-
Introduction to geometrical non-linearities
Prof. Dr. Eleni ChatziDr. Giuseppe Abbiati, Dr. Konstantinos
Agathos
Lecture 4 - 19 October, 2017
Institute of Structural Engineering, ETH Zürich
October 19, 2017
Institute of Structural Engineering Method of Finite Elements II
1
-
Outline
1 Introduction
2 An example of geometrical non-linearity
3 The deformation gradient
4 Non-linear strain measures
5 Stress measures
6 Constitutive equations
7 Weak form of equilibrium equations
8 Linearization of the weak form
Institute of Structural Engineering Method of Finite Elements II
2
-
Learnig goals
Understanding limitations of geometrically linear analysis
Understanding different nonlinear strain measures
Understanding different definitions of stress
Understanding how the weak form is linearized
Institute of Structural Engineering Method of Finite Elements II
3
-
Significance of the lecture
Applications:
Structures undergoing large displacements and/or rotationssuch
as cables, arches and shells
Materials such as elastomers and biological/soft tissue
Modeling of plastically deforming materials
Institute of Structural Engineering Method of Finite Elements II
4
-
Large displacements of a rigid beam
Small displacements
Example taken from: “Nonlinear Finite Element Methods” by P.
Wriggers,Springer, 2008
Institute of Structural Engineering Method of Finite Elements II
5
-
Large displacements of a rigid beam
Small displacements
Equilibrium equation:
Fl = cϕ
Example taken from: “Nonlinear Finite Element Methods” by P.
Wriggers,Springer, 2008
Institute of Structural Engineering Method of Finite Elements II
5
-
Large displacements of a rigid beam
Small displacements
Equilibrium equation:
Fl = cϕ
Large displacements
Example taken from: “Nonlinear Finite Element Methods” by P.
Wriggers,Springer, 2008
Institute of Structural Engineering Method of Finite Elements II
5
-
Large displacements of a rigid beam
Small displacements
Equilibrium equation:
Fl = cϕ
Large displacements
Equilibrium equation:
Fl cos (ϕ) = cϕ
Example taken from: “Nonlinear Finite Element Methods” by P.
Wriggers,Springer, 2008
Institute of Structural Engineering Method of Finite Elements II
5
-
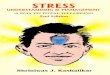
Large displacements of a rigid beam
0 20 40 60 80
ϕ
0
2
4
6
8
10
Fl c
Small displacements
Large displacements
Force versus rotation
Example taken from: “Nonlinear Finite Element Methods” by P.
Wriggers,Springer, 2008
Institute of Structural Engineering Method of Finite Elements II
6
-
Large displacements of a rigid beam
In the previous example the beam was considered rigid
Non linear strain measures would have to be used to take
intoaccount the beam flexibility
In the following non linear strain measures are introduced
Institute of Structural Engineering Method of Finite Elements II
7
-
Reference/current configuration
We consider a deformable body described by a set of material
points.We define two states of the body:
Reference configuration → Configuration of the body in
thebeginning of the deformation (usually undeformed).
Current configuration → Configuration of the body
(usuallydeformed) at a given time t.
Institute of Structural Engineering Method of Finite Elements II
8
-
Description of motion
x (X, t) = X + u (X, t)
where
x (X, t) location incurrent configuration
X location in referenceconfiguration
u (X, t) displacementvector
Institute of Structural Engineering Method of Finite Elements II
9
-
The deformation gradient
We define the deformation gradient as:
F = ∇x (X, t) = ∇ (X + u (X, t))⇒ F = I +∇u (X, t)
⇒ Fij = δij +duidXj
Institute of Structural Engineering Method of Finite Elements II
10
-
The deformation gradient
Infinitesimal element in the deformed configuration:
dx = d (X + u (X, t))= dX +∇u (X, t) dX= (I +∇u (X, t)) dX
⇒ dx = FdX⇒ dxi = FijdXj
→ F maps infinitesimal line elements from the reference to
thedeformed configuration
Institute of Structural Engineering Method of Finite Elements II
11
-
The deformation gradient
Expression for the deformation gradient:
F = ∇x =
x1,1 x1,2 x1,3x2,1 x2,2 x2,3x3,1 x3,2 x3,3
It follows that:
J = detF 6= 0
dX = F−1dx
Institute of Structural Engineering Method of Finite Elements II
12
-
Transformation of area and volume elements
Area is transformed as:
da = nda = JF−T NdA = JF−T dA
where:
da = nda is the area element in the current configurationdA =
NdA is the area element in the reference configuration
And volume as:
dv = JdV
where:
dv is the volume element in the current configurationdV is the
volume element in the reference configuration
Institute of Structural Engineering Method of Finite Elements II
13
-
Strain measures
We consider the square of an infinitesimal element in thecurrent
configuration:
dx · dx = (FdX) · (FdX) = dX ·(
FT F)· dX
C = FT F → right Cauchy-Green deformation tensor
Institute of Structural Engineering Method of Finite Elements II
14
-
Green-Lagrange strain
Difference of squares of lengths of infinitesimal elements:
dx · dx− dX · dX =dX ·(
FT F)· dX− dX · dX =
=dX ·(
FT F− I)· dX
E = 12(
FT F− I)
= 12 (C− I) → right Green-Lagrange strain tensor
E = 12[(I +∇u)T (I +∇u)− I
]= 12
(∇u +∇uT +∇uT∇u
)
In 1D: E = l2 − L22L2 , where L is the reference length, l is
the current
Institute of Structural Engineering Method of Finite Elements II
15
-
Strain measures
We consider the square of an infinitesimal element in
thereference configuration:
dX · dX =(
F−1dx)·(
F−1dx)
= dx ·(
F−T F−1)· dx
c = F−T F−1 → Cauchy deformation tensor
Institute of Structural Engineering Method of Finite Elements II
16
-
Euler-Almansi strain
Difference of squares of lengths of infinitesimal elements:
dx · dx− dX · dX =dx · dx− dx ·(
F−T F−1)· dx =
=dx ·(
I− F−T F−1)· dx
e = 12(
I− F−T F−1)
= 12 (I− c) → Euler-Almansi strain tensor
In 1D: e = l2 − L2
2l2 , where L is the reference length, l is the current
Institute of Structural Engineering Method of Finite Elements II
17
-
Comparison of strain measures
Green-Lagrange strain tensor: E = 12 (C− I)
Almansi strain tensor: e = 12(−1)(C−1 − I
)Both of the above are members of the Seth-Hill family of
strainmeasures: E(m) = 12m (C
m − I)
Another special case is the logarithmic strain: E(0) = 12 ln
C
Institute of Structural Engineering Method of Finite Elements II
18
-
ExampleBar under rotation and stretch
Deformation gradient
F = ∇x =
lL cos (θ) − sin (θ)lL sin (θ) cos (θ)
Deformed configuration
x =[
x1x2
]=
lL cos (θ) X1 − sin (θ) X2lL sin (θ) X1 + cos (θ) X2
Institute of Structural Engineering Method of Finite Elements II
19
-
Example
Displacements
u =[
u1u2
]=
( l
L cos (θ)− 1)
X1 − sin (θ) X2lL sin (θ) X1 + (cos (θ)− 1) X2
Displacement gradient
∇u =
lL cos (θ)− 1 − sin (θ)lL sin (θ) cos (θ)− 1
Institute of Structural Engineering Method of Finite Elements II
20
-
Example
Linear strain measure
� = 12(∇u +∇uT
)=
l cos (θ)− LL (1− L) sin (θ)2L(1− L) sin (θ)2L cos (θ)− 1
Green-Lagrange strain
E = 12(∇u +∇uT +∇uT∇u
)=
l2 − L22L2 00 0
Institute of Structural Engineering Method of Finite Elements II
21
-
Cauchy stress tensor
Force per unit of deformed area: t(n) = lima→0
f(n)a =
df(n)
da
Cauchy stress tensor: t(n) = σσσ · n
Institute of Structural Engineering Method of Finite Elements II
22
-
1st Piola-Kirchoff stress tensor
Force per unit of undeformed area: t(N) = limA→0
f(N)A =
df(N)
dA
⇒ f(N) in deformed configuration
1st Piola-Kirchoff stress tensor: t(N) = P ·N
t(N)dA = t(n)da⇒ P ·NdA = σσσ · nda
nda = JF−T ·NdA
⇒ P = JσσσF−T
Institute of Structural Engineering Method of Finite Elements II
23
-
2nd Piola-Kirchoff stress tensor
Force per unit of undeformed area: T(N) = limA→0
F(N)A =
dF(N)
dA
⇒ F(N) in undeformed configuration
⇒ dF(N) = F−1df(N) transformation of the force vector
2nd Piola-Kirchoff stress tensor: T(N) = S ·N
⇒ dF(N) = F−1df(N) ⇒ S ·NdA = F−1P ·NdA⇒ S = F−1P
Institute of Structural Engineering Method of Finite Elements II
24
-
Comparison of stress measures
Stressmeasure
Cauchy stress(σ)
1st Piola-Kirchoffstress (P)
2nd Piola-Kirchoffstress (S)
Area Current Reference ReferenceForce Current Current
ReferenceTransform - P = JσσσF−T S = F−1P =
JF−1σσσF−T
Institute of Structural Engineering Method of Finite Elements II
25
-
St. Venant materials
St. Venant materials:
A linear relationship between Green-Lagrange strain and
secondPiola-Kirchhoff stress is assumed
The relationship corresponds to Hooke’s law for
infinitesimaldisplacements
Good approximation when displacements and rotations are largebut
deformations are small
Institute of Structural Engineering Method of Finite Elements II
26
-
St. Venant materials
Stress strain relationship:
S = DE
Using Voigt notation:
S11S22S33S23S13S12
=
D1111 D1122 D1133 D1123 D1113 D1112D2211 D2222 D2233 D2223 D2213
D2212D3311 D3322 D3333 D3323 D3313 D3312D2311 D2322 D2333 D2323
D2313 D2312D1311 D1322 D1333 D1323 D1313 D1312D1211 D1222 D1233
D1223 D1213 D1212
·
E11E22E33
2E232E132E12
where Dijkl are material parameters
Institute of Structural Engineering Method of Finite Elements II
27
-
St. Venant materials
In terms of E and ν the above can be written as:
S11S22S33S23S13S12
= E(1 + ν) (1− 2ν)
1− ν ν ν 0 0 0ν 1− ν ν 0 0 0ν ν 1− ν 0 0 00 0 0 1− 2ν2 0 0
0 0 0 0 1− 2ν2 0
0 0 0 0 0 1− 2ν2
·
E11E22E33
2E232E132E12
Institute of Structural Engineering Method of Finite Elements II
28
-
Hyperelastic materials
The above relation is not accurate for elastic
materialsundergoing large deformations
Those materials are identified as hyperelastic
Examples of such materials are rubber and soft tissue
For more details we refer to: Lecture Notes by Carlos A.
FelippaNonlinear Finite Element Methods (ASEN 6107)
Institute of Structural Engineering Method of Finite Elements II
29
https://www.colorado.edu/engineering/CAS/courses.d/NFEM.d/NFEM.Ch08.d/NFEM.Ch08.pdfhttps://www.colorado.edu/engineering/CAS/courses.d/NFEM.d/NFEM.Ch08.d/NFEM.Ch08.pdf
-
Weak form
Current configuration:∫v
σσσ : δedv =∫v
f · δudv +∫a
t · δuda
Reference configuration:∫V
S : δEdV =∫V
F · δUdV +∫A
T0 · δUdA
Institute of Structural Engineering Method of Finite Elements II
30
-
Weak form
Reference to current configuration:
∫V
S : δEdV =∫V
(JF−1σσσF−T
): δ(
FT eF)
dV =∫v
σσσ : δedv
Institute of Structural Engineering Method of Finite Elements II
31
-
Incremental solution
Incremental solution procedures are used due to the
nonlinearnature of the problem
Quantities are decomposed to their values at each step plus
anincrement
Two alternatives exist for the definition of the
referenceconfiguration
Institute of Structural Engineering Method of Finite Elements II
32
-
Total/updated Lagrangian formulation
Total Lagrangian (TL)
The initial configuration isthe reference configuration.
Stress & Strain measures atthe target
configuration(increment i + 1) arecomputed with respect tothe
initial configuration.
Derivatives and Integrals aretaken with respect to V(initial
conf.).
Updated Lagrangian (UL)
The previous increment isthe reference configuration.
Stress & Strain measures atthe target
configuration(increment i + 1) areevaluated with respect tothe
previous configuration(increment i).
Derivatives and Integrals aretaken with respect to v i .
Institute of Structural Engineering Method of Finite Elements II
33
-
Total Lagrangian formulation
∫V
S : δEdV =∫V
F · δUdV +∫A
T0 · δUdA
︸ ︷︷ ︸R
Displacements at increment i + 1:
ui+1 = ui + ∆u
Institute of Structural Engineering Method of Finite Elements II
34
-
Incremental decomposition of strains
By substituting in the definition of the Green-Lagrange
strain:
Ei+1 =12
[∇ui+1 +∇
(ui+1
)T+∇
(ui+1
)T∇ui+1
]= 12
[∇ui +∇
(ui)T
+∇(
ui)T∇ui
]︸ ︷︷ ︸
Ei
+
+ 12
[∇∆u +∇∆uT +∇
(ui)T∇∆u +∇∆uT∇ui
]︸ ︷︷ ︸
ei
+
+ 12[∇∆uT∇∆u
]︸ ︷︷ ︸
ηηη
Here ei is not to be confused with the Euler-Almansi
strainInstitute of Structural Engineering Method of Finite Elements
II 35
-
Incremental decomposition of strains
In the above the strain is decomposed as:
Ei+1 = Ei + ∆E = Ei + ei + ηηη
where:
Ei The strain at increment i∆E The strain increment
ei Linear with respect to ∆uηηη Nonlinear with respect to ∆u
Institute of Structural Engineering Method of Finite Elements II
36
-
Decomposition of virtual strains and stresses
We observe that the variation of Ei+1 is equal to the variation
of theincrement:
δEi = 0⇒ δEi+1 = δ∆E = δei + δηηη
Applying the incremental decomposition to stresses we
obtain:
Si+1 = Si + ∆S
Institute of Structural Engineering Method of Finite Elements II
37
-
Weak form
Applying the above decompositions to the weak form we
obtain:∫V
∆S : δ∆EdV +∫V
Si : δηηηdV = Ri+1 −∫V
Si : δeidV
∫V
Si : δeidV is known and has been moved to the RHS
Institute of Structural Engineering Method of Finite Elements II
38
-
Weak form
Applying the above decompositions to the weak form we
obtain:∫V
∆S : δ∆EdV +∫V
Si : δηηηdV = Ri+1 −∫V
Si : δeidV
∫V
Si : δeidV is known and has been moved to the RHS (why?)
Institute of Structural Engineering Method of Finite Elements II
38
-
Weak form
Applying the above decompositions to the weak form we
obtain:∫V
∆S : δ∆EdV +∫V
Si : δηηηdV = Ri+1 −∫V
Si : δeidV
∫V
Si : δeidV is known and has been moved to the RHS (why?)∫V
Si : δηηηdV is linear with respect to ∆u
Institute of Structural Engineering Method of Finite Elements II
38
-
Weak form
Applying the above decompositions to the weak form we
obtain:∫V
∆S : δ∆EdV +∫V
Si : δηηηdV = Ri+1 −∫V
Si : δeidV
∫V
Si : δeidV is known and has been moved to the RHS (why?)∫V
Si : δηηηdV is linear with respect to ∆u (why?)
Institute of Structural Engineering Method of Finite Elements II
38
-
Weak form
Applying the above decompositions to the weak form we
obtain:∫V
∆S : δ∆EdV +∫V
Si : δηηηdV = Ri+1 −∫V
Si : δeidV
∫V
Si : δeidV is known and has been moved to the RHS (why?)∫V
Si : δηηηdV is linear with respect to ∆u (why?)∫V
∆S : δ∆EdV is non linear with respect to ∆u
Institute of Structural Engineering Method of Finite Elements II
38
-
Weak form
Applying the above decompositions to the weak form we
obtain:∫V
∆S : δ∆EdV +∫V
Si : δηηηdV = Ri+1 −∫V
Si : δeidV
∫V
Si : δeidV is known and has been moved to the RHS (why?)∫V
Si : δηηηdV is linear with respect to ∆u (why?)∫V
∆S : δ∆EdV is non linear with respect to ∆u (why?)
Institute of Structural Engineering Method of Finite Elements II
38
-
Linearization of stresses
Applying the above decompositions to the weak form we
obtain:
For the variation of ∆E we assume:
δηηη = 0⇒ δ∆E = δei
since δηηη is higher order
For the stresses we employ the Taylor expansion:
∆S = ∂∆S∂∆E ·∆E =
∂∆S∂∆E ·
(ei + ηηη
)
Institute of Structural Engineering Method of Finite Elements II
39
-
Linearized Weak Form
Assuming linear elastic material response: ∂∆S∂∆E = D
Then the first term of the weak form becomes:
∫V
∆S : δEdV =∫V
(ei + ηηη
)T·D · δeidV
Institute of Structural Engineering Method of Finite Elements II
40
-
Linearized Weak Form
Assuming linear elastic material response: ∂∆S∂∆E = D
Then the first term of the weak form becomes:
∫V
∆S : δEdV =∫V
(ei + �ηηη
)T·D · δeidV
Institute of Structural Engineering Method of Finite Elements II
40
-
Linearized Weak Form
Assuming linear elastic material response: ∂∆S∂∆E = D
Then the first term of the weak form becomes:
∫V
∆S : δEdV =∫V
(ei)T·D · δedV
Institute of Structural Engineering Method of Finite Elements II
40
-
Linearized Weak Form
Assuming linear elastic material response: ∂∆S∂∆E = D
Then the first term of the weak form becomes:
∫V
∆S : δEdV =∫V
(ei)T·D · δedV
The linearized weak form is formulated as:∫V
ei ·D · δeidV
︸ ︷︷ ︸linear w.r.t. ∆u
+∫V
Si : δηηηdV
︸ ︷︷ ︸linear w.r.t. ∆u
= Ri+1 −∫V
Si : δedV
︸ ︷︷ ︸known
Institute of Structural Engineering Method of Finite Elements II
40
IntroductionAn example of geometrical non-linearityThe
deformation gradientNon-linear strain measuresStress
measuresConstitutive equationsWeak form of equilibrium
equationsLinearization of the weak form