Embed Size (px)
Citation preview
Robotic Cameras and Sensor Networks for High Resolution Environment Monitoring
Ken Goldberg and Dezhen Song
Alpha Lab, IEOR and EECS
University of California, Berkeley

NetworkedRobots

internettele-robot:

RoboMotes: Gaurav S. Sukhatme, USC

Smart Dust: Kris Pister, UCB (Image: Kenn Brown)

NetworkedCameras

Security Applications
Banks, Airports, Freeways, Sports Events, Concerts, Hospitals, Schools, Warehouses, Stores, Playgrounds, Casinos, Prisons, etc.

Conventional Security Cameras • Immobile or Repetitive Sweep• Low resolution

New Video Cameras:Omnidirectional vs. Robotic
• Fixed lens with mirror• 6M Pixel CCD• $ 20.0 K• 1M Pixel / Steradian
• Pan, Tilt, Zoom (21x)• 0.37M Pixel CCD• $ 1.2 K• 500M Pixel / Steradian

Where to look?

Sensornet detects activity
• “Motecams”
• Other sensors:audio, pressure switches,
light beams, IR, etc
• Generate bounding boxes
and motion vectors
• Transmit to PZT camera
Activity localization
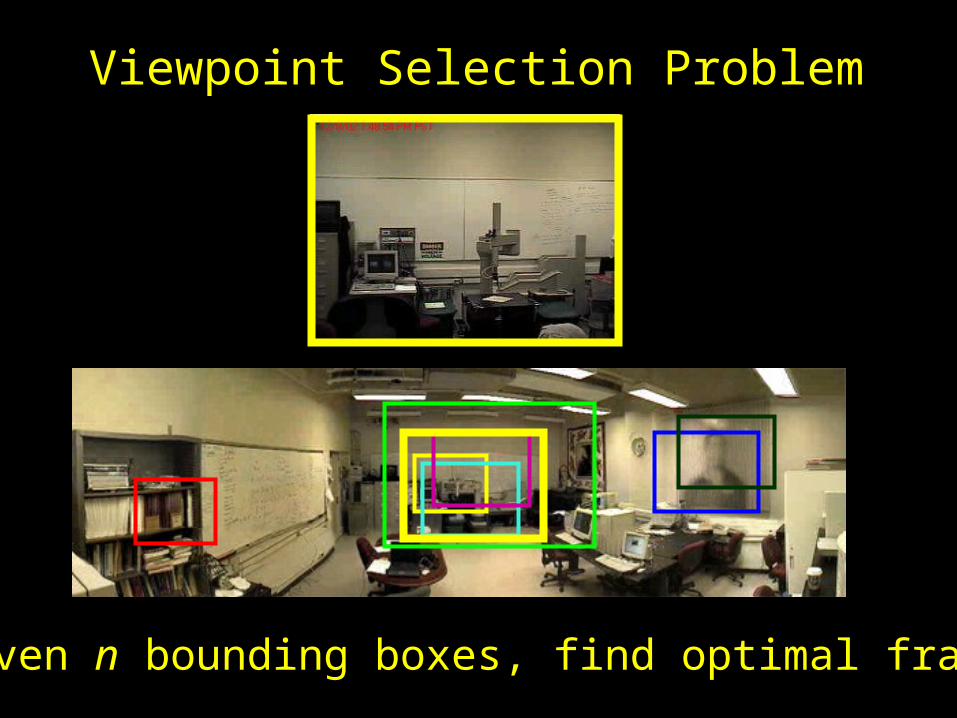
Viewpoint Selection Problem
Given n bounding boxes, find optimal frame

Related Work• Facilities Location
– Megiddo and Supowit [84]– Eppstein [97]– Halperin et al. [02]
• Rectangle Fitting – Grossi and Italiano [99,00]– Agarwal and Erickson [99]– Mount et al [96]
• Similarity Measures – Kavraki [98]– Broder et al [98, 00]– Veltkamp and Hagedoorn [00]

Problem Definition
Requested frames: i=[xi, yi, zi], i=1,…,n

Problem Definition• Assumptions
– Camera has fixed aspect ratio: 4 x 3– Candidate frame = [x, y, z] t
– (x, y) R2 (continuous set)– z Z (discrete set)
(x, y)3z
4z

Problem Definition• “Satisfaction” for user i: 0 Si 1
Si = 0 Si = 1
= i = i

• Symmetric Difference
• Intersection-Over-Union
SDArea
AreaIOU
i
i
1)(
)(
)(
)()(
i
ii
Area
AreaAreaSD
Similarity Metrics
Nonlinear functions of (x,y)

• Intersection over Maximum:
),(
)(
),max(
)1,)/min(()/(),(
i
i
i
i
biiii
Max
Area
aa
p
zzaps
Requested frame i , Area= ai
Candidate frame
Area = a
Satisfaction Metrics
pi

Intersection over Maximum: si( ,i)
si = 0.20 0.21 0.53
Requested frame i
Candidate frame

),(),( yxpyxs iii
),( yxpi
Requested frame i
Candidate frame (x,y)
)1,)/min(()/(),( biiii zzaps
(for fixed z)

Satisfaction Function
– si(x,y) is a plateau
• One top plane• Four side planes• Quadratic surfaces at corners• Critical boundaries: 4 horizontal, 4 vertical
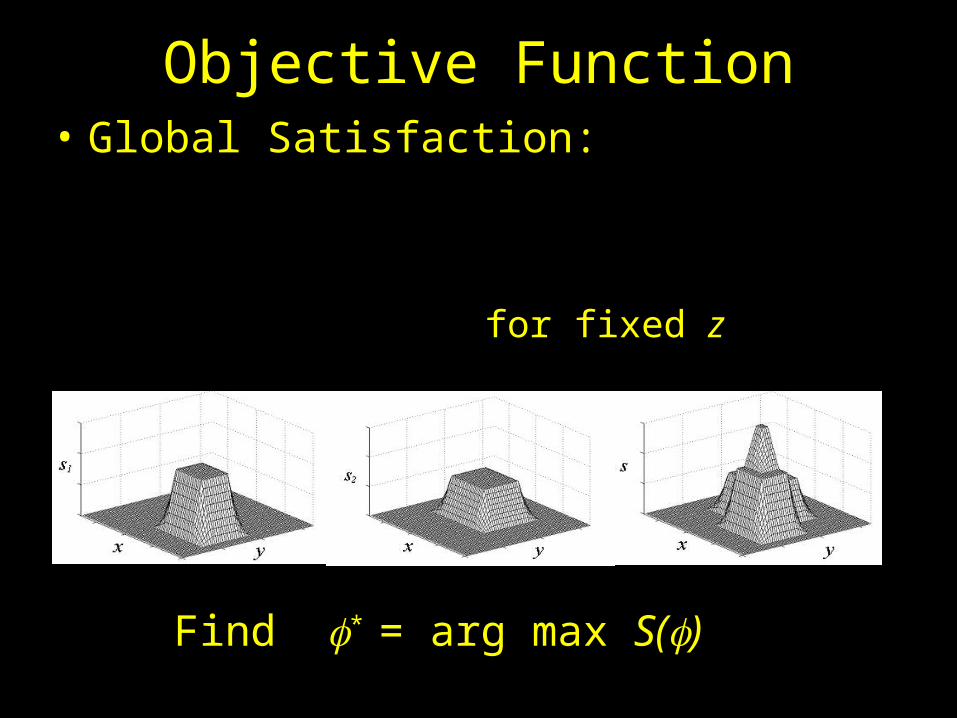
Objective Function• Global Satisfaction:
n
iii
n
i
biii
yxpyxS
zzapS
1
1
),(),(
)1,)/min(()/()(
for fixed z
Find * = arg max S()

S(x,y) is non-differentiable, non-convex, butpiecewise linear along axis-parallel lines.
Properties of Global Satisfaction

Approximation Algorithm
spacing zoom :
spacing lattice :
zd
dx
y
d
Compute S(x,y) at lattice of sample points:

Approximation Algorithm
– Run Time: – O(w h m n / d2)
* : Optimal frame
: Optimal at lattice ~
: Smallest frame at lattice that encloses *
)ˆ()~
()( * sss
)(
)ˆ(
)(
)~
(1
**
s
s
s
s
ddz
z
z
min
min...
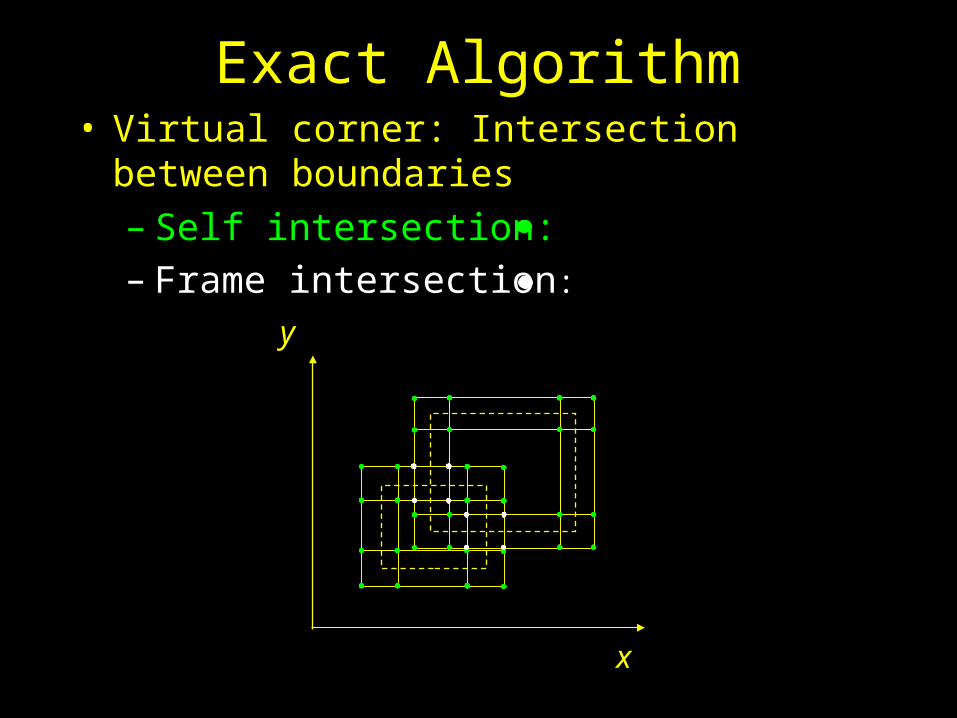
Exact Algorithm• Virtual corner: Intersection between boundaries
– Self intersection:– Frame intersection:
y
x
Exact Algorithm
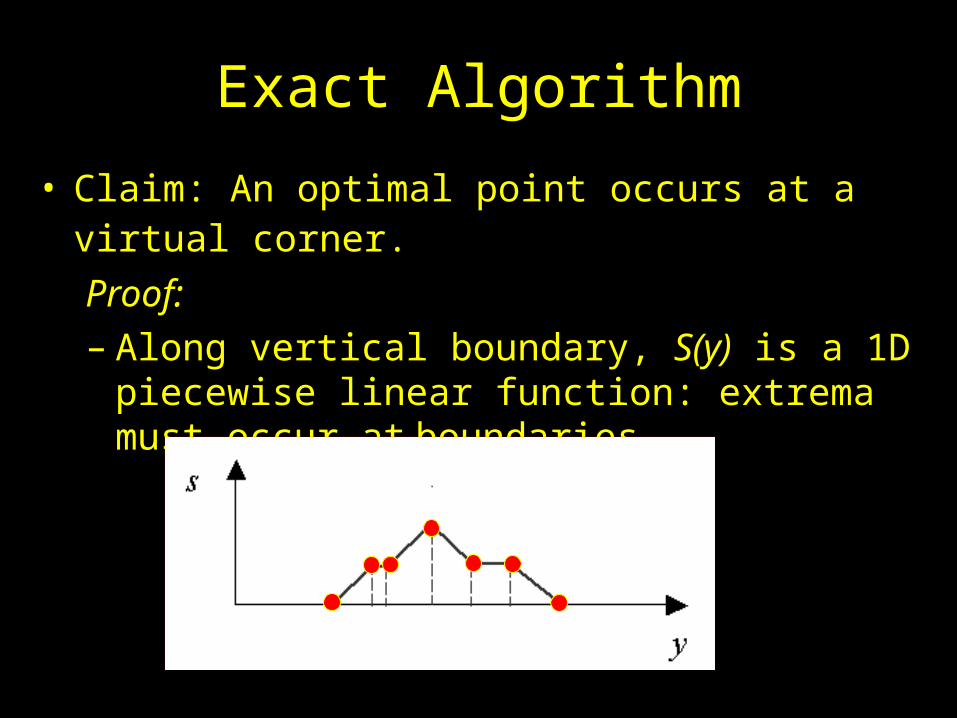
• Claim: An optimal point occurs at a virtual corner. Proof:– Along vertical boundary, S(y) is a 1D piecewise
linear function: extrema must occur at boundaries

Exact Algorithm
Exact Algorithm:
Check all virtual corners(mn2) virtual corners(n) time to evaluate S for each (mn3) total runtime

Improved Exact Algorithm
• Sweep horizontally: solve at each vertical – Sort critical points along y axis: O(n log n)– 1D problem at each vertical boundary O(nm) – O(n) 1D problems– O(n2m) total runtime
O(n) 1D problems

Examples

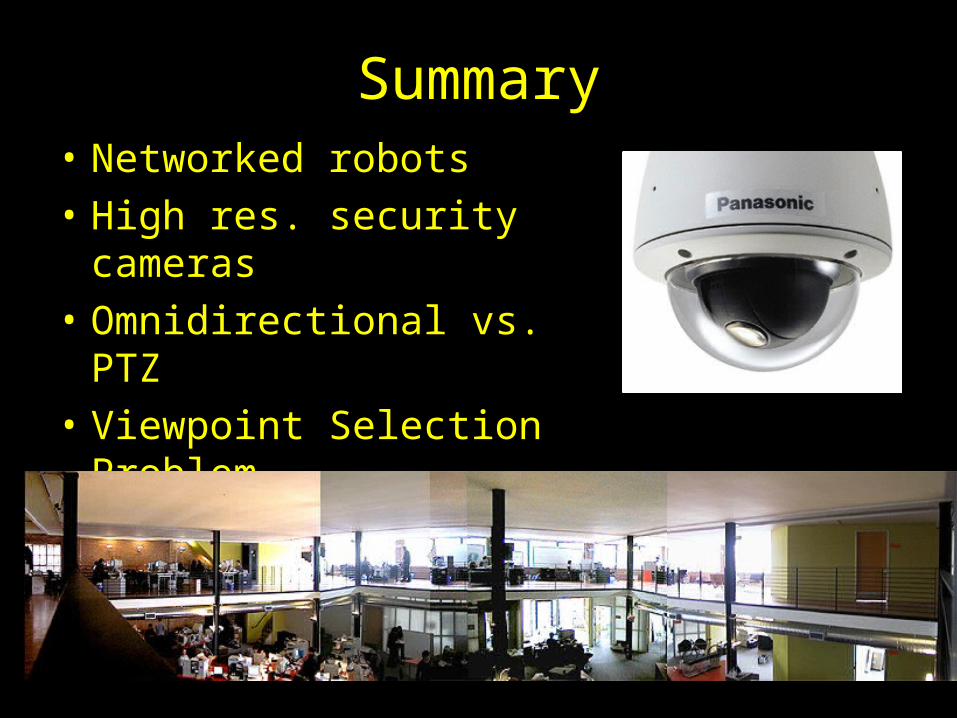
Summary• Networked robots
• High res. security cameras
• Omnidirectional vs. PTZ
• Viewpoint Selection Problem
• O(n2m) algorithm
Future Work
• Continuous zoom (m=)• Multiple outputs:
– p cameras – p views from one camera
• “Temporal” version: fairness– Integrate si over time: minimize accumulated
dissatisfaction for any user
• Network / Client Variability: load balancing• Obstacle Avoidance


Related Work• Facility Location Problems
– Megiddo and Supowit [84]– Eppstein [97]– Halperin et al. [02]
• Rectangle Fitting, Range Search, Range Sum, and Dominance Sum– Friesen and Chan [93] – Kapelio et al [95]– Mount et al [96]– Grossi and Italiano [99,00]– Agarwal and Erickson [99]– Zhang [02]

Related Work
• Similarity Measures – Kavraki [98]– Broder et al [98, 00]– Veltkamp and Hagedoorn [00]
• Frame selection algorithms – Song, Goldberg et al [02, 03, 04], – Har-peled et al. [03]

Problem Definition• Assumptions
– Camera has fixed aspect ratio: 4 x 3– Candidate frame c = [x, y, z] t
– (x, y) R2 (continuous set)– Resolution z Z
• Z = 10 means a pixel in the image = 10×10m2 area • Bigger z = larger frame = lower resolution
(x, y)3z
4z

Problem Definition
Requests: ri=[xli, yt
i, xri, yb
i, zi], i=1,…,n
(xli, yt
i) (xri, yb
i)
Optimization Problem
n
iii
zyxcrcsS
1],,[
),(max
User i’s satisfaction
Total satisfaction

Problem Definition• “Satisfaction” for user i: 0 Si 1
Si = 0 Si = 1
= c ri c = ri
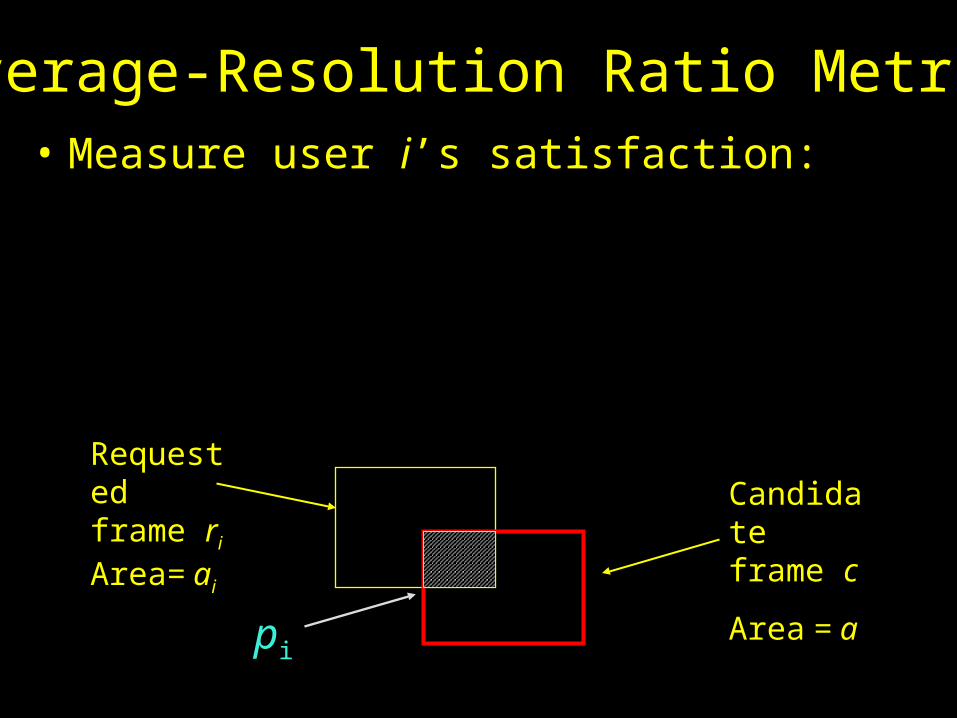
• Measure user i’s satisfaction:
)1),/min(()/(
1,)(
)(min
)(
)(),(
zzap
cResolution
rResolution
rArea
rcAreacrs
iii
i
i
ii
Coverage-Resolution Ratio Metrics
Requested frame ri
Area= ai
Candidate frame c
Area = a
pi

Comparison with Similarity Metrics
• Symmetric Difference
• Intersection-Over-Union
SDcrArea
crAreaIOU
i
i
1)(
)(
)(
)()(
crArea
crAreacrAreaSD
i
ii
Nonlinear functions of (x,y), Does not measure resolution difference
Optimization Problem
n
iii
zyxcrcs
1],,[
),(max

),(),( yxpyxs iii
),( yxpi
Requested Frame ri Candidate
Frame c
)1,/min()/(),( zzapcrs iiii
(for fixed z)
Objective Function Properties
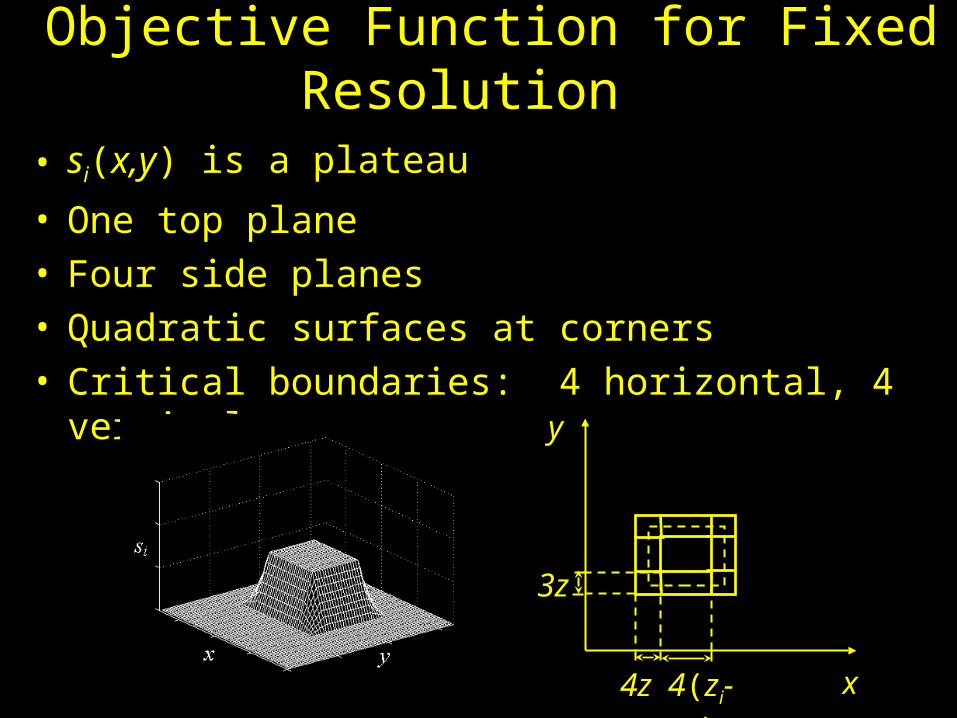
• si(x,y) is a plateau
• One top plane• Four side planes• Quadratic surfaces at corners• Critical boundaries: 4 horizontal, 4 vertical
Objective Function for Fixed Resolution
4z x
y
3z
4(zi-z)

Objective Function• Total satisfaction:
n
iii
n
iiii
yxpyxS
zzapcS
1
1
),(),(
)1),/min(()/()(
for fixed z
Frame selection problem: Find c* = arg max S(c)
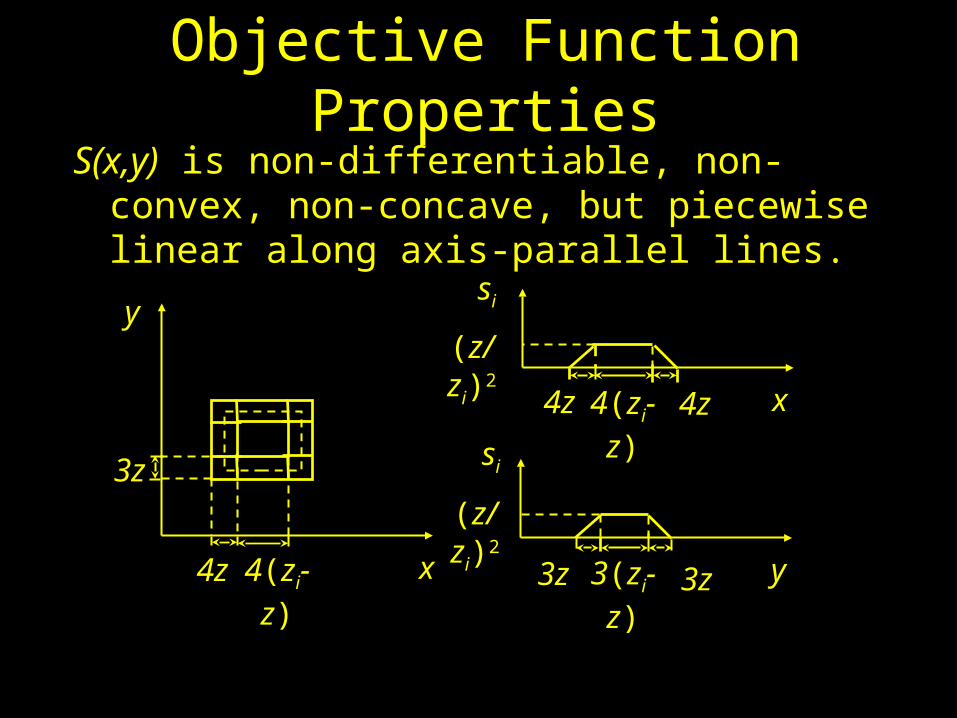
S(x,y) is non-differentiable, non-convex, non-concave, but piecewise linear along axis-parallel lines.
Objective Function Properties
4z x
y
3z
4(zi-z)
3z y
si
3z
(z/zi)2
3(zi-z)
x
si
4z 4z
(z/zi)2
4(zi-z)
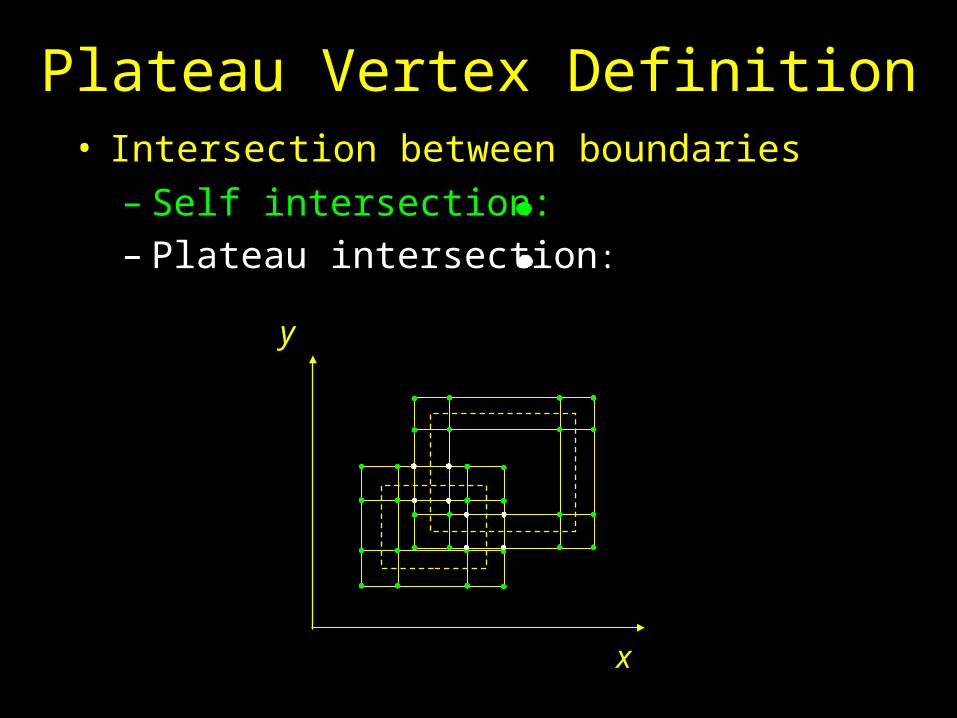
Plateau Vertex Definition• Intersection between boundaries
– Self intersection:– Plateau intersection:
y
x

Plateau Vertex Optimality Condition
• Claim 1: An optimal point occurs at a plateau vertex in the objective space for a fixed Resolution. Proof:– Along vertical boundary, S(y) is a 1D piecewise
linear function: extrema must occur at x boundaries
y
S(y)
Fixed Resolution Exact Algorithm
Brute force Exact Algorithm:
Check all plateau vertices (n2) plateau vertices(n) time to evaluate S for each (n3) total runtime

Improved Fixed Resolution Algorithm
• Sweep horizontally: solve at each vertical – Sort critical points along y axis: O(n log n)– 1D problem at each vertical boundary O(n) – O(n) 1D problems– O(n2m) total runtime
for m zoom levels
O(n) 1D problems
y
S(y)
x
y
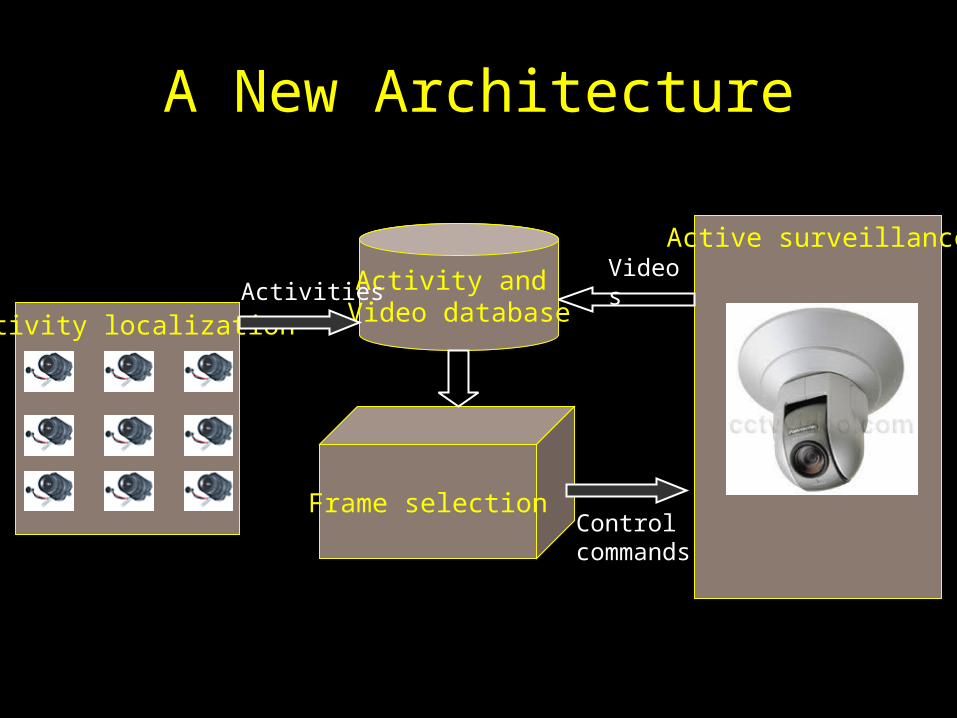
A New Architecture
Activity and Video databaseActivity localization
Activities
Frame selection
Active surveillance
Control commands
Videos

Software diagram
TCP/IP
TCP/IP
Activity & video database
Core (with shared memory segments)
RPC module
RPC module
RPC module
Communication
Console/Log
Activity server
Activity generation
Motescam
Wireless Camera control
Calibration
Panoramic image generation
Video server
Panasonic HCM 280 Camera
Visual C++
NesC + Tiny OS
Gnu C++MySQL

Database: indexing video data
• Activity Index– Timestamp
– Speed (Or other sensor data)
– Range
• Query video data using activity – Show video clips of moving objects with speed faster than
1 meter per second in zone 1 in last 10 days
– Show video clips of zone 1 when CO2 concentration exceeded the threshold in Jan. 2004 (Assuming CO2 sensor is used in detecting activity)
Activity and Video database

Camera control





























