Embed Size (px)
Citation preview

Project Icarus
User Manual
Anthony Jantzi, Aaron Mininger, and Shawn Recker
4/29/2011Comp 452 – Senior Project II
Editor: Shawn Recker
Table of ContentsIntroduction.................................................................................................................................................2
Purpose of System...................................................................................................................................2
Hardware and Software Requirements...................................................................................................2
Installation Instructions...............................................................................................................................2
Operating Instructions.................................................................................................................................2
Connecting to the Quadrotor..................................................................................................................2
Running the Application..........................................................................................................................4
Sensors and Video...................................................................................................................................5
Controlling the Quadrotor.......................................................................................................................6
ARDrone Settings.....................................................................................................................................6
Recording a Session.................................................................................................................................7
Playing a Session......................................................................................................................................7
Maintenance Instructions............................................................................................................................8
Ethics and Regulation Compliance...............................................................................................................9
Ethical Considerations.............................................................................................................................9
Compliance with Apple Regulations........................................................................................................9
Bibliography................................................................................................................................................9

IntroductionThis section provides an overview of the system, including its purpose and the hardware and software requirements.
Purpose of SystemProject Icarus is an application for the Apple iPad that connects with the AR.Drone Parrot quadcopter. This application is designed to provide a natural real-time control scheme for the Parrot using virtual controls operated through touch. The system supports in flight data collection through the recording, saving and playback of data sessions.
Hardware and Software RequirementsProject Icarus can be used with any generation of the Apple® iPad hardware. The system makes use of the features of iOS 4.3, primarily multi-tasking;, however, it is compatible with previous versions of the iOS software.
Project Icarus is compatible with the Parrot AR.Drone quadcopter (1) and connects via a Wi-Fi hotspot created by the drone.
Installation InstructionsProject Icarus can be installed through the Apple App Store. In order to install the application first start the iPad. Once the iPad is turned on and unlocked navigate to the app store icon and tap it. Once the app store application loads tap the search bar at the top and type in “Project Icarus” and then hit search. After the search results load find the Project Icarus App. It will have the following icon:
Click the install button next to the icon to install the application. The app will appear on the iPad desktop and can be operated through the instructions that follow.
Operating InstructionsThis section details the correct use of the software and its various features.
Connecting to the QuadrotorNote: Before use, the quadrotor should be on and sitting on a flat stable surface.
Before launching the application, the iPad should be wirelessly connected to the quadrotor.

If the Icarus application is already running, press the home button on the iPad to return to the home screen. From the home screen, tap the Settings icon to open up the settings page.
Select the Wi-Fi item from the menu on the left. Make sure that Wi-Fi is turned on, and that the iPad is wirelessly connected to the quadrotor. If it is, there will be a checkmark next to the network name in the list under ‘Choose a Network…’ (The network name will probably be prefixed with the word ‘ardrone’). If it is not connected, tap its network name in the list. A checkmark will then appear next to it once the iPad has successfully connected.

Running the ApplicationOnce the iPad is connected to the quadrotor, start the application by tapping on the Project Icarus icon on the main screen. It will start and display the flight screen:
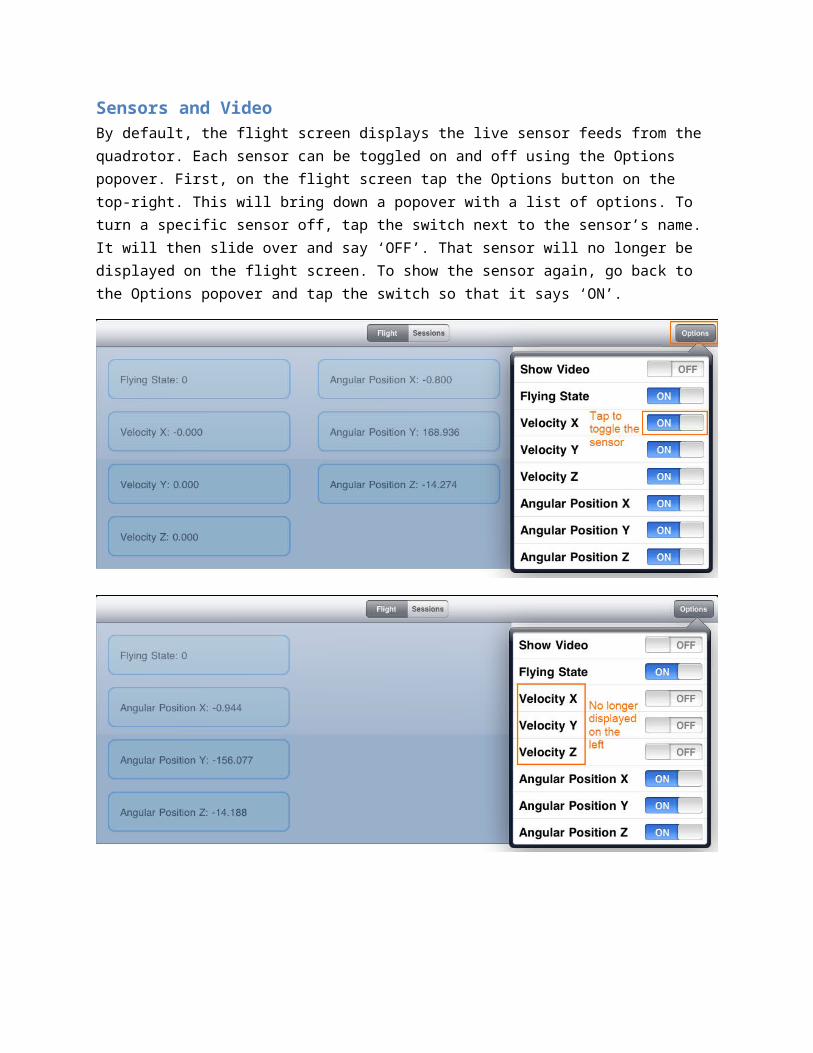
Sensors and VideoBy default, the flight screen displays the live sensor feeds from the quadrotor. Each sensor can be toggled on and off using the Options popover. First, on the flight screen tap the Options button on the top-right. This will bring down a popover with a list of options. To turn a specific sensor off, tap the switch next to the sensor’s name. It will then slide over and say ‘OFF’. That sensor will no longer be displayed on the flight screen. To show the sensor again, go back to the Options popover and tap the switch so that it says ‘ON’.

A live video feed from the quadrotor can also be displayed. From the flight screen, tap the Options button in the top-right. Then tap the switch labeled ‘Show Video’. It will then turn to the ‘ON’ position and the sensor display will be replaced by a video display. Tapping the switch again will hide the video and once again display the sensors. From the flight screen, different video configurations can be iterated through by tapping the rotation icon right above the Take Off button.
Controlling the QuadrotorNote: Before flying the quadrotor make sure that it is on a flat and stable surface and that the area around it is clear.
The flight screen contains all the controls needed to fly the quadrotor. Firstly, tap the Take Off button. This will cause the quadrotor to take off and start hovering a few feet off the ground. When in the air, the Take Off button will change to display the word Land. If the quadrotor is flying over an open and level area, tap the Land button to safely land it. In the event of an emergency, tap the KILL button to kill the rotors and cause an emergency landing.
Two joysticks are available to control the quadrotor while it is in the air. Each joystick is operated by touching and holding on a joystick area in one of the two bottom corners. The joystick will center to the touch, and dragging away from the center will move the quadrotor in some way. The left joystick controls horizontal movement. Dragging up from the center will move it forward and dragging down from the center will move it backward. Dragging left and right from the center will cause it to strafe left and right respectively. The right joystick controls altitude and rotation. Dragging up and down will cause the quadrotor to rise up and down. Dragging left and right will rotate the quadrotor left (counter-clockwise) or right (clockwise). Releasing the touch will stop inputs from that joystick.
ARDrone SettingsAdvanced flight settings can be accessed by tapping the icon with the gear below the Take Off button. These settings are provided by Parrot specifically for the AR.Drone and are not part of our design. For more information about those setting visit http://ardrone.parrot.com.

Recording a SessionA session is a saved collection of sensor data captured from the quadrotor. To start recording a session tap the Start Recording button on the main flight screen. It will change to the Stop Recording button which will stop recording and save the session when pressed.
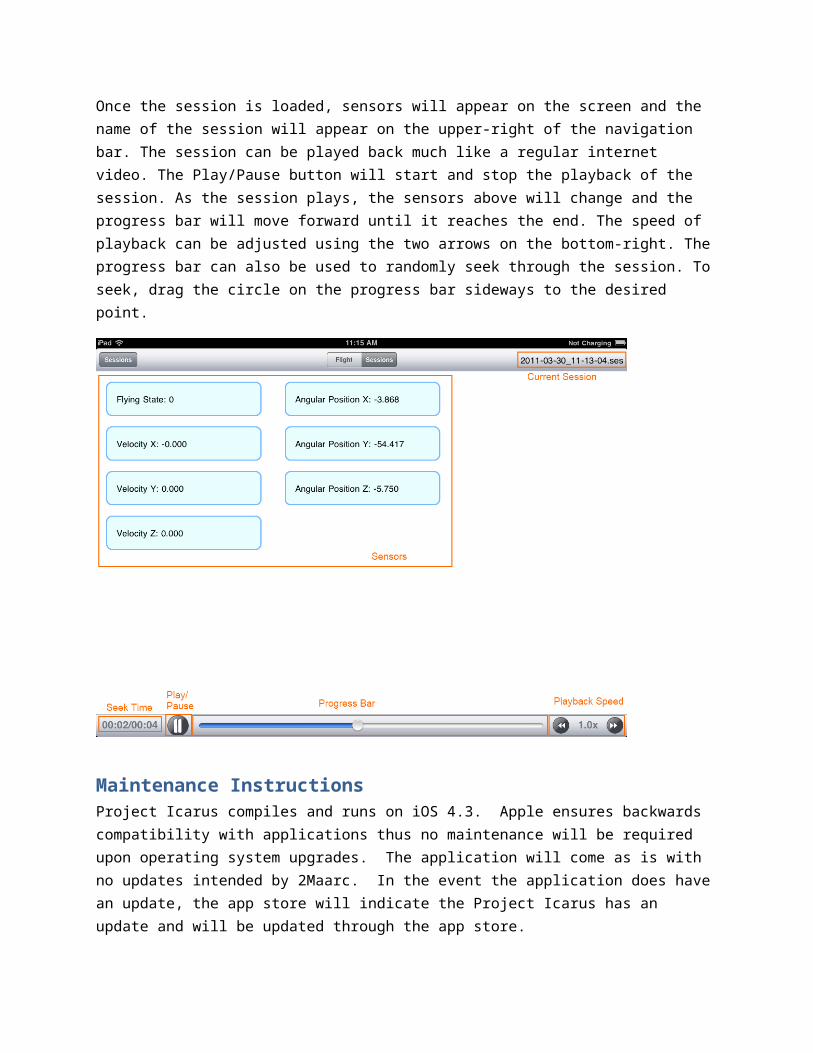
Playing a SessionSaved sessions can be played back using the application. First, switch to the sessions screen by tapping the Sessions tab on the segmented control at the top. This will switch the application to the Sessions screen.
To open a saved session, tap the Sessions button on the upper-left. A popover will appear showing a list of the saved sessions on the device. Each session will be marked with a timestamp and will be sorted with the newest at the top of the list. Load a session by selecting it in the list.

Once the session is loaded, sensors will appear on the screen and the name of the session will appear on the upper-right of the navigation bar. The session can be played back much like a regular internet video. The Play/Pause button will start and stop the playback of the session. As the session plays, the sensors above will change and the progress bar will move forward until it reaches the end. The speed of playback can be adjusted using the two arrows on the bottom-right. The progress bar can also be used to randomly seek through the session. To seek, drag the circle on the progress bar sideways to the desired point.
Maintenance InstructionsProject Icarus compiles and runs on iOS 4.3. Apple ensures backwards compatibility with applications thus no maintenance will be required upon operating system upgrades. The application will come as is with no updates intended by 2Maarc. In the event the application does have an update, the app store will indicate the Project Icarus has an update and will be updated through the app store.
The application stores flight data sessions for future playback. The application will store as many sessions as will fit on the iPad. The owner of the application should periodically delete unused or unwanted sessions to avoid wasted storage.
Ethics and Regulation ComplianceThis section discusses ethical concerns involving Project Icarus, as well as how the application complies with Apple’s regulations.
Ethical ConsiderationsOne of the ethical concerns for Project Icarus is the damage that the Parrot quadcopter can cause to itself and things around it. While the Parrot has been designed to minimize the amount of danger, damage or harm to human beings or other objects is a concern. The application description on the App Store will provide warnings to users explaining the dangers and how to avoid them. There is also the concern that a wayward user or could crash the quadcopter and cause serious damage to it, resulting in costly repair parts or a replacement. This danger is mitigated through the programming of the Parrot, which is designed to avoid crashing as much as possible.
Another concern involved in Project Icarus is invasion of privacy with the Parrot camera. Though the camera is meant to be used for navigation, a devious user could use it for spying. There is little than can be done to prevent a user from doing so, but users will be made aware that they are fully responsible for consequences of using the software, including any violation of law. This warning will be displayed in the App Store description.
Compliance with Apple RegulationsThe Project Icarus app has been designed to meet all of Apple's regulations for submission to the App Store. In addition, Apple's coding standards were followed as much as possible to ensure the app would function correctly and work well with Apple's built-in tools (2).
Bibliography
Parrot AR.Drone
1. "Parrot AR.Drone". [Online] [Cited: October 13, 2010.] http://ardrone.parrot.com/parrot-ar-drone/usa/.
Official website of the Parrot drone.
2. "ARDrone Open API platform". [Online] [Cited: December 11, 2010.] https://projects.ardrone.org/.
Contains the download links for the API and licensing information.
3. AR. Drone Pricing. [Online] [Cited: October 11, 2010.] http://www.brookstone.com/ar-drone-quadricopter.html.
Source of drone pricing information used for the budget estimates.
Apple iPad and Developer Information
4. iPad Pricing. [Online] [Cited: October 16, 2010.] http://store.apple.com/us.
The Apple store which provided the pricing information for the iPad.
5. Apple Incorporated. "iPhone Human Interface Guidelines". [Online] 2010. [Cited: October 15, 2010.] http://developer.apple.com/library/ios/documentation/UserExperience/Conceptual/MobileHIG/index.html.

The human interface guidelines specified by Apple for the iPhone. These were used to guide our interface design.
6. Apple Incorporated. "iPad Human Interface Guidelines". [Online] 2010. [Cited: October 15, 2010.] http://developer.apple.com/library/ios/#documentation/General/Conceptual/iPadHIG/Introduction/Introduction.html.
The human interface guidelines specified by Apple for the iPad. These were used to guide our interface design.
7. Andreas. "Show a Custom Popover View within Your iPad App". Seaside. [Online] April 9, 2010. [Cited: November 8, 2010.] http://blog.blackwhale.at/2010/04/show-a-custom-popover-view/.
A simple article and tutorial demonstrating how to show a popover in an iPad app.
8. "iOS Dev Center" [Online] 2010. [Cited: December 11, 2010] http://developer.apple.com/devcenter/ios/index.action.
The Apple development center for iOS. It contains links to download XCode and the iOS SDK. It also provides documentation for creating an application for iOS.
User-Interface Design
9. Lewis, Clayton and Rieman, John. "Task-Centered User Interface Design". [Online] 1994. [Cited: September 13, 2010.] http://hcibib.org/tcuid/.
This paper provides a guide on how to create a high-quality user interface.
10. Cavett, D.; Coker, M.; Jimenez, R.; Yaacoubi, B.; "Human-Computer Interface for Control of Unmanned Aerial Vehicles," Systems and Information Engineering Design Symposium, 2007. SIEDS 2007. IEEE , vol., no., pp.1-6, 27-27 April 2007.
This paper describes some qualities of a UAV interface that reduce the cognitive workload on an operator.
11. "Guide to Controlling Your Remote Controlled Quadrotor". Heliguy. [Online] 2010. [Cited: October 15, 2010.] http://www.heliguy.com/nexus/controlls.html.
This page describes traditional quadrotor control design which we used when determining what the joysticks should do.
12. Quigley, M.; Goodrich, M.A.; Beard, R.W.; "Semi-autonomous human-UAV interfaces for fixed-wing mini-UAVs," Intelligent Robots and Systems, 2004. (IROS 2004). Proceedings. 2004 IEEE/RSJ International Conference on , vol.3, no., pp. 2457- 2462 vol.3, 28 Sept.-2 Oct. 2004
This article describes general considerations for Human-UAV interfaces and describes interface considerations specifically for PDA devices.
13. Rackliffe, Nathan. An Augmented Virtuality Display for Improving UAV Usability. [Online] 2005. [Cited: October 31, 2010.] http://www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=ADA456335.
This article notes the potential downfalls of UAV interface design by imitating cockpit controls.
UAV and Quadrotor Information
14. Drewes, Peter and Franke, Jerry. Collaborative Unmanned Operations for Maritime Security. [Online] 2008. [Cited: October 29, 2010.] http://www.atl.lmco.com/papers/1588.pdf.
This article describes Lockheed Martin's research into providing a command environment for unmanned vehicles.
15. Beard, Randal, et al. "Autonomous Vehicle Technologies for Small Fixed-Wing UAVs." Journal Of Aerospace Computing, Information, and Communication 2.1 (2005): 92-108
This article details the complete design and implementation of a UAV and documents interface design of the control environment.
16. Quadrocopter and Tricopter Info Mega Link Index!! - RC Groups. RCGroups.com: The ABCs of Radio Control - Aircraft, Boats, and Cars! [Online] [Cited: November 8, 2010.] http://www.rcgroups.com/forums/showthread.php?t=1097355.
This webpage displays a list of common flying aerial vehicles. This was used to determine a good testing platform.
17. “Building a Quadrotor Quadrotor UAV”. National Instruments. [Online] [Cited: November 8, 2010.] http://decibel.ni.com/content/blogs/quadrotor.
This webpage holds a series of articles describing the process one man went through to build a quadrotor himself.
18. Achtelik, Markus, et al. “Autonomous Navigation and Exploration of a Quadrotor Quadrotor in GPS-denied Indoor Environments”. First Symposium on Indoor Flight Issues. [Online] [Cited: November 8, 2010.] http://iarc.angel-strike.com/symposium2009.php.
This paper describes some of the techniques used to implemented autonomous navigation and exploration without the aid of GPS. This paper may be of aid when actually programming scripts to run on the machine.
International Aerial Robotics Competition
19. "International Aerial Robotics Competition". [Online] [Cited: November 8, 2010.] http://iarc.angel-strike.com/.
This is the official webpage for the IARC and provides general information about the contest.
20. "JAUS Interface Requirements for AUVSI Student Competitions". International Aerial Robotics Competition. [Online] March 5, 2009. [Cited: November 8, 2010.] http://www.usaric.org/Interop-Challenge-2009.pdf.
This paper outlines the wireless protocol requirements for the IARC.
Patents
2
1. Shantz, Michael and Keennon, Matthew. "Radio Controlled Quadrotor". United States of America, Novemeber 15, 2006.

Patent for a remote controlled quadrotor, similar in concept but no necessarily design to the one to be used as a part of Project Icarus.
22. Lord, Douglas W. "Quadrotor Remote Control System". 5015187 United States of America, May 14, 1991.
Patent for a system to control a remote controlled quadrotor that includes video feed, as well as other information such as altitude, directional reference, and wind speed. Designed to simulate control of an actual quadrotor for training purposes.
23. Jermyn, Phillip. "Flying Apparatus". United States of America, May 29, 2009.
Patent for a quadcopter similar to the one being built as part of Project Icarus. Patent is still pending, but the design is similar to the one that will be controlled by the system.
Licensing Information
24. Licenses. "Creative Commons". [Online] [Cited: December 6, 2010.] http://creativecommons.org/about/licenses.
Reference on the different types of Creative Commons Licenses, used to determine which license would be used for Project Icarus.
25. “GNU General Purpose License, version 2”. [Online] June 1991 [Cited: December 11, 2010.] http://www.gnu.org/licenses/gpl-2.0.html
The terms of the GNU GPL version 2 which we considered using for our license.