Embed Size (px)
Citation preview
Projective cameras
• Motivation• Elements of Projective Geometry• Projective structure from motion
Planches :– http://www.di.ens.fr/~ponce/geomvis/lect3.ppt
– http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
Weak-Perspective Projection Model
r(p and P are in homogeneous coordinates)
p = A P + b (neither p nor P is in hom. coordinates)
p = M P (P is in homogeneous coordinates)
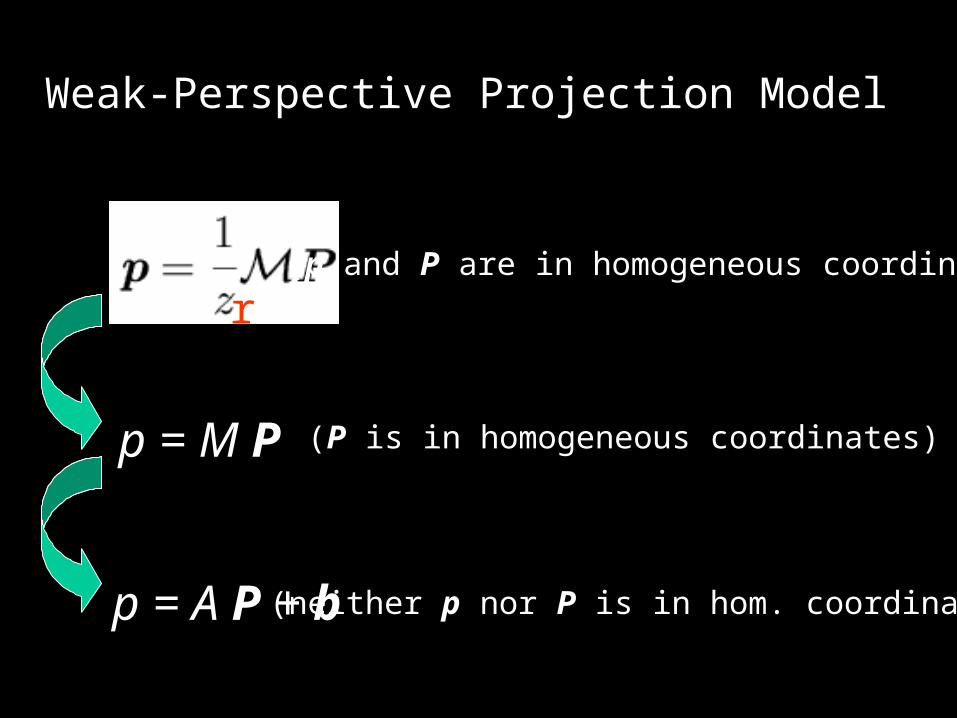
Affine Spaces: (Semi-Formal) Definition
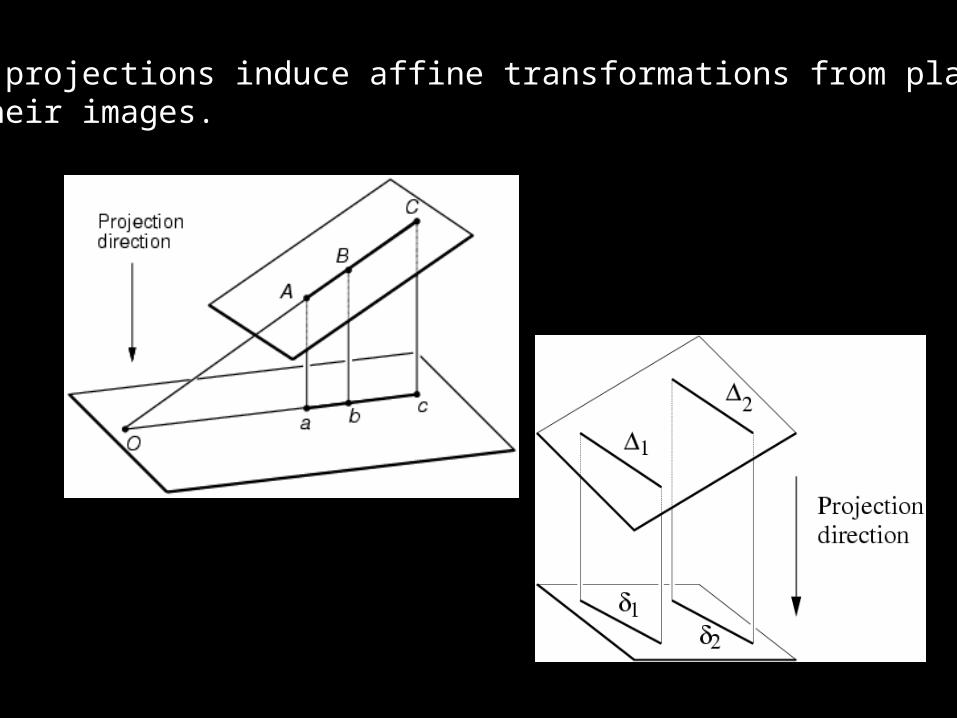
Affine projections induce affine transformations from planesonto their images.
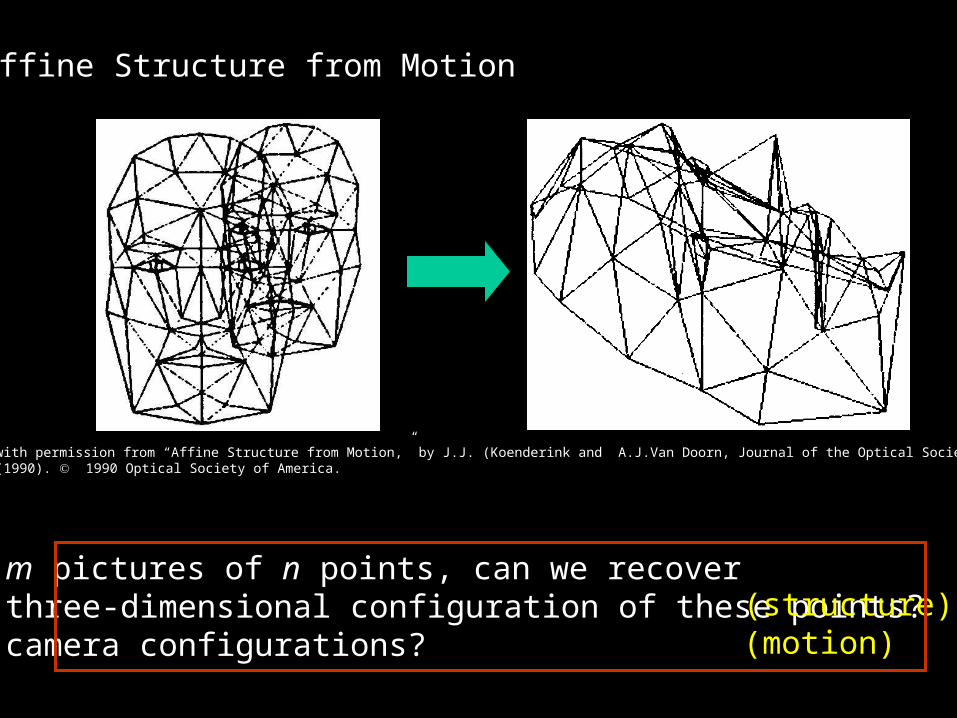
Affine Structure from Motion
Reprinted with permission from “Affine Structure from Motion,” by J.J. (Koenderink and A.J.Van Doorn, Journal of the Optical Society of America A,8:377-385 (1990). 1990 Optical Society of America.
Given m pictures of n points, can we recover• the three-dimensional configuration of these points?• the camera configurations?
(structure)(motion)
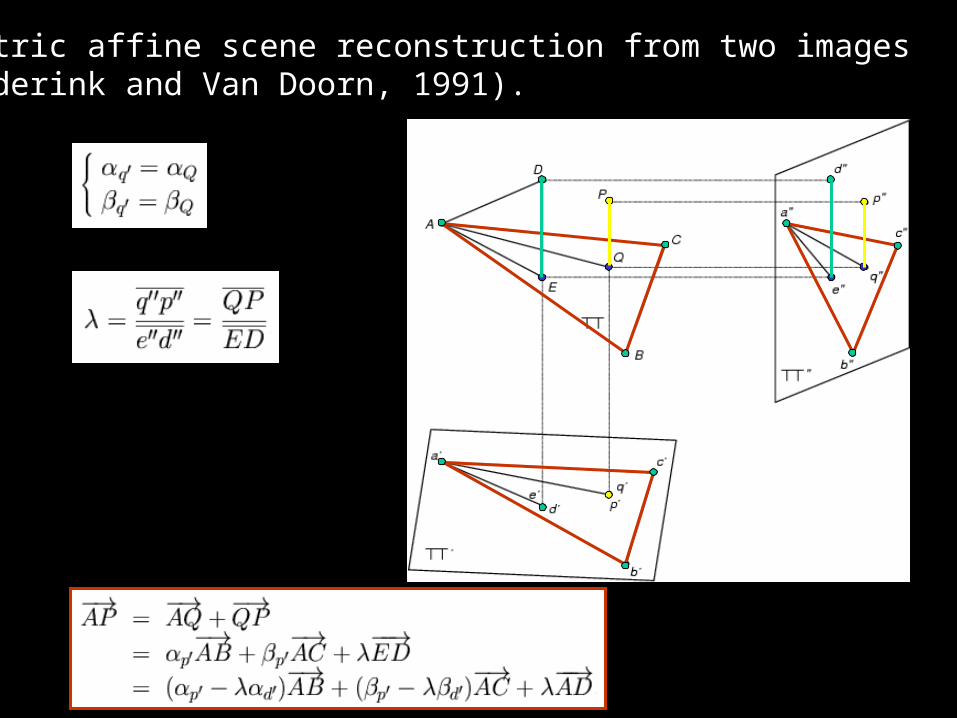
Geometric affine scene reconstruction from two images(Koenderink and Van Doorn, 1991).
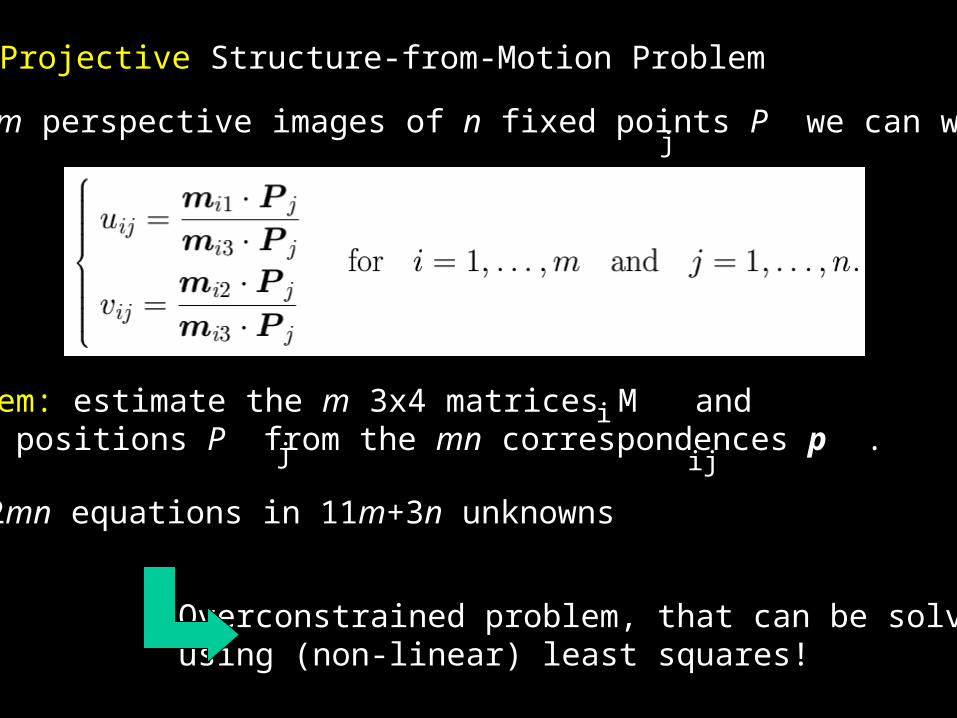
The Projective Structure-from-Motion Problem
Given m perspective images of n fixed points P we can write
Problem: estimate the m 3x4 matrices M andthe n positions P from the mn correspondences p .
i
j ij
2mn equations in 11m+3n unknowns
Overconstrained problem, that can be solvedusing (non-linear) least squares!
j
The Projective Ambiguity of Projective SFM
If M and P are solutions, i j
So are M’ and P’ wherei j
and Q is an arbitrary non-singular 4x4 matrix.
When the intrinsic and extrinsic parameters are unknown
Q is a projective transformation.
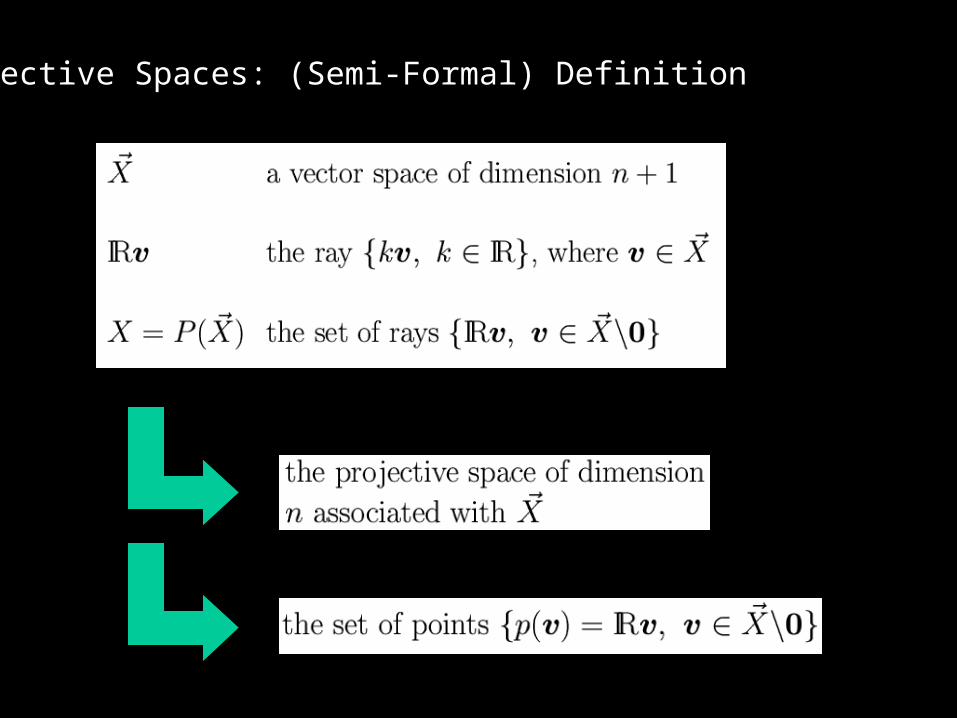
Projective Spaces: (Semi-Formal) Definition
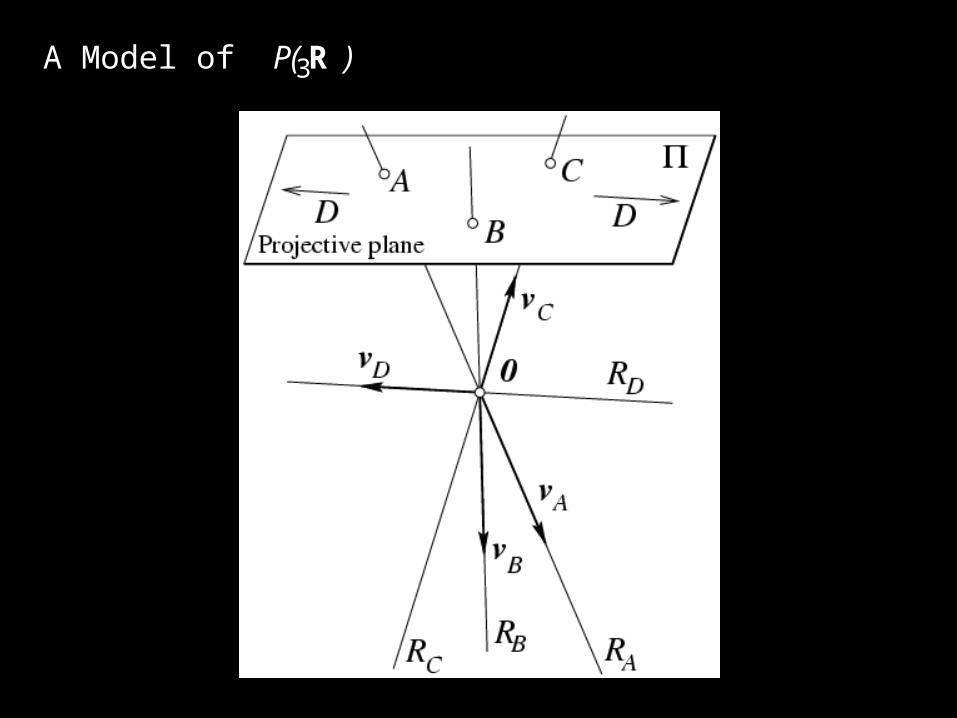
A Model of P( R )3
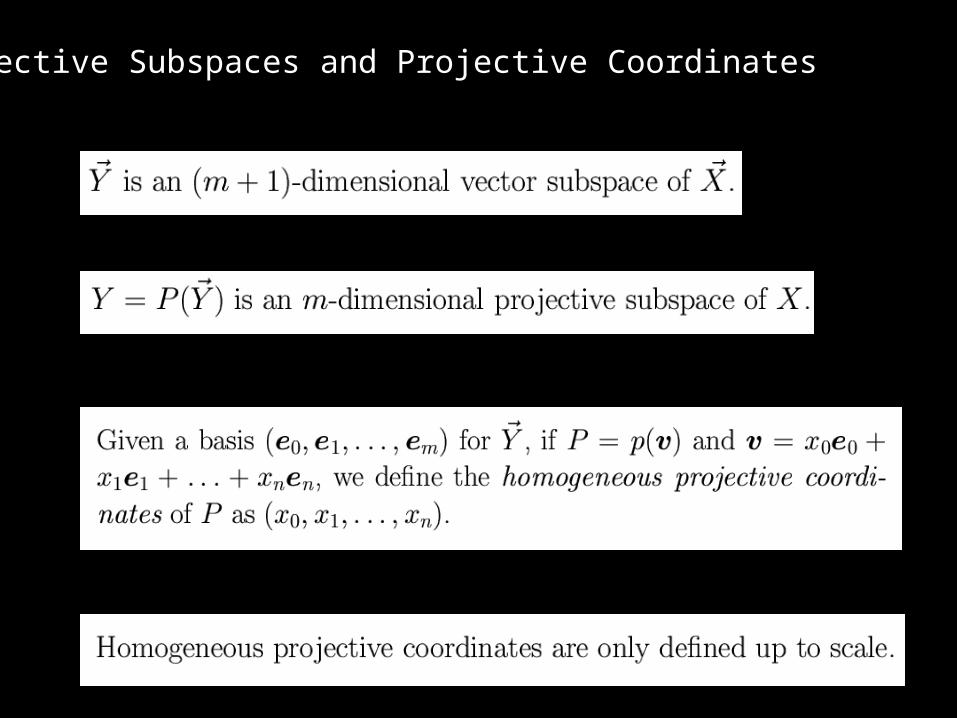
Projective Subspaces and Projective Coordinates
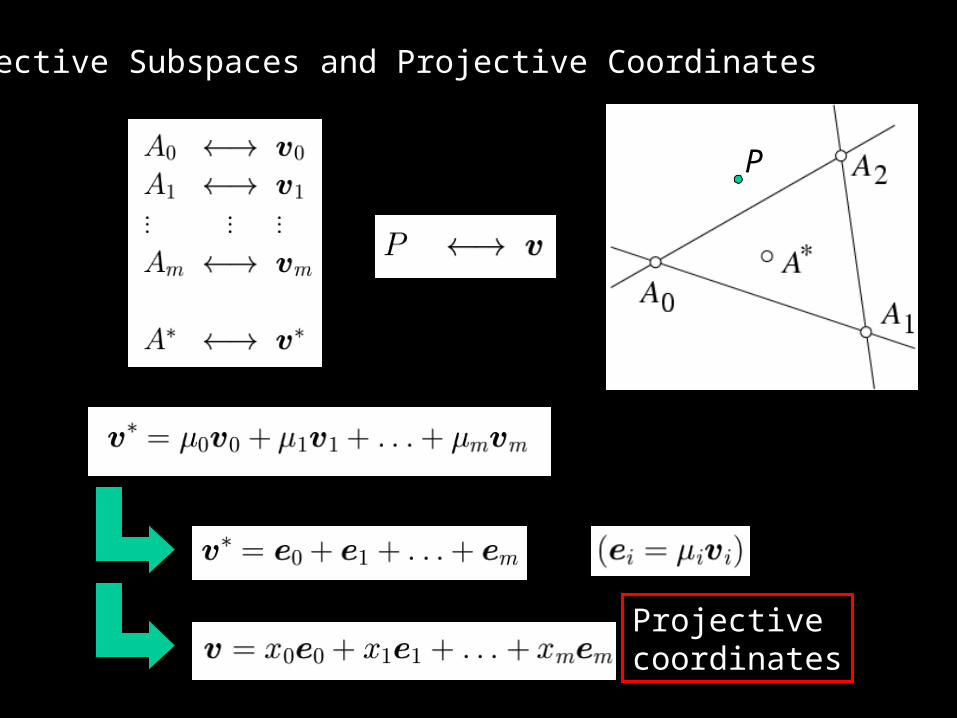
Projective Subspaces and Projective Coordinates
Projectivecoordinates
P
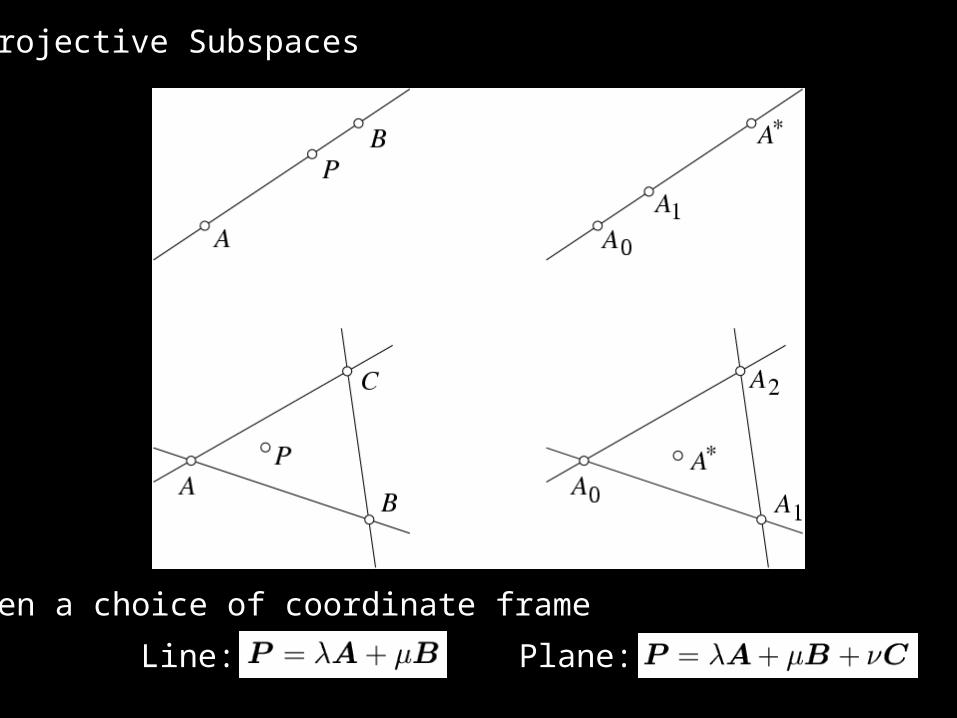
Projective Subspaces
Given a choice of coordinate frame
Line: Plane:
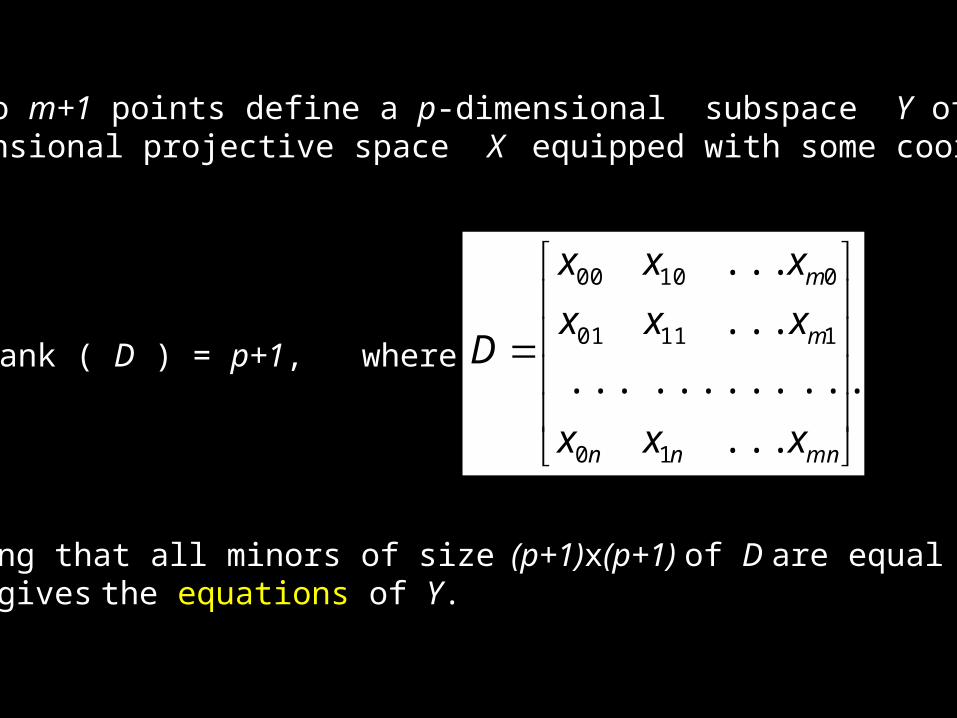
When do m+1 points define a p-dimensional subspace Y of ann-dimensional projective space X equipped with some coordinateframe?
Writing that all minors of size (p+1)x(p+1) of D are equal tozero gives the equations of Y.
Rank ( D ) = p+1, where
mnnn
m
m
xxx
xxx
xxx
D
...
............
...
...
10
11101
01000
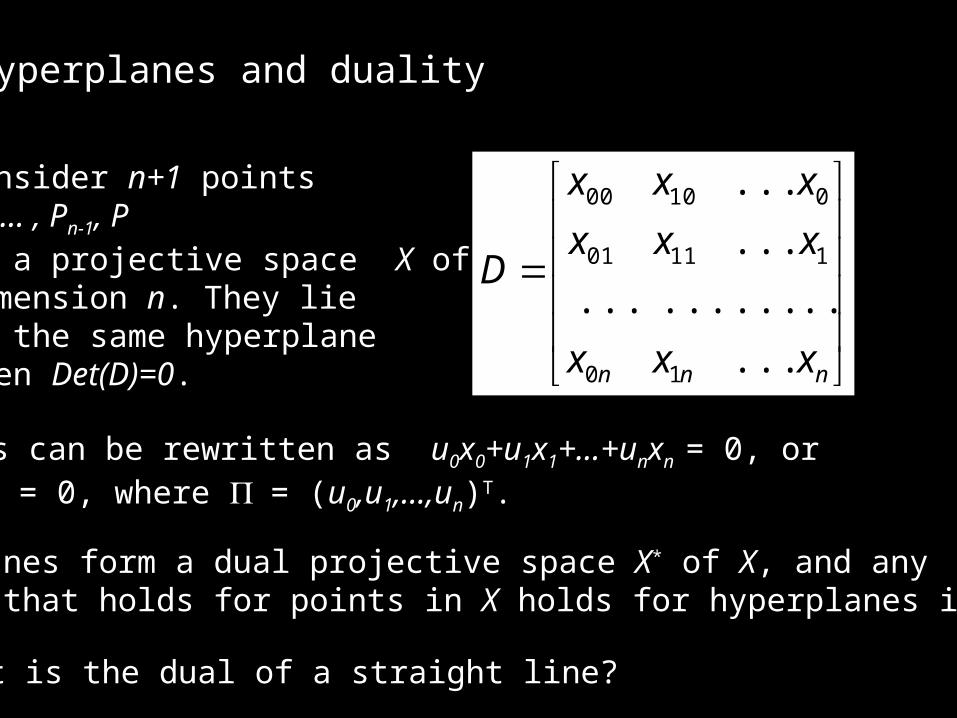
Hyperplanes and duality
This can be rewritten as u0x0+u1x1+…+unxn = 0, orT P = 0, where = (u0,u1,…,un)T.
Consider n+1 points P0, … , Pn-1, P in a projective space X ofdimension n. They liein the same hyperplanewhen Det(D)=0.
nnn xxx
xxx
xxx
D
...
............
...
...
10
11101
01000
Hyperplanes form a dual projective space X* of X, and anytheorem that holds for points in X holds for hyperplanes in X*.
What is the dual of a straight line?
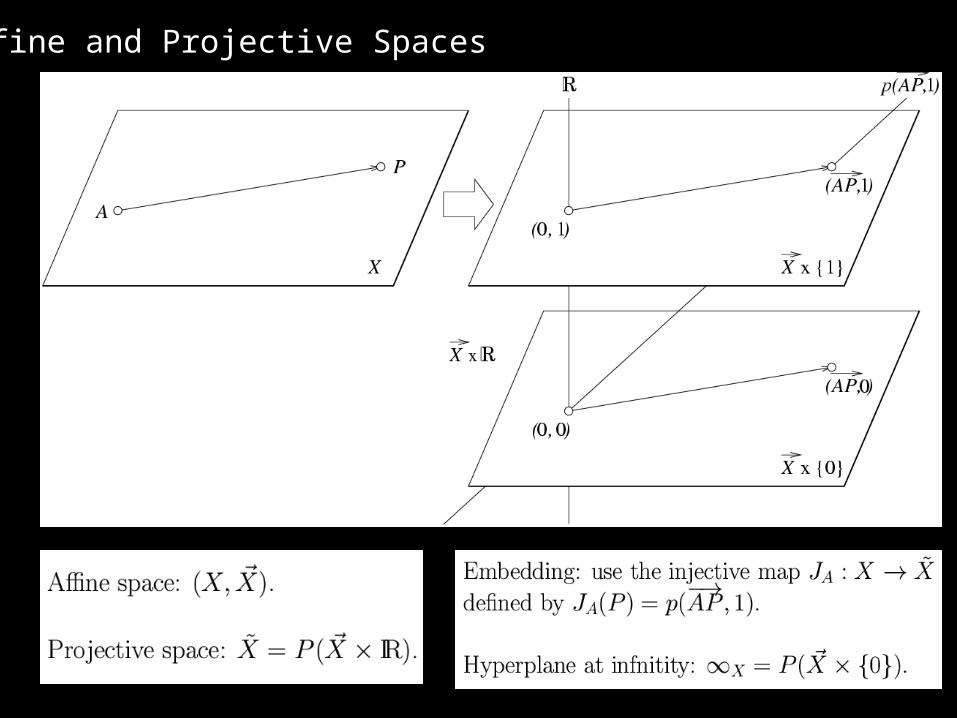
Affine and Projective Spaces
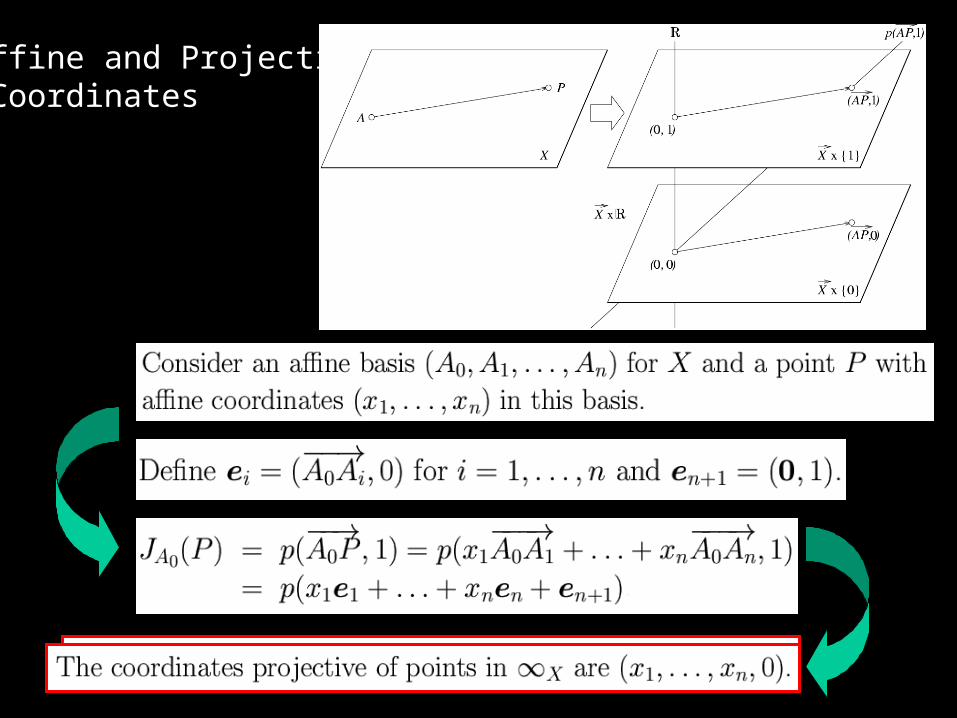
Affine and Projective Coordinates
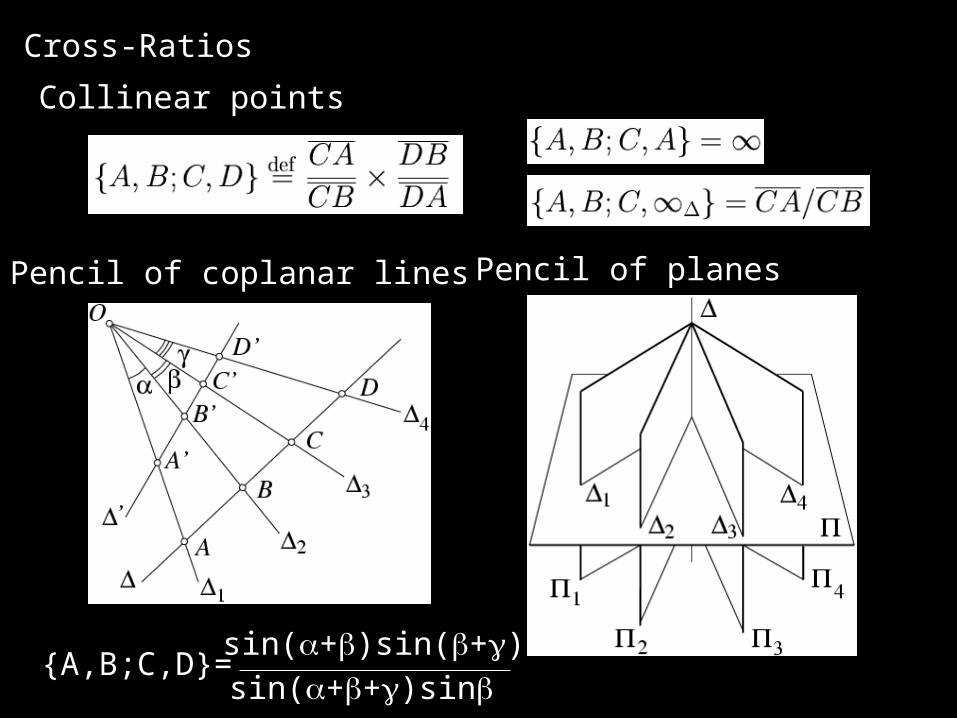
Cross-Ratios
Collinear points
Pencil of coplanar lines Pencil of planes
{A,B;C,D}=sin(+)sin(+)
sin(++)sin
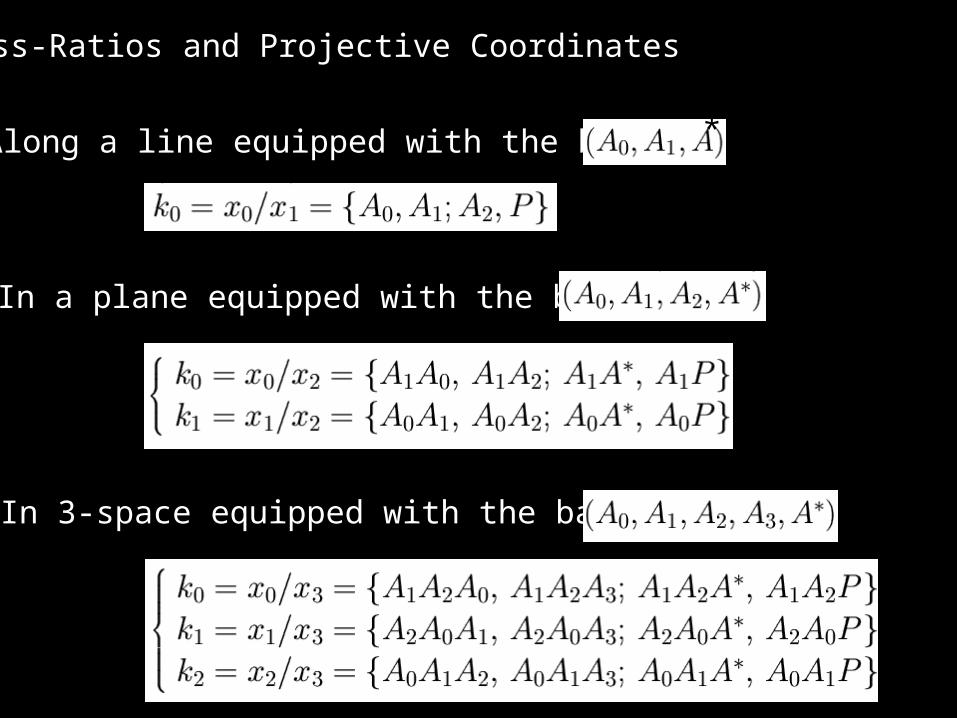
Cross-Ratios and Projective Coordinates
Along a line equipped with the basis
In a plane equipped with the basis
In 3-space equipped with the basis
*
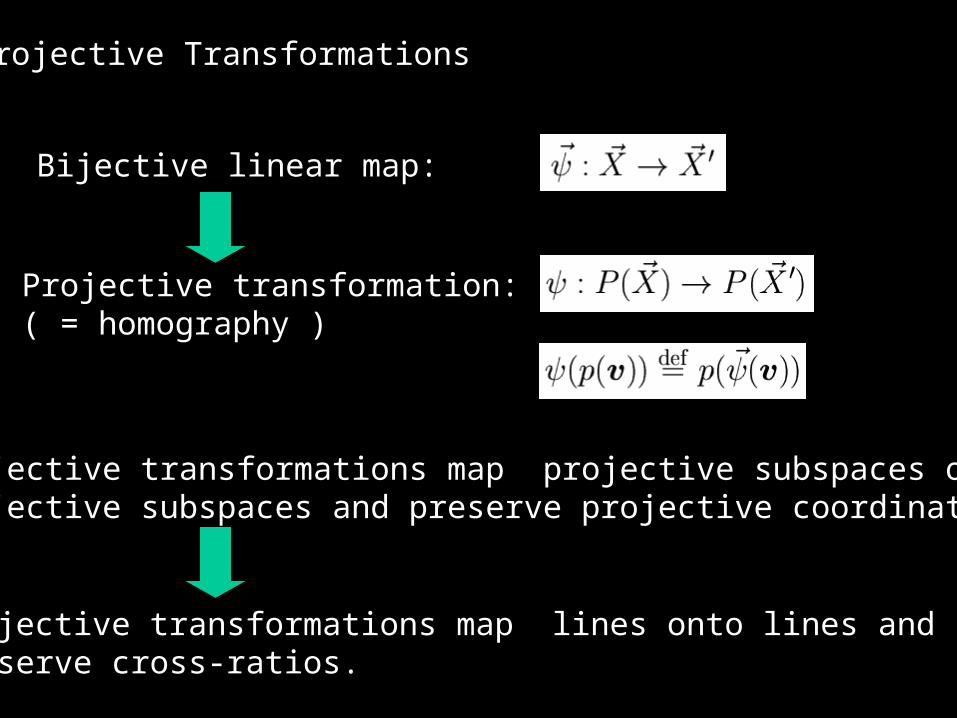
Projective Transformations
Bijective linear map:
Projective transformation:( = homography )
Projective transformations map projective subspaces ontoprojective subspaces and preserve projective coordinates.
Projective transformations map lines onto lines andpreserve cross-ratios.
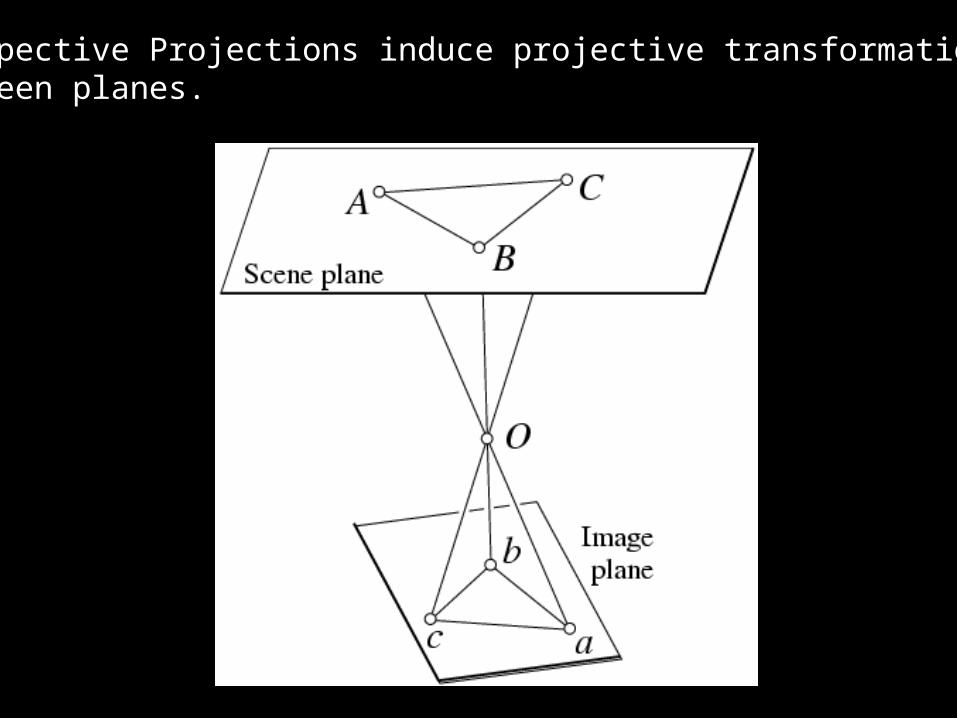
Perspective Projections induce projective transformationsbetween planes.
Projective Shape
Two point sets S and S’ in some projective space X are projectively equivalent when there exists a projective transformation : X X such that S’ = ( S ).
Projective structure from motion = projective shape recovery.
= recovery of the corresponding motion equivalence classes.
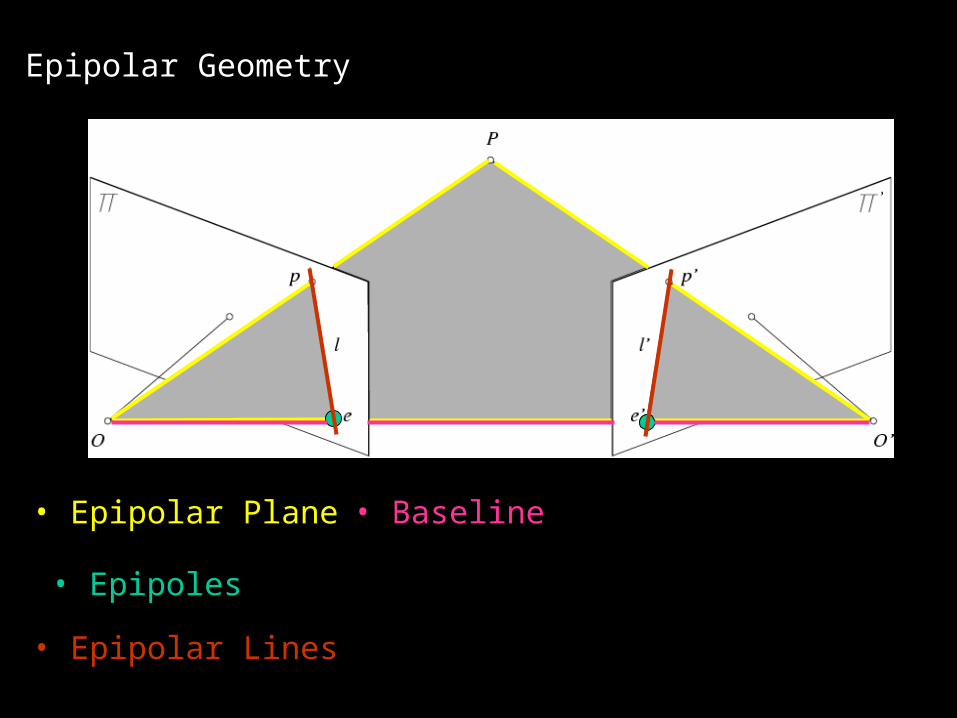
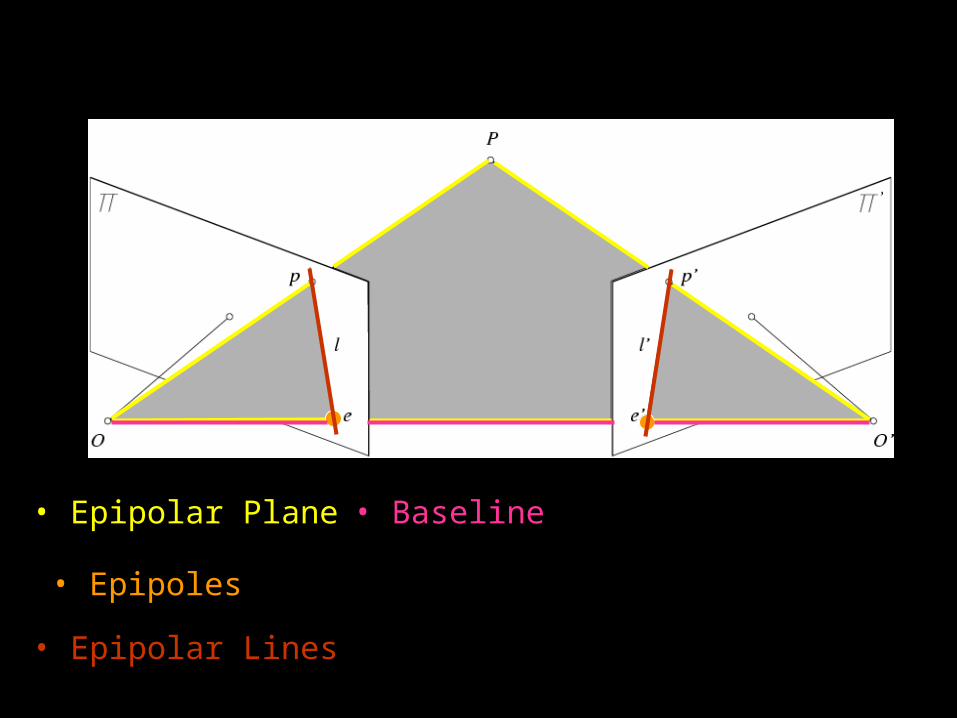
Epipolar Geometry
• Epipolar Plane
• Epipoles
• Epipolar Lines
• Baseline
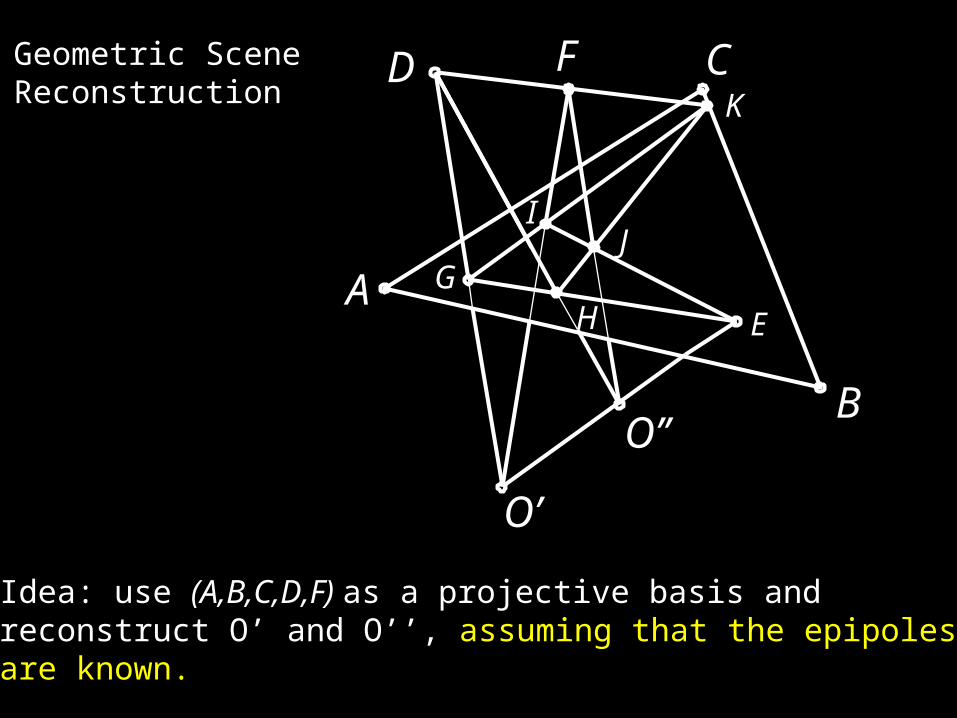
Geometric SceneReconstruction
Idea: use (A,B,C,D,F) as a projective basis and reconstruct O’ and O’’, assuming that the epipolesare known.
A
B
CD F
GH
IJ
K
E
O’
O’’
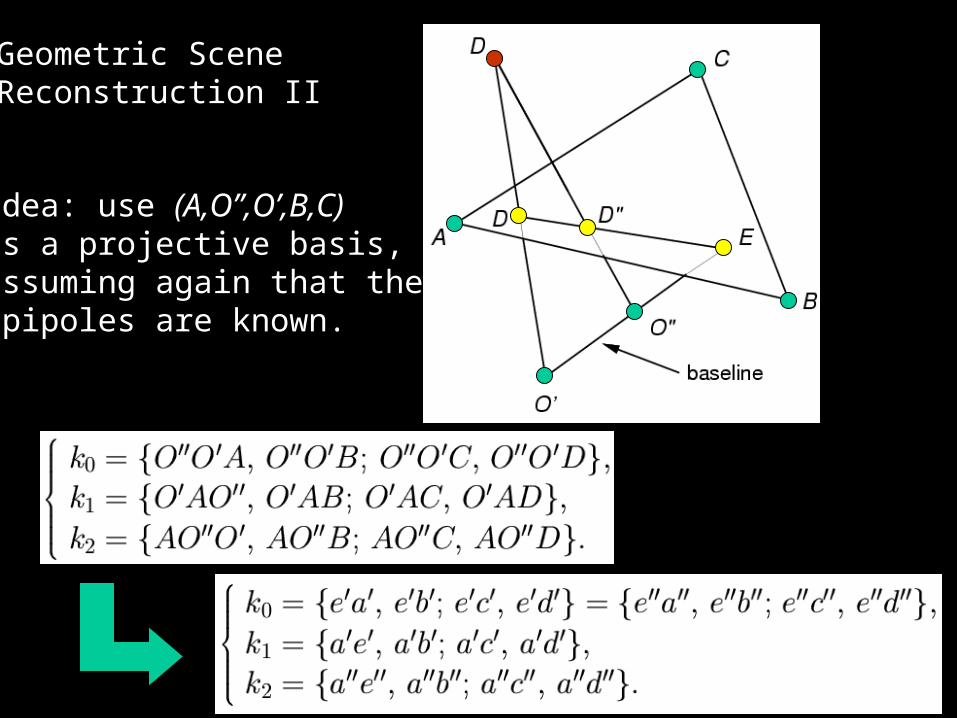
Geometric SceneReconstruction II
Idea: use (A,O”,O’,B,C)as a projective basis, assuming again that theepipoles are known.
Multi-View Geometry
• Epipolar Geometry
• The Essential Matrix
• The Fundamental Matrix
Epipolar Geometry
• Epipolar Plane
• Epipoles
• Epipolar Lines
• Baseline
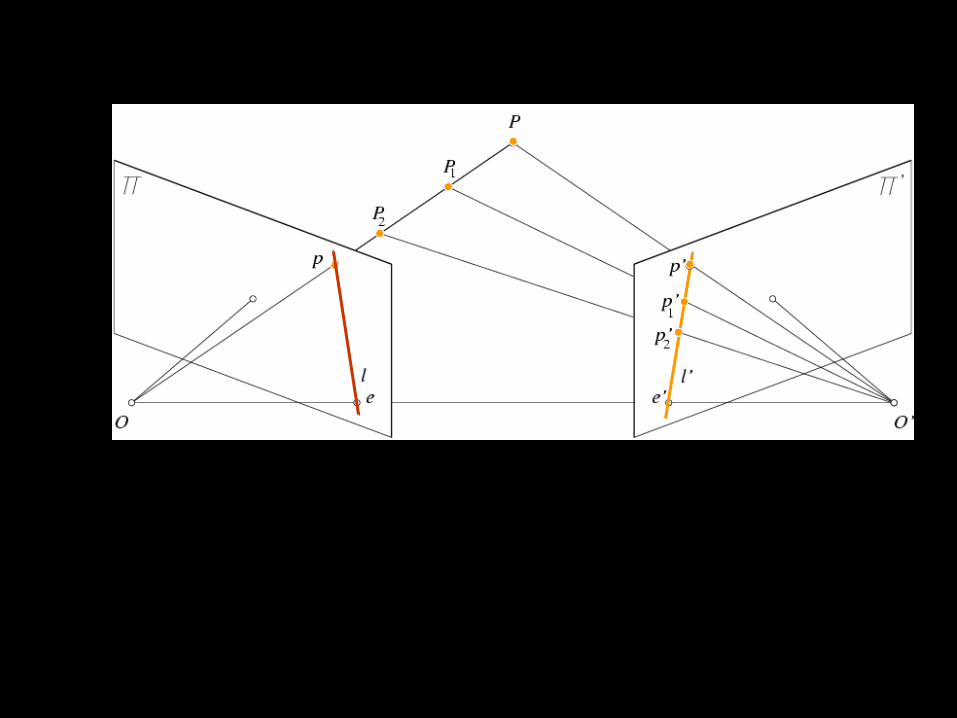
Epipolar Constraint
• Potential matches for p have to lie on the corresponding epipolar line l’.
• Potential matches for p’ have to lie on the corresponding epipolar line l.
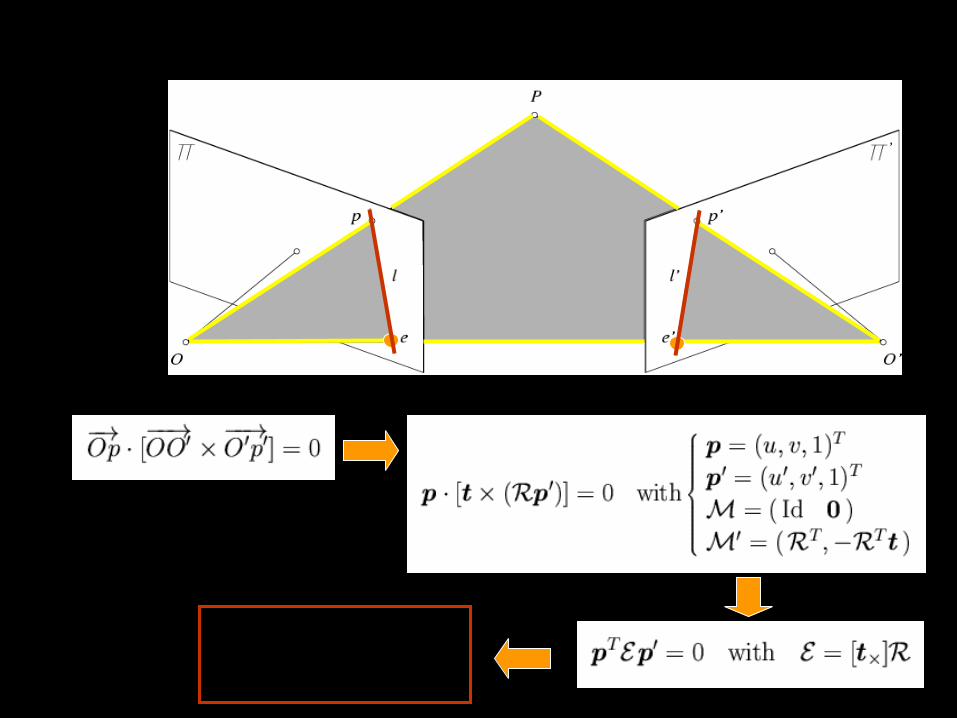
Epipolar Constraint: Calibrated Case
Essential Matrix(Longuet-Higgins, 1981)
Properties of the Essential Matrix
• E p’ is the epipolar line associated with p’.
• E p is the epipolar line associated with p.
• E e’=0 and E e=0.
• E is singular.
• E has two equal non-zero singular values (Huang and Faugeras, 1989).
T
T
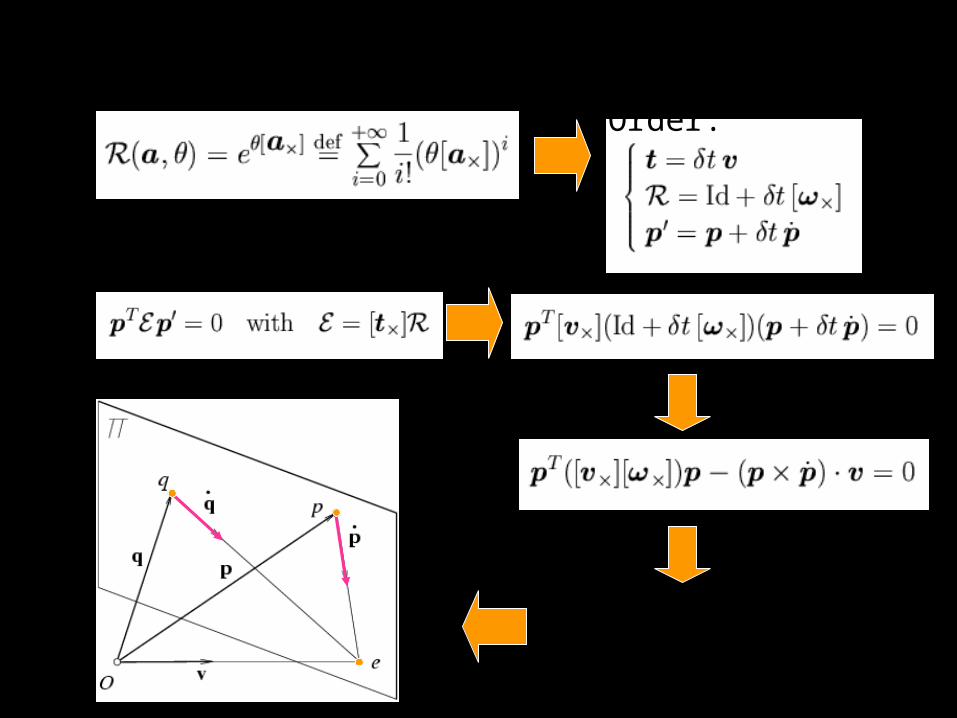
Epipolar Constraint: Small MotionsTo First-Order:
Pure translation:Focus of Expansion
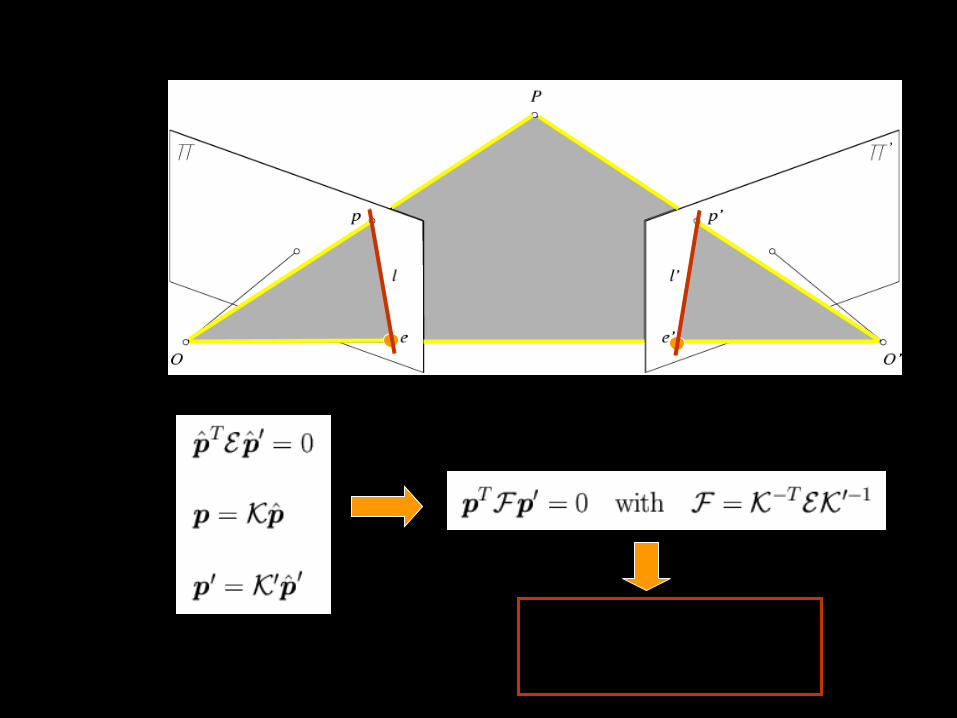
Epipolar Constraint: Uncalibrated Case
Fundamental Matrix(Faugeras and Luong, 1992)
Properties of the Fundamental Matrix
• F p’ is the epipolar line associated with p’.
• F p is the epipolar line associated with p.
• F e’=0 and F e=0.
• F is singular.
T
T
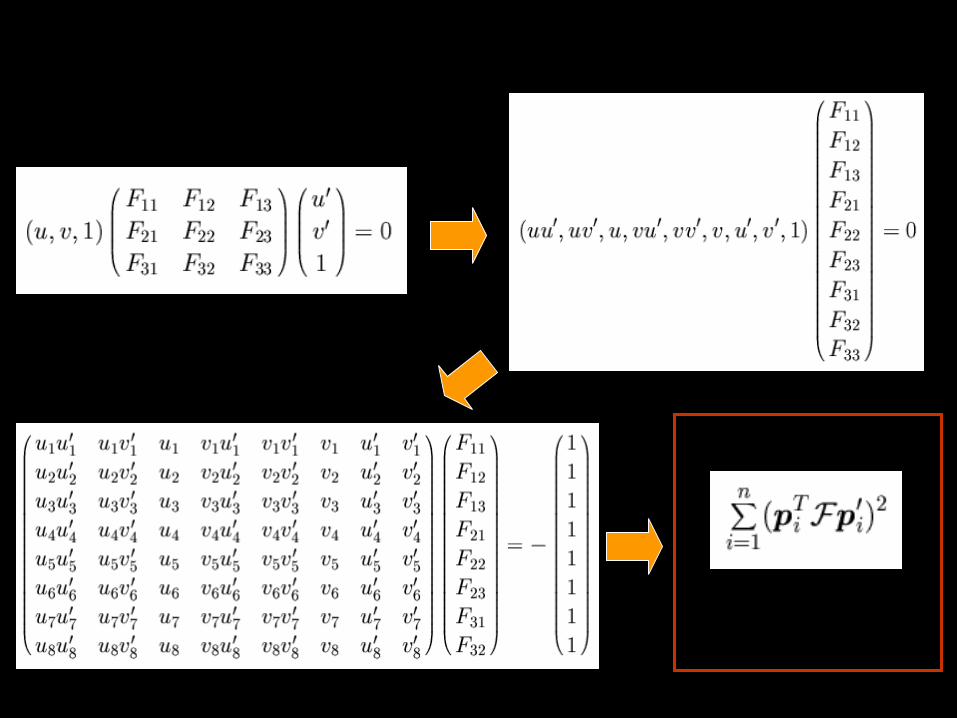
The Eight-Point Algorithm (Longuet-Higgins, 1981)
|F | =1.
Minimize:
under the constraint2
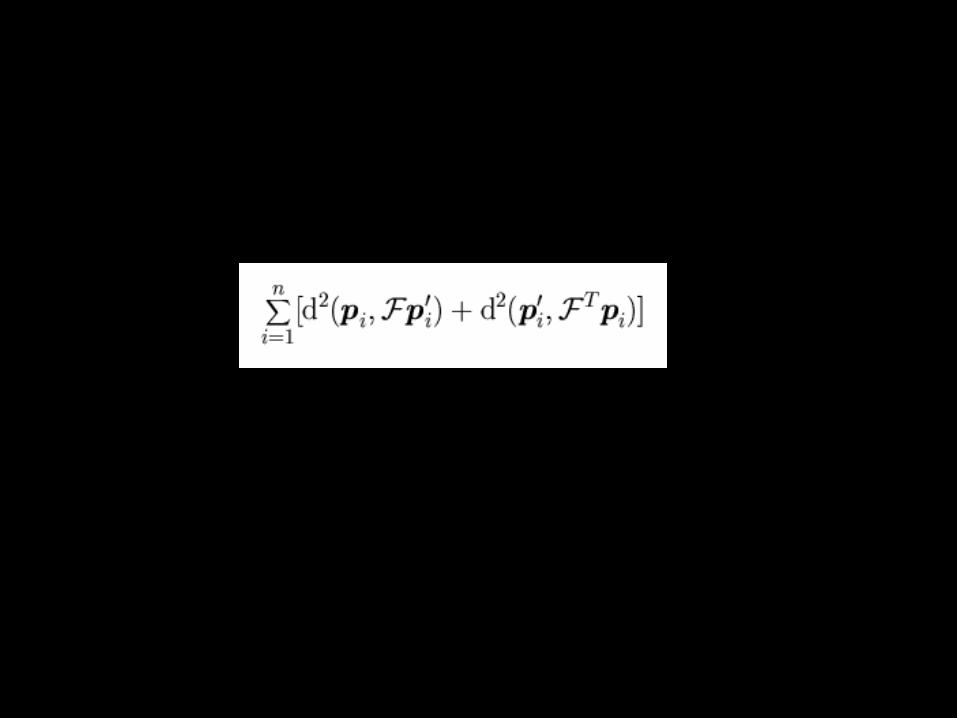
Non-Linear Least-Squares Approach (Luong et al., 1993)
Minimize
with respect to the coefficients of F , using an appropriate rank-2 parameterization.
The Normalized Eight-Point Algorithm (Hartley, 1995)
• Center the image data at the origin, and scale it so themean squared distance between the origin and the data points is 2 pixels: q = T p , q’ = T’ p’.
• Use the eight-point algorithm to compute F from thepoints q and q’ .
• Enforce the rank-2 constraint.
• Output T F T’.T
i i i i
i i
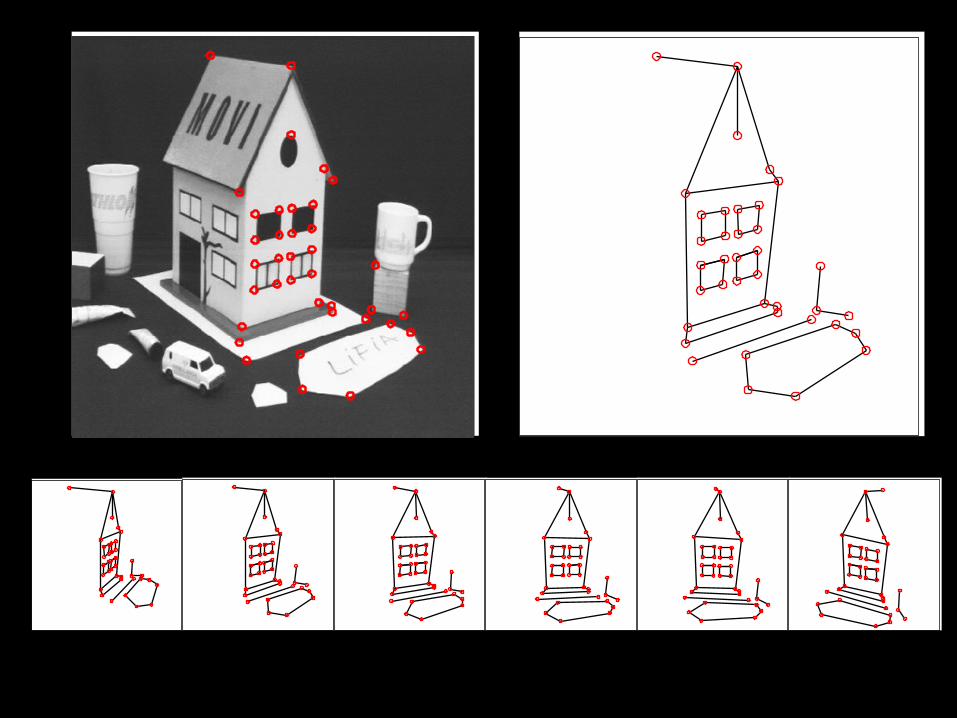
Data courtesy of R. Mohr and B. Boufama.
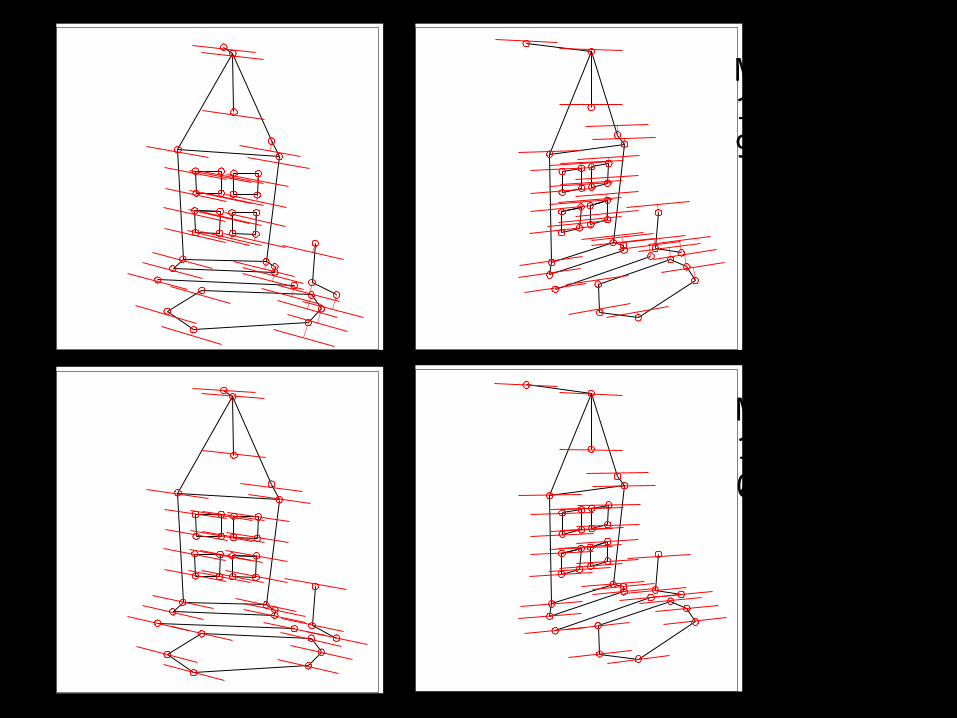
Wit
hout
nor
mal
izat
ion
Wit
h no
rmal
izat
ion
Mean errors:10.0pixel9.1pixel
Mean errors:1.0pixel0.9pixel
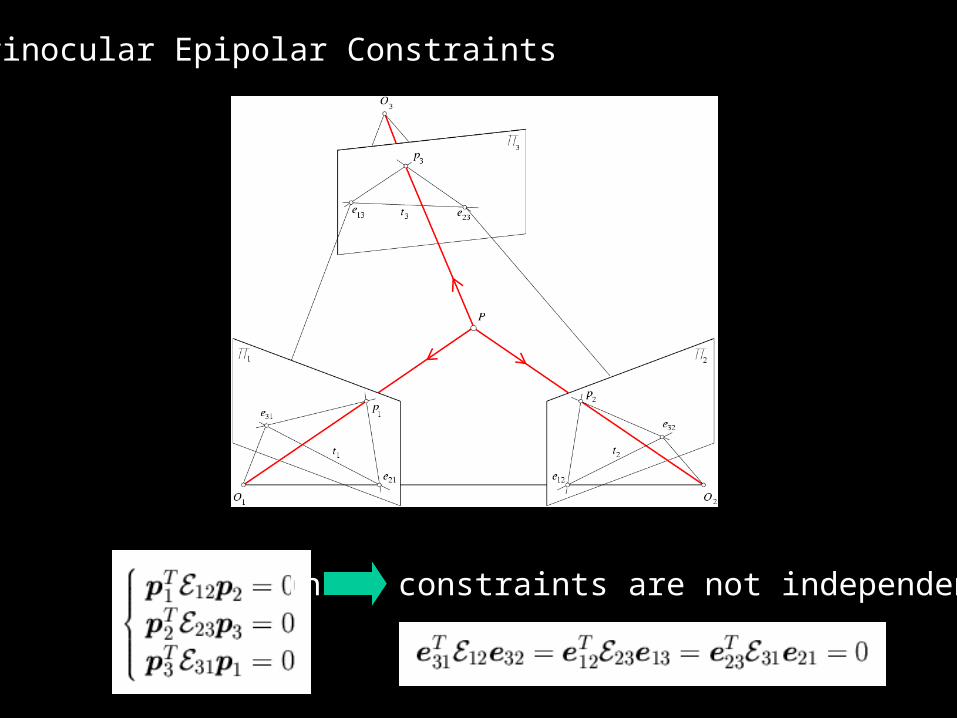
Trinocular Epipolar Constraints
These constraints are not independent!
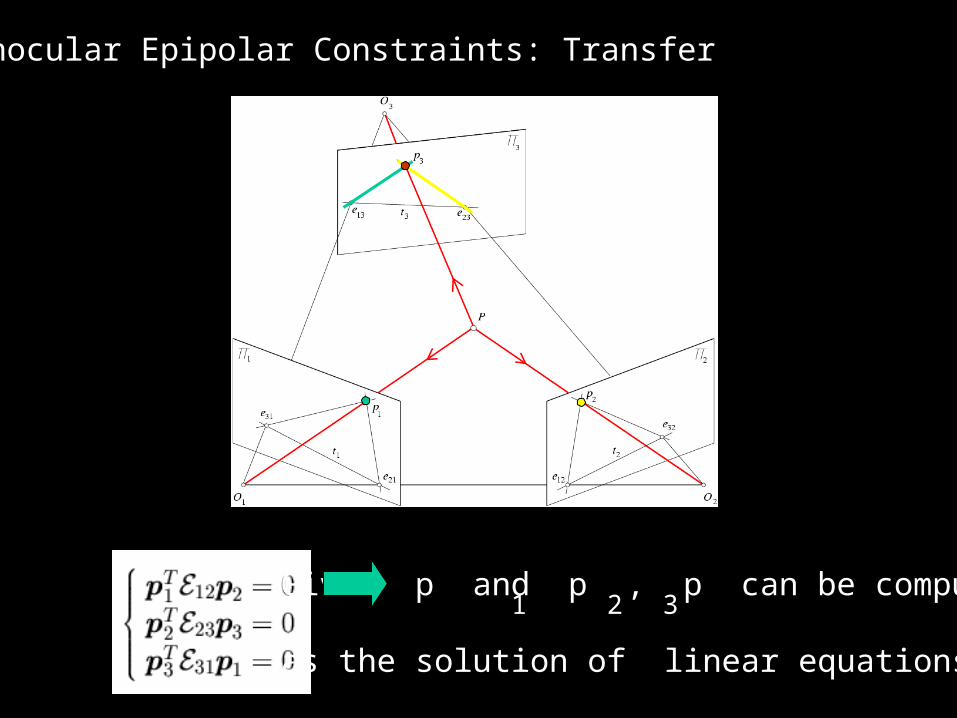
Trinocular Epipolar Constraints: Transfer
Given p and p , p can be computed
as the solution of linear equations.
1 2 3
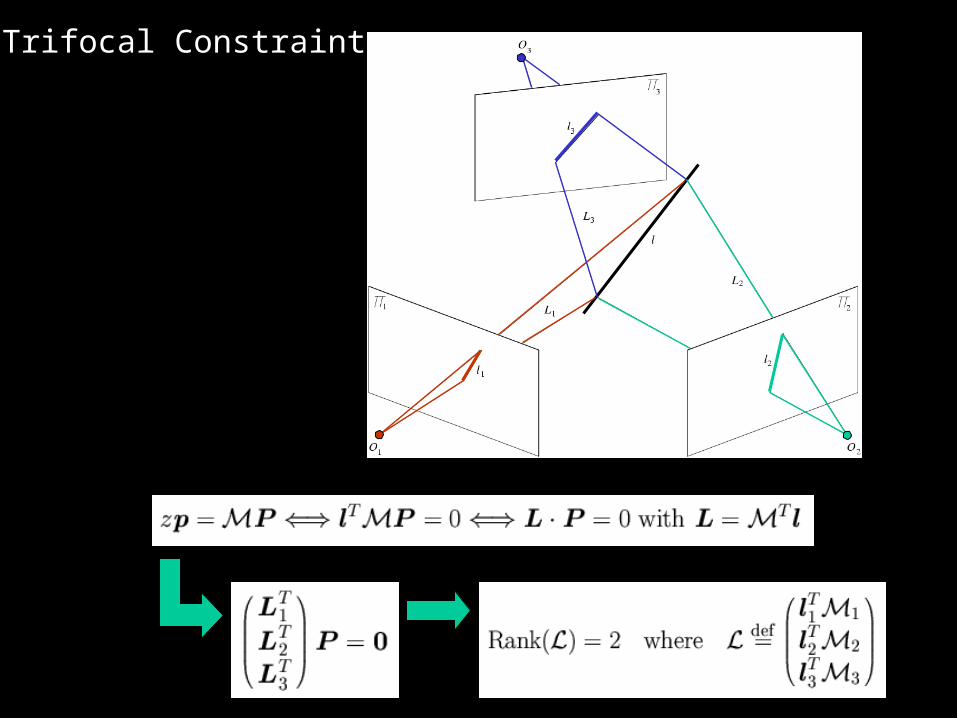
Trifocal Constraints
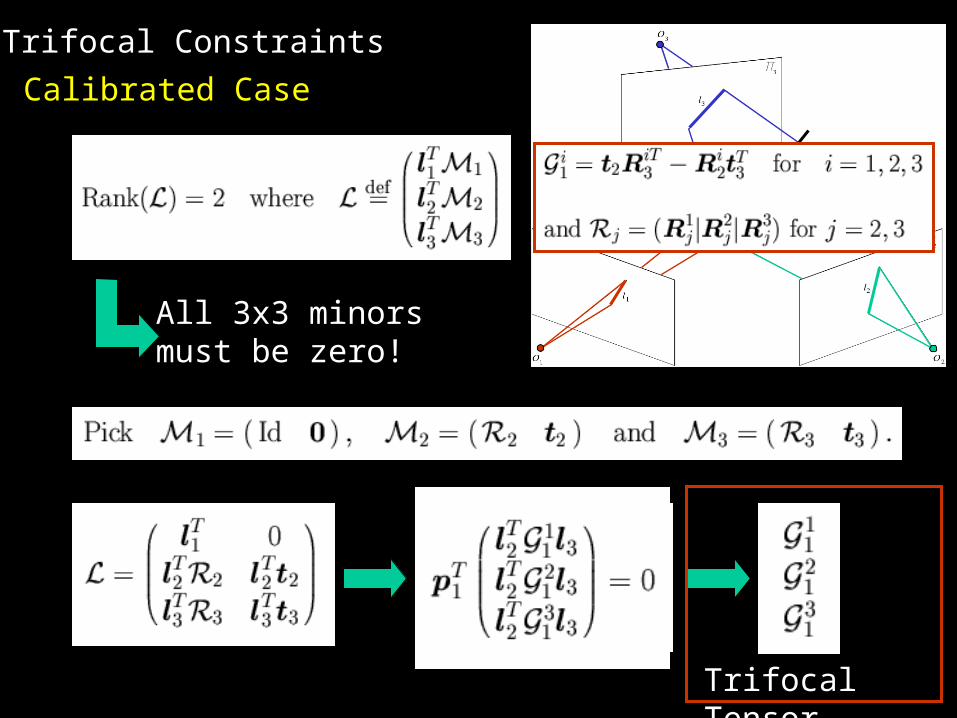
Trifocal Constraints
All 3x3 minorsmust be zero!
Calibrated Case
Trifocal Tensor
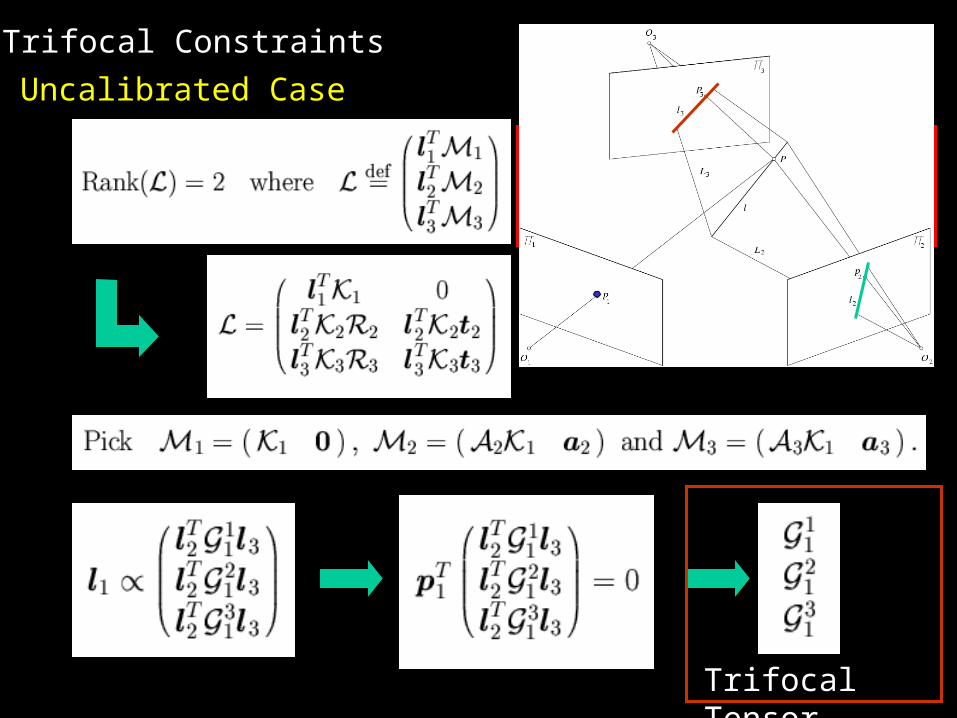
Trifocal Constraints
Uncalibrated Case
Trifocal Tensor
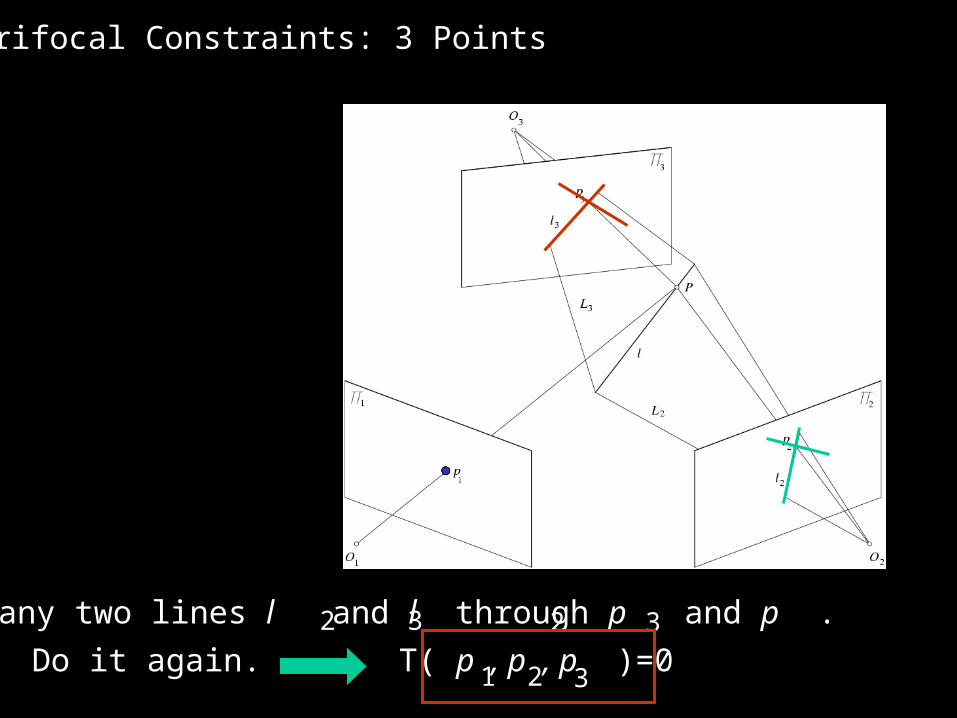
Trifocal Constraints: 3 Points
Pick any two lines l and l through p and p .
Do it again.2 3 2 3
T( p , p , p )=01 2 3
Properties of the Trifocal Tensor
Estimating the Trifocal Tensor
• Ignore the non-linear constraints and use linear least-squaresa posteriori.
• Impose the constraints a posteriori.
• For any matching epipolar lines, l G l = 0.
• The matrices G are singular.
• They satisfy 8 independent constraints in theuncalibrated case (Faugeras and Mourrain, 1995).
2 1 3T i
1i
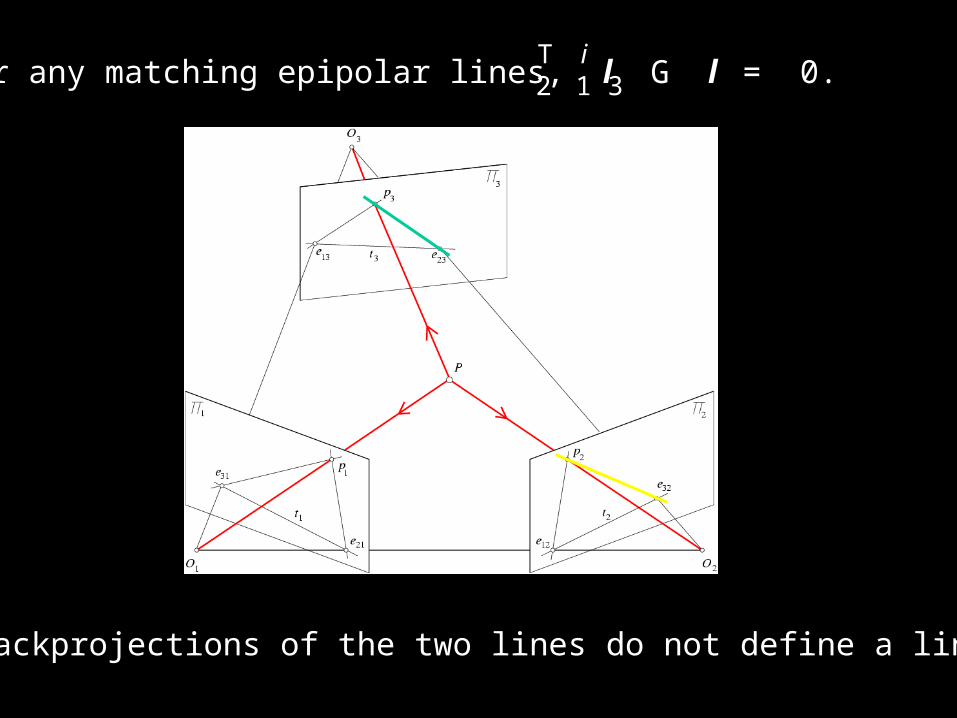
For any matching epipolar lines, l G l = 0. 2 1 3T i
The backprojections of the two lines do not define a line!
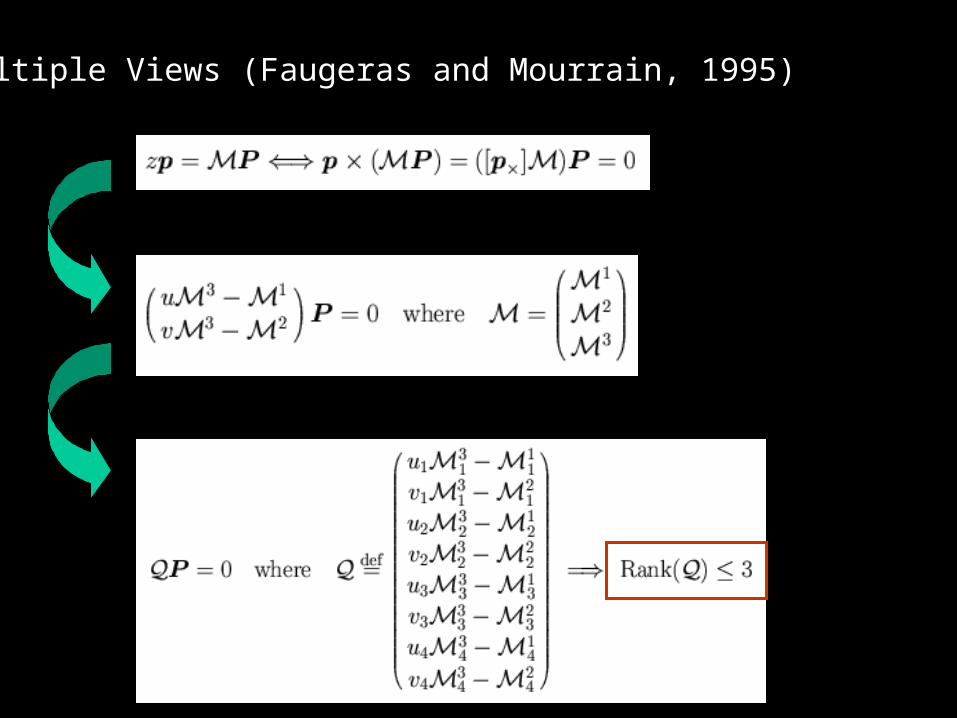
Multiple Views (Faugeras and Mourrain, 1995)
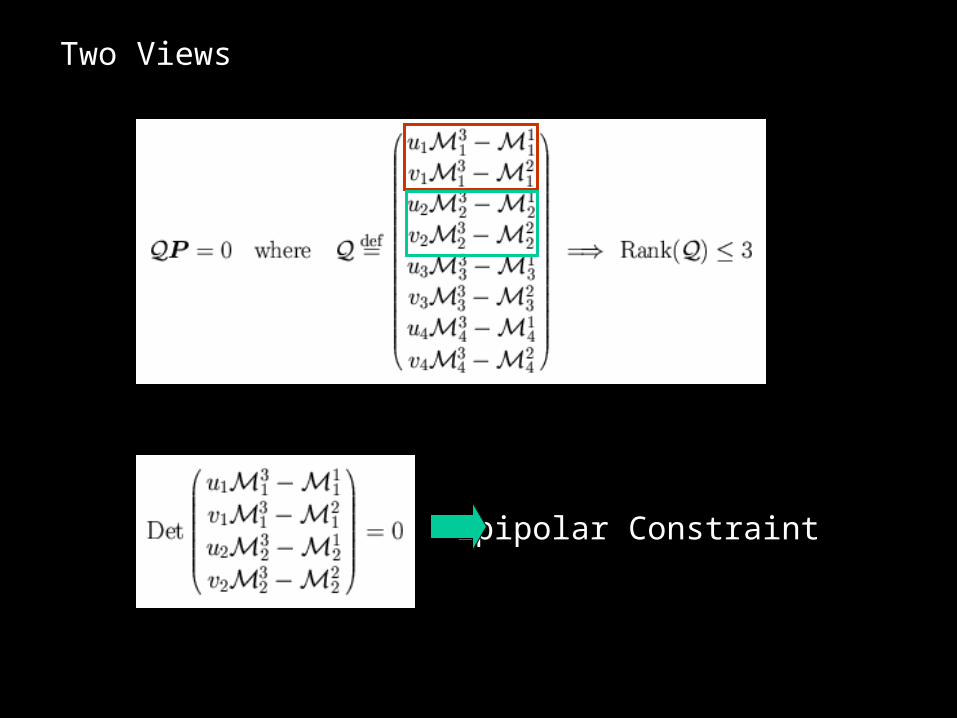
Two Views
Epipolar Constraint
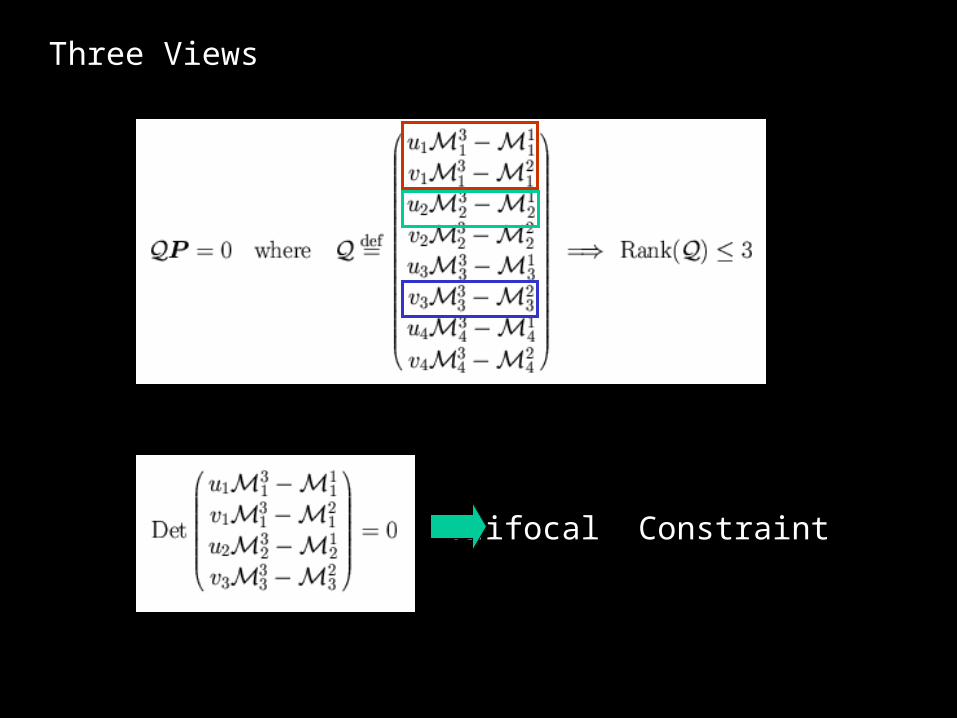
Three Views
Trifocal Constraint
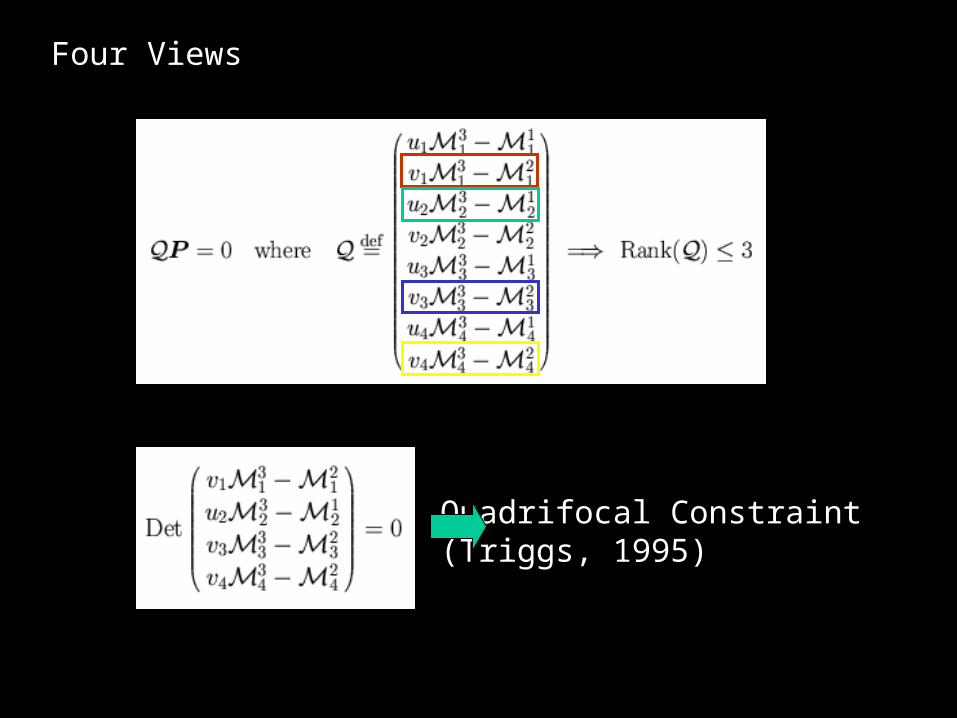
Four Views
Quadrifocal Constraint(Triggs, 1995)
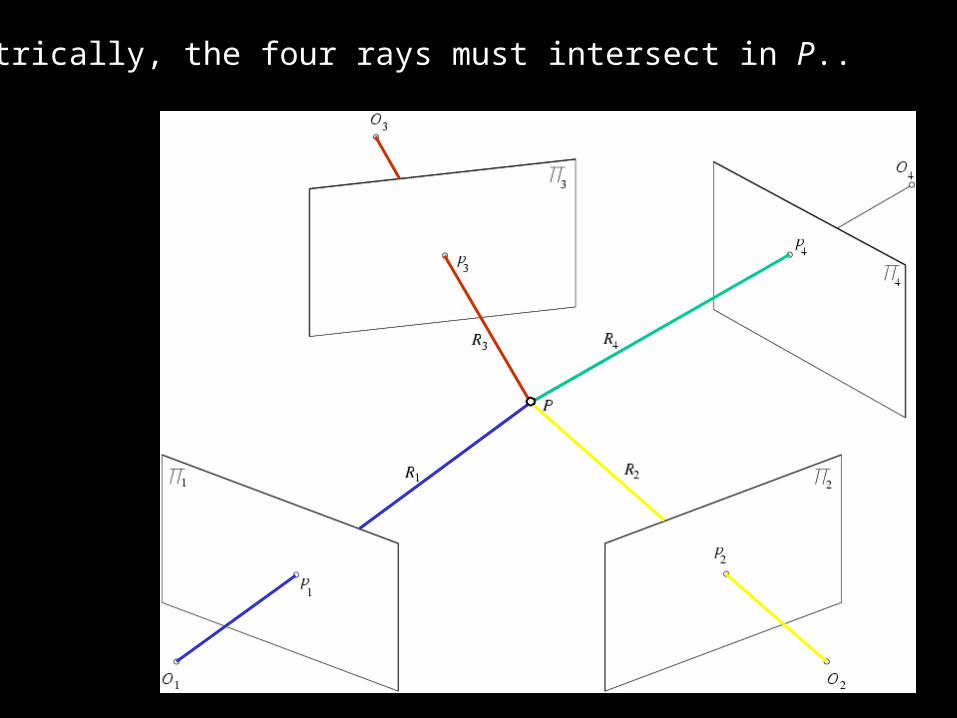
Geometrically, the four rays must intersect in P..
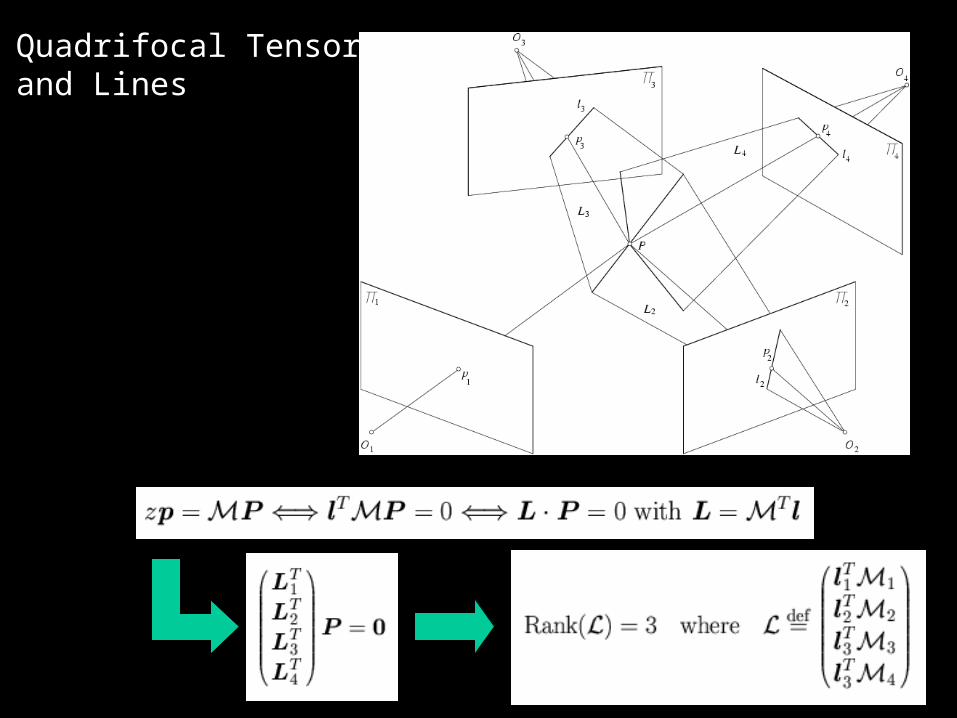
Quadrifocal Tensorand Lines
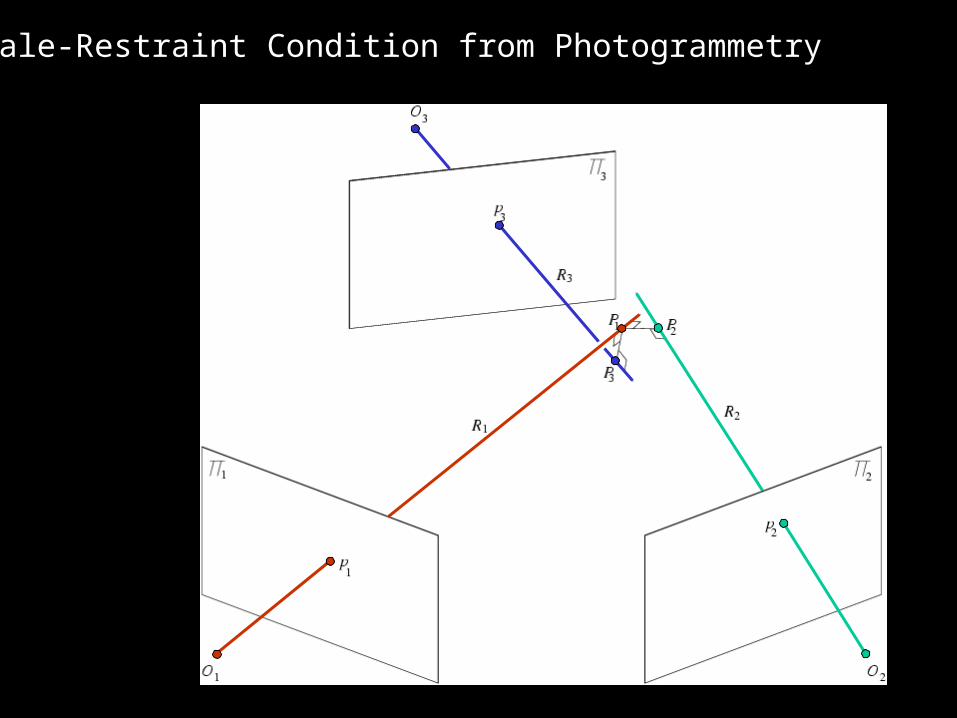
Scale-Restraint Condition from Photogrammetry