Embed Size (px)
Citation preview

R3-B.2: Advanced Imaging & Detection of Security Threats Using Compressive Sensing
I. PARTICIPANTS
Faculty/Staff Name Title Institution Email
Jose Martinez PI NEU [email protected]
Hipolito Gomez Sousa Post-Doc NEU [email protected]
Juan Heredia Juesas Post-Doc NEU [email protected]
Graduate, Undergraduate and REU StudentsName Degree Pursued Institution Month/Year of Graduation
Galia Ghazi PhD NEU 8/2017
Luis Tirado PhD NEU 3/2018
Ali Molaei PhD NEU 5/2018
Richard Obermeier PhD NEU 12/2018
Chang Liu PhD NEU 12/2018
Anthony Bisulco BS NEU 5/2019
Luigi Annese BS NEU 5/2019
Alex Zhu High School Wayland High School 5/2019
Diego Cachay High School Boston Latin School 5/2019
II. PROJECT DESCRIPTION
A. Project Overview
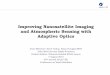
As the problem of identifying suicide bombers wearing explosives concealed under clothing becomes in-creasingly important, it becomes essential to detect suspicious individuals at a distance. Systems which em-ploy multiple sensors to determine the presence of explosives on people are being developed. Their functions include observing and following individuals with intelligent video, identifying explosives residues or heat signatures on the outer surface of their clothing, and characterizing explosives using penetrating X-rays [1, 2], terahertz waves [3-5], neutron analysis [6, 7], or nuclear quadrupole resonance (NQR) [8, 9]. At present, radar is the only modality that can both penetrate and sense beneath clothing at a distance of 2 to 50 meters without causing physical harm. The objective of this project is the hardware development and evaluation of an inexpensive, high-resolution radar that can distinguish security threats hidden on individuals at mid-ranges (2-10 meters) using an “on-the-move” configuration, and at standoff-ranges (10-40 meters) using a “van-based” configuration (see Fig. 1 on the next page).
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

B. Biennial Review Results and Related Actions to Address
The reviewers identified several strengths for this project. Among them are the following: 1) rapid adap-tation of the first generation (Gen-1) of the imaging system and algorithm development for the other gen-eration systems; and 2) quantitative performance evaluation of the imaging system for both synthetic and experimental data. The reviewers identified the following weaknesses of this project: 1) the need to identify the sequence of tasks that will be followed to reach a successful conclusion; 2) the need to study non-uniform fast Fourier transform (FFT); and 3) the need to define the transition timelines/plans. In Year 4, we addressed the first weaknesses as follows: 1) We worked on the Alternating Direction Method of Multipliers (ADMM)-based compressive imaging for the data collected by the second generation (Gen-2) system. In Year 5, we will address the second and third weaknesses as follows; 2) We will study the extension of the FFT to 3D, including the non-uniform FFT; and 3) We will schedule a transition plan with our industry partner HXI and the ALERT Transition Team.
Figure 1: General sketch of the inexpensive, high-resolution radar system used for detecting security threats (a) at mid-ranges using an “on-the-move” configuration, and (b) at standoff-ranges using a “van-based” configuration.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

C. State of the Art and Technical Approach
The outcome of this project would be the first inexpensive, high-resolution radar system with a special ap-plication to detect and identify potential suicide bombers. Its uniqueness is based on the ability to work on multistatic configurations, in which the information from multiple receivers and transmitters are coherently combined by using a common local oscillator. This project has the potential to be the first radar system that is capable of functioning at multiple ranges for both indoor and outdoor scenarios. An analysis of the state of the art is incorporated into Section II.D.Table 1 shows the algorithmic development road map, including the steps needed to go from a 3D mechanical scanning imaging system (Gen-1 [10]) to a 3D fully electronic scanning imaging system (Generation 3, Gen-3 [11,12]). An intermediate imaging system (Gen-2), capable of imaging small targets in a fully electronic fash-ion and large targets in a hybrid electrical/mechanical fashion, will be used for a smooth transition between the Gen-1 and Gen-3 imaging systems.
The following activities were developed for this project: 1) ADMM-based Compressive Imaging using syn-thetic and experimental data of the Gen-2 system and a potential Gen-3 system configuration (Task 2.4 and 3.4); 2) new Compressive Imaging Algorithms using synthetic data (Task 2.6); and 3) design of a high-capac-ity sensing system for Compressive Sensing (CS) imaging applications (Task 3.5). This project is intimately related to ALERT Project R3-B.1, “Hardware design for ‘Stand-off’ and ‘On-the-Move’ Detection of Security
Table 1: Algorithmic development roadmap towards a fully electronic radar imaging system: from Gen-1 [10] to Gen-3 [11, 12].
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Threats,” because it develops the imaging algorithms for the R3-B.1 hardware system. Additionally, many of the technologies and techniques developed for this project are commonly used in near-field applications by other ALERT projects, including Projects R3-A.2 and R3-A.3.
D. Major Contributions
A summary of the Year 4 major contributions can be found in Table 2.
E. Milestones
E.1. ADMM-based Compressive Imaging (Tasks 2.4 and 3.4)
This year, we have continued our research on our ADMM-based CS algorithm that enables 3D imaging of se-curity threats in a distributed fashion. Specifically, this year we have extended our ADMM method in order to allow a joint inversion using a combined Norm-1 and Norm-2 regularization in a fully parallelizable fashion, thus enabling quasi real-time imaging. Moreover, we have developed a new mathematical formulation that will enable to solve the problem after breaking the sensing matrix by rows, by columns, or both, in order execute the inversion in an even more distributed fashion. These efforts are described in the next section.
E.1.a. ADMM-based Compressive Imaging using joint Norm-1 and Norm-2 regularization
The alternating direction method of multipliers (ADMM) has been presented in previous works with a Norm-1 regularization. It can be extended to other regularizations. Here we present a newly developed capability that enables our ADMM algorithm to use joint Norm-1 and Norm-2 regularizations. Specifically, the new algorithm uses a linear combination of both regularizations in the consensus distributed fashion, as it can be seen next.Given the linear problem
where is the vector of measurements, is the sensing matrix, represents the noise collected by the receiver, and is the unknown complex vector; the Norm-1 and Norm-2
Table 2: Summary of this year’s major contributions.
(1)
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

regularization consensus ADMM problem is defined as follows:
where Hi are row submatrices of the sensing matrix H, and gi are subvectors of the vector of measurements g. The variables ui are copies of the unknown vector u, which are used for solving the problem for each Hi and gi. The constraint forces that all partial solutions agree through is the variable v. The parameter α is a weight value which varies between 0 (corresponding to Norm-1 regularization only) and 1 (corresponding to Norm-2 regularization only).The Lagrangian function for this methodology is defined as follows:
where si are the dual variables for each constraint.This problem is solved by the iteration of the following solutions:
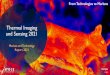
Notice that, for α = 0, the consensus variable v is the soft-thresholding of the averaging of u and s, as expected for Norm-1 regularization; meanwhile for α = 1, the variable v is just the averaging of u and s, as expected for Norm-2 regularization. A different value of α will produce a weight combination of Norm-1 and Norm-2 regularizations. The 2-D balls of the combination of Norm-1 and Norm-2 for different values of the parameter α are shown in Figure 2 (on the next page).
E.1.b. ADMM-based Compressive Imaging using rows and columns division of the sensing matrix
Up until now, we have performed the consensus-based ADMM dividing the sensing matrix into rows, but it can be extended to the matrix division into rows and columns. It is important to note that for a given problem this scheme enables the user to solve even smaller problems in a more distributed fashion. Considering the same problem as in (1), let us divide the sensing matrix into M sub-rows and N sub-columns, as shown in Figure 3 (on the next page).The problem to solve is now of the following form:
where is the i-th replic of the j-th sub-vector of the unknown vector u. The Lagrangian function is the following:
(3)
(4)
(5)
(6)
(7)
(8)
(2)
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

where are the dual variables for each constraint.The solution of this optimization problem is given by the following iterative solutions:
(11)
Figure 2: 2-D balls of the combination of Norm-1 and Norm-2 for different values of the parameter α.
Figure 3: Representation of the division of the sensing matrix by rows and by columns.
(9)
(10)
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

E.1.c. Preliminary results of the ADMM-based Compressive Imaging algorithm
In order to test the algorithms presented above, a random matrix has been generated with Gaussian values. A known vector is considered as a reference. The measurements vector is obtained by the multiplication g = H ∙ u. In the following examples, the final solution is compared to the reference one. Moreover, the primal rk and dual dk residual errors are also presented; these errors are given by the following expressions:
Example #1: In this example, u is set to be a sparse vector with 90% entries equal to 0. As expected, the recon-struction with Norm-1 regularization tries to find the sparsest solution. As shown in Figure 4, the algorithm is capable of recovering the actual solution with a high fidelity in less than 150 iterations.
Example #2: In this example, the ADMM is executed using Norm-2 regularization. This configuration of the algorithm searches for the solution with lower energy. In the next three cases, we consider a square sensing matrix . As it is shown in Figure 5, the algorithm is capable of recovering the original signal with high fidelity in only 150 iterations.
(12)
(13)
Figure 4: Reconstruction of a sparse vector with ADMM using Norm-1 regularization.
Figure 5: Reconstruction of a sparse vector with ADMM Norm-2 regularization.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Example #3: In this example, the vector u is non-sparse, and . As it is shown in Figure 6, the ADMM with Norm-1 regularization, which searches for the sparsest solution, provides a good reconstruction.
Example #4: In this example, the vector u is still non-sparse, and . As it can be seen in Figure 7, the ADMM with Norm-2 regularization, which finds the solution with minimum energy, provides a good re-construction.
Example #5: At first glance, after looking at the results in the last two examples, it is not clear which regu-larization technique—Norm-1, Norm-2, or even a linear combination of them—may lead to the best recon-struction. The following example investigates this concept by specifically applying the ADMM algorithm to different linear combinations of the Norm-1 and Norm-2 regularizers for different sparsivity levels. With an underdetermined sensing matrix , which implies recovering vectors of 100 elements with 75 measurements, the compressive sensing criteria for real signals states that the maximum sparsivity level that the vector u could have when using Norm-1 regularizers is less than 75/2 ≈ 37.5. For higher sparsivity levels, more than 37.5 non-zeros, compressive sensing techniques using Norm-1 regularizers do not ensure the reconstruction of the original signal; so, for these cases, using a linear combination of the Norm-1 and Norm-2 regularization may lead to a better solution. An analysis for different sparsivity levels has been conducted, in order to find the best combination between
Figure 6: Reconstruction of a non-sparse vector with ADMM Norm-1 regularization.
Figure 7: Reconstruction of a non-sparse vector with ADMM Norm-2 regularization.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Norm-1 and Norm-2 that leads to a minimum quadratic error of the reconstructed signal. The parameters of α, λ and μ are optimized according to Equation (2). The results are presented in Figure 8 and Table 3. It is clear to see that, as expected, for low sparsity levels less than 40, the Norm-1 is predominant. However, when the number of non-zero elements increase, a linear combination of the two norm leads to the best result. In the extreme case, in which the number of non-zero elements is 100, the best result is achieved when the weight of the Norm-1 regularizer is one fourth of that of the Norm-2 regularizer.
Figure 8: Reconstruction for different sparsivity levels. Original (blue), reconstructed (red). The error indicates the Norm-2 of the difference between the original and the reconstructed vectors.
Table 3: Numerical values of the optimal parameters for the analysis of different levels of sparsivity.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Example #6: The Norm-1 regularized ADMM algorithm has been tested for sparse signals when the sensing matrix is divided by rows, by columns, and by both rows and columns. Note that solving the problem in this distributed fashion will be very important for quasi-real time imaging applications. The sensing matrix is cre-ated using random Gaussian entries, . The results when the sensing matrix is divided into 5 rows, 4 columns, and 5 rows and 2 columns are pre-sented in Figure 9 (on the next page). When the sensing matrix is divided only into columns, the convergence is slower than when it is only divided into rows, as can be noticed when comparing the dual residual con-vergence of Figure 9a and Figure 9b. Finally, when dividing the sensing matrix by rows and columns at the same time, the algorithm converges obtaining a solution very close to the original one, as shown in Figure 9c. These simple examples show that our Norm-1 regularized ADMM algorithm works for sensing matrices that are divided into rows and columns.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Figure 9: Reconstruction of a sparse vector with ADMM Norm-1 regularization when the sensing matrix is divided into (a) 5 rows, (b) 4 columns, and (c) 5 rows and 2 columns.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

E.2. New Compressive Sensing and Imaging algorithms (Task 2.6).
This year we have worked on new Compressive Sensing and Imaging algorithms that have the potential to perform imaging with a reduced number of measurements and hardware components. This work is summa-rized next.
E.2.a. Physicality Constrained Compressive Sensing
This year, we have also developed a new Physicality Constrained Compressive Sensing algorithm. In electro-magnetic imaging applications, one attempts to reconstruct the constitutive parameters or reflectivity profile of an object of interest from a set of scattered electric field measurements. Reconstruction accuracy is largely dependent upon the fidelity of the measurements, that is, the total number of measurements and their de-gree of independence. When classical imaging algorithms are employed, the reconstruction accuracy can be improved by increasing the number of measurements, for example by recording measurements at more locations or by exciting the object of interest using more frequencies. If performed naively, however, this ap-proach can be expensive, both in terms of the hardware complexity of the imaging system and in terms of the information efficiency of each measurement. As more measurements are added to the system, the amount of additional information obtained by each new measurement can decrease dramatically.Compressive Sensing (CS) is a novel signal processing paradigm, which states that sparse signals can be recovered from a small number of linear measurements by solving a convex and computationally tractable
-norm (Norm-1) minimization problem. Accurate recovery is only guaranteed when the sensing matrix is “well-behaved’” according to a set of performance measures that relate the independence of the columns of the sensing matrix. Many electromagnetic imaging applications can be linearized using the Born approx-imation, wherein the unknown vector is the contrast variable. The contrast variable is related to the unknown complex permittivity ∈ of the scatterers and the known complex permittivity ∈b of the background medium according to the relationship x = diag(∈b)-1(∈ - ∈b). When the contrast variable is known to be sparse, standard CS techniques have been shown to be successful. However, these techniques are sub-optimal be-cause they do not consider the fundamental constraints placed on the permittivity by the laws of physics.Instead of using standard CS techniques, in [13], we proposed the use of the following Physicality Constrained Compressive Sensing (PCCS) optimization program:
Unlike the standard CS problems, the PCCS optimization program requires the solution vector to be physical-ly realizable. Intuitively, one expects that the PCCS program will generate more accurate solutions than the standard CS program. To demonstrate this, consider the images displayed in Figure 10 (on the next page). These images consider a two-dimensional imaging problem in which the measurements are noiseless (η = 0) and the background medium is freespace (∈b = 1, so that the physicality constraints reduce to Re(x) ≥ 0 and Im(x) ≥ 0). In both figures, the blue line represents the set of solutions that match the measured data, the green box represents the solutions that satisfy the physicality constraints, and the red diamond represents the -ball of a certain radius. The left image shows that the standard CS solution occurs at x = (-1,0)T, x = (0,1)T which violates the physicality constraint. The right image, however, shows that the PCCS solution oc-curs at , which is the true sparse solution to the problem.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

To demonstrate the effectiveness of PCCS even further, we performed a numerical analysis of the reconstruc-tion accuracies of the traditional CS and PCCS problems in [13]. Figure 11 displays the reconstruction accu-racies for the standard CS and PCCS problems for a sensing matrix . For small sparsity levels, both techniques performed equally well; however, for sparsity levels greater than 10, the PCCS program clearly outperformed the standard CS program.
E.2.b. Sensing Matrix Design via Mutual Coherence Minimization for Electromagnetic Compressive Imaging Applications (Task 2.6)
It is well known that the success of Compressive Sensing (CS) technique largely depends upon properties of the sensing matrix A. The Restricted Isometry Property (RIP) is the most commonly used performance metric for assessing the CS recovery capabilities of a sensing matrix because it provides the most powerful bounds on the reconstruction performance. One drawback of the RIP is that it is extremely difficult to verify for deterministic matrices. To get around this issue, researchers resort to generating sensing matrices whose
Figure 10: Comparison of the standard CS and PCCS optimization programs: (left) standard CS; (right) PCCS.
Figure 11: Comparison of the reconstruction accuracies of standard CS and PCCS.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

elements are drawn from independent and identically distributed sub-Gaussian random variables. Random sensing matrices of this form have been shown to satisfy the RIP with overwhelming probability. Unfortu-nately, random matrices cannot be utilized in many real-world applications, such as electromagnetic imaging applications.In our recent paper [14], we introduced a sensing matrix design method based on the mutual coherence. Al-though the mutual coherence provides weaker reconstruction guarantees than the RIP, it is a more practical metric for deterministic matrices. Formally, the coherence of a sensing matrix is defined as follows:
where ai is the i-th column of the sensing matrix. Unlike the RIP, which requires an exponentially increasing number of computations, the coherence can be computed using only N(N - 1)/2 vector inner products. In the coherence minimization design method, the sensing matrix is assumed to be a function of design variables according to the possibly nonlinear, but differentiable relationship A = f(p). The de-sign algorithm then seeks the minimizer for the following optimization program:
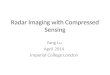
where Qp defines the feasible set of values that p can take. This is a nonlinear, non-convex problem, which can be solved using the Augmented Lagrangian method after some refactoring.A numerical analysis was performed [14] in order to assess the capabilities of the coherence design method. Consider an imaging system in which a single transmitting and receiving antenna is used to excite a region of interest with a single frequency. This antenna was constrained to operate at 64 positions within a 5λ × 5λ grid located a distance of 5λ away from the imaging region. The objective of the design problem was to select the locations that the antenna would operate at Figure 12 (on the next page) displays the locations that the antenna operated at for the baseline design (blue) and the optimized design (red). While the sensing matrix for the baseline design, which distributed the antenna positions uniformly, had a coherence of 0.8300, the optimized design had a coherence of 0.2252. Intuitively, one would expect the optimized design to provide better CS reconstruction performance than the baseline design. This result is confirmed by Figure 13 (on the next page), which displays the reconstruction accuracies of the baseline design (blue), optimized design (red), and a random design (green) for reference when Orthogonal Matching Pursuit (OMP) is used as the reconstruction algorithm.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

E.3. Design of high-capacity sensing system for CS imaging applications (Task 3.5)
E.3.a. Design of a compressive reflector for enhancing the sensing capacity
This year, we have studied a new Compressive Reflector Antenna (CRA), based on digitized Metamaterial Ab-sorbers (MMAs), as a mechanism to enhance the sensing capacity of mm-wave imaging systems. The sensing system, as shown in Figure 14 (on the next page), is composed of a specially tailored compressive reflector antenna fed by a 2D array of conical horns. The conical horns are configured in a cross shape along the focal plane of the reflector, and it is arranged as follows: NTx transmitting and NRx receiving elements are positioned equidistantly along the x-axis and y-axis, respectively. The feeding element parameters—including (but not limited to) the number of horns, spacing between them, and amplitude taper on the reflector’s edge—deeply impact the performance of the imaging system. Indeed, these parameters should be selected in a way that the effective aperture, obtained after convolving the transmitting and receiving arrays, is capable of imaging the whole region of interest.
Figure 12: Antenna positions of the baseline design (blue) and optimized design (red).
Figure 13: CS reconstruction accuracies for the baseline design (blue), optimized design (red), and random design (green) using OMP.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

The MMA-based CRA consists of a traditional parabolic reflector antenna, whose surface is covered with digitized MMAs (Figure 15 shows the front view of a 4-bit MMA aperture). Based on the ‘1’ or ‘0’ values as-sociated with each digit of the binary number, the MMA may or may not absorb the incident electromagnetic power at different resonance frequencies, respectively. For example, in the 4-bit MMA design shown in Figure 15, the first, second, third, and fourth digits correspond to resonances at 71 GHz, 73 GHz, 75 GHz and 77 GHz, respectively. Simulations show that the bandwidth for the single resonance MMAs is about 1.56 GHz, corre-sponding to an approximate quality factor of 46.
Figure 14: Illustration of the proposed imaging setup. The feeding array located on the focal plane induces currents on the surface of the CRA, which ultimately creates the spectral codes in the imaging region. The spectral codes (mag-nitude of electric field) created by the CRA are shown as a function of frequency, while the CRA is illuminated by Tx2.
Figure 15: Front view of the proposed CRA. The surface of the reflector is divided into 16 domains and each domain is coated with a unique 4-bit MMA.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

A meander-line MMA has been designed (see Figure 16) to build the unit-cell of the digitized MMAs. The MMA unit-cell is simulated and designed using the commercial software HFSS. A general incident plane wave with an arbitrary elevation (θ) and azimuth (φ) angle is defined to excite the unit-cell (Figure 16b). The unit-cell benefits from two unique features: 1) It is almost insensitive to the polarization of the incident plane wave, i.e. for a given elevation incident angle (θ in Figure 16), the reflection coefficient is not significantly altered for different azimuth incident angles (φ in Figure 16); and 2) It has a near-unity absorption rate for wave excitations with normal incident angles, i.e. for the elevation incident angle of θ = 0, the absorption rate value which is defined as , is near unity.
A set of simulations was performed demonstrating the aforementioned features of the MMA. Specifically, Figures 17a and Figure 17b (on the next page) illustrate the absorption rate and |S11|2 plots for TE and TM ex-citations, respectively. The plots are for a fixed value of elevation (θ = 300) and different azimuth incident an-gles (φ= 00; 300; 600; and 900). These figures show that only a small frequency shift of the resonant frequency (less than 0.3%) is produced for different incident angles. Moreover, the peak at the resonant frequency is in all cases very close to unity (larger than 0.99). The absorption bandwidth, defined as the frequency range in which absorption is above one half of its maximum value, is 1.64 GHz.
Figure 16: (a) Top view, and (b) 3-D view of the polarization-independent meander-line MMA unit cell. The dimensions in μm are: ax = ay = 1300, l = 398, w = 43, g = 43.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Based on this MMA unit-cell design, a scaling factor has been used to obtain designs resonating at different frequencies. In this regard, MMAs with resonances at 73 GHz, 75 GHz, and 77 GHz were achieved by using a scaling factor of S = 0.97, S = 0.95, and S = 0.93, respectively. For the new designs, the periodicities of the unit-cell (ax and ay) are kept the same and the scaling is applied only on the geometrical parameters of the meander-line pattern (l, w and g). Figure 18 depicts the absorption rate and |S11|2 for the four MMA designs, which are excited by a TEM-mode plane wave.
Figure 17: Absorption rate (solid lines) and |S11| (dashed lines) of the polarization-independent MMA at various incident angles for the (a) TE, and (b) TM incidence.
Figure 18: Absorption rate (solid lines) and |S11| (dashed lines) of the MMAs with different scaling factors for the TEM excitation: (black) S = 1.00, (blue) S = 0.97, (red) S = 0.95, and (green) S = 0.93.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

In order to design a 4-bit MMA, the unit-cell design is extended to a 2⨉2 unit cell configuration, as illustrated in Figure 19a (on the next page). Each digit of the 4-bit MMA is associated with one of the four basic MMA unit-cell designs. Based on the ‘1’ or ‘0’ values associated with each digit of the 4-bit binary number, the MMA may or may not absorb the incident electromagnetic power at four different resonance frequencies, respec-tively. The scaling factor S for the first, second, third and fourth digits corresponds to resonances at 71GHz, 73GHz, 75GHz and 77GHz, respectively. Figures 19b through 19f illustrate the absorption rate as well as the magnitude and phase of S11 plots, for some examples of the presented 4-bit MMA. A TEM-mode plane wave is used to illuminate the MMA. It is apparent from the plots that there is some frequency shift in the peak value of the absorption rate, with respect to the expected resonance frequency. This is due to the mutual coupling between the adjacent digits. However, the scaling factors for each digit could be customized so that absorp-tion rate peak can be tuned to be at the desired frequency. The volume loss density in the top layer for the ‘1111’ MMA is shown in Figure 19; it is excited with the TEM-mode plane wave for φ = 00 (Figure 19b), φ = 450 (Figure 19c), and φ = 900 (Figure 16d). As illustrated in Figure 20b (on the following page), the electric field has only components in x-axis; and, therefore, only meander-lines with their long side aligned in y-axis will absorb the incident power. In Figure 20c, the electric field has components in both the x-axis and y-axis; hence, meander-lines having their long side aligned in x-axis and y-axis will both absorb the incident power. Finally, as expected, at each frequency only the MMA digit associated to that frequency absorbs the incident power.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Figure 19: Examples of absorption rate and S11 of the (a) 4-bit MMA unit cell with binary digits of (b) ‘0011’, (c) ‘0101’, (d) ‘0111’, (e) ‘1001’, and (f) ‘1111’.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

The performance of the 4-bit MMA-based CRA is evaluated in an active mm-wave imaging application. The physical and electrical parameters of the imaging system are described in Table 4 (on the next page). Our numerical solver (MECA), which is based on physical optics, was used for the simulations. The measurements were collected through a 7 GHz frequency span around a 73.5 GHz center frequency. The range distance be-tween the focal plane of the CRA and the center of the imaging domain was 84 cm; and the aperture size D in both x-axis and y-axis was 30 cm. The range and cross-range resolution of the imaging system is calculated to be Rr = 21.4 mm and Rcr = 23 mm, respectively. Accordingly, the imaging domain was discretized according to the proposed range and cross-range resolution.
Figure 20: Volume loss density on top layer of the 4-bit MMA unit cell with binary digit of ‘1111’ for the (a) TEM exci-tation with (b) φ = 00, (c) φ = 450, and (d) φ = 900.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

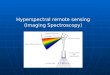
The sensing matrix H was calculated using our MECA solver. Figure 21a shows the improved singular value distribution of the CRA when compared to that of the Traditional Reflector Antenna (TRA), and Figure 21b shows how the sensing capacity of the CRA is enhanced when increasing the Signal to Noise Ratio (SNR). Fig-ure 21b shows that there is an enhanced capacity when using the frequency-dependent MMAs to the imaging system. For example, if we assume an SNR level equal to 40 dB, the metamaterial-based reflector would have 97 more effective numbers of singular values (measurement codes) above the noise floor than the traditional reflector antenna. Ultimately, this would improve the sensing capacity of the MMA-based reflector, which can be inferred as an enhancement in the imaging performance.
Table 4: Design parameters of the single CRA.
Figure 21: (a) Normalized singular value distribution and (b) sensing capacity comparison between the TRA and the 4-bit CRA.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

By plotting the field patterns in the imaging region, one can study the codes as a function of frequency. Figure 22 shows the radiation pattern of the MMA-based reflector on the xy-plane at a distance z = 85 cm from the focal plane. These radiation patterns correspond to the case where Rx2 is exciting the reflector, and they are plotted for 70.5 GHz (Figure 22a), 72.5 GHz (Figure 22b), 74.5 GHz (Figure 22c) and 76.5 GHz (Figure 22d). As expected, the radiation pattern for each one of the antennas is frequency dependent. This behavior is due to the dispersion of the 4-bit MMAs.
The resolution of the MMA-based reflector can be shown by plotting the Point Spread Function (PSF) of the system. This is shown in Figure 23 (on the next page) when the PSF is focused at ([0, 0, 85]cm and [5, 5, 85]cm). Figure 23a and Figure 23b shows the PSF of the receiver and transmitter array, respectively, and Figure 23c is showing product of the receiver and the transmitter array PSFs.
Figure 22: Electric field radiation pattern of the CRA system excited with Rx2 and plotted at the range of 85 cm at (a) 70.5 GHz, (b) 72.5 GHz, (c) 74.5 GHz, and (d) 76.5 GHz.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

The performance of the imaging system is tested on a 3D region containing several 2D PEC targets (see Fig-ure 24 on the next page). Specifically, the imaging region contains three vertically oriented rectangles, three horizontally oriented rectangles, one square, and one circle. The width and height of the rectangles are equal to 12 mm and 61 mm, respectively. The side of the square is 24 mm, and the circle has a diameter equal to 24 mm. The center of the imaging domain is considered to be 84 cm far from the focal plane of the reflector, and the PEC scatterers are located in four different range positions, separated by 21 mm. The iso-contours in Figure 20 represent the level of the reflectivity, and the triangular facets show the position and shape of the
Figure 23: Beam focusing at (left) [x, y, z] = [0, 0, 85]cm, and (right) [x, y, z] = [5, 5, 85]cm, by the (a) receiver array, (b) transmitter array, and (c) product of the receiver and the transmitter array BFs.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

targets. The reconstruction for imaging using the traditional reflector antenna and the MMA-based reflector antenna are shown in Figure 24a and Figure 24b, respectively. The imaging has been carried out using the aforementioned Norm-1 regularized ADMM algorithm, for both the traditional and the MMA-based reflector. It is evident that the performance of the MMA-based reflector is superior to that of the traditional reflector.
E.3.b. Compressive Imaging of extended human-size regions using an array of CRAs.
As the last example of the high-capacity sensing systems, a CRA-based array made of six compressive reflec-tors is designed, in order to be able to image an extended human-size region. As depicted in Figure 25 (on the next page), the CRA is manufactured by introducing a set of discrete applique scatterers on the surface of a TRA. Each CRA is illuminated with two orthogonal transmitting and receiving arrays located on the focal plane. The electromagnetic cross-coupling between adjacent CRAs is used in order to enhance the sensing ca-pacity of the system, as well as to extend the region that it can image. The proposed millimeter-wave sensing and imaging system is composed of six CRAs positioned in a cross configuration, as shown in Figure 26a (on the page following the next). The design parameters for each one of the reflectors are shown in Table 5 (on the next page). Both the vertical receiving array and the horizontal transmitting array of each CRA consists of 18 uniformly distributed conical horn antennas as shown in Figure 26b. The radar operates in the 70-77 GHz frequency band and only 10 frequencies are used to perform the imaging. Each CRA is designed to effectively be able to image over a projected circular area of 40 cm diameter in cross range (see red solid circles in Fig-ure 26a) when the target is located 90 cm away from the focal plane. It is important to note that additional shaping techniques could be used in order to image over a wider projected cross range region. The CRA has an aperture size of 50 cm; and, as a result, none of the two adjacent CRAs will be able to image the region located between their two circular projections (see dashed green solid circle in Figure 26a). This drawback can be easily solved by coupling the information coming from the adjacent reflectors in a multi-static fashion, as illustrated by two green dashed arrows in Figure 26a. Given the aforementioned location of the target, this work only considered the electromagnetic cross-coupling between CRA-l and CRA-k: (l = 1; k = 2), (l = 1; k = 3), (l = 1; k = 4), (l = 2; k = 5), and (l = 5; k = 6).
Figure 24: Reconstructed image using ADMM iterative method for (a) the TRA and (b) the 4-bit CRA.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

Table 5: Design parameters for a single CRA.
Figure 25: 2D cross-section of a Traditional Reflector Antenna (x > 0) and Compressive Reflector Antenna (x < 0).
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

The target used in the simulation is a tessellated model of a human body. In this work, the 3D human model was projected onto a 2D plane located 90 cm away from the focal plane, and its extension to 3D will be a future line of investigation. Figure 27a shows the improved singular value distribution of a single CRA when compared to that of a TRA and Figure 27b shows how the sensing capacity of the CRA is enhanced for dif-ferent Signal to Noise Ratios (SNRs). Finally, Figure 28 (on the next page) demonstrates that the proposed imaging system is capable of accurately reconstructing the target under investigation.
Figure 26: (a) 3D view of the proposed millimeter-wave sensing system composed of six CRAs and (b) induced currents on a CRA excited by Tx1. The feeding transmitter (red) and receiver (blue) arrays are located on the focal plane of the reflector.
Figure 27: (a) the normalized singular value distribution and (b) the sensing capacity of a single CRA and TRA.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

F. Future Plans
• ADMM-based Compressive Imaging - For the next few years, the follow-on tasks and expected outcomes are the following:
○ Tasks 2.4 (Year 5) – Test and validate the algorithm in the Gen-2 system. Develop a Total Variation algorithm to exploit the sparsity of the image. The expected outcomes are a) validation of the algo-rithm in 3D with synthetic and experimental data in the fully electronic (Mode-E) Gen-2 system; and b) validation of a novel Total Variation algorithm.
○ Task 3.4 (Year 5 and beyond) – Test and validate the algorithm in the Gen-3 system. The expected outcomes are a) validation of the algorithm in 2D with synthetic and experimental data; and b) vali-dation of the algorithm in 3D with synthetic and experimental data.
• Design of a high-capacity sensing system for CS imaging applications. For the next few years, the fol-low-on task and expected outcome are the following:
○ Task 3.5 (Years 5, and beyond) – Extend the design of the high-capacity sensing compressive reflector to 3D. The expected outcome is the design and experimental validation of a 3D Gen-3 system present-ing maximum sensing capacity.
• Accelerating Compressive Imaging using multistatic FFT (including non-uniform FFT). For the next few years, the follow-on tasks and expected outcomes are the following:
○ Task 2.6 (Year 5 and beyond) – Test and validate the algorithm in the Gen-2 system. The expected outcomes are a) validation of the algorithm in 2D with synthetic and experimental data; and b) vali-dation of the algorithm in 3D with synthetic and experimental data.
○ Task 3.6 (Year 5 and beyond) – Test and validate the algorithm in the Gen-3 system. The expected outcome is the validation of the algorithm in 3D with experimental data.
III. RELEVANCE AND TRANSITION
A. Relevance of Research to the DHS Enterprise
Figure 28: Reconstructed image using iterative compressive sensing algorithm (NESTA).
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

The following features will be of special relevance to the Department of Homeland Security (DHS) enterprise:• Non-invasive, minimally-disruptive “On-the-Move” scanning with quality imaging and high throughput;
fast data collection in less than 10ms.• Full body imaging with interrupted forward movement during mm-wave pedestrian surveillance; in
multi-view. • A small number of non-uniform sparse array of Tx/Rx radar modules will minimize the cost of on-the-
move; five transmitters +five receivers + 10 switches.
B. Potential for Transition
The features of “On-the-Move” have attracted the attention of several industrial and government organiza-tions. • Industrial transition partners: HXI, Inc., L3 Communication, Rapiscan, and Smiths Detection.• Target government customers: Transportation Security Administration (TSA), the U.S. Department of
Justice (DOJ), Customs and Border Protection (CBP), and the Department of State.
C. Data and/or IP Acquisition Strategy
The hardware and algorithmic design, integration, and validation performed under this project will contin-ue to generate IP. In the past, several provisional patents have been submitted to Northeastern University’s (NEU) IP office, and our connection with different transition partners will facilitate its transition into indus-try. Moreover, the hardware will also be used to create benchmark datasets that may be used by industry stakeholders in order to assess the performance of their reconstruction/imaging algorithms. Moreover, a new patent was awarded this year based on the work partially done in this project: U.S. Patent 9,575,045, “Signal Processing Methods and Systems for Explosives Detection and Identification Using Electromagnetic Radiation.”
D. Transition Pathway
HXI Inc. has been collaborating with our research team in the R3-B.2 project. Together, HXI and ALERT have designed, fabricated, integrated, and validated the radar system. We expect that after the assembling the first Gen-3 prototype, HXI will license our IP and transition the technology to the mm-wave imaging market. Ad-ditionally, new low-cost miniaturized modules are being developed by HXI for the next generation mm-wave system; some of these components will be tested by the Project R3-B.2 PI. The PI has also established a working relationship with Smiths Detection and L3 Communications, which bodes well for future collaboration and transition.
E. Customer Connections
Customer Names & Program Offices:• HXI – Mr. Earle Stewart• Smith’s Detection Systems – Dr. Kris Roe • L3 Communications– Dr. Simon PongratzFrequency of Contact & Level of Involvement in Project: • The PI has weekly meetings with HXI for the project. • The companies Smiths Detection and L3 Communications had 3 to 4 meetings with the PI last year.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

New proposals related to the topic of this research will be submitted to other federal funding agencies.
IV. PROJECT ACCOMPLISHMENTS AND DOCUMENTATION
A. Education and Workforce Development Activities
1. Course, Seminar, and/or Workshop Developmenta. Prof. Martinez-Lorenzo gave a talk entitled “Single-pixel mm-Wave Imaging Using 8-bits Meta-
material-based Compressive Reflector Antenna” at the Special Session “Emerging Techniques in Imaging at Microwave, Millimeter-wave and Terahertz Frequency Regimes,” of the Antennas and Propagation Symposium (San Diego, July 9-14, 2017). Prof. Martinez presented results generat-ed by Projects R3-B.1 and R3-B.2.
2. Student Internship, Job, and/or Research Opportunitiesa. Graduate students, Ali Molaei, Galia Ghazi, Luis Tirado, and Chang Liu play an important role in
our research project. They will continue to assist in development of new hardware design and integration for the mm-wave radar system.
b. Our undergraduate students, Anthony Bisulco and Luigi Annese, will continue to work on Proj-ects R3-B.1 and R3-B.2. They will continue to be pillars of this project.
3. Interactions and Outreach to K-12, Community College, and/or Minority Serving Institution Stu-dents or Facultya. The PI participated in the Building Bridges Program, which provides opportunities for high
school students to visit NU’s laboratories and gain hands-on research experience in order to engage them in STEM education.
b. The PI participated in the Young Scholars Program at Northeastern University, in which two high school students spent 6 weeks in Prof. Martinez’s lab learning about sensing and imaging.
4. Other Outcomes that Relate to Educational Improvement or Workforce Developmenta. Populating the research group with undergraduates brings homeland security technologies to
undergraduate engineering students, and establishes a pipeline to train and provide a rich pool of talented new graduate student researchers.
B. Peer Reviewed Journal Articles
1. Heredia-Juesas, J., Molaei, A., Tirado, L., Blackwell, W., & Martinez-Lorenzo, J. A. “Norm-1 Regular-ized Consensus-based ADMM for Imaging with a Compressive Antenna.” IEEE Antennas and Wireless Propagation Letters, PP(99), 21 June 2017. DOI: 10.1109/LAWP.2017.2718242
2. Obermeier, R. & Martinez-Lorenzo, J.A. “Sensing Matrix Design via Mutual Coherence Minimization for Electromagnetic Compressive Imaging Applications.” IEEE Transactions on Computational Imag-ing, 3(2), 17 February 2017. DOI: 10.1109/TCI.2017.2671398
3. Molaei, A., Heredia-Juesas, J., & Martinez Lorenzo, J.A. “Chapter 3: Compressive Reflector Antenna Phased Array.” Antenna Arrays and Beam-formation. Book edited by Modar Shbat, ISBN 978-953-51-3146-5, Print ISBN 978-953-51-3145-8, 10 May 2017. DOI: 10.5772/67663
4. Alvarez, Y.A. & Martinez-Lorenzo, J.A. “Compressed Sensing Techniques Applied to Ultrasonic Imag-ing of Cargo Containers,” Sensors, 17(1), 15 January 2017. DOI: 10.3390/s17010162
5. Obermeier, R. & Martinez-Lorenzo, J.A. “Model-based Optimization of Compressive Antennas for High-Sensing-Capacity Applications.” IEEE Antennas and Wireless Propagation Letters, 16, November
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

2016, DOI: 10.1109/LAWP.2016.26237896. Gonzalez-Valdes, B., Alvarez, Y., Mantzavinos, S., Rappaport, C., Las-Heras, F., & Martinez- Lorenzo, J.A.
“Improving Security Screening: A Comparison of Multistatic Radar Configurations for Human Body Imaging.” IEEE Antennas and Propagation Magazine, 58(4), pp. 35–47, August 2016. DOI: 10.1109/MAP.2016.2569447.
Pending-1. Tirado, L.E., Ghazi, G., Alvarez, Y., Las-Heras, F., & Martinez-Lorenzo, J.A. “A GPU Implementation of
the Inverse Fast Multipole Method for Multi-Bistatic Imaging Applications.” Journal of Applied Com-putational Electromagnetics Society. In review.
C. Peer Reviewed Conference Proceedings
1. A. Molaei, G. Ghazi, J. Heredia, H. Gomez-Sousa, and J. A. Martinez-Lorenzo. High Capacity Imaging Using an Array of Compressive Reflector Antennas. CD Proc., EuCAP 2017 — X European Conference on Antennas and Propagation, Paris, France, March, 2017.
2. Martinez-Lorenzo, J.A., Alvarez Lopez, Y. “Compressed Sensing Techniques for Ultrasonic Imaging of Cargo Containers.” CD Proc., ASME 2016 — International Mechanical Engineering Congress and Exposition, Phoenix, AZ, November 2016.
3. Bisulco, A., Tirado, L., Patel, S., Annese, L., Ghazi, G., & Martinez-Lorenzo, J.A. “Massive MIMO Millime-ter Wave Radar Imaging System.” AP-S 2016— IEEE AP-S International Symposium, Fajardo, Puerto Rico, July 2016.
4. Obermeier, R., & Martinez-Lorenzo, J.A. “Physicality Constrained Compressive Sensing Algorithm for Electromagnetic Imaging Applications.” AP-S 2016—IEEE AP-S International Symposium, Fajardo, Puerto Rico, July 2016.
D. Other Presentations
1. Seminarsa. Martinez-Lorenzo, J.A. “Mm-wave Imaging.” NU Meeting with Analogic, Northeastern University,
Boston, MA, 14 September 2016. b. Martinez-Lorenzo, J.A. “Secure Communications, Sensing, Imaging & Through New Materials.”
NU Meeting with ADT, Northeastern University, Boston, MA, 14 September 2016. c. Martinez-Lorenzo, J.A. “Research at the SICA-Lab.” NU-ALERT Gordon Scholars Program, North-
eastern University, Boston, MA, 16 September 2016.d. Martinez- Lorenzo, J.A. “Next Generation Multi-Coded Compressive Systems for High-Capacity
Sensing and Imaging Applications.” Math Department at NU, 06 December 2016.2. Poster Sessions
a. Bisulco, A., Molaei, A., Tirado, L., Ghazi, G., & Martinez-Lorenzo, J.A. “High Capacity Millimeter Wave Sensing for Quasi-Real-Time Imaging,” RISE: 2016, Northeastern University, Boston, MA, 7 April 2017.
3. Interviews and/or News Articles a. Choe, Jonathan. (April 18, 2017). “Northeastern University Professor Pioneers New Security
Technology.” NBC. http://www.nbcboston.com/news/local/Northeastern-University-Profes-sor-Pioneers-New-Security-Technology-419776403.html
b. Vasel, Kathryn. (June 3, 2016). “Is this the future of airport security?” CNN. http://money.cnn.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

com/2016/06/03/pf/airport-security-checkpoints/
V. REFERENCES
[1] J. Yinon, “Field detection and monitoring of explosives,” Trends in analytical chemistry, vol. 21, no. 4, pp. 415–423, 2002.
[2] J. Yinon, Forensic and Environmental Detection of Explosives. Chichester: John Wiley and Sons, 1999.[3] M. Leahy-Hoppa, M. Fitch, X. Zheng, L. Hayden, and R. Osiander, “Wideband terahertz spectroscopy of
explosives,” Chemical Physics Letters, vol. 424, no. 8, pp. 227–230, 2007.[4] D. J. Cook, B. K. Decker, and M. G. Allen, “Quantitative thz spectroscopy of explosive materials,” in Optical
Terahertz Sicience and Technology, Orlando, Florida, 14-16 March, 2005.[5] H. Liu, Y. Chen, G. J. Bastiaans, and X. Zhang, “Detection and identification of explosive rdx by thz diffuse
reflection spectroscopy,” Optics Express, vol. 14, pp. 415–423, 1 2006.[6] P. Shea, T. Gozani, and H. Bozorgmanesh, “A tnt explosives-detection system in airline baggage,” Nuclear
Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment, vol. 299, no. 20, pp. 444–448, December 1990.
[7] C. L. Fink, B. J. Micklich, T. J. Yule, P. Humm, L. Sagalovsky, and M. M. Martin, “Nuclear instruments and methods in physics research section b: Beam interactions with materials and atoms,” Evaluation of neu-tron techniques for illicit substance detection, vol. 99, no. 1-4, pp. 748–752, May 1995.
[8] H. Itozaki and G. Ota, “International journal on smart sensing and intelligent system,” Nuclear quadru-pole resonance for explosive detection, vol. 1, no. 3, pp. 705–715, September 2008.
[9] J. B. Miller and G. A. Barral, “Explosives detection with nuclear quadrupole resonance,” American Scien-tist, vol. 93, pp. 50–57, January-February 2005.
[10] Y. Alvarez, J. A. Martinez-Lorenzo, F. Las-Heras, and C. M. Rappaport, “An inverse fast multipole method for geometry reconstruction using scattered field information,” Antennas and Propagation, IEEE Trans-actions on, vol. 60, no. 7, pp. 3351–3360, 2012.
[11] J. Martinez-Lorenzo, J. Heredia Juesas, and W. Blackwell, “A single transceiver compressive reflector an-tenna for high-sensing-capacity imaging,” Antennas and Wireless Propagation Letters, IEEE, vol. PP, no. 99,pp. 1–1, 2015.
[12] J. Heredia Juesas, G. Allan, A. Molaei, L. Tirado, W. Blackwell, and J. Martinez Lorenzo, “Consensus based imaging using admm for a compressive reflector antenna,” in Antennas and Propagation & USNC/URSI National Radio Science Meeting, 2015 IEEE International Symposium on. IEEE, 2015, pp. 1304–1305.
[13] R. Obermeier and J. A. Martinez-Lorenzo, “Physicality constrained compressive sensing algorithm for electromagnetic imaging applications,” in Antennas and Propagation (APSURSI), 2016 IEEE Internation-al Symposium, 2016
[14] R. Obermeier and J. A. Martinez-Lorenzo, “Sensing Matrix Design via Mutual Coherence Minimization for Electromagnetic Compressive Imaging Applications,” IEEE Transactions on Computational Imaging, vol. 3, no. 2, pp. 217-229, 2017.
[15] G. Lockwood and F. S. Foster, “Optimizing sparse two-dimensional transducer arrays using an effective aperture approach,” in Ultrasonics Symposium, 1994. Proceedings., 1994 IEEE, vol. 3. IEEE, 1994, pp. 1497–1501.
[16] S. S. Ahmed, A. Schiess, and L.-P. Schmidt, “Near field mm-wave imaging with multistatic sparse 2d-ar-rays,” in 2009 European Radar Conference (EuRAD), 2009.
[17] C. Watts, “Metamaterials and their applications towards novel imaging technologies,” Ph.D. dissertation, PhD Thesis,
[18] 2015.[19] T. Sleasman, M. Boyarsk, M. F. Imani, J. N. Gollub, and D. R. Smith, “Design considerations for a dynamic
metamaterial aperture for computational imaging at microwave frequencies,” JOSA B, vol. 33, no. 6, pp. 1098–1111, 2016.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

[20] E. Byron, “Radar principles, technology, applications,” Englewood Cliffs, New Jersey: PTR Prentice hall, pp. 618–627, 1993.
[21] S. S. Ahmed, A. Schiessl, and L.-P. Schmidt, “Multistatic mm-wave imaging with planar 2d-arrays,” in 2009 German Microwave Conference. IEEE, 2009, pp. 1–4.
ALERT Phase 2 Year 4 Annual Report
Appendix A: Project Reports Thrust R3: Bulk Sensors & Sensor Systems
Project R3-B.2

This page intentionally left blank.