver and Quadrature Demodulator 64
4
Chapter One - Introduction 1.1 Introduction: Software defined radio reflects the convergence of two dynamically developing
technological forces of the 1990s – digital radio and software technology. The former
facilitated the wireless revolution that gave birth to the mobile phone mass market whilst
the latter, over the same period, has both facilitated the Internet wave. The massive
growth and convergence of these two markets is both enabling new applications on
second (2G) and third generation (3G) mobile communications networks and
simultaneously changing the preexisting ground rules of the wireless industry.
A software radio is a radio whose channel modulation waveforms are
defined in software. That is, waveforms are generated as sampled digital signals,
converted from digital to analog via a wideband DAC and then possibly upconverted
from IF to RF. The receiver, similarly, employs a wideband Analog to Digital Converter
(ADC) that captures all of the channels of the software radio node. The receiver then
extracts, down converts and demodulates the channel waveform using software on a
general purpose processor. Software radios employ a combination of techniques that
include multi-band antennas and RF conversion; wideband ADC and Digital to Analog
conversion (DAC); and the implementation of IF, baseband and bitstream processing
functions in general purpose programmable processors. The resulting software-defined
radio (or "software radio") in part extends the evolution of programmable hardware,
increasing flexibility via increased programmability. And in part it represents an ideal
that may never be fully implemented but that nevertheless simplifies and illuminates
tradeoffs in radio architectures that seek to balance standards compatibility, technology
insertion and the compelling economics of today's highly competitive marketplaces.

5
1.2 Historical Perspective
Originally a military and academic problem, SDR has now come to be notice as
the future of wireless communications. The idea of software patches for enabling phones
to operation in different environments and standards seems as the survival of the next
generation of phones.
The idea of a pure software radio is to connect the A/D converter as close to the
antenna as possible. The rest of the design is to design the software to work in emulation
of the effects of hardware, and at the end produce a usable baseband audio signal of
interest. This idea, at this moment, is unfeasible due to the frequency coverage of current
global telecommunications. The A/D converter would have to work up to a rate of a
Giga-samples/sec and beyond. This is not really feasible so therefore it becomes of
interest to design a front-end to this system: a hardware system that is able to select the
proper portion of the radio spectrum and down convert the signal, via superhetrodyne
techniques, to a more manageable frequency where it may be sampled and converted to
digital.
Figure 1: Pure Software Radio Concept
6
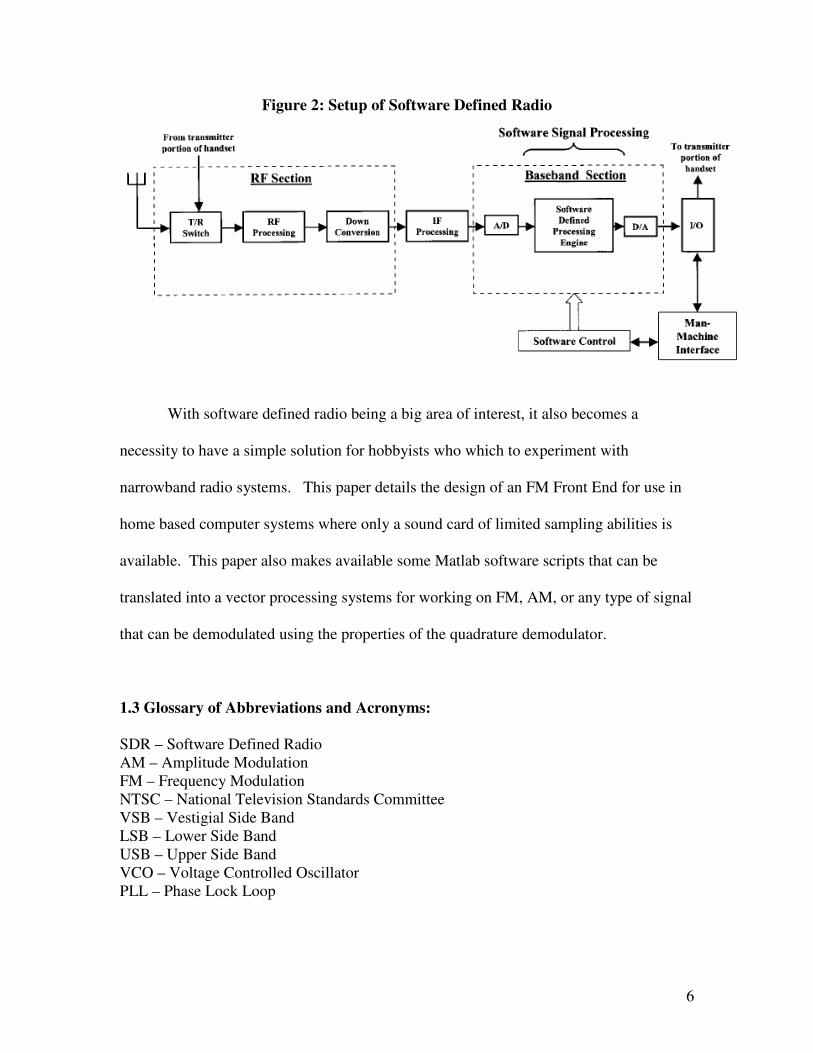
Figure 2: Setup of Software Defined Radio
With software defined radio being a big area of interest, it also becomes a
necessity to have a simple solution for hobbyists who which to experiment with
narrowband radio systems. This paper details the design of an FM Front End for use in
home based computer systems where only a sound card of limited sampling abilities is
available. This paper also makes available some Matlab software scripts that can be
translated into a vector processing systems for working on FM, AM, or any type of signal
that can be demodulated using the properties of the quadrature demodulator.
1.3 Glossary of Abbreviations and Acronyms: SDR – Software Defined Radio AM – Amplitude Modulation FM – Frequency Modulation NTSC – National Television Standards Committee VSB – Vestigial Side Band LSB – Lower Side Band USB – Upper Side Band VCO – Voltage Controlled Oscillator PLL – Phase Lock Loop

7
Chapter Two - Design and Technical Results:
2.1 Problem Statement
The goal of this project is to try and receive a radio signal by capturing that signal
through the sound card, then demodulating that signal in software, preferably in real time,
then output to the screen or audio the demodulated signal.
2.2 Design Specifications
For this project we are going to design a low cost solution for PC based hardware
radio. We will use an already common feature of computers to sample the signal: the
sound card. For this setup we will design the receiver system with hardware IF and
connect its output directly to one of the sound card’s input ports. From there we work on
the demodulation schemes for decoding Narrowband signals, preferably AM. If we get
these basics done quickly then we may continue to working on a tuner for FM signals,
and then work on a user interface for allowing of choosing a specific radio channel. If we
get everything working, then one of the final things we wish to accomplish is to be able
to decode regular NTSC TV signals.
Some of the framework for dealing with vector samples has been provided by the
GNU Radio project. This allows for a variety of software based demodulation schemes
to be conducted in any manner possible. The framework allows for the design of a
receiver. The project’s current work is being able to decode ATSC (Digital Television
signal) (edit: of which is now complete as of 6/2003).
8
The receiver will be designed to tune into specific frequencies and be able to
down convert the signal to an IF. From there we will sample the signal using the
soundcard of the computer system. Hopefully if everything is done correctly, the
sampled signal will be of good quality and will not have any aliasing in it; though it
seems that Narrowband signals are our only option right now.
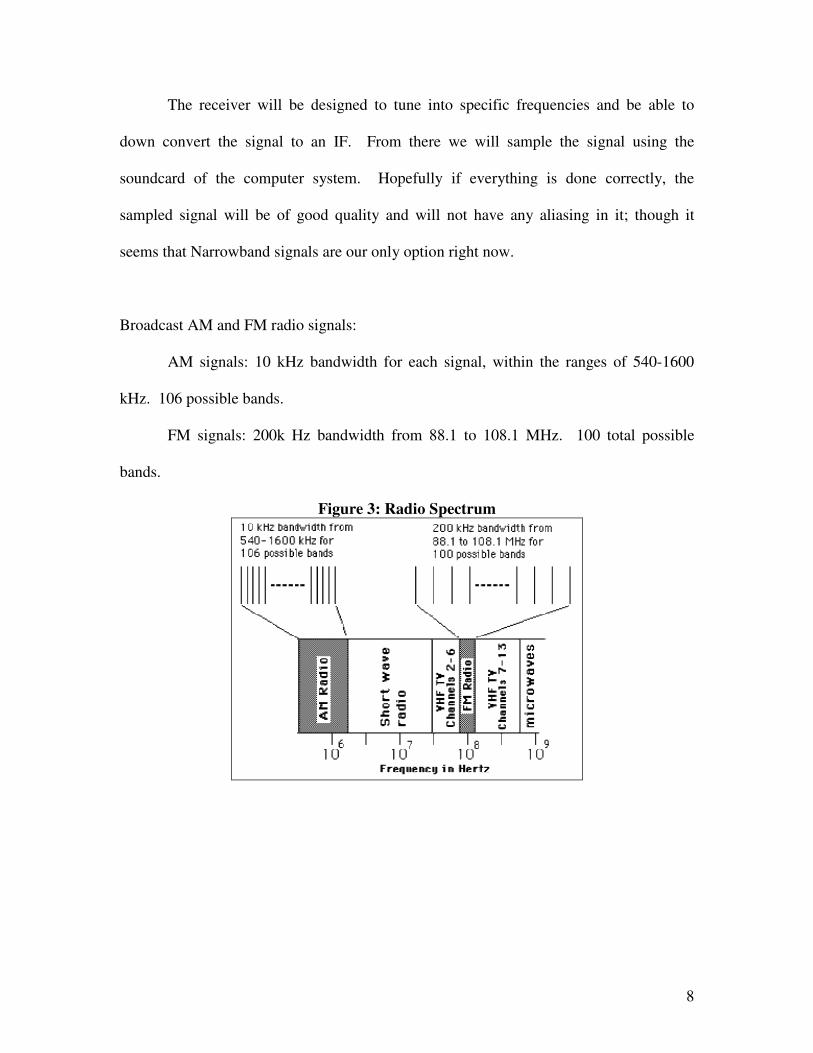
Broadcast AM and FM radio signals:
AM signals: 10 kHz bandwidth for each signal, within the ranges of 540-1600
kHz. 106 possible bands.
FM signals: 200k Hz bandwidth from 88.1 to 108.1 MHz. 100 total possible
bands.
Figure 3: Radio Spectrum

9
For the receiver and IF design, the design will be based on most of the work
developed by the American Radio Relay League (ARRL) society’s published material.
After the signal is sampled, depending on how fast the system performs, we will process
the signal using various DSP algorithms devised for demodulation of the signal. I/Q
channel separation, Digital IF, etc..., will all be emulated in software.
2.3 Overall Goals: The overall goal of this project is to have designed a working RF Front-End
system, this is reasonably low cost and not to difficult to build using off the shelf parts
and components easily orderable from Digi-Key and other IC providers. The system
design will allow it to be connected to any computer with reasonable audio capture
capabilities and design some software demodulation algorithms that will work for this
specific type of setup for working with AM and FM radio. We hope to contribute to the
some knowledge to the current workings of the GNU Software Defined Radio Project.

10
Chapter Three - Method of Solution:
3.1 Introduction:
The following set of materials describe the process of how we came up with the
AM Reciever, FM Front End, Quadrature Demodulator, and a description of the FM
transmitting system we purchased for testing our system. It also includes the information
on what we know about NTSC signals.
3.2 AM Modulation: The objective of modulation is to take a baseband signal that contains information
(voice, music, video, etc) and translate the signal to a new frequency so that it can be
transmitted easily and accurately over a communications channel. AM modulation is just
one of the different forms of modulation. AM has an output in which a carrier signal has
sideband energy generated by the modulation process added to or subtracted from the
carrier. The carrier is a steady unchanging signal and represents the middle of the
required communications channel. There is no information in the carrier, it is all in the
sideband signals. When one tunes in to a radio station the carrier frequency is the signal
you tune to.
If the baseband signal is m(t) then by multiplying this baseband signal by a cosine
wave at the carrier frequency the result is m(t) cos wct. This type of modulation shifts the
spectrum of m(t) to the carrier frequency. In this equation w is the frequency of the
modulating signal or baseband signal and wc is the carrier frequency.
m(t) cos (wct) <= > ½ [M(w + wc) + M(w-wc) ].

11
12
The upper sideband is (w+wc) and the lower sideband is (w-wc). Since AM has two
sidebands that are sopies of the original signal, the occupied bandwidth will be twice that
of the original signal. So for example if a baseband voice signal of about 3 kHz requires a
channel bandwidth of about 6 kHz.
3.3 AM Receiver:
To demodulate an AM signal you have to first downshift the signal to an
appropriate frequency. This is done by the process of mixing. Mixing is the same process
as Modulation for an AM signal. By multiplying the carrier with a local oscillator two
signals are produced; the sum and difference in frequency of the two inputs.
If the real carrier is y = cos(wot) and the local oscillator is cos(wt) when we mix these
two signals we get the product of the two inputs.
(cos wot) (cos wt) = [(e^jw0t + e^-jwot)/2] * [(e^jw0t + e^-jwot)/2]
= ¼ *[ [e^j(w + wo) + e^-j(w + wo)] + [e^j(wo-w)t + e^-j(wo-w)t] ]
= 1/2[ cos( wo + w)t + cos(wo-w)t]
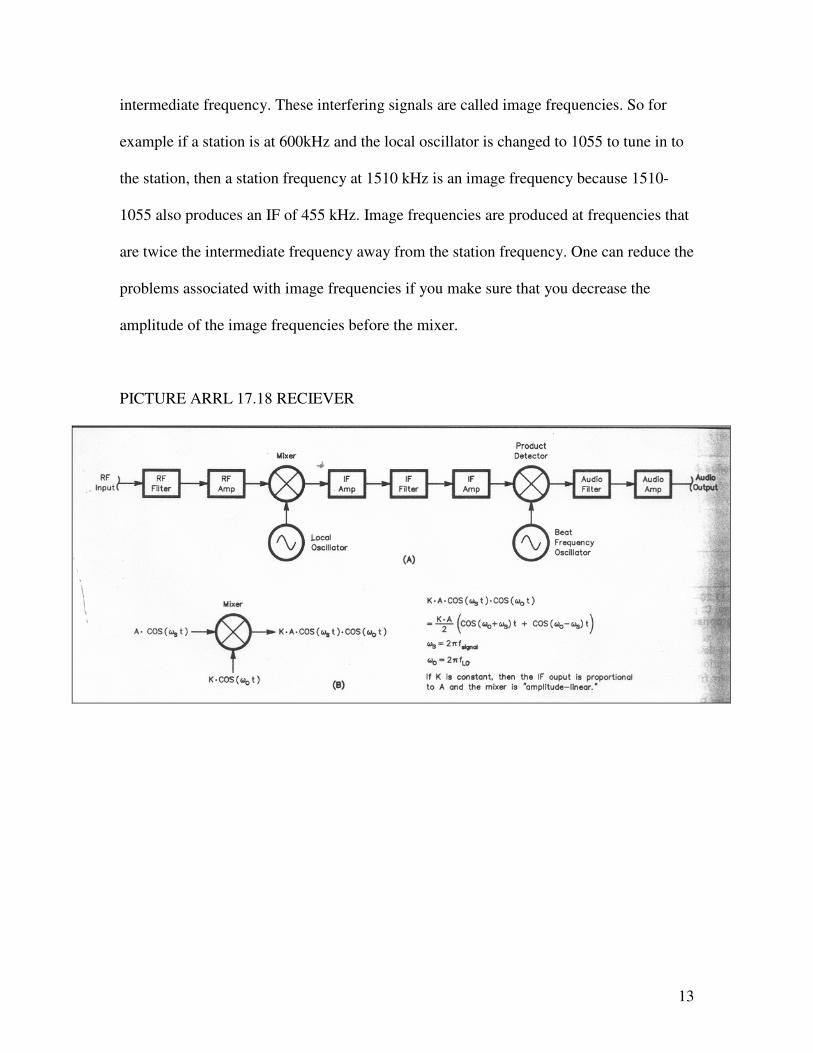
For AM radio broadcast the output of the mixer for the intermediate frequency is always
455 kHz. For example let’s say the broadcast station is at a frequency of 800 kHz( 800 on
an AM dial). Then in order for the output of the mixer to be at a frequency of 455 kHz it
has to be mixed with a local oscillator at a frequency of 1255 kHz. Because mixing
produces sum and difference frequencies of the station signal and the local oscillator
signal there is an opportunity of interfering signals that appear at the RF input to also
produce intermediate frequency signals at the mixer output. One of the signals of this
type is one at a frequency that is greater than the station frequency by twice the
13
intermediate frequency. These interfering signals are called image frequencies. So for
example if a station is at 600kHz and the local oscillator is changed to 1055 to tune in to
the station, then a station frequency at 1510 kHz is an image frequency because 1510-
1055 also produces an IF of 455 kHz. Image frequencies are produced at frequencies that
are twice the intermediate frequency away from the station frequency. One can reduce the
problems associated with image frequencies if you make sure that you decrease the
amplitude of the image frequencies before the mixer.
PICTURE ARRL 17.18 RECIEVER

14
The detector is used to demodulate the AM signal and produce the baseband signal from
the modulated signal. Detection translates the signal in the frequency spectrum back
down to the baseband frequency.
PICTURE ARRL AM DETECTION 15.8

15
3.4 Solution for AM receiver:
One of our goals was to be able to receive an AM signal and be able to
demodulate this signal using MATLAB. To demodulate an AM signal you have to take
the signal from the IF stage which is at 455 kHz. The problem was that we could not
demodulate the signal straight from the IF stage. An AM radio signal has a bandwidth of
10kHz so the total frequency range of the desired signal is from 450kHz – 460 kHz.
Therefore the maximum frequency present in the signal is 460 kHz. In order to
demodulate the signal directly one would need a 920 kHz sampler. This holds due to the
Nyquist criteria which states that in order to not lose information in a signal one must
sample the signal at a rate of twice the maximum frequency present in the signal. We are
using a soundcard as our A/D conversion unit and the soundcard works at 44.1 kHz. So in
order to not lose any information the signal that is sampled can’t be at a frequency higher
than 22.05 kHz.
We bought an AM receiver kit instead of building a receiver because we didn’t
want to run into the same problems that occurred with the FM receiver (for the RC car).
In order to not lose any information in the AM signal we had to first downshift the signal
at the IF (455 kHz) to about 15 kHz. Then we could easily use software demodulation
techniques in order to recover the baseband signal.
The problems occurred when we had to downshift the AM signal from the IF
frequency. In order to downshift the signal we used a voltage controlled oscillator and the
AM 455 kHz signal as inputs to a mixer.

16
It was very difficult to pick up any radio station due to the fact that the antenna
that the kit came with was poor. At most stations noise was all that was heard. The
voltage controlled oscillator was set to output a signal at 443 kHz. The VCO (voltage
controlled oscillator) was used as the low input for the mixer. The problem was that the
output of the mixer circuit would never be at the desired frequency. The output of the
mixer was just noise and no clean signal was seen when I analyzed this on the
oscilloscope. I added a low pass filter to the outputs of both the IF frequency and the
VCO to cancel unwanted signals. When viewed on the oscilloscope the output of the
VCO occurred in harmonics. In other words if there was a signal at 443 kHz then there
would also be a signal at 2*443kHz, 3*443kHz, etc. This is why we used a low pass filter
on the output of the VCO. The cutoff frequency for this filter was 443 kHz. We also used
a low pass filter for the output from the AM signal’s IF frequency. The cutoff frequency
for the filter was 460 kHz. The filters worked fine as was easy to see from the output on
the oscilloscope. The problem was that the voltage for both signals had to be the same for
the mixer to work correctly. If the voltages of both these signals differed by any amount
then the mixer would not function correctly.
The voltage level for the output of the VCO stayed at a fairly constant level of
approximately 1.4 volts, however the voltage at the output of the IF frequency fluctuated
drastically. Even if a clean signal was heard, the output fluctuated between a good signal
and noise very often. I believe that this fluctuation was ultimately the problem with the
circuit. The output voltage at the IF frequency was at times a few hundred millivolts and
at times was much higher. If the signal was looked at in the frequency domain on the
oscilloscope a clear peak was seen at 455 kHz but in the time domain the peak to peak

17
voltage amplitude was very unstable. We added an op-amp to amplify the output at the IF
frequency but this ultimately did not improve the situation. I believe that equipment was
the flaw in this aspect of the design. The AM receiver kit was not very good and that’s
why it was hard to pickup a good signal. It might have been possible to find another
mixer which outputs the difference of both frequencies even if the power is different in
both signals, but I’m not sure about this. More time was spent designing the FM receiver
for the RC car so maybe if there was more time better equipment could be bought for an
AM receiver. More knowledge of RF hardware design also would have helped in this part
of the design.
3.5 FM Front End and Quadrature Demodulator:
When we started out this project we found out from many papers that quadrature
demodulation was the best thing to go with. If a system has 2 lines for input, say like a
stereo line input for a computer, then quadrature demodulation will offer twice the
normal bandwidth of just a normal single channel system. In Gerald Youngblood’s
article, “A Software-Defined Radio for the Masses”, his system used a system similar to
the quadrature demodulator and had been demonstrated to work ok with a good sound
card sampler. Using his general layout of the system we decided to base our front end
system on it.
18
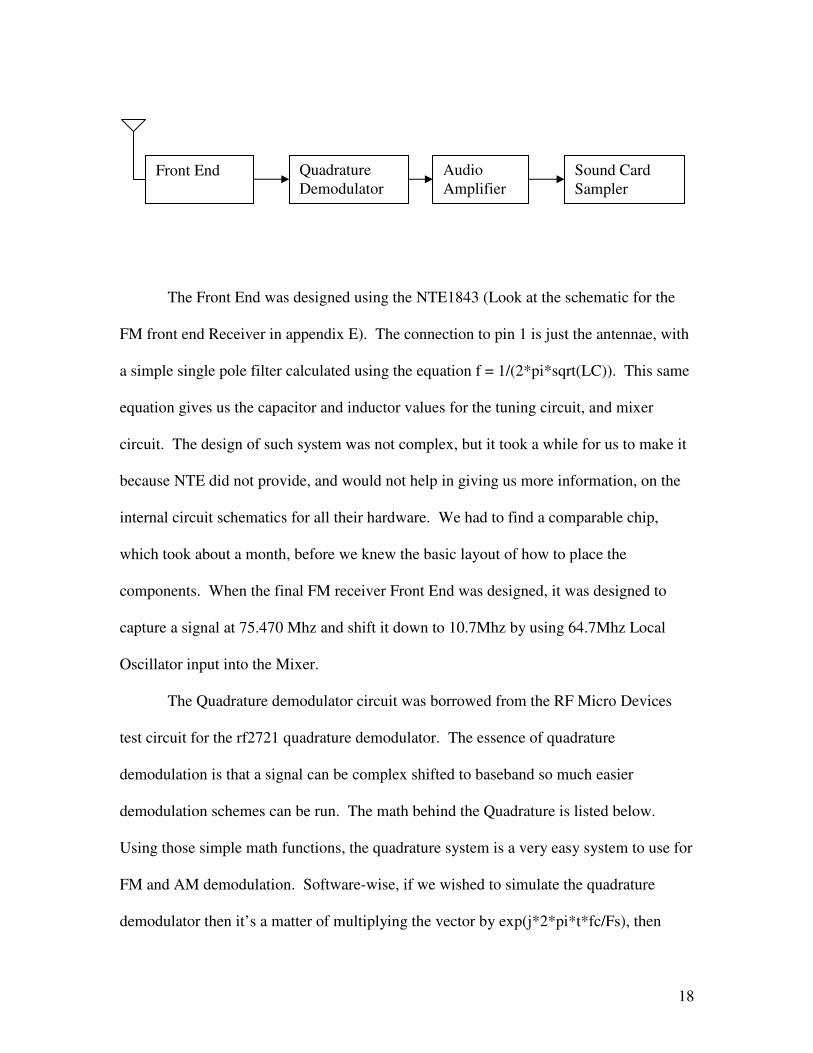
The Front End was designed using the NTE1843 (Look at the schematic for the
FM front end Receiver in appendix E). The connection to pin 1 is just the antennae, with
a simple single pole filter calculated using the equation f = 1/(2*pi*sqrt(LC)). This same
equation gives us the capacitor and inductor values for the tuning circuit, and mixer
circuit. The design of such system was not complex, but it took a while for us to make it
because NTE did not provide, and would not help in giving us more information, on the
internal circuit schematics for all their hardware. We had to find a comparable chip,
which took about a month, before we knew the basic layout of how to place the
components. When the final FM receiver Front End was designed, it was designed to
capture a signal at 75.470 Mhz and shift it down to 10.7Mhz by using 64.7Mhz Local
Oscillator input into the Mixer.
The Quadrature demodulator circuit was borrowed from the RF Micro Devices
test circuit for the rf2721 quadrature demodulator. The essence of quadrature
demodulation is that a signal can be complex shifted to baseband so much easier
demodulation schemes can be run. The math behind the Quadrature is listed below.
Using those simple math functions, the quadrature system is a very easy system to use for
FM and AM demodulation. Software-wise, if we wished to simulate the quadrature
demodulator then it’s a matter of multiplying the vector by exp(j*2*pi*t*fc/Fs), then
Front End Quadrature Demodulator
Audio Amplifier
Sound Card Sampler

19
running a simple FIR low-pass filter. A feat not to hard in software especially in
MATLAB.
Table 3.1: The math of Quadrature Demodulation
��������� ����
�������
���������� �
��
��
�� ��������
�� ��������
������ ���� ����
)()(
)())2sin()2)(cos((
))((/))(/)(arctan()(
)()(
)2sin()()()2cos()()(
2
2
22
fofXetx
etxftjfttx
tdtdFM
tItQt
tQtIAM
fttxtQ
fttxtI
ftj
ftj
−==+
Θ==Θ
+=
==
π
πππ
ππ

20
For the audio amplifier part of the circuit, we used low noise audio amplifier that we
purchased from Digi-Key, the LT1115 IC’s. The circuits were pretty self explanatory.
We used electrolyte capacitors to filter out the DC power, and we used a low pass non-
inverting setup, with frequency cutoff around 30Khz.
3.6 R/C (Radio Control) Car Transmitters and Receivers:
Since I was already using a pre-made FM transmitter, we had to learn as much as
we could about the specifications about how the FM transmitter was designed and how it
functions. I purchased an R/C transmitter and receiver system from Tower Hobbies, the
Hitec Ranger III FM 3 channel Transmitter and Receiver.
21
R/C Transmitter Features and Specifications Transmitter:
- 3 Channel FM Proportional Radio Control System - Servo Reversing for Channels 1 and 2 - Proportional 3rd Channel Slide Control - Adjustable Travel Volume for Channels 1 and 2
Receiver: - HFS-03MM, 3 Channel FM Receiver - Narrow Band - Single Conversion
Servos:
- Standard Servos - Require 3-5Vpk-pk square wave pulse. - Pulse duration from 0.9ms to 2.1ms, 1.5ms as center - Pulse refreshes required ever 50Hz (20ms)
We tested this FM transmitter because we found out that the signal bandwidth
was 20 KHz. It is a number well within range of what we needed for sampling on our
sound card (which had a Nyquist Sampling rate of 22Khz). The design of the FM receiver
is listed in Appendix E: FM Receiver Front End schematic. The first part of the design
was to design the antennae receiver portion for the proper carrier frequency. The carrier
frequency is listed by the Manufacturer as 75.470 Mhz (channel 64). The carrier
frequency is selectable based on the frequency of the crystal the customer purchases. The
following is that selectable channel number (CHx)
Frequency = 74.190Mhz + 0.02Mhz*(CHx)

22
R/C Transmitter Specs: From Data Acquisition to FM Modulation and
Transmission
Analog Pot. Control Stick 0 – 5V range, centered at 2.5V
Read 3 channels into Microcontroller using A/D and compare to 2.5V in software (2.5 V considered as center = 1.5ms pulse width)
Allot 0.9 to 2.1ms of pulse time to each channel on the 20ms stream
FM modulate signal around a center frequency, 10.7Mhz
Shift spectra to a specified frequency chosen by the manufacturer’s crystal set (79.470Mhz)
2.0 ms = 5.0 V 1.5 ms = 2.5 V 1.0 ms = 0.0 V PW = 1.5*voltage + 1ms
Pulse Stream output reading channels sequentially and leaving empty space until 50Hz synchronization
Hardware Software/ MicroController

23
R/C Receiver Specs: From Reception to Final Output
Receive Signal at 79.470 Mhz, and Shift Down to 10.7Mhz
Hardware Software/ Microcontroller
FM Demodulate Signal at 10.7Mhz
Amplify Signal into a sharp Square Wave using a Voltage Comparator to convert into 50Hz 5Vpk-pk
Synchronize signal to 50Hz and do Input Capture on rising edges
Channel 1 = 1st edge Channel 2 = 2nd edge Channel 3 = 3rd edge Sync to 20ms
Output each Channel to difference Output ports on microcontroller
Each output port is fed into individual servos

24
Pulse Width Information:
Figure X: Servo Signals and FM Receiver Signals for Positive and Negative Shift Modulation
Positive Shift Modulation: Approximately 1ms to 2ms total pulse with time so therefore 0.5us dedicated up Pulse time, with rest of time filled in as 0. Negative Shift Modulation: Vice versa of Positive Shift Modulation. In order to decode this in software, the properties of the microcontroller must be
able to sync to the 50Hz signal from the r/c car transmitter. In Matlab it’s a matter of
being able to count the proper number of steps in the signal given the proper sampling
rate. Since most of the hardware was not working until near the end of the quarter, we
decided to simulate the pulse stream by reading the output directly into the HC11 then
mixing the signals and sending the final output stream to MATLAB. Appendix C lists
Servo 1
Servo 2
Servo 3
Pulse Train +Shift Modulation
Pulse Train -Shift Modulation

25
the PulseStream.h and PulseStream.cpp files that were generated to work with the Analog
outputs of the HC11 and simulate the FM transmitter, before modulation, and then the
output is applied to the sound card. Beyond that, since we were near the end, we decided
not to demodulate the pulse stream and therefore decided to dedicate more of our time
towards demodulation of the NTSC signal.
3.7 NTSC signal Demodulation:
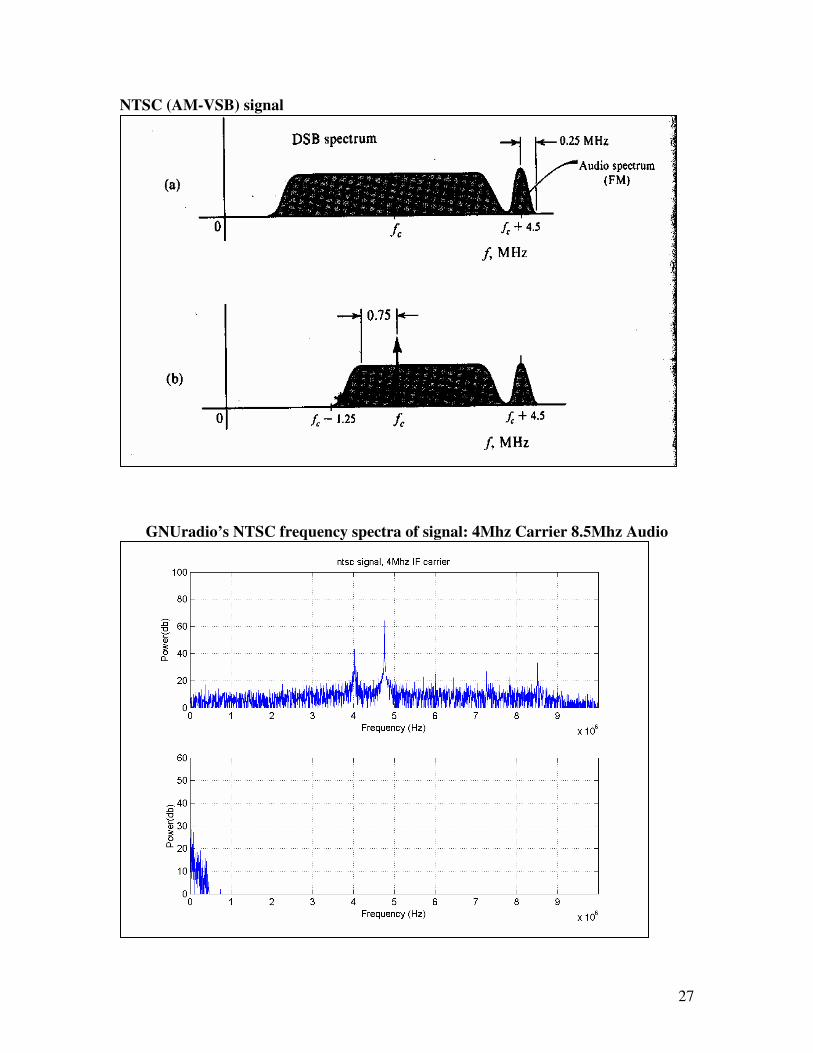
NTSC is a special type of AM modulation that cuts of a portion of the lower
sideband, aka vestigial sideband modulation, and then attaches a carrier frequency to the
signal and an fm audio signal signal at 4.5MHz + carrier frequency. The demodulated
signal consists of a monochrome signal plus a quadrature modulated color component.
For our system we worked directly in software, and our NTSC data was provided from
the gnuradio’s leader: Eric Blossom.
NTSC Information: 525 Lines, VBI after 525/2 Lines 525 elements per line Interlaced frames at 60Hz 1 picture transmitted at 30Hz Bandwidth of 4.1Mhz essential information In order to demodulate the signal, first a quadrature demodulator is run at the
4Mhz carrier frequency. The signal is then processed through a Low Pass filter of
0.5Mhz, so only the monochrome (grayscale image stays). The final signal is then passed
through a syncing detector that first detects the VBI (Vertical Blanking Interval) then
starts capturing the Horizontal information on each of the horizontal peaks. The
grayscale information is mapped from one horizontal peak to the next. The Matlab code
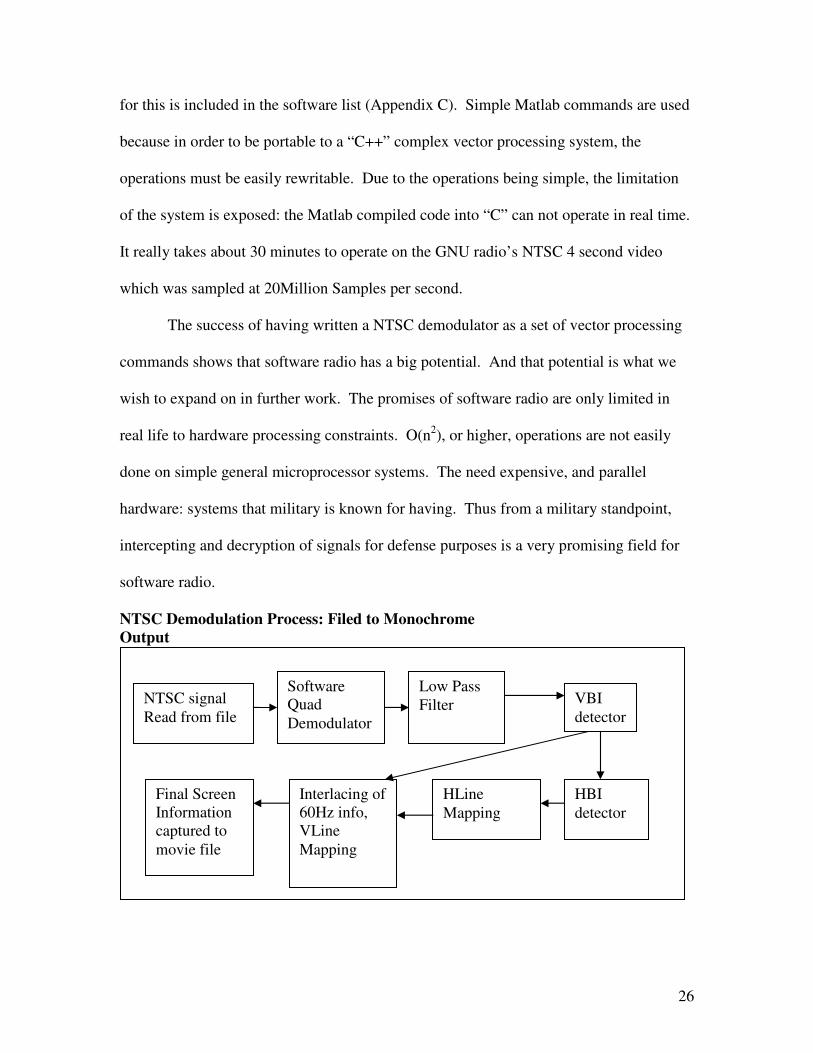
26
for this is included in the software list (Appendix C). Simple Matlab commands are used
because in order to be portable to a “C++” complex vector processing system, the
operations must be easily rewritable. Due to the operations being simple, the limitation
of the system is exposed: the Matlab compiled code into “C” can not operate in real time.
It really takes about 30 minutes to operate on the GNU radio’s NTSC 4 second video
which was sampled at 20Million Samples per second.
The success of having written a NTSC demodulator as a set of vector processing
commands shows that software radio has a big potential. And that potential is what we
wish to expand on in further work. The promises of software radio are only limited in
real life to hardware processing constraints. O(n2), or higher, operations are not easily
done on simple general microprocessor systems. The need expensive, and parallel
hardware: systems that military is known for having. Thus from a military standpoint,
intercepting and decryption of signals for defense purposes is a very promising field for
software radio.
NTSC Demodulation Process: Filed to Monochrome Output
NTSC signal Read from file
Software Quad Demodulator
Low Pass Filter VBI
detector
HBI detector
HLine Mapping
Interlacing of 60Hz info, VLine Mapping
Final Screen Information captured to movie file
27
NTSC (AM-VSB) signal
GNUradio’s NTSC frequency spectra of signal: 4Mhz Carrier 8.5Mhz Audio

28
NTSC demodulated signal : Horizontal & Vertical Syncing information
Demodulated NTSC time domain signal: Peaks represent Horizontal Syncs
29
Chapter Four – Evaluation
4.1 Introduction
We wanted to rest each part individually and see how the operate as a functioning
unit. If the meet the specs then all parts were to be combined, and interfaced. We had
three functioning units to test: the FM receiver, the Quadrature Demodulator, the
interface to the computer through the computer’s sound card.
4.2 Discussion of Results/ Test Plan
The hardware quadrature demodulate was a fine piece of material. To test it we
applied to signals, both of some frequency difference so that we would expect the
frequency mixing to work. When mixing two cosine signals, the expected output has
signal peaks at the sum and difference of the frequencies. Example: if we mix a signal of
75Mhz with a signal of 65MHz, the expected output should have a signal with peak
centered at 10Mhz( 75Mhz -65Mhz) and 140Mhz( 75Mhz + 65Mhz).
The rated specs of the quadrature list that a Local Oscillator x 2 must be applied
to the LO input of the rf2721 input; the chip divides the Local Oscillator frequency by
two so that it doesn’t leak into the output. The rated specs of the chip state that the inputs
must have a 100mv pk-pk input for both the low and the RF-IF. We tested the circuit
giving multiple range of frequencies, and the output matched what we expected when
mixing two signals of equal strength. The quadrature proved itself to work just fine, and
assuming we gave it the proper mixing frequency, the expected output would be correct.
For our computer system, we had to if each of the lines gave a descent input with
the sound card. To test it we decided to use the Matlab Data Acquisition Toolbox and
30
run the fft_demoai.m file to see the FFT spectra of the signal along with the real time
signal. One thing we discovered near the end was that the sound card, even though we
selected to input on 2 lines, the system was of low quality that the Left Channel leaked
into the Right channel, and vice versa for the Right Channel. Due to this problem we
decided to forgo using the hardware PCB quadrature demodulator because we would
never get a 2 channel system working, therefore we wrote the quadrature demodulate in
the software, which is only about 2 lines of Matlab code.
The FM Receiver had to receiver a power signal at 75.470Mhz and then had to
shift the signal to 10.7Mhz. Even though no images of the shifted output are included,
the NTE1843 did its job; all we had to do was supply the proper biasing voltage and
shunting capacitors, plus the LC values for each of the tuning and mixing circuits.
Since our Quadrature Demodulator didn’t work, we decided to instead use and
NTE1103 mixing circuit for mixing the signal down to near DC values; a frequency
where the sound card could pick it up. We didn’t use the quadrature demodulator single
I(t) output to the sound card because when we tried amplifying the output, the amplifiers
gave a lot of noise. We spent most of the second quarter trying to debug how to lower
the noise, but it came to no avail. We next tried the NTE1103 because it had a better
noise resilience, but in the end it ended up acting terribly because the amplification our
sound card required was well beyond 100x and the amplifier setup we designed couldn’t
accept a gain of that much and expect to fight noise in the same time.
One problem of why we couldn’t interface our FM receiver, then mix the signal
down to near-DC frequencies was that the noise of the system increased exponentially as
we came closer to DC, especially at 11.05Khz. One type of noise is listed as the 1/f

31
noise, ie: noise increases as you decreased the frequency. The same thing happened
when we tried mixing the AM signal of 455Khz to 11.05Khz, there was just too much
noise. Noise was our major problem, and if we could have gotten the noise suppressed
and a descent amplifier with large gain built, I believe we could have accomplished our
goals of this project for designing a narrowband FM and AM receiver.
On the software side, the scripts are provided and were tested using the GNU
radio’s library of sampled data. The had a couple of examples of FM modulated signals,
and one NTSC signal, along with an ATSC (hdtv) signal. The software portion of the
project worked just fine if we applied normalization to the signal.
4.3 Design Comparison/ Design Trade Off
What we did manage to complete was a set of Matlab scripts which were able to
read from a specific file and then demodulate the output using the software version of
quadrature demodulation. The output could then be AM demodulated, (gain of the
complex baseband signal) or FM demodulated (derivate of the phase of the signal, simple
FM demodulator shown on the Software Attachement: process_file.m). Since we had a
working AM demodulator, we designed a simple NTSC demodulator; the code is
provided.

32
Chapter Five – Administrative
5.1 Introduction
For this project we didn’t really want to spend a lot of money on hardware. One
of our initial specs was to work as little as possible on hardware, and write as much as
possible on software. In the end it didn’t turn out that way.
5.2 Budget and Cost Analysis:
We set up our budget at around $100. It was a reasonable sum to work from.
Each of the chips we purchased was around $5 each. We purchased most of the
capacitors from Electronics Warehouse for about $6. The resistors, we found available in
the EE communications lab cabinet for free. The RF2721 Quadrature demodulator we
got for free at RFmicro Devices (rfmicro.com). The TI CD74HC7046A VCO we got for
free at www.ti.com. The total parts price came out to $57, for the FM front end and
Quadrature Demodulator circuits. It was well within our rules for designing our FM
Front End.
Near the end of our project we couldn’t get the FM interfacing to work so we
decided to purchase an AM receiver circuit and use the 455Khz IF output. The kit cost
$35.
The final parts list came out to $97.

33
Chapter Six – Elements of Design
6.1 The Final Product
The outcome of this project produced a working FM receiver for any frequency
band that can be tuned down to 10.7 Mhz. The working system can, for aesthetic
qualities, be miniaturized to co-exist with the quadrature demodulator as a single chip
system powered by a 9v battery supply.
The only problem with SDR, on the ethics front, is that it if a transceiver design is
produced then any frequency band of choice is open for transmission and thus will cause
problems with the FCC. It would be advisable for the user of the system to consider
getting a ham license for operator of such equipment, for the right to transmit on the ham
frequencies.
The social impacts of this product are not easily identifiable, though the Software
Defined Radio concept has been creeping up in years and is demonstrated today on the
cellular networks, a very important part of many people’s lives. As for other design
factors, since the final product could not be completed, and the working model was
designed to work on a select set of frequencies there were no other easily identifiable
safety and economic factors.
34
Chapter Seven – Conclusion
7.1 Introduction:
In the area of SDR, there is no complete set of tools that can be easily design. A
working system must be specific on what type of signals the user is willing to decode,
and what range of frequencies the user wishes to work on. In our case we wanted to
decode a FM and AM narrowband signals,
We tried interfacing the outputs from the receiver circuits, but interfacing these
signals to our sound card could not be completed because of too much noise. Since we
wanted to demonstrate the functionality of SDR we chose to decode an NTSC raw signal.
Decoding of the signal was accomplished, at least for the monochrome signal. The
success of this proved to us, that SDR is a very good field of work which has lots of
potential because of it’s feasibility and portable setup.
7.2 Expansion and Improvement:
An idea for improvement of this project would be in the future to totally bypass
most of the capturing on the computer. A separate RF Front End programmable module
that sends a quadrature demodulated signal down a USB2 or IEEE1394 port. One would
need to look at special DSP chips and build the surrounding circuitry, which in itself is
another senior design project.

35
Acknowledgements
Thanks to Dr. Yingbo Hua for helping guide us on our project. Thanks to the EE175 professors for making this a wonderful course. Thanks to Dan Giles for helping us on the Cadence set of programs, and for producing our quadrature demodulator PCB, and also finally for being just a technical reference for most of us. Thanks to Eric Blossom for making the radio samples available online at www.comsec.com, especially the NTSC signal. Without those samples, it would have been impossible to write up any code to test our hypothesis.

36
References [1] Read, Dana G. The ARRL Handbook For Radio Communications, CT: The American Radio Relay League, 2003. [2] Jesme, Ron, Micro R/C Receiver, 3M Company. [3] Bowick, Chris. RF Circuit Design, MA: Elsevier Science, 1997. [4] B.P. Lathi, Modern Digital and Analog Communications Systems, New York, Oxford University Press, 1998. [5] D. Pulley, B. Rupert, “A Total Cost Approach to Evaluating Different Reconfigurable Architectures for Baseband Processing in Wireless Receivers,” IEEE Communications Magazine, Vol. 41, No. 1, pp. 105-113, 2003. [6] Tuttlebee, Walter. Software Defined Radio, John Wiley & Sons, Ltd. 2002, ISBNs: 0-470-84318-7 (Hardback); 0-470-84600-3 (Electronic). [7] Tuttlebee, Walter. Software Defined Radio: Origins, Drivers and International Perspectives. John Wiley & Sons, Ltd. 2002 ISBNs: 0-470-84464-7 (Hardback); 0-470-84601-1 (Electronic). [8] G. Youngblood, “A Software-Defined Radio for the Masses, Part 1”, QEX magazine, American Radio Relay League, July/August 2002
37
Appendix A: Parts List
AM Radio Receiver: AM-550K AM Radio Kit Audio Amplifiers: C11, C12, C14, C15 0.1uF C3, C2 0.01pF R5, R6 3.3K BNC Connectors LT1115 Low Noise Audio Amplifiers FM Front End: R1 10K R3 1K L1 1.6uH C1 2.8pF C0 1000pF R2 22ohm C3 15pF C4 2-5pF L2 300nH C2 1000pF C5 30pF C6 56pF L3 0.33uH C7 2-5pF Quadrature Demodulator: R7, R8 50ohms C15, C16 100nF
38
Appendix B: Equipment List: Standard IBM-compatible computer AMD Athlon 1700+ (1433Mhz) 40GB Seagate Hard Drive Asus A7N266-VM AA NVIDIA nFORCE 220 Chipset 266/200MHz with AC’97 Sound Card Device (Line In, Line Out, Mic In) HP 54600B Oscilloscope Tektronix TDS 340 Digital Oscilloscope HP 33120A Function Generator HP E3630A Triple Output Power Supply

39
Appendix C: Software List Matlab v6 GNU c++ compiler Cadence Pspice
40
File: PulseStream.h // PulseStream.h, file for generating R/C transmitter pulse position // output on the 68hc11 #include "int6811.h" #include "intr6811.h" #include "io6811.h" #include "stdio.h" // Type definitions, for avoiding having to // type the long name typedef unsigned int uint; typedef unsigned char uchar; // uchar value to read from A/D port #define CH1 ADR2 #define CH2 ADR3 #define CH3 ADR4 // Convert specific Channel to millivoltage, // of type uint, with max Voltage = 5V #define CH1_mv (uint)(CH1*(5000.0/255)) #define CH2_mv (uint)(CH2*(5000.0/255)) #define CH3_mv (uint)(CH3*(5000.0/255)) // Convert Channel to pulse width, of range // 1ms (1000us) to 2ms (2000us) // PulseWidth(ms) = (1/255)*ChannelValue + 1ms #define CH1_us (uint)(CH1*(1000.0/255) + 1000.0) #define CH2_us (uint)(CH2*(1000.0/255) + 1000.0) #define CH3_us (uint)(CH3*(1000.0/255) + 1000.0) // OC3, interrupt handler #define JMP_OC3 *((unsigned char *) 0xD9) #define ISR_OC3 *((unsigned int *) 0xDA) // Flags for the interrupt #define TCTL1_OC3_LOW 0x20 #define TCTL1_OC3_HIGH 0x30 #define TFLG1_OC3 0x20 #define TMSK1_OC3 0x20 // Returns the width for specific time uint getWidth(void); // returns index into DownPulses[] array uchar getIndex(uint value); // Self explanitory uint getCH1Width(void); uint getCH2Width(void); uint getCH3Width(void);

41
// Array of Pulse times, converse to 0.5us up Pulse const uint DownPulses[] = { 1000,1200,1400,1600,1800, 2000,2200,2400,2600,2800, 3000 }; // Constant Up Pulse Time const uint UpPulse = 1000; // Total Pulse time that can be taken by multiplexing the // signals, 20ms(50Hz) = 40000 Pulses at 5e-7seconds const uint TotalPulseWidth = 40000; // Temp variables for counting uint current_cnt = 0; uint taken_width = 0; // Pulse Width time are stored into these values // only being read in the while(1) of main(void) uint CH1_width = 0; uint CH2_width = 0; uint CH3_width = 0;

42
File: PulseStream.cpp #include "pulseStream.h" // Interrupt handler for OC3 to output // multiplex Pulse Stream :) interrupt void oc3_handler(void) { TFLG1 |= TFLG1_OC3; TOC3 = TCNT + getWidth(); } // Returns Pulse Width for current status of // Multiplexing uint getWidth(void) { uint return_value =0; current_cnt++; // Stream is as follows: // 1 2 3 4 5 6 7 8 20ms // ___ ___ ___ ___ // __| |___| |___| |___| |______________| switch(current_cnt) { // ----------------- // ----SERVO #1----- // ----------------- // Current spot is #1, generate 0.5us Up Pulse case 1: taken_width = 0; TCTL1 = TCTL1_OC3_LOW; return_value = UpPulse; break; // #2, Generate Rest of Pulse Time = PulseTime - 0.5us, // but read from table directly case 2: TCTL1 = TCTL1_OC3_HIGH; return_value = CH1_width; break; // ----------------- // ----SERVO #2----- // ----------------- case 3: TCTL1 = TCTL1_OC3_LOW; return_value = UpPulse; break; case 4: TCTL1 = TCTL1_OC3_HIGH; return_value = CH2_width; break;
43
// ----------------- // ----SERVO #3----- // ----------------- case 5: TCTL1 = TCTL1_OC3_LOW; return_value = UpPulse; break; case 6: TCTL1 = TCTL1_OC3_HIGH; return_value = CH3_width; break; // ---------------------------------------- // Random Up Shot Pulse that signifies // when Servo #3 is finished // ---------------------------------------- case 7: TCTL1 = TCTL1_OC3_LOW; return_value = UpPulse; break; case 8: TCTL1 = TCTL1_OC3_HIGH; return_value = TotalPulseWidth - taken_width; //printf("%x\n", return_value); current_cnt = 0; break; // Only if an error happens, // temperature problems, Hell on earth, EMP ... default: printf("ERROR\n"); current_cnt = 0; break; } // Keep track of Total Pulse Width, last pulse is // rest of 40000 pulses taken_width += return_value; return return_value; } // Pointer to Pulse Width Pulses, given // pulse width in microseconds uchar getIndex(uint value) { if( value <= 1000 ) return 0; else if( value <= 1300 && value >1000) return 0;//return 3; else if( value <= 1400 && value >1300) return 3;//return 4; else if( value <= 1500 && value >1400) return 5; else if( value <= 1600 && value >1500)

44
return 7;////return 6; else if( value <= 2000 && value >1600) return 10;//return 7; return 0; // This part intentionally commented out // so that Searching time is much smaller, // but proportionally it works just fine, // unless the ATV is readjusted, // Croc hunter's voice: "bad...bad...bad" /* else if( value <= 1100 && value >1000 ) return 1; else if( value <= 1200 && value >1100) return 2; else if( value <= 1300 && value >1200) return 0;//return 3; else if( value <= 1400 && value >1300) return 3;//return 4; else if( value <= 1500 && value >1400) return 5; else if( value <= 1600 && value >1500) return 7;////return 6; else if( value <= 1700 && value >1600) return 10;//return 7; else if( value <= 1800 && value >1700) return 8; else if( value <= 1900 && value >1800) return 9; else if( value <= 2000 && value >1900) return 10; return 0; */ } // Just a random wait time void wait(void) { uint i=0; for(i=0; i<40000; i++); } // Initializations void init(void) { // Set OC3 interrupt flag TMSK1 = 0x20; // Clear oc3 flag

45
TFLG1 |= 0x20; // set next output to zero TCTL2 = 0x20; // Point to interrupt handler for this // function JMP_OC3 = 0x7e; ISR_OC3 = (unsigned int) oc3_handler; enable_interrupt(); } void main(void) { // Activate A/D ports, works on ports PE4 - PE7 ADCTL = 0xB7; // Wait till CCF flag set (A/D conversion done) while( (ADCTL&0X80) != 0x80 ); //printf("sizeof long = %d\n", sizeof(long)); //printf("Sizeof short = %d\n", sizeof(short)); //printf("Sizeof int = %d\n", sizeof(int)); //printf("TMSK2 = %x\n", TMSK1); init(); while(1){ // Read, Convert, and Decipher the // channel pulse width CH1_width = DownPulses[getIndex(CH1_us)]; CH2_width = DownPulses[getIndex(CH2_us)]; CH3_width = DownPulses[getIndex(CH3_us)]; //printf("%d\r", CH3_width); }; /* while(1){ wait(); printf("--------------------\n"); printf("Ch1 = %d mv | %d us | %d \n", CH1_mv, CH1_us, DownPulses[getIndex(CH1_us)]); printf("Ch2 = %d mv | %d us | %d \n", CH2_mv, CH2_us, DownPulses[getIndex(CH2_us)]); printf("Ch3 = %d mv | %d us | %d \n", CH3_mv, CH3_us, DownPulses[getIndex(CH3_us)]); } */ }
46
File: ConvertToWave.m function ConvertToWave(filename_in)%, val_id) % Convert elements in given file to wave output, for playing on sound system % Good for playing back demodulated FM signal %%%%%%%%%%%%%%%%%%%%%%%% % open file for reading %%%%%%%%%%%%%%%%%%%%%%%% filename_read = filename_in; fid_read = fopen(filename_read, 'r'); if fid_read < 1 error = 1; disp(sprintf('file %s not opened', filename_read)); return; else disp(sprintf('file %s opened', filename_read)); end cnt = 1; elements = 0; N = 512; Fs = 40000; x_values = Fs*[0:1/N:1-(1/N)]; [y cnt] = fread(fid_read, 200000, 'double'); if( cnt > 0) % cutoff early compoents m = y(500:cnt); % normalize values l = max( abs( [max(m) min(m)])); m = m/l; figure; subplot(2,1,1); plot(x_values, 20*log10(abs(fft(m,N)))); axis([0 Fs/2-1 -100 100]); subplot(2,1,2); plot(m); end % while(cnt > 0) % % [y cnt] = fread(fid_read, 200000, 'double'); % elements = elements + cnt; % if( cnt > 0) % m = y; % figure(1); % plot(x_values, 20*log10(abs(fft(y,N)))); % axis([0 Fs/2-1 -100 100]); % end

47
% % end disp(sprintf('read %d elements', elements)); fclose(fid_read); wavwrite(m,40000,sprintf('%s.wav',filename_read)); disp('finished reading elements'); File: process_file.m function [return_value] = process_file(filename_in, filename_out, frequency_center, Fs) % filename_in = 'fm95_5.dat'; % filename_out = 'as.dat'; % frequency_center = 7.15e6; % Fs = 20e6; %%%%%%%%%%%%%%%%%%%%%%%% % open file for reading %%%%%%%%%%%%%%%%%%%%%%%% filename_read = filename_in; fid_read = fopen(filename_read, 'r'); if fid_read < 1 error = 1; disp(sprintf('file %s not opened', filename_read)); return; else disp(sprintf('file %s opened', filename_read)); end %%%%%%%%%%%%%%%%%%%%%%%%% % open writing output to %%%%%%%%%%%%%%%%%%%%%%%%% filename_write = filename_out; fid_write = fopen(filename_write, 'w'); if fid_write < 1 error = 1; disp(sprintf('file %s not opened', filename_write)); return; else disp(sprintf('file %s opened', filename_write)); end %%%%%%%%%%%%%% % Parameters %%%%%%%%%%%%%% TRUE = 1; FALSE = 0; DFT_size = 1024*5; Sampling_Frequency = Fs; Samples_Per_Process = 40000; Do_DFT = TRUE;

48
return_value = -1; Fs = Sampling_Frequency; Samples = Samples_Per_Process; N = DFT_size; Center_Frequency = frequency_center; first_decimate = 125; second_decimate = 4; first_Fs = Fs/first_decimate; second_Fs = first_Fs/second_decimate; disp(sprintf('%s being processed', filename_in)); disp(sprintf('Fs = %d, Cf = %d', Sampling_Frequency, Center_Frequency)); disp(sprintf('CFIR = %d, quad_rate = %d', first_decimate, first_Fs)); disp(sprintf('RFIR = %d, audio_rate = %d', second_decimate, second_Fs)); last_read_size = 0; counter = 0; cnt = 1; c = 0; % [N_b,W_b] = buttord(0.16,0.22,0.5,40); % [B,A] = butter(N_b,W_b); [N_tv, W_tv] = buttord(0.03, 0.05, 0.01, 20); [B_tv, A_tv] = butter(N_tv,W_tv); % B_tv = fir1(N_tv, W_tv, 'low'); % A_tv = 1; % Quadrature Demodulation in one Line :-O z = exp([0:Samples-1]*2*pi*j*(Center_Frequency/Sampling_Frequency)); % z = real(z); dec_value = 1; normalized_once = FALSE; while( cnt>0) counter = counter + 1; [v cnt] = fread(fid_read, Samples, 'uint16'); last_read_size = last_read_size +cnt; if( normalized_once == FALSE ) normalized_once = TRUE; [y, slope, b]= normalize_data(v); else y = slope*v + b; end if( cnt > 0) %len = length(y); %v = [0:len-1]; % frequency shift q = z(1:length(y)).*y'; %r = abs(m);%decimate(m, 2);

49
r = filter(B_tv, A_tv, q); m = amplitude_demodulate(r); %m = decimate(m,dec_value); % m = decimate(q, first_decimate);%, 'FIR'); % %m = filter(B,A,m); % %phi = angle(x); % Get angle % %phi = angle(m); % % Do first difference using filtering [1 -1] % fm_vector = fm_demodulate(m); % % % %fm_vector = filter(B,A,fm_vector); % l = decimate(fm_vector, second_decimate);%, 'FIR'); c = fwrite(fid_write, m, 'double') + c; if( Do_DFT == TRUE ) figure(2); Fs = Sampling_Frequency; x_values = Fs*[0:1/N:1-(1/N)]; subplot(2,1,1), plot(x_values, 20*log10(abs(fft(y,N)))); %title(sprintf('%d/%d samples, step %d, Fs = %d', cnt, Samples, counter, Fs)); title('ntsc signal, 4Mhz IF carrier'); axis([0 Fs/2-1 0 100]); grid on; xlabel('Frequency (Hz)'); ylabel('Power(db)'); Fs = Sampling_Frequency; x_values = Fs*[0:1/N:1-(1/N)]; subplot(2,1,2), plot(x_values, 20*log10(abs(fft(m,N)))); axis([0 Fs/2-1 0 60]); grid on; xlabel('Frequency (Hz)'); ylabel('Power(db)'); figure(1); t = (1000/Fs)*[0:length(m) - 1]; plot(t, v); xlabel('ms'); axis([0 t(length(t)) 6.538e4 6.546e4]); title('time domain ntsc signal'); return end end end

50
disp(sprintf('counter = %d, %d element read', counter, last_read_size)); disp(sprintf('%d elements written to %s', c, filename_out)); % close file fclose(fid_read); fclose(fid_write); return_value = 1; return function [y, slope, b] = normalize_data(in) % map from max/min to -1 1 x1 = min(in); y1 = -1; x2 = max(in); y2 = 1; slope = (y1-y2)/(x1-x2); b = y1 - slope*x1; y = slope*in + b; return function [x] = amplitude_demodulate(y) x = abs(y); return % AKA Quadrature Detector function [x] = fm_demodulate(y) siz = length(y); lastVal = y(1); i = 0; while( siz > 0) i = i+1; siz = siz-1; val = y(i); product = val * conj(lastVal); lastVal = val; x(i) = angle(product); end return File: process_ntsc.m function process_ntsc(a) fid = fopen('ntsc_output.data', 'r'); if fid < 1 disp('couldnt open ntsc_output.data'); return; else disp('opened ntsc_output.data'); end
51
% fid_out = fopen('ntsc_output.da2', 'w'); % if fid < 1 % disp('couldnt open ntsc_output.da2'); % return; % else % disp('opened ntsc_output.da2'); % end Fs = 20e6; cnt = 1; mcnt = 1; while( cnt > 0) [y cnt] = fread(fid, 200000, 'double'); m = max(y); y = y/m; % i = find(y>0.85); % y(i) = 1; % i = find(y<0.070); % y(i) = 0; g = conv([ones(1,1000)], y); g = conv([ones(1,1000)], g); clear i; figure(1); t = (1000/Fs)*[0:length(y)-1]; %subplot(2,1, 1), plot(t,y); axis([0 0.4 0 1]); xlabel('ms'); title('time domain ntsc signal'); % subplot(2,1,2), plot(g); % % axis([0 t(length(t)) 0 1]); % xlabel('ms'); % Detect VBI, HBI v = find( y == 1); z = diff(v); i = find(z > 1100 & z < 1400); c = zeros(length(v), 1); c(i) = 1; b = [ones(1,100)]; d = conv(b,c); d = conv(b,d); j = find(d>0); d(j) = 1; d = diff(d(100:length(d))); j = find(d==1);

52
[mcnt] = get_syncs(y, v(i), v(j), mcnt); end fclose(fid); return; function [mcnt] = get_syncs(y, hsyncs_index, vsyncs_index, mcnt) for j = 1:length(vsyncs_index)-1, b = find( hsyncs_index > vsyncs_index(j)); b = min(b); cnt = 0; m = 0; r = cell(2,1); while( hsyncs_index(b) < vsyncs_index(j+1) ) aline = y( hsyncs_index(b):hsyncs_index(b+1)); if( length(aline) > m) m = length(aline); end b = b+1; cnt = cnt + 1; r{cnt} = aline; end save(sprintf('rframe%03d', mcnt), 'r'); disp(sprintf('wrote rframe%03d', mcnt)); mcnt = mcnt + 1; % g = get_picture(r); end return; function [g] = get_picture(r) % r = r(1:(length(r)-1)) % % % frame1 = cell(525,1); % % cnt = 0; % for i=1:length(r) % cnt = cnt + 1; % % if( length( r{cnt} ) < 1400) % frame1{cnt} = r{cnt}; % else % for j=0:ceil((length(r{cnt})/1250)-1)

53
% frame1{cnt} = r{j*1250+1:1250 + j*1250}; % % end % end % % end return File: process_ntsc_lines.m function [frame_out] = process_ntsc_lines (frame_in, std_size) % map from 1:1270 to 1:525 x1 = 1; x2 = 1270; y1 = 1; y2 = 525; m = (y1-y2)/(x1-x2); b = y1 - m*x1; for x=1:std_size; y = slope_intercept(m,b,x); frame_out(:,y) = frame_in(:,x); end return function [y] = slope_intercept(m,b,x) y = round(m*x + b); return File: process_frames.m function process_frames(a) clear all; close all; clc; Fs = 20e6; std_size = 63.5e-6*Fs; frame1 = []; last_frame = []; mov = avifile('my_rframes.avi'); mov.quality = 100; mov.fps = 10; mov.compression = 'Indeo5'; FALSE = 0;

54
TRUE = 1; first = TRUE; for frame_num = 1:103, load(sprintf('rframe%03d', frame_num)); disp(sprintf('reading rframe%03d', frame_num)); rf_len = length(r); frame1 = []; linecnt = 0; framecnt = 0; newline = 0; while linecnt < rf_len, linecnt = linecnt + 1; aline = r{linecnt}; len_aline = length(aline); for i=0:(round( length(aline)/std_size)-1), framecnt = framecnt + 1; frame1(framecnt, :) = ones(1,std_size); len_left = length( aline(i*std_size+1:len_aline)); if( len_left >= std_size) newline = aline(i*std_size+1:(i+1)*std_size); frame1(framecnt, :) = newline'; else newline = aline(i*std_size+1:len_aline); frame1(framecnt, 1:len_left) = newline'; end end end if( ~isempty(last_frame)) frame_out = merge_frames(last_frame, frame1, std_size); frame_out = process_ntsc_lines(frame_out, std_size); if( first == TRUE ) [row,col] = size(frame_out); row = row - 20; col = col - 20; first = FALSE; end h = figure(1);imshow(frame_out(1:row,1:col)); title(sprintf('frame %03d', frame_num));
55
F = getframe(gca); mov = addframe(mov,F); end last_frame = frame1; end mov = close(mov); File: merge_frames.m function [frame_out] = merge_frames(frame1, frame2, std_size) [len1,c] = size(frame1); [len2,c] = size(frame2); lmax = max([len1 len2]); frame_out = ones(lmax*2, std_size); jcnt = 0; for i=1:lmax, if( i <= len1 ) frame_out(i*2-1,:) = frame1(i,:); end if( i <= len2 ) frame_out(i*2 ,:) = frame2(i,:); end end return File: ReadFM95_5.m function ReadFM95() clear all; close all; clc; % % disp('before file naming'); % pause; %%%%%%%%%%%%%%%%%%%%%%%% % open file for reading %%%%%%%%%%%%%%%%%%%%%%%% filename_read = 'fm95_5.dat'; filename_write1 = '7_15.dat'; freq1 = 7.15e6; filename_write2 = '5_75.dat'; freq2 = 5.75e6; filename_write3 = '2_95.dat'; freq3 = 2.95e6; % disp('before file processing'); % pause;

56
sampling_frequency = 20e6; filename_out = filename_write1; freq = freq1; val = 1; r = process_file(filename_read, filename_out, freq, sampling_frequency); disp(sprintf('%s = %d', filename_out, r)); % ConvertToWave(filename_out, val); % % filename_out = filename_write2; % freq = freq2; % val = 2; % r = process_file(filename_read, filename_out, freq, sampling_frequency); % disp(sprintf('%s = %d', filename_out, r)); % ConvertToWave(filename_out, val); % % filename_out = filename_write3; % freq = freq3; % val = 3 % r = process_file(filename_read, filename_out, freq, sampling_frequency); % disp(sprintf('%s = %d', filename_out, r)); % ConvertToWave(filename_out, val); File: Readntsc.m function DoNTSC(y) filename_read = 'ntsc.dat'; filename_write1 = 'ntsc_output.data'; freq1 = 4e6; filename_write2 = 'b.dat'; freq2 = 8.57e6; filename_write3 = 'd.dat'; freq3 = 4.75e6; global van; van = 1; sampling_frequency = 20e6; r = process_file(filename_read, filename_write1, freq1, sampling_frequency); disp(sprintf('%s = %d', filename_write1, r)); % r = process_file(filename_read, filename_write2, freq2, sampling_frequency);; % disp(sprintf('%s = %d', filename_write2, r)); % % % r = process_file(filename_read, filename_write3, freq3, sampling_frequency); % disp(sprintf('%s = %d', filename_write3, r)); File: sine_wave_test.m close all; clear all; clc; fs = 44.1e3; % fs = 44.1Khz
57
t_total = 2; % number of seconds of data n_samples = fs*t_total; % number of samples % Generated frequencies f1 = 5000; % Frequency generated f2 = 0; step_size = 1/fs; t = 0:step_size:t_total-step_size; % time of the samples y1 = sin(2*pi*f1*t); % generate wave y2 = sin(2*pi*f2*t); y = y1 + y2; s = 1024; m = s/2; c = (1/s)*[0:s-1]*(fs/1000); Y = ( abs( fft(y,s) )); plot(c(1:m),Y(1:m)); ylabel('Magnitude'); xlabel('Frequency (kHz)'); wavplay(y,fs);

58
59
Appendix D: Special Resources http://www.gnu.org/software/gnuradio/gnuradio.html www.ti.com www.rfmicro.com
60
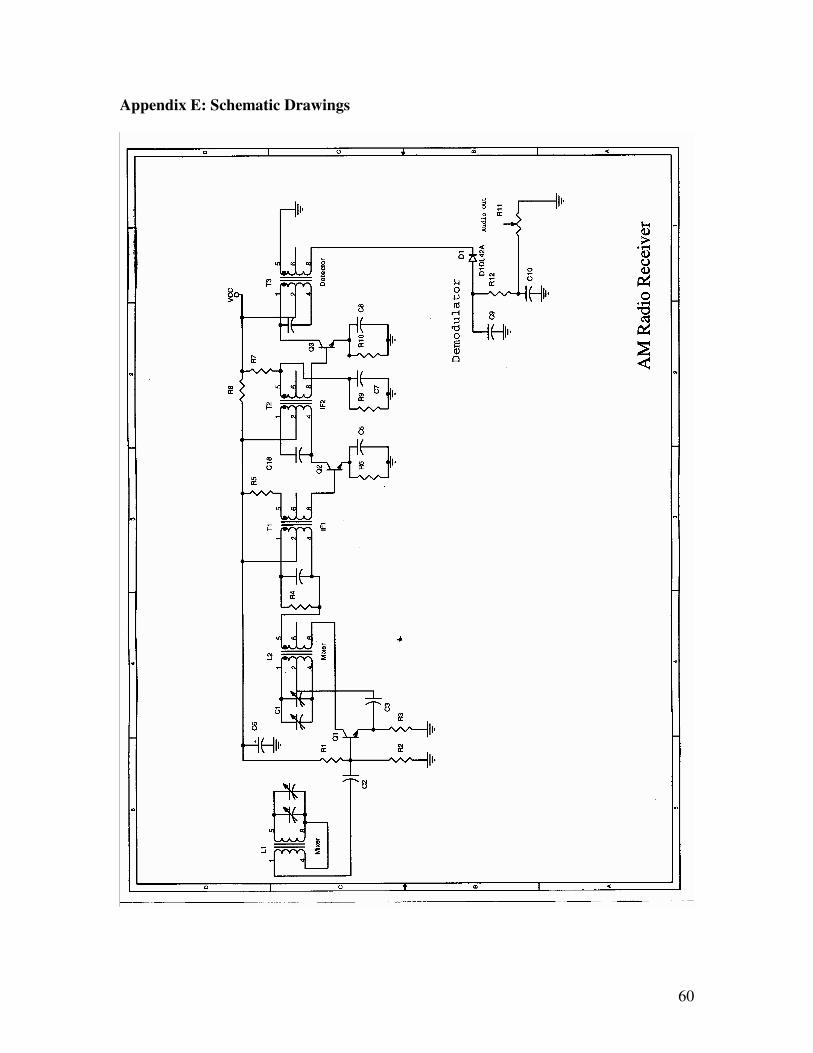
Appendix E: Schematic Drawings

61

62

63

64
Appendix F: Pictures of Receiver and Quadrature Demodulator
Audio Amplfier
Quadrature Demodulator

65
FM Front End:





























