Embed Size (px)
Citation preview



• Introduction ExRobotics
• Project scope
• Current status
• Planning
• Market survey
Agenda

The Company, ExRobotics
▪ ExRobotics is specialized in robotic solutions for potentially explosive facilities.
▪ We produce Ex certified robots (ATEX and IECEx Zone 1) that can carry out safety checks at remote facilities.

Basic project phasing
Q2/Q3- 2018 Q1-2019 Q4-2019
Demo & wall thickness
Phase C
Demonstration of locomotion
Phase B
Phase A
Inspection robot

Development phases internal pipe inspection robot project
0
1
2
3
4
5
6
7
8
9Te
chnolo
gy R
eadin
ess
Level (T
RL)
Current
status
2018
• Mechanical concept
available for 2” pipes
• 3D printed components
• Electrical hardware
available
• Not robust!
• Industrial prototype
available for 4” – 8” pipes.
• Robust enough for testing on
industrial sites.
• Tethered
• Works in clean pipes (no
Atex)
• Can pas gate values & ball
vales.
• No sensor, only camera for
navigation.
• Sensors for measurement of
wall thinness.
• Software available for
“auto” navigation
2018 - 2019
• Marketable product
available for operation
2019Consortium members are:
- Kic|Mpi
- ExRobotics B.V.
- University of Twente
- Looking for industry partner
Scope current project:
TRL6

Development phases internal pipe inspection robot project
0
1
2
3
4
5
6
7
8
9Te
chnolo
gy R
eadin
ess
Level (T
RL)
Current
status
2018
• Mechanical concept
available for 2” pipes
• 3D printed components
• Electrical hardware
available
• Not robust!
• Industrial proto type
available for 4” – 8” pipes.
• Robust enough for testing on
industrial sites.
• Tethered
• Works in clean pipes (no
Atex)
• Can pas gate values & ball
vales.
• No sensor, only camera for
navigation.
• Sensors for measurement of
wall thinness.
• Software available for
“auto” navigation
2018 - 2019
• Marketable product
available for operation
2019

Mobility Specs for TRL-6
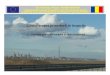
Inspection of straight pipelines, with diameter between 4 – 8 inch.
Horizontal & Vertical, Up & Down!
Inspection of straight pipelines with 90 degree (1D) turns in
every possible orientation
Inspection of straight pipelines with gate and ball valves full open.
Inspection of straight pipelines and T-joints with the same diameter.
Inspection of straight pipelines and T-joints with the different
diameter (minimum diameter 4 inch)
Principle

• Increase of weight
• Motion Control (software)
• Market requirements
Risks

Towards TRL 6 in 5 Steps• Phase A.1 Feasibility study
• Phase A.2: Test several parts or subsystems of the robot
• Friction test to estimate ??????
• Shape test to retrieve a defect robot
• Stress test clamping mechanism to optimise the design
• Phase A.3: Development 1e “triangle” of the robot
• Development and building
• Evaluate
• Phase A.4: Build full robot
• Phase A.5: Build and program the interface & peripheral equipment.
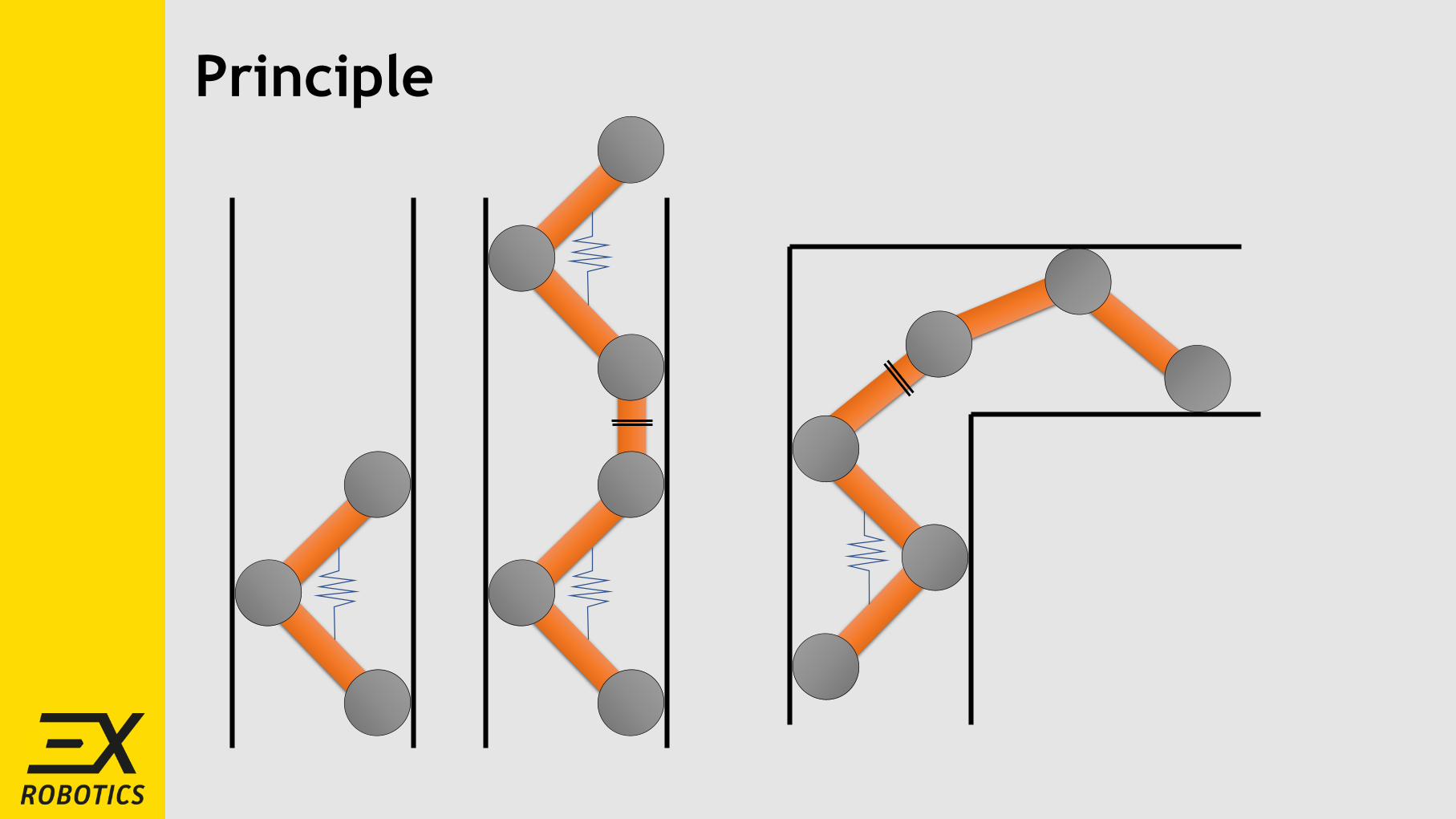
• Investigated current design of UT. Impressive!
………. try to improved it.
• Spoke with several suppliers to investigated of the self components.
• First basic design (0.0) ready to fit demands.
• Add requirement for retrieval of robot on failure.
• Add requirement on electrical architecture
Current status: Phase A.2 & A.3
UT shape New shape

Current status

Mobility Specs for TRL-6
Inspection of straight pipelines, with diameter between 4 – 8 inch.
Horizontal & Vertical, Up & Down!
Inspection of straight pipelines with 90 degree (1D) turns in
every possible orientation
Inspection of straight pipelines with gate and ball valves full open.
Inspection of straight pipelines and T-joints with the same diameter.
Inspection of straight pipelines and T-joints with the different
diameter (minimum diameter 4 inch)
Scope change4-6 or 6-8

Planning
Output:
- Friction
- Clamping forces
- Torque
Output:
- Relation between wheel
material, clamping
forces and material
tube.
Output:
- Experiment for clamping
mechanism
Output:
- Demonstration of half
robot.

• Akzo
• Basf
• Dow
• DSM
• Adnoc
Conclusion: Market requirements not clear!
Market survey


Thanks

Ontwikkeling naar TRL 6 bestaat uit 5 fases• Fase A.1 Haalbaarheidsstudie
Verschillende aspecten van de robot worden in de basis benaderd om te kijken of het
concept haalbaar is.
• Fase A.2: Testen van onderdelen
Er worden verschillende tests ontwikkeld en uitgevoerd om de haalbaarheid te
bevestigen en om verschillende componenten te ontwerpen. (sterkte vs levensduur vs
gewicht)”
• Frictie test voor de keuze van het wiel materiaal
• Vorm test ( 3d reproductie ) om in te schatten of een dode robot terug uit een pijp
kan.
• Stress test klemmechanisme om de kleinste modulus en breedte te bepalen.
• Fase A.3: ontwikkeling 1e “driehoek” van de robot.
• Ontwerp en bouwen van een eerste klemmechanisme van de robot
• Evalueren driehoek
• Fase A.4: Bouwen volledige robot
• Fase A.5: Interface + rand apparatuur ontwikkelen.

Development towards TRL 6• Phase A.1 Feasibility study
Several features of the robot are studied to verify the feasibility
• Phase A.2: Test several parts or subsystems of the robot
• Several test are being developed and performed to validate subsystems
• Friction test: wheel material and clamping force
• Shape test ( 3d reproduction ) to retrieve a defect robot.
• Stress test clamping mechanism to optimise the design
• Phase A.3: Development 1e “triangle” of the robot
• Development of the first clamping mechanism with three wheels.
• Evaluate
• Phase A.4: Build full robot
• Phase A.5: Build and program the interface & peripheral equipment .


![Lausberg, Heinrich (2004) Elementos de Retorica Literaria [F. Calouste Gulbenkian] - bad copy.pdf](https://img.pdfslide.us/doc/110x75/577c7e791a28abe054a14ea8/lausberg-heinrich-2004-elementos-de-retorica-literaria-f-calouste-gulbenkian.jpg)