-
Kolonay 1
CRD
Computational AeroelasticityThe Cultural and Convention
Center
METUInonu bulvari
Ankara, Turkey
Sponsored by:RTA-NATO
The Applied Vehicle Technology Panel
presented byR.M. Kolonay Ph.D.
General Electric Corporate Research & Development
CenterAnkara, Turkey Oct.. 1-5, 2001
-
Kolonay 2
CRD
Introduction- Fluid-Structure Interactions
Aeroelasticity- Aeroelastic analysis/design in an MDA/MDO
Environment
Static Aeroelasticity
Dynamic Aeroelasticity
Commercial Programs with Aeroelastic
Analysis/DesignCapabilities
Presentation Outline
-
Kolonay 3
CRD
Dynamic Aeroelastic Phenomena
Dynamic Response
Limit Cycle Oscillations (LCO)
Buffet
Flutter
Dynamic Aeroelasticity
Solutions found in time, frequency, and Laplace domain
usuallywith generalized coordinates
-
Kolonay 4
CRD Dynamic Aeroelasticity
Dynamic Response
Transient response due to a rapidly applied load.
Atmospheric Turbulence- Continuous random- Discrete random
(gust)
Landing loads Snap maneuvers Store Separation
-
Kolonay 5
CRD Dynamic Aeroelasticity
Limit Cycle Oscillations
Typically caused by shock induced oscillations on a surface or
flow/shocks attaching/detaching from a surface trailing edge.
Panel Flutter Control Surface Buzz Store/Wing configurations
Reduces structural life
Usually requires nonlinear flow conditions and possibly
nonlinearstructures (cs hinge stiffness)
-
Kolonay 6
CRD Dynamic Aeroelasticity
BuffetResponse due to time-dependent separated flows (usually
vortical)impinging on structural surfaces.
Bluffed bodies on horizontal and vertical surfaces Wings,
strakes etc.. on vertical tails (often a twin tail prob-
lem)
Reduces structural life
Requires nonlinear aerodynamics to capture phenomena
-
Kolonay 7
CRD Dynamic Aeroelasticity
Flutter
Dynamic instability where-by the system extracts energy from
thefree stream flow producing a divergent response.
Usually resultant of coupling of 2 or more structural modes-
Wing bending and torsion- Wing bending control surface hinge
torsion- Wing torsion fuselage bending- Horizontal or vertical tail
and fuselage
Divergent behavior can occur within a few cycles and be
cata-strophicTheodore Von Karman is said to have remarked that
some men fear flutter because they do not understand it,
whileothers fear it because they do[8]
-
Kolonay 8
CRD
M
o
t
i
o
n
M
o
t
i
o
n
M
o
t
i
o
n
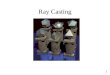
Stable (A)
Neutral (B)
Unstable (C)F
r
e
q
u
e
n
c
y
A
BC
Torsion Mode
Bending Mode
Dynamic Aeroelasticity
FlutterTime Histories
Modal Coupling
Dynamic Pressure
-
Kolonay 9
CRD Dynamic Aeroelasticity
From ro(20)
let(21)
Whe rEq. ( b
(22)For s so
(23)
)
B+
u
(23) s lem the ae
re20) can
tability
F t(
Mu
M
can beFlutterelastic EOM
epresents motion independent external forcese written as
lve the homogenous equation from some initial state.
Mu Ku+ F u u u t, , ,( )=
F u u u t, , ,( ) F u u u, ,( ) F t( )+=
u Ku+ Q1[ ] u Q2[ ]u Q3[ ]u F t( )+ + +=
Bu Ku+ + Q1[ ] u Q2[ ]u Q3[ ]u+ +=
olved by time integration or as an eigenvalue prob
-
Kolonay 10
CRD
Tran (2unst ero
(24)Assu at us
(25)With in nto(24)
(26)
hh
hh
Dynamic Aeroelasticitysformeady a
me th
gives
M
qh{ }
MEigenvalue Solutions3) to modal coordinates and assume that
thedynamics depend only on displacements
the structural response is separable and synchrono
dependent of time and .Substituting i
uh{ }
uh Buh
Khhuh12---V
2 Qhh[ ]uh+ + 0=
uh{ } qh{ }est
=
s i+=
s2 Bhhs Khh
12---V
2Qhh+ + qh{ } 0=
-
Kolonay 11
CRD
6 a ff-
ma ts
co
- GOft
Do
al
Sta
KKPP
Dynamic AeroelasticityEq. (2 All m
ness
to be
-
phase-
Sever-
-
-
-
-
Qhh) is the basic flutter eigenvalue equationtrices can be
expressed as real but the aeroelastic sti
trix is unsymmetric causing roo
mplex conjugate pairs.eneralized unsteady aerodynamic forces
en assumed harmonic cast in frequency domain with amplitude
and
ublet Lattice, CPM, Mach Box, Strip Theory
solutions exist for solving (26)Method
Method Method
Methodte space
Khh12---V
2Qhh
EK
-
Kolonay 12
CRD
can pr
7)
- sel trea
- ref i-chplex
, gene
-
- free sity
- redu ncy
- eig f m
- dam
s
2
V
bp k (Mhh B
QhhI ]=
k
qhi 1
Dynamic Aeroelasticity be ex
ected frees
erence sem - com
,
stream den
ced freque
envector o
ping factor
Vb----
2p
i+ )hh Khh
QR iQ+[P-K Flutter Solutionessed as . (26) becomes
(2
m speed
ord response frequency and eigenvalueralized mass, damping,
stiffness matrices
generalized aerodynamic matrix
,
odal coordinates
sVkb------ i+( )
Vb---- p= =
MhhVb---- pBhh Khh
V2
2----------Q k( )hh+ + qh 0=
k bV-------=
-
Kolonay 13
CRD
P-K Method Comments
Matrices are real but non-symmetric yielding complex roots.
Flutter equation only true when , an estimate elsewhere Mode
switching often occurs making results interpretation difficult
depends on Mach number and reduced frequency
Solution requires to be a continuous function of .
- Results in curve fitting which can cause errors
Above formulation does not allow User responsible for
determining match point solutions
0=
Qhh Qhh M k,( )
Qhh kQhh
k 0=
Dynamic Aeroelasticity
-
Kolonay 14
CRD
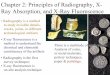
AGARD 445.6 Flutter Calculations
X
Y
Z
31.38
27.48
23.57
19.67
15.77
11.86
7.958
4.055
.1511
-3.753
-7.656
-11.56
-15.46
-19.37
-23.27
-27.17
X
Y
ZX
YZ
X
YZ
Dynamic Aeroelasticity
X
Y
Z
71.52
65.25
58.97
52.69
46.42
40.14
33.87
27.59
21.31
15.04
8.761
2.485
-3.791
-10.07
-16.34
-22.62
X
Y
ZX
YZ
X
YZ
Mode 4, = 89.94 Hz.
X
Y
Z
25.09
20.38
15.68
10.97
6.269
1.565
-3.139
-7.843
-12.55
-17.25
-21.96
-26.66
-31.36
-36.07
-40.77
-45.48
X
Y
ZX
YZ
X
YZ
Mode 2, = 37.12 Hz.
X
Y
Z
27.92
26.05
24.19
22.32
20.45
18.59
16.72
14.85
12.98
11.12
9.250
7.383
5.516
3.649
1.782
-.08551
X
Y
ZX
YZ
X
YZ
Mode Shapes and frequencies
Mode 3, = 50.50 Hz.Mode 1, = 9.63 Hz.
-
Kolonay 15
CRD Dynamic Aeroelasticity
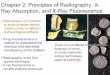
AGARD 445.6 Time Integration Response
0.0 0.1 0.2 0.3 0.4
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= 13.06821= 88.352(Hz)2= 5.94082= 52.285(Hz)3= 24.10023=
30.268(Hz)4= .16874= 15.574(Hz)
DATAFITERROR
0.0 0.1 0.2 0.3 0.4
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= -.03661= 15.561(Hz)2= 32.09162= 30.286(Hz)3= 445.60373=
.612(Hz)4= 4.77384= 52.054(Hz)
DATAFITERROR
0.0 0.1 0.2 0.3 0.4
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= 5.76351= 52.269(Hz)2= 25.91592= 30.188(Hz)3= .03963=
15.564(Hz)4= 12.46104= 88.338(Hz)
DATAFITERROR
0.0 0.1 0.2 0.3 0.4
-0.0040
-0.0030
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
0.0040
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= .02821= 15.569(Hz)2= 25.87332= 30.095(Hz)3= 5.76883=
52.242(Hz)4= 12.07914= 88.547(Hz)
DATAFITERROR
Mode 1 Mode 3
Mode 2 Mode 4
M 0.901 q, 0.66psi U, 11908 in/sec= = =
-
Kolonay 16
CRD Dynamic Aeroelasticity
AGARD 445.6 Time Response Integration
0.0 0.1 0.2 0.3 0.4
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= 5.76351= 52.269(Hz)2= 25.91592= 30.188(Hz)3= .03963=
15.564(Hz)4= 12.46104= 88.338(Hz)
DATAFITERROR
0.0 0.1 0.2 0.3 0.4
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= 13.06821= 88.352(Hz)2= 5.94082= 52.285(Hz)3= 24.10023=
30.268(Hz)4= .16874= 15.574(Hz)
DATAFITERROR
0.0 0.1 0.2 0.3 0.4
-0.0040
-0.0030
-0.0020
-0.0010
0.0000
0.0010
0.0020
0.0030
0.0040
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= .02821= 15.569(Hz)2= 25.87332= 30.095(Hz)3= 5.76883=
52.242(Hz)4= 12.07914= 88.547(Hz)
DATAFITERROR
0.0 0.1 0.2 0.3 0.4
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
Time (sec)
G
e
n
e
r
a
l
i
z
e
d
D
i
s
p
l
a
c
e
m
e
n
t
1= -.03661= 15.561(Hz)2= 32.09162= 30.286(Hz)3= 445.60373=
.612(Hz)4= 4.77384= 52.054(Hz)
DATAFITERROR
M 0.901 q, 0.67psi U, 11998 in/sec= = =
Mode 1
Mode 4Mode 2
Mode 3Vf = 11,971 in/sec
rad f 90=
-
Kolonay 17
CRD
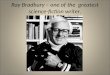
AGARD 445.6 P-K Flutter Solution
6000 8000 10000 12000 14000
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
MODE 1MODE 2MODE 3MODE 4
Dynamic Aeroelasticity
D
a
m
p
i
n
g
r
a
t
i
o
(
g
)
Velocity (V in/sec)
Velocity vs. Damping
Vf =1181 in/sec
-
Kolonay 18
CRD
AGARD 445.6 P-K Flutter Solution
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2
100
200
300
400
500
MODE 1MODE 2MODE 3MODE 4
445.6 Wing Damping Ratio versus Frequency
(M= .901, = 0.00, = 9.307E-09 slugs/ in )
Dynamic Aeroelasticity
F
r
e
q
u
e
n
c
y
(
r
a
d
i
a
n
s
)
Damping ratio (g)
Velocity Root Locus
rad f 96=
-
Kolonay 19
CRD Dynamic Aeroelasticity
AGARD 445.6 P-K Flutter Solution
6000 8000 10000 12000 14000
100
200
300
400
500
MODE 1MODE 2MODE 3MODE 4
Velocity vs. FrequencyF
r
e
q
u
e
n
c
y
(
r
a
d
i
a
n
s
)
Velocity (V in/sec)
-
Kolonay 20
CRD Aeroelastic Software
Global Aeroelastic Software Developments MSC/NASTRAN (U.S.)
UAI/ASTROS (recently bought by MSC) (U.S.) UAI/NASTRAN (U.S.)
ELFINI (France, Dessault) LAGRANGE (Germany, formerly MBB) STARS
(Great Britain, RAE) OPTSYS (Sweden, SAAB) COMPASS (China) ARGON
(Russia, Central Aerohydrodynamic Institute)
-
Kolonay 21
CRD Aeroelastic Software
y Sub
Sup
adSub
SupStead-
-
Unste-
- MSC/NASTRANAerodynamicssonicDoublet Lattice (k=0)3-D panel
Method (available in the near future)Bypass option for any
AICersonicZONA51Bypass option for any AICAerodynamic
databaseImport/export loads data
y AerodynamicsonicDoublet Lattice with body interferenceStrip
TheoryersonicMach Box
-
Kolonay 22
CRD
turVer
A5 DFleCom esAbDivSleMuAerImpStruc-
Static-
-
-
-
-
-
-
-
- Piston TheoryZONA51
al Modelingy rich selection of FE
eroelastic AnalysisOF trim (no drag/thrust trim)xible increment
analysis
putes rigid, restrained and unrestrained flexible stability
derivativle to add experimental load correction factors to
AICergence of restrained vehiclender body modelsltiple set
selectable aerodynamic modelsoelastic databaseort/export loads
data
Aeroelastic Software
-
Kolonay 23
CRD
mFreRanTraGuFlu
nteInfiThiFinBeaRig
osExt envi-nt
QDyna-
-
-
-
-
-
F-S I-
-
-
-
-
Pre-P-
ronmeic Aeroelasticityquency response analysisdom analysis
nsient analysisst (random and discrete 1-d)tter P-K, K, K-E (K-E
allows k=0)
curve fits cubic through all points
rfacenite plate splinen plate splineite plate splinem splineid
load Transfer
t Processingensive Flight Loads pre/post processing
functionality in PATRAN
M k,( )
Aeroelastic Software
-
Kolonay 24
CRD Aeroelastic Software
/A y A
ub
up
adub
upUAIStead
- S
- S
Unste- S
- SSTROS Aeroelastic Capabilitieserodynamics
sonicUSSAERO (Woodward Aerodynamics, flat panel)QUADPAN
(Lockheed Martin, 3-D panel)Bypass option for any AICMultiple set
selectable aerodynamic models
ersonicUSSAERO (flat panel)QUADPAN (3-D panel)Bypass option for
any AIC
y AerodynamicsonicDoublet LatticeersonicConstant Pressure Method
(Apa, Northrop)
-
Kolonay 25
CRD
turMe s,
AFulComUseTrim
mGuFluSev
nteInfiStruc-
Static-
-
-
-
Dyna-
-
-
F-S I- al Modelingmbrane type FEM (Rods, Beams, Shear panels,
Quadrilateral PlateComposites)
eroelastic Analysisl 6 DOF Trim
putes rigid and four types of flexible stability derivativesr
defined loads Optimization
ic Aeroelasticityst Responsetter P-K (computes flutter
velocity)eral choices for curve fits
rfacenite Plate spline
Q M k,( )
Aeroelastic Software
-
Kolonay 26
CRD
3-DBeaRig
ea sys--
-
-
Very tem surface splinem splineid load Transfer
sy to add user defined functionality and tailor the
Aeroelastic Software
-
Kolonay 27
CRD
1. Bis f, A -Wes-ley Pu Co2. We Fu sitySchoo ona3. Sm nd ry
toAircra ture4. Nei HeASTR ore5. Ben Od ateAeroe mu Flow-Induc
tio6. Far Sp ber1995.7. Ma . H il,1971.8. I.E. an nal ofAircra
18,
Referencesshley and Halfman Aeroelasticity, Dover Publications,
Addisonmpany, Inc., 1995.ndamentals of Static and Dynamic
Aeroelasticity, Purdue Univerutics and Astronautics, West
Lafayette, IN 1992.
Wasserman, L. S., Application of Three Dimensional Flutter
Theos, USAAF TR 4798, 1942.
rendeen, D.L., Venkayya, V.B., ASTROS Enhancements, Vol
III-tical Manual, WL-TR-95-3006.dvar O., Fluid-Structure Coupling
Requirements for Time-Accurlations, AD-Vol.53-3, Fluid-Structure
Interaction, Aeroelasticity,n and Noise, Volume III ASME,
1997.ecial course on Parallel Computing in CFD, AGARD-R807,
Octo
., The NASTRAN Theoretical Manual, NASA-SP-221(01), Apr
d W.H. Reed, III Historical Development of Aircraft Flutter,
Jour No. 11, November 1981.plinghofblishingisshaar, l of Aerilg, B.
aft Strucll, D.J., OS Thediksen, lastic Sied Vibrahat, C.,
cNeal, R
Garrickft, Vol.
-
Kolonay 28
CRD
9. Gru er ngthAnaly pt n,,AFFD 5-110. Ha J., byDeterm tera
-889.11. Ne , M ndlerCorpo 15mman Asis and OL-TR-7ssig, H.inant
I
ill, D.J.ration, 8ospace Corporation, An Automated Procedure for
Flutter and Streimization of Aerospace Vehicles Volume I. Theory
and Applicatio37.An Approximate True Damping Solution of the
Flutter Equation tion, Journal of Aircraft, Vol. 8, No. 11,
November 1971, pp. 885SC/Flight Loads and Dynamics Training,, The
MacNeal-Schwe
Colorado Boulevard, Los Angeles, CA, August 1999.
References
Computational AeroelasticityThe Cultural and Convention
CenterMETUInonu bulvariAnkara, TurkeySponsored by:RTA-NATOThe
Applied Vehicle Technology Panelpresented byR.M. Kolonay
Ph.D.General Electric Corporate Research & Development
CenterAnkara, Turkey Oct.. 1-5, 2001 Introduction- Fluid-Structure
Interactions Aeroelasticity- Aeroelastic analysis/design in an
MDA/MDO Environment
Static Aeroelasticity Dynamic Aeroelasticity Commercial Programs
with Aeroelastic Analysis/Design Capabilities
Presentation OutlineReferences1. Bisplinghoff, Ashley and
Halfman Aeroelasticity, Dover Publications, Addison-Wesley
Publishi...2. Weisshaar, Fundamentals of Static and Dynamic
Aeroelasticity, Purdue University School of Ae...3. Smilg, B. and
Wasserman, L. S., Application of Three Dimensional Flutter Theory
to Aircraft S...4. Neill, D.J., Herendeen, D.L., Venkayya, V.B.,
ASTROS Enhancements, Vol III- ASTROS Theoretica...5. Bendiksen,
Oddvar O., Fluid-Structure Coupling Requirements for Time-Accurate
Aeroelastic Sim...6. Farhat, C., Special course on Parallel
Computing in CFD, AGARD-R807, October 1995.7. MacNeal, R. H., The
NASTRAN Theoretical Manual, NASA-SP-221(01), April, 1971.8. I.E.
Garrick and W.H. Reed, III Historical Development of Aircraft
Flutter, Journal of Aircr...9. Grumman Aerospace Corporation, An
Automated Procedure for Flutter and Strength Analysis and O...10.
Hassig, H.J., An Approximate True Damping Solution of the Flutter
Equation by Determinant It...11. Neill, D.J., MSC/Flight Loads and
Dynamics Training,, The MacNeal-Schwendler Corporation, 8...
ReferencesDynamic Aeroelastic Phenomena Dynamic Response Limit
Cycle Oscillations (LCO) Buffet Flutter
Dynamic AeroelasticityFlutter
Dynamic AeroelasticityDynamic AeroelasticityDynamic
ResponseTransient response due to a rapidly applied load.
Atmospheric Turbulence- Continuous random- Discrete random
(gust)
Landing loads Snap maneuvers Store Separation
Dynamic AeroelasticityLimit Cycle OscillationsTypically caused
by shock induced oscillations on a surface or flow/ shocks
attaching/detaching f... Panel Flutter Control Surface Buzz
Store/Wing configurationsReduces structural lifeSolutions found in
time, frequency, and Laplace domain usually with generalized
coordinatesUsually requires nonlinear flow conditions and possibly
nonlinear structures (cs hinge stiffness)
Dynamic AeroelasticityBuffetResponse due to time-dependent
separated flows (usually vortical) impinging on structural
surfaces. Bluffed bodies on horizontal and vertical surfaces Wings,
strakes etc.. on vertical tails (often a twin tail problem)
Reduces structural life
Dynamic AeroelasticityFlutterDynamic instability where-by the
system extracts energy from the free stream flow producing a div...
Usually resultant of coupling of 2 or more structural modes- Wing
bending and torsion- Wing bending control surface hinge torsion-
Wing torsion fuselage bending- Horizontal or vertical tail and
fuselage
Divergent behavior can occur within a few cycles and be
catastrophicsome men fear flutter because they do not understand
it, while others fear it because they do[8]
Dynamic AeroelasticityFlutterFrom the aeroelastic EOM(20)let
(21)Where represents motion independent external forcesEq. (20)
can be written as
(22)For stability solve the homogenous equation from some
initial state.
(23)
Eigenvalue SolutionsTransform (23) to modal coordinates and
assume that the unsteady aerodynamics depend only on
disp...(24)Assume that the structural response is separable and
synchronous
(25)With independent of time and .Substituting into (24)
gives
(26) Eq. (26) is the basic flutter eigenvalue equation All
matrices can be expressed as real but the aeroelastic stiffness
matrix is unsymmetric causi... - Generalized unsteady aerodynamic
forces- Often assumed harmonic cast in frequency domain with
amplitude and phase- Doublet Lattice, CPM, Mach Box, Strip
Theory
Several solutions exist for solving (26)- Method- Method-
Method- Method- State space
P-K Flutter Solutioncan be expressed as . (26) becomes(27)-
selected freestream speed- reference semi-chord- complex response
frequency and eigenvalue, , generalized mass, damping, stiffness
matrices- generalized aerodynamic matrix- freestream density-
reduced frequency,- eigenvector of modal coordinates- damping
factor
Dynamic AeroelasticityDynamic AeroelasticityP-K Method Comments
Matrices are real but non-symmetric yielding complex roots. Flutter
equation only true when , an estimate elsewhere Mode switching
often occurs making results interpretation difficult depends on
Mach number and reduced frequency Solution requires to be a
continuous function of .- Results in curve fitting which can cause
errors
Above formulation does not allow User responsible for
determining match point solutions
Dynamic AeroelasticityAGARD 445.6 Flutter CalculationsMode
Shapes and frequencies
Dynamic AeroelasticityAGARD 445.6 Time Integration Response
Dynamic AeroelasticityAGARD 445.6 Time Response Integration
Dynamic AeroelasticityAGARD 445.6 P-K Flutter Solution
Dynamic AeroelasticityAGARD 445.6 P-K Flutter Solutionradrad
Dynamic AeroelasticityAGARD 445.6 P-K Flutter Solution
Aeroelastic SoftwareGlobal Aeroelastic Software Developments
MSC/NASTRAN (U.S.) UAI/ASTROS (recently bought by MSC) (U.S.)
UAI/NASTRAN (U.S.) ELFINI (France, Dessault) LAGRANGE (Germany,
formerly MBB) STARS (Great Britain, RAE) OPTSYS (Sweden, SAAB)
COMPASS (China) ARGON (Russia, Central Aerohydrodynamic
Institute)
Aeroelastic SoftwareMSC/NASTRAN Steady Aerodynamics- Subsonic
Doublet Lattice (k=0) 3-D panel Method (available in the near
future) Bypass option for any AIC- Supersonic ZONA51 Bypass option
for any AIC Aerodynamic database Import/export loads data
Unsteady Aerodynamic- Subsonic Doublet Lattice with body
interference Strip Theory- Supersonic Mach Box Piston Theory
ZONA51
Structural Modeling- Very rich selection of FE
Static Aeroelastic Analysis- 5 DOF trim (no drag/thrust trim)-
Flexible increment analysis- Computes rigid, restrained and
unrestrained flexible stability derivatives- Able to add
experimental load correction factors to AIC- Divergence of
restrained vehicle- Slender body models- Multiple set selectable
aerodynamic models- Aeroelastic database- Import/export loads
data
Dynamic Aeroelasticity- Frequency response analysis- Random
analysis- Transient analysis- Gust (random and discrete 1-d)-
Flutter P-K, K, K-E (K-E allows k=0)- curve fits cubic through all
points
F-S Interface- Infinite plate spline- Thin plate spline- Finite
plate spline- Beam spline- Rigid load Transfer
Pre-Post Processing- Extensive Flight Loads pre/post processing
functionality in PATRAN environment
Aeroelastic SoftwareUAI/ASTROS Aeroelastic Capabilities Steady
Aerodynamics- Subsonic USSAERO (Woodward Aerodynamics, flat panel)
QUADPAN (Lockheed Martin, 3-D panel) Bypass option for any AIC
Multiple set selectable aerodynamic models- Supersonic USSAERO
(flat panel) QUADPAN (3-D panel) Bypass option for any AIC
Unsteady Aerodynamic- Subsonic Doublet Lattice- Supersonic
Constant Pressure Method (Apa, Northrop)
Structural Modeling- Membrane type FEM (Rods, Beams, Shear
panels, Quadrilateral Plates, Composites)
Static Aeroelastic Analysis- Full 6 DOF Trim- Computes rigid and
four types of flexible stability derivatives- User defined loads-
Trim Optimization
Dynamic Aeroelasticity- Gust Response- Flutter P-K (computes
flutter velocity)- Several choices for curve fits
F-S Interface- Infinite Plate spline- 3-D surface spline- Beam
spline- Rigid load Transfer
Very easy to add user defined functionality and tailor the
system
Dynamic AeroelasticityDynamic Aeroelasticity(23) can be solved
by time integration or as an eigenvalue problem
Aeroelastic SoftwareAeroelastic SoftwareAeroelastic
SoftwareAeroelastic Software