Embed Size (px)
Citation preview

Research ArticleThe Particle Filter Sample Impoverishment Problem inthe Orbit Determination Application
Paula Cristiane Pinto Mesquita Pardal1 Helio Koiti Kuga2 andRodolpho Vilhena de Moraes3
1University of Sao Paulo (USP)-EELLOB Estrada Municipal do Campinho sn 12602-810 Lorena SP Brazil2National Institute for Space Research (INPE)-DMC Avenida dos Astronautas1758 Jardim da Granja 12227-010 Sao Jose dos Campos SP Brazil3Sao Paulo Federal University (UNIFESP)-ICTUNIFESP Rua Talim 330 Vila Nair 12231-280 Sao Jose dos Campos SP Brazil
Correspondence should be addressed to Paula Cristiane Pinto Mesquita Pardal paulapardaluspbr
Received 11 February 2015 Accepted 6 May 2015
Academic Editor Ruihua Liu
Copyright copy 2015 Paula Cristiane Pinto Mesquita Pardal et al This is an open access article distributed under the CreativeCommons Attribution License which permits unrestricted use distribution and reproduction in any medium provided theoriginal work is properly cited
The paper aims at discussing techniques for administering one implementation issue that often arises in the application of particlefilters sample impoverishment Dealing with such problem can significantly improve the performance of particle filters and canmake the difference between success and failure Sample impoverishment occurs because of the reduction in the number of trulydistinct sample values A simple solution can be to increase the number of particles which can quickly lead to unreasonablecomputational demands which only delays the inevitable sample impoverishment There are more intelligent ways of dealing withthis problem such as roughening and prior editing procedures to be discussed herein The nonlinear particle filter is based on thebootstrap filter for implementing recursive Bayesian filtersThe application consists of determining the orbit of an artificial satelliteusing real data from theGPS receiversThe standard differential equations describing the orbitalmotion and theGPSmeasurementsequations are adapted for the nonlinear particle filter so that the bootstrap algorithm is also used for estimating the orbital stateThe evaluation will be done through convergence speed and computational implementation complexity comparing the bootstrapalgorithm results obtained for each technique that deals with sample impoverishment
1 Introduction
The orbit of an artificial satellite is determined using real datafrom the Global Positioning System (GPS) receivers In theorbit determination process of artificial satellites the natureof the dynamic system and the measurements equations arenonlinear As a result it is necessary tomanage a fully nonlin-ear problem in which the disturbing forces as well as themea-surements are not easilymodelled In this orbit determinationproblem the variables that completely specify a satellitetrajectory in the space are estimated with the processing ofa set of pseudorange measurements related to the body
A spaceborne GPS receiver is a powerful resource todetermine orbits of artificial Earth satellites by providingmany redundantmeasurements which ultimately yields high
degree of the observability to the problemThe Jason satelliteis a nice example of usingGPS for space positioningThroughan on-boardGPS receiver the pseudoranges (error corrupteddistance from satellite to each of the tracked GPS satellites)can be measured and used to estimate the full orbital state
The bootstrap filter is a particle filter whose central ideais to express the required probability density function (PDF)as a set of random samples instead of a function over statespace [1ndash3]
Numerous strategies have been developed for solving theparticles degeneracy (or sample impoverishment) problemthat often arises in particle filter applications like introductionof a risk-sensitive particle filter as an alternative approachto mitigate sample impoverishment based on constructingexplicit risk functions from a general class of factorizable
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 168045 9 pageshttpdxdoiorg1011552015168045
2 Mathematical Problems in Engineering
functions [4] incorporation of genetic algorithms into aparticle filter [5 6] and many others [7ndash9] All these strate-gies although extremely interesting and suitable for the orbitdetermination problem are not in the scope of this workHere the option was done for studying two classical methodsto solve (or try to solve) the degeneracy problem rougheningand prior editing
Herein the main goal is to analyze the bootstrap fil-ter behavior for the highly nonlinear orbit determinationproblem Its simulation results are compared taking intoaccount the sample impoverishment A reference solution is abootstrap particle filter (BPF) applied to orbit determinationthat has already been compared to the unscented Kalmanfilter solution for the same problem and works well for theanalysis of the sample impoverishment issue [10]
2 Particle Filter
The particle filter was designed to numerically implementthe Bayesian estimator [2]The Bayesian approach consists ofconstructing the PDF of the state based on all the availableinformation and for nonlinear or non-Gaussian problemthe required PDF has no closed form The bootstrap filterrepresents the required PDF as a set of random sampleswhich works as an alternative to the function over state spaceThis filter is a recursive algorithm for propagation and updateof these samples for the discrete time problem The Bayesrule the key update stage of the method is implemented as aweighted bootstrap [1]
The main idea of the BPF is intuitive and direct At thebeginning 119873 particles 119909
+
0119894(119894 = 1 119873) are randomly
generated based on the known initial PDF 119901(1199090) At each
step of time 119896 the particles are propagated to the nextstep using the dynamics equation [2] After receiving themeasurement at time 119896 the PDF 119901(119910
119896| 119909119894
119896minus1) is evaluated
That is the conditional relative likelihood of each particle 119909minus119896119894
is calculated If an 119898-dimensional measurement equation isgiven as 119910
119896= ℎ (119909
119896)+V119896and V119896is a Gaussian random variable
with a mean of zero and a variance of 119877 V119896sim 119873(0 119877) then
a relative likelihood 119902119894that the measurement is equal to a
specific measurement 119910lowast given the premise that 119909119896is equal
to the particle 119909119894119896minus1
can be computed as follows [2]
119902119894= 119901 (119910
119896= 119910lowast
| 119909119896= 119909119894
119896minus1) = 119901 lfloorV
119896= 119910lowast
minus ℎ (119909119894
119896minus1)rfloor
sim1
(2120587)1198982
|119877|12
sdot exp(minus[119910lowastminus ℎ (119909
119894
119896minus1)]
T119877minus1[119910lowastminus ℎ (119909
119894
119896minus1)]
2)
(1)
In (1) the symbol simmeans that the probability is directlyproportional to the right side So if the equation is used forall particles 119909
minus
119896119894 then the relative likelihood that the state
is equal to each particle is correct The relative likelihoodvalues are normalized to ensure that the sum of all likelihoodvalues is equal to one Next a new set of randomly generatedparticles 119909
+
119896119894is computed from the relative likelihood 119902
119894
In the resampling step roughening was used in order toprevent sample impoverishment At this point there is a setof particles 119909
+
119896119894that are distributed according to the PDF
119901(119909119896| 119910119896) and any desired statistical measure of it can be
computed [2]The particle filter adjusted to the orbit determination
problem can be summarized as follows
(1) The dynamic and the measurement equations aregiven as
x119896+1
= f119896(x119896) + w119896
y119896= h119896(x119896) + ^119896
(2)
where w119896and ^
119896are independent white noise pro-
cesses with known PDFs(2)119873 initial particles x+
0119894(119894 = 1 119873) are randomly
generated on the basis of the known initial state PDF119901(x0)119873 is a parameter chosen as a trade-off between
computational cost and estimation accuracy [2](3) For 119896 = 1 2
(a) in the time propagation step obtain a priori(predicted) particles xminus
119896119894 using the dynamics
equation and the PDF of the process noise bothknown
xminus119896119894
= f119896minus1
(x+119896minus1119894
) + w119894119896minus1
119894 = 1 119873 (3)
where each noise vector w119894119896minus1
is randomlygenerated on the basis of the known PDF ofw119896minus1
(b) compute the relative likelihood 119902
119894of each
particle 119909minus
119896119894 conditioned on the measurement
y119896 using the nonlinear measurement equation
and the PDF of themeasurement noise as in (1)(c) normalize the relative likelihood values
119902119894=
119902119894
sum119873
119895=1119902119895
(4)
(d) in the resampling step generate a set of aposteriori (resampled) particles x+
119896119894 on the basis
of the relative likelihood 119902119894
(e) now there is a set of particles x+119896119894distributed
according to the PDF 119901(x119896
| y119896) and mean
and covariance statistical measures can be com-puted
In the implementation of the bootstrap filter there is onlya small overlap between the prior and the likelihood
There are some procedures that may be implementedfor combating the consequent reduction in the number oftruly distinct sample values such as increasing the number ofparticles roughening and prior editing [1] Here they wereimplemented a bootstrap particle filter with resampling (PF)a PF with roughening (PFR) and a PFR with prior editing(PFPE) in order to evaluate roughening and prior editingstrategies for dealing with sample impoverishment
Mathematical Problems in Engineering 3
21 Roughening Roughening will be the first remedy forsample impoverishment to be discussed It restrains theresampled particles spread (a posteriori particles) by addingrandom noise to them which is similar to adding artifi-cial process noise to the Kalman filter [2] In rougheningapproach the a posteriori particles are modified after theresampling step as follows
x+119896119894(119898) = x+
119896119894(119898) + Δx (119898) 119898 = 1 119899
Δx (119898) sim (0 119870M (119898)119873minus1119899
)
(5)
Δx(119898) is a zero-mean random variable (usually Gaussian)119870is a constant tuning parameter119873 is the number of particles119899 is the state space dimension and M is a vector of themaximum difference between the particle elements beforeroughening The119898th element of theM vector is given as
M (119898) = max119894119895
10038161003816100381610038161003816x+119896119894(119898) minus x+
119896119895(119898)
10038161003816100381610038161003816 119898 = 1 119899 (6)
where 119896 is the step time and 119894 and 119895 are particle numbersThe tuning parameter 119870 choice is a compromise Being
too large a value would blur the distribution but being toosmall it would produce tight clusters of points around theoriginal particles [1] In this paper119870 = 01
22 Prior Editing Prior editing can be tried if rougheningdoes not prevent sample impoverishment Such approachedits the a posteriori particles from the prior time instantx+119896minus1119894
(after roughening) if the a priori particle from actualinstant xminus
119896119894 does not satisfy a coarse pragmatic acceptance
test [1] Therefore this procedure artificially boosts thenumber of samples of the prior editing in the neighborhoodof the likelihood for if an a priori particle is in a region ofstate space with small 119902
119894 it is rejected Then the a priori
rejected particle can be roughened asmany times as requiredaccording to (5) until it is in a region of significant 119902
119894[2]The
prior editing was implemented as follows [1]
(a) Pass the resampled sample from previous instantx+119896minus1
through roughening and system model to gen-erate the predicted sample from current instant xminus
119896
(b) Calculate 120592119896119894
= 119911119896minus h(xminus
119896119894) the residual between
the true and the predicted measurements for the 119894thparticle of the sample considering that the actualinstant observation is available
(c) If the magnitude of 120592119896119894
is higher than six standarddeviations of the measurement noise then it is highlyunlikely that xminus
119896119894is chosen as an a posteriori particle
In this case xminus119896119894
is rejected and x+119896minus1119894
is roughenedagain and passes one more time through dynamicmodel to generate a new a priori particle xminus
119896119894 As x+119896minus1119894
has already passed through roughening and generateda rejected predicted particle this procedure may berepeated while xminus
119896119894is in a region of no negligible
probability
Due to the high computational cost involving priorediting such approach was done only once It is importantto make it clear that here the 119894th particle is in fact an 119899-dimensional vector while a sample is a 119899 times 119873 matrix wherethe 119899th state variable is represented by119873 particles
The accommodation of roughening and prior editing inthe bootstrap particle filter algorithm can be schematized asFigure 1 shows
3 Orbit Determination
The orbit determination is a process for obtaining valuesof the parameters that completely specify the motion of anorbiting body (as an artificial satellite) based on a set ofobservations of the body It involves nonlinear dynamicaland nonlinear measurement systems which depends onthe tracking system and the estimation technique [11 12]The dynamical system model consists of describing satelliteorbital motion which includes Earthrsquos rotation effects andperturbationmodels andmeasurements modelsThese mod-els depend on the state variables initial conditions as well as avariety of parameters which affect both the dynamic motionsas themeasurement process [13] Due to the complexity of theappliedmodels usually it is not possible to solve suchmodelsequations directly for any of these parameters from a givenset of observations
The observationmay be obtained from the ground stationnetworks using laser radar Doppler or space navigationsystems as the GPS The choice of the tracking systemdepends on a compromise between the goals of the missionand the available tools In the case of the GPS the advantagesare global coverage high precision low cost and autonomousnavigation resources The GPS may provide orbit deter-mination with accuracy at least as good as the methodsusing ground tracking networksThe latter provides standardprecision around tens of meters and the former can provideprecision as tight as some centimetresTheGPS provides at agiven instant a set of many redundant measurements whichmakes the orbit position observable geometrically
After some advances of technology the single frequencyGPS receivers provide a good basis to achieve fair precision atrelatively low cost still attaining the accuracy requirementsof the mission operation The GPS allows the receiver todetermine its position and time geometrically anywhereat any instant with data from at least four satellites Theprinciple of navigation by satellites is based on sending signalsand data from theGPS satellites to a receiver located on boardthe satellite whose orbit needs to be determinedThis receivermeasures the travel time of the signal and then calculates thedistance between the receiver and the GPS satellite Thosemeasurements of distances are called pseudoranges
The instantaneous orbit determination using GPS satel-lites is based on the geometric method In such method theobserver knows the set ofGPS satellites position in a referenceframe obtaining its ownposition in the same reference frame
31 Dynamics Model In the case of orbit determination viaGPS the ordinary differential equations which represent the
4 Mathematical Problems in Engineering
Prediction
Resampling
No
Prior editing
Yes
Maximum difference between
Roughening
Maximum difference between
Roughening
Prediction
Residual
119858k minus 119841(119857minuski)
119857+kminus1i rarr 119857
minuski
119857+kminus1i = kminus1i + Δ119857
the particles vectors rarr Δ119857
k = k minus 1
k = k + 1
ki
rarr Δ119857
119857+ki = ki + Δ119857
|119858k minus (119857+kminus1i)| gt 6120590h
the particles vectors
119857+kminus1i rarr 119857
minuski
Figure 1 Roughening and prior editing accommodation in the BPF algorithm
dynamic model are in its simplest form given traditionallyas follows
r = k
k = minus120583r1199033
+ a + wV
= 119889
119889 = 119908119889
(7)
wherein the variables are placed in the inertial referenceframe In (7) r is the vector of the position components(119909 119910 119911) k is the velocity vector a represents the modelledperturbing accelerations wV is the white noise vector withcovariance Q 119887 is the user satellite GPS clock bias 119889 is theuser satellite GPS clock drift and 119908
119889is the noise associated
with the GPS clock The GPS receiver clock offset was nottaken into account so as not to obscure the conclusionsdrawn in this paper due to introduction of clock offsetmodelsin the filters Indeed the receiver clock offset was beforehand
obtained and used to correct the GPS measurements sothat the measurements are free from the error derived fromreceiver clock offset
32 Forces Model There are gravitational and nongravi-tational forces that affect the orbit of an Earthrsquos artificialsatellite The main disturbing forces of gravitational natureare the nonuniform distribution of Earthrsquos mass ocean andterrestrial tides and the gravitational attraction of the Sunand the Moon And the principal nongravitational effects areEarth atmospheric drag direct and reflected solar radiationpressure electric drag emissivity effects relativistic effectsand meteorites impacts
The disturbing effects are in general included accordingto the physical situation presented and to the accuracy that isintended for the orbit determination Here only a minimumset of perturbations was included which enable analyzing theperformance of the particle filter [14] geopotential [15] directsolar radiation pressure [16 17] and third body point masseffect of the Sun and the Moon [18 19]
Mathematical Problems in Engineering 5
33 Observations Model The nonlinear equation of theobservation model is
y119896= h119896(x119896 119905119896) + ^119896 (8)
where at instant 119905119896 y119896is the vector of119898 observations h
119896(x119896)
is the nonlinear function of state x119896 with dimension 119898
and ^119896is the observation errors vector with dimension 119898
and covariance R119896 For the present application the ion-free
pseudorange measurements from the Jason-2 GPS receiverare used Also the receiver clock offset was computedbefore and used to correct the pseudorange measurementsAdditionally the nonlinear pseudorange measurement wasmodelled according to [20]
4 Results
The tests and the analysis for the bootstrap particle filterand two procedures for avoiding sample impoverishment(roughening and prior editing) are presented To validateand to analyze the methods real GPS data from the Jason-2 satellite are used Ocean Surface Topography Mission(OSTM)Jason-2 is a follow-on altimetry mission to the verysuccessful TOPEXPoseidon mission and Jason-1 It is a jointmission between NASA and CNES (French space agency)launched June 20 2008 Jason-2 has a repeat period ofapproximately 10 days with 254 passes per cycle Its nodalperiod is 674572 sec (near 187 hours) Sometimes there maybe anomalous or missing data Occasionally Jason-2 mustperform maneuvers to maintain orbit When the satellitedetects something abnormal it will go into safe hold and willturn off all instruments and no data will be collected [21]
The filters estimated position and velocity are comparedwith Jason-2 precise orbit ephemeris (POE) from JPLNASAThe test conditions consider real ion-free pseudorange datacollected by the GPS receiver on-board Jason-2 on October22 2010 presenting up to 12 GPS satellites tracked The testswere limited to 55 hours of GPS data spaced 10 s After thatthere was an undesirable data gap which could spoil thetest case Such 55-hour arc (near 3 Jason-2 orbital periods)was considered sufficient for evaluating the bootstrap particlefilter and roughening and prior editing approaches in thisorbit determination application
The force model comprises perturbations due to geopo-tential up to order and degree 50 times 50 direct solar radiationpressure and Sun-Moon gravitational attraction This modelof forces is suitable for implementation in orbit determinationbecause of the low computational cost added comparedto the improvement in the results accuracy [22ndash24] Thepseudorange measurements were corrected to the first orderwith respect to ionosphere
This work is not a search for results accuracy It aimsat analyzing the application of a bootstrap filter to the orbitdetermination problem The analysis is based on comparingthe errors in position (translated to the orbital radial normaland along-track RNT components) among three solutions
(1) The bootstrap particle filter with resampling appliedwithout any sample impoverishment procedure(named ldquoPFrdquo in the results)
(2) The bootstrap particle filter applied with roughening(named ldquoPFRrdquo in the results)
(3) The bootstrap particle filter applied with rougheningand prior editing (named ldquoPFPErdquoin the results)
The RNT system interpretation is straightforward theradial component ldquoRrdquo points to the nadir direction the nor-mal ldquoNrdquo is perpendicular to orbital plane and the transversal(along-track) ldquoTrdquo is orthogonal to ldquoRrdquo and ldquoNrdquo and it isalso the velocity component Thus it is possible to analyzewhat happens with the orbital RNT components and theorbit evolution as well There is also interest for processingtime in order to analyze the computational efforts face to theaccuracy achieved by each algorithm
Regarding time of processing 119905CPU it was expected thatthe time required for the bootstrap particle filter algorithmwas increasing in two scenarios if the number of particlesrises and if roughening and prior editing were added to thealgorithm According to the estimator nature each elementof the state was replaced by an array of 119873 particles where119873 is a trade-off between computational cost and estimationaccuracy Here tests were done for 17 100 300 and 700particles
As said before prior editing recomputes any particle thatdoes not match a specific criterion Therefore a relevanttest is to observe the instant when each algorithm startsrejecting particles which will be presented The goal is toverify whether as a procedure is included it delays therejection process It will also be analyzedwhether the numberof particles affects the particle rejection that is whetherits increase may work as an approach for avoiding sampleimpoverishment
If 119873 is set (so the analysis is per line in Table 1) it isnoticeable that 119905CPU CPU time measured for PF and PFR isvery similar with a maximum 3 of difference However thealgorithm that includes prior editing PFPE is significantlymore costly reaching 39 of increase This was expectedfor PFPE because of the particles that do not pass theacceptance test and need to return to prior instant Regardingthe effects of increasing the number of particle for the samealgorithm (so the analysis is per column in Table 1) the raisein processing time was 83 from 17 to 100 particles 67from 100 to 300 and 59 from 300 to 700 Considering thatfor 17 100 300 and 700 particles the increase in 119873 is 6 3and 23 times respectively then 119905CPU increase is not directlyproportional to the number of particles used Therefore theCPU time and the increase in the number of particles showthat the time of processing is related to the chosen numberof particles only when the number of particles changes but ithas no relation with the estimator implemented
For computing time of processing and for all the simu-lations shown a computer Intel Core i5-2430M processor of240GHz with 270GB of RAM was used The program wascoded in FORTRAN 77 within operating system WindowsXP and compiler Compaq Visual Fortran version 61
When some particles do not reach prior editing criterion(ie the magnitude of 120592
119896119894is higher than six standard
deviation of the measurement noise) they need to be editedin the prior instant of timeThe first instant when any particle
6 Mathematical Problems in Engineering
Table 1 Time of processing
119873 PF PFR PFPE
119905CPU
17 44 s 45 s 1min 23 s100 4min 16 s 4min 19 s 7min 07 s300 12min 49 s 13min 05 s 20min 56 s700 31min 09 s 31min 27 s 50min 31 s
Table 2 Instant of the first rejection of particles occurrence
119873 PF PFR PFPE
119905PE
17 16min 00 s 26min 40 s 26min 40 s100 10min 00 s 45min 50 s 45min 50 s300 9min 20 s 45min 50 s 45min 50 s700 9min 00 s 45min 50 s 45min 50 s
needed to be edited 119905PE was computed for each algorithmand119873 as can be verified in Table 2
In Table 2 the rejection of particles was first detectedin the PF algorithm despite the number of particles usedThis was expected since no procedure in order to combatthe number of truly distinct samples reduction was usedin this algorithm And the instant when the first rejectionoccurred in PFR and PFPE concurred for all changing inthe number of particles This is considerably consistentsince prior editing procedure depends first on rougheningimplementation Regarding the increase in the number ofparticles (from 17 to 100) it is noticeable that when proce-dures for avoiding sample impoverishment are adopted (inPFR and PFPE cases) the instant when the first rejection ofparticles is detected is delayed in 42 Nevertheless for theother cases analyzed (300 and 700 particles) such instantremains the same This suggests that increasing 119873 as anapproach for minimizing the sample impoverishment issueis a little efficient with a very high computational burdenas seen in Table 1 For PF the results were not conclusiveIt seems that the higher the number of particles the fastertheir impoverishment if nothing is done for avoiding sampleimpoverishment
As said before the number of particles is chosen as atrade-off between computational cost and estimation accu-racy The results in Table 3 present mean and standarddeviation of the errors in RNT components evaluated for119873 = 17 100 300 and 700 If only these statistics areanalyzed it is clear that the estimation accuracy improvesas the number of particles increases The largest standarddeviation occurred for PFPE (119873 = 17) In the along-trackcomponent a divergence occurrence in all algorithms (119873 =
17) was detected which can be verified by the high meanand standard deviation values obtained in the three casesSuch divergence disappears when119873 is increased When119873 =
700 the statistics and the errors behavior were very similarin the results obtained by PFR and PFPE versions By theinformation presented it is possible to conclude that if thenumber of particles is very small any sample impoverishmentavoidance procedure will not be effective Even more thePFPE approach as used here (particles edition executed only
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
3200
2800
2400
2000
1600
1200
800
400
0
minus400
PF with prior editing N = 17
Figure 2 Errors in RNT coordinates for PFPE simulation (119873 = 17)
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
60
30
0
minus30
minus60
minus90
minus120
PF with roughening N = 300
Figure 3 Errors in RNT coordinates for PFR simulation (119873 = 300)
once) does not present any significant improvement facingthe PFR procedure no matter the number of particles usedAnd taking into account the higher computational cost foronly one edition of particles if the PFPE is implemented asmany times as necessary the computation burden is enoughto contraindicate this procedure use even if the results areimproved
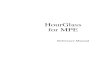
In order to show the behavior of the errors in termsof RNT coordinates Figures 2 3 and 4 are presentedFigure 2 shows the worst result the solution obtained forPFPE algorithm considering 119873 = 17 where the divergencein along-track coordinate is shown Figure 3 shows a PFRsolution for 119873 = 300 while Figure 4 presents the 119873 = 700
solution It was chosen to introduce PFR solutions becausethis is the algorithm with better performance during orbitdetermination process The errors decrease considerably inall implementations for 100 or more particles (see Table 3)
Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
functions [4] incorporation of genetic algorithms into aparticle filter [5 6] and many others [7ndash9] All these strate-gies although extremely interesting and suitable for the orbitdetermination problem are not in the scope of this workHere the option was done for studying two classical methodsto solve (or try to solve) the degeneracy problem rougheningand prior editing
Herein the main goal is to analyze the bootstrap fil-ter behavior for the highly nonlinear orbit determinationproblem Its simulation results are compared taking intoaccount the sample impoverishment A reference solution is abootstrap particle filter (BPF) applied to orbit determinationthat has already been compared to the unscented Kalmanfilter solution for the same problem and works well for theanalysis of the sample impoverishment issue [10]
2 Particle Filter
The particle filter was designed to numerically implementthe Bayesian estimator [2]The Bayesian approach consists ofconstructing the PDF of the state based on all the availableinformation and for nonlinear or non-Gaussian problemthe required PDF has no closed form The bootstrap filterrepresents the required PDF as a set of random sampleswhich works as an alternative to the function over state spaceThis filter is a recursive algorithm for propagation and updateof these samples for the discrete time problem The Bayesrule the key update stage of the method is implemented as aweighted bootstrap [1]
The main idea of the BPF is intuitive and direct At thebeginning 119873 particles 119909
+
0119894(119894 = 1 119873) are randomly
generated based on the known initial PDF 119901(1199090) At each
step of time 119896 the particles are propagated to the nextstep using the dynamics equation [2] After receiving themeasurement at time 119896 the PDF 119901(119910
119896| 119909119894
119896minus1) is evaluated
That is the conditional relative likelihood of each particle 119909minus119896119894
is calculated If an 119898-dimensional measurement equation isgiven as 119910
119896= ℎ (119909
119896)+V119896and V119896is a Gaussian random variable
with a mean of zero and a variance of 119877 V119896sim 119873(0 119877) then
a relative likelihood 119902119894that the measurement is equal to a
specific measurement 119910lowast given the premise that 119909119896is equal
to the particle 119909119894119896minus1
can be computed as follows [2]
119902119894= 119901 (119910
119896= 119910lowast
| 119909119896= 119909119894
119896minus1) = 119901 lfloorV
119896= 119910lowast
minus ℎ (119909119894
119896minus1)rfloor
sim1
(2120587)1198982
|119877|12
sdot exp(minus[119910lowastminus ℎ (119909
119894
119896minus1)]
T119877minus1[119910lowastminus ℎ (119909
119894
119896minus1)]
2)
(1)
In (1) the symbol simmeans that the probability is directlyproportional to the right side So if the equation is used forall particles 119909
minus
119896119894 then the relative likelihood that the state
is equal to each particle is correct The relative likelihoodvalues are normalized to ensure that the sum of all likelihoodvalues is equal to one Next a new set of randomly generatedparticles 119909
+
119896119894is computed from the relative likelihood 119902
119894
In the resampling step roughening was used in order toprevent sample impoverishment At this point there is a setof particles 119909
+
119896119894that are distributed according to the PDF
119901(119909119896| 119910119896) and any desired statistical measure of it can be
computed [2]The particle filter adjusted to the orbit determination
problem can be summarized as follows
(1) The dynamic and the measurement equations aregiven as
x119896+1
= f119896(x119896) + w119896
y119896= h119896(x119896) + ^119896
(2)
where w119896and ^
119896are independent white noise pro-
cesses with known PDFs(2)119873 initial particles x+
0119894(119894 = 1 119873) are randomly
generated on the basis of the known initial state PDF119901(x0)119873 is a parameter chosen as a trade-off between
computational cost and estimation accuracy [2](3) For 119896 = 1 2
(a) in the time propagation step obtain a priori(predicted) particles xminus
119896119894 using the dynamics
equation and the PDF of the process noise bothknown
xminus119896119894
= f119896minus1
(x+119896minus1119894
) + w119894119896minus1
119894 = 1 119873 (3)
where each noise vector w119894119896minus1
is randomlygenerated on the basis of the known PDF ofw119896minus1
(b) compute the relative likelihood 119902
119894of each
particle 119909minus
119896119894 conditioned on the measurement
y119896 using the nonlinear measurement equation
and the PDF of themeasurement noise as in (1)(c) normalize the relative likelihood values
119902119894=
119902119894
sum119873
119895=1119902119895
(4)
(d) in the resampling step generate a set of aposteriori (resampled) particles x+
119896119894 on the basis
of the relative likelihood 119902119894
(e) now there is a set of particles x+119896119894distributed
according to the PDF 119901(x119896
| y119896) and mean
and covariance statistical measures can be com-puted
In the implementation of the bootstrap filter there is onlya small overlap between the prior and the likelihood
There are some procedures that may be implementedfor combating the consequent reduction in the number oftruly distinct sample values such as increasing the number ofparticles roughening and prior editing [1] Here they wereimplemented a bootstrap particle filter with resampling (PF)a PF with roughening (PFR) and a PFR with prior editing(PFPE) in order to evaluate roughening and prior editingstrategies for dealing with sample impoverishment
Mathematical Problems in Engineering 3
21 Roughening Roughening will be the first remedy forsample impoverishment to be discussed It restrains theresampled particles spread (a posteriori particles) by addingrandom noise to them which is similar to adding artifi-cial process noise to the Kalman filter [2] In rougheningapproach the a posteriori particles are modified after theresampling step as follows
x+119896119894(119898) = x+
119896119894(119898) + Δx (119898) 119898 = 1 119899
Δx (119898) sim (0 119870M (119898)119873minus1119899
)
(5)
Δx(119898) is a zero-mean random variable (usually Gaussian)119870is a constant tuning parameter119873 is the number of particles119899 is the state space dimension and M is a vector of themaximum difference between the particle elements beforeroughening The119898th element of theM vector is given as
M (119898) = max119894119895
10038161003816100381610038161003816x+119896119894(119898) minus x+
119896119895(119898)
10038161003816100381610038161003816 119898 = 1 119899 (6)
where 119896 is the step time and 119894 and 119895 are particle numbersThe tuning parameter 119870 choice is a compromise Being
too large a value would blur the distribution but being toosmall it would produce tight clusters of points around theoriginal particles [1] In this paper119870 = 01
22 Prior Editing Prior editing can be tried if rougheningdoes not prevent sample impoverishment Such approachedits the a posteriori particles from the prior time instantx+119896minus1119894
(after roughening) if the a priori particle from actualinstant xminus
119896119894 does not satisfy a coarse pragmatic acceptance
test [1] Therefore this procedure artificially boosts thenumber of samples of the prior editing in the neighborhoodof the likelihood for if an a priori particle is in a region ofstate space with small 119902
119894 it is rejected Then the a priori
rejected particle can be roughened asmany times as requiredaccording to (5) until it is in a region of significant 119902
119894[2]The
prior editing was implemented as follows [1]
(a) Pass the resampled sample from previous instantx+119896minus1
through roughening and system model to gen-erate the predicted sample from current instant xminus
119896
(b) Calculate 120592119896119894
= 119911119896minus h(xminus
119896119894) the residual between
the true and the predicted measurements for the 119894thparticle of the sample considering that the actualinstant observation is available
(c) If the magnitude of 120592119896119894
is higher than six standarddeviations of the measurement noise then it is highlyunlikely that xminus
119896119894is chosen as an a posteriori particle
In this case xminus119896119894
is rejected and x+119896minus1119894
is roughenedagain and passes one more time through dynamicmodel to generate a new a priori particle xminus
119896119894 As x+119896minus1119894
has already passed through roughening and generateda rejected predicted particle this procedure may berepeated while xminus
119896119894is in a region of no negligible
probability
Due to the high computational cost involving priorediting such approach was done only once It is importantto make it clear that here the 119894th particle is in fact an 119899-dimensional vector while a sample is a 119899 times 119873 matrix wherethe 119899th state variable is represented by119873 particles
The accommodation of roughening and prior editing inthe bootstrap particle filter algorithm can be schematized asFigure 1 shows
3 Orbit Determination
The orbit determination is a process for obtaining valuesof the parameters that completely specify the motion of anorbiting body (as an artificial satellite) based on a set ofobservations of the body It involves nonlinear dynamicaland nonlinear measurement systems which depends onthe tracking system and the estimation technique [11 12]The dynamical system model consists of describing satelliteorbital motion which includes Earthrsquos rotation effects andperturbationmodels andmeasurements modelsThese mod-els depend on the state variables initial conditions as well as avariety of parameters which affect both the dynamic motionsas themeasurement process [13] Due to the complexity of theappliedmodels usually it is not possible to solve suchmodelsequations directly for any of these parameters from a givenset of observations
The observationmay be obtained from the ground stationnetworks using laser radar Doppler or space navigationsystems as the GPS The choice of the tracking systemdepends on a compromise between the goals of the missionand the available tools In the case of the GPS the advantagesare global coverage high precision low cost and autonomousnavigation resources The GPS may provide orbit deter-mination with accuracy at least as good as the methodsusing ground tracking networksThe latter provides standardprecision around tens of meters and the former can provideprecision as tight as some centimetresTheGPS provides at agiven instant a set of many redundant measurements whichmakes the orbit position observable geometrically
After some advances of technology the single frequencyGPS receivers provide a good basis to achieve fair precision atrelatively low cost still attaining the accuracy requirementsof the mission operation The GPS allows the receiver todetermine its position and time geometrically anywhereat any instant with data from at least four satellites Theprinciple of navigation by satellites is based on sending signalsand data from theGPS satellites to a receiver located on boardthe satellite whose orbit needs to be determinedThis receivermeasures the travel time of the signal and then calculates thedistance between the receiver and the GPS satellite Thosemeasurements of distances are called pseudoranges
The instantaneous orbit determination using GPS satel-lites is based on the geometric method In such method theobserver knows the set ofGPS satellites position in a referenceframe obtaining its ownposition in the same reference frame
31 Dynamics Model In the case of orbit determination viaGPS the ordinary differential equations which represent the
4 Mathematical Problems in Engineering
Prediction
Resampling
No
Prior editing
Yes
Maximum difference between
Roughening
Maximum difference between
Roughening
Prediction
Residual
119858k minus 119841(119857minuski)
119857+kminus1i rarr 119857
minuski
119857+kminus1i = kminus1i + Δ119857
the particles vectors rarr Δ119857
k = k minus 1
k = k + 1
ki
rarr Δ119857
119857+ki = ki + Δ119857
|119858k minus (119857+kminus1i)| gt 6120590h
the particles vectors
119857+kminus1i rarr 119857
minuski
Figure 1 Roughening and prior editing accommodation in the BPF algorithm
dynamic model are in its simplest form given traditionallyas follows
r = k
k = minus120583r1199033
+ a + wV
= 119889
119889 = 119908119889
(7)
wherein the variables are placed in the inertial referenceframe In (7) r is the vector of the position components(119909 119910 119911) k is the velocity vector a represents the modelledperturbing accelerations wV is the white noise vector withcovariance Q 119887 is the user satellite GPS clock bias 119889 is theuser satellite GPS clock drift and 119908
119889is the noise associated
with the GPS clock The GPS receiver clock offset was nottaken into account so as not to obscure the conclusionsdrawn in this paper due to introduction of clock offsetmodelsin the filters Indeed the receiver clock offset was beforehand
obtained and used to correct the GPS measurements sothat the measurements are free from the error derived fromreceiver clock offset
32 Forces Model There are gravitational and nongravi-tational forces that affect the orbit of an Earthrsquos artificialsatellite The main disturbing forces of gravitational natureare the nonuniform distribution of Earthrsquos mass ocean andterrestrial tides and the gravitational attraction of the Sunand the Moon And the principal nongravitational effects areEarth atmospheric drag direct and reflected solar radiationpressure electric drag emissivity effects relativistic effectsand meteorites impacts
The disturbing effects are in general included accordingto the physical situation presented and to the accuracy that isintended for the orbit determination Here only a minimumset of perturbations was included which enable analyzing theperformance of the particle filter [14] geopotential [15] directsolar radiation pressure [16 17] and third body point masseffect of the Sun and the Moon [18 19]
Mathematical Problems in Engineering 5
33 Observations Model The nonlinear equation of theobservation model is
y119896= h119896(x119896 119905119896) + ^119896 (8)
where at instant 119905119896 y119896is the vector of119898 observations h
119896(x119896)
is the nonlinear function of state x119896 with dimension 119898
and ^119896is the observation errors vector with dimension 119898
and covariance R119896 For the present application the ion-free
pseudorange measurements from the Jason-2 GPS receiverare used Also the receiver clock offset was computedbefore and used to correct the pseudorange measurementsAdditionally the nonlinear pseudorange measurement wasmodelled according to [20]
4 Results
The tests and the analysis for the bootstrap particle filterand two procedures for avoiding sample impoverishment(roughening and prior editing) are presented To validateand to analyze the methods real GPS data from the Jason-2 satellite are used Ocean Surface Topography Mission(OSTM)Jason-2 is a follow-on altimetry mission to the verysuccessful TOPEXPoseidon mission and Jason-1 It is a jointmission between NASA and CNES (French space agency)launched June 20 2008 Jason-2 has a repeat period ofapproximately 10 days with 254 passes per cycle Its nodalperiod is 674572 sec (near 187 hours) Sometimes there maybe anomalous or missing data Occasionally Jason-2 mustperform maneuvers to maintain orbit When the satellitedetects something abnormal it will go into safe hold and willturn off all instruments and no data will be collected [21]
The filters estimated position and velocity are comparedwith Jason-2 precise orbit ephemeris (POE) from JPLNASAThe test conditions consider real ion-free pseudorange datacollected by the GPS receiver on-board Jason-2 on October22 2010 presenting up to 12 GPS satellites tracked The testswere limited to 55 hours of GPS data spaced 10 s After thatthere was an undesirable data gap which could spoil thetest case Such 55-hour arc (near 3 Jason-2 orbital periods)was considered sufficient for evaluating the bootstrap particlefilter and roughening and prior editing approaches in thisorbit determination application
The force model comprises perturbations due to geopo-tential up to order and degree 50 times 50 direct solar radiationpressure and Sun-Moon gravitational attraction This modelof forces is suitable for implementation in orbit determinationbecause of the low computational cost added comparedto the improvement in the results accuracy [22ndash24] Thepseudorange measurements were corrected to the first orderwith respect to ionosphere
This work is not a search for results accuracy It aimsat analyzing the application of a bootstrap filter to the orbitdetermination problem The analysis is based on comparingthe errors in position (translated to the orbital radial normaland along-track RNT components) among three solutions
(1) The bootstrap particle filter with resampling appliedwithout any sample impoverishment procedure(named ldquoPFrdquo in the results)
(2) The bootstrap particle filter applied with roughening(named ldquoPFRrdquo in the results)
(3) The bootstrap particle filter applied with rougheningand prior editing (named ldquoPFPErdquoin the results)
The RNT system interpretation is straightforward theradial component ldquoRrdquo points to the nadir direction the nor-mal ldquoNrdquo is perpendicular to orbital plane and the transversal(along-track) ldquoTrdquo is orthogonal to ldquoRrdquo and ldquoNrdquo and it isalso the velocity component Thus it is possible to analyzewhat happens with the orbital RNT components and theorbit evolution as well There is also interest for processingtime in order to analyze the computational efforts face to theaccuracy achieved by each algorithm
Regarding time of processing 119905CPU it was expected thatthe time required for the bootstrap particle filter algorithmwas increasing in two scenarios if the number of particlesrises and if roughening and prior editing were added to thealgorithm According to the estimator nature each elementof the state was replaced by an array of 119873 particles where119873 is a trade-off between computational cost and estimationaccuracy Here tests were done for 17 100 300 and 700particles
As said before prior editing recomputes any particle thatdoes not match a specific criterion Therefore a relevanttest is to observe the instant when each algorithm startsrejecting particles which will be presented The goal is toverify whether as a procedure is included it delays therejection process It will also be analyzedwhether the numberof particles affects the particle rejection that is whetherits increase may work as an approach for avoiding sampleimpoverishment
If 119873 is set (so the analysis is per line in Table 1) it isnoticeable that 119905CPU CPU time measured for PF and PFR isvery similar with a maximum 3 of difference However thealgorithm that includes prior editing PFPE is significantlymore costly reaching 39 of increase This was expectedfor PFPE because of the particles that do not pass theacceptance test and need to return to prior instant Regardingthe effects of increasing the number of particle for the samealgorithm (so the analysis is per column in Table 1) the raisein processing time was 83 from 17 to 100 particles 67from 100 to 300 and 59 from 300 to 700 Considering thatfor 17 100 300 and 700 particles the increase in 119873 is 6 3and 23 times respectively then 119905CPU increase is not directlyproportional to the number of particles used Therefore theCPU time and the increase in the number of particles showthat the time of processing is related to the chosen numberof particles only when the number of particles changes but ithas no relation with the estimator implemented
For computing time of processing and for all the simu-lations shown a computer Intel Core i5-2430M processor of240GHz with 270GB of RAM was used The program wascoded in FORTRAN 77 within operating system WindowsXP and compiler Compaq Visual Fortran version 61
When some particles do not reach prior editing criterion(ie the magnitude of 120592
119896119894is higher than six standard
deviation of the measurement noise) they need to be editedin the prior instant of timeThe first instant when any particle
6 Mathematical Problems in Engineering
Table 1 Time of processing
119873 PF PFR PFPE
119905CPU
17 44 s 45 s 1min 23 s100 4min 16 s 4min 19 s 7min 07 s300 12min 49 s 13min 05 s 20min 56 s700 31min 09 s 31min 27 s 50min 31 s
Table 2 Instant of the first rejection of particles occurrence
119873 PF PFR PFPE
119905PE
17 16min 00 s 26min 40 s 26min 40 s100 10min 00 s 45min 50 s 45min 50 s300 9min 20 s 45min 50 s 45min 50 s700 9min 00 s 45min 50 s 45min 50 s
needed to be edited 119905PE was computed for each algorithmand119873 as can be verified in Table 2
In Table 2 the rejection of particles was first detectedin the PF algorithm despite the number of particles usedThis was expected since no procedure in order to combatthe number of truly distinct samples reduction was usedin this algorithm And the instant when the first rejectionoccurred in PFR and PFPE concurred for all changing inthe number of particles This is considerably consistentsince prior editing procedure depends first on rougheningimplementation Regarding the increase in the number ofparticles (from 17 to 100) it is noticeable that when proce-dures for avoiding sample impoverishment are adopted (inPFR and PFPE cases) the instant when the first rejection ofparticles is detected is delayed in 42 Nevertheless for theother cases analyzed (300 and 700 particles) such instantremains the same This suggests that increasing 119873 as anapproach for minimizing the sample impoverishment issueis a little efficient with a very high computational burdenas seen in Table 1 For PF the results were not conclusiveIt seems that the higher the number of particles the fastertheir impoverishment if nothing is done for avoiding sampleimpoverishment
As said before the number of particles is chosen as atrade-off between computational cost and estimation accu-racy The results in Table 3 present mean and standarddeviation of the errors in RNT components evaluated for119873 = 17 100 300 and 700 If only these statistics areanalyzed it is clear that the estimation accuracy improvesas the number of particles increases The largest standarddeviation occurred for PFPE (119873 = 17) In the along-trackcomponent a divergence occurrence in all algorithms (119873 =
17) was detected which can be verified by the high meanand standard deviation values obtained in the three casesSuch divergence disappears when119873 is increased When119873 =
700 the statistics and the errors behavior were very similarin the results obtained by PFR and PFPE versions By theinformation presented it is possible to conclude that if thenumber of particles is very small any sample impoverishmentavoidance procedure will not be effective Even more thePFPE approach as used here (particles edition executed only
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
3200
2800
2400
2000
1600
1200
800
400
0
minus400
PF with prior editing N = 17
Figure 2 Errors in RNT coordinates for PFPE simulation (119873 = 17)
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
60
30
0
minus30
minus60
minus90
minus120
PF with roughening N = 300
Figure 3 Errors in RNT coordinates for PFR simulation (119873 = 300)
once) does not present any significant improvement facingthe PFR procedure no matter the number of particles usedAnd taking into account the higher computational cost foronly one edition of particles if the PFPE is implemented asmany times as necessary the computation burden is enoughto contraindicate this procedure use even if the results areimproved
In order to show the behavior of the errors in termsof RNT coordinates Figures 2 3 and 4 are presentedFigure 2 shows the worst result the solution obtained forPFPE algorithm considering 119873 = 17 where the divergencein along-track coordinate is shown Figure 3 shows a PFRsolution for 119873 = 300 while Figure 4 presents the 119873 = 700
solution It was chosen to introduce PFR solutions becausethis is the algorithm with better performance during orbitdetermination process The errors decrease considerably inall implementations for 100 or more particles (see Table 3)
Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
21 Roughening Roughening will be the first remedy forsample impoverishment to be discussed It restrains theresampled particles spread (a posteriori particles) by addingrandom noise to them which is similar to adding artifi-cial process noise to the Kalman filter [2] In rougheningapproach the a posteriori particles are modified after theresampling step as follows
x+119896119894(119898) = x+
119896119894(119898) + Δx (119898) 119898 = 1 119899
Δx (119898) sim (0 119870M (119898)119873minus1119899
)
(5)
Δx(119898) is a zero-mean random variable (usually Gaussian)119870is a constant tuning parameter119873 is the number of particles119899 is the state space dimension and M is a vector of themaximum difference between the particle elements beforeroughening The119898th element of theM vector is given as
M (119898) = max119894119895
10038161003816100381610038161003816x+119896119894(119898) minus x+
119896119895(119898)
10038161003816100381610038161003816 119898 = 1 119899 (6)
where 119896 is the step time and 119894 and 119895 are particle numbersThe tuning parameter 119870 choice is a compromise Being
too large a value would blur the distribution but being toosmall it would produce tight clusters of points around theoriginal particles [1] In this paper119870 = 01
22 Prior Editing Prior editing can be tried if rougheningdoes not prevent sample impoverishment Such approachedits the a posteriori particles from the prior time instantx+119896minus1119894
(after roughening) if the a priori particle from actualinstant xminus
119896119894 does not satisfy a coarse pragmatic acceptance
test [1] Therefore this procedure artificially boosts thenumber of samples of the prior editing in the neighborhoodof the likelihood for if an a priori particle is in a region ofstate space with small 119902
119894 it is rejected Then the a priori
rejected particle can be roughened asmany times as requiredaccording to (5) until it is in a region of significant 119902
119894[2]The
prior editing was implemented as follows [1]
(a) Pass the resampled sample from previous instantx+119896minus1
through roughening and system model to gen-erate the predicted sample from current instant xminus
119896
(b) Calculate 120592119896119894
= 119911119896minus h(xminus
119896119894) the residual between
the true and the predicted measurements for the 119894thparticle of the sample considering that the actualinstant observation is available
(c) If the magnitude of 120592119896119894
is higher than six standarddeviations of the measurement noise then it is highlyunlikely that xminus
119896119894is chosen as an a posteriori particle
In this case xminus119896119894
is rejected and x+119896minus1119894
is roughenedagain and passes one more time through dynamicmodel to generate a new a priori particle xminus
119896119894 As x+119896minus1119894
has already passed through roughening and generateda rejected predicted particle this procedure may berepeated while xminus
119896119894is in a region of no negligible
probability
Due to the high computational cost involving priorediting such approach was done only once It is importantto make it clear that here the 119894th particle is in fact an 119899-dimensional vector while a sample is a 119899 times 119873 matrix wherethe 119899th state variable is represented by119873 particles
The accommodation of roughening and prior editing inthe bootstrap particle filter algorithm can be schematized asFigure 1 shows
3 Orbit Determination
The orbit determination is a process for obtaining valuesof the parameters that completely specify the motion of anorbiting body (as an artificial satellite) based on a set ofobservations of the body It involves nonlinear dynamicaland nonlinear measurement systems which depends onthe tracking system and the estimation technique [11 12]The dynamical system model consists of describing satelliteorbital motion which includes Earthrsquos rotation effects andperturbationmodels andmeasurements modelsThese mod-els depend on the state variables initial conditions as well as avariety of parameters which affect both the dynamic motionsas themeasurement process [13] Due to the complexity of theappliedmodels usually it is not possible to solve suchmodelsequations directly for any of these parameters from a givenset of observations
The observationmay be obtained from the ground stationnetworks using laser radar Doppler or space navigationsystems as the GPS The choice of the tracking systemdepends on a compromise between the goals of the missionand the available tools In the case of the GPS the advantagesare global coverage high precision low cost and autonomousnavigation resources The GPS may provide orbit deter-mination with accuracy at least as good as the methodsusing ground tracking networksThe latter provides standardprecision around tens of meters and the former can provideprecision as tight as some centimetresTheGPS provides at agiven instant a set of many redundant measurements whichmakes the orbit position observable geometrically
After some advances of technology the single frequencyGPS receivers provide a good basis to achieve fair precision atrelatively low cost still attaining the accuracy requirementsof the mission operation The GPS allows the receiver todetermine its position and time geometrically anywhereat any instant with data from at least four satellites Theprinciple of navigation by satellites is based on sending signalsand data from theGPS satellites to a receiver located on boardthe satellite whose orbit needs to be determinedThis receivermeasures the travel time of the signal and then calculates thedistance between the receiver and the GPS satellite Thosemeasurements of distances are called pseudoranges
The instantaneous orbit determination using GPS satel-lites is based on the geometric method In such method theobserver knows the set ofGPS satellites position in a referenceframe obtaining its ownposition in the same reference frame
31 Dynamics Model In the case of orbit determination viaGPS the ordinary differential equations which represent the
4 Mathematical Problems in Engineering
Prediction
Resampling
No
Prior editing
Yes
Maximum difference between
Roughening
Maximum difference between
Roughening
Prediction
Residual
119858k minus 119841(119857minuski)
119857+kminus1i rarr 119857
minuski
119857+kminus1i = kminus1i + Δ119857
the particles vectors rarr Δ119857
k = k minus 1
k = k + 1
ki
rarr Δ119857
119857+ki = ki + Δ119857
|119858k minus (119857+kminus1i)| gt 6120590h
the particles vectors
119857+kminus1i rarr 119857
minuski
Figure 1 Roughening and prior editing accommodation in the BPF algorithm
dynamic model are in its simplest form given traditionallyas follows
r = k
k = minus120583r1199033
+ a + wV
= 119889
119889 = 119908119889
(7)
wherein the variables are placed in the inertial referenceframe In (7) r is the vector of the position components(119909 119910 119911) k is the velocity vector a represents the modelledperturbing accelerations wV is the white noise vector withcovariance Q 119887 is the user satellite GPS clock bias 119889 is theuser satellite GPS clock drift and 119908
119889is the noise associated
with the GPS clock The GPS receiver clock offset was nottaken into account so as not to obscure the conclusionsdrawn in this paper due to introduction of clock offsetmodelsin the filters Indeed the receiver clock offset was beforehand
obtained and used to correct the GPS measurements sothat the measurements are free from the error derived fromreceiver clock offset
32 Forces Model There are gravitational and nongravi-tational forces that affect the orbit of an Earthrsquos artificialsatellite The main disturbing forces of gravitational natureare the nonuniform distribution of Earthrsquos mass ocean andterrestrial tides and the gravitational attraction of the Sunand the Moon And the principal nongravitational effects areEarth atmospheric drag direct and reflected solar radiationpressure electric drag emissivity effects relativistic effectsand meteorites impacts
The disturbing effects are in general included accordingto the physical situation presented and to the accuracy that isintended for the orbit determination Here only a minimumset of perturbations was included which enable analyzing theperformance of the particle filter [14] geopotential [15] directsolar radiation pressure [16 17] and third body point masseffect of the Sun and the Moon [18 19]
Mathematical Problems in Engineering 5
33 Observations Model The nonlinear equation of theobservation model is
y119896= h119896(x119896 119905119896) + ^119896 (8)
where at instant 119905119896 y119896is the vector of119898 observations h
119896(x119896)
is the nonlinear function of state x119896 with dimension 119898
and ^119896is the observation errors vector with dimension 119898
and covariance R119896 For the present application the ion-free
pseudorange measurements from the Jason-2 GPS receiverare used Also the receiver clock offset was computedbefore and used to correct the pseudorange measurementsAdditionally the nonlinear pseudorange measurement wasmodelled according to [20]
4 Results
The tests and the analysis for the bootstrap particle filterand two procedures for avoiding sample impoverishment(roughening and prior editing) are presented To validateand to analyze the methods real GPS data from the Jason-2 satellite are used Ocean Surface Topography Mission(OSTM)Jason-2 is a follow-on altimetry mission to the verysuccessful TOPEXPoseidon mission and Jason-1 It is a jointmission between NASA and CNES (French space agency)launched June 20 2008 Jason-2 has a repeat period ofapproximately 10 days with 254 passes per cycle Its nodalperiod is 674572 sec (near 187 hours) Sometimes there maybe anomalous or missing data Occasionally Jason-2 mustperform maneuvers to maintain orbit When the satellitedetects something abnormal it will go into safe hold and willturn off all instruments and no data will be collected [21]
The filters estimated position and velocity are comparedwith Jason-2 precise orbit ephemeris (POE) from JPLNASAThe test conditions consider real ion-free pseudorange datacollected by the GPS receiver on-board Jason-2 on October22 2010 presenting up to 12 GPS satellites tracked The testswere limited to 55 hours of GPS data spaced 10 s After thatthere was an undesirable data gap which could spoil thetest case Such 55-hour arc (near 3 Jason-2 orbital periods)was considered sufficient for evaluating the bootstrap particlefilter and roughening and prior editing approaches in thisorbit determination application
The force model comprises perturbations due to geopo-tential up to order and degree 50 times 50 direct solar radiationpressure and Sun-Moon gravitational attraction This modelof forces is suitable for implementation in orbit determinationbecause of the low computational cost added comparedto the improvement in the results accuracy [22ndash24] Thepseudorange measurements were corrected to the first orderwith respect to ionosphere
This work is not a search for results accuracy It aimsat analyzing the application of a bootstrap filter to the orbitdetermination problem The analysis is based on comparingthe errors in position (translated to the orbital radial normaland along-track RNT components) among three solutions
(1) The bootstrap particle filter with resampling appliedwithout any sample impoverishment procedure(named ldquoPFrdquo in the results)
(2) The bootstrap particle filter applied with roughening(named ldquoPFRrdquo in the results)
(3) The bootstrap particle filter applied with rougheningand prior editing (named ldquoPFPErdquoin the results)
The RNT system interpretation is straightforward theradial component ldquoRrdquo points to the nadir direction the nor-mal ldquoNrdquo is perpendicular to orbital plane and the transversal(along-track) ldquoTrdquo is orthogonal to ldquoRrdquo and ldquoNrdquo and it isalso the velocity component Thus it is possible to analyzewhat happens with the orbital RNT components and theorbit evolution as well There is also interest for processingtime in order to analyze the computational efforts face to theaccuracy achieved by each algorithm
Regarding time of processing 119905CPU it was expected thatthe time required for the bootstrap particle filter algorithmwas increasing in two scenarios if the number of particlesrises and if roughening and prior editing were added to thealgorithm According to the estimator nature each elementof the state was replaced by an array of 119873 particles where119873 is a trade-off between computational cost and estimationaccuracy Here tests were done for 17 100 300 and 700particles
As said before prior editing recomputes any particle thatdoes not match a specific criterion Therefore a relevanttest is to observe the instant when each algorithm startsrejecting particles which will be presented The goal is toverify whether as a procedure is included it delays therejection process It will also be analyzedwhether the numberof particles affects the particle rejection that is whetherits increase may work as an approach for avoiding sampleimpoverishment
If 119873 is set (so the analysis is per line in Table 1) it isnoticeable that 119905CPU CPU time measured for PF and PFR isvery similar with a maximum 3 of difference However thealgorithm that includes prior editing PFPE is significantlymore costly reaching 39 of increase This was expectedfor PFPE because of the particles that do not pass theacceptance test and need to return to prior instant Regardingthe effects of increasing the number of particle for the samealgorithm (so the analysis is per column in Table 1) the raisein processing time was 83 from 17 to 100 particles 67from 100 to 300 and 59 from 300 to 700 Considering thatfor 17 100 300 and 700 particles the increase in 119873 is 6 3and 23 times respectively then 119905CPU increase is not directlyproportional to the number of particles used Therefore theCPU time and the increase in the number of particles showthat the time of processing is related to the chosen numberof particles only when the number of particles changes but ithas no relation with the estimator implemented
For computing time of processing and for all the simu-lations shown a computer Intel Core i5-2430M processor of240GHz with 270GB of RAM was used The program wascoded in FORTRAN 77 within operating system WindowsXP and compiler Compaq Visual Fortran version 61
When some particles do not reach prior editing criterion(ie the magnitude of 120592
119896119894is higher than six standard
deviation of the measurement noise) they need to be editedin the prior instant of timeThe first instant when any particle
6 Mathematical Problems in Engineering
Table 1 Time of processing
119873 PF PFR PFPE
119905CPU
17 44 s 45 s 1min 23 s100 4min 16 s 4min 19 s 7min 07 s300 12min 49 s 13min 05 s 20min 56 s700 31min 09 s 31min 27 s 50min 31 s
Table 2 Instant of the first rejection of particles occurrence
119873 PF PFR PFPE
119905PE
17 16min 00 s 26min 40 s 26min 40 s100 10min 00 s 45min 50 s 45min 50 s300 9min 20 s 45min 50 s 45min 50 s700 9min 00 s 45min 50 s 45min 50 s
needed to be edited 119905PE was computed for each algorithmand119873 as can be verified in Table 2
In Table 2 the rejection of particles was first detectedin the PF algorithm despite the number of particles usedThis was expected since no procedure in order to combatthe number of truly distinct samples reduction was usedin this algorithm And the instant when the first rejectionoccurred in PFR and PFPE concurred for all changing inthe number of particles This is considerably consistentsince prior editing procedure depends first on rougheningimplementation Regarding the increase in the number ofparticles (from 17 to 100) it is noticeable that when proce-dures for avoiding sample impoverishment are adopted (inPFR and PFPE cases) the instant when the first rejection ofparticles is detected is delayed in 42 Nevertheless for theother cases analyzed (300 and 700 particles) such instantremains the same This suggests that increasing 119873 as anapproach for minimizing the sample impoverishment issueis a little efficient with a very high computational burdenas seen in Table 1 For PF the results were not conclusiveIt seems that the higher the number of particles the fastertheir impoverishment if nothing is done for avoiding sampleimpoverishment
As said before the number of particles is chosen as atrade-off between computational cost and estimation accu-racy The results in Table 3 present mean and standarddeviation of the errors in RNT components evaluated for119873 = 17 100 300 and 700 If only these statistics areanalyzed it is clear that the estimation accuracy improvesas the number of particles increases The largest standarddeviation occurred for PFPE (119873 = 17) In the along-trackcomponent a divergence occurrence in all algorithms (119873 =
17) was detected which can be verified by the high meanand standard deviation values obtained in the three casesSuch divergence disappears when119873 is increased When119873 =
700 the statistics and the errors behavior were very similarin the results obtained by PFR and PFPE versions By theinformation presented it is possible to conclude that if thenumber of particles is very small any sample impoverishmentavoidance procedure will not be effective Even more thePFPE approach as used here (particles edition executed only
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
3200
2800
2400
2000
1600
1200
800
400
0
minus400
PF with prior editing N = 17
Figure 2 Errors in RNT coordinates for PFPE simulation (119873 = 17)
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
60
30
0
minus30
minus60
minus90
minus120
PF with roughening N = 300
Figure 3 Errors in RNT coordinates for PFR simulation (119873 = 300)
once) does not present any significant improvement facingthe PFR procedure no matter the number of particles usedAnd taking into account the higher computational cost foronly one edition of particles if the PFPE is implemented asmany times as necessary the computation burden is enoughto contraindicate this procedure use even if the results areimproved
In order to show the behavior of the errors in termsof RNT coordinates Figures 2 3 and 4 are presentedFigure 2 shows the worst result the solution obtained forPFPE algorithm considering 119873 = 17 where the divergencein along-track coordinate is shown Figure 3 shows a PFRsolution for 119873 = 300 while Figure 4 presents the 119873 = 700
solution It was chosen to introduce PFR solutions becausethis is the algorithm with better performance during orbitdetermination process The errors decrease considerably inall implementations for 100 or more particles (see Table 3)
Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Prediction
Resampling
No
Prior editing
Yes
Maximum difference between
Roughening
Maximum difference between
Roughening
Prediction
Residual
119858k minus 119841(119857minuski)
119857+kminus1i rarr 119857
minuski
119857+kminus1i = kminus1i + Δ119857
the particles vectors rarr Δ119857
k = k minus 1
k = k + 1
ki
rarr Δ119857
119857+ki = ki + Δ119857
|119858k minus (119857+kminus1i)| gt 6120590h
the particles vectors
119857+kminus1i rarr 119857
minuski
Figure 1 Roughening and prior editing accommodation in the BPF algorithm
dynamic model are in its simplest form given traditionallyas follows
r = k
k = minus120583r1199033
+ a + wV
= 119889
119889 = 119908119889
(7)
wherein the variables are placed in the inertial referenceframe In (7) r is the vector of the position components(119909 119910 119911) k is the velocity vector a represents the modelledperturbing accelerations wV is the white noise vector withcovariance Q 119887 is the user satellite GPS clock bias 119889 is theuser satellite GPS clock drift and 119908
119889is the noise associated
with the GPS clock The GPS receiver clock offset was nottaken into account so as not to obscure the conclusionsdrawn in this paper due to introduction of clock offsetmodelsin the filters Indeed the receiver clock offset was beforehand
obtained and used to correct the GPS measurements sothat the measurements are free from the error derived fromreceiver clock offset
32 Forces Model There are gravitational and nongravi-tational forces that affect the orbit of an Earthrsquos artificialsatellite The main disturbing forces of gravitational natureare the nonuniform distribution of Earthrsquos mass ocean andterrestrial tides and the gravitational attraction of the Sunand the Moon And the principal nongravitational effects areEarth atmospheric drag direct and reflected solar radiationpressure electric drag emissivity effects relativistic effectsand meteorites impacts
The disturbing effects are in general included accordingto the physical situation presented and to the accuracy that isintended for the orbit determination Here only a minimumset of perturbations was included which enable analyzing theperformance of the particle filter [14] geopotential [15] directsolar radiation pressure [16 17] and third body point masseffect of the Sun and the Moon [18 19]
Mathematical Problems in Engineering 5
33 Observations Model The nonlinear equation of theobservation model is
y119896= h119896(x119896 119905119896) + ^119896 (8)
where at instant 119905119896 y119896is the vector of119898 observations h
119896(x119896)
is the nonlinear function of state x119896 with dimension 119898
and ^119896is the observation errors vector with dimension 119898
and covariance R119896 For the present application the ion-free
pseudorange measurements from the Jason-2 GPS receiverare used Also the receiver clock offset was computedbefore and used to correct the pseudorange measurementsAdditionally the nonlinear pseudorange measurement wasmodelled according to [20]
4 Results
The tests and the analysis for the bootstrap particle filterand two procedures for avoiding sample impoverishment(roughening and prior editing) are presented To validateand to analyze the methods real GPS data from the Jason-2 satellite are used Ocean Surface Topography Mission(OSTM)Jason-2 is a follow-on altimetry mission to the verysuccessful TOPEXPoseidon mission and Jason-1 It is a jointmission between NASA and CNES (French space agency)launched June 20 2008 Jason-2 has a repeat period ofapproximately 10 days with 254 passes per cycle Its nodalperiod is 674572 sec (near 187 hours) Sometimes there maybe anomalous or missing data Occasionally Jason-2 mustperform maneuvers to maintain orbit When the satellitedetects something abnormal it will go into safe hold and willturn off all instruments and no data will be collected [21]
The filters estimated position and velocity are comparedwith Jason-2 precise orbit ephemeris (POE) from JPLNASAThe test conditions consider real ion-free pseudorange datacollected by the GPS receiver on-board Jason-2 on October22 2010 presenting up to 12 GPS satellites tracked The testswere limited to 55 hours of GPS data spaced 10 s After thatthere was an undesirable data gap which could spoil thetest case Such 55-hour arc (near 3 Jason-2 orbital periods)was considered sufficient for evaluating the bootstrap particlefilter and roughening and prior editing approaches in thisorbit determination application
The force model comprises perturbations due to geopo-tential up to order and degree 50 times 50 direct solar radiationpressure and Sun-Moon gravitational attraction This modelof forces is suitable for implementation in orbit determinationbecause of the low computational cost added comparedto the improvement in the results accuracy [22ndash24] Thepseudorange measurements were corrected to the first orderwith respect to ionosphere
This work is not a search for results accuracy It aimsat analyzing the application of a bootstrap filter to the orbitdetermination problem The analysis is based on comparingthe errors in position (translated to the orbital radial normaland along-track RNT components) among three solutions
(1) The bootstrap particle filter with resampling appliedwithout any sample impoverishment procedure(named ldquoPFrdquo in the results)
(2) The bootstrap particle filter applied with roughening(named ldquoPFRrdquo in the results)
(3) The bootstrap particle filter applied with rougheningand prior editing (named ldquoPFPErdquoin the results)
The RNT system interpretation is straightforward theradial component ldquoRrdquo points to the nadir direction the nor-mal ldquoNrdquo is perpendicular to orbital plane and the transversal(along-track) ldquoTrdquo is orthogonal to ldquoRrdquo and ldquoNrdquo and it isalso the velocity component Thus it is possible to analyzewhat happens with the orbital RNT components and theorbit evolution as well There is also interest for processingtime in order to analyze the computational efforts face to theaccuracy achieved by each algorithm
Regarding time of processing 119905CPU it was expected thatthe time required for the bootstrap particle filter algorithmwas increasing in two scenarios if the number of particlesrises and if roughening and prior editing were added to thealgorithm According to the estimator nature each elementof the state was replaced by an array of 119873 particles where119873 is a trade-off between computational cost and estimationaccuracy Here tests were done for 17 100 300 and 700particles
As said before prior editing recomputes any particle thatdoes not match a specific criterion Therefore a relevanttest is to observe the instant when each algorithm startsrejecting particles which will be presented The goal is toverify whether as a procedure is included it delays therejection process It will also be analyzedwhether the numberof particles affects the particle rejection that is whetherits increase may work as an approach for avoiding sampleimpoverishment
If 119873 is set (so the analysis is per line in Table 1) it isnoticeable that 119905CPU CPU time measured for PF and PFR isvery similar with a maximum 3 of difference However thealgorithm that includes prior editing PFPE is significantlymore costly reaching 39 of increase This was expectedfor PFPE because of the particles that do not pass theacceptance test and need to return to prior instant Regardingthe effects of increasing the number of particle for the samealgorithm (so the analysis is per column in Table 1) the raisein processing time was 83 from 17 to 100 particles 67from 100 to 300 and 59 from 300 to 700 Considering thatfor 17 100 300 and 700 particles the increase in 119873 is 6 3and 23 times respectively then 119905CPU increase is not directlyproportional to the number of particles used Therefore theCPU time and the increase in the number of particles showthat the time of processing is related to the chosen numberof particles only when the number of particles changes but ithas no relation with the estimator implemented
For computing time of processing and for all the simu-lations shown a computer Intel Core i5-2430M processor of240GHz with 270GB of RAM was used The program wascoded in FORTRAN 77 within operating system WindowsXP and compiler Compaq Visual Fortran version 61
When some particles do not reach prior editing criterion(ie the magnitude of 120592
119896119894is higher than six standard
deviation of the measurement noise) they need to be editedin the prior instant of timeThe first instant when any particle
6 Mathematical Problems in Engineering
Table 1 Time of processing
119873 PF PFR PFPE
119905CPU
17 44 s 45 s 1min 23 s100 4min 16 s 4min 19 s 7min 07 s300 12min 49 s 13min 05 s 20min 56 s700 31min 09 s 31min 27 s 50min 31 s
Table 2 Instant of the first rejection of particles occurrence
119873 PF PFR PFPE
119905PE
17 16min 00 s 26min 40 s 26min 40 s100 10min 00 s 45min 50 s 45min 50 s300 9min 20 s 45min 50 s 45min 50 s700 9min 00 s 45min 50 s 45min 50 s
needed to be edited 119905PE was computed for each algorithmand119873 as can be verified in Table 2
In Table 2 the rejection of particles was first detectedin the PF algorithm despite the number of particles usedThis was expected since no procedure in order to combatthe number of truly distinct samples reduction was usedin this algorithm And the instant when the first rejectionoccurred in PFR and PFPE concurred for all changing inthe number of particles This is considerably consistentsince prior editing procedure depends first on rougheningimplementation Regarding the increase in the number ofparticles (from 17 to 100) it is noticeable that when proce-dures for avoiding sample impoverishment are adopted (inPFR and PFPE cases) the instant when the first rejection ofparticles is detected is delayed in 42 Nevertheless for theother cases analyzed (300 and 700 particles) such instantremains the same This suggests that increasing 119873 as anapproach for minimizing the sample impoverishment issueis a little efficient with a very high computational burdenas seen in Table 1 For PF the results were not conclusiveIt seems that the higher the number of particles the fastertheir impoverishment if nothing is done for avoiding sampleimpoverishment
As said before the number of particles is chosen as atrade-off between computational cost and estimation accu-racy The results in Table 3 present mean and standarddeviation of the errors in RNT components evaluated for119873 = 17 100 300 and 700 If only these statistics areanalyzed it is clear that the estimation accuracy improvesas the number of particles increases The largest standarddeviation occurred for PFPE (119873 = 17) In the along-trackcomponent a divergence occurrence in all algorithms (119873 =
17) was detected which can be verified by the high meanand standard deviation values obtained in the three casesSuch divergence disappears when119873 is increased When119873 =
700 the statistics and the errors behavior were very similarin the results obtained by PFR and PFPE versions By theinformation presented it is possible to conclude that if thenumber of particles is very small any sample impoverishmentavoidance procedure will not be effective Even more thePFPE approach as used here (particles edition executed only
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
3200
2800
2400
2000
1600
1200
800
400
0
minus400
PF with prior editing N = 17
Figure 2 Errors in RNT coordinates for PFPE simulation (119873 = 17)
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
60
30
0
minus30
minus60
minus90
minus120
PF with roughening N = 300
Figure 3 Errors in RNT coordinates for PFR simulation (119873 = 300)
once) does not present any significant improvement facingthe PFR procedure no matter the number of particles usedAnd taking into account the higher computational cost foronly one edition of particles if the PFPE is implemented asmany times as necessary the computation burden is enoughto contraindicate this procedure use even if the results areimproved
In order to show the behavior of the errors in termsof RNT coordinates Figures 2 3 and 4 are presentedFigure 2 shows the worst result the solution obtained forPFPE algorithm considering 119873 = 17 where the divergencein along-track coordinate is shown Figure 3 shows a PFRsolution for 119873 = 300 while Figure 4 presents the 119873 = 700
solution It was chosen to introduce PFR solutions becausethis is the algorithm with better performance during orbitdetermination process The errors decrease considerably inall implementations for 100 or more particles (see Table 3)
Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
33 Observations Model The nonlinear equation of theobservation model is
y119896= h119896(x119896 119905119896) + ^119896 (8)
where at instant 119905119896 y119896is the vector of119898 observations h
119896(x119896)
is the nonlinear function of state x119896 with dimension 119898
and ^119896is the observation errors vector with dimension 119898
and covariance R119896 For the present application the ion-free
pseudorange measurements from the Jason-2 GPS receiverare used Also the receiver clock offset was computedbefore and used to correct the pseudorange measurementsAdditionally the nonlinear pseudorange measurement wasmodelled according to [20]
4 Results
The tests and the analysis for the bootstrap particle filterand two procedures for avoiding sample impoverishment(roughening and prior editing) are presented To validateand to analyze the methods real GPS data from the Jason-2 satellite are used Ocean Surface Topography Mission(OSTM)Jason-2 is a follow-on altimetry mission to the verysuccessful TOPEXPoseidon mission and Jason-1 It is a jointmission between NASA and CNES (French space agency)launched June 20 2008 Jason-2 has a repeat period ofapproximately 10 days with 254 passes per cycle Its nodalperiod is 674572 sec (near 187 hours) Sometimes there maybe anomalous or missing data Occasionally Jason-2 mustperform maneuvers to maintain orbit When the satellitedetects something abnormal it will go into safe hold and willturn off all instruments and no data will be collected [21]
The filters estimated position and velocity are comparedwith Jason-2 precise orbit ephemeris (POE) from JPLNASAThe test conditions consider real ion-free pseudorange datacollected by the GPS receiver on-board Jason-2 on October22 2010 presenting up to 12 GPS satellites tracked The testswere limited to 55 hours of GPS data spaced 10 s After thatthere was an undesirable data gap which could spoil thetest case Such 55-hour arc (near 3 Jason-2 orbital periods)was considered sufficient for evaluating the bootstrap particlefilter and roughening and prior editing approaches in thisorbit determination application
The force model comprises perturbations due to geopo-tential up to order and degree 50 times 50 direct solar radiationpressure and Sun-Moon gravitational attraction This modelof forces is suitable for implementation in orbit determinationbecause of the low computational cost added comparedto the improvement in the results accuracy [22ndash24] Thepseudorange measurements were corrected to the first orderwith respect to ionosphere
This work is not a search for results accuracy It aimsat analyzing the application of a bootstrap filter to the orbitdetermination problem The analysis is based on comparingthe errors in position (translated to the orbital radial normaland along-track RNT components) among three solutions
(1) The bootstrap particle filter with resampling appliedwithout any sample impoverishment procedure(named ldquoPFrdquo in the results)
(2) The bootstrap particle filter applied with roughening(named ldquoPFRrdquo in the results)
(3) The bootstrap particle filter applied with rougheningand prior editing (named ldquoPFPErdquoin the results)
The RNT system interpretation is straightforward theradial component ldquoRrdquo points to the nadir direction the nor-mal ldquoNrdquo is perpendicular to orbital plane and the transversal(along-track) ldquoTrdquo is orthogonal to ldquoRrdquo and ldquoNrdquo and it isalso the velocity component Thus it is possible to analyzewhat happens with the orbital RNT components and theorbit evolution as well There is also interest for processingtime in order to analyze the computational efforts face to theaccuracy achieved by each algorithm
Regarding time of processing 119905CPU it was expected thatthe time required for the bootstrap particle filter algorithmwas increasing in two scenarios if the number of particlesrises and if roughening and prior editing were added to thealgorithm According to the estimator nature each elementof the state was replaced by an array of 119873 particles where119873 is a trade-off between computational cost and estimationaccuracy Here tests were done for 17 100 300 and 700particles
As said before prior editing recomputes any particle thatdoes not match a specific criterion Therefore a relevanttest is to observe the instant when each algorithm startsrejecting particles which will be presented The goal is toverify whether as a procedure is included it delays therejection process It will also be analyzedwhether the numberof particles affects the particle rejection that is whetherits increase may work as an approach for avoiding sampleimpoverishment
If 119873 is set (so the analysis is per line in Table 1) it isnoticeable that 119905CPU CPU time measured for PF and PFR isvery similar with a maximum 3 of difference However thealgorithm that includes prior editing PFPE is significantlymore costly reaching 39 of increase This was expectedfor PFPE because of the particles that do not pass theacceptance test and need to return to prior instant Regardingthe effects of increasing the number of particle for the samealgorithm (so the analysis is per column in Table 1) the raisein processing time was 83 from 17 to 100 particles 67from 100 to 300 and 59 from 300 to 700 Considering thatfor 17 100 300 and 700 particles the increase in 119873 is 6 3and 23 times respectively then 119905CPU increase is not directlyproportional to the number of particles used Therefore theCPU time and the increase in the number of particles showthat the time of processing is related to the chosen numberof particles only when the number of particles changes but ithas no relation with the estimator implemented
For computing time of processing and for all the simu-lations shown a computer Intel Core i5-2430M processor of240GHz with 270GB of RAM was used The program wascoded in FORTRAN 77 within operating system WindowsXP and compiler Compaq Visual Fortran version 61
When some particles do not reach prior editing criterion(ie the magnitude of 120592
119896119894is higher than six standard
deviation of the measurement noise) they need to be editedin the prior instant of timeThe first instant when any particle
6 Mathematical Problems in Engineering
Table 1 Time of processing
119873 PF PFR PFPE
119905CPU
17 44 s 45 s 1min 23 s100 4min 16 s 4min 19 s 7min 07 s300 12min 49 s 13min 05 s 20min 56 s700 31min 09 s 31min 27 s 50min 31 s
Table 2 Instant of the first rejection of particles occurrence
119873 PF PFR PFPE
119905PE
17 16min 00 s 26min 40 s 26min 40 s100 10min 00 s 45min 50 s 45min 50 s300 9min 20 s 45min 50 s 45min 50 s700 9min 00 s 45min 50 s 45min 50 s
needed to be edited 119905PE was computed for each algorithmand119873 as can be verified in Table 2
In Table 2 the rejection of particles was first detectedin the PF algorithm despite the number of particles usedThis was expected since no procedure in order to combatthe number of truly distinct samples reduction was usedin this algorithm And the instant when the first rejectionoccurred in PFR and PFPE concurred for all changing inthe number of particles This is considerably consistentsince prior editing procedure depends first on rougheningimplementation Regarding the increase in the number ofparticles (from 17 to 100) it is noticeable that when proce-dures for avoiding sample impoverishment are adopted (inPFR and PFPE cases) the instant when the first rejection ofparticles is detected is delayed in 42 Nevertheless for theother cases analyzed (300 and 700 particles) such instantremains the same This suggests that increasing 119873 as anapproach for minimizing the sample impoverishment issueis a little efficient with a very high computational burdenas seen in Table 1 For PF the results were not conclusiveIt seems that the higher the number of particles the fastertheir impoverishment if nothing is done for avoiding sampleimpoverishment
As said before the number of particles is chosen as atrade-off between computational cost and estimation accu-racy The results in Table 3 present mean and standarddeviation of the errors in RNT components evaluated for119873 = 17 100 300 and 700 If only these statistics areanalyzed it is clear that the estimation accuracy improvesas the number of particles increases The largest standarddeviation occurred for PFPE (119873 = 17) In the along-trackcomponent a divergence occurrence in all algorithms (119873 =
17) was detected which can be verified by the high meanand standard deviation values obtained in the three casesSuch divergence disappears when119873 is increased When119873 =
700 the statistics and the errors behavior were very similarin the results obtained by PFR and PFPE versions By theinformation presented it is possible to conclude that if thenumber of particles is very small any sample impoverishmentavoidance procedure will not be effective Even more thePFPE approach as used here (particles edition executed only
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
3200
2800
2400
2000
1600
1200
800
400
0
minus400
PF with prior editing N = 17
Figure 2 Errors in RNT coordinates for PFPE simulation (119873 = 17)
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
60
30
0
minus30
minus60
minus90
minus120
PF with roughening N = 300
Figure 3 Errors in RNT coordinates for PFR simulation (119873 = 300)
once) does not present any significant improvement facingthe PFR procedure no matter the number of particles usedAnd taking into account the higher computational cost foronly one edition of particles if the PFPE is implemented asmany times as necessary the computation burden is enoughto contraindicate this procedure use even if the results areimproved
In order to show the behavior of the errors in termsof RNT coordinates Figures 2 3 and 4 are presentedFigure 2 shows the worst result the solution obtained forPFPE algorithm considering 119873 = 17 where the divergencein along-track coordinate is shown Figure 3 shows a PFRsolution for 119873 = 300 while Figure 4 presents the 119873 = 700
solution It was chosen to introduce PFR solutions becausethis is the algorithm with better performance during orbitdetermination process The errors decrease considerably inall implementations for 100 or more particles (see Table 3)
Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Table 1 Time of processing
119873 PF PFR PFPE
119905CPU
17 44 s 45 s 1min 23 s100 4min 16 s 4min 19 s 7min 07 s300 12min 49 s 13min 05 s 20min 56 s700 31min 09 s 31min 27 s 50min 31 s
Table 2 Instant of the first rejection of particles occurrence
119873 PF PFR PFPE
119905PE
17 16min 00 s 26min 40 s 26min 40 s100 10min 00 s 45min 50 s 45min 50 s300 9min 20 s 45min 50 s 45min 50 s700 9min 00 s 45min 50 s 45min 50 s
needed to be edited 119905PE was computed for each algorithmand119873 as can be verified in Table 2
In Table 2 the rejection of particles was first detectedin the PF algorithm despite the number of particles usedThis was expected since no procedure in order to combatthe number of truly distinct samples reduction was usedin this algorithm And the instant when the first rejectionoccurred in PFR and PFPE concurred for all changing inthe number of particles This is considerably consistentsince prior editing procedure depends first on rougheningimplementation Regarding the increase in the number ofparticles (from 17 to 100) it is noticeable that when proce-dures for avoiding sample impoverishment are adopted (inPFR and PFPE cases) the instant when the first rejection ofparticles is detected is delayed in 42 Nevertheless for theother cases analyzed (300 and 700 particles) such instantremains the same This suggests that increasing 119873 as anapproach for minimizing the sample impoverishment issueis a little efficient with a very high computational burdenas seen in Table 1 For PF the results were not conclusiveIt seems that the higher the number of particles the fastertheir impoverishment if nothing is done for avoiding sampleimpoverishment
As said before the number of particles is chosen as atrade-off between computational cost and estimation accu-racy The results in Table 3 present mean and standarddeviation of the errors in RNT components evaluated for119873 = 17 100 300 and 700 If only these statistics areanalyzed it is clear that the estimation accuracy improvesas the number of particles increases The largest standarddeviation occurred for PFPE (119873 = 17) In the along-trackcomponent a divergence occurrence in all algorithms (119873 =
17) was detected which can be verified by the high meanand standard deviation values obtained in the three casesSuch divergence disappears when119873 is increased When119873 =
700 the statistics and the errors behavior were very similarin the results obtained by PFR and PFPE versions By theinformation presented it is possible to conclude that if thenumber of particles is very small any sample impoverishmentavoidance procedure will not be effective Even more thePFPE approach as used here (particles edition executed only
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
3200
2800
2400
2000
1600
1200
800
400
0
minus400
PF with prior editing N = 17
Figure 2 Errors in RNT coordinates for PFPE simulation (119873 = 17)
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
60
30
0
minus30
minus60
minus90
minus120
PF with roughening N = 300
Figure 3 Errors in RNT coordinates for PFR simulation (119873 = 300)
once) does not present any significant improvement facingthe PFR procedure no matter the number of particles usedAnd taking into account the higher computational cost foronly one edition of particles if the PFPE is implemented asmany times as necessary the computation burden is enoughto contraindicate this procedure use even if the results areimproved
In order to show the behavior of the errors in termsof RNT coordinates Figures 2 3 and 4 are presentedFigure 2 shows the worst result the solution obtained forPFPE algorithm considering 119873 = 17 where the divergencein along-track coordinate is shown Figure 3 shows a PFRsolution for 119873 = 300 while Figure 4 presents the 119873 = 700
solution It was chosen to introduce PFR solutions becausethis is the algorithm with better performance during orbitdetermination process The errors decrease considerably inall implementations for 100 or more particles (see Table 3)
Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 3 Mean and standard deviation statistics
Estimator 119873Mean plusmn standard deviation (m)
R N T
PF
17 minus5940 plusmn 36276 minus1821 plusmn 17869 120504 plusmn 212955100 minus10289 plusmn 14711 minus0238 plusmn 9961 94695 plusmn 119586300 minus1065 plusmn 9367 0139 plusmn 7333 minus9177 plusmn 50723700 minus1031 plusmn 8089 0038 plusmn 7047 minus1792 plusmn 34949
PFR
17 27666 plusmn 64094 6011 plusmn 31725 37537 plusmn 343973100 minus6876 plusmn 19706 minus2935 plusmn 12435 2562 plusmn 11078300 minus6105 plusmn 16806 minus2335 plusmn 5478 1066 plusmn 6198700 minus5246 plusmn 12361 minus1322 plusmn 4574 minus0051 plusmn 3486
PFPE
17 minus101686 plusmn 63379 minus1322 plusmn 75400 1394298 plusmn 902146100 minus9833 plusmn 15272 minus1813 plusmn 7972 1290 plusmn 9093300 minus5839 plusmn 15008 minus1890 plusmn 7615 0602 plusmn 3953700 minus5250 plusmn 12675 minus1669 plusmn 4164 minus0243 plusmn 4043
0 1 2 3 4 5 6
Erro
r (m
)
Time (h)
RNT
50
25
0
minus25
minus50
minus75
PF with roughening N = 700
Figure 4 Errors in RNT coordinates for PFR simulation (119873 = 700)
despite an incongruous behavior close to 1 and 5 hours ofprocessing from which the filters recover later This anoma-lous behavior is detected in all simulations results In thegraphics blue curves correspond to radial component (R)red to normal (N) and green to along-track (T) Increasing119873 from 300 to 700 was more meaningful to along-trackcomponent as its mean and standard deviation had higherimprovement (decreasing in values) and less significant tonormal coordinate
According to Figures 3 and 4 the results for 119873 = 300
are as competitive as for 119873 = 700 And if computationalburden of implementing 700 particles is taken into account300 particles are sufficient for the evaluation proposed in thispaper
Despite the undesirable data gap near 55 hours of GPSdata in order to properly evaluate the fittest algorithm(PFR) regarding number of particles two other graphicswere generated Figures 5 and 6 present Δ119903 and ΔV the
0 4 8 12 16 20 24Time (h)
10E + 04
10E + 03
10E + 02
10E + 01
10E + 00
10E minus 01
Δr
(m)
N = 300
N = 17
Figure 5 Δ119903 (m) obtained in the PFR simulation
0 4 8 12 16 20 24Time (h)
10E + 01
10E + 00
10E minus 01
10E minus 02
10E minus 03
10E minus 04
Δ
(ms
)
N = 300
N = 17
Figure 6 ΔV (ms) obtained in the PFR simulation
errors in position and velocity respectively for 24 hours ofimplementation The results obtained for 119873 = 300 (greencurves) are compared with 119873 = 17 (dark blue curves)According to the results it is clear that a higher number ofparticles are important for improving the results since theamplitude of errors diminished considerably when 119873 = 300
8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
was used And despite the troublesome data for 300 particlescase PFR can recover and continue the estimation processwithout divergence which is an indication of the particle filterrobustness In each figure Δ119903 and ΔV represent respectivelythe absolute value of the errors in position and in velocityin the ECEF (Earth-Centered Earth-Fixed) reference framealso known as ECR (Earth-Centered Rotational)
5 Conclusions
A Bayesian bootstrap particle filter was applied for the satel-lite orbit determination problem using a set of GPSmeasure-ments The development was evaluated taking into accountperformance and computational burden The bootstrap filterresults implemented with resampling were compared withtwo other versions which include roughening and priorediting aiming at avoiding sample impoverishment
With regard to time of processing results showed thatPFPE algorithm requires greater time than PF which is ascompetitive as PFR Since the number of particles is chosenas a trade-off between computational cost and estimationaccuracy the CPU time is related to the variation in numberof particles chosen
When the number of particles used is analyzed it isalso possible to conclude that if it is very small any sampleimpoverishment avoidance procedure will not be effectualAnd since PFPE approach executes particles edition onlyonce here it does not present any significant improvementfacing the PFR procedure no matter the number of particlesused Additionally if the computational costs between PFRand PFPE (as implemented) are compared the computationburden is enough to contraindicate PFPE implementation asmany times as necessary even if the results are improved
Results confirm that the greater the number of particlesthe better the estimation accuracy The best result wasachieved for119873 = 700 in the three versions of the estimatoralthough a higher computational effort was demanded in thiscase Therefore when results are compared it is possible toassure that 300 particles are enough to achieve the accuracylevel aimed in this paper
In order to obtain a better bootstrap particle filterperformance especially in terms of estimation accuracyadjustments in the many filter variants might be done forimproving its efficiency Such adjustments are directly relatedto the knowledge about the filter Other strategies can alsobe tried for solving implementation issues such as sampleimpoverishment Another approach for improving particlefiltering is to combine it with another filter such as extendedKalman filter or unscented Kalman filter In this approacheach particle is updated at the measurement time using theextended or the unscented filter and then resampling isperformed using the measurements
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors wish to express their consideration to theNational Institute for Space Research (INPE) that kindlyprovided everything necessary for this paper to be devel-oped The authors are also grateful to Sao Paulo ResearchFoundation (FAPESP) for the support under Contract no201221023-6 and to National Council for Scientific andTechnological Development (CNPq) for the support underContract no 3031192010-1
References
[1] N J Gordon D J Salmond and A F M Smith ldquoNovelapproach to nonlinearnon-gaussian Bayesian state estimationrdquoIEE Proceedings Part F Radar and Signal Processing vol 140no 2 pp 107ndash113 1993
[2] D Simon Optimal State Estimation Wiley-InterscienceJohnWiley amp Sons Hoboken NJ USA 2006
[3] A Doucet N de Freitas andN Gordon Eds SequentialMonteCarlo Methods in Practice Springer New York NY USA 2001
[4] U Orguner and F Gustafsson ldquoRisk-sensitive particle filtersfor mitigating sample impoverishmentrdquo IEEE Transactions onSignal Processing vol 56 no 10 pp 5001ndash5012 2008
[5] S Park J P Hwang E Kim and H-J Kang ldquoA new evolution-ary particle filter for the prevention of sample impoverishmentrdquoIEEE Transactions on Evolutionary Computation vol 13 no 4pp 801ndash809 2009
[6] N M Kwok G Fang and W Zhou ldquoEvolutionary particlefilter re-sampling from the genetic algorithm perspectiverdquo inIEEE IRSRSJ International Conference on Intelligent Robots andSystems (IROS rsquo05) pp 2935ndash2940 IEEE August 2005
[7] T Li T P Sattar and S Sun ldquoDeterministic resamplingunbiased sampling to avoid sample impoverishment in particlefiltersrdquo Signal Processing vol 92 no 7 pp 1637ndash1645 2012
[8] F Daum and J Huang ldquoParticle degeneracy root cause andsolutionrdquo in Signal Processing Sensor Fusion and Target Recog-nition XX vol 8050 of Proceedings of SPIE Orlando Fla USAApril 2011
[9] H Driessen and Y Boers ldquoEfficient particle filter for jumpMarkov nonlinear systemsrdquo IEE ProceedingsmdashRadar Sonar andNavigation vol 152 no 5 pp 323ndash326 2005
[10] P C P M Pardal H K Kuga and R V Moraes ldquoOrbitDetermination Using Nonlinear Particle Filter and GPS Mea-surementsrdquo in Proceedings of the AASAIAA AstrodynamicsSpecialist Conference vol 150 of Advances in the AstronauticalSciences pp 1077ndash1092 August 2014
[11] P S Maybeck Stochastic Models Estimation and Control vol2 Academic Press New York NY USA 1982
[12] R G Brown and P Y C Hwang ldquoA Kalman filter approach toprecision GPS geodesyrdquo Navigation vol 30 no 4 pp 338ndash3491983
[13] O Montenbruck and E Gill Satellite Orbits Models Methodsand Applications Springer Berlin Germany 2001
[14] P C P M Pardal H K Kuga and R Vilhena de Moraes ldquoNonlinear sigma point kalman filter applied to orbit determinationusing GPS measurementsrdquo in Proceedings of the 22nd Interna-tional Technical Meeting of the Satellite Division of the Instituteof Navigation (ION GNSS 2009) pp 2301ndash2308 Savannah GaUSA September 2009
Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[15] W M Kaula Theory of Satellite Geodesy Blasdell WalthmamMass USA 1966
[16] PW Binning ldquoGPS dual frequency SA free satellite navigationNavigation technology for the 3rd millenniumrdquo in Proceedingsof the 52nd Annual Meeting of the Institute of Navigation pp803ndash812 Cambridge Mass USA June 1996
[17] J A Marshall and S B Luthcke ldquoModeling radiation forcesacting on TopexPoseidon for precision orbit determinationrdquoJournal of Spacecraft and Rockets vol 31 no 1 pp 99ndash105 1994
[18] A F B A Prado and H K Kuga Eds Fundamentos deTecnologia Espacial INPE Sao Jose dos Campos Brazil 2001
[19] T Guan Special cases of the three body problem httpinsideminesedufs hometohnoteachingPH505 2011Paper Tianyu-anGuanpdf
[20] A P M Chiaradia H K Kuga and A F B A Prado ldquoSinglefrequency GPS measurements in real-time artificial satelliteorbit determinationrdquo Acta Astronautica vol 53 no 2 pp 123ndash133 2003
[21] ldquoOSTMJason-2 Products Handbookrdquo 2009 ftppodaacjplnasagovallDataostmpreviewL2GPS-OGDRdocsuserhand-bookpdf
[22] P C P M Pardal H K Kuga and R V deMoraes ldquoComparingthe extended and the sigma point kalman filters for orbit deter-mination modeling using GPS measurementsrdquo in Proceedingsof the 23rd International Meeting of the Satellite Division of theInstitute of Navigation (ION GNSS rsquo10) Portland Ore USASeptember 2010
[23] P C P M Pardal H K Kuga and R Vilhena de MoraesldquoUnscented Kalman filter robustness assessment for orbit deter-mination using GPS signalsrdquo Advances in the AstronauticalSciences vol 148 pp 117ndash134 2013
[24] P C P M Pardal H K Kuga and R V de Moraes ldquoAnalyzingthe unscented kalman filter robustness for orbit determinationthrough global positioning system signalsrdquo Journal of AerospaceTechnology and Management vol 5 no 4 pp 395ndash408 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of









![Orbit type: Sun Synchronous Orbit ] Orbit height: …...Orbit type: Sun Synchronous Orbit ] PSLV - C37 Orbit height: 505km Orbit inclination: 97.46 degree Orbit period: 94.72 min ISL](https://img.pdfslide.us/doc/110x75/5f781053e671b364921403bc/orbit-type-sun-synchronous-orbit-orbit-height-orbit-type-sun-synchronous.jpg)